第 5 章图像平滑滤波在MATLAB上的实现
本课程设计在MATLAB上实现的程序和结果
I=imread('b.bmp');
v=0.5*ones(size(I));
I1=imnoise(I,'localvar',v);
I2=imnoise(I,'salt & pepper',0.02);
I3=imnoise(I,'speckle',0.02);
figure;
subplot(221);
hold on;
title('原图像');
imshow(I);
hold off;
subplot(222);
hold on;
title('受高斯噪声污染的图像');
imshow(I1);
hold off;
subplot(223);
hold on;
title('受椒盐噪声污染的图像');
imshow(I2);
hold off;
subplot(224);
hold on;
title('受乘性噪声污染的图像');
imshow(I3);
hold off;
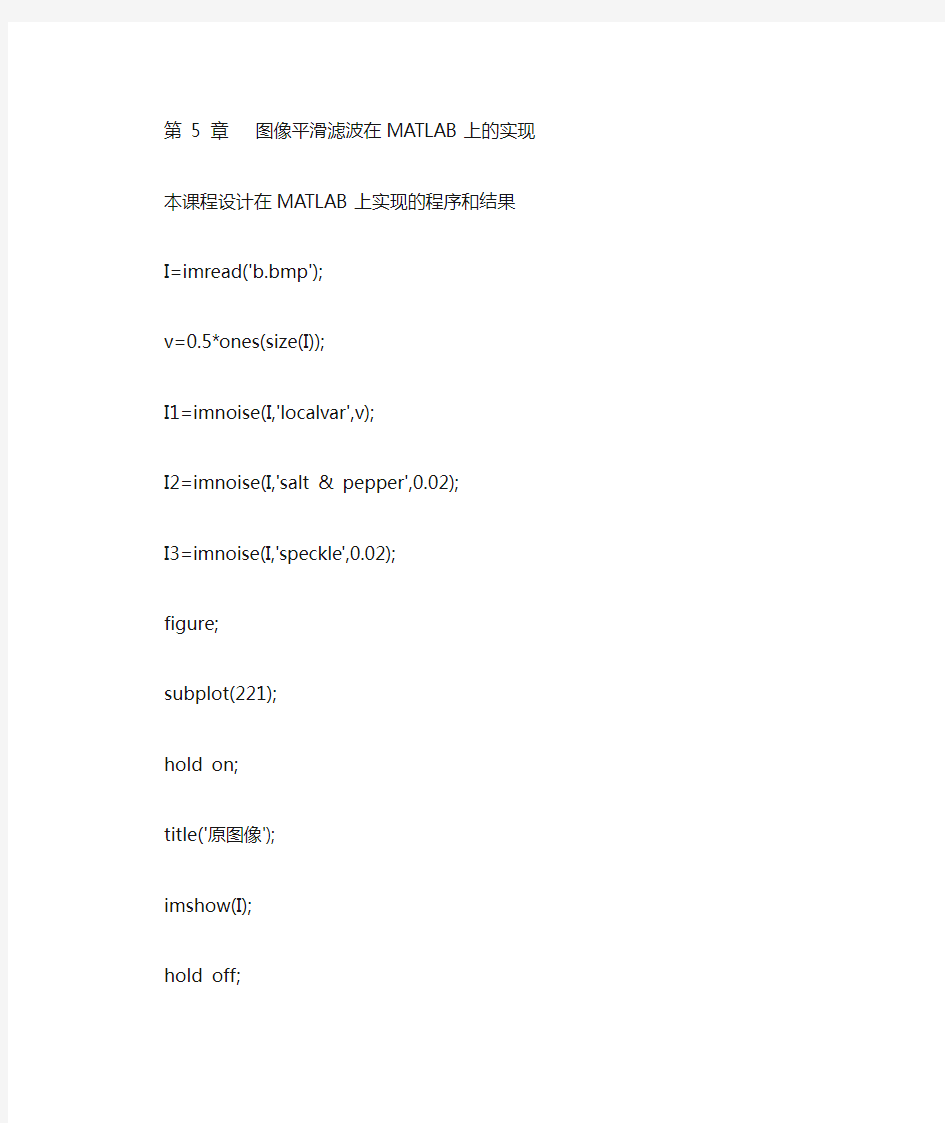
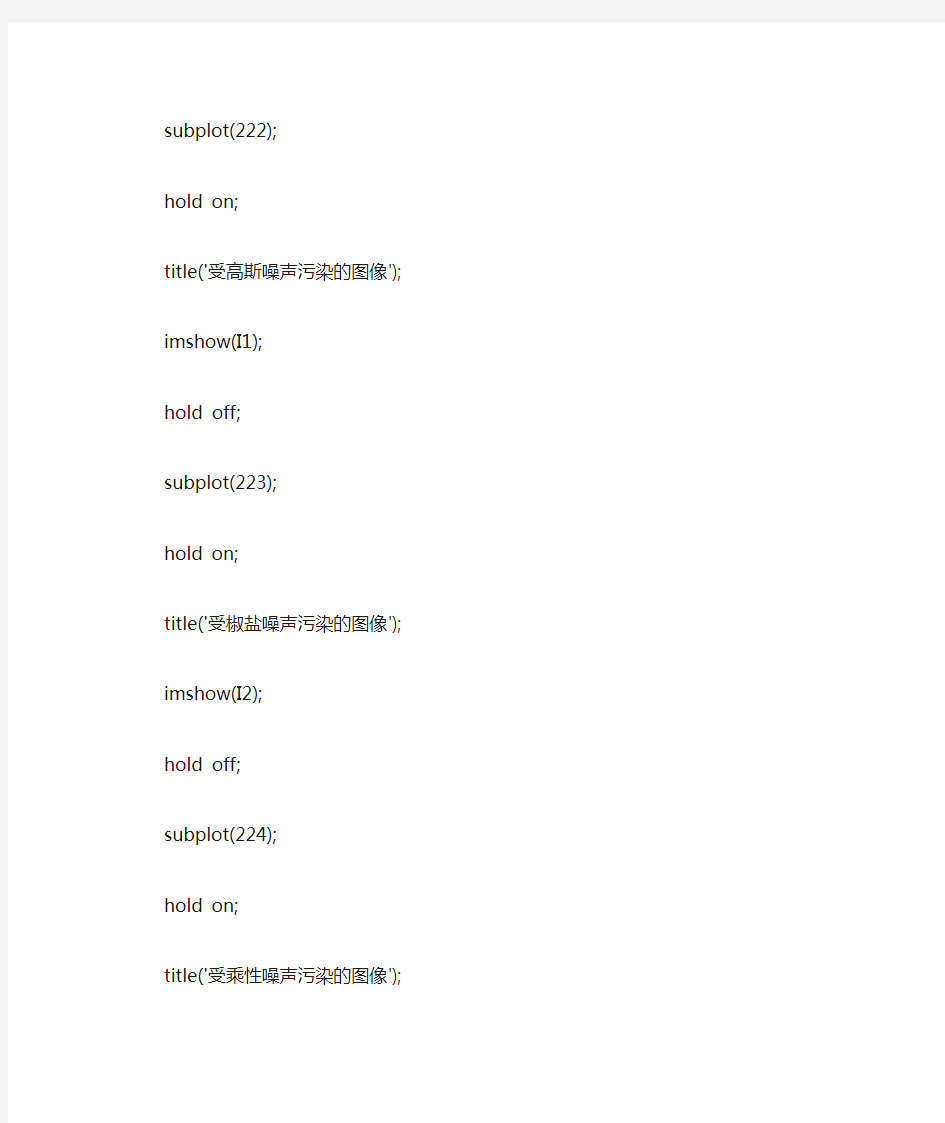
原图像受高斯噪声污染的图像
受椒盐噪声污染的图像受乘性噪声污染的图像
h=ones(3,3)/9;
J1=imfilter(I1,h);
J2=imfilter(I2,h);
J3=imfilter(I3,h);
figure;
subplot(221);
hold on;
title('原图像');
imshow(I);
hold off;
subplot(222);
hold on;
title('对有高斯噪声的3*3邻域平均后的图像');
imshow(J1);
hold off;
subplot(223);
hold on;
title('对有椒盐噪声的3*3邻域平均后的图像');
imshow(J2);
hold off;
subplot(224);
hold on;
title('对有乘性噪声的3*3邻域平均后的图像');
imshow(J3);
hold off;
原图像高斯噪声3*3邻域平均后的图像
椒盐噪声3*3邻域平均后的图像乘性噪声3*3邻域平均后的图像
h1=ones(5,5)/25;
K1=imfilter(I1,h1);
K2=imfilter(I2,h1);
K3=imfilter(I3,h1);
figure;
subplot(221);
hold on;
title('原图像');
imshow(I);
hold off;
subplot(222);
hold on;
title('对有高斯噪声的5*5邻域平均后的图像');
imshow(K1);
hold off;
subplot(223);
hold on;
title('对有椒盐噪声的5*5邻域平均后的图像');
imshow(K2);
hold off;
subplot(224);
hold on;
title('对有乘性噪声的5*5邻域平均后的图像');
imshow(K3);
hold off;
原图像高斯噪声5*5邻域平均后的图像
椒盐噪声5*5邻域平均后的图像乘性噪声的5*5邻域平均后的图像
L1=medfilt2(I1,[5,5]);
L2=medfilt2(I2,[5,5]);
L3=medfilt2(I3,[5,5]);
figure;
subplot(221);
hold on;
title('原图像');
imshow(I);
hold off;
subplot(222);
hold on;
title('高斯噪声5*5中值滤波后的图像');
imshow(L1);
hold off;
subplot(223);
hold on;
title('椒盐噪声5*5中值滤波后的图像');
imshow(L2);
hold off;
subplot(224);
hold on;
title('乘性噪声的5*5中值滤波后的图像');
imshow(L3);
hold off;
原图像高斯噪声5*5中值滤波后的图像
椒盐噪声5*5中值滤波后的图像乘性噪声的5*5中值滤波后的图像
[f1,f2]=freqspace(25,'meshgrid');
Hd=zeros(25,25);
d=sqrt(f1.^2+f2.^2)<0.5;
Hd(d)=1;
h=fsamp2(Hd);
figure;
freqz2(h,[64,64]);
-1
1
-1
F
x
F
y
M a g n i t u d e
I=imread('b.bmp'); v=0.5*ones(size(I));
I1=imnoise(I,'localvar',v);
I2=imnoise(I,'salt & pepper',0.02); I3=imnoise(I,'speckle',0.02); J1=imfilter(I1,h,'replicate'); J2=imfilter(I2,h,'replicate'); J3=imfilter(I3,h,'replicate'); figure;
subplot(221); hold on;
title('原图像'); imshow(I); hold off; subplot(222); hold on;
title('高斯噪声频域滤波后图像'); imshow(J1); hold off; subplot(223); hold on;
title('椒盐噪声频域滤波后图像'); imshow(J2); hold off;
subplot(224);
hold on;
title('乘性噪声频域滤波后图像');
imshow(J3);
hold off;
原图像高斯噪声频域滤波后图像
椒盐噪声频域滤波后图像乘性噪声频域滤波后图像
一个应用实例详解卡尔曼滤波及其算法实现 标签:算法filtermatlabalgorithm优化工作 2012-05-14 10:48 75511人阅读评论(25) 收藏举报分类: 数据结构及其算法(4) 为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。 在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不是100%的相信,可能会有上下偏差几度。 我们把这些偏差看成是高斯白噪声(White Gaussian Noise),也就是这些偏差跟前后时间是没有关系的而且符合高斯分配(Gaussian Distribution)。另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。 好了,现在对于某一分钟我们有两个有关于该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。 假如我们要估算k时刻的是实际温度值。首先你要根据k-1时刻的温度值,来预测k时刻的温度。因为你相信温度是恒定的,所以你会得到k时刻的温度预测值是跟k-1时刻一样的,假设是23度,同时该值的高斯噪声的偏差是5度(5是这样得到的:如果k-1时刻估算出的最优温度值的偏差是3,你对自己预测的不确定度是4度,他们平方相加再开方,就是5)。然后,你从温度计那里得到了k时刻的温度值,假设是25度,同时该值的偏差是4度。 由于我们用于估算k时刻的实际温度有两个温度值,分别是23 度和25度。究竟实际温度是多少呢?相信自己还是相信温度计呢?究竟相信谁多一点,我们可以用他们的covariance(协方差)来判断。因为Kg^2=5^2/(5^2+4^2),所以Kg=0.78,我们可以估算出k时刻的实际温度值是:23+0.78*(25-23)=24.56度。 可以看出,因为温度计的covariance比较小(比较相信温度计),所以估算出的最优温度值偏向温度计的值。 现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.56 度)的偏差。算法如下:((1-Kg)*5^2)^0.5=2.35。这里的5就是上面的k时刻你预测的那个23度
Matlab图像处理的几个实例(初学者用) 1.图像的基本信息及其加减乘除 clear,clc; P=imread('yjx.jpg'); whos P Q=imread('dt.jpg'); P=im2double(P); Q=im2double(Q); gg1=im2bw(P,0.3); gg2=im2bw(P,0.5); gg3=im2bw(P,0.8); K=imadd(gg1,gg2); L=imsubtract(gg2,gg3); cf=immultiply(P,Q); sf=imdivide(Q,P); subplot(421),imshow(P),title('郁金香原图'); subplot(422),imshow(gg1),title('0.3'); subplot(423),imshow(gg2),title('0.5'); subplot(424),imshow(gg3),title('0.8'); subplot(425),imshow(K),title('0.3+0.5'); subplot(426),imshow(L),title('0.5-0.3'); subplot(427),imshow(cf),title('P*Q'); subplot(428),imshow(sf),title('P/Q'); 2.图像缩放 clear,clc; I=imread('dt.jpg'); A=imresize(I,0.1,'nearest'); B=imresize(I,0.4,'bilinear'); C=imresize(I,0.7,'bicubic'); D=imresize(I,[100,200]); F=imresize(I,[400,100]); figure subplot(321),imshow(I),title('原图'); subplot(322),imshow(A),title('最邻近插值'); subplot(323),imshow(B),title('双线性插值'); subplot(324),imshow(C),title('二次立方插值'); subplot(325),imshow(D),title('水平缩放与垂直缩放比例为2:1'); subplot(326),imshow(F),title('水平缩放与垂直缩放比例为1:4');
图像读入 ●从图形文件中读入图像 imread Syntax: A = imread(filename, fmt) filename:指定的灰度或彩色图像文件的完整路径和文件名。 fmt:指定图形文件的格式所对应的标准扩展名。如果imread没有找到filename所制定的文件,会尝试查找一个名为filename.fmt的文件。 A:包含图像矩阵的矩阵。对于灰度图像,它是一个M行N列的矩阵。如果文件包含 RGB真彩图像,则是m*n*3的矩阵。 ●对于索引图像,格式[X, map] = imread(filename, fmt) X:图像数据矩阵。 MAP:颜色索引表 图像的显示 ●imshow函数:显示工作区或图像文件中的图像 ●Syntax: imshow(I) %I是要现实的灰度图像矩阵 imshow(I,[low high],param1, val1, param2, val2,...) %I是要现实的灰度图像矩阵,指定要显示的灰度范围,后面的参数指定显示图像的特定参数 imshow(RGB) imshow(BW) imshow(X,map) %map颜色索引表 imshow(filename) himage = imshow(...) ●操作:读取并显示图像 I=imread('C:\Users\fanjinfei\Desktop\baby.bmp');%读取图像数据 imshow(I);%显示原图像 图像增强 一.图像的全局描述 直方图(Histogram):是一种对数据分布情况的图形表示,是一种二维统计图表,它的两个坐标分别是统计样本和该样本对应的某个属性的度量。 图像直方图(Image Histogram):是表示数字图像中亮度分布的直方图,用来描述图象灰度值,标绘了图像中每个亮度值的像素数。 灰度直方图:是灰度级的函数,它表示图像中具有某种灰度级的像素的个数,反映了图 像中某种灰度出现的频率。描述了一幅图像的灰度级统计信息。是一个二维图,横坐标为图像中各个像素点的灰度级别,纵坐标表示具有各个灰度级别的像素在图像中出现的次数或概率。 归一化直方图:直接反应不同灰度级出现的比率。纵坐标表示具有各个灰度级别的像
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 基于MATLAB的图像处理的基本运算 初始条件: 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1)能够对图像亮度和对比度变化调整,并比较结果 (2)编写程序通过最近邻插值和双线性插值等算法将用户所选取的图像区域进行放大和缩小整数倍的和旋转操作,并保存,比较几 种插值的效果 (3)图像直方图统计和直方图均衡,要求显示直方图统计,比较直方图均衡后的效果。 (4)对图像加入各种噪声,比较效果。 时间安排: 指导教师签名:年月日 系主任(或责任教师)签名:年月日 目录 摘要.......................................................................................................................... 错误!未定义书签。 1 MATLAB简介 ........................................................................................................ 错误!未定义书签。2图像选择及变换................................................................................................... 错误!未定义书签。 2.1 原始图像选择读取....................................................................................... 错误!未定义书签。 2.1.1 原理图的读入与基本变换 .................................................................... 错误!未定义书签。
第 5 章图像平滑滤波在MATLAB上的实现 本课程设计在MATLAB上实现的程序和结果 I=imread('b.bmp'); v=0.5*ones(size(I)); I1=imnoise(I,'localvar',v); I2=imnoise(I,'salt & pepper',0.02); I3=imnoise(I,'speckle',0.02); figure; subplot(221); hold on; title('原图像'); imshow(I); hold off; subplot(222); hold on; title('受高斯噪声污染的图像'); imshow(I1); hold off; subplot(223); hold on; title('受椒盐噪声污染的图像'); imshow(I2); hold off; subplot(224); hold on; title('受乘性噪声污染的图像'); imshow(I3); hold off;
原图像受高斯噪声污染的图像 受椒盐噪声污染的图像受乘性噪声污染的图像 h=ones(3,3)/9; J1=imfilter(I1,h); J2=imfilter(I2,h); J3=imfilter(I3,h); figure; subplot(221); hold on; title('原图像'); imshow(I); hold off; subplot(222); hold on; title('对有高斯噪声的3*3邻域平均后的图像'); imshow(J1); hold off; subplot(223); hold on; title('对有椒盐噪声的3*3邻域平均后的图像'); imshow(J2); hold off; subplot(224); hold on; title('对有乘性噪声的3*3邻域平均后的图像'); imshow(J3);
信号与系统实验报告——图像处理 学院:信息科学与工程学院 专业:2014级通信工程 组长:** 组员:** 2017.01.02
目录 目录 (2) 实验一图像一的细胞计数 (3) 一、实验内容及步骤 (3) 二、Matlab程序代码 (3) 三、数据及结果 (4) 实验二图像二的图形结构提取 (5) 一、实验内容及步骤 (5) 二、Matlab程序代码 (5) 三、数据及结果 (6) 实验三图像三的图形结构提取 (7) 一、实验内容及步骤 (7) 二、Matlab程序代码 (7) 三、数据及结果 (8) 实验四图像四的傅里叶变化及巴特沃斯低通滤波 (9) 一、实验内容及步骤 (9) 二、Matlab程序代码 (9) 三、数据及结果 (10) 实验五图像五的空间域滤波与频域滤波 (11) 一、实验内容及步骤 (11) 二、Matlab程序代码 (11) 三、数据及结果 (12)
实验一图像一的细胞计数 一、实验内容及步骤 将该图形进行一系列处理,计算得到途中清晰可见细胞的个数。 首先,由于原图为RGB三色图像处理起来较为麻烦,所以转为灰度图,再进行二值化化为黑白图像,得到二值化图像之后进行中值滤波得到细胞分布的初步图像,为了方便计数对图像取反,这时进行一次计数,发现得到的个数远远多于实际个数,这时在进行一次中值滤波,去掉一些不清晰的像素点,剩下的应该为较为清晰的细胞个数,再次计数得到大致结果。 二、Matlab程序代码 clear;close all; Image = imread('1.jpg'); figure,imshow(Image),title('原图'); Image=rgb2gray(Image); figure,imshow(Image),title('灰度图'); Theshold = graythresh(Image); Image_BW = im2bw(Image,Theshold); Reverse_Image_BW22=~Image_BW; figure,imshow(Image_BW),title('二值化图像'); Image_BW_medfilt= medfilt2(Image_BW,[3 3]); figure,imshow(Image_BW_medfilt),title('中值滤波后的二值化图像'); Reverse_Image_BW = ~Image_BW_medfilt; figure,imshow(Reverse_Image_BW),title('图象取反'); Image_BW_medfilt2= medfilt2(Reverse_Image_BW,[20 20]); figure,imshow(Image_BW_medfilt2),title('第二次中值滤波的二值化图像'); [Label, Number]=bwlabel(Image_BW_medfilt,8);Number [Label, Number]=bwlabel(Image_BW_medfilt2,8);Number
基于M A T L A B图像处理报告一、设计题目 图片叠加。 二、设计要求 将一幅礼花图片和一幅夜景图片做叠加运算,使达到烟花夜景的美图效果。 三、设计方案 、设计思路 利用matlab强大的图像处理功能,通过编写程序,实现对两幅图片的像素进行线性运算,利用灰度变换的算法使图片达到预期的效果。 、软件介绍 MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。 MATLAB和Mathematica、Maple并称为三大数学软件。它在数学类科技应用软件中在数值计算方面首屈一指。MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。 MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB 也吸收了像Maple等软件的优点,使MATLAB成为一个强大的数学软件。在新的版本中也加入了对C,FORTRAN,C++,JAVA的支持。可以直接调用,用户也可以将自己编写的实用程序导入到MATLAB函数库中方便自己以后调用,此外许多的MATLAB爱好者都编写了一些经典的程序,用户直接进行下载就可以用。
用MATLAB实现频域平滑滤波以及图像去噪代码 悬赏分:50 - 解决时间:2008-11-8 14:21 是数字图象处理的实验,麻烦高人给个写好的代码,希望能在重要语句后面附上一定的说明,只要能在MATLAB上运行成功,必然给分。具体的实验指导书上的要求如下: 频域平滑滤波实验步骤 1. 打开Matlab 编程环境;
2. 利用’imread’函数读入图像数据; 3. 利用’imshow’显示所读入的图像数据; 4. 将图像数据由’uint8’格式转换为’double’格式,并将各点数据乘以 (-1)x+y 以便FFT 变换后的结果中低频数据处于图像中央; 5. 用’fft2’函数对图像数据进行二维FFT 变换,得到频率域图像数据; 6. 计算频率域图像的幅值并进行对数变换,利用’imshow’显示频率域图 像; 7. 在频率图像上去除滤波半径以外的数据(置0); 8. 计算频率域图像的幅值并进行对数变换,利用’imshow’显示处理过的 频域图像数据; 9. 用’ifft2’函数对图像数据进行二维FFT 逆变换,并用’real’函数取其实部,得到处理过的空间域图像数据; 10. 将图像数据各点数据乘以(-1)x+y; 11. 利用’imshow’显示处理结果图像数据; 12. 利用’imwrite’函数保存图像处理结果数据。 图像去噪实验步骤: 1. 打开Matlab 编程环境; 2. 利用’imread’函数读入包含噪声的原始图像数据; 3. 利用’imshow’显示所读入的图像数据; 4. 以3X3 大小为处理掩模,编写代码实现中值滤波算法,并对原始噪声 图像进行滤波处理; 5. 利用’imshow’显示处理结果图像数据; 6. 利用’imwrite’函数保存图像处理结果数据。 即使不是按这些步骤来的也没关系,只要是那个功能,能实现就OK,谢谢大家 %%%%%%%%spatial frequency (SF) filtering by low pass filter%%%%%%%% % the SF filter is unselective to orientation (doughnut-shaped in the SF % domain). [FileName,PathName,FilterIndex] = uigetfile ; filename = fullfile(PathName, FileName) ; [X map] = imread(filename, fmt); % read image L = double(X); % transform to double %%%%%%%%%%%%% need to add (-1)x+y to L % calculate the number of points for FFT (power of 2) fftsize = 2 .^ ceil(log2(size(L))); % 2d fft Y = fft2(X, fftsize(1), fftsize (2));
文件一 % THIS PROGRAM IS FOR IMPLEMENTATION OF DISCRETE TIME PROCESS EXTENDED KALMAN FILTER % FOR GAUSSIAN AND LINEAR STOCHASTIC DIFFERENCE EQUATION. % By (R.C.R.C.R),SPLABS,MPL. % (17 JULY 2005). % Help by Aarthi Nadarajan is acknowledged. % (drawback of EKF is when nonlinearity is high, we can extend the % approximation taking additional terms in Taylor's series). clc; close all; clear all; Xint_v = [1; 0; 0; 0; 0]; wk = [1 0 0 0 0]; vk = [1 0 0 0 0]; for ii = 1:1:length(Xint_v) Ap(ii) = Xint_v(ii)*2; W(ii) = 0; H(ii) = ‐sin(Xint_v(ii)); V(ii) = 0; Wk(ii) = 0; end Uk = randn(1,200); Qu = cov(Uk); Vk = randn(1,200); Qv = cov(Vk); C = [1 0 0 0 0]; n = 100; [YY XX] = EKLMNFTR1(Ap,Xint_v,Uk,Qu,Vk,Qv,C,n,Wk,W,V); for it = 1:1:length(XX) MSE(it) = YY(it) ‐ XX(it); end tt = 1:1:length(XX); figure(1); subplot(211); plot(XX); title('ORIGINAL SIGNAL'); subplot(212); plot(YY); title('ESTIMATED SIGNAL'); figure(2); plot(tt,XX,tt,YY); title('Combined plot'); legend('original','estimated'); figure(3); plot(MSE.^2); title('Mean square error'); 子文件::function [YY,XX] = EKLMNFTR1(Ap,Xint_v,Uk,Qu,Vk,Qv,C,n,Wk,W,V); Ap(2,:) = 0; for ii = 1:1:length(Ap)‐1 Ap(ii+1,ii) = 1;
图像处理函数详解——strel 功能:用于膨胀腐蚀及开闭运算等操作的结构元素对象(本论坛随即对膨胀腐蚀等操作进行讲解)。 用法:SE=strel(shape,parameters) 创建由指定形状shape对应的结构元素。其中shape的种类有 arbitrary' 'pair' 'diamond' 'periodicline' 'disk' 'rectangle' 'line' 'square' 'octagon 参数parameters一般控制SE的大小。 例子: se1=strel('square',6) %创建6*6的正方形 se2=strel('line',10,45) %创建直线长度10,角度45 se3=strel('disk',15) %创建圆盘半径15 se4=strel('ball',15,5) %创建椭圆体,半径15,高度5
图像处理函数详解——roipoly 功能:用于选择图像中的多边形区域。 用法:BW=roipoly(I,c,r) BW=roipoly(I) BW=roipoly(x,y,I,xi,yi) [BW,xi,yi]=roipoly(...) [x,y,BW,xi,yi]=roipoly(...) BW=roipoly(I,c,r)表示用向量c、r指定多边形各点的X、Y坐标。BW选中的区域为1,其他部分的值为0. BW=roipoly(I)表示建立交互式的处理界面。 BW=roipoly(x,y,I,xi,yi)表示向量x和y建立非默认的坐标系,然后在指定的坐标系下选择由向量xi,yi指定的多边形区域。 例子:I=imread('eight.tif'); c=[222272300270221194]; r=[21217512112175]; BW=roipoly(I,c,r); imshow(I)
第一部分数字图像处理
实验一图像的点运算 实验1.1 直方图 一.实验目的 1.熟悉matlab图像处理工具箱及直方图函数的使用; 2.理解和掌握直方图原理和方法; 二.实验设备 1.PC机一台; 2.软件matlab。 三.程序设计 在matlab环境中,程序首先读取图像,然后调用直方图函数,设置相关参数,再输出处理后的图像。 I=imread('cameraman.tif');%读取图像 subplot(1,2,1),imshow(I) %输出图像 title('原始图像') %在原始图像中加标题 subplot(1,2,2),imhist(I) %输出原图直方图 title('原始图像直方图') %在原图直方图上加标题 四.实验步骤 1. 启动matlab 双击桌面matlab图标启动matlab环境; 2. 在matlab命令窗口中输入相应程序。书写程序时,首先读取图像,一般调用matlab自带的图像, 如:cameraman图像;再调用相应的直方图函数,设置参数;最后输出处理后的图像; 3.浏览源程序并理解含义; 4.运行,观察显示结果; 5.结束运行,退出; 五.实验结果 观察图像matlab环境下的直方图分布。 (a)原始图像 (b)原始图像直方图 六.实验报告要求 1、给出实验原理过程及实现代码; 2、输入一幅灰度图像,给出其灰度直方图结果,并进行灰度直方图分布原理分析。
实验1.2 灰度均衡 一.实验目的 1.熟悉matlab图像处理工具箱中灰度均衡函数的使用; 2.理解和掌握灰度均衡原理和实现方法; 二.实验设备 1.PC机一台; 2.软件matlab; 三.程序设计 在matlab环境中,程序首先读取图像,然后调用灰度均衡函数,设置相关参数,再输出处理后的图像。 I=imread('cameraman.tif');%读取图像 subplot(2,2,1),imshow(I) %输出图像 title('原始图像') %在原始图像中加标题 subplot(2,2,3),imhist(I) %输出原图直方图 title('原始图像直方图') %在原图直方图上加标题 a=histeq(I,256); %直方图均衡化,灰度级为256 subplot(2,2,2),imshow(a) %输出均衡化后图像 title('均衡化后图像') %在均衡化后图像中加标题 subplot(2,2,4),imhist(a) %输出均衡化后直方图 title('均衡化后图像直方图') %在均衡化后直方图上加标题 四.实验步骤 1. 启动matlab 双击桌面matlab图标启动matlab环境; 2. 在matlab命令窗口中输入相应程序。书写程序时,首先读取图像,一般调用matlab自带的图像, 如:cameraman图像;再调用相应的灰度均衡函数,设置参数;最后输出处理后的图像; 3.浏览源程序并理解含义; 4.运行,观察显示结果; 5.结束运行,退出; 五.实验结果 观察matlab环境下图像灰度均衡结果及直方图分布。 (a)原始图像 (b)均衡化后图像
江苏科技大学 数字图像处理本科生课程论文 论文题目:图像平滑方法综述与MATLAB实现完成时间:11月20日 所在专业:信息与计算科学
图像平滑方法综述与MATLAB实现 摘要:在图像的生成、传输或变换的过程中,由于多种因素的影响,总要造成图像质量的下降,这就需要进行图像增强。随着图像处理领域的迅速发展,图像平滑作为图像增强的重要环节,也逐渐受到人们的关注。图像平滑的目的为了消除噪声。图像平滑可以在空间域进行,也可以在频率域进行。空间域常用的方法有领域平均法、中值滤波和多图像平均法;在频率域,因为噪声频谱多在高频段,因此可以采用各种形式的低通滤波方法进行平滑处理。 关键词:图像平滑;消除噪声;领域平均法;中值滤波;低通滤波法……… 1 研究背景 总所周知,实际获得的图像在形成、传输接收和处理的过程中,不可避免地存在着外部干扰和内部干扰,如光电转换过程中敏感元件灵敏度的不均匀性、数字化过程中的量化噪声、传输过程中的误差以及人为因素等,均会使图像质量变差,需要进行图像的平滑处理。 图像平滑是一种实用的熟悉图像处理技术,一个较好的平滑处理方法应该既能消除图像噪声,又不使图像边缘轮廓和线条变模糊,这就是研究数字图形平滑处理要追求的目标。 2.主要理论概况 2.1 邻域平均法 邻域平均法就是对含噪声的原始图像的每一个像素点取一个邻域,计算中所有像素灰度级的平均值,作为邻域平均处理后的图像的像素值。即 式中, ),为邻域中像素的点数。
是预先设定的阈值,当某些点的灰度值与其邻域点灰度平均值之差不超过阈值式中, 时,仍保留这些点的灰度值。当某些点的灰度值与其邻点灰度的均值差别较大时,这些点必然是噪声,这时再取其邻域平均值作为这些点的灰度点。这样平滑后的图像比单纯的进行邻域平均后的图像要清晰一些,平滑效果仍然很好。 2.2 中值滤波 中值滤波是一种非线性处理技术,由于它在实际运算过程中并不需要知道图像的统计特性,所以比较方便。中值滤波最初是应用在一维信号处理技术中,后来被二维的图像处理技术所引用。在一定条件下,中值滤波可以克服线性滤波器所带来的图像细节模糊,而且对滤波除脉干扰及图像扫描噪声非常有效。但是对一些细节多,特别是点、线、尖顶较多的图像则不宜采用中值滤波的方法。中值滤波的目的是保护图像边缘的同时去除噪声。 2.2.1 中值滤波的主要原理 中值滤波实际上就是用一个含有奇数个像素的滑动窗口,将窗口正中点的灰度值用窗口内各点的中值代替。例如若窗口长度为5,窗口中像素的灰度值分别为80、90、200、110、120,则中值为110,于是原来窗口正中的200就由110代替。 设有一个一维序列,用窗口长度为m(m为奇数)的窗口对该序列进行中值 滤波,就是从序列中相继抽出m 个数其中为窗口中心值,,再将这m个点的值按其数值大小排列,取其序号为正中间的那个值作为滤波器的输出。用数学公式可表示为 对二维序列进行中值滤波时,滤波窗口也是二维的,只不过这种二维窗口可以有各种不同的形状,如线状、方形,圆形、十字形和圆环形等。二维数据的中值滤波可以表示为 A为窗口
卡尔曼滤波器及其简matlab仿真
卡尔曼滤波器及其简matlab仿真 一、卡尔曼滤波的起源 谈到信号的分析与处理,就离不开滤波两个字。通常,信号的频谱处于有限的频率范围内,而噪声的频谱则散布在很广的频率范围内,为了消除噪声,可以进行频域滤波。但在许多应用场合,需要直接进行时域滤波,从带噪声的信号中提取有用信号。虽然这样的过程其实也算是对信号的滤波,但其所依据的理论,即针对随机信号的估计理论,是自成体系的。人们对于随机信号干扰下的有用信号不能“确知”,只能“估计”。为了“估计”,要事先确定某种准则以评定估计的好坏程度。 1960年卡尔曼发表了用递归方法解决离散数据线性滤波问题的论文A New Approach to Linear Filtering and Prediction Problems (线性滤波与预测问题的新方法),在这篇文章里一种克服了维纳滤波缺点的新方法被提出来,这就是我们今天称之为卡尔曼滤波的方法。卡尔曼滤波应用广泛且功能强大,它可以估计信号的过去和当前状态甚至能估计将来的状态即使并不知道模型的确切性质。 其基本思想是以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。 对于解决很大部分的问题,它是最优,效率最高甚至是最有用的。它的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 卡尔曼滤波不要求保存过去的测量数据,当新的数据到来时,根据新的数据和前一时刻的储值的估计,借助于系统本身的状态转移方程,按照一套递推公式,即可算出新的估值。卡尔曼递推算法大大减少了滤波装置的存储量和计算量,并且突破了平稳随机过程的限制,使卡尔曼滤波器适用于对时变信号的实时处理。
程序实例 1旋转: x=imread('d:\MATLAB7\work\flower.jpg'); y=imrotate(x,200,'bilinear','crop'); subplot(1,2,1); imshow(x); subplot(1,2,2); imshow(y) 2.图像的rgb clear [x,map]=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shh1.jpg');y=x(90:95,90:95);imshow(y)R=x(90:95,90:95,1);G=x(90:95,90:95,2);B=x(90:95,90:95,3);R,G,B 3.加法运算clear I=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shh3.jpg');J=imnoise(I,'gaussian',0,0.02);%向图片加入高斯噪声subplot(1,2,1),imshow(I);%显示图片subplot(1,2,2),imshow(J);K=zeros(242,308);%产生全零的矩阵,大小与图片的大小一样for i=1:100%循环100加入噪声J=imnoise(I,'gaussian',0,0.02);J1=im2double(J);K=K+J1;end K=K/100; figure,imshow(K);save
4.减法 clear I=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao.jpg'); J=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao1.jpg'); K=imsubtract(I,J);%实现两幅图相减 K1=255-K;%将图片求反显示 figure;imshow(I); title('有噪声的图'); figure;imshow(J); title('原图'); figure;imshow(K1); title('提取的噪声'); save 5.图像的乘法 H=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao.jpg'); I=immultiply(H,1.2);将此图片乘以1.2 J=immultiply(H,2); subplot(1,3,1),imshow(H); title('原图'); subplot(1,3,2),imshow(I); title('·放大1.2'); subplot(1,3,3),imshow(J); title('放大2倍'); 6除法运算 moon=imread('moon.tif'); I=double(moon); J=I*0.43+90; K=I*0.1+90; L=I*0.01+90; moon2=uint8(J); moon3=uint8(K); moon4=uint8(L); J=imdivide(moon,moon2); K=imdivide(moon,moon3); L=imdivide(moon,moon4); subplot(2,2,1),imshow(moon); subplot(2,2,2),imshow(J,[]); subplot(2,2,3),imshow(K,[]); subplot(2,2,4),imshow(L,[]);
基于MATLAB的运动模糊图像处理 提醒: 我参考了文献里的书目和网上的一些代码而完成的,所以误差会比较大,目前对于从网上下载的模糊图片的处理效果很不好,这是我第一次上传自己完成的实验的文档,希望能帮到一些人吧。 研究目的 在交通系统、刑事取证中图像的关键信息至关重要,但是在交通、公安、银行、医学、工业监视、军事侦察和日常生活中常常由于摄像设备的光学系统的失真、调焦不准或相对运动等造成图像的模糊,使得信息的提取变得困难。但是相对于散焦模糊,运动模糊图像的复原在日常生活中更为普遍,比如高速运动的违规车辆的车牌辨识,快速运动的人群中识别出嫌疑人、公安刑事影像资料中提取证明或进行技术鉴定等等,这些日常生活中的重要应用都需要通过运动模糊图像复原技术来尽可能地去除失真,恢复图像的原来面目。因此对于运动模糊图像的复原技术研究更具有重要的现实意义。 图像复原原理 本文探讨了在无噪声的情况下任意方向的匀速直线运动模糊图像的复原问题,并在此基础上讨论了复原过程中对点扩散函数(PSF)的参数估计从而依据自动鉴别出的模糊方向和长度构造出最为近似的点扩散函数,构造相应的复原模型,实现运动模糊图像的复原;在模糊图像自动复原的基础上,根据恢复效果图的纹理特征和自动鉴别出的模糊长度和角度,人工调整模糊方向和长度参数,使得复原效果达到最佳。 实验过程 模糊方向的估计: 对图1(a)所示的原始图像‘车牌’图像做方向θ=30?,长度L=20像素的匀速直线运动模糊,得到退化图像如图1(b)
1(a) 1(b) j=imread('车牌1.jpg'); figure(1),imshow(j); title('原图像'); len=20; theta=30; psf=fspecial('motion',len,theta); j1=imfilter(j,psf,'circular','conv'); figure,imshow(j1); title('PSF 模糊图像'); 图1(c)和1(d)分别为原图像和模糊图像的二次傅里叶变化
《图像处理中的数学方法》实验报告 学生姓名:赵芳舟 教师姓名:曾理 学院:数学与统计学院 专业:信息与计算科学 学号: 联系方式: 梯度和拉普拉斯算子在图像边缘检测中的应用
一、数学方法 边缘检测最通用的方法是检测灰度值的不连续性,这种不连续性用一阶和二阶导数来检测。 1.(1)一阶导数:一阶导数即为梯度,对于平面上的图像来说,我们只需用到二维函数 的梯度,即:,该向量的幅值: ,为简化计算,省略上式平方根,得到近似值;或通过取绝对值来近似,得到:。 (2)二阶导数:二阶导数通常用拉普拉斯算子来计算,由二阶微分构成: 2.边缘检测的基本思想: (1)寻找灰度的一阶导数的幅度大于某个指定阈值的位置; (2)寻找灰度的二阶导数有零交叉的位置。 3.几种方法简介 (1)Sobel边缘检测器:以差分来代替一阶导数。Sobel边缘检测器使用一个3×3邻域的行和列之间的离散差来计算梯度,其中,每行或每列的中心像素用2来 加权,以提供平滑效果。 -1-21 000 121 -101 -202 -101
(2)Prewitt边缘检测器:使用下图所示模板来数字化地近似一阶导数。与Sobel检测器相比,计算上简单一些,但产生的结果中噪声可能会稍微大一些。 -1-1-1 000 111 -101 -101 -101 (3)Roberts边缘检测器:使用下图所示模板来数字化地将一阶导数近似为相邻像素之间的差,它与前述检测器相比功能有限(非对称,且不能检测多种45°倍数的边缘)。 -10 01 0-1 10 (4)Laplace边缘检测器:二维函数的拉普拉斯是一个二阶的微分定义: 010 1-41 010
卡尔曼滤波器及其简matlab仿真 一、卡尔曼滤波的起源 谈到信号的分析与处理,就离不开滤波两个字。通常,信号的频谱处于有限的频率范围内,而噪声的频谱则散布在很广的频率范围内,为了消除噪声,可以进行频域滤波。但在许多应用场合,需要直接进行时域滤波,从带噪声的信号中提取有用信号。虽然这样的过程其实也算是对信号的滤波,但其所依据的理论,即针对随机信号的估计理论,是自成体系的。人们对于随机信号干扰下的有用信号不能“确知”,只能“估计”。为了“估计”,要事先确定某种准则以评定估计的好坏程度。 1960年卡尔曼发表了用递归方法解决离散数据线性滤波问题的论文A New Approach to Linear Filtering and Prediction Problems(线性滤波与预测问题的新方法),在这篇文章里一种克服了维纳滤波缺点的新方法被提出来,这就是我们今天称之为卡尔曼滤波的方法。卡尔曼滤波应用广泛且功能强大,它可以估计信号的过去和当前状态甚至能估计将来的状态即使并不知道模型的确切性质。 其基本思想是以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。 对于解决很大部分的问题,它是最优,效率最高甚至是最有用的。它的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 卡尔曼滤波不要求保存过去的测量数据,当新的数据到来时,根据新的数据和前一时刻的储值的估计,借助于系统本身的状态转移方程,按照一套递推公式,即可算出新的估值。卡尔曼递推算法大大减少了滤波装置的存储量和计算量,并且突破了平稳随机过程的限制,使卡尔曼滤波器适用于对时变信号的实时处理。 二、卡尔曼滤波的原理