
系统仿真课程设计报告 题目:一阶倒立摆系统的双闭环模糊控制方案专业、班级: 学生姓名: 学号: 指导教师: 分数: 2012 年 6 月9 日
目录 摘要: (2) 一、引言 (2) 二、设计目的 (3) 三、设计要求 (3) 四、设计原理 (3) 五、设计步骤 (3) 1、单级倒立摆系统的构成........................ 错误!未定义书签。 2、单级倒立摆的数学模型 (4) 3、模糊控制器的设计 (6) 3.1单阶倒立摆模糊控制的基本思路 (6) 3.2隶属函数的定义 (6) 3.3模糊控制器规则 (7) 3.4解模糊 (8) 4、仿真实验 (8) 4.1MATLAB模糊逻辑工具箱 (8) 4.2系统数字仿真模型的建立 (11) 5、基于MATLAB的数字仿真结果 (12) 六、结论 (13) 七、感想和建议 (13) 八、致谢 (14) 九、参考文献 (15)
摘要:通过对单阶倒立摆的双闭环的控制数学模型的分析,采用模糊控制理论对倒立摆的控制系统进行计算机仿真。其中,内环控制倒立摆的角度,外环控制倒立摆的位置。在Matlab环境下的仿真步骤包括:定义隶属函数及模糊控制规则集,解模糊。结果表明,摆杆角度和小车位置的控制过程均具有良好的动态性能和稳定性能。 关键词:倒立摆;模糊逻辑控制;计算机仿真;MATLAB Abstract:based on the ChanJie inverted pendulum double closed loop control mathematical model analysis, the fuzzy control theory of the inverted pendulum control system by computer simulation. Among them, the inner loop control the point of view of the inverted pendulum, outside loop control the position of the inverted pendulum. In the Matlab environment simulation steps include: definition membership function and fuzzy control rule sets, solution is fuzzy. The results show that, swinging rod Angle and the car position control process are good dynamic performance and stable performance. Keywords: inverted pendulum; Fuzzy logic control; The computer simulation; Matlab 一、引言 在人类自然科学的发展历史上,人们总是以追求事物的精确描述为目的来进行研究,并取得了大量的成果。随着科学技术的进步,在社会生产和生活中存在的大量的不确定性开始引起人们的注意。有关模糊不确定性的研究直到1965年,美国的L.A.Zadeh教授首次提出模糊集合的概念之后得到广泛开展。 “模糊”是与“精确”相对而言的概念,模糊性普遍存在于人类的思维和语言交流中,是一种不确定性的表现。随机性则是客观存在的另一类不确定性,两者虽然都是不确定性,单存在本质上的区别。模糊性主要是人对概念外延的主观理解上的不确定性,而随机性则主要反映客观上的自然的不确定性,即对事件或行为的发生与否的不确定性。 一阶直线倒立摆系统是一个典型的“快速、多变量、非线性、自不稳定系统”,将模糊控制方法应用于一阶倒立摆系统的控制问题,能够发挥模糊控制在非线性系统控制、复杂对象系统控制方面的优势,简化设计,提高控制系统的鲁棒性。
BI YE SHE JI (20 届) 基于模糊控制的一级倒立摆控制系统设计 所在学院 专业班级自动化 学生姓名学号 指导教师职称 完成日期年月 II
摘要 倒立摆系统是研究控制理论的典型实验装置,具有价格低廉,结构简单,参数易于调整等优点。但是倒立摆同时也是一个典型的快速,非线性,多变量,本质不稳定系统,对于其稳定性的控制绝非易事。也正因为如此,对于倒立摆系统控制方法的研究和开发才具有重要和深远的意义。目前适用此系统的控制理论包括变结构控制,非线性控制,目标定位控制,智能控制等。 本文根据一级直线倒立摆系统,建立了数学模型,依据模糊控制的相关规则设计了模糊控制规则,并从位移和角度观点出发设计了双模糊控制器,经过仿真调试对重要参数进行不断的调试和优化,最终实现了“摆杆不倒,小车稳住”的总体目标。 对于实物实验系统,本文对构成倒立摆运动控制系统的电机,编码器和运动控制模块进行了比较选择,选择了交流伺服电机,增量式光电编码器和基于DSP技术的运动控制器作为主要的硬件组合,该运动控制器具有良好的性能,可以保证控制的精度。 关键词:倒立摆,模糊控制,系统设计,仿真,稳定 II
Abstract Inverted pendulum system is the study of the typical experiment device control theory, which is inexpensive, simple structure and easy to adjust the parameters. But it is also a system that typical rapid, nonlinear, many variables, and its essence is not stable, for its stability control is not going to be easy. Also because of this inverted pendulum system control method of the research and development are important and profound significance. At present the system for the control theory including variable structure control, nonlinear control, the goal positioning control, intelligent control, etc. According to the level of linear inverted pendulum system, this paper established the mathematical model, based on the fuzzy control rules we designed its fuzzy control rules, and from the view point of view design displacement and the dual fuzzy controller, through the simulation test of continuing the important parameters of debugging and optimization, and finally achieved "swinging rod, the car is not steady overall goal. For physical experiment system, this paper constitutes inverted pendulum motion control system of motor, encoder and motion control module are compared choice. Choose the ac servo motor, the solid-axes photoelectric encoder and the motion controller based on DSP technology as the main combination of hardware, this controller has good performance, and can ensure the precision of the control. Key words: inverted pendulum,Fuzzy control,System design ,The simulation,stability II
智能控制理论及应用课程设计报告 题目:基于matlab的倒立摆模糊控制 院系:西北民族大学电气工程学院
基于MATLAB的倒立摆模糊控制 摘要:倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。本文主要针对较为简单的单级倒立摆控制系统而进行的设计分析。通过建立微分方程模型,求出相关参数,设计出对应的模糊控制器,并运用MATLAB软件进行系统模型的软件仿真,从而达到预定控制效果。目前,一级倒立摆的研究成果应用于火箭发射推进器和控制卫星的飞行状态等航空航天领域。关键词:单级倒立摆;微分方程;模糊控制;MATLAB仿真 1背景分析 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的
研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。 正是由于倒立摆系统的特殊性,许多不同领域的专家学者在检验新提出理论的正确性和实际可行性时,都将倒立摆系统作为实验测试平台。再将经过测试后的控制理论和控制方法应用到更为广泛的领域中去。现代控制理论已经在工业生产过程、军事科学、航空航天等许多方面都取得了成功的应用。例如极小值原理可以用来解决某些最优控制问题;利用卡尔曼滤波器可以对具有有色噪声的系统进行状态估计;预测控制理论可以对大滞后过程进行有效的控制。但是它们都有一个基本的要求:需要建立被控对象的精确数学模型。 随着科学技术的迅猛发展,各个领域对自动控制控制精度、响应速度、系统稳定性与适应能力的要求越来越高,所研究的系统也日益复杂多变。然而由于一系列的原因,诸如被控对象或过程的非线性、时变性、多参数间的强烈耦合、较大的随机干扰、过程机理错综复杂、各种不确定性以及现场测量手段不完善等,难以建立被控对象的精确模型。虽然常规自适应控制技术可以解决一些问题,但范围是有限的。对于像二级倒立摆这样的非线性、多参数、强耦合的被控对象,使用
1.1模糊控制理的发展历史、研究现状及展望 1.1.1模糊控制理论的发展历史 模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。在人类自然科学的发展历史上,人们总是以追求事物的精确性描述为U的来进行研究,并取得了大量的成果。随着科学技术的进步,在社会生产和生活中存在的大量的不确定性开始引起人们的注意。1965年,美国的L.A.Zadeh教授创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。1974年,英国的E.H.Mamdani首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。这一开拓性的工作标志着模糊控制论的诞生。 模糊控制实质上是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既具有系统化的理论,乂有着大量实际应用背景。模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用。近20多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而乂硕果累累的分支。其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。U前,模糊控制技术日趋成熟和完善。各种模糊产品充满了日本、西欧和美国市场,如模糊洗衣机、模糊吸尘器和模糊摄像机等等,模糊技术儿乎变得无所不能,各国都争先开发模糊新技术和新产品。多年来一直未解决的稳定性分析问题正在逐步解决。模糊芯片也已研制成功且功能不断加强,成本不断下降。直接采用模糊芯片开发产品己成为趋势。模糊开发软件包也充满市场。模糊控制技术除了在硬件、软件上继续发展外,将在自适应模糊控制、混合模糊控制以及神经模糊控制上取得较大发展。随着其它学科新理论、新技术的建立和发展,模糊理论的应用更加广泛。模糊理论结合其它新技术和人工神经网络和遗传基因形成交叉学科神经网络模糊技术(Neuron Fuzzy Technique)和遗传基因模糊技术(Genetic Fuzzy Technique),用于解决单一技术不能解决的问题。模糊理论在其它学科技术的推动下,正朝着更加广泛的方向发展。 1.1.2模糊控制的研究现状 1.1. 2. 1 Fuzzy-PID 复合控制
2011级自动化1班 杨辉云 P111813841 一级倒立摆的模糊控制 一.倒立摆的模型搭建 1. 单级倒立摆系统的数学模型 对于单级倒立摆,如果忽略了空气阻力和各种摩擦阻力之后,可将直线一级倒立摆系统抽象成沿着光滑导轨运动的小车和通过轴承链接的均质摆杆组成,如图所示,其中小车的质量M=1.40kg ,摆杆质量m=0.08kg ,摆杆质心到转动轴心距离L=0,.2m ,摆杆与垂直向下方向的夹角为,小车华东摩擦系数 f c =0.1。 摆杆 θ 传送带 导轨 直线单级倒立摆 2. 倒立摆控制系统数学模型的建立方法利用PID 控制和拉格朗日方程两种建模。 一级倒立摆系统的拉格朗日方程应为 L (q ,。 .q )=V (q ,。 q )—G (q ,。 q ) (1) 式中:L 是拉格朗日算子,V 是系统功能;G 系统势能。 dt d x ??L — x ??L + x ??D = fi (2)
式中:D 是系统耗散能, f c 为系统的第i 个广义坐标上的外力。 一级倒立摆系统的总动能为: V=θθcos x ml ml 3 2)(212 22。。。+++x m M (3) 一级倒立摆系统的势能为: G=θcos mgl θ (4) 一级倒立摆系统的耗散能为: D= 2 2 1 。x f c (5) 一级倒立摆系统的拉格朗日方程为: 0=??+??-??θ θθD L L dt d (6) F X D X L X L dt d =??+??-?? (7) 将(1)到(5)式带入(6)式得到如下: 0sin sin sin cos m 3 422=-+。。。。。。 ——θθθθθθθθmgl x ml x ml x l ml (8) (M+m )F x ml ml x f c =+ +θθθθsin cos 2。 。 — (9) 一级倒立摆系统有四个变量:。 。,,, θθx x 根据(7)式中的方程写出系统的状态方程,并在平衡点进行线性化处理,得 到系统的状态空间模型如下: =。X ? ?????0 000 0189.000748 .01-- 579.20 386.00 ??????0100+x ? ???? ? ??? ???-8173.007467 .00
一级倒立摆的模糊控制 一、 立题背景 倒立摆( Inverted Pendulum)是处于倒置不稳定状态、通过人为控制使其处于动态平衡的一种摆。它是一个复杂的快速、非线性、多变量、强耦合的非最小相位系统,是重心在上、支点在下控制问题的抽象。 倒立摆的控制一直是控制理论及应用的典型课题倒立摆系统通常用来检验控制策略的效果,是控制理论研究中较为理想的实验装置。又因其与火箭飞行器及单足机器人有很大的相似之处,引起国内外学者的广泛关注。控制过程中的许多关键问题,如镇定问题、非线性问题、鲁棒性问题、随动问题以及跟踪问题等都可以以倒立摆为例加以研究。 本文围绕一级倒立摆系统,采用模糊控制理论研究了倒立摆的控制系统仿真问题。仿真 的成功证明了本文设计的模糊控制器有很好的稳定性。 二、 倒立摆的数学模型 质量为m 的小球固结于长度为L 的细杆(可忽略杆的质量)上,细杆又和质量为M 的小车铰接相连。由经验知:通过控制施加在小车上的力F (包括大小和方向)能够使细杆处于θ=0的稳定倒立状态。在忽略其他零件的质量以及各种摩擦和阻尼的条件下,推导小车倒立摆系统的数学模型。倒立摆模型如图2-1所示。 图 2-2 单机倒立摆模型图 小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡。电机编码器和角编码器向运动卡反馈小车和摆杆位置(线位移和角位移)。导轨截面成H 型,小车在轨道上可以自由滑动,其在轨道上的有效运行长度为1米。轨道两端装有电气限位开关,以防止因意外失控而撞坏机构。 以摆角θ、角速度θ’、小车位移x 、加速度x ’为系统状态变量,Y 为输出,F 为输入 以摆角θ、角速度θ’、小车位移x 、加速度x ’为系统状态变量,Y 为输出,F 为输入。 即X=????????????4321x x x x =?? ? ??? ??????x'x 'θθ Y=??????x θ=??? ???31x x
单级倒立摆系统的分析与设计 小组成员:武锦张东瀛杨姣 李邦志胡友辉 一.倒立摆系统简介 倒立摆系统是一个典型的高阶次、多变量、不稳定和强耦合的非线性系统。由于它的行为与火箭飞行以及两足机器人行走有很大的相似性,因而对其研究具有重大的理论和实践意义。由于倒立摆系统本身所具有的上述特点,使它成为人们深入学习、研究和证实各种控制理论有效性的实验系统。 单级倒立摆系统(Simple Inverted Pendulum System)是一种广泛应用的物理模型,其结构和飞机着陆、火箭飞行及机器人的关节运动等有很多相似之处,因而对倒立摆系统平衡的控制方法在航空及机器人等领域有着广泛的用途,倒立摆控制理论产生的方法和技术将在半导体及精密仪器加工、机器入技术、导弹拦截控制系统、航空器对接控制技术等方面具有广阔的开发利用前景。 倒立摆仿真或实物控制实验是控制领域中用来检验某种控制理论或方法的典型方案。最初研究开始于二十世纪50年代,单级倒立摆可以看作是一个火箭模型,相比之下二阶倒立摆就复杂得多。1972年,Sturgen等采用线性模拟电路实现了对二级倒立摆的控制。目前,一级倒立摆控制的仿真或实物系统已广泛用于教学。 二.系统建模 1.单级倒立摆系统的物理模型 图1:单级倒立摆系统的物理模型
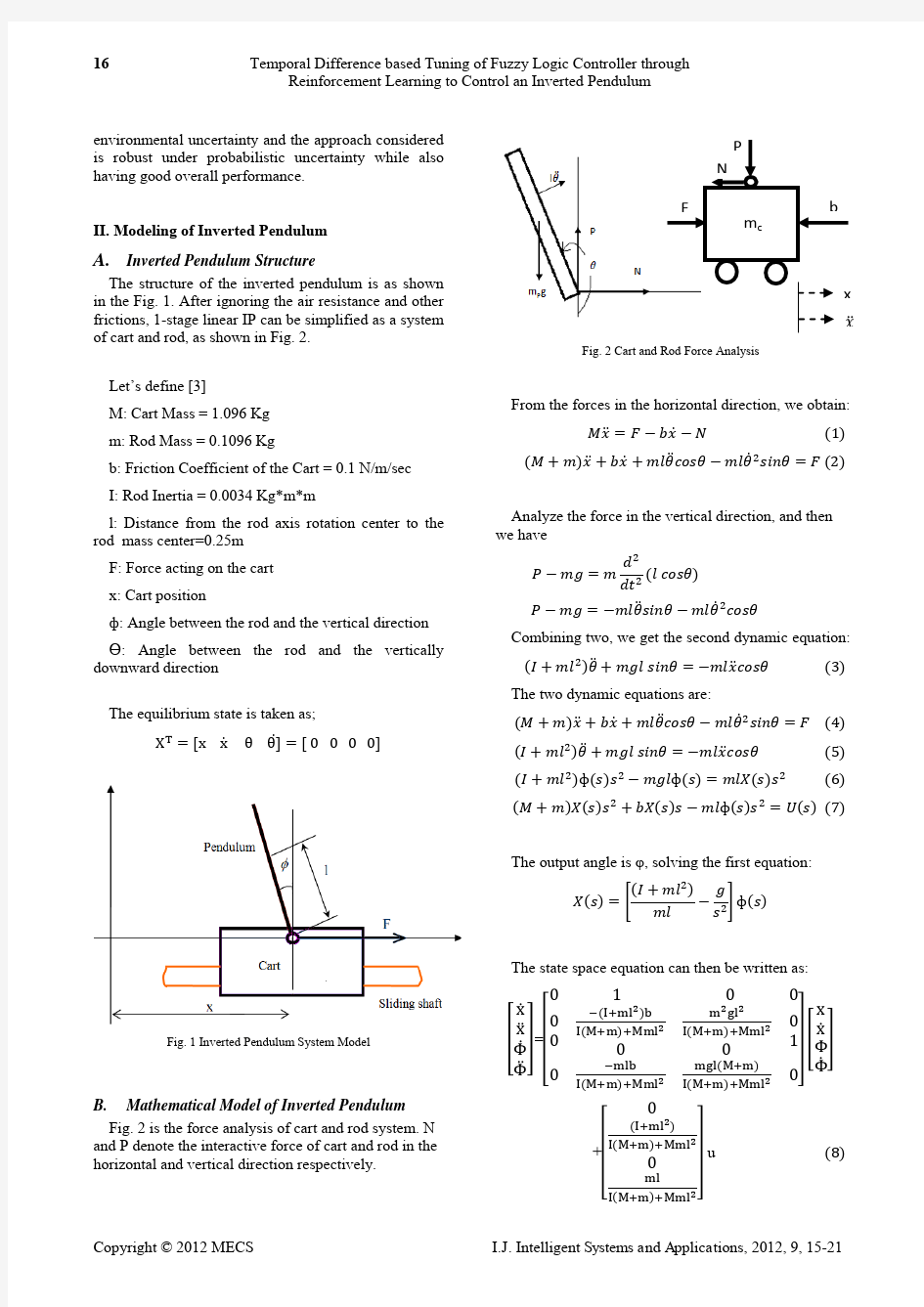
单级倒立摆系统是如下的物理模型:在惯性参考系下的光滑水平平面上,放置一个可以在平行于纸面方向左右自由移动的小车(cart ),一根刚性的摆杆(pendulum leg )通过其末端的一个不计摩擦的固定连接点(flex Joint )与小车相连构成一个倒立摆。倒立摆和小车共同构成了单级倒立摆系统。倒立摆可以在平行于纸面180°的范围内自由摆动。倒立摆控制系统的目的是使倒立摆在外力的摄动下摆杆仍然保持竖直向上状态。在小车静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆受到微小的摄动时就会发生不可逆转的破坏而使倒立摆无法复位,这时必须使小车在平行于纸面的方向通过位移产生相应的加速度。依照惯性参考系下的牛顿力学原理,作用力与物体位移对时间的二阶导数存在线性关系,单级倒立摆系统是一个非线性系统。 各个参数的物理意义为: M — 小车的质量 m — 倒立摆的质量 F — 作用到小车上的水平驱动力 L — 倒立摆的长度 x — 小车的位置 θ— 某一时刻摆角 整个倒立摆系统就受到重力、驱动力和摩擦阻力的三个外力的共同作用。这里,驱动力F 是由连接小车的传动装置提供,控制倒立摆的稳定实际上就是依靠控制驱动力F 使小车在水平面上做与倒立摆运动相关的特定运动。为了简化模型以利于仿真,假设小车与导轨以及摆杆与小车铰链之间的摩擦均为0。 2.单级倒立摆系统的数学模型 令小车的水平位移为x ,运动速度为v ,加速度a 。 小车的动能为212kc E Mx =,选择特定的参考平面使得小车的势能为0。 摆杆的长度为L ,某时刻摆角为θ,在摆杆上与固定连接点距离为q (0 一级直线倒立摆系统模糊控制器设计 实验指导书 目录 1 实验要求................................................................................. . (3) 1.1 实验准备................................................................................. . (3) 1.2 评分规则................................................................................. . (3) 1.3 实验报告容................................................................................. .. (3) 1.4 安全注意事项................................................................................. .. (3) 2 倒立摆实验平台介绍................................................................................. .. (4) 2.1 硬件组成................................................................................. . (4) 2.2 软件结构................................................................................. . (4) 3 倒立摆数学建模(预习 容) .............................................................................. (6) 4 模糊控制实验................................................................................. (8) 4.1 模糊控制器设计(预习容)............................................................................... (8) 4.2 模糊控制器仿真................................................................................. (12) 4.3 模糊控制器实时控制实验................................................................................. .. (12) 5 附录:控制理论中常用的MATLAB 函 单级倒立摆控制系统设计及simulink仿真 摘要:倒立摆系统是一个典型的多变量、非线性、强藕合和快速运动的自然不稳定系统。因此倒立摆在研究双足机器人直立行走、火箭发射过程的姿态调整和直升机飞行控制领域中有重要的现实意义,相关的科研成果己经应用到航天科技和机器人学等诸多领域。单级倒立摆系统是一种广泛应用的物理模型。控制单级倒立摆载体的运动是保证倒立摆稳定性的关键因素。为了避免常用的物理反馈分析方法和运动轨迹摄像制导控制方法的某些缺点,本文从力学的角度提出对倒立摆的运动进行纯角度制导分析,完成了对倒立摆载体的角度制导运动微分方程的数学建模,设计了该模型的模糊控制系统,并利用Matlab\simulink软件工具对倒立摆的运动进行了计算机仿真。实验表明,这种模糊控制配合代数解析方法的运算速度和计算机仿真的效果均较物理反馈制导控制方法有了一定的提高。该方法可以有效地改善单级倒立摆控制系统的性能。本论文的主要工作是研究了直线一级倒立摆系统的模糊控制问题,用Matlab和Simulink对一级倒立摆模糊控制系统进行了仿真,验证了设计的可行性。本文论述了一级倒立摆数学建模方法,推导出他们的微分方程,以及线性化后的状态方程。讨论了单级倒立摆系统的模糊控制方法和操作步骤。用Simulink实现了单级倒立摆模糊控制仿真系统,分别给出一级倒立摆系统控制量的响应曲线。通过仿真说明控制器的有效性和实现性。关键词:单级倒立摆;仿真;模糊控制;运动;建模;Simulink Design of single stage inverted pendulum control system and Simulink simulation Abstract: inverted pendulum system is unstable system with a typical multi variable, nonlinear, strong coupled and fast motion. So the research on the attitude adjustment of the double foot robot and the attitude adjustment of the rocket launching process and the helicopter flight control field have practical,significance. The related scientific research achievements have been applied to many fields such as aerospace science and robotics. Single inverted pendulum system is a widely used physical model. Controlling the movement of the single inverted pendulum is the key factor to guarantee the stability of the inverted pendulum. In order to avoid some shortings of mon physical feedback analysis method and motion trajectory camera guidance control method, this paper presents a pure angle guidance analysis on the motion of the inverted pendulum, and designs the TAIYUAN UNIVERSITY OF SCIENCE & TECHNOLOGY 题目: 院(系): 专业: 学生姓名: 学号: 模糊控制在倒立摆中的仿真应用 1、倒立摆系统 简介 倒立摆有许多类型,例如图1-1的a和b所示的分别是轮轨式一级倒立摆系统和二级倒立摆系统的模型。倒立摆是一个典型的快速、多变量、非线性、本质不稳定系统,它对倒置系统的研究在理论上和方法论上具有深远的意义。对倒立摆的研究可归结为对非线性多变量本质不稳定系统的研究,其控制方法和思路在处理一般工业过程中也有广泛的用途。近些年来国内外不少专家学者对一级、二级、三级、甚至四级等倒立摆进行了大量的研究,人们试图寻找不同的控制方法实现对倒立摆的控制,以便检查或说明该方法的严重非线性和本质不稳定系统的控制能力。2002年8月11日,我国的李洪兴教授在国际上首次成功实现了四级倒立摆实物控制,也标志着我国学者采用自己提出的控制理论完成的一项具有原创性的世界领先水平的重大科研成果。 图1-1 倒立摆模型 (a)一级倒立摆模型(b)二级倒立摆模型 倒立摆系统可以简单地描述为小车自由地在限定的轨道上左右移动。小车上的倒立摆一端用铰链安装在小车顶部,另一端可以在小车轨道所在的垂直平面内自由转动,通过电机和皮带传动使小车运动,让倒立摆保持平衡并保持小车不和轨道两端相撞。在此基础上在摆杆的另一端铰链其它摆杆,可以组成二级、三级倒立摆系统。该系统是一个多用途的综合性试验装置,它和火箭的飞行及步行机器人的关节运动有许多相似之处,其原理可以用于控制火箭稳定发射、机器人控制等诸多领域。 倒立摆系统控制原理 单级倒立摆系统的硬件包括下面几个部分:计算机、运动控制卡、伺服系统、倒立摆和测量元件,由它们组成的一个闭环系统,如图1-2所示,就是单级倒立摆系统的硬件结构图。 图1-2 单级倒立摆硬件结构图 通过角度传感器可以测量摆杆的角度,通过位移传感器可以得到小车的位置,然后反馈给运动控制卡,运动控制卡与计算机双向通信。计算机获得实时数据,确定控制策略,发送到运动控制卡,运动控制卡执行计算机确定的控制策略,产生相应的控制量,由伺服电机转动来带动小车在水平轨道往复的运动,使摆杆保持倒立。 倒立摆系统状态方程 θ f 图1-3 单级倒立摆模型图 θ为杆与垂线的夹角,f为作用力,杆的质量m=,杆和小车的总重量m=,半杆长l=,重力加速度g=s2,采样周期T=.倒立摆的数学模型为: 单级倒立摆稳定控制实验 一.实验目的 1.了解单级倒立摆的原理与数学模型的建立; 2.掌握LQR控制器的设计方法; 3.掌握基于LQR控制器的单级倒立摆稳定控制系统的仿真方法。 二.实验内容 图1 一级倒立摆原理图 一级倒立摆系统的原理框图如上所示。系统包括计算机、运动控制卡、伺服机构、倒立摆本体和光电码盘几大部分,组成了一个闭环系统。光电码盘1将连杆的角度、角速度信号反馈给伺服驱动器和运动控制卡,摆杆的角度、角速度信号由光电码盘2反馈回控制卡。计算机从运动控制卡中读取实时数据,确定控制决策,并由运动控制卡来实现该控制决策,产生相应的控制量,驱动电机转动,带动连杆运动,保持摆杆的平衡。 在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图2所示。 图2 直线一级倒立摆系 统 其中: M 小车质量 m 摆杆质量 b 小车摩擦系数 l 摆杆转动轴心到杆质心的长度 I 摆杆惯量 F 加在小车上的力 x 小车位置 φ 摆杆与垂直向上方向的夹角 θ 摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下) 下图是系统中小车和摆杆的受力分析图。其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。 注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向。 图3 (a )小车隔离受力图; (b ) 摆杆隔离受力图 分析小车水平方向所受的合力,可以得到以下方程: Mx F bx N =--&&& (1) 由摆杆水平方向的受力进行分析可以得到下面等式: ()2 2sin d N m x l dt θ=+ (2) 即:2cos sin N mx ml ml θθθθ=+-&&&&& 一级直线倒立摆系统 令狐采学 模糊控制器设计 实验指导书 目录 1 实验要求....................................................................................................................... .. (3) 1.1 实验准备....................................................................................................................... .. (3) 1.2 评分规则....................................................................................................................... .. (3) 1.3 实验报告内容....................................................................................................................... (3) 1.4安全注意事项....................................................................................................................... (3) 单级倒立摆系统中模糊控制理论的应用 1.引言 倒立摆系统是研究控制理论的一种典型实验平台,其具有成本低廉,结构简单,物 理参数和结构易于调整等优点,是一个高阶次、极不稳定、多变量、非线性和强耦 合的不稳定系统。在对倒立摆系统的控制过程中,它能有效地反映诸如可镇定性、随动性、鲁棒性以及跟踪等许多控制中关键性的问题,是检验各种控制理论的理想模型。迄今人们已经利用经典控制理论、现代控制理论以及各种智能控制理论实现了对多种倒立摆系统的稳定性的控制。同时倒立摆系统的动态过程与人类的行走姿态类似,平衡过程与火箭的发射姿态调整类似,因此倒立摆的研究在实现双足机器人直立行走、 火箭发射过程的姿态调整以及直升机飞行控制领域中都有着重要的现实意义,有关的科研成果已经应用到航天科技和机器人学等诸多领域当中。 1.1倒立摆简介 倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆 杆之间属于自由连接(即无电动机或其他驱动设备)。现在由中国的师大学洪兴教授领导的“模糊系统与模糊信息研究中心”暨复杂系统智能控制实验室采用变论域自适应模糊控制成功的实现了对四级倒立摆的控制。使我国称为了世界上第一个成功完成四级倒立摆实验的国家。按其形式分,倒立摆还分为,悬挂式倒立摆、平行倒立摆、 环形倒立摆、平面倒立摆。按控制电机数量,又可分为单电机倒立摆和多级电机倒立摆等等。图 1-1 为集中倒立摆系统的,实物照片。 图 1-1各类倒立摆系统照片 本文所采用的倒立摆模型,直线单极倒立摆。 1.2倒立摆控制方法简介 对倒立摆系统这样一个典型的非线性、强耦合、极不稳定的复杂的被控对象进行 研究,无论在理论上还是在方法上都具有其重要的意义,各种控制理论,控制方法都可以在这里得到充分的实践,并且可以促成各种不同方法之间的有机结合。当前,倒立摆的控制方法大致可以分为线性控制、预测控制和智能控制三大类。下面本文将对现阶段应用较为广的几种控制方法进行简要介绍。 (1)常规 PID 控制:该方法是最早发展起来的一种控制方法,由于其算法简单、 鲁棒性好、速度快、可靠性高等优点,至今仍广泛应用于工业过程控制中 [1] 。这种方法方法虽然可以用来实现对倒立摆系统的控制但由于其线性的本质,对于一个非线 性、绝对不稳定的系统是不能达到满意的控制效果的,振荡会比较厉害。若结合其它控制算法一起使用可发挥出取长补短的作用。 (2)状态反馈控制:状态反馈的极点配置法便是众多倒立摆控制方法中的一种最 基本的策略。极点配置法就是通过设计状态反馈控制器,然后将多变量系统的闭环系统极点配置在期望的位置之上,从而使系统满足实际应用当中所要求的瞬态和稳态的 性能指标[2]。 (3)线性二次型 (LQR):这种系统的状态方程是线性的,指标函数是状态变量和控 一阶直线倒立摆系统 姓名: 班级: 学号: 目录 摘要 (3) 第一部分单阶倒立摆系统建模 (4) (一)对象模型 (4) (二)电动机、驱动器及机械传动装置的模型 (6) 第二部分单阶倒立摆系统分析 (7) 第三部分单阶倒立摆系统控制 (11) (一)内环控制器的设计 (11) (二)外环控制器的设计 (14) 第四部分单阶倒立摆系统仿真结果 (16) 系统的simulink仿真 (16) 摘要: 该问题源自对于娱乐型”独轮自行车机器人”的控制,实验中对该系统进行系统仿真,通过对该实物模型的理论分析与实物仿真实验研究,有助于实现对独轮自行车机器人的有效控制。 控制理论中把此问题归结为“一阶直线倒立摆控制问题”。另外,诸如机器人行走过程中的平衡控制、火箭发射中的垂直度控制、卫星飞行中的姿态控制、海上钻井平台的稳定控制、飞机安全着陆控制等均涉及到倒立摆的控制问题。 实验中通过检测小车位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC)完成。实验将借助于“Simulink封装技术——子系统”,在模型验证的基础上,采用双闭环PID控制方案,实现倒立摆位置伺服控制的数字仿真实验。实验过程涉及对系统的建模、对系统的分析以及对系统的控制等步骤,最终得出实验结果。仿真实验结果不仅证明了PID方案对系统平衡控制的有效性,同时也展示了它们的控制品质和特性。 第一部分 单阶倒立摆系统建模 (一) 对象模型 由于此问题为”单一刚性铰链、两自由度动力学问题”,因此,依据经典力学的牛顿定律即可满足要求。 如图1.1所示,设小车的质量为0m ,倒立摆均匀杆的质量为m ,摆长为2l ,摆的偏角为θ,小车的位移为x ,作用在小车上的水平方向上的力为F ,1O 为摆杆的质心。 图1.1 一阶倒立摆的物理模型 根据刚体绕定轴转动的动力学微分方程,转动惯量与角加速度乘积等于作用于刚体主动力对该轴力矩的代数和,则 1)摆杆绕其重心的转动方程为 sin cos y x l F J F l θθθ=- (1-1) 2)摆杆重心的水平运动可描述为 2 2(sin )x d F m x l dt θ=+ (1-2) 3)摆杆重心在垂直方向上的运动可描述为 2 2(cos )y d F mg m l dt θ-= (1-3) 4)小车水平方向运动可描述为 202x d x F F m dt -= (1-4) 选取一个模糊控制的实例讲解,有文章,有仿真,有详细的推导过程。 一.实验题目:基于模糊控制系统的单级倒立摆 二.实验目的与要求: 倒立摆是联结在小车上的杆,通过小车的运动能保持竖立不倒的一种装置,它是一个典型的非线性、快速、多变量和自然不稳定系统,但是我们可以通过对它施加一定的控制使其稳定。对它的研究在理论上和方法上都有其重要意义。倒立摆的研究不仅要追求增加摆的级数,而且更重要的是如何发展现有的控制方法。同时, 它和火箭的姿态控制以及步行机器人的稳定控制有很多相似之处,由此研究产生的理论和方法对一般工业过程也有广泛用途。 本文研究了倒立摆的控制机理,用Lagrange 方法推导了一级倒立摆的数学模型,这为研究多级和其它类型的倒立摆甚至更高层次的控制策略奠定了一个良好的基础。对系统进行了稳定性、可控性分析,得出倒立摆系统是一个开环不稳定但可控的系统的结论。 本文主要研究用极点配置、最优控制和模糊控制方法对倒立摆进行稳定控制。最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。 同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制流程。在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。 三.实验步骤: 1.一级倒立摆系统模型的建立 在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange 方程的建立),可 将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下: 小车质量M;摆杆质量m,长为l;小车在x 轴上移动;摆与竖直方向夹角为θ,规定正方向如图所示;加在小车x 轴上的力为F; 完美WORD格式编辑 旋转倒立摆的模糊控制 摘要:该文针对一级旋转倒立摆系统进行研究。基于Lagrange方程进行了对旋转倒立摆的系统建模,并在Matlab环境下使用了模糊控制,实现了倒立摆的良好控制,采用积分消除了稳态误差。实验证明,此种模糊控制方法有一定的鲁棒性并且控制效果较好。 关键词:一级旋转倒立摆;模糊控制;Matlab 一、控制对象 一级旋转倒立摆 倒立摆系统是自动控制理论中比较典型的控制对象,许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统直观地表现出来。因此它成 为自动控制理论研究的一个较为普遍的研究对象。倒立摆系统作为一个被控对象,是快速、多变量、开环不稳定、非线性的高阶系统,必须施加十分有力的控制手段才能使之稳定。对倒立摆的研究在现实中也有一定的指导意义,航天器的发射就是很好的例子, 未来仿人类机器人的发展也离不开倒立摆模型。一直以来,很多种控制方法已经应用到倒立摆的控制当中本文采用了一种模糊控制方法实现了对一级旋转倒立摆的控制。目标是使倒立摆在保持平衡的同时,旋臂还能够快速跟踪一个位置给定信号。 该次设计所研究的旋转倒立摆系统模型如图1所示,倒立摆模块由倒立摆的摆杆和一个支撑摆杆的旋转臂组成,摆杆固定在旋转臂一端,可以在垂直于转臂的方向上做360度的转动。旋臂的另一端安装在一个旋转伺服装置上,伺服装置通过电机驱动齿轮转动来实现旋臂在水平面内做360度的旋转。在摆杆的底端以及旋臂的里端均装有光电编码器,用来检测角度的变化并将信号传送给计算机。 涉及到的参数有: θ1 ——旋转臂的旋转角 l1 ——旋转臂从电机轴到摆支撑点的长度——0 . 25m J1 ——为旋转臂的转动惯量——0 . 01kg ·m2 θ2 ——倒立摆的旋转角 l2 ——倒立摆的旋转轴到重心的长度——0 . 1m m2 ——倒立摆的质量——0 . 1kg J2 ——倒立摆的转动惯量——0 . 001kg·m2 M ——电机产生的转矩一级直线倒立摆系统模糊控制器设计---实验指导书
单级倒立摆控制系统设计及MATLAB中仿真
模糊控制在倒立摆中的MATLAB仿真应用
单级倒立摆稳定控制实验
一级直线倒立摆系统模糊控制器设计---实验指导书之令狐采学创编
单级倒立摆系统中模糊控制理论的应用.docx
一阶倒立摆控制系统
选取一个模糊控制的实例讲解
旋转倒立摆的模糊控制
相关主题
文本预览