实验二单摆机构的动力学模拟
一、实验目的
1.掌握多体动力学分析软件ADAMS中实体建模方法;
2.掌握ADAMS中施加约束和驱动的方法;
3.计算出单摆运动的位移、速度和加速度。
二、实验设备和工具
1.ADAMS软件;
2.CAD/CAM机房。
三、实验原理
按照单摆机构的实际工况,在软件中建立相应的几何及约束模型,即按照单摆机构的实际尺寸,建立单摆几何实体模型;把摆臂和大地之间的实际连接简化成铰连接,从而在软件中建立其连接副模型;按照摆臂初始运动的参数,如初始转角和转速建立相应的驱动模型;然后利用计算机进行动力学模拟,从而可以求得摆臂在实际工况下的任何时间、任何位置所对应的位移、速度加速度,以及摆臂和大地铰接点处的约束反力等一系列参数。
四、实验步骤
1.问题描述
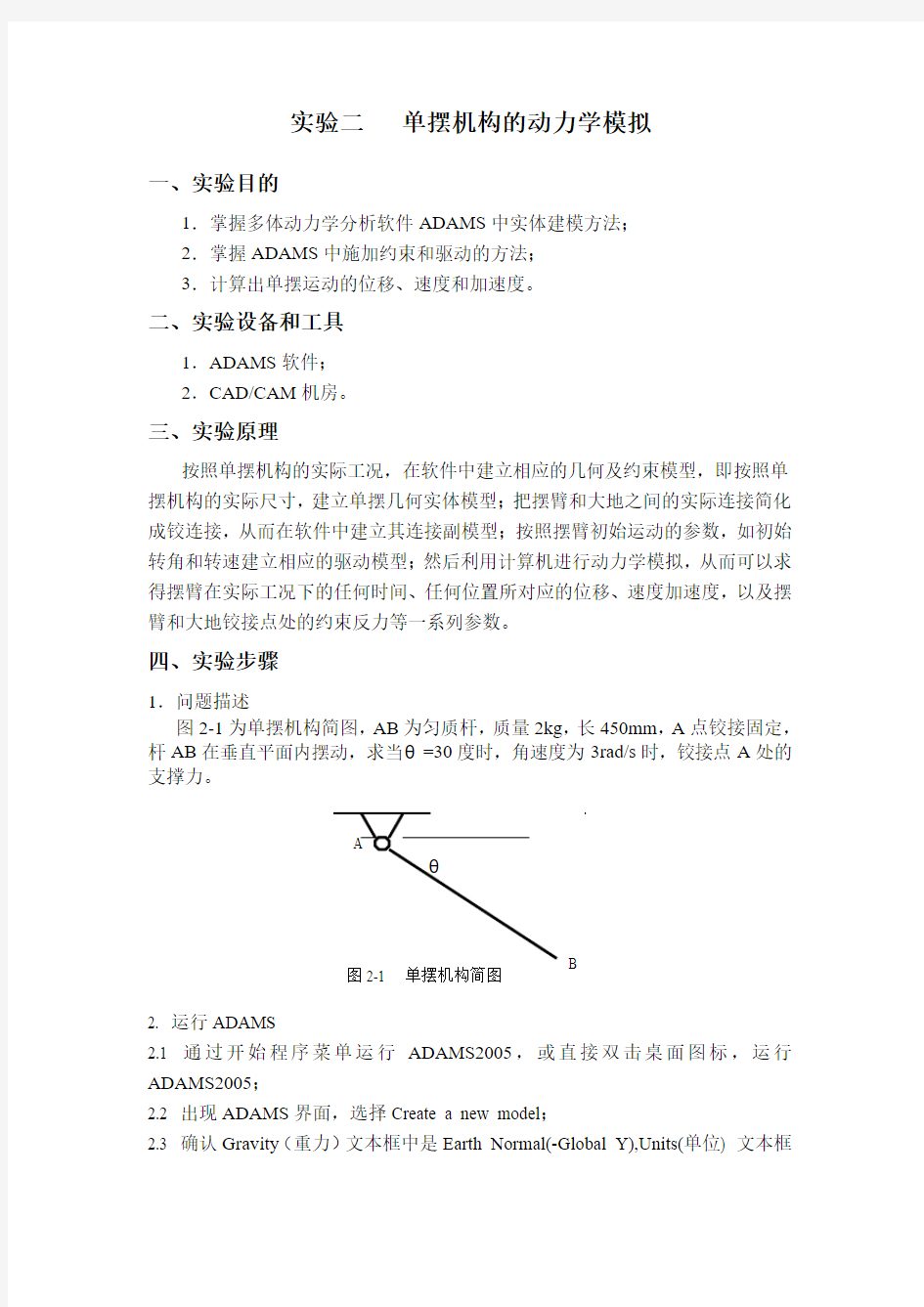
图2-1为单摆机构简图,AB为匀质杆,质量2kg,长450mm,A点铰接固定,杆AB在垂直平面内摆动,求当θ=30度时,角速度为3rad/s时,铰接点A处的支撑力。
2. 运行ADAMS
2.1 通过开始程序菜单运行ADAMS2005,或直接双击桌面图标,运行ADAMS2005;
2.2 出现ADAMS界面,选择Create a new model;
2.3 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units(单位) 文本框
中是MM ,K ,S ,确认后单击OK 按钮;
2.4 在Settings 下拉菜单中选择Working Grid ,系统打开参数设置对话框,在spacing 栏,X 和Y 都输入25mm 。
3. 建立几何模型
3.1 用鼠标右键单击几何工具箱,弹出级联图标,用鼠标左键选中杆件图标;
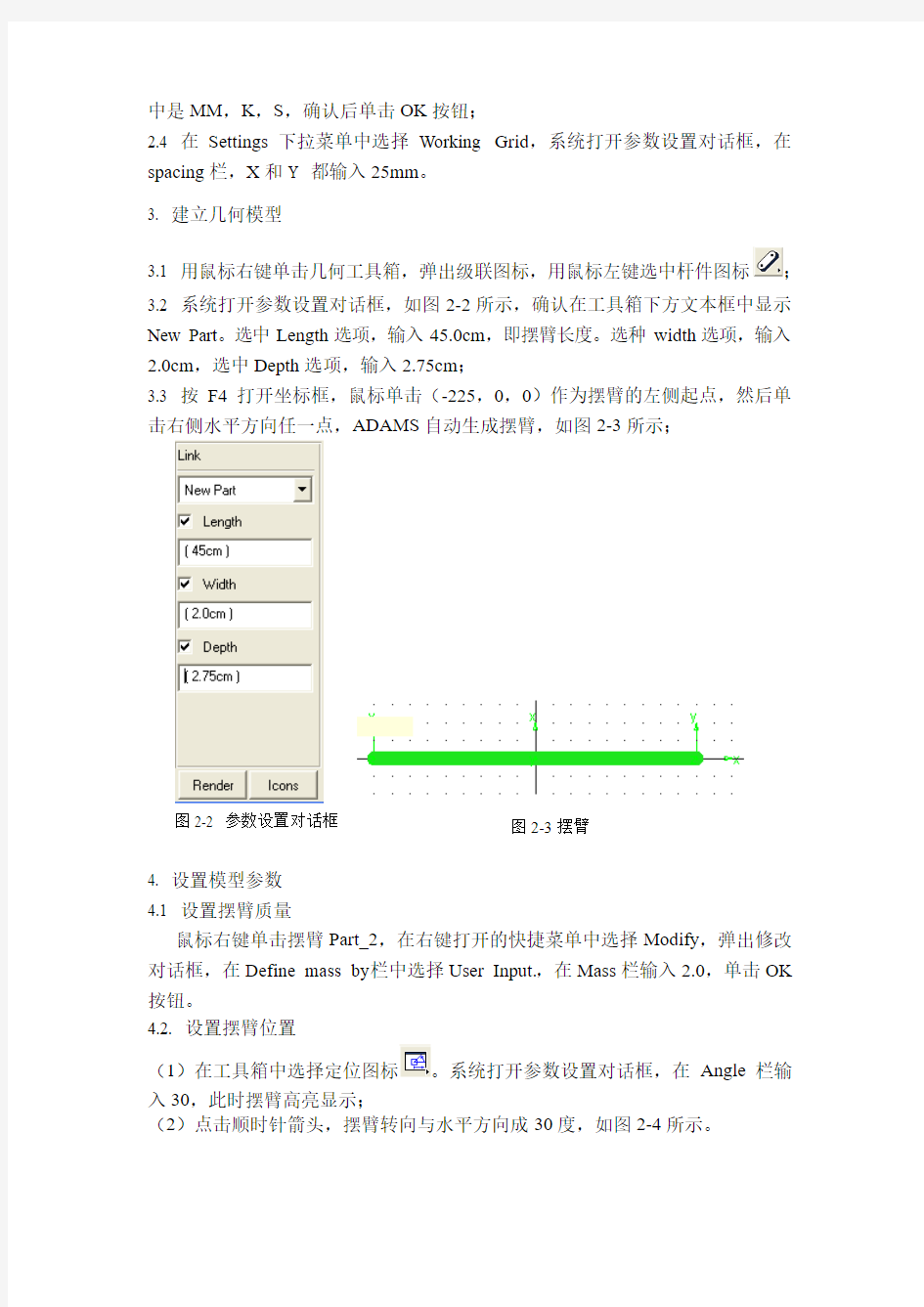
3.2 系统打开参数设置对话框,如图2-2所示,确认在工具箱下方文本框中显示New Part 。选中Length 选项,输入45.0cm ,即摆臂长度。选种width 选项,输入2.0cm ,选中Depth 选项,输入2.75cm ;
3.3 按F4打开坐标框,鼠标单击(-225,0,0)作为摆臂的左侧起点,然后单击右侧水平方向任一点,ADAMS 自动生成摆臂,如图2-3所示;
4. 设置模型参数
4.1 设置摆臂质量
鼠标右键单击摆臂Part_2,在右键打开的快捷菜单中选择Modify ,弹出修改对话框,在Define mass by 栏中选择User Input.,在Mass 栏输入2.0,单击OK 按钮。
4.2. 设置摆臂位置
(1)在工具箱中选择定位图标。系统打开参数设置对话框,在Angle 栏输入30,此时摆臂高亮显示;
(2)点击顺时针箭头,摆臂转向与水平方向成30度,如图2-4所示。
图2-2 参数设置对话框 图2-3摆臂
5. 建立单摆支点
5.1 在主工具箱中选择铰接副。系统打开参数设置对话框,确认在工具箱下方的Construction 文本框中显示1Location 和Normal to Grid ;
5.2 鼠标左键点击摆臂的左端点PART_2.MARKER_1;
5.3 在大地和摆臂之间生成一个铰接支点,如图2-5所示。
6. 设置初始运动 6.1 鼠标右键点击摆臂,在打开的右键快捷菜单中选择Modify 命令,系统打开修改对话框,在Category 项选择Velocity Initial Conditions ;
6.2 在Angular velocity about 项选择Part CM ;
6.3 在下面的选项中选择Z 轴,并输入3.0r 。输入完成后单击OK 按钮。
7. 验证模型
7.1通过验证模型可以发现建模过程中的错误,ADAMS 会自动检测一些错误,如为连接的约束,动力系统中无质量的部件,无约束的部件等。并给出警告可能引发的问题。
7.2 在ADAMS 窗体的右下角,用鼠标右键点击Information
按钮
。 7.3 在弹出的级联图标中选择Verification 图标,弹出信息窗口。
图2-4 转动摆臂位置 图2-5 建立铰接点
模型验证无误后,关闭信息窗口。模型建立完成后,对模型进行仿真。
8. 设置A点支撑力的测量
8.1 鼠标右键点击单败A点,选择JOINT_1然后选择Measure,弹出铰接测量对话框,在Characteristic栏选择Force, component栏选择mag(幅值)。设定完毕单击OK按钮;
8.2 出现一个空白测量窗口。
9 运行仿真
图2-6 单摆转角测量曲线
9.1 点击工具箱中仿真图标,系统打开参数设置对话框,将End Time设为5.0,Step设为50。
9.2 点击开始按钮,单摆开始摆动,测量曲线如图2-6所示。
10. 获得支承反力
10.1 在测量窗口的空白处点鼠标右键,选择Plot:scht1—transfer to full plot,如图2-7所示,在ADAMS/Postprocessor环境下绘制测量曲线;
10.2 选择plot Tracking 图标。要求计算时的条件即为开始仿真时的条件,把
鼠标置于仿真曲线的开始位置;
10.3 窗口顶端,X为仿真时间,y为支撑力,即要计算的支撑力,结果显示为10.72N。
图2-7 铰接点处作用反力测量曲线
五、思考题
1.请尝试在摆臂中心处设置测量点,并模拟出摆臂在该中心点处的运动位移、速度和加速度?
2.设置单摆的初始位置和初速度不同时,请模拟出单摆的运动情况?
3. 进行动力学模拟时,参数End time和Steps分别表示什么含义?
六、实验报告
按照以下要求递交实验报告
1.建模要求
把摆臂建模完成图抓图1幅,粘贴于实验报告中,并对作图过程作简要叙述。
2. 施加运动副和驱动要求
把单摆运动机构施加运动副和驱动完成的图抓图1幅,粘贴于实验报告中,并对施加的运动副和驱动作简要叙述。
3. 模拟结果要求
把摆臂的运动位移、速度、加速度模拟出来,抓其中1幅图,粘贴于实验报告中,并对模拟结果作简要的叙述。
四信息技术四陈伟,等四某击发机构动力学仿真研究 http :?https://www.doczj.com/doc/041769464.html,一E-mail :ZZHD@https://www.doczj.com/doc/041769464.html, ‘机械制造与自动化“作者简介:陈伟(1986-),男,安徽阜阳人,硕士研究生,研究方向:高效毁伤三某击发机构动力学仿真研究 陈伟1,2,陈秋红3,胡有璋1,赵威2,4,陈瑶5 (1.中国人民解放军73853部队江苏南京211811; 2.南京理工大学机械工程学院,江苏南京210094; 3.南京禄口国际机场江苏南京211113; 4.中国人民解放军75250部队广东广州510800; 5.南京军区联勤部信息中心,江苏南京210016) 摘一要:为了研究击发机构的力学特性,对击发机构零部件进行三维实体建模,考虑拨动子驻 栓二发射器推杆和电磁连杆的柔性,利用Hypermesh 软件对它们进行模态分析,生成可被动力 学分析软件ADAMS 调用的模态中性文件,建立击发机构刚柔耦合动力学模型,对击发机构进 行了刚柔耦合动力学分析和对击发机构机理分析使用方法与手段,分析结果对于火炮击发机 构的设计具有一定的参考价值三 关键词:击发机构;多体动力学;刚柔耦合;ADAMS 中图分类号:TP391.9一一文献标志码:B一一文章编号:1671-5276(2015)03-0092-03 Research on Dynamic Simulation of Firing Mechanism CHEN Wei 1,2,CHEN Qiu-hong 3,HU You-zhang 1,ZHAO Wei 2,4,CHEN Yao 5, (1.Unit 73853of PLA ,Nanjing 211811,China ;2.School of Mechanical Engineering ,Nanjing University of Science and Technology ,Nanjing 210094,China ;3.Nanjing Lukou International Airport ,Nanjing 211113,China ;4.Unit 75250of PLA ,Guangzhou 510800,China ;5.Nanjing Military Logistics Department Information Center ,Nanjing 210016,China )Abstract :In order to study the mechanical properties of the firing mechanism ,the modeling of the three Dsolid parts of the firing mechanism is established ,considering the flexibility of the cocking lever sear ,launcher putter and electromagnetic rod ,the modal a-nalysis is done by Hypermesh software ,the modal neutral file used by the dynamic analysis software ADAMS is generated ,the rigid and flexible coupling dynamics model is established and rigid and flexible coupling dynamics of the firing mechanism is analyzed.The methods and approaches of its analysis and the design of the artillery are of certain reference value.Keywords :firing mechanism ;dynamics of multi-body ;rigid /flexible coupling ;ADAMS 0一引言 击发机构是火炮的重要组成部分,在火炮发射时,击 针在冲击力的作用下猛烈地撞击底火,使底火壳发生变 形,底火内的击发药受到猛烈的挤压而被点燃,并进而引 燃发射药[1]三击发机构包含部件众多,且各部件在工作过程中存在复杂的接触和碰撞关系,因此获取击发机构工 作时各部件实际的运动情况,将会为击发机构的结构设计 和性能改善提供重要依据三 1一击发机构工作原理 研究的击发机构是击锤式击发机构,采用电磁击发 和手动机械击发两种击发方式,其中手动机械击发方式 和电磁击发方式原理基本相同,现仅对采用电磁击发方 式时击发机构的运动情况进行分析三击发机构结构如 图1所示三 工作原理为[2]:按压电磁铁击发按钮 击发配电 盒 击发电磁铁 电磁铁推动电磁杆 撞击击发挡板 图1一击发机构三维装配图撞击炮尾中的发射器推杆 撞击发射器杠杆 撞击炮闩中的拨动子驻栓 解脱拨动子 释放击锤弹簧和击发击锤 撞击击针 撞击底火来完成击发的任务三 四29四
前言 一、组织学与胚胎学实习的目的 实习的目的在于把讲课所学的基本理论与实习标本互相印证,以加深和巩固对理论部分的理解,并通过实习过程培养学生正确的科学作风及基本技术操作,逐步达到独立使用光学显微镜进行观察切片的能力,从而提高独立思考和分析综合的水平,为其他医学课程打下一定的形态学基础。 二、实习的要求 组织学实习主要是以自学为主,进行独立操作的原则,教师只是在实习方法和具体内容上予以指导,为此对参加实习的同学提出以下要求: 1.按时上下课,不得迟到、早退、遵守课堂纪律,穿白大衣。 2.实习前预习“实习指导”,实习时按要求认真观察。 3.用学生证,从显微镜室领取显微镜使用,并填好使用记录本中各项内容。 4.实习时要爱护显微镜及标本,损坏者要求及时报告,并给以赔偿。 5.固定座位,不得随意调动。实习桌少放物件,保持充分的工作空间。 6.班长负责从实验准备室借出切片标本,结束后如数归还。 7.组织学实习的绘图方法,为了加深认识和理解,应掌握绘图显示,镜下观察到的细胞,组织和器官的组织结构并注字。 工具:红蓝彩色铅笔与黑色铅笔各一支,将图画在实验报告纸上。 方法: 1.按照显微示教照片,选择典型。 2.确定画面 3.构画草图 4.着色注字,红色嗜酸性结构,蓝色示嗜碱性结构,黑色铅笔注字。 5.绘图顺序:画管状器官时,应从腔面向外侧画,画实质性器官,应从表面向内部画。 6.在图的左上角,应注明标本名称、取材与染色方法 三、观察切片标本的注意事项 在显微镜下所观察到的形态结构,与理论上所理解不一致时,应从以下几个方面考虑: 1.有机体生活时,机能状态不同:如腺细胞充满分泌物和完全排出后的形态不同,由柱状可以变为扁平或立方。 2.立体和平面,全面与局部和关系: 我们观察的标本是组织,器官的局部一个切面,不同的断面,应仔细体会把切面内容有机联系起来,建立整体观念。 3.在切片制作的过程中常见有以下几种人为现象: (1)组织的收缩现象:制作切片过程中,应用各种化学药品处理组织,可引起组织的收缩,所以在切片中,常看到一部分组织与另一部分组织分离,或看到细胞与周围有较大的空隙。(2)组织死后变化:动物死亡时间较长,或取材时刀不锋利,使组织受损,组织出现死后变化,在切片中看到细胞结构模糊不清,核固缩等情况。 (3)组织皱褶现象:石蜡切片很薄,在粘片时易皱褶没有展平,经染色后,皱褶处是染色深而厚的一条。 (4)固定液未洗尽,有时存异物,或染色液的渣子。 (5)刀痕,切片刀有缺口,使被切的组织出现直线样空白。
基于ADAMS 的摆盘机构动力学仿真分析 刘剑钊1党建军2张进军2 (1中国工程物理研究院总体工程研究所,绵阳621900)(2西北工业大学航海学院,西安710072) ADAMS-based dynamic simulation analysis for wobble-plate mechanism LIU Jian-zhao 1,DANG Jian-jun 2,ZHANG Jin-jun 2 (1System Engineering Institute ,China Academy of Engineering Physics ,Mianyang 621900,China )(2School of Marine Engineering ,Northwestern Polytechnical University ,Xi ’an 710072,China ) 文章编号:1001-3997(2012)04-0076-02 【摘要】简要介绍了摆盘机构组成和工作原理,建立摆盘机构三维模型,运用机械系统动力学分 析软件ADAMS 对机构进行动态仿真分析, 得到关键运动部件的运动规律曲线和动力学分析曲线,结果表明ADAMS 对复杂机构的仿真准确可靠,得到了活塞与连杆轴线不重合导致的扰动与气缸壁间侧压力和力矩分析曲线,零部件间冲击和扰动产生的动力学响应,为摆盘机构减震降噪的优化设计提供了重要参数。表明了ADAMS 对复杂机构进行仿真分析的可行性,对相关研究具有借鉴意义。 关键词:摆盘机构;ADAMS ;动态仿真;动力学 【Abstract 】It gives a detailed introduction of the constitution and operating principle of wobble -plate , and sets up its three-dimensional model.By applying the ADAMS -software for dynamics analysis of mechanism,the dynamic simulation of the wobble plate is analyzed.And the motion regulation curves and dynamics analysis curves for some key parts are obtained.The result suggests that ADAMS-based simulation analysis can bring about dynamic response between impulse and disturbance among the components ,hence correct and reliable ,and the disturbance caused by misalignment between piston and axis of link is ob -tained ,as well as analysis curves for force within the piston and cylinder wall and the torque.The research offers significant parameters for optimizing the design of wobble plate in the aspect of shock absorption and noise reduction.It shows that ADAMS-software being applied for analysis complex mechanism is feasible and shall provide reference for similar study. Key words :Wobble plate ;ADAMS ;Dynamic simulation ;Dynamics 中图分类号:TH16,TP391.7 文献标识码:A *来稿日期:2011-06-14 1引言 摆盘机构[1]作为一种新型发动机动力总成核心组件,适合大深度大功率UUV (水下无人航行器)使用。摆盘轴线的轨迹是圆锥面,缸体固定不旋转,摆盘的运动只是空间周期性摆动。与传统平面曲柄连杆活塞发动机相比,具有结构简单紧凑,功率质量比大,振动噪声小,背压对发动机功率影响小等特点。摆盘机构运动复杂,参数繁多,难以建立完整数学模型进行理论计算,借助机械系统动力学仿真软件ADAMS ,对摆盘机构虚拟样机模型进行运动学和动力学分析,得到不同工况下摆盘机构的运动规律和动力学响应。 2多刚体运动学理论 利用ADAMS 建立机械系统仿真模型时,系统中各构件之间存在运动副的连接,设运动副的约束方程数为nh ,用系统广义坐标矢量表示的运动学约束方程为: 准k (q )=准k 1(q ),准k 2(q ),…,准k nh (q ** )=0(1) 又因为在考虑运动学分析时,系统具有确定运动,所以要使 系统实际自由度为零,因此对其施加等于自由度(nc-nh )的驱动约束:准D (q ,t )=0 (2)式(1)和(2)可以统一表示为:准(q ,t )= 准k (q ,t ) 准D (q ,t ** ) =0 (3) 对ADAMS 运动学方程求解: 在ADMAS 仿真软件中,运动学分析研究零自由度系统位置、速度、加速度和约束反力,因此只 需求解系统约束方程:准(q ,t )=0 (4) 任一时刻t n 的位置确定,可由约束方程的牛顿—拉夫森(Newton-Raphson )迭代方法求得:坠准j |△q j =准(q j t n )(5)式中:△q j =q j+1-q j —第j 次迭代。t n 时刻速度、加速度的确定,可由约束方程求一阶、二阶时间 导数得到:坠准坠q q 觶=-坠准坠t (6)坠准坠q q 咬=-坠2Ω坠2t 2+n k =1Σn l =1Σ坠2 准坠q k 坠q l q 觶k q 觶l +坠坠坠T 坠q 觶觶觶 q 觶坠坠q 坠准坠t 觶觶 q 觶觶 觶觶觶觶觶觶觶觶觶觶觶觶 觶 觶 觶 觶觶觶觶觶觶 觶觶觶觶(7) t n 时刻约束反力的确定,可由带乘子拉格朗日方程得到: 坠准 觶觶 T λ=-d d t 坠T 坠q 觶觶T -坠T 坠q 觶觶觶T -觶觶 Q (8) 3摆盘机构虚拟样机模型 3.1三维实体模型 针对摆盘机构有多个零件组成,个别零件结构复杂,直接利用ADAMS 自身建模功能很难完成三维实体建模的问题,采用 Machinery Design &Manufacture 机械设计与制造 第4期2012年4月 76
组织学与胚胎学 实验报告 专业班级 学号姓名 教师实验室 遵义医学院组织胚胎学教研室
目录 前言 (2) 实验一显微镜的正确使用和维护 上皮组织、固有结缔组织 (3) 实验二软骨与骨、血液 (7) 实验三肌组织、神经组织 (10) 实验四循环系统、免疫系统 (13) 实验五内分泌系统、眼和耳※ (17) 实验六消化系统 (20) 实验七呼吸系统、泌尿系统 (24) 实验八生殖系统、皮肤 (28) 实验九胚胎学总论 (31) ※实验十心脏发生 (34) ※为护理学、药剂、药检、影像医学等专业免修内容
前言 (一)书写实验报告,是组织学和胚胎学实验课教学的重要内容,也是对学生进行能力训练的基本手段。为了帮助学生了解、掌握组织学和胚胎学实验报告的规范式书写要求,克服过去使用单页实验报告纸易丢失、难保存、考核内容单一等缺点,我们根据《组织学和胚胎学实验教学大纲》的要求,帮助学生掌握人体细微结构和人胚发育的基本理论、基本知识及相应的基本技能,开发学生的智力,培养和训练学生独立观察、独立思考和独立工作的能力,提高学生分析问题和解决问题的能力。通过实验报告使用,希望能对本课程的学习起到积极作用。 (二)绘图是组织学实验的重要环节,认真观察组织切片后,准确绘出简图,加深对组织结构的理解,便于复习记忆,绘图时要注意各部结构之间的大小比例关系,一般用红、兰铅笔描绘常规染色的结构,用红色描绘嗜酸性结构,如:细胞质和纤维;用兰色描绘嗜碱性结构:如细胞核。注意色调的深浅,笔道均匀,正确反映镜下的结构特点,图中注字要规整;引线要平行、对齐;最后在图下注明标本名称、染色方法和放大倍数。 (三)每次课实验报告要求在课内完成,下课前交实验指导教师批改。本实验报告是评定学生平时成绩的重要依据,请同学们妥善保管,期末统一收回给予评分。 (四)本实验报告可供我院各专业本、专科医学生及研究生学习组织学和胚胎学实验课时选用,以训练和培养学生对实验内容的分析、整理、综合、归纳的能力,为今后的学习和科学研究,书写科研论文打下一定的基础。 (五)组织学与胚胎学考分比例:实验部分:35 % 理论部分:65% 2006年8月
| 论坛社区 《机械系统动力学仿真分析软件》(MSC.ADAMS.2005.R2)R2 资源分类: 软件/行业软件 发布者: Coolload 发布时间: 2005-12-18 20:22 最新更新时间: 2005-12-19 07:04 浏览次数: 14548 实用链接: 收藏此页 eMule资源 下面是用户共享的文件列表,安装eMule后,您可以点击这些文件名进行下载 [机械系统动力学仿真分析软件].[$u]MSC.ADAMS.2005.R2.rar201.2MB [机械系统动力学仿真分析软 295.4MB 件].MSC_ADAMS_V2005_ISO-LND-CD1.iso [机械系统动力学仿真分析软185.0MB
件].MSC_ADAMS_V2005_ISO-LND-CD2.bin [机械系统动力学仿真分析软 6.5KB 件].Msc.Adams.v2005.Iso-Lnd-Cd1-Crack.rar 全选480.4MB eMule主页下载eMule使用指南如何发布 中文名称:机械系统动力学仿真分析 软件 英文名称:MSC.ADAMS.2005.R2 版本:R2 发行时间:2005年12月15日 制作发行:美国MSC公司 地区:美国 语言:英语 简介: [通过安全测试] 杀毒软件:Symantec AntiVirus 版本: 9.0.0.338 病毒库:2005-12-16 共享时间:10:00 AM - 24:00 PM(除 非线路故障或者机器故障) 共享服务器:Razorback 2.0 [通过安装测试]Windows2000 SP4 软件版权归原作者及原软件公司所 有,如果你喜欢,请购买正版软件
月球软着陆控制系统综合仿真及分析(课程设计) 在月球探测带来巨大利益的驱使下,世界各国纷纷出台了自己的探月计划,再一次掀起了新一轮探月高潮。在月球上着陆分为两种,一种称为硬着陆,顾名思义,就是探测器在接近月球时不利用制动发动机减速而直接撞击月球。另一种称为软着陆,这种着陆方式要求探测器在距月面一定高度时开启制动系统,把探测器的速度抵消至零,然后利用小推力发动机把探测器对月速度控制在很小的范围内,从而使其在着陆时的速度具有几米每秒的数量级。显然,对于科学研究,对探测器实施月球软着陆的科学价值要大于硬着陆。 1月球软着陆过程分析 目前月球软着陆方式主要有以下两种方式: 第一种就是直接着陆的方式。探测器沿着击中轨道飞向月球,然后在适当的月面高度实施制动减速,最终使探测器软着陆于月球表面。采用该方案时,探测器需要在距离目标点很远时就选定着陆点,并进行轨道修正。不难发现,该方法所选的着陆点只限于月球表面上接近轨道能够击中的区域,所以能够选择的月面着陆点的区域是相当有限的。 第二种方法就是先经过一条绕月停泊轨道,然后再伺机制动下降到月球表面,如图17-1所示。探测器首先沿着飞月轨道飞向月球,在距月球表面一定高度时,动力系统给探测器施加一制动脉冲,使其进入一条绕月运行的停泊轨道;然后根据事先选好的着陆点,选择霍曼变轨起始点,给探测器施加一制动脉冲,使其进入一条椭圆形的下降轨道,最后在近月点实施制动减速以实现软着陆。 主制动段 开始点 图17-1 月球软着陆过程示意图 与第一种方法相比,第二种方法有以下几个方面较大的优越性: 1)探测器可以不受事先选定着陆点的约束,可以在停泊轨道上选择最佳的着陆点,具有很大的选择余地。
组织学与胚胎学实验考试图及答案照片名称:14平滑肌 照片名称:15尼氏体 照片名称:16轴丘 照片名称:17郎飞结 照片名称:21淋巴小结 照片名称:19小静脉小动脉 照片名称:18毛细血管 照片名称:1单层柱状上皮 照片名称:22皮质 照片名称:23淋巴小结生发中心 照片名称:24脾白髓 照片名称:28皮肤 照片名称:27腺垂体 照片名称:26肾上腺皮质
照片名称:25甲状腺滤泡照片名称:29胃(四层) 照片名称:31主细胞 照片名称:30胃 照片名称:32壁细胞 照片名称:36粘液性腺泡照片名称:35潘氏细胞照片名称:34小肠绒毛照片名称:33小肠 照片名称:37浆液性腺泡照片名称:39胰岛 照片名称:40肝 照片名称:38胰腺 照片名称:44肺泡 照片名称:43肝门管区
照片名称:42肝血窦 照片名称:41中央静脉 照片名称:45肾小体 照片名称:46近曲小管(近端小管曲部)照片名称:48致密斑 照片名称:52生精小管 照片名称:51滤过屏障 照片名称:49足细胞 照片名称:56初级卵泡 照片名称:55精子 照片名称:54支持细胞 照片名称:53精原细胞 照片名称:60胚泡 照片名称:59卵丘
照片名称:58次级卵泡 照片名称:57原始卵泡初级卵泡照片名称:61胚泡 照片名称:62二胚层胚盘 照片名称:63二胚层胚盘 照片名称:64脐带 照片名称:3杯状细胞 照片名称:红细胞白细胞 照片名称:65胎盘 照片名称:5浆细胞 照片名称:7嗜酸性粒细胞 照片名称:6中性粒细胞 照片名称:4肥大细胞 照片名称:12骨骼肌 照片名称:10单核细胞
Assignment Vehicle system dynamics simulation 学院:机电学院 专业:机械工程及自动化 姓名: 指导教师:
The model we are going to analys: The FBD of the suspension system is shown as follow:
According to the New's second Law, we can get the equation: 2 )()(221211mg z z c z z k z m --+-=???? 221212)()(z k mg z z c z z k z m w +-----=? ??? 0)()()()(222111222111=-++--+-++--+? ? ? ? ? ? ? ?w w w w z L z k z L z k z L z c z L z c z m χχχχ 0)()()()(2222111122221111=-++----++---? ? ? ? ? ? ? ?w w w w z L z L k z L z L k z L z L c z L z L c J χχχχχ d w w w w Q z L z k z L z c z m ,111111111)()(-=------? ? ? ? ?χχ d w w w w Q z L z k z L z c z m ,222222222)()(-=-+--+-? ????χχ When there is no excitation we can get the equation: 2)()(221211mg z z c z z k z m --+-=???? 2 21212)()(z k mg z z c z z k z m w +-----=? ??? Then we substitude the data into the equation, we write a procedure to simulate the system: Date: ???? ?? ??? ??==?==?===MN/m 0.10k m 25.1s/m kN 0.20MN/m 0.1m kg 3020kg 2100kg 3250w 2l c k I m m by w b
课题:《机械原理》课程设计指导老师:张青高峰 组员:5080209105龚潇 5080209110 胡凯 5080209257 王倩茹 2011年1月5日
目录 1.组员分工 (3) 2.课程设计目的 (4) 3.设计任务 (4) 4.已知条件和数据 (5) 5.主要设计内容 (6) 5.1机构位移方程 (6) 5.2质心位移方程 (6) 5.3机构速度、加速度方程 (7) 5.4质心速度、加速度方程 (8) 5.5静力学方程 (9) 5.6动力学方程 (10) 5.7惯性力平衡方程 (13) 6.设计结果讨论 (16) 6.1用Matlab绘制机构随输入运动的输出运动位移、速度、加速度曲线 (16) 6.2用Matlab计算绘制机构在不计惯性时各构件铰链的受力和输入力(或矩)的曲线 (31) 6.3用Matlab计算绘制机构在考虑惯性时各构件铰链的受力和输入力(或矩)的曲线 (32) 7.设计体会 (37) 8.参考文献 (1)
1.组员分工: 建立机构运动及力学方程组:王倩茹 Matlab解方程组、机械原理课程中布置的作业4-3中的编程:龚潇 机构动画仿真、绘制图线、机械原理课程中布置的作业4-3中的绘图:胡凯报告书写及PPT制作:王倩茹 左起:龚潇,王倩茹,胡凯
2.课程设计目的 通过机械原理课程设计,使同学掌握机构的位置、速度、加速度、静力学、动力学、惯性力平衡等方法,并能借助计算机实现机构的性能分析和该机构的运动仿真演示,从而了解机构的性能和特性。 3.设计任务 3.1根据机械原理课程设计选题,选定固定坐标系,用复数向量方程法建立机构 的位移方程即各构件的质心位移方程; 3.2在机构位移方程基础上,建立机构的速度、加速度方程以及各构件的质心的 加速度方程; 3.3在已知外力和运动分析的基础上,建立机构的静力学方程(不考虑惯性影 响),即求出机构中各构件铰链的受力和输入构件的驱动力(矩); 3.4在已知外力和运动分析的基础上,建立考虑惯性和加速度影响的机构动力学 方程,即求出考虑惯性时机构中各构件铰链的受力和输入驱动力(矩);3.5为了使机构实现惯性力完全平衡,用复数向量法建立该机构的惯性力完全平 衡条件; 3.6在上述理论分析的基础上,利用计算机编程计算并绘出机构随输入运动的输 出运动位移、速度、加速度曲线;分别计算并绘出机构在不计惯性和考虑惯性使各构件铰链的受力和输入力(或矩)的曲线。 3.7在计算机上,设计软件实现该机构的运动仿真演示。
!汽车动力学发展历史简介 汽车动力学是伴随着汽车的出现而发展起来的 一门专业学科。人们很早就认识到“$%&’()*+”转向和应用弹性悬架可使乘客感到更加舒适等基本原 理[,],但那只是一种感性的认识。在各国学者的不懈 努力下,这门学科逐渐发展成熟。-’.’/在,00#年1)’%23举行的题为“车辆平顺性和操纵稳定性”的会议上发表的论文,对,00"年以前汽车动力学的发 展做了较为全面的总结[ !],见表,。近年来汽车动力学又有了进一步发展,大量的高水平学术论文和经典的汽车动力学专著相继被发表,而且开发出许多专为汽车动力学研究建立模型的软件,如美国密西根大学开发的$456%*(、$45678)等商业软件。汽车是一复杂的连续体系统,要想对其进行动力特性的预测和优化需建立经合理简化的抽象汽车模型,以达到缩短产品开发周期、保证整车性能指标和降低产品成本的目的。 "汽车动力学模型的发展 汽车动力学从严格意义上来讲包括对一切与车 辆系统相关运动的研究,然而最为核心的是平顺性和操纵稳定性这两大领域,一般认为平顺性主要研究影响车身的垂向跳跃、俯仰、侧倾振动的因素,而操纵稳定性主要研究车辆的横向、横摆和侧倾运动。建模时一般假设平顺性和操纵稳定性之间无偶合关系。 "#!汽车平顺性模型 在汽车平顺性的早期研究阶段,限于当时数学、 力学理论、计算手段及试验方法,把系统简化成集中质量—弹簧—阻尼模型,如图,所示。 图,整车集中质量—弹簧—阻尼模型 此类模型一般先以函数的形式给出其动能!和势能"以及表达系统阻尼性质的物理量耗散能 !的表达式: 【摘要】汽车动力学包括对一切与车辆系统相关运动的研究,其最核心的是平顺性和操纵稳定性这两大领域。在简要说明了汽车动力学发展过程的基础上介绍了平顺性和操纵稳定性两大领域的模型发展过程。平顺性模型主要经过集中质量—弹簧—阻尼模型、有限元模型和动态子结构模型阶段;而操纵稳定性模型从低自由度线性模型、非线性多自由度模型发展到多体模型。最后提出了汽车动力学仿真模型的发展动向。 主题词:汽车动力学模型发展 中图分类号:9:;,<,文献标识码:$ 文章编号:,"""=#>"#(!""#)"!=""",=": $%&%’()*%+,(-.%/01’%$2+3*0140*5’3,0(+6(7%’ ?2*+.@’8A?2*+.B8+.2*8AC48D*8/8+AB8*D6+.E’8 (B8/8+9+8F’(785G ) 【89:,;31,】H’28%/’IG+*)8%7754I8’7*//)6F’)’+57(’/’F*+556F’28%/’7G75’)*+I 857%6(’8752’5J6E8’/I76E (8I’K *L8/85G *+I 2*+I/8+.75*L8/85G<1+52’M*M’(AI’F’/6M8+.M(6%’776E )6I’/76E F’28%/’(8I’*L8/85G *+I 2*+I/8+.75*L8/85G *(’8+K 5(6I4%’I *E5’(I’F’/6M)’+5%64(7’6E F’28%/’IG+*)8%78778)M/G 8+5(6I4%’I 车辆动力学主要仿真软件 I960年,美国通用汽车公司研制了动力学软件DYNA主要解决多自由度无约束的机械系统的动力学问题,进行车辆的“质量-弹簧-阻尼”模型分析。作为第一代计算机辅助设计系统的代表,对于解决具有约束的机械系统的动力学问题,工作量依然巨大,而且没有提供求解静力学和运动学问题的简便形式。 随着多体动力学的诞生和发展,机械系统运动学和动力学软件同时得到了迅速的发展。1973 年,美国密西根大学的N.Orlandeo 和,研制的ADAM 软件,能够简单分析二维和三维、开环或闭环机构的运动学、动力学问题,侧重于解决复杂系统的动力学问题,并应用GEAR 刚性积分算法,采用稀疏矩阵技术提高计算效率。1977年,美国Iowa 大学在,研究了广义坐标分类、奇异值分解等算法并编制了DADS软件,能够顺利解决柔性体、反馈元件的空间机构运动学和动力学问题。随后,人们在机械系统动力学、运动学的分析软件中加入了一些功能模块,使其可以包含柔性体、控制器等特殊元件的机械系统。 德国航天局DLF早在20世纪70年代,Willi Kort tm教授领导的团队就开始从事MBS软件的开发,先后使用的MBS软件有Fadyna (1977)、MEDYNA1984),以及最终享誉业界的SIMPAC(1990). 随着计算机硬件和数值积分技术的迅速发展,以及欧洲航空航天事业需求的增长,DLR决定停止开发基于频域求解技术的MED YN软件,并致力于基于时域数值积分技术的发展。1985年由DLR开发的相对坐标系递归算法的SIMPACI软件问世,并很快应用到欧洲航空航天工业,掀起了多体动力学领域的一次算法革命。 同时,DLR首次在SIMPAC嗽件中将多刚体动力学和有限元分析技术结合起来,开创了多体系统动力学由多刚体向刚柔混合系统的发展。另外,由于SIMPACI算法技术的优势,成功地将控制系统和多体 计算技术结合起来,发展了实时仿真技术。 震源车系统动力学模型分析报告 一、项目要求 1)独立完成1个应用Adams 软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。 2)上交分析报告和Adams 的命令文件,命令文件要求清楚、简洁。 1K 1 C 2K 2C 3 C 3 K 3 M 1 M 2M 二、建立模型 1)启动admas ,新建模型,设置工作环境。 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 图 2-1 设置工作网格对话框 2)在ADAMS/View零件库中选择矩形图标,参数选择为“on Ground”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。以同样的方法,选择参数“New Part”建立part-2、part-3、part-4,得到图形如2-3所示, 图 2-2 图 2-3创建模型平台 3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4 图 2-4 创建弹簧阻尼器 4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。 弹簧阻尼系统动力学模 型a m s仿真 WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8- 震源车系统动力学模型分析报告 一、项目要求 1)独立完成1个应用Adams软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。 2)上交分析报告和Adams的命令文件,命令文件要求清楚、简洁。 二、建立模型 1)启动admas,新建模型,设置工作环境。 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成750mm和500mm,间距(Spacing)中的X和Y都设置成50mm。然后点击“OK”确定。如图2-1所表示。 图 2-1 设置工作网格对话框 2)在ADAMS/View零件库中选择矩形图标,参数选择为“on Ground”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。以同样的方法,选择参数“New Part”建立part-2、part-3、part-4,得到图形如2-3所示, 图 2-2 图 2-3创建模型平台 3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4 图 2-4 创建弹簧阻尼器 4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。 图2-5 添加约束 至此模型创建完成 三、模型仿真 1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚 组织学与胚胎学实验报告 专业临床医学专业 班级12级二班 姓名蒋巧群 学号201250475 电子信箱1270103585 完成日期2013/3/12 实验一血液 1.报告主题:嗜酸性粒细胞 主题属性:自选 标本号:7# 材料:人血涂片 染色:Wright’s染色 教学要求:掌握嗜酸性粒细胞的光镜结构特征 嗜酸性粒细胞嗜酸性颗粒 2.报告主题:嗜碱性粒细胞 主题属性:自选 标本号:7# 材料:人血涂片 染色:Wright’s染色 教学要求:掌握嗜碱性粒细胞的光镜结构特征 嗜碱性颗粒 3.报告主题:淋巴细胞 主题属性:自选 标本号:7# 材料:人血涂片 染色:Wright’s染色 教学要求:掌握淋巴细胞的光镜结构特征 4.报告主题:单核细胞 主题属性:自选 标本号:7# 材料:人血涂片 染色:Wright’s染色 教学要求:掌握单核细胞的光镜结构特征 5.报告主题:中性粒细胞 主题属性:自选 标本号:7# 材料:人血涂片 染色:Wright’s染色 教学要求:掌握中性粒细胞的光镜结构特征 特殊颗粒 .6.报告主题:红细胞 主题属性:自选 标本号:7# 材料:人血涂片 染色:Wright’s染色 教学要求:掌握红细胞的光镜结构特征 实验二肌组织1.报告主题:平滑肌 主题属性:自选 标本号:21# 材料:猫回肠横切面 染色:HE 要求:掌握平滑肌的纵.横断面的结构特点 纵切面 横切面 2.报告主题:骨骼肌 主题属性:自选 标本号:8# 材料:狗舌骨骼肌切片 染色:HE染色 要求:掌握骨骼肌的纵.横断面的结构特点 纵切面 3.报告主题:心肌 主题属性:自选 标本号:12# 材料:人心肌切片 染色:HE染色 要求:掌握心肌纤维的纵.横断面的结构特点 纵切面 新一代动力学仿真软件——MotionView 机械系统的动力学性能是制造商和用户共同关心的重要性能指标,如果能在新产品方案的制定和产品研发阶段通过虚拟仿真的手段就能对机械系统的动力学性能进行充分的分析评估和优化,无疑能大大降低产品方案制定和设计中的风险,缩短产品研发周期,减小物理样机的实验次数,从而使企业在激烈的市场竞争中取得先机。美国澳汰尔工程软件公司的新一代动力学仿真软件MotionView在该领域内提供了专业的解决方案。□ 澳汰尔工程软件(上海)有限公司吴俊刚 随着国外机械产品不断占领中国市场,国内机械行业面临巨大的竞争压力,特别突出的是汽车行业。因而新产品的性能以及研发的成本和周期无疑是企业新品自主研发的核心问题。但传统的研发手段成本高、周期长,已经无法满足产品研发需求。随着CAD/CAE 技术的突飞猛进,虚拟仿真技术已成为企业自主创新研发的有效手段。 美国澳汰尔工程软件公司开发了一套集CAE分析和优化的软件平台-HyperWorks系列产品。包括:前处理软件HyperMesh、后处理可视化环境HyperView、多体分析和优化工具OptiStruct、结构动力学分析软件MotionView、板料成形分析工具HyperForm、CAE环境下实验设计、优化及随机分析工具HyperStudy等等。下面主要介绍一下HyperWorks中的多体动力学分析软件MotionView。 MotionView软件概述 MotionView是澳汰尔公司 开发的新一代系统动力学仿真 分析软件。它是一个通用的多 体动力学仿真前处理器和可视 化工具,采用完全开放的程序 架构,可以实现高度的流程自 动化和客户化定制。 MotionView具有简洁友好 的界面,高效的建模语言 (MDL),同时也是第一款支持 多求解器输出的多体动力学软 件,可以将模型直接输出成 ADAMS、DADS、ABAQUS和 NASTRAN等多种求解格式文 件,或直接由MotionSolve求解。 而MotionSolve求解器的是 采用新一代的点辅助坐标系原 理(Point-Auxilary-Coordinate system)的多体动力学求解器, 它具有计算更快速、更稳定的 特点,而且适用范围广泛,可 以处理机械系统动力学、车辆 动力学、隔振、控制系统设计、 针对耐久性分析的载荷预期和 稳健性仿真等多方面的问题, 还可以对零自由度的机械系统 和具有复杂非线性应变的模型 进行仿真。 MotionView特征及优势 MotionView作为新一代的 动力学仿真软件,除了具有其 它多体动力学软件所具备的基 本功能外,还在如下方面有自 身的突出特征。 1、特色功能 模型库:针对某些应用领 域开发模型库,直接进行子系 统组装和工况施加,通过对拓 扑关系和参数缺省值的修改快 速建立用户模型。 报告模板:自动生成并提 交行业标准的图形和曲线,通 过数据叠加快速对结果进行分 析比较。 载荷输出:使用Load Export 工具直接将多体动力学分析结 第一章组织学绪论 选择题: 一、A型题 1. 电子显微镜最高的分辨率为: A 0.2nm B 2nm C 0.2μm D 10nm E 0.04μm 2. 光学显微镜最高的分辨率为: A 2nm B 0.2μm C 0.2nm D 2μm E 5μm 二、B题型 题 1~2 Aμm B mm C nm D cm E A 1. 光镜结构常用计量单位是: 2. 超微结构常用计量单位是: 题3~4 A蓝紫色B粉红色C橘红色D黄绿色E蓝绿色 3.HE染色中核染为: 4. HE染色中结缔组织的胶原纤维染成: 题5~6 A投射电子显微镜B扫描电镜C荧光显微镜D暗视野显微镜 E相差显微镜 5.研究细胞器的超微结构用: 6. 研究细胞表面结构用: 第二章上皮细胞 一、A型题 第三章关于上皮细胞的功能哪项错误? A分泌 B 呼吸 C 保护 D 营养 E 排泄 第四章未角化复层鳞状上皮细胞分布在下列哪个器官? A食管B气管C输卵管D输精管E输尿管 第五章关于被覆上皮的特点下列哪项是错误? A被覆在身体表面和器官腔面B上皮内有丰富的血管C具有高度的再生能力 D细胞形状较规则并排列紧密E有内胚层` 中胚层和外胚层发生 第六章下列哪个器官被覆单层柱状上皮? A血管B膀胱C皮肤D小肠E食管 第七章关于复层扁平上皮的哪项特点是正确的? A细胞层数多,是最厚的一种上皮B浅层为柱状细胞C细胞间隙宽,其中有毛细血管D上皮与结缔组织的连接面平直E被覆在小肠腔面 第八章下列关于变移上皮的特点哪项是错误的? A分布于排尿管道的大部分B细胞的层次与形状可随器官胀缩而改变 C表层细胞呈大立方形,可有二个细胞核D有分泌作用 E表层细胞有防止尿液侵蚀的作用 第九章下列哪种结构不属于细胞间连接? A桥粒B中间连接C缝隙连接D紧密连接E半桥粒 第十章下列关于纤毛的描述哪项是错误的? A纤毛表面有细胞膜,内为细胞质,含有纵行的微管 B微管的排列,外周为九组双联微管,中央为二条单微管C微管的下端与基体相连 D纤毛的摆动是由于微管的相互滑动E参与细胞的吸收作用 第十一章关于假复层纤毛柱状上皮的特点哪项错误? A细胞的表面均有纤毛B所有的细胞都附在基膜上C属于单层上皮 D细胞高矮不同,故细胞核不在同一个平面E具有分泌和保护作用 第十二章光镜下所见的纹状缘或刷状缘,电镜下是: A微管B微丝C纤毛D微绒毛E张力丝 第十三章关于基膜描述哪项是错误?动力学主要仿真软件
弹簧阻尼系统动力学模型adams仿真设计
弹簧阻尼系统动力学模型ams仿真修订稿
组织学与胚胎学实验报告
新一代动力学仿真软件Motionview
组织学与胚胎学试题(带答案)
相关主题
文本预览