
《动力学I 》第一章 运动学部分习题参考解答
1-3 解:
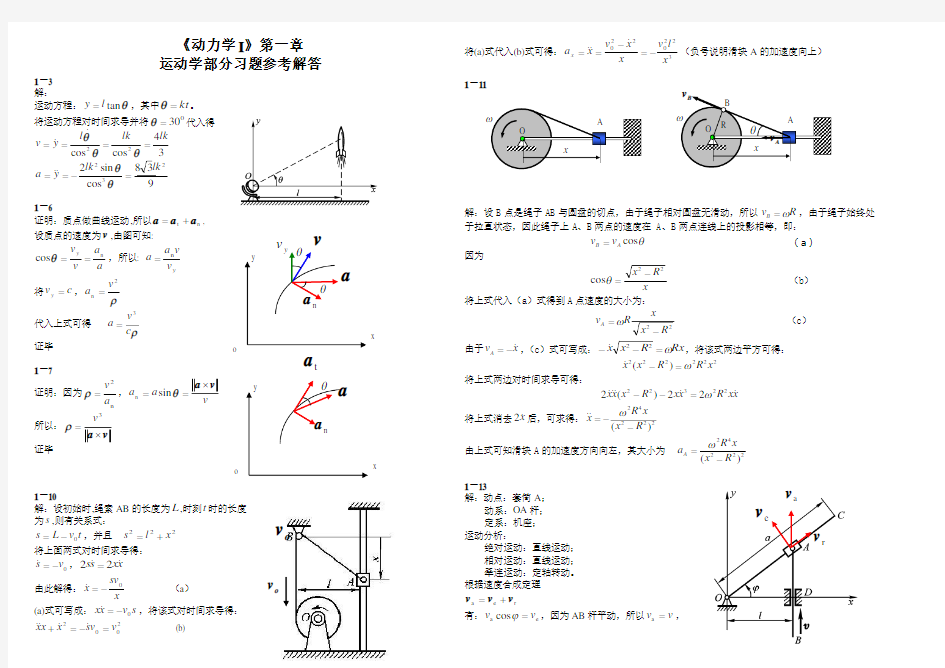
运动方程:θtan l y =,其中kt =θ。 将运动方程对时间求导并将0
30=θ代入得
34cos cos 22lk lk l y v ====θ
θθ
938cos sin 22
3
2lk lk y a =-==θ
θ
1-6
证明:质点做曲线运动,所以n t a a a +=, 设质点的速度为v ,由图可知:
a a v v y
n cos ==θ,所以: y
v v
a a n =
将c v y =,ρ
2
n v a =
代入上式可得 ρ
c v a 3
=
证毕 1-7
证明:因为n
2
a v =ρ,v a a v a ?==θsin n
所以:v
a ?=
3
v
ρ 证毕
1-10
解:设初始时,绳索AB 的长度为L ,时刻t 时的长度 为s ,则有关系式:
t v L s 0-=,并且 222x l s +=
将上面两式对时间求导得: 0v s
-= ,x x s s 22= 由此解得:x
sv x
-= (a ) (a)式可写成:s v x x 0-= ,将该式对时间求导得: 2
02
v v s x x x =-=+ (b) 将(a)式代入(b)式可得:32
20220x
l
v x x v x a x -=-==
(负号说明滑块A 的加速度向上)
1-11
解:设B 点是绳子AB 与圆盘的切点,由于绳子相对圆盘无滑动,所以R v B ω=,由于绳子始终处
于拉直状态,因此绳子上A 、B 两点的速度在 A 、B 两点连线上的投影相等,即: θcos A B v v = (a ) 因为
x
R x 2
2cos -=
θ (b ) 将上式代入(a )式得到A 点速度的大小为: 2
2
R
x x R
v A -=ω (c )
由于x v A -=,(c )式可写成:Rx R x x
ω=--22 ,将该式两边平方可得: 222222)(x R R x x
ω=- 将上式两边对时间求导可得:
x x R x x R x x
x 2232222)(2ω=-- 将上式消去x
2后,可求得:2
22
42)
(R x x
R x --=ω
由上式可知滑块A 的加速度方向向左,其大小为 2
22
42)
(R x x
R a A -=ω
1-13
解:动点:套筒A ;
动系:OA 杆; 定系:机座; 运动分析:
绝对运动:直线运动; 相对运动:直线运动; 牵连运动:定轴转动。 根据速度合成定理 r e a v v v +=
有:e a cos v v =?,因为AB 杆平动,所以v v =a ,
o v
o v
a v
e v
r v
x
o
v
x
o t
由此可得e cos v v =?,OC 杆的角速度为OA v e =ω,?cos l
OA =,所以l v ?ω2cos =
当0
45=?时,OC 杆上C 点速度的大小为l
av
l av a v C 245cos 02===ω
1-15
解:动点:销子M
动系1:圆盘 动系2:OA 杆 定系:机座; 运动分析:
绝对运动:曲线运动 相对运动:直线运动 牵连运动:定轴转动
根据速度合成定理有
r1e1a1v v v +=, r2e2a2v v v +=
由于动点M 的绝对速度与动系的选取无关,即a1a2v v =,由上两式可得:
r1e1v v +r2e2v v +=
(a)
将(a )式在向在x 轴投影,可得:
0r20e20e130cos 30sin 30sin v v v +-=-
由此解得:
s m b OM v v v /4.0)93(30
cos 30sin )(30tan )(30tan 0
20120
e1e20r2-=-=-=-=ωω 32.02e2==ωOM v
s m v v v v M /529.022r 2
e2a2=+==
1-17
解:动点:圆盘上的C 点;
动系:OA 杆; 定系:机座;
运动分析:绝对运动:圆周运动;
相对运动:直线运动(平行于O 1A 杆); 牵连运动:定轴转动。 根据速度合成定理有
r e a v v v += (a )
将(a )式在垂直于O 1A 杆的轴上投影以及在O 1C 轴上投影得:
0e 0a 30cos 30cos v v =,0e 0a 30sin 30sin v v =
ωR v v ==a e ,ωR v v ==r a ,ωωω5.02O 1e 1===R
R A
v
根据加速度合成定理有
C a a a a a +++=r n
e t e a (b )
将(b )式在垂直于O 1A 杆的轴上投影得
C a a a a -+=-0n e 0t e 0a 30sin 30cos 30sin
其中:2a ωR a =,2
1n e 2ωR a =,r 12v a C ω=
由上式解得:2
t e 112
32R ωα==
a
1-19
解:由于ABM 弯杆平移,所以有
M A M A a a v v ==.,
取:动点:套筒M ;
动系:OC 摇杆; 定系:机座; 运动分析:
绝对运动:圆周运动; 相对运动:直线运动; 牵连运动:定轴转动。 根据速度合成定理
r e a v v v +=
可求得:m/s 2222e a =====ωb v v v v A M ,m /s 2e
r ===ωb v v ,
rad/s 3
3
45.12211===A O v A ω
根据加速度合成定理
C a a a a a a +++=+r n e
t e n a t
a
将上式沿C a 方向投影可得:
C a a a a +-=-t e
n a
t a
45sin 45cos
由于221n a m/s 8==l a ω,2t e m/s 1==b a α,2
r m/s 82==v a C ω,根据上式可得: 0t a 45
cos 247+=a ,2
t a 1rad/s 123)247(22≈+==l a α
1-20
解:取小环为动点,OAB 杆为动系
运动分析
绝对运动:直线运动; 相对运动:直线运动; 牵连运动:定轴转动。 由运动分析可知点的绝对速度、相对速度和牵连速度的方向如图所示, 其中:ωω
ωr r OM v 260cos 0
e ==
=
根据速度合成定理: r e a v v v +=
可以得到:
ωωθr r v v 3260cos 60sin tan 020e a === ,ωr v v 460cos 0
e
r
== t
a a
n
a
a
t e a
n
e a
r
a C
a a v
e v
r v
e1v
e2v
r2
v
r1v
x
B r v t e a
r
a v e v
r v
加速度如图所示,其中:
2
2
2
e 260
cos ωωωr r OM a ===, 2r 82ωωr v a C ==
根据加速度合成定理:
C a a a a ++=r e a
将上式在'x 轴上投影,可得:C a a a +-=θθcos cos e a ,
由此求得:2
a 14ωr a =
1-21
解:求汽车B 相对汽车A 的速度是指以汽车 A 为参考系观察汽车B 的速度。 取:动点:汽车B ; 动系:汽车A (O x’y’);
定系:路面。
运动分析
绝对运动:圆周运动;
相对运动:圆周运动;
牵连运动:定轴转动(汽车A 绕O 做定轴转动) 求相对速度,根据速度合成定理 r e a v v v +=
将上式沿绝对速度方向投影可得:
r e a v v v +-= 因此 a e r v v v += 其中:A
A
B B R v R v v v =
==ωω,,e a , 由此可得:m/s 9
380r =+=
B A A B v v R R v 求相对加速度,由于相对运动为圆周运动,
相对速度的大小为常值,因此有:
22r n
r r m/s 78.1===B
R v a a
2-1 解:当摩擦系数f 足够大时,平台AB 相对地面无滑动,此时摩擦力N fF F ≤
取整体为研究对象,受力如图, 系统的动量:r 2v p m =
将其在x 轴上投影可得:bt m v m p x 2r 2==
根据动量定理有:
g m m f fF F b m t p N x
)(d d 212+=≤== 即:当摩擦系数g
m m b
m f )(212+≥时,平台AB 的加速度为零。
当摩擦系数g
m m b
m f )(212+<
时,平台AB 将向左滑动,此时系统的动量为:
v v v p 1r 2)(m m ++=
将上式在x 轴投影有:v m m bt m v m v v m p x )()()(2121r 2+-=-++-=
根据动量定理有:
g m m f fF F a m m b m t
p N x
)()(d d 21212+===+-= 由此解得平台的加速度为:fg m m b
m a -+=
2
12(方向向左)
2-2 取弹簧未变形时滑块A 的位置为x 坐标原点,取整体为研究对象,受力如图所示,其中F 为作用在滑块A 上的弹簧拉力。系统的动量为:
)(r 111v v v v v p ++=+=m m m m 将上式在x 轴投影: )cos (1?ωl x m x m p x ++= 根据动量定理有:
kx F l m x
m m t
p x
-=-=-+=?ωsin )(d d 211 系统的运动微分方程为:t l m kx x m m ωωsin )(211=++
2-4 取提起部分为研究对象,受力如图(a)所示,提起部分的质量为vt m ρ=,提起部分的速度
为v ,根据点的复合运动可知质点并入的相对速度为r v ,方向向下,大小为v (如图a 所示)。
(a ) (b)
根据变质量质点动力学方程有:
v vt t t
m
m t t m ρρr r )()(d d )(d d v g F v g F v ++=++=
将上式在y 轴上投影有:
)()()()(d d 2r v vgt t F v v g vt t F t
v
m
+-=--=ρρρ 由于
0d d =t
v
,所以由上式可求得:)()(2v vgt t F +=ρ。 再取地面上的部分为研究对象,由于地面上的物体没有运动,并起与提起部分没有相互作用力,因此地面的支撑力就是未提起部分自身的重力,即:g vt l F N ρ)(-=
3-5 将船视为变质量质点,取其为研究对象,
受力如图。根据变质量质点动力学方程有:
O
B
r a O
x’
y’ ω
e v
a v
r v
O
x’
y’
ω
n r a
N F
g m g 1m F
v r v
v
r v
N F F g 1m
g 2m
x
v
r v g m )(t F y N F N F
v
N t
m m t m
F v g F v +++=d d d d r 船的质量为:qt m m -=0,水的阻力为v F f -=
将其代入上式可得:
N q m f t
qt m F v g v v
+-+-=-r 0d d )
( 将上式在x 轴投影:)(d dv
)(r 0v q fv t
qt m ---=-。应用分离变量法可求得
c qt m q
f
fv qv +-=-)ln()ln(0r
由初始条件确定积分常数0ln )ln(m q
f
qv c r -=,并代入上式可得:
???
?????
--=q f
m qt m f qv v )(
100r
2-8 图a 所示水平方板可绕铅垂轴z 转动,板对转轴的转动惯量为J ,质量为m 的质点沿半径为
R 的圆周运动,其相对方板的速度大小为u (常量)
。圆盘中心到转轴的距离为l 。质点在方板上的位置由?确定。初始时,0=?,方板的角速度为零,求方板的角速度与?角的关系。
解:取方板和质点为研究对象,作用在研究对象上的外力对转轴z 的力矩为零,因此系统对z 轴的动量矩守恒。下面分别计算方板和质点对转轴的动量矩。 设方板对转轴的动量矩为1L ,其角速度为ω,于是有
ωJ L =1
设质点M 对转轴的动量矩为2L ,取方板为动系,质点M 为动点,其牵连速度和相对速度分别为r e ,v v 。相对速度沿相对轨迹的切线方向,牵连速度垂直于OM 连线。质点M 相对惯性参考系的绝对速度
r e a v v v +=。它对转轴的动量矩为
)()()(r 2e 2a 22v v v m L m L m L L +==
其中:
ω??ω])sin ()cos [()(222e 2R R l m mr m L ++==v
r 2r r 2sin cos )cos ()(v mR v R l m m L ???++=v
系统对z 轴的动量矩为21L L L +=?。初始时,u v ===r ,0,0?ω,此时系统对z 轴的动量矩为
u R l m L )(0+=
当系统运动到图8-12位置时,系统对z 轴的动量矩为
mu
R l m lR R l J u
mR u R l m R R l m J L )cos (])cos 2([sin cos )cos (])sin ()cos [(2
2
222+++++=++++++=?ω????ω??ω?
由于系统对转轴的动量矩守恒。所以有0L L =?,因此可得:
mu R l m lR R l J u R l m )cos (])cos 2([)(22+++++=+?ω?
由上式可计算出方板的角速度为
)
cos 2()cos 1(2
2??ωlR R l m J u
ml +++-=
2-11 取链条和圆盘为研究对象,受力如图(链条重力未画),设圆盘的角速度为ω,则系统对O 轴的动量矩为:
ωπρω2)2(r r a J L l O O ++=
根据动量矩定理有:
gr
x a gr x a r r a J t
L l l l O O
)()(])2([d d 2--+=++=ρρω
πρ 整理上式可得:
gr x r r a J l l O )2(])2([2ρω
πρ=++ 由运动学关系可知:x r =ω,因此有:x
r =ω。上式可表示成: x gr x
r r a J l l O 222])2([ρπρ=++ 令2
22
)2(2r
r a J gr l O l πρρλ++=,上述微分方程可表示成:02
=-x x λ ,该方程的通解为: t t e c e c x λλ-+=21
根据初始条件:0,,00===x
x x t 可以确定积分常数2
021x
c c ==,于是方程的解为: t x x λch 0=
系统的动量在x 轴上的投影为:x
r r r r p l l l x ρωρθθρωπ
22d sin 0
2===?
系统的动量在y 轴上的投影为:x
x r x r x a r x a p l l l l y ρωρωρωρ22)()(=-=+--= 根据动量定理:
g r a P F p
F p
l y y x x )2(00πρ+--==
由上式解得:t rx F l Ox λλρch 220=,t)ch(24)2(2
02λλρπρx g r a P F l l oy -++=
2-14
取整体为研究对象,系统的动能为:
222
121C C A v m mv T +=
其中:C A v v ,分别是AB 杆的速度和楔块C 的速度。 若r v 是AB 杆上的A 点相对楔块C 的速度,则根据 复合运动速度合成定理可知:θtan C A v v =,
y O F
Ox F
P
ω g m
C v
A v
r v
因此系统的动能可表示为:2
2222)cot (2
1cot 2121
A C A C A v m m v m mv T θθ+=+=,系统在能够过程
中,AB 杆的重力作功。根据动能定理的微分形式有:W T δ=d ,系统的动力学方程可表示成:
t mgv v v m m v m m A A A C A C d d )cot ()cot (21d 222=+=??????+θθ 由上式解得:θ
2cot d d C A A m m mg
t v a +==,θcot A C a a =
2-17 质量为0m 的均质物块上有一半径为R 的半圆槽,放在光滑的水平面上如图A 所示。质量为
)3(0m m m =光滑小球可在槽内运动,初始时,系统静止,小球在A 处。求小球运动到B 处030
=?时相对物块的速度、物块的速度、槽对小球的约束力和地面对物块的约束力。
图
解:取小球和物块为研究对象,受力如图B 所示,由于作用在系统上的主动力均为有势力,水平方向无外力,因此系统的机械能守恒,水平动量守恒。设小球为动点,物块为动系,设小球相对物块的速度为r v ,物块的速度为e v ,则系统的动能为
])cos ()sin [(2
1
2121212r 2r e 2e 02a 2e 0??v v v m v m mv v m T +-+=+=
设0=?为势能零点,则系统的势能为
?sin mgR V -=
根据机械能守恒定理和初始条件有0=+V T ,即
???sin ])cos ()sin [(2
1
232r 2r e 2e mgR v v v m mv =+-+
系统水平方向的动量为:
)sin (r e e 0?v v m v m p x -+=
根据系统水平动量守恒和初始条件有
0)sin (3r e e =-+?v v m mv
由此求出?sin 4
1r e v v =,将这个结果代入上面的机械能守恒式,且0
30=?最后求得:
15
21,154e r gR
v gR v ==
下面求作用在小球上的约束力和地面对物块的约束力。分别以小球和物块为研究对象,受力如图C ,D 所示。设小球的相对物块的加速度为r a ,物块的加速度为e a ,对于小球有动力学方程
g F a a a a m m m +=++=)(t r n r e a (a )
对于物块,由于它是平移,根据质心运动动力学方程有
N F g F a ++=0e 0m m (b )
将方程(a )在小球相对运动轨迹的法线方向投影,可得
??sin )cos (e n r mg F a a m -=-
其中相对加速度为已知量,R
v a 2
r n r
=。将方程(b )在水平方向和铅垂方向投影,可得
?
?
sin 0cos 0e 0F g m F F a m N --==
领0
30=?,联立求解三个投影可求出
mg F mg F g a N 6267.3,75
94
,153472
e ===
2-18 取小球为研究对象,两个小球对称下滑, 设圆环的半径为R 。每个小球应用动能定理有:
)cos 1()(2
12θθ-=mgR R m (a ) 将上式对时间t 求导并简化可得:
θθ
sin R
g = (b ) 每个小球的加速度为
j
i a
a a )cos sin ()sin cos (22n t
θθθθθθθθ R R R R m
m --+-=+=
取圆环与两个小球为研究对象,应用质心运动定理
∑∑=i i F a
C
i
m
将上式在y 轴上投影可得:
g m mg F R R m m N 0
202)cos sin (20--=+-?θθθθ 将(a),(b)两式代入上式化简后得
)sin 2cos 3(220θθ-+=mg g m F N
0=N F 时对应的θ值就是圆环跳起的临界值,此时上式可表示成
02cos 2cos 30
2=+
-m
m θθ t m
a
n m
a
g m g m N F
g 0m
上述方程的解为:,)23131
31(cos 0m
m -±=θ 圆环脱离地面时的θ值为???
? ??-+=m m 2313131arccos 01θ 而???
? ??--=m m 2313131arccos 02θ也是方程的解,但是1θθ>时圆环已脱离地面,因此2θθ=不是圆环脱离地面时的值。
2-19 取圆柱、细管和小球为研究对象。作用于系统上的外力或平行于铅垂轴或其作用线通过铅垂轴。根据受力分析可知:系统对铅垂轴的动量矩守恒。设小球相对圆柱的速度为r v ,牵连速度为
e v 系统对z 轴的动量矩守恒,有:
0cos r e 20=+--=r mv r mv r m L z θω
其中:ωr v =e ,则上式可表示成:
r mv r m m θωcos )(r 20=+
由此解得:r v r m m mv θ
μθωcos )(cos r 0r =+=
其中:m m m +=0μ,r
h
πθ2tan =
根据动能定理积分式,有:∑-=
-2
112W
T T
W mv r m T T =+=
=∑-212a 220212
1
21,0ω其中:2
r 2r e 2a )sin ()cos (θθv v v v +-=,将其代入动能定理的积分式,可得:
mghn v v r m r m 2])sin ()cos [(2r 2r 220=+
-+θθωω
将r
v θ
μωcos r =
代入上式,可求得:θ
μ2r cos 12-=
ghn
v
由2
r 2
r e 2a
)sin ()cos (θθv v v v +-=可求得:2
12
r a ]cos )2(1[θμμ--=v v
2-20 取链条为研究对象,设链条单位长度的质量为ρ 应用动量矩定理,链条对O 轴的动量矩为:
θρπ 3r L O =
外力对O 轴的矩为:
θ
ρρθ??ρρθ?ρρθθ
πθ
πsin d cos d cos 220
20
2gr gr r gr gr s gr gr M r r O +=+=+=?
?
--
θρρθθρπsin 223gr gr r M L O
O +=∴=
因为:θθθθθθ
d d d d d d d d d d v r v v t v t v r ==== ,所以上式可表示成: θθθ
πθθθ
πsin d d sin g g v
r v g g r +=+= θθθπd )sin (d +=rg v v
积分上式可得:c rg v +-=)cos 2
1(212
2θθπ
由初始条件确定积分常数gr c =,最后得:2
12
]/)cos 22([πθθ+-=gr v
动力学第三章部分习题解答
3-3 取套筒B 为动点,OA 杆为动系 根据点的复合运动速度合成定理
r e a v v v += 可得:l v v ω==e 0
a 30cos ,
l v v v BC B ω3
3
2a =
== 研究AD 杆,应用速度投影定理有:
030cos D A v v =,l v D ω3
3
4=
再取套筒D 为动点,BC 杆为动系,根据点的复合运动速度合成定理
r D BC D v v v += 将上式在x 轴上投影有:r D BC D v v v +-=-,l v v v BC D D ω3
3
2r =+-=
3-4 AB 构件(灰色物体)作平面运动, 已知A 点的速度
s A O v A /0cm 4510==ω AB 的速度瞬心位于C ,应用速度瞬心法有:
rad/s 23
==
AC v A AB ω BC v AB B ω=,
设OB 杆的角速度为ω,则有
rad/s 4
15
==OB v B ω
设P 点是AB 构件上与齿轮I 的接触点, 该点的速度:
CP v AB P ω=
v
?
s d g ρ g θρr
a v
e v
r v
A v
D
v
r
D v
v
B
齿轮I 的角速度为:rad/s 61
==
r v P
I ω 3-6 AB 杆作平面运动,取A 为基点 根据基点法公式有:
BA A B v v v +=
将上式在AB 连线上投影,可得
0,01==B O B v ω 因此,04
1
ωω==
AB v A AB 因为B 点作圆周运动,此时速度为零, 因此只有切向加速度(方向如图)。 根据加速度基点法公式
n
t BA BA A B a a a a ++=
将上式在AB 连线上投影,可得
n
060cos BA A B a a a +=-,r a B 205.2ω-=
2
012
31
ωα-==
B O a B B O (瞬时针)
3-7 齿轮II 作平面运动,取A 为基点有
n t BA BA A B a a a a ++=
n t
1BA BA
a
a
a a ++=
将上式在x 投影有:
n
1cos BA a a a -=-β
由此求得:
2
12
n 2cos 2r a a r a
BA
II β
ω+==
再将基点法公式在y 轴上投影有:
2t 2sin r a
a II BA
αβ==,由此求得2
2sin r a II β
α=
再研究齿轮II 上的圆心,取A 为基点
n t n t 222
2
A O A
O A O O a
a
a a
a
++=+
将上式在y 轴上投影有
2sin 2t t 22
β
αa r a a II A
O O ===,
由此解得:)
(2sin 2121t 2
21r r a r r a O O O +=+=βα
再将基点法公式在x 轴上投影有:n
1n 22A O O a a a -=- 由此解得:2
cos 1n 2
a a a
O -=β,又因为2
21n 212)(O O O r r a ω+=
由此可得:)
(2cos 211
21r r a a O O +-±
=βω
3-9 卷筒作平面运动,C 为速度瞬心, 其上D 点的速度为v ,卷筒的角速度为
r
R v
DC v -=
=ω 角加速度为
r
R a
r R v -=
-== ω
α 卷筒O 点的速度为:
r
R vR
R v O -=
=ω O 点作直线运动,其加速度为 r
R aR
r R R v v
a O O -=
-==
研究卷筒,取O 为基点,求B 点的加速度。
n 0t B BO
O B a
a
a a ++=
将其分别在x,y 轴上投影
n
t
BO
By BO
O Bx a a a a a -=+= 4222
22
)(4)
(v r R a r R R a
a
a By
Bx
B +--=+= 同理,取O 为基点,求
C 点的加速度。
n
0t C CO O C a a a a ++=
将其分别在x,y 轴上投影
n
t 0CO
Cy CO O Cx a a a a a ==-= 2
2
)
(r R Rv a a Cy
C -== 3-10 图示瞬时,AB 杆瞬时平移,因此有:
m /s 2===OA v v A B ω
AB 杆的角速度:0=AB ω
圆盘作平面运动,速度瞬心在P 点,圆盘的 的角速度为:m/s 4==
r
v B B ω 圆盘上C 点的速度为:m/s 22==PC v B C ω
AB 杆上的A 、B 两点均作圆周运动,取A 为基点 根据基点法公式有
t
n t BA A B B B a a a a a +=+=
将上式在x 轴上投影可得:0t =-B
a
因此:22n m/s 8===r
v a a B
B
B B v
BA
v
A v
A
a
B
a
t
BA a
n
BA a
t
BA a
n BA a
x
y
t 2A O a
n 2A O a
x
y
n 2
O a
t
2
O a
O
a
v
O
v
ω
B ω
t BA a
t B a
A a
n B
a
A v
B v
B ω
P
C
v
由于任意瞬时,圆盘的角速度均为:r
v B
B =
ω 将其对时间求导有:r
a r v B B B t
== ω,由于0t
=B a ,所以圆盘的角加速度0==B B ω
α 。 圆盘作平面运动,取B 为基点,根据基点法公式有:
n
n t CB B CB CB B C a a a a a a +=++=
2
2n 2n m/s 28)()(=+=CB
B C a a a
3-13 滑块C 的速度及其加速度就是DC 杆的速度 和加速度。AB 杆作平面运动,其速度瞬心为P ,
AB 杆的角速度为:rad/s 1==AP
v
A A
B ω
杆上C 点的速度为:m /s 2.0==PC v AB C ω
取AB 杆为动系,套筒C 为动点, 根据点的复合运动速度合成定理有:
r e a v v v += 其中:C v v =e ,根据几何关系可求得: m/s 15
3
e a =
=v v AB 杆作平面运动,其A 点加速度为零, B 点加速度铅垂,由加速度基点法公式可知
n t n t BA
BA
BA BA
A B a a a a
a a +=++=
由该式可求得2
n m/s 8.030
sin ==BA
B a a 由于A 点的加速度为零,AB 杆上各点加速度的分布如同定轴转动的加速度分布,AB 杆中点的加速度为:2
m/s 4.05.0==B C a a
再去AB 杆为动系,套筒C 为动点, 根据复合运动加速度合成定理有:
C r e a a a a a ++= 其中牵连加速度就是AB 杆上C 点的加速度
即:2
e m/s 4.0=a
将上述公式在垂直于AB 杆的轴上投影有:
C 0
e 0a 30cos 30cos a a a +=
科氏加速度r C 2v a AB ω=,由上式可求得:2a m/s 3
2
=
a
3-14:取圆盘中心1O 为动点,半圆盘为动系,动点的绝对运动为直线运动;相对运动为圆周运动;牵连运动为直线平移。由速度合成定理有: r e a v v v +=
速度图如图A 所示。由于动系平移,所以u v =e , 根据速度合成定理可求出: u v
v u v v v O 2sin ,3tan e r e a 1====
=θ
θ
由于圆盘A 在半圆盘上纯滚动,圆盘A 相对半圆盘 的角速度为: r
u
r v 2r =
=
ω 由于半圆盘是平移,所以圆盘的角速度就是其相对半圆盘的角速度。
再研究圆盘,取1O 为基点根据基点法公式有:
11BO O B v v v +=
u r v v BO Bx -=-=-=0030sin 30sin 1ω
u v v v BO O By 3230cos 011=+=
u v v v By Bx B 132
2=+= 为求B 点的加速度,先求1O
半圆盘为动系,
根据加速度合成定理有 t
r n r e a a a a a ++= (a )
其加速度图如图C 所示,,r
u r R v a 2
n r n r
=+=, 将公式(a )在x 和y 轴上投影可得:
θ
θθθsin cos :
cos sin 0:n r t r a n r t r a a a y a a x --=--=
由此求出:r u
a a r u a O 2
a 2
t
r 2,31===
下面求圆盘上B 点的加速度。取圆盘为研究对象,1O 为基点,应用基点法公式有:
n
t 1
11BO BO O B a a a a ++= (b ) 将(b )式分别在y x ,轴上投影:
0t
0n 0
t 0n 30
cos 30sin 30sin 30cos 1
111
1BO BO O By BO BO Bx a a a a a a a ---=+-=
其中:r u r a BO 2
2
n 41
==ω,
r u r a BO 2t
31==α
由此可得:r
u a B 2
37=
3-15(b ) 取BC 杆为动系(瞬时平移),
套筒A 为动点(匀速圆周运动)。
根据速度合成定理有:
P
t a
n a a
r a
e a
C a
图 C
图 B
1 图 D
a v r v
r e a v v v +=
由上式可解得:r v v ω3
330tan 0
a e == 因为BC 杆瞬时平移,所以有:
r v v CD
ω3
3
e ==
3-15(d ) 取BC 杆为动系(平面运动),
套筒A 为动点(匀速圆周运动)。
BC 杆作平面运动,其速度瞬心为P ,设其角速度为
根据速度合成定理有:
r e a v v v +=
根据几何关系可求出:r CP r P O 3
16
,382==
将速度合成定理公式在x,y 轴上投影::
BC
x y y y BC x x x x A O
v v v v v P O v v
v v ωω2r e r e a 2e r e a +==+=-==+=
由此解得:r v r BC ωωω)2
3
23(,41+
== DC 杆的速度r CP v BC C ωω3
4
==
3-16(b) BD 杆作平面运动,根据基点法有:
n t n t n t
CB CB
B B CB
CB
B C a
a
a a a
a
a a +++=++=
由于BC 杆瞬时平移,0=BC ω,上式可表示成:
t
n t CB B B C a a a a ++=
将上式在铅垂轴上投影有:
t n
30sin 0CB
B a
a +-=
由此解得:26
1ωα=BC
再研究套筒A,取BC 杆为动系(平面运动),套筒A 为动点(匀速圆周运动)。
K r e a a a a a a ++==A (a)
其中:K a 为科氏加速度,因为0=AB ω,所以0K =a 动点的牵连加速度为: t e n e e C
C
C a a
a a ++=
由于动系瞬时平移,所以0n e =C a ,AC a BC C α=t
e 牵连加速度为t
e e C C a a a +=,(a)式可以表示成
r t e a a a a a a ++==C C A
将上式在y 轴上投影:
t e 0
030cos 30cos C
C A a a a +-=-
由此求得:r a C 2
)9
321(ω+
=
3-16(d) 取BC 杆为动系,套筒A 为动点, 动点A 的牵连加速度为
n t e AC
AC
C a
a
a a ++=
动点的绝对加速度为
K AC AC C a a a a a a ++++=r n
t a
其中K a 为动点A 的科氏加速度。 将上式在y 轴上投影有
K AC C a a a a +--=t
00a 30cos 30cos
上式可写成
r 002230cos 30cos v AC a r BC BC C ?+?--=ωαω (a)
其中:r v r BC ωωω)2
3
23(,41+==
(见3-15d )BC α为BC 杆的角加速度。 再取BC 杆上的C 点为动点,套筒2O 为动系,由加速度合成定理有
K C '''r e aC a a a a a ++==
其中n
t e 22'CO CO a a a +=,上式可表示为 K CO CO C ''r n t 22
a a a a a +++= 将上式在y 轴投影有:K CO C a a a '30cos t 0
2
-=-
该式可表示成:
02030sin 230cos C BC BC C v CO a ωα-?=- (b )
联立求解(a),(b)可得
2
28
3,934ωαω==
BC C r a
3-17 AB 杆作平面运动,其速度瞬心位于P , 可以证明:任意瞬时,速度瞬心P 均在以O 为 圆心,R 为半径的圆周上,并且A 、O 、P 在同 一直径上。由此可得AB 杆任何时刻的角速度均 为
R
v
AP v A A AB 2==
ω 杆上B 点的速度为:A AB B v PB v 22==ω AB 杆的角加速度为:0===AP
v
A A
B AB ω
α 取A 为基点,根据基点法有
n
t n BA A BA BA A B a a a a a a +=++=
将上式分别在x,y 轴上投影有
C
v
t CB a
n B a
t B a
BC α
A a
t e C
a
r a
C
a
y
B v
P
O
R
A a
n BA a
y
a a
K a
C
a
r a
y x BC α
t
AC
a
n
AC a
K
'a
C
a
r
'a
y x
BC α
t 2
CO a
n 2
CO a
4345sin 4
45cos 20
n 20
n A
BA
A By A
BA
Bx v
a a a v a
a =
-==
-=
R
v a a a A By Bx B 41022
2=+=
3-18 取DC 杆上的C 点为动点,构件AB 为动系
r e a C C C v v v += 根据几何关系可求得:r v v C C ω3r e =
=
再取DC 杆上的D 点为动点,构件AB 为动系
r e a D D D v v v += 由于BD 杆相对动系平移,因此r r D C v v = 将上式分别在x,y 轴上投影可得
r
v v r
v v v D y
D D D x D ωω2
3
30cos 23
30sin 0r a 0
r e a -=-=-=+-=
求加速度:研究C 点有
K r e a C C C C C a a a a a ++==
将上式在y 轴投影有
K 0
r 0e 30sin 30cos 30sin 0C C C a a a +-=
由此求得r a C 2
r 3ω=
再研究D 点
K r e a D D D D D a a a a a ++==
由于BD 杆相对动系平移,因此r r D C a a = 将上式分别在x,y 轴上投影有
a a a a r
a a a D D D D D D D 0K 0r e
ay 20
K 0
r ax
2
3330sin 30cos 2
9
30cos 30sin ω-=+--==+=
3-21 由于圆盘纯滚动,所以有
αr a C = 根据质心运动定理有:
mg
F F F F ma N S C -+=-=θθsin 0cos
根据相对质心的动量矩定理有
02Fr r F m S -=αρ
求解上式可得:
)
()
cos (220ρθ+-=
r m r r Fr a C ,θ
sin F mg F N -=
2
202)
cos (ρ
θρ++=r rr F F S 若圆盘无滑动,摩擦力应满足N S fF F ≤,由此可得:
当:θsin F mg >时,min 2
202)
)(sin ()
cos (f r F mg rr F f =+-+≥ρθθρ
3-22 研究AB 杆,BD 绳剪断后,其受力如图所示, 由于水平方向没有力的作用,根据质心运动定理可知 AB 杆质心C 的加速度铅垂。 由质心运动定理有:
AN C F mg ma -=
根据相对质心的动量矩定理有:
?αcos 2
1212l
F ml AN AB = 刚体AB 作平面运动,运动初始时,角速度为零。
A 点的加速度水平,A
B 杆的加速度瞬心位于P 点。 有运动关系式
?αcos 2
l
a AB
C = 求解以上三式可求得:
mg F AN
5
2=
3-35 设板和圆盘中心O 的加速度分别为 O a a ,1,圆盘的角加速度为α,圆盘上与板 的接触点为A ,则A 点的加速度为
n
t AO AO O A a a a a ++=
将上式在水平方向投影有
1t
a R a a a a O AO O xA =+=+=α (a )
取圆盘为研究对象,受力如图,应用质心运动定理有
22F a m O = (b) 应用相对质心动量矩定理有
R F R m 2222
1
=α (c)
再取板为研究对象,受力如图,应用质心运动定理有
211F F F a m S --= (d ) 作用在板上的滑动摩擦力为:
e
D v
r
D v
y
y
a
C a
CK
r D a
DK a
e D a
α
C a
g
m
AN
F
C
a
g
2m 2
O
a
t
AO a
1a
α
n AO a
A
R
g m m f fF F N S )(21+== (e)
由上式可解得:
2
12113)(33m m g m m f F a ++-=
3-29
解:由于系统在运动过程中,只有AB 杆的重力作功,因此应用动能定理,可求出有关的速度和加速度。系统运动到一般位置时,其动能为AB 杆的动能与圆盘A 的动能之和:
2
2222122
1212121A
A A A
B
C C J v m J v m T ωω+++= 其中:
,
sin ,sin sin ,
2
,R
l R v l l v l
v A A AB A C AB θ
θωθθθωθθω -==-==-=-=
因此系统的动能可以表示成:
θθθθθθθθθ222222122222221212sin 4
3
61sin 221)sin (211221221 l m l m R l R m l m l m l m T +=
???? ??+++???? ??=
系统从0
45=θ位置运动到任意θ角位置,
AB 杆的重力所作的功为:
)sin 45(sin 20121θ-
=→l
g m W
根据动能定理的积分形式 2112→=-W T T 初始时系统静止,所以01=T ,因此有
)sin 45(sin 2
sin 4361012222221θθθθ-=+l g m l m l m 将上式对时间求导可得:
θθθθθθθθθθ cos 2cos sin 23sin 2331132222221l g m l m l m l m -=++ 将上式中消去θ 可得: θθθθθθθcos 2sin cos 23sin 2331122222221l g m l m l m l m -=++ 根据初始条件045,0==θθ
,可求得初始瞬时AB 杆的角加速度 l
m m g m )94(23211+-=θ 因为0<θ
,所以AB 杆的角加速度为顺时针。初始瞬时AB 杆的角速度为零,此时AB 杆的加速度瞬心在a c 点,由此可求出AB 杆上A 点的加速度:
)
94(345cos 45sin 21100m m g
m l l a AB A +=
-==θα
3-33 设碰撞后滑块的速度、AB 杆的角速度如图所示 根据冲量矩定理有:
I v m v m C A =+21 (a) 其中:C v 为AB 杆质心的速度,根据平面运动关系有
AB A C l
v v ω2
+= (b)
再根据对固定点的冲量矩定理:)(I A A M L =
系统对固定点A (与铰链A 重合且相对地面不动的点)的动量矩为滑块对A 点的动量矩和AB 杆对A
点的动量矩,由于滑块的动量过A 点,因此滑块对A 点无动量矩,AB 杆对A 点的动量矩(也是系统对A 点的动量矩)为
AB C
A l m l v m L ω22212
1
2+= 将其代入冲量矩定理有:
lI l m l v m AB C
=+ω22212
1
2 (c) 由(a,b,c )三式求解可得:2
92m I
v A -= (滑块的真实方向与图示相反)
3-34 研究整体,系统对A 轴的动量矩为:
)()(BC A AC A A L L L += 其中:AC 杆对A 轴的动量矩为AC AC A ml L ω2)
(3
1
= 设1C 为BC 杆的质心,BC 杆对A 轴的动量矩为
bC C BC A ml l mv L ω2)(12
1
231+=
BC AC C C C C l
l v v v ωω2
11+=+=
根据冲量矩定理 I l L A 2=可得:
lI ml ml BC AC 26
5
61122=+ωω (a ) 再研究BC 杆,其对与C 点重合的固定点的动量矩为
BC AC BC C C ml ml ml l mv L ωωω2223
1
2112121+=+=
根据冲量矩定理I l L C =有: lI ml ml BC AC =+ωω223
1
21 (b ) 联立求解(a ),(b) 可得2rad/s 5.276-=-=ml
I
AC ω
A
ω θ
A v
C v
AB
ω
P
g 1m a c
A a
A v
AB
ω
C
v
C
AC ω
BC ω
1
C v
C
v
Ay I
Ax I
1
C C
3-35 碰撞前,弹簧有静变形k
mg
st =δ
第一阶段:3m 与1m 通过完全塑性碰撞后一起向下运动,
不计常规力,碰撞前后动量守恒,因此有:
gh m v m m 2)(33!=+
碰撞结束时两物体向下运动的速度为2
2gh
v =
第二阶段:3m 与1m 一起向下运动后再回到碰撞结束时 的初始位置,根据机械能守恒可知:此时的速度向上, 大小仍然为
2
2gh v =
第三阶段:3m 与1m 一起上升到最高位置,此时弹簧
被拉长λ。根据动能定理2
112→∑=
-W
T T 有:
22312312
2)()()(210λδλδk k g m m v m m st st -+++-=+-
上式可表示成:
2222222
22322)(22λλλλk
mg k g m k k g m
k mg mg mgh ++=+-+= 若使2m 脱离地面,弹簧的拉力必须大于其重力,因此有k mg >λ,将k
mg
=λ代入上式求得:
k mg h 8=。若k mg >λ,则k
mg
h 8> 注:上述结果是在假设3m 与1m 始终粘连在一起的条件下得到的,若3m 与1m 之间没有粘着力,答
案应为k
mg
h 9>,如何求解,请思考。
3-36 取AB 杆为研究对象,初始时,杆上的A 点 与水平杆上的O 点重合,当-
=0t 时系统静止,+
=0t AB 杆上A 点的速度为v ,角速度为ω,初始时受到 冲击力的作用,应用对固定点O 的冲量矩定理可得
0)2(12
1
2=+=ωl m l mv L C O
其中:ωωl v l v v A C -=-=
由此解得l
v
43=ω
当0>t 时,滑块A 以加速度a 向右运动,
取AB 杆为研究对象,应用相对动点A
θθ
θsin cos )2(3
12mg mal l m -= 将上式积分并简化可得:
C g a l ++=θθθcos sin 3
22
其中C 是积分常数由初始条件ωθ
θ== ,0确定出g l
v C -=832。上式可表示成 )(83cos sin 3222θθθθf g l
v g a l =-++= 若AB 杆可转动整圈,则应有02>θ
,因此0)(>θf 。若)(θf 的最小值大于零,则AB 杆就可以完成整圈转动。下面求)(θf 的极值。
g l
v g a f -++=83cos sin )(2
θθθ
将上式求导令其为零有0sin cos )('=-=θθθg a f 求得极值点为g
a =*
tan θ 当2
2*2
2*cos ,sin g a g
g a a +=
+=
θθ, 函数)(*
θf 取最大值
当2
2*22*cos ,sin g a g g a a
+-
=+-=θθ, 函数)(*
θf 取最小值,若使最小值大于零,则有
083833222222222222>-++-=-++-+-=g l v g a g l v g
a g g a a l θ
由此求得)(832
2
2
g a g l v ++>
动力学第四章部分习题解答
4-6 图示瞬时,AB 杆的加速度瞬心位于P 点, 设其角加速度为AB α,则质心加速度为:
2l
CP a AB AB C αα==
2
l
m ma F AB C CI α==
AB CI ml M α212
1
=
根据动静法有:
∑=0P
M 02c o s 2=++CI CI M l
F l mg θ 2rad/s 528.3cos 23==θαl
g
AB
∑=0y
F 0c o s =+-θCI A F mg F N 7.357)cos 4
3
1(2=-=θmg F A 3m
st δ
v
B F
A
F
P
CI F
CI
M
C a
AB
g
m
∑=0x
F 0s i n =-B CI F F θ N 4.176cos sin 4
3
==θθmg F B
4-7 (1)取AB 杆和滑块C 为研究对象 AB 杆平移,质心加速度如图所示
C I ma F = 根据动静法有:
∑=0x
F
030sin 0=-I F mg
g g a C 5.030sin 0
==
(2)滑块C 无水平方向的作用力, 其加速度铅垂向下,AB 杆平移, 其加速度垂直于AD ,如图所示。 两者加速度的关系为
30sin A C a a =
C AB A AB ABI C C CI m m m a m F a m F +===,,
根据动静法有
∑=0x F 030sin 30sin 00=--CI ABI F F mg
由此求得:g a g a C A 625.0,25.1==
(3) 先研究滑块C
根据约束可知:0
30sin A Cy a a =
Cy C CIy Cx C CIx a m F a m F ==,
根据动静法有:
∑=0x
F 0=-C I x F F Cx C a m F = ∑=0y
F
0=-+g m F F C C I y N
030sin A C C N a m g m F -=
因为:N fF F =,所以有关系式
)30sin (0A C C Cx C a m g m f a m -=
即: )30sin (0
A Cx a g f a -=
再研究整体,应用动静法有
∑=0'
x F
00030cos 30sin 30sin CIx CIy ABI F F F mg ++=
上式可表示成:
2030cos )30sin (30
sin 30sin A C A C A AB a g f m a m a m mg -++=
由上式解得:2
m /s 64.66776.0==g a A
20m/s 24.3)30sin (=-=A Cx a g f a ,
20m/s 32.330sin ==A Cy a a ,
2m/s 64.4=C a
4-8 (1)研究AB 杆,将惯性力向杆的质心简化,
r m F I 222
n ω= r m F I 22
t α=
α2)2(121
r m M I =
根据动静法有:
∑=0A M 022n
=--r F M r F B I I , N 286.14)3(6
1
2=-=αωmr F B ∑=0x
F 045cos 45cos 0
t 0n =+-I I Ax F F F N 122.6)(2
12=-=αωmr F Ax ∑=0y F 045sin 45sin 0t 0n =-++B I I Ay F F F F , N 33.16-=Ay F
(2)若0>B F ,必有αω>23,因此当2
rad/s 6=α,rad/s 2>ω
4-9 设OA 杆和AB 杆的角加速度分别为
AB OA αα,
。将各杆的惯性力向各自质心简化。 ),2
(,221l l
m F l m F OA AB I OA I ααα+==
,12
1
,1212221AB I OA I ml M ml M αα==
研究整体,根据动静法有:
∑=0O
M
,
02
322322121=++--+I I I I M M l
mg l mg l F l F
研究AB 杆,根据动静法有:
∑=0A
M 02
222=+-I I M l mg l F 上述平衡方程可简化为
g l l g l l AB OA AB OA 2
1312126
5
611=+=+αααα
求解该方程组可得:l
g
l g AB OA 73,79-==
αα C a B F
A a
I F
A F
g m
x
A
a
B F
A a
A F
g m
x
C
a
CI F
ABI F
A a
x
Cx a
Cy a B F
'x
I
M
B F
Ax F
n I F
Ay F
t I F
OA α
I2M
I1M
g m
g m AB α
Oy F 1I F Ox F 2I F
I2M
g m
AB α
Ay F
Ax F
2I F
4-10 取圆盘A的角加速度为θ
C,其加速度为
n
t
CA
CA
A
C
a
a
a
a+
+
=
将惯性力分别向各刚体的质心简化。
作用于AB杆质心C的惯性力为:
n
t
CA
CA
IA
IC
F
F
F
F+
+
=
r
m
F
A
IA
θ
=,
2
t
l
m
F
C
CA
?
=,
2
2
n
l
m
F
C
CA
?
=
θ 2
2
1
r
m
M
A
IA
=,? 2
12
1
l
m
M
C
IC
=
研究整体,
∑=0
P
M(a)
cos
2
)
sin
2
(
cos
)
sin
2
(
t
n
=
-
+
-
+
-
-
+
+
?
?
?
?
l
mg
M
r
l
F
r
F
l
r
F
M
r
F
IC
CA
CA
IA
IA
IA
研究AB杆,
∑=0
A
M(b)
cos
2
2
sin
2
t=
-
+
+
-?
?
l
mg
M
l
F
l
F
IC
CA
IA
将(a)-(b)得:0
sin
cos t
n=
-
-
+
+?
?r
F
r
F
r
F
M
r
F
CA
CA
IA
IA
IA
上式化简为0
s i n
2
1
c o s
2
1
2
52
2=
-
-?
?
?
?
θ
m l r
m l r
mr
还可写成:0
s i n
c o s
52=
-
-?
?
?
?
θ
l
l
r
即:0
)
sin
5(
d
d
=
-?
?
θ
l
r
t
将上式积分可得:C
l
r=
-?
?
θsin
5
再根据初始条件:0
,0=
=
=?
θ
?
确定0
=
C,由此可得?
?
θsin
5
r
l
=
根据动能定理有:
?
?
θsin
2
1
24
1
2
1
4
1
2
1
2
2
2
2
2
2mgl
l
m
v
m
r
m
v
m
AB
C
AB
A
A
A
=
+
+
+
(C)
其中:,θ
r
v
A
=2
2
2
2
2
4
1
s i n?
?
?θ
θ
l
rl
r
v
C
+
-
=
再利用?
?
θsin
5
r
l
=(c)式可表示成
?
?
?
?sin
sin
10
1
3
1
2
2
2
2
2mgl
ml
ml=
-
(d)
当0
90
=
?,
l
g
AB7
30
|0
90
=
=
=
?
?
ω ,
35
6
5
gl
l
r
v
AB
A
=
=
=ω
θ
再将(d)式求导,然后销去? ,最后可得
?
?
?
?
?
?
?cos
cos
sin
5
1
sin
5
1
3
2
2
2
2
2mgl
ml
ml
ml=
-
-
当0
90
=
?,可求得0
=
=?
α
AB
,
又因为?
?
?
?
θcos
5
sin
5
2
r
l
r
l
+
=,
当AB杆铅垂时,0
=
=θ
α
A
。0
=
=r
a
A
A
α
再取圆盘为研究对象,应用动静法有
∑=0
A
M,,0
=
Fr0
=
F
再研究整体,利用动静法有
∑=0
y
F
2=
-
-
IC
N
F
mg
F
mg
l
m
mg
F
mg
F
AB
IC
N7
29
2
2
22=
+
=
+
=ω
4-12 此瞬时AB杆作瞬时平移,所以
m/s
44
.2
=
=
B
A
v
v
因为AB杆的角速度为零,且A点的加速度为零,
取A为基点,有
t
n
t
BA
BA
BA
A
B
a
a
a
a
a=
+
+
=
又因为B点作圆周运动,所以
t
n
t
BA
B
B
B
a
a
a
a=
+
=
将该式在铅垂轴上投影:
h
v
a
a B
BA
B
2
t
n30
cos=
=
由此解得:2
2
rad/s
85
.1
30
cos
=
=
hl
v
B
AB
α
AB杆质心C的加速度垂直于AB杆,
其大小为:2
m/s
817
.2
2
=
=
l
a
AB
C
α
应用动静法:
AB
IC
ml
Mα2
12
1
=
∑=0
x
F,0
30
sin0=
-F
F
IC
N
64
30
sin
30
sin0
0=
=
=
C
IC
ma
F
F
∑=0
y
F,0
30
cos
2
2
30
cos0
0=
-
-
-
l
mg
l
F
M
l
F
IC
IC
B
,N
321
=
B
F
4-14 图示瞬时,AB杆瞬时平移,其加速度瞬心
t
BA
a
n
a
A
F
IC
M B
F
IC
F
g
m
A
a
位于P 点。设OA 、AB 杆的质心分别为21,C C 。 各点加速度如图所示,其大小为
2
0ωr a A =,
2
002
03330cos 2ωωα===r r AP a A AB
r P C a AB C 20233ωα==,r BP a AB B 2
03
3ωα==
有关的惯性力为:
2
0332222ωmr ma F C IC =
= 2
033ωmr ma F B IB ==
2
022932)2(21212ωαmr r m M AB IC ==
应用动静法和虚位移原理,有
030sin 220=---B B IB C IC r F r F r F M δδδδ?
因为:δ?δδδr r r r A C B ===2,上式可表示成
0)30sin (30sin 0022=---=---δ?δ?δ?δ?δ?Fr r F r F M Fr r F r F M IB IC IB IC
因为0≠δ?,所以 030sin 0
2=---Fr r F r F M IB IC , 由此解得
Fr r m M +=
2
203
32ω 研究AB 杆及滑块B ,
∑=0A
M
30cos 230cos 230cos 230sin 222000=-----+IC IB NB IC M r mg Fr r F mgr r F r F
由此解得:r m F mg F NB 2
09
2332ω++=
1
IC F g m
g
g
Ay F
1.求具有下列机理的某气相反应的速率方程: 1 1k k A B - 2k B C D +??→ B 为活泼物质,可用稳态近似法。证明此反应在高压下为一级。 [参考答案] 稳态近似法的关键是认为活泼中间产物在反应过程中,其浓度不变,即其净速率为零。 设以产物D 的生成速率表示上述复合反应的速率,即 2D B C dc k c c dt = (1) 因B 的活泼物质,其净速率为 112B A B B C dc k c k c k c c dt -=-- 采用稳态近似法,则0B dc dt =,亦即 112A B B C k c k c k c c -=+ 112A B C k c c k k c -=+ (2) 将式(2)代入(1)中,整理得 2112A C D C k k c c dc dt k k c -=+ 所谓高压下,亦即C c ,A c 浓度很大,致使21C k c k -,于是 122C C k k c k c -+≈ 所以 1D A dc k c dt = (一级反应) 2.反应HCl Cl H 222→+的机理为: M Cl M Cl k +?→?+212 H HCl H Cl k +?→?+22 Cl HCl Cl H k +?→?+32 M Cl M Cl k +?→?+242 其中14,k k 分别为Cl 2的速率常数 试证明:112 122224[]2[][]k d HCl k H Cl dt k ??= ??? [参考答案] []]][[]][[2322Cl H k Cl H k dt HCl d += 对H 和Cl 用稳态近似法
有: 0]][[]][[][2322=-=Cl H k Cl H k dt H d 及:21222324[]2[][][][][][]2[][]0d Cl k Cl M k H Cl k H Cl k Cl M dt =-+-= 由此二式可以得出: ]][[]][[2322Cl H k Cl H k = ][][2]][[22421M Cl k M Cl k = 于是:2122 141][][Cl k k Cl ??? ? ??= 所以 2232[][][][][]d HCl k H Cl k H Cl dt =+ ]][[222Cl H k = 21222 1412]][[2Cl H k k k ??? ? ??= 3.若反应22332HNO H O NO H NO +-→+++ 的机理如下,求以-3NO υ????表示的速率方程。 1K 2 222HNO NO+NO H O + (快速平衡) 2K 2242NO N O (快速平衡) 3k 24223N O H O HNO H NO +-+??→++ (慢) [参考答案] []-33242NO k N O H O υ????=???? (1) 因为前两个反应处于快速平衡,所以 [][][][] 22122NO NO H O K HNO = [][][][]21222K HNO NO NO H O = (2) [][] 24222N O K NO = [][]22422N O K NO = (3) 将(2)代入(3)得 [][][][]2 21224222K HNO N O K NO H O ????=?????? (4)
《动力学I 》第一章 运动学部分习题参考解答 1-3 解: 运动方程:θtan l y =,其中kt =θ。 将运动方程对时间求导并将0 30=θ代入得 34cos cos 22lk lk l y v ====θ θθ 938cos sin 22 3 2lk lk y a =-==θ θ 1-6 证明:质点做曲线运动,所以n t a a a +=, 设质点的速度为v ,由图可知: a a v v y n cos ==θ,所以: y v v a a n = 将c v y =,ρ 2 n v a = 代入上式可得 ρ c v a 3 = 证毕 1-7 证明:因为n 2 a v =ρ,v a a v a ?==θsin n 所以:v a ?= 3 v ρ 证毕 1-10 解:设初始时,绳索AB 的长度为L ,时刻t 时的长度 为s ,则有关系式: t v L s 0-=,并且 222x l s += 将上面两式对时间求导得: 0v s -= ,x x s s 22= 由此解得:x sv x -= (a ) (a)式可写成:s v x x 0-= ,将该式对时间求导得: 2 02 v v s x x x =-=+ (b) 将(a)式代入(b)式可得:32 20220x l v x x v x a x -=-== (负号说明滑块A 的加速度向上) 1-11 解:设B 点是绳子AB 与圆盘的切点,由于绳子相对圆盘无滑动,所以R v B ω=,由于绳子始终处 于拉直状态,因此绳子上A 、B 两点的速度在 A 、B 两点连线上的投影相等,即: θcos A B v v = (a ) 因为 x R x 2 2cos -= θ (b ) 将上式代入(a )式得到A 点速度的大小为: 2 2 R x x R v A -=ω (c ) 由于x v A -=,(c )式可写成:Rx R x x ω=--22 ,将该式两边平方可得: 222222)(x R R x x ω=- 将上式两边对时间求导可得: x x R x x R x x x 2232222)(2ω=-- 将上式消去x 2后,可求得:2 22 42) (R x x R x --=ω 由上式可知滑块A 的加速度方向向左,其大小为 2 22 42) (R x x R a A -=ω 1-13 解:动点:套筒A ; 动系:OA 杆; 定系:机座; 运动分析: 绝对运动:直线运动; 相对运动:直线运动; 牵连运动:定轴转动。 根据速度合成定理 r e a v v v += 有:e a cos v v =?,因为AB 杆平动,所以v v =a , o v o v a v e v r v x o v x o t
1.简要按形成原因汽车空气阻力怎么分类?简单概述各种阻力的形成。(P82) 汽车空气阻力分为形状阻力、干扰阻力、内循环阻力、诱导阻力以及摩擦阻力;1)形状阻力占压差阻力的大部分,主要与边界层流态和车身后的流体分离产生的尾涡有关;2)干扰阻力是由于车身表面凸起物、凹坑和车轮等局部的影响着气流的流动而引起的空气阻力;3)内循环阻力是流经车身内部的气流对通道的作用以及流动中的能量损耗产生的;4)诱导阻力是在侧面由下向上的气流形成的涡流的作用下,车顶上面的气流在后背向下偏转,产生的实际升力中一向后的水平分力;5)摩擦阻力是由于空气粘性使其在车身表面产生的切向力。 2.简述汽车的楔形造型在空气动力特性方面的特点。 1)前端低矮,进入底部的空气量少,底部产生的空气阻力小; 2)发动机罩与前风窗交接处转折平缓,产生的空气阻力小; 3)后端上缘的尖棱,使得诱导阻力较小; 4)前低后高,‘翼形’迎角小,使空气升力小; 5)侧视轮廓图前小后大,气压中心偏后,空气动力稳定性好。 3.假设某电动汽车的质心位置在前后轮轴中间位置,且前后车轮的侧片刚度相 同,电池组放在中间质心位置,试问该车稳态转向特性类型属于哪一类?在以下三种情况下,该车的稳态转向也行会如何变化? 1)将电池组移到前轴放置; 2)将电池组移到后轴放置; 3)将电池组分为两部分(质量相等),分别放在前后轴上。 根据稳定性因数公式 该车稳态转向特性属于中性转向。 1)电池组移至前轴上放置,质心前移,变为不足转向;
2)将电池组移到后轴上放置,质心后移,变为过多转向; 3)质心位置不变,仍为中性转向。 4.什么是被动悬架、半主动悬架、主动悬架?说明采用天棚阻尼的可控悬架属 于哪一类悬架及其理由。 被动悬架是悬挂刚度和阻尼系数都不可调节的传统悬架;半主动悬架的阻尼系数可自动控制,无需力发生器,受减振器原理限制,不能实现最优力控制规律;主动悬架的悬架力可自动控制,需要增设力发生器,理论上可实现最优力控制规律。 采用天棚阻尼的可控悬架属于主动悬架,因为其天棚阻尼是可调节的,同时具有自动控制悬架力的力发生器。 5.1)设某车垂向动力学特性可用1/4模型描述,已知簧上质量为300kg,悬架 弹簧刚度为21000N/m,悬架阻尼系数为1500Ns/m,如果该车身采用天棚阻尼控制器进行悬架控制,取天棚阻尼系数为4200Ns/m。请分别写出两种模型的频率响应函数,绘出该车被动悬架和采用天棚阻尼的可控悬架的幅频响应曲线;2)证明天棚阻尼系统不存在共振峰。 6.试说明ABS的目的和控制难点,并具体阐述ABSA在高附着路面上的一般控制 过程。 目的:调节车轮制动压力、控制制动强度以获得最佳滑转率,防止抱死,提高纵向制动能力和侧向稳定性; 控制难点:ABS的控制目标是最佳滑移率,但最佳滑移率是一个变值,轮胎、路面、在和、车速、侧偏角不同,对应的最佳滑移率也不同,所以要求ABS 能进行自动调节。另外,车轮的滑移率不易直接测得,需要其他的间接参数作为其控制目标参数。 一般控制过程(见P116 汽车系统动力学)
2006.6 1.简要按形成原因汽车空气阻力怎么分类?简单概述各种阻力的形成。(P82) 汽车空气阻力分为形状阻力、干扰阻力、内循环阻力、诱导阻力以及摩擦阻力;1)形状阻力占压差阻力的大部分,主要与边界层流态和车身后的流体分离产生的尾涡有关;2)干扰阻力是由于车身表面凸起物、凹坑和车轮等局部的影响着气流的流动而引起的空气阻力;3)内循环阻力是流经车身内部的气流对通道的作用以及流动中的能量损耗产生的;4)诱导阻力是在侧面由下向上的气流形成的涡流的作用下,车顶上面的气流在后背向下偏转,产生的实际升力中一向后的水平分力;5)摩擦阻力是由于空气粘性使其在车身表面产生的切向力。 2.简述汽车的楔形造型在空气动力特性方面的特点。 1)前端低矮,进入底部的空气量少,底部产生的空气阻力小; 2)发动机罩与前风窗交接处转折平缓,产生的空气阻力小; 3)后端上缘的尖棱,使得诱导阻力较小; 4)前低后高,‘翼形’迎角小,使空气升力小; 5)侧视轮廓图前小后大,气压中心偏后,空气动力稳定性好。 3.假设某电动汽车的质心位置在前后轮轴中间位置,且前后车轮的侧片刚度相 同,电池组放在中间质心位置,试问该车稳态转向特性类型属于哪一类?在以下三种情况下,该车的稳态转向也行会如何变化? 1)将电池组移到前轴放置; 2)将电池组移到后轴放置; 3)将电池组分为两部分(质量相等),分别放在前后轴上。 根据稳定性因数公式 该车稳态转向特性属于中性转向。 1)电池组移至前轴上放置,质心前移,变为不足转向; 2)将电池组移到后轴上放置,质心后移,变为过多转向; 3)质心位置不变,仍为中性转向。 4.什么是被动悬架、半主动悬架、主动悬架?说明采用天棚阻尼的可控悬架属 于哪一类悬架及其理由。 被动悬架是悬挂刚度和阻尼系数都不可调节的传统悬架;半主动悬架的阻尼系数可自动控制,无需力发生器,受减振器原理限制,不能实现最优力控制规律;主动悬架的悬架力可自动控制,需要增设力发生器,理论上可实现最优力控制规律。 采用天棚阻尼的可控悬架属于主动悬架,因为其天棚阻尼是可调节的,同时具有自动控制悬架力的力发生器。 5.1)设某车垂向动力学特性可用1/4模型描述,已知簧上质量为300kg,悬架
《地下水动力学》 习题集 第一章渗流理论基础 一、解释术语 1、渗透速度 2、实际速度 3、水力坡度 4、贮水系数 5、贮水率 6、渗透系数 7、渗透率 8、尺度效应 9、导水系数 二、填空题 1.地下水动力学就是研究地下水在孔隙岩石、裂隙岩石与岩溶岩石中运动规律的科学。通常把具有连通性的孔隙岩石称为多孔介质,而其中的岩石颗粒称为
骨架。多孔介质的特点就是多相性、孔隙性、连通性与压缩性。 2.地下水在多孔介质中存在的主要形式有吸着水、薄膜水、毛管水与重力水,而地下水动力学主要研究重力水的运动规律。 3.在多孔介质中,不连通的或一端封闭的孔隙对地下水运动来说就是无效的,但对贮水来说却就是有效的。 4、地下水过水断面包括_空隙_与_固体颗粒_所占据的面积、渗透流速就是_过水断面_上的平均速度,而实际速度就是_空隙面积上__的平均速度。 在渗流中,水头一般就是指测压管水头,不同数值的等水头面(线)永远不会相交。 5、在渗流场中,把大小等于_水头梯度值_,方向沿着_等水头面_的法线,并指向水头_降低_方向的矢量,称为水力坡度。水力坡度在空间直角坐标系中的三个分量 分别为_ H x ? - ? _、 H y ? - ? _与_ H z ? - ? _。 6、渗流运动要素包括_流量Q_、_渗流速度v_、_压强p_与_水头H_等等。 7、根据地下水渗透速度_矢量方向_与_空间坐标轴__的关系,将地下水运动分为一维、二维与三维运动。 8、达西定律反映了渗流场中的_能量守恒与转换_定律。 9、渗透率只取决于多孔介质的性质,而与液体的性质无关,渗透率的单位为 cm2或da。
第一章 单自由度系统 1.1 总结求单自由度系统固有频率的方法和步骤。 单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。 1、 牛顿第二定律法 适用范围:所有的单自由度系统的振动。 解题步骤:(1) 对系统进行受力分析,得到系统所受的合力; (2) 利用牛顿第二定律∑=F x m && ,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 2、 动量距定理法 适用范围:绕定轴转动的单自由度系统的振动。 解题步骤:(1) 对系统进行受力分析和动量距分析; (2) 利用动量距定理J ∑=M θ &&,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 3、 拉格朗日方程法: 适用范围:所有的单自由度系统的振动。 解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ; (2)由格朗日方程 θθ ??- ???L L dt )(&=0,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 4、 能量守恒定理法 适用范围:所有无阻尼的单自由度保守系统的振动。 解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const (2)将能量守恒定理T+U=Const 对时间求导得零,即 0) (=+dt U T d ,进一步得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 1.2 叙述用衰减法求单自由度系统阻尼比的方法和步骤。 用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。 方法一:衰减曲线法。 求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。 (2)由对数衰减率定义 )ln( 1 +=i i A A δ, 进一步推导有 2 12ζ πζδ-= ,
动力学复习试题 本试卷共4页,19小题,满分150分。考试用时l20分钟。 一、选择题(本题共12小题,每小题4分,选对得4分,选不全得2分,共计48分)。 1.在研究物体的运动时,下列物体中可以当作质点处理的是( ) A .中国乒乓球队员马林在第29届北京奥运会上获得男单的金牌,在研究他发出的乒乓球时 B .北京奥运会男子50米步枪三种姿势射击中,研究美国名将埃蒙斯最后一枪仅打了4.4环的子弹 C .研究哈雷彗星绕太阳公转时 D .用GPS 定位系统研究汽车位置时 2.某班同学去部队参加代号为“猎豹”的军事学习,甲、乙两个小分队同时从同一处O 出发,并同时捕“豹”于A 点,指挥部在荧光屏上描出两个小分队的行军路径如图所示,则( ) ① 两个小分队运动的平均速度相等 ② 甲队的平均速度大于乙队 ③ 两个小分队运动的平均速率相等 ④ 甲队的平均速率大于乙队 A .①④ B .①③ C .②④ D .③④ 3.如图,用一根细绳和一根轻直杆组成三角支架,绳的一端绕在手指上,杆的一端顶在掌心,当A 处挂上重物时,绳与杆对手指和手掌均有作用,对这两个作用力的方向判断完全正确的是下列中的 ( ) 4.如右图所示,小车上固定着三角硬杆,杆的端点处固定着一个质量为m 的小球.当小车有水平向右的加速度且逐渐增大时,杆对小球的作用力的 变化(用F 1至F 4变化表示)可能是下图中的(OO '沿杆方向)( )
5.用水平力F 推静止在斜面上的物块,当力F 由零开始逐渐增大而物块仍保持静止状态,则物块( ) A 、所受合力逐渐增大 B 、所受斜面摩擦力逐渐增大 C 、所受斜面弹力逐渐增大 D 、所受斜面作用力逐渐变大 6.小球被细绳系住放在倾角为θ的光滑斜面上,如右图,当绳子从水 平方向逐渐向上偏移时,细绳上的拉力将( ) A .逐渐增大 B .逐渐减小 C .先减小,后增大 D .先增大,后减小 7. “蹦极”是一项非常剌激的体育运动。(如右图)某人身系弹性绳 自高空P 点自由下落,图中a 点是弹性绳的原长位置,c 点是人所能达 到的最低点,b 点是人静止地悬吊着时的平衡位置,人在从P 点落下到 最低c 点的过程中,下列说法错误的是( ) A .人在Pa 段作自由落体运动,处于完全失重状态 B .在ab 段绳的拉力小于人的重力,人处于失重状态 C .在bc 段绳的拉力小于人的重力,人处于失重状态 D .在c 点,人的速度为零,其加速度也为零 8.a 、b 两物体从同一位置沿同一直线运动,它们的速度图象如图所示, 下列说法正确的是( ) A .a 、b 加速时,物体a 的加速度小于物体b 的加速度 B .20秒时,a 、b 两物体相距最远 C .60秒时,物体a 在物体b 的前方 D .40秒时,a 、b 两物体速度相等,相距200m 9.科学研究发现在月球表面: (1)没有空气; (2)重力加速度约为地球表面的1/6; (3)没有磁场。 若宇航员登上月球后在空中从同一高度同时释放氢气球和铅球,忽略地球和其他星球对月球的影响,下列说法正确的是( ) A .氢气球将向上加速上升,铅球自由下落 B .氢气球和铅球都处于失重状态 C .氢气球和铅球都将下落,但铅球先落到地面 D .氢气球和铅球都将下落,且同时落地 10.一辆汽车沿着笔直的公路以速度v 1行驶了2/3的路程,接着以速度v 2跑完其余1/3的路程,则汽车在全程的平均速度为: A .122123v v v v + B .6221v v + C .221v v + D .2221v v + c b
12-8机构如图,已知OA = O 1B = l ,O 1B ⊥OO 1,力偶矩M 。试求机构在图示位置平衡时,力F 的大小。 解:应用虚位移原理:0δδ=?-?θM r F B (1) 如图所示,e a δsin δr r =θ;其中:θδδa l r =; δδe l l r r B =所以:B r l δsin sin δθθθ=, 代入式(1)得:l M F = 12-13在图示结构中,已知F = 4kN ,q = 3kN/m ,M = 2kN · m ,BD = CD ,AC = CB = 4m ,θ = 30o。试求固定端A 处的约束力偶M A 与铅垂方向的约束力F Ay 。 解:解除A 处约束力偶,系统的虚位移如图(a )。 0δsin δ2δ=-+D A r F r q M θ?(1) 其中:?δ1δ?=r ; ?δ4δδδ?===B D C r r r 代入式(1)得: 0δ)sin 42(=-+?θF q M A m kN 22sin 4?=-=q F M A θ 解除A 处铅垂方向位移的 约束,系统的虚位移如图(b )。 应用虚位移原理: 0δδ2cos δ=+-BC D A Ay M r F r F ?θ(2) 其中:BC C A r r ?θδcos 4δδ==;BC D r ?δ2δ = 代入式(2)得:0δ)22cos cos 4(=+?-?BC Ay M F F ?θθ;kN 577.030cos 41=? -?= M F F Ay 习题12-8解图 B
5-27质量为1m 的滑块1M 可沿光滑水平面滑动,质量为2m 的小球2M 用长为l 的杆AB 与滑块连接,杆可绕轴A 转动,如图所示。若忽略杆的重量,试求系统的首次积分。 解: 取整个系统为研究对象,该系统有二个自由度,取滑块的位移x ,以及杆AB 与铅垂方向的夹角?为广义坐标。系统的动能为: 22212 121B A v m v m T += ])sin ()cos [(21 2122221????l l x m x m +++= 22222212 1 cos )(21??? l m x l m x m m +++= 设0=?时势能为零,系统的势能为: )cos 1(2?-=gl m V 拉格朗日函数: )cos 1(2 1 cos )(2122222221????--+++= -=gl m l m x l m x m m V T L 拉格朗日函数中不显含广义坐标x 和时间t ,存在循环积分和广义能量积分,即: =++=??=????cos )(221 l m x m m x T x L 常数 =-++++= +)cos 1(2 1 cos )(2122222221????gl m l m x l m x m m V T 常数 5-28图示质量为2m 的滑块B 沿与水平成倾角 α的光滑斜面下滑,质量为1m 的均质细杆OD 借助铰链O 和螺旋弹簧与滑块B 相连,杆长为 l ,弹簧的刚度系数为k 。试求系统的首次积分。 解: 取整个系统为研究对象,该系统有二个自由度,取滑块B 沿斜面的位移s ,以及杆OD 与铅垂方向的夹角?为广义坐标。杆OD 作平面运动, 系 A v BA v B v CB v C φ α
反应动力学习题 一、 判断题: 1催化剂只能改变反应的活化能,不能改变反应的热效应。 ............. () 2、 质量作用定律适用于任何化学反应 ........................... () 3、 反应速率常数取决于反应温度,与反应物、生成物的浓度无关。 ........ () 二、 选择题: 1?若反应:A + B T C 对A 和B 来说都是一级的,下列叙述中正确的 ^是????( )。 (A)此反应为一 级反应; (B)两种反应物 中,当其中任一种的浓度增大2倍,都将使反应速 率增大2倍; (C)两种反应物 的浓度同时减半,则反应速率也将减半; (D)该反应速率 系数的单位为s -1。 2.反应 A + B T 3D 的 E a (正)=m kJ mol -1, E a (逆)=n kJ mol -1 ,则反应 的厶r H m = ....... ( )) 1 1 1 1 (A) ( m^n) kJ md ; (B) (n-m) kJ mol ; (C) (m-3n) kJ mol ; (D) (3 n-m) kJ mol 。 3. 下? 列关于讣 催化齐U 的 叙述中,错 误的是 ....................... .......... ()。 (A) 在 几 个 反 应 中,某 催化剂可选择地加快其中某- 「反应的反应 速 率; (B) 催 化 剂 使 正、 逆反 应速率增大 的倍数相同; (C) 催 化 剂 不 能 改变反应的始态和 终态; (D) 催 化 剂 可 改 变某一 -反应的正向 与逆向的反应速 率之比。 4. 当速率常数的单位为 mol -1 dm 3 s -1时,反应级数为 ........................... () (A ) 一级; (B )二级; (C )零级; (D )三级 5. 对于反应2A + 2B T C 下列所示的速率表达式正确的是 ....................... ( ) (C) 6. 反应2A + B T D 的有关 实验数据在表中给出,此反应的速率常数 k/mol -2dm 6min -1约 为 ...................................................................... ( ) 初始浓度 最初速率 -3 -3 -3 -1 [A] /mol dm [B]/mol dm v/mol dm min -2 0.05 0.05 4.2 >102 -2 0.10 0.05 8.4 10 -1 0.10 0.10 3.4 10 2 2 3 3 (A) 3.4 11 (B) 6.7 11 (C) 3.4 11 (D) 6.7 11 7. 催化剂是通过改变反应进行的历程来加速反应速率。这一历程影响 .......... ( ) (A )增大碰撞频率; (B )降低活化能; (C )减小速率常数; (D )增大平衡常数值。 8. ................................................................................................................................................ 下列叙 述中正确的是 ................................................................... ( ) (A) _2 " [B] =3 " t (D)
1.半径为R的均匀磁化介质球,磁化强度为,则介质球的总磁矩为 A. B. C. D. 0 答案:B 2.下列函数中能描述静电场电场强度的是 A. B. C. D.(为非零常数) 答案:D 3.充满电容率为的介质平行板电容器,当两极板上的电量(很小),若电容器的电容为C,两极板间距离为d,忽略边缘效应,两极板间的位移电流密度为: A. B. C. D. 答案:A 4.下面矢量函数中哪一个不能表示磁场的磁感强度式中的为非零常数 A.(柱坐标) B. C. D. 答案:A 5.变化磁场激发的感应电场是 A.有旋场,电场线不闭和 B.无旋场,电场线闭和 C.有旋场,电场线闭和 D. 无旋场,电场线不闭和
6.在非稳恒电流的电流线的起点.终点处,电荷密度满足 A. B. C. D. 答案:D 7.处于静电平衡状态下的导体,关于表面电场说法正确的是: A.只有法向分量; B.只有切向分量 ; C.表面外无电场 ; D.既有法向分量,又有切向分量 答案:A 8.介质中静电场满足的微分方程是 A. B.; C. D. 答案:B 9.对于铁磁质成立的关系是 A. B. C. D. 答案:C 10.线性介质中,电场的能量密度可表示为 A. ; B.; C. D.
11.已知介质中的极化强度,其中A为常数,介质外为真空,介质中的极化电荷体密度 ;与垂直的表面处的极化电荷面密度分别等于 和。答案: 0, A, -A 12.已知真空中的的电位移矢量=(5xy+)cos500t,空间的自由电荷体密度为答案: 13.变化磁场激发的感应电场的旋度等于。答案: 14.介电常数为的均匀介质球,极化强度A为常数,则球内的极化电荷密度为,表面极化电荷密度等于答案0, 15.一个半径为R的电介质球,极化强度为,则介质中的自由电荷体密度 为 ,介质中的电场强度等于. 答案: 22. 解: (1)由于电荷体系的电场具有球对称性,作半径为的同心球面为高斯面,利用高斯定理 当 0<r<时,
第三篇 动力学 图16-1 第3篇 动力学 主要知识点:(1)质点动力学; (2)动量定理; (3)动量矩定理; (4)动能定理; (5)达朗伯原理; (6)振动基础。 质点动力学 1. 如图所示,桥式起重机上跑车悬吊一重为W 的重物,以速度vo 作匀速直线运动,刹车后,重物的重心因惯性绕悬挂点O 向前摆动,求钢绳的最大拉力。 所示。 取自然轴,列运动微分方程如下 2. 液压减振器工作时,活塞在液压缸内作直线运动。若液体对活塞的阻力正比于活塞的速度v ,即F R =-μv ,其中μ为比例常数。设初始速度为v o ,试求活塞相对于液压缸的运动规律,并确定液压缸的长度。 解:取活塞为研究对象,如所示。 建立质点运动微分方程为: 令k=u/m 代入上式得: 分离变量,对等式两边积分,并以初始条件 t =0、v =v 0代入 ?τsin d d W t v g W a -== ? cos T 2 W F l v g W a n -==) (cos 2 T gl v W F +=?0 =?) 1(20 max T gl v W F +=
∫∫t kt x dt e v dx 0 00=gH υy 21=∫t y y y dt F υm υm 0 12-=t F υm N y --1=kN N gH t m F N 7.16265.18.9201.03000 2=××==2 12212cos sin m m t ωe m y m m t ωe m x C C += +=g m m F a m m F a m m y Cy x Cx )(-)()(2 12121+=+=+t e m g m m F t e m F y x ωωωωcos )(sin 2 22122++=-=2210ωe a a C C ==e i i C i m F ∑a =Σ2122--cos W W F t ωa m y C = 积分后得: 再次积分,并以初始条件 t =0、x =0代入: 得到: - ()[]μmv k v k v x t ///e -1lim 00-k t 0max ===∞ → 动量定理 3. 锤的质量为3000kg ,从高度H =1.5m 处自由落到工件上,如图所示。已知工件因受锤击而变形所经时间t =0.01s ,求锻锤对工件的平均打击力。 解: 锤自由下落H 时的速度: 得: 4. 电动机的外壳用螺栓固定在水平基础上,外壳与定子的总质量为m 1。质心位于转轴的中心O 1,转子质量为m 2,转子的质心O 2到O 1的距离为e 。若转子匀速转动,角速度为w 。求基础的支座的反力。 解:解法一:先写出xc 、yc ,求导得acx 、acy ,代入方程求力。 解法二:先求出各ai ,用质心运动定理来求力 x C F t a m =-ωsin 22t ωωe m F x sin 22=2 122cos W W t ωωe m F y ++=
第五章 电磁波的辐射 1. 若把麦克斯韦方程租的所有矢量都分解为无旋的(纵场)和无散的(横场)两部分,写出E 和B 的这两部分在真空中所满足的方程式,并证明电场的无旋部分对应于库仑场。 解:真空中的麦克斯韦方程组为 t ?-?=??/B E , (1) 0/ερ=??E , (2) t ??+=??/000E J B εμμ, (3) 0=??B (4) 如果把方程组中所有矢量都分解为无旋的纵场和无散的横场,并分别用角标L 和T 表示,则:由于0=??B ,所以B 本身就是无散场,没有纵场分量,即 0=L B ,T B B =; T L E E E +=,0=??L E ,0=??T E ; T L J J J +=,0=??L J ,0=??T J ; 由(1)得:t T T T L ?-?=??=+??/)(B E E E (5) 由(2)得:0/)(ερ=??=+??L T L E E E (6) 由(3)得:t L L T L T ?+?++=??/)()(000E E J J B εμμ )/()/(000000t t T T L L ??++??+=E J E J εμμεμμ (7) 由电荷守恒定律t ?-?=??/ρJ 得:)/(/0t t L L ???-?=?-?=??E J ερ 又因为 )/(00t L L ???-?==??E J ε,所以 t L L ??-=/0E J ε,即 0/0=??+t L L E J ε (8) (7)式简化为t T T T ??+=??/000E J B εμμ (9) 所以麦克斯韦方程租的新表示方法为: ????? ????=??+==????+=???-?=??0 /0///00 000t t t L L L L T T T T T E J B E E J B B E εερεμμ (10) 由0=??L E 引入标势?,?-?=L E ,代入0/ερ=??L E 得, 02/ερ?-=? 上式的解就是静止电荷在真空中产生的电势分布,所以L E 对应静止电荷产生的库仑场。 2. 证明在线性各向同性均匀非导电介质中,若0=ρ,0=J ,则E 和B 可完全由矢势A 决定。若取0=?,这时A 满足哪两个方程? 解:在线性各向同性均匀非导电介质中,若0=ρ,0=J ,则麦氏方程表示为: t ?-?=??/B E (1) t ??=??/D H (2) 0=??D (3) 0=??B (4)
1.计算题:一个病人用一种新药,以2mg/h的速度滴注,6小时即终止滴注,问终止后2小时体血药浓度是多少?(已知k=0.01h-1,V=10L) 2.计算题:已知某单室模型药物,单次口服剂量0.25g,F=1,K=0.07h-1,AUC=700μg/ml·h,求表观分布容积、清除率、生物半衰期(假定以一级过程消除)。 3.某药静注剂量0.5g,4小时测得血药浓度为 4.532μg/ml,12小时测得血药浓度为2.266μg/ml,求表观分布容积Vd为多少? 4.某人静注某药,静注2h、6h血药浓度分别为1.2μg/ml和0.3μg/ml(一级动力学),求该药消除速度常数?如果该药最小有效剂量为0.2μg/ml,问第二次静注时间最好不迟于第一次给药后几小时? 5.病人静注复方银花注射剂2m/ml后,立即测定血药浓度为1.2μg/ml,3h为0.3μg/ml,该药在体呈单室一级速度模型,试求t1/2。 6.某病人一次用四环素100mg,血药初浓度为10μg/ml,4h后为 7.5μg/ml,试求t1/2。 7.静脉快速注射某药100mg,其血药浓度-时间曲线方程为:C=7.14e-0.173t,其中浓度C的单位是mg/L,时间t的单位是h。请计算:(1)分布容积;(2)消除半衰期;(3)AUC。
8.计算题:某药物具有单室模型特征,体药物按一级速度过程清除。其生物半衰期为2h,表观分布容积为20L。现以静脉注射给药,每4小时一次,每次剂量为500mg。 求:该药的蓄积因子 第2次静脉注射后第3小时时的血药浓度 稳态最大血药浓度 稳态最小血药浓度 9.给病人一次快速静注四环素100mg,立即测得血清药物浓度为10μg/ml,4小时后血清浓度为7.5μg/ml。求四环素的表观分布体积以及这个病人的四环素半衰期(假定以一级速度过程消除)。 10.计算题:病人体重60kg,静脉注射某抗菌素剂量600mg,血药浓度-时间曲线方程为:C=61.82e-0.5262t,其中的浓度单位是μg/ml,t的单位是h,试求病人体的初始血药浓度、表观分布容积、生物半衰期和血药浓度-时间曲线下面积。 11.计算题:已知某药物具有单室模型特征,体药物按一级速度方程清除,其t1/2=3h,V=40L,若每6h静脉注射1次,每次剂量为200mg,达稳态血药浓度。求:该药的(1)ss C max (2)ss C m in (3)ss C (4)第2次给药后第1小时的血药浓度
福建师范大学物理与光电信息科技学院 20___ - 20___ 学年度学期____ 级物理教育专业 《电动力学》试题(一) 试卷类别:闭卷 考试时间:120分钟 姓名______________________ 学号____________________ 一.判断以下概念是否正确,对的打(√),错的打(×)(共15分,每题3分) 1.电磁场也是一种物质,因此它具有能量、动量,满足能量动量守恒定律。 ( ) 2.在静电情况,导体内无电荷分布,电荷只分布在表面上。 () 3.当光从光密介质中射入,那么在光密与光疏介质界面上就会产生全反射。()
4.在相对论中,间隔2S 在任何惯性系都是不变的,也就是说两事件时间先后关 系 保 持 不 变 。 ( ) 5.电磁波若要在一个宽为a ,高为b 的无穷长矩形波导管中传播,其角频率 为 2 2?? ? ??+??? ??≥ b n a m μεπω ( ) 二. 简答题。(每题5分,共15分) 1.写出麦克斯韦方程组,由此分析电场与磁场是否对称?为什么? 2.在稳恒电流情况下,有没有磁场存在?若有磁场存在,磁场满足什么方程? 3.请画出相对论的时空结构图,说明类空与类时的区别. 三. 证明题。(共15分) 从没有电荷、电流分布的麦克斯韦方程出发,推导真空中的E 、B 的波动方程。
四. 综合题。(共55分) 1.内外半径分别为1r 和2r 的无穷长空心导体圆柱,沿轴向流有稳恒均匀自由 电流f j ,导体的磁导率为μ,求磁感应强度和磁化电流。(15分) 2.有一个很大的电解槽中充满电导率为2σ的液体,使其中流着均匀的电流 f j ,今在液体中置入一个电导率为1σ的小球,求稳恒时电流分布和面电荷 分布。(分离变量法)(15分) 3.有带电粒子沿z 轴作简谐振动t i e z z ω-=0,设c z <<ω0,求它的辐射场E 、 B 和能流S 。(13分) 4.一辆以速度v 运动的列车上的观察者,在经过某一高大建筑物时,看见其 避雷针跳起一脉冲电火花,电光迅速传播,先后照亮了铁路沿线的两铁塔。求列车上观察者看到的两铁塔被电光照亮的时间差。该建筑及两铁塔都在同一直线上,与列车前进方向一致。铁塔到建筑物的地面距离已知都是0l 。(12分)
第十六章结构动力学 【例16-1】不计杆件分布质量和轴向变形,确定图16-6 所示刚架的动力自由度。 图16-6 【解】各刚架的自由度确定如图中所示。这里要注意以下两点: 1.在确定刚架的自由度时,引用受弯直杆上任意两点之间的距离保持不变的假定。根据这个假定并加入最少数量的链杆以限制刚架上所有质量的位置,则刚架的自由度数目即等于所加链杆数目。 2.集中质量的质点数并不一定等于体系的自由度数,而根据自由度的定义及问题的具体情形确定。
【例16-2】 试用柔度法建立图16-7a 所示单自由度体系,受均布动荷载)t (q 作用的运动方程。 【解】本题特点是,动荷载不是作用在质量上的集中荷载。对于非质量处的集中动荷载的情况,在建立运动方程时,一般采用柔度法较为方便。 设图a 质量任一时刻沿自由度方向的位移为y (向下为正)。把惯性力I 、阻尼力R 及动荷载)(t P ,均看作是一个静荷载,则在其作用下体系在质量处的位移y ,由叠加原理(见图b 、c 、d 及e ),则 )(R I y P D I P +δ+?=?+?+?= 式中,)t (q EI 38454P =?,EI 483 =δ。将它们代入上式,并注意到y m I -=,y c R -=,得 )(48)(38453 4y c y m EI t q EI y --+= 图16-7 经整理后可得 )(t P ky y c y m E =++ 式中,3EI 481k =δ= ,)(8 5)(t q k t P P E =?= )(t P E 称为等效动荷载或等效干扰力。其含义为:)(t P E 直接作用于质量上所产生的位移和 实际动荷载引起的位移相等。图a 的相当体系如图f 所示。 【例16-3】 图16-8a 为刚性外伸梁,C 处为弹性支座,其刚度系数为k ,梁端点A 、D 处分别有m 和 3 m 质量,端点D 处装有阻尼器c ,同时梁BD 段受有均布动荷载)t (q 作用,试建立刚性梁的运动方程。 【解】 因为梁是刚性的,这个体系仅有一个自由度,故它的动力响应可由一个运动方程来表达,方程可以用直接平衡法来建立。 这个单自由度体系可能产生的位移形式如图b 所示,可以用铰B 的运动)t (α作为基本
第一章 单自由度系统 1、1 总结求单自由度系统固有频率的方法与步骤。 单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法与能量守恒定理法。 1、 牛顿第二定律法 适用范围:所有的单自由度系统的振动。 解题步骤:(1) 对系统进行受力分析,得到系统所受的合力; (2) 利用牛顿第二定律∑=F x m && ,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 2、 动量距定理法 适用范围:绕定轴转动的单自由度系统的振动。 解题步骤:(1) 对系统进行受力分析与动量距分析; (2) 利用动量距定理J ∑=M θ &&,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 3、 拉格朗日方程法: 适用范围:所有的单自由度系统的振动。 解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 与势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ; (2)由格朗日方程 θθ ??- ???L L dt )(&=0,得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 4、 能量守恒定理法 适用范围:所有无阻尼的单自由度保守系统的振动。 解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 与势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const (2)将能量守恒定理T+U=Const 对时间求导得零,即 0) (=+dt U T d ,进一步得到系统的运动微分方程; (3) 求解该方程所对应的特征方程的特征根,得到该系统的固有频率。 1、2 叙述用衰减法求单自由度系统阻尼比的方法与步骤。 用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法与共振法。 方法一:衰减曲线法。 求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期与相邻波峰与波谷的幅值i A 、1+i A 。 (2)由对数衰减率定义 )ln( 1 +=i i A A δ, 进一步推导有 2 12ζ πζδ-= ,
运动力学期末考试题库汇总 运动生物力学期末考试题库(A) 一、简答题(每小题5分共30分) 1、影响人体平衡的生物学因素有哪些? 2、简述动作结构的概念及其生物力学特征? 3、何为人体重心?人体重心一般会在什么位置,它的变化受哪些因素影响? 4、简述动作系统的分类及特点,并举例说明? 5、何为人体外力?运动时主要外力有哪些? 6、简述人体惯性及其在运动中的体现? 二、判断题(正确的在题后括号内打“√”,错误的打“×”。本题共5小题,每小题1分,共5分) 1、单生物运动链是指骨环节+关节+骨环节。() 2、人体下肢的基本运动形式有缓冲、蹬伸和鞭打。() 3、人体内力可以引起人体整体运动状态的改变。() 4、支撑点在重心的上方的平衡为下支撑平衡。() 5、人体运动时合理利用惯性,可以减小体能消耗提高运动能力。()
三、连线题(本题每对一处得1分,共5分) 正确选取平动和转动的运动学参数 位移 平动角位移 加速度 转动速度 角速度 四、填空题(每空2分,共30分) 1、运动生物力学的任务是、、、预防运动损伤、。 2、力系平衡的种类有、、平、空间一般力系平衡四种力系平衡。 3、按照质点的运动轨迹,可将人体的运动分为和;按照刚体运动的形式,可将人体的运动分为、和复合运动。 4、人体运动的描述方法有:、。 5、通常将地球、相对于地球或做匀速直线运动的参照物,称为,也称静参照系。 六、论述题(本题共30分) 1、试结合生物运动链中开放链和闭合链的相关知识分析“练拳如有人,打手如无人”以及练拳时“两手不乱动”,打手时“接手要轻”
等太极拳练习要领?(15分) 2、阐述影响人体下支撑平衡稳定性的因素?(15分) 运动生物力学期末考试题答案(A) 一、简答题(每小题5分共30分) 1、影响人体平衡的生物学因素有哪些? (1)人体不能绝对静止。一方面是人体的呼吸、循环运动使得人体重心不是定点;另一方面人体肌肉张力不能恒定的保持人体姿势严格不变(1分)。(2)人体形状可变。人体支撑面边缘为软组织,有效支撑面面积小于“理论”支撑面的面积;人体可以通过补偿动作或补偿运动反射性的改变身体姿势,保持原有平衡;运动中人体平衡一旦不能控制可以依靠肢体的移动重新确立支撑面,建立新的平衡(2分)。(3)人体内力起作用。人体的内力,运动系统各组织器官产生的力,不能改变人体整体的运动状态。但内力可以通过对外界环境的主动作用,使人体受到外界环境的反作用,从而影响人体平衡(1分)。(4)心理因素的影响。紧张会引起视觉对平衡的调节;紧张也会影响大脑及其下位中枢调节肌紧张(1分)。 2、简述动作结构的概念及其生物力学特征? 运动时所组成的各动作间相互联系、相互作用的方式或顺序称为动作结构(1分)。动作结构的特征主要表现在运动学和动力学两个方面,动作结构的运动学特征是指完成动作时的时间、空间和时空方面表现出来的形式和外貌上的特征,即完成动作过程中人体各关节、各环节随时间变化所表现出来的空间差异(2分);动作结构的动力学特征则是决定动作形式各种力(力矩)相互作用的形式和特点,包括力、惯性和能量3个方面的特征(2分)。因此在教学时既要关注运动学方面内容又要兼顾动力学方面的内容,以提高学习效果。