
0.1. ICClassType(单据类型表)
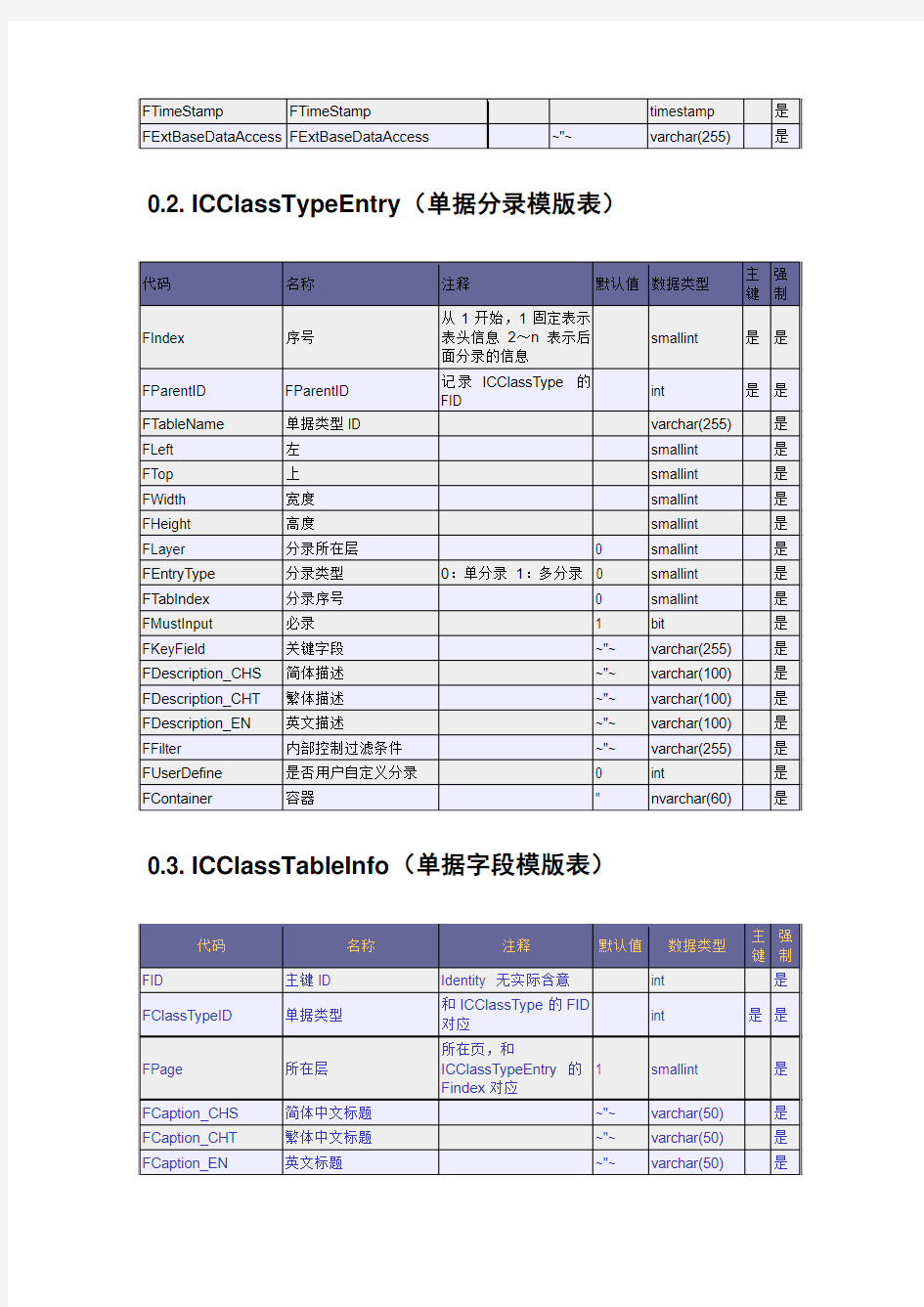
0.2. ICClassTypeEntry(单据分录模版表)
0.3. ICClassTableInfo(单据字段模版表)
0.4. ICClassMutex(BOS单据网络控制表)
0.5. ICClassProfileEntry(过滤方案明细)
0.6. ICClassProfile(过滤方案)
0.7. ICClassUserProfile(单据设置用户配置信息)
0.8. ICClassActionList(BOS扩展服务定义序列表)
0.9. ICClassActionMessage(操作消息定义)
0.10. ICClassActionPosition(菜单位置表)
0.11. ICClassBillAction(业务对象动作)
0.12. ICClassEnvironment(业务场景)
0.13. ICClassKeyFieldMap(逻辑关键字字典)
0.14. ICClassMenu(BOS菜单)
0.15. ICClassMessage
0.16. ICClassMessageUser
0.17. ICClassPredefineAction(预定义动作)
0.18. ICClassLinkCommit(钩稽关系表)
0.19. ICClassLinkEntry(流程字段对应表)
0.20. ICClassLink(业务对象流程表)
0.21. ICClassWorkFlowBill(流程对象节点定义)
0.22. ICClassWorkFlowJoin(流程对象关联定义)
0.23. ICClassWorkFlow(业务流程定义)
0.24. ICClassWriteBackID(反写逻辑表)
0.25. ICClassWriteBackRelate(反写逻辑关系表)
0.26. ICClassWriteBackTaskEntry(反写任务子表)
0.27. ICClassWriteBackTask(反写任务表)
0.28. ICClassCheckRecords(记录审核路线表)
0.29. ICClassCheckStatus(记录审核状态表)
0.30. ICClassMCFlowInfo(审核配置)
0.31. ICClassMCMan(级次审核人)
0.32. ICClassMCMessage(多级审核消息配置)
0.33. ICClassMCRule(审核流转配置)
0.34. ICClassMCTasks(审核流程节点)
0.35. ICClassPack
0.36. ICClassPackEntry
第31卷第3期2008年6月 测绘与空间地理信息 GEOMAT ICS &SPAT IAL I N FORMAT ION TEC HN OLOGY V o.l 31,N o .3 Jun .,2008 收稿日期:2007-05-20 作者简介:张鹏程(1975-),男,河南光山人,中山大学在读博士研究生,高级工程师,主要从事G IS 应用系统开发工作。 基于SuperM ap 的正射影像图建库方法研究 张鹏程 (广州市城市规划勘测设计研究院,广东广州510060) 摘要:数字正射影像作为城市基础地理空间数据框架的组成部分,在城市规划、环保、土地开发利用等方面发 挥着重要的作用。本文通过利用Super M ap Objects 进行二次开发,克服了Super M ap D eskTop 平台中影像数据建库的种种功能限制,实现了城市正射影像图建库过程中影像数据地理坐标的自动匹配、自动构建/金字塔0、自动压缩以及批量入库功能,并以广州市7400k m 2 的1B 2000正射影像图建库为例,验证了本方法的可行性、正确性及高效性。 关键词:Super M ap ;正射影像图;S M C;金字塔 中图分类号:TP311.13 文献标识码:A 文章编号:1672-5867(2008)03-0012-03 Research on Database Construction M et hod for OrthophotoM ap Based on Super M ap Z HANG Peng-c heng (G uangzhou Urban P lann i ng and D esign Survey Research Institu te ,Guan gzhou 510060,Ch i na) Abstrac t :A s t he co m po siti on of urban funda m enta l geospatial da ta fra m e w ork ,d i g ita l O rthopho to p l ays t he i m portant ro le i n urban p l ann i ng,env i ron m enta l protec tion ,l and develop m ent and usi ng ,and othe r aspects .Th is paper ove r whe l m ed the function restricti on dur -i ng constructi ng the i m age database in Super M ap D esk T op platf o r m usi ng Supe r M ap Ob jec ts as seconda ry developi ng too.l It rea lized the f uncti ons of au t om atic m atch i ng ,automa ti c constructing py ram id ,au t om atic co m pressi ng ,and batch da ta load i ng in urban O rthopho -to m ap database construction .T ak i ng t he database constructi on for O rt hopho to m ap at 1B 2000sca l e f o r 7400square k il om eters of G uangzhou c ity as exa m ple ,i t verified the feasibility ,co rrectness and e ffectiveness of t h is me t hod .K ey word s :Supe r M ap ;O rthophoto m ap ;S M C ;py ram i d 0 引 言 正射影像以其信息量丰富、直观、获取信息快速、经济实用、数据现势性好、管理动态性强、以及应用上的广泛性、内容上的详细性等特点已经成为城市基础地理空间数据框架中极为重要的组成部分 [1] 。 Super M ap5.2在影像数据导入、数据显示、创建/金字塔0的速度以及压缩效率等方面都得到了显著的提高,逐渐成为影像数据建库最常用的平台之一。然而,DeskTop 在影像数据入库方面仍然存在如下两个突出的问题:1虽然可以进行正射影像数据的批量入库,但在添加文件对话框中一次可以同时进行入库的影像个数仍是有限制的;o每个影像文件的地理坐标参考文件或坐标参考信息仍需手工逐个指定,这对于大批量的影像图入库来说, 不仅效率低,而且易出错。 Super M ap Ob ject 作为Super M ap 的组件式开发平台,提供了强大的数据转入转出工具)))数据泵(so D ata -Pu m p)对象,通过对转入参数(soI m portPara m s)进行设置,调用I m port 方法进行导入,不仅可以完成影像数据的批量入库,而且在入库过程可自动进行影像的地理坐标匹配、创建/金字塔0以及压缩。 1 Super M ap 影像数据建库步骤及方法 Super M ap 平台影像数据建库包括以下几个步骤:1)建立影像空间数据库;2)生成影像地理坐标参考文件;3)创建影像数据金字塔;4)压缩待入库的影像文件;
Smart3D系列教程6之《案例实战演练3——倾斜数据正射影像及DSM的生产》 一、前言 Wish3D出品的系列教程中,前面两讲分别讲述说明了小物件的照片三维重建、大区域地形的三维重建,从照片的直接导入至软件到通过Excel表格将区块导入处理,从不同的模型类别、不同的导入方式演示了照片三维重建的方法步骤,由此我们可以得到物体的三维模型,用于后续的网络发布和模型分析。在本讲中,我们将要讲述通过Smart3D建模软件除了处理生成模型,还可以生成模型对应的正射影像和DSM,并且通过ArcGIS将这些GeoTIFF格式的成果快速完成拼接。 二、工具材料 包括Smart3D建模软件,一组垂直拍摄而且多角度、重叠度满足重建要求的像片,ArcGIS10.1软件。 三、方法步骤 Smart3D建模软件除了可以生成三维模型以外,还能够生产Orthophoto(正射影像图)和DSM(数字表面模型)。这里值得注意的是,想要生成正射影像图和DSM,必须先生成三维模型,然后基于三维模型生成正射影像图和DSM,然而生成的成果是分块的,这与生成的三维模型是否分块处理无关,所以我们还需要对正射影像图和DSM进行拼接,这里我们需要ArcGIS的镶嵌功能来帮助我们实现。 (一)生成模型 按照系列教程前两讲的思路,大家应该可以很熟练地操作处理数据了,简要步骤及要点如下:1、导入照片 新建一个新的区块,将待三维重建的照片导入,导入结果如下:
别忘记检查一下照片:
检查结果无误后,在3D view中看到分布正常:
2、空三计算 照片导入完毕后,提交空三运算: 后面参数按照默认值,一键往下开始处理,打开Engine,运算结果: 3D view中的照片与模型的关系,一切正常:
一元多项式计算: 程序要求: 1)、能够按照指数降序排列建立并输出多项式; 2)、能够完成两个多项式的相加、相减,并将结果输入。 概要设计: 1.功能:将要进行运算的多项式输入输出。 2.数据流入:要输入的多项式的系数与指数。 3.数据流出:合并同类项后的多项式。 4.程序流程图:多项式输入流程图如图3.2.1所示。 5.测试要点:输入的多项式是否正确,若输入错误则重新输入 2、多项式的加法 (1)功能:将两多项式相加。 (2)数据流入:输入函数。 (3)数据流出:多项式相加后的结果。 (4)程序流程图:多项式的加法流程图如图3.2.2所示。 (5)测试要点:两多项式是否为空,为空则提示重新输入,否则,进行运算。
3、多项式的减法 (1)功能:将两多项式相减。 (2)数据流入:调用输入函数。 (3)数据流出:多项式相减后的结果。 (4)程序流程图:多项式的减法流程图如图3.2.3所示。 (5)测试要点:两多项式是否为空,为空则提示重新输入,否则,进行运算。
详细代码: #include
struct LNode { polynomial data;//链表类型 LNode *next; }; typedef LNode* Link; void CreateLink(Link &L,int n); void PrintList(Link L); void PolyAdd(Link &pc,Link pa,Link pb); void PolySubstract(Link &pc,Link pa,Link pb); void CopyLink(Link &pc,Link pa); void PolyMultiply(Link &pc,Link pa,Link pb); int JudgeIfExpSame(Link pa,Link e); void DestroyLink(Link &L); int CompareIfNum(int i); void DestroyLink(Link &L) { Link p; p=L->next; while(p) { L->next=p->next; delete p; p=L->next; } delete L; L=NULL; } //创建含有n个链表类型结点的项,即创建一个n项多项式void CreateLink(Link &L,int n) { if(L!=NULL) { DestroyLink(L); } Link p,newp; L=new LNode; L->next=NULL; (L->data).exp=-1;//创建头结点 p=L; for(int i=1;i<=n;i++) { newp=new LNode; cout<<"请输入第"< 东莞市市域卫星数字正射影像图投标文件技术方案 国家遥感应用工程技术研究中心 北京超图地理信息技术有限公司 2003年6月 目录 一、项目背景-------------------------------------------------------------------------------------------- 3 二、项目预期目标-------------------------------------------------------------------------------------- 4 三、项目建设原则-------------------------------------------------------------------------------------- 6 四、用户需求-------------------------------------------------------------------------------------------- 8 五、项目的设计思想及可行性技术方案---------------------------------------------------------- 10 六、数据处理和制图质量保证措施---------------------------------------------------------------- 21 七、关于技术保障的进一步说明------------------------------------------------------------------- 22 八、项目实施进度计划------------------------------------------------------------------------------- 24 九、技术服务、售后服务计划及承诺------------------------------------------------------------- 26 目录 一、问题分析.................................... 错误!未定义书签。 问题描述 ........................................................................ 错误!未定义书签。 问题的数学模型............................................................. 错误!未定义书签。 构造数据结构................................................................. 错误!未定义书签。 二、系统分析 ...................................................................... 错误!未定义书签。 可行性研究..................................................................... 错误!未定义书签。 系统结构与主要功能模块 ............................................. 错误!未定义书签。 三、系统设计 ...................................................................... 错误!未定义书签。 系统设计目的与要求 ....................................................... 错误!未定义书签。 系统设计内容................................................................... 错误!未定义书签。 功能算法描述与数据结构说明........................................ 错误!未定义书签。 四、系统实现 ...................................................................... 错误!未定义书签。 五、调试及运行结果........................................................... 错误!未定义书签。 六、收获和体会 .................................................................. 错误!未定义书签。附录 ..................................................................................... 错误!未定义书签。 第2章标准版数据库结构说明 2.1表名: DSAcctForecast 描述: 科目预算2.1.1结构: 字段名类型大小描述 FSchemeID 长整型 4 预算方案 FAcctID 文本15 科目代码 FY ear 整型 2 年度 FPeriod 整型 2 期间 FActual 货币8 实际数 FForecast 货币8 预测数 FBudget 货币8 预算数 2.1.2索引: 索引名字段 PrimaryKey FSchemeID FAcctID FY ear FPeriod 2.2表名: DSAcctModel 描述: 科目预算模型2.2.1结构: 字段名类型大小描述 FSchemeID 长整型 2 预算方案 FAcctID 文本15 科目代码 FModel 整型 2 预测方法 FMovingTimes 整型 2 移动次数 FSmoothCoeff 双精度8 平滑系数,以1%为单位FWeightID 长整型 4 权FCalculated 是/否 1 是否已预算 2.2.2索引: 索引名字段 PrimaryKey FSchemeID FAcctID 2.3表名: DSProdForecast 描述: 产品销售预算 2.3.1结构: 字段名类型大小描述 FSchemeID 长整型 4 预算方案 FProdID 文本15 产品代码 FY ear 整型 2 年度 FPeriod 整型 2 期间 FActualQty 双精度8 实际销量 FActualSale 货币8 实际销售额 FActualCost 货币8 实际成本 FForecastQty 双精度8 预测数量FForecastSale 货币8 预测销售额FForecastCost 货币8 预测成本 FBudgetQty 双精度8 预算数量 FBudgetSale 货币8 预算销售额 FBudgetCost 货币8 预算成本 2.3.2索引: 索引名字段 PrimaryKey FSchemeID FProdID FY ear FPeriod 2.4表名: DSProdModel 描述: 产品销售预算模型2.4.1结构: 字段名类型大小描述 FSchemeID 长整型 4 预算方案 FProdID 文本16 产品代码 卫星影像---北京揽宇方圆信息技术有限公司高分遥感影你5折起. 北京揽宇方圆信息技术有限公司立足于国际,代理了国际主流高分卫星 1.美国Digital Globe公司的quickbird卫星worldview123卫星geoeye卫星ikonos卫星,worldview3全球最高高分辨率卫星数据0.3米的遥感数据产品,其中quickbird worldview geoeye是全球高分辨率卫星数据0.5米的遥感数据产品,IKONOS 1米高分辨率卫星数据。公司的销售服务网络向国内客户提供更及时、保障度更高的高分辨率遥感数据。 2.法国SPOT公司,SOPT1-SPOT6全系例遥感卫星影像数据,其中SOPT1-SOPT5,分辨率2.5到20米,时间是1986年至今,SPOT6卫星是1.5米分辨率卫星数据,2012年SPOT 公司又发射了pleiades卫星,这颗卫星是0.5米分辨率. 3.德国Rapideye卫星星座数据产品:由5颗相同的对地观测卫星组成的RapidEye卫星星座,空间分辨率5米,为全球首个能够提供“红边”波段的商业卫星,可通过5个光谱波段获取影像,这种获取方式可以监测植被变化情况,为植被分类以及植被生长状态监测提供有效信息。 4.美国军方解密锁眼卫星数据系例:锁眼(keyHole)卫星系列,即KH—1至KH—12型照相侦察卫星,锁眼卫星在世界先进的侦察卫星中可谓是大名鼎鼎,它们曾在在“海湾战争”和“科索沃战争”中立下汗马功劳。美国国家侦察局解密锁眼(keyHole)卫星系列遥感数据,目前解密年代的数据为1980年以前的历史数据。全色分辨率0.6米-10米。 5.日本的ALOS卫星数据,分辨率全色2.5米-多光谱10米,这颗卫星2011年4月停止运行了。 6.国内的高分卫星:资源3号和高分一号 7.智能化的遥感影像数据处理:-,融合匀色拼接等,二,地物地貌处理,三,生成正射影像,四,遥感解译等遥感技术应用服务。 单元练习1 一.判断题(下列各题,正确的请在前面的括号内打√;错误的打╳) (√)(1)数据的逻辑结构与数据元素本身的内容和形式无关。 (√)(2)一个数据结构是由一个逻辑结构和这个逻辑结构上的一个基本运算集构成的整体。(ㄨ)(3)数据元素是数据的最小单位。 (ㄨ)(4)数据的逻辑结构和数据的存储结构是相同的。 (ㄨ)(5)程序和算法原则上没有区别,所以在讨论数据结构时可以通用。 (√)(6)从逻辑关系上讲,数据结构主要分为线性结构和非线性结构两类。 (√)(7)数据的存储结构是数据的逻辑结构的存储映像。 (√)(8)数据的物理结构是指数据在计算机内实际的存储形式。 (ㄨ)(9)数据的逻辑结构是依赖于计算机的。 (√)(10)算法是对解题方法和步骤的描述。 二.填空题 (1)数据有逻辑结构和存储结构两种结构。 (2)数据逻辑结构除了集合以外,还包括:线性结构、树形结构和图形结构。 (3)数据结构按逻辑结构可分为两大类,它们是线性结构和非线性结构。 (4)树形结构和图形结构合称为非线性结构。 (5)在树形结构中,除了树根结点以外,其余每个结点只有 1 个前趋结点。 (6)在图形结构中,每个结点的前趋结点数和后续结点数可以任意多个。 (7)数据的存储结构又叫物理结构。 (8)数据的存储结构形式包括:顺序存储、链式存储、索引存储和散列存储。 (9)线性结构中的元素之间存在一对一的关系。 (10)树形结构结构中的元素之间存在一对多的关系, (11)图形结构的元素之间存在多对多的关系。 (12)数据结构主要研究数据的逻辑结构、存储结构和算法(或运算)三个方面的内容。(13)数据结构被定义为(D,R),其中D是数据的有限集合,R是D上的关系的有限集合。(14)算法是一个有穷指令的集合。 (15)算法效率的度量可以分为事先估算法和事后统计法。 (16)一个算法的时间复杂性是算法输入规模的函数。 (17)算法的空间复杂度是指该算法所耗费的存储空间,它是该算法求解问题规模n的函数。(18)若一个算法中的语句频度之和为T(n)=6n+3nlog2n,则算法的时间复杂度为 O(nlog2n)。(19)若一个算法中的语句频度之和为T(n)=3n+nlog2n+n2,则算法的时间复杂度为 O(n2)。(20)数据结构是一门研究非数值计算的程序设计问题中计算机的操作对象,以及它们之间的关系和运算的学科。 图 1. 填空题 ⑴ 设无向图G中顶点数为n,则图G至少有()条边,至多有()条边;若G为有向图,则至少有()条边,至多有()条边。 【解答】0,n(n-1)/2,0,n(n-1) 【分析】图的顶点集合是有穷非空的,而边集可以是空集;边数达到最多的图称为完全图,在完全图中,任意两个顶点之间都存在边。 ⑵ 任何连通图的连通分量只有一个,即是()。 【解答】其自身 ⑶ 图的存储结构主要有两种,分别是()和()。 【解答】邻接矩阵,邻接表 【分析】这是最常用的两种存储结构,此外,还有十字链表、邻接多重表、边集数组等。 ⑷ 已知无向图G的顶点数为n,边数为e,其邻接表表示的空间复杂度为()。 【解答】O(n+e) 【分析】在无向图的邻接表中,顶点表有n个结点,边表有2e个结点,共有n+2e个结点,其空间复杂度为O(n+2e)=O(n+e)。 ⑸ 已知一个有向图的邻接矩阵表示,计算第j个顶点的入度的方法是()。 【解答】求第j列的所有元素之和 ⑹ 有向图G用邻接矩阵A[n][n]存储,其第i行的所有元素之和等于顶点i的()。 【解答】出度 ⑺ 图的深度优先遍历类似于树的()遍历,它所用到的数据结构是();图的广度优先遍历类似于树的()遍历,它所用到的数据结构是()。 【解答】前序,栈,层序,队列 ⑻ 对于含有n个顶点e条边的连通图,利用Prim算法求最小生成树的时间复杂度为(),利用Kruskal 算法求最小生成树的时间复杂度为()。 【解答】O(n2),O(elog2e) 【分析】Prim算法采用邻接矩阵做存储结构,适合于求稠密图的最小生成树;Kruskal算法采用边集数组做存储结构,适合于求稀疏图的最小生成树。 ⑼ 如果一个有向图不存在(),则该图的全部顶点可以排列成一个拓扑序列。 【解答】回路 ⑽ 在一个有向图中,若存在弧、、,则在其拓扑序列中,顶点vi, vj, vk的相对次序为()。 【解答】vi, vj, vk 【分析】对由顶点vi, vj, vk组成的图进行拓扑排序。 2. 选择题 ⑴ 在一个无向图中,所有顶点的度数之和等于所有边数的()倍。 A 1/2 B 1 C 2 D 4 【解答】C 【分析】设无向图中含有n个顶点e条边,则。 数字正射影像图及其应用研究 摘要:随着数字摄影测量技术的发展,数字正射影象产品的制作方法越来越先进,生产效率随之越来越高,市场应用前景也越来越广泛。本文介绍了数字正射影像产品的特点、发展现状,以及对其应用前景和发展方向进行了综合分析。 关键词:数字正射影像;DOM;数字摄影测量;GIS 随着计算机技术和通信技术的迅速发展,人类社会已经进入了数字化信息时代。在国民经济和社会发展中,数字化的地理信息已成为城市乃至整个国家在各领域宏观决策和规划管理必不可少的支撑条件,因此,它对基础地理信息数据的精度及现势性提出了相当高的要求。同时地理信息系统(GIS)的广泛应用和迅速发展,也对基础地理信息数据的形式提出更多的要求,不仅需要矢量数据、栅格数据,还要形象直观的图像数据。 1 数字正射影像图( DOM )的特点 数字正射影像图(Digital Orthophoto Map,缩写DOM)是利用数字高程模型(DEM)对经过扫描处理的数字化航空像片或遥感影像(单色或彩色),经逐像元进行辐射改正、微分纠正和镶嵌,并按规定图幅范围裁剪生成的形象数据,带有公里格网、图廓(内、外)整饰和注记的平面图。 数字正射影像图和通常我们所接触的地图一样,不存在变形,它是地面上的信息在影像图上真实客观的反映,但是所包含的信息远比普通地形图丰富,而且其可读性更强。DOM 同时具有地图几何精度和影像特征,精度高、信息丰富、直观真实、制作周期短。它可作为背景控制信息,评价其它数据的精度、现实性和完整性,也可从中提取自然资源和社会经济发展信息,为防灾治害和公共设施建设规划等应用提供可靠依据。 2数字正射影像图( DOM )的发展现状 实验一一元多项式的表示与相加 实验目的: 1.复习并熟练掌握数据结构所使用的程序设计语言——C语言; 2.学会单步跟踪、调试自己的程序; 3.加深对线性表特别是链表知识的理解和掌握,并能够运用相关知识来解决相关的具体问题,如一元多项式相加等; 程序流程: 1.定义一元多项式链表结构体类型; 2.输入多项式项数以分配存储空间; 3.输入多项式每项的系数和指数,将其插入当前多项式链表。同时判断是否有与当前节点指数相同的项,若存在,则将两项系数相加合并。此外,若存在系数为0的项,将其存储空间释放; 4.进行多项数加法时,新建一个存储结果的链表,分别将两多项式各项依次插入结果多项式即完成多项式相加运算; 5.进行多项数加法时,将减项多项式各项系数化为相反数后进行加法操作,即完成多项式相减运算; 6.对x赋值后,将x值代入多项式进行运算得到多项式的值; 7.输出多项式。 注意:进行完一次运算以后,应该及时销毁无用多项式以释放空间以便再次应用。 算法及注释: 1)定义一元多项式链表结构体类型 typedef struct Lnode{ float cof; int exp; struct Lnode *next; }Lnode ,*Linklist; 2)建立多项式存储线性链表头结点 void makehead(Linklist &head){ head=(Linklist)malloc(sizeof(Lnode)); head->exp=-1; head->next=NULL; head->cof=1; } 3)将输入的多项式信息存储于节点中 void makelnode(Lnode *&p){ p=(Lnode*)malloc(sizeof(Lnode)); printf("Input the cof and exp\n"); scanf("%fx%d",&p->cof,&p->exp); p->next=NULL; } 4)清除系数为零的多项式节点 void clear(Linklist la){ Lnode *p,*q; p=la; q=p->next; while (q){ if (fabs(q->cof)<=0.000001) { p->next=q->next; free(q); q=p->next; } else { p=p->next; q=q->next; } } } 5)找到多项式中与当前节点同指数项位置 int locate(Linklist l,Lnode *&p,Lnode*e){ p=l; if (!l->next) return(0); while(p&&e->exp!=p->exp){ p=p->next; } if(p) return(1); else { p=l; while (p->next&&e->exp<=p->next->exp) p=p->next; if (!p->next){ p=p; 卫星遥感数据的正射影像图的制作 【摘要】卫星遥感是一种采用人们通过航空技术发射在地球外层空间的人造卫星对地球地面、地面以上的空间以及外层太空天体进行综合性观测的技术。而卫星遥感所得数据在正射影像图的制作上应用价值广泛,本文通过阐述卫星遥感数据以及卫星影响图的来源以及所具有的特征,并分析了卫星遥感数据用于制作正射影图过程中出现的纠错、配准以及最后统一融合的方法及原理,简要介绍了正射影像图的构型、调色以及去重叠等数据信息处理的方式和过程。 【关键词】卫星遥感技术;数据;信息;正射影像图;制作 引言 21世纪信息科技时代的到来,卫星遥感技术也在不断的更新、完善之中。目前的卫星遥感技术在用于制作正射影像图方面效果显著,并且成图的精准度越来越高,远远超过比例尺地形图的精准度。卫星遥感技术在城市建设、城市规划以及了解环境状况和资源状况方面具有强大的支撑作用。采用卫星遥感技术制作的城市影像图具有目标辨认难度小、内容清晰、比例尺大以及转释较容易的优势,这项技术已经广泛应用于社会生产和发展的各个层面。该项技术还有助于治理生态环境、搜集专业信息、监测工程项目以及防止各种自然灾害等工作的开展。 1.国内外普遍流行的卫星影像图收集方式 随着新科技革命的不断深入,卫星遥感技术日新月异,目前国际上较为早期出现的卫星遥感技术是来自美国的Earth watch 卫星数据资源库的QuickBird卫星影像,这款卫星影像的地面全色分辨率达到0.61m,成像款幅度达到16.5×16.5/km2,随后美国相继推出了Space imaging Ikonos和Land sat TM卫星遥感影像,这宽两款卫星遥感较Earth watch的QuickBird的影像效果以及成像款幅度都有所提升。俄罗斯生产了一款Spin-2卫星影像,这款卫星影像在地面分辨率方面虽然不及美国的Land sat TM卫星遥感,但是其成像款幅度可以达到200×300/km2却与美国的三种卫星影响有明显的优势。 2.卫星影像图的纠错、配准以及统一融合 2.1 数字纠错 光学纠错仪是一款用于将航拍模拟摄影片转化为平面图的工具,主要适用于传统的框架模幅式的航拍摄像画面的数字影像[1]。现阶段出现了许多新鲜的卫星数字遥感技术,这些技术的影响数据采用传统的光学纠错仪就不能很好地转化。因此,数字微分纠错技术由此诞生。这是一项通过地面的有效参数以及数字地面的基本雏形,在设置适当的构想公式,并依据适当的数学模型控制范围和控制点将航拍摄像画面的数字影像转化为正射影像图的。这种技术不仅简单、方便,而且适用范围较广,已经成为国内外普遍使用的数字纠错技术。 数字正射影像图的制作技术及应用 数字正射影像图是航空航天遥感、计算机科学等高新技术发展的产物,可自动或人机交互式地从其中提取各种专题信息,并直接进入GIS 数据库以实现其自动建立与更新。本文通过实例阐述数字正射影像图的制作技术及应用原理。 标签:数字正射影像航片 数字正射影像图简称DOM,是利用航摄底片扫描数据,采用全数字摄影测量系统,利用数字高程摸型DEM,逐单片数字微分纠正影像处理、数字镶嵌及接边检查,生成DOM数据文件,以特有的数字影像景观直观展现各种地表特征.该图数字信息量丰富,比例尺和相关位置准确,精度高,图面美观易读,能满足用图者多种需求,应用领域广泛,具有快速更新特点。 1数字正射影像图制作基本原理 近代航空、航天遥感技术中许多新的传感器出现,产生了不同于框幅式航摄像片的影像,使原有光学纠正仪器难以适应这些影像的纠正任务。随电子计算机和图像处理技术发展,使用数字影像处理技术,不仅便于影像增强、改变反差等,且可灵活地应用到影像几何变换中。因此形成了数字微分纠正技术,为制作数字正射影像图奠定基础。 1.1数字微分纠正 据有关参数与数字地面模型,利用相应构像方程式,或按一定数字模型用控制点解算,从原始非正射数字影像获取正射影像,此过程是将影像化为很多微小区域逐一进行,且使用的是数字式处理,这叫做数字微分纠正。其基本任务是实现原始图像和纠正后图像这两个图像间几何变换。用很多小区域作为纠正单元,利用该纠正单元地面实际高程控制纠正元素,从而实现从中心投影到正射投影变换。 1.2影像镶嵌 影像纠正过程中地面控制点精度或纠正方法本身有局限性,可造成同一地面特征在相邻影像上有几何错开现象;传感器成像时间、地面形状、太阳高度角及大气环境等因素影响,可使相邻影像出现不同幅射特征等情况。因此镶嵌必须要消除相邻影像几何错开和幅射特征上的差异,以实现影像无缝拼接,使影像色彩平衡、接边区域影像匹配、影像镶嵌等技术。 2数字正射影图制作 2012年我们采用全数字摄影测量系统设备,完成了甘肃河西某地测区1:10000黑白数字正射影像图420幅。本文以此为例,介绍数字正射影像图制作技 第一章数据结构概述 基本概念与术语 1.数据:数据是对客观事物的符号表示,在计算机科学中是指所有能输入到计算机中并被计算机程序所处理的符号的总称。 2.数据元素:数据元素是数据的基本单位,是数据这个集合中的个体,也称之为元素,结点,顶点记录。 (补充:一个数据元素可由若干个数据项组成。数据项是数据的不可分割的最小单位。) 3.数据对象:数据对象是具有相同性质的数据元素的集合,是数据的一个子集。(有时候也叫做属性。) 4.数据结构:数据结构是相互之间存在一种或多种特定关系的数据元素的集合。 (1)数据的逻辑结构:数据的逻辑结构是指数据元素之间存在的固有逻辑关系,常称为数据结构。 数据的逻辑结构是从数据元素之间存在的逻辑关系上描述数据与数据的存储无关,是独立于计算机的。 依据数据元素之间的关系,可以把数据的逻辑结构分成以下几种: 1.集合:数据中的数据元素之间除了“同属于一个集合“的关系以外,没有其他关系。 2.线性结构:结构中的数据元素之间存在“一对一“的关系。若结构为非空集合,则除了第一个元素之外,和最后一个元素之外,其他每个元素都只有一个直接前驱和一个直接后继。 3.树形结构:结构中的数据元素之间存在“一对多“的关系。若数据为非空集,则除了第一个元素(根)之外,其它每个数据元素都只有一个直接前驱,以及多个或零个直接后继。 4.图状结构:结构中的数据元素存在“多对多”的关系。若结构为非空集,折每个数据可有多个(或零个)直接后继。 (2)数据的存储结构:数据元素及其关系在计算机内的表示称为数据的存储结构。 想要计算机处理数据,就必须把数据的逻辑结构映射为数据的存储结构。逻辑结构可以映射为以下两种存储结构: 1.顺序存储结构:把逻辑上相邻的数据元素存储在物理位置也相邻的存储单元中,借助元素在存储器中的相对位置来表示数据之间的逻辑关系。 2.链式存储结构:借助指针表达数据元素之间的逻辑关系。不要求逻辑上相邻的数据元素物理位置上也相邻。 5.时间复杂度分析:1.常量阶:算法的时间复杂度与问题规模n无关系T(n)=O(1) 2.线性阶:算法的时间复杂度与问题规模n成线性关系T(n)=O(n) 3.平方阶和立方阶:一般为循环的嵌套,循环体最后条件为i++ 时间复杂度的大小比较: O(1)< O(log 2 n)< O(n )< O(n log 2 n)< O(n2)< O(n3)< O(2 n ) 正射影像地图的制作及其应用 【摘要】在经济飞速发展的时代,传统的地形图更新速度远远不能跟上时代发展的步伐,利用卫星遥感影像数据和航空摄影制作数字正射影像地图(Digital Orthophoto Map,缩写DOM),在数字正射影像地图上进行各种专题地图和对地形图的更新应用。 【关键词】DOM;数字微分纠正;影像镶嵌;DOM应用 0.引言 数字正射影像图(Digital Orthophoto Map,DOM)是以航摄影片或遥感影像为基础,经扫描处理并经逐像元进行辐射改正、微分纠正和镶嵌,按地形图范围裁剪成的影像数据,并将地形要素的信息以符号、线画、注记、公里格网、图廓(内/外)整饰等形式填加到该影像平面上,形成以栅格数据形式存储的影像数据库。它具有地行图的几何精度和影像特征。 数字正射影像图和通常我们所接触的地图不一样,不存在变形,它是地面上的信息在影像图上真实客观的反映,但是所包含的信息远比普通地形图丰富,而且其可读性更强。DOM同时具有地图几何精度和影像特征,精度高、信息丰富、直观真实、制作周期短。它可作为背景控制信息,评价其它数据的精度、现实性和完整性,也可从中提取自然资源和社会经济发展信息,为防灾治害和公共设施建设规划等应用提供可靠依据。数字正射影像图的制作原理是依据其特点应用专业的地理信息遥感软件对原始感遥影像经过辐射校正、几何校正后,消除各种畸变和位移误差而最终得到具有包含地理信息和各种专题的卫星遥感数字正射影像地图。DOM具有一定几何精度的影像。影像植被信息齐全饱满,整体色调清晰均匀,反差适中。 1.数字正射影像图的制作原理 制作数字正射影像图通常使用基于DEM的纠正方法基于DEM的纠正又分为两种方法:其一是单片纠正;其二是全数字摄影测量方法。如果某个测区已经有DEM数据。即可以使用单片纠正的方法。但就目前来看。DEM还没有覆盖大部分区域,因此很多生产单位都使用全数字摄影测量方法。全数字摄影测量方法利用全数字摄影测量系统,首先根据影像纹理配成立体像对,生成数字高程模型,然后对每一个像元根据其高程进行数字微分纠正,生成正射影像图。使用这种方法能保证成果的质量,但它的成图周期相对较长,对作业员的综合素质要求比较高。作业员应该对全数字摄影测量系统比较熟悉.而且应该了解计算机图形图像处理方面的知识。 1.1正射影像图的制作原理 可以使用全数字摄影测量系统制作各种比例尺的数字正射影像图,基本原理 标准版数据库结构说明 2.1表名: DSAcctForecast 描述: 科目预算 2.1.1结构: 字段名类型大小描述 FSchemeID 长整型 4 预算方案 FAcctID 文本15 科目代码 FYear 整型 2 年度 FPeriod 整型 2 期间 FActual 货币8 实际数 FForecast 货币8 预测数 FBudget 货币8 预算数 2.1.2索引: 索引名字段 PrimaryKey FSchemeID FAcctID FYear FPeriod 2.2表名: DSAcctModel 描述: 科目预算模型 2.2.1结构: 字段名类型大小描述 FSchemeID 长整型 2 预算方案 FAcctID 文本15 科目代码 FModel 整型 2 预测方法 FMovingTimes 整型 2 移动次数 FSmoothCoeff 双精度8 平滑系数,以1%为单位FWeightID 长整型 4 权 FCalculated 是/否 1 是否已预算 2.2.2索引: 索引名字段 PrimaryKey FSchemeID FAcctID 2.3表名: DSProdForecast 描述: 产品销售预算 2.3.1结构: 字段名类型大小描述 FSchemeID 长整型 4 预算方案 FProdID 文本15 产品代码 FYear 整型 2 年度 FPeriod 整型 2 期间 FActualQty 双精度8 实际销量 FActualSale 货币8 实际销售额 FActualCost 货币8 实际成本 FForecastQty 双精度8 预测数量 FForecastSale 货币8 预测销售额 FForecastCost 货币8 预测成本 FBudgetQty 双精度8 预算数量 FBudgetSale 货币8 预算销售额 FBudgetCost 货币8 预算成本 2.3.2索引: 索引名字段 PrimaryKey FSchemeID FProdID FYear FPeriod 2.4表名: DSProdModel 描述: 产品销售预算模型 2.4.1结构: 字段名类型大小描述 FSchemeID 长整型 4 预算方案 FProdID 文本16 产品代码 FModel 整型 2 预测模型 FMovingTimes 整型 2 移动次数 FSmoothCoeff 双精度8 平滑系数,以1%为单位FWeightID 长整型 4 权 FCalculated 是/否 1 是否已预算 FFixedCost 双精度8 固定成本 FUnitMovedCost 双精度8 单位变动成本 目录 一、问题分析 (1) 1.1 问题描述 (1) 1.2 问题的数学模型 (1) 1.3 构造数据结构 (1) 二、系统分析 (2) 2.1 可行性研究 (2) 2.2 系统结构与主要功能模块 (2) 三、系统设计 (4) 3.1系统设计目的与要求 (4) 3.2系统设计内容 (4) 3.3功能算法描述与数据结构说明 (4) 四、系统实现 (7) 五、调试及运行结果 (11) 六、收获和体会 (12) 附录 (13) 1 问题分析 1.1 问题描述 设计一个n元多项式程序,并完成多项式的乘法运算。从实际的角度出发,这里设计的程序是基于一元n次多项式的数学模型。 1.2 问题的数学模型 在数学上,一个一元多项式Pn(x)可按升幂写成:Pn(x)=a 0+a1 x+a2 x^2 +…+a n x^n-1 .它由n+1个系数惟一确定,因此,在计算机里,它可用一个线性表P来表示:Pn=(a0,a1,a2,…,an)每一项的指数i隐含在其系数ai的序号里。 多项式的乘法规则:多次运用单项式与多项式相乘的法则得到的.计算时(a+b)(m+n),先把(m+n)看成一个单项式,(a+b)是一个多项式,运用单项式与多项式相乘的法则,得到(a+b)(m+n)=a(m+n)+b(m+n),然后再次运用单项式与多项式相乘的法则。 1.3 构造数据结构 通过分析多项式的特征,不难看出多项式是由单项式构成的,而每个单项式都具有系数和指数,当系数为0时,该项就失去了意义,在计算机内要表示一个多项式,至少以下数据信息:系数信息、指数信息和指向下一个单项式的指针。通过指针,我们就可以把多个单项式连接起来,形式一个多项式,需要说明的是从广义的角度讲,单项式也是一个多项式。基于以上的分析,我们定义多项式的数据结构为如下结构体形式: typedef struct Polynomial{ float coef;//系数 int expn;//指数 struct Polynomial *next;//指向下一个结点 }*Polyn,Polynomial; //Polyn为结点指针类型正射影像图制作技术方案
数据结构一元多项式的运算
金蝶标准版数据库结构说明.
卫星影像数据库遥感卫星影像数据库
数据结构单元1练习参考答案
数据结构 第六章 图 练习题及答案详细解析(精华版)
数字正射影像图及其应用研究
数据结构:一元多项式的表示与相加
卫星遥感数据的正射影像图的制作
数字正射影像图的制作技术及应用
数据结构复习要点(整理版)
正射影像地图的制作及其应用
金蝶迷你版、标准版数据字典
数据结构一元多项式的运算
相关主题
文本预览