微软模拟飞行小飞机基础导航教程
前言
欢迎阅读我的飞行模拟(导航)教程,这篇教程的是以“微软飞行模拟X”为基础制作的,所以阅读学习本教程前你需要先安装“微软飞行模拟X(有的人把它叫‘微软飞行模拟10’)”或者至少“微软飞行模拟2004(有的人把它叫‘微软飞行模拟9’)”。不了解这两个游戏的人可以到百度搜索,相信你很快会找到许多网站论坛,它们你对学习这款游戏很有帮助。论坛上有许多热心人士会解答你的问题(有的甚至是真飞行员),我也从中受益非浅。
如果你是90年以前出生的,一定对美国911的场景记忆犹新,当然部分90后也知道。对于我来说911却与一个游戏联系在一起——微软飞行模拟2002,原因是听说撞大楼的那些家伙用这款模拟游戏练习过(比2002更早的版本)。从2002年到现在我一直因工作、学习和电脑等原因而断断续续玩着这个游戏。一路玩下来发现国内喜欢玩这款游戏的人虽然不多,但还是有少部分人喜欢钻研它,尤其2005年以后。而今随着电脑配置越来越高,国内也在准备开放低空飞行,这类游戏会受到更多人关注。不过它可不是坐在电脑前三两个小时就能学得上手的游戏,说它是游戏因为它永远不能与真实飞行相比,说它难学因为它模拟出了现实飞行中部分情况,可以让没机会学开真飞机的人最大限度明白飞机是如何从甲地飞到乙地。游戏教程国内网上倒是可以搜出许多,有来自真飞行员、有来自游戏玩家、有的讲解得很深刻、有的讲解得很肤浅,但资料十分零散(至少我是这样觉得),而国外的英文资料则比我们丰富许多。所以我决定把我目前了解的知识都写下来,由于我的知识水平有限,时间仓促,错误在所难免,欢迎批评指正。我的邮件地址:silenthunter_chb@https://www.doczj.com/doc/0115479396.html,。
2011年2月发表
2012年6月第1次更新
读者需知
学习本教程前需要准备好的东西:
1. 微软飞行模拟X或者至少2004版的,但无法保证2004的导航台和机场是否对得上号。
2. 确定游戏中有一架赛斯纳172的飞机。
3. 推荐要有摇杆。摇杆我推荐赛钛克或者罗技的产品,除非资金有限,否则不要买北通或莱仕达这种品
牌。
4. 教程附带有一些PDF航图文件,最好把它们打印出来,边看边飞。如果你想把教程给其它人看请记
得把那些文件也一起交出去。谢谢。
5. 请一定要静下心来把导航的内容学完,暂时放弃737、747、330这些大飞机。因为即使是真飞行员
也是在小飞机里学习得差不多才有机会上大一点的飞机。根据不同人的知识水平、自学能力和空闲时间,估计学完该教程要一个星期到几个月时间,如果你懂英文会学习得更快。
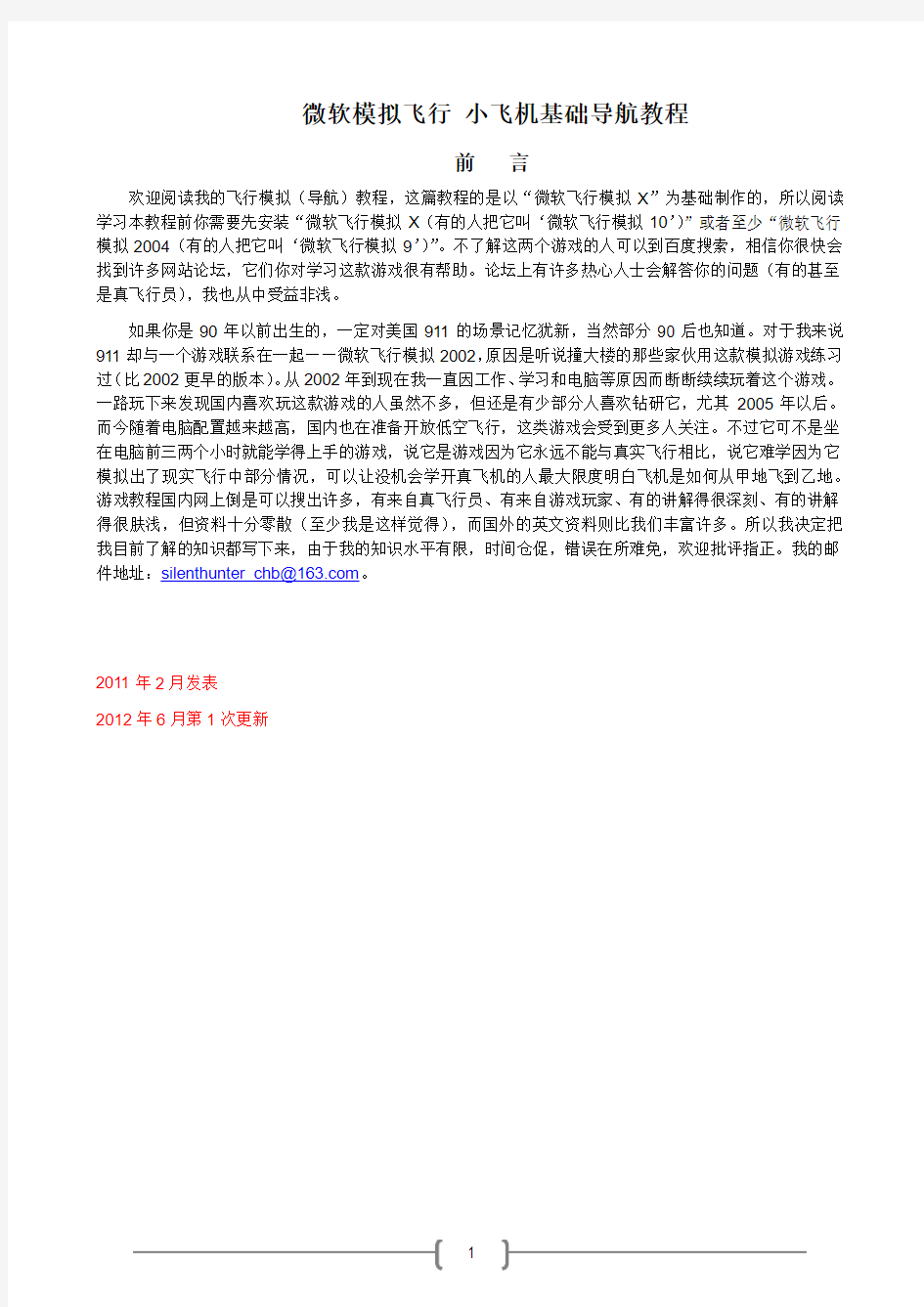
6. 教程教程插图包括的机型有“赛斯纳172、钻石20、赛斯纳208”。
7. 确认你的电脑可以上这个网站https://www.doczj.com/doc/0115479396.html,/,这个网站可以查到全美各种航图,而且都是真实
和实时的。中国国内的航图,可以安装Jeppview这款软件,但Jeppview是美国杰普逊公司的软件,它只包括国内主要机场的航图。国内出版民用航图的机构是CAAC,它出版的航图大家俗称CAAC 航图,包括国内所有民用机场。CAAC航图有一定的保密要求不可随便传播,但实际上网上仍旧能找到不少。
空中导航
基 础
海里与节
将地球赤道分割成360段,每段再分割成60份。你每移动1份,意味着你移动了1海里的距离。1海里约等于6076.113英尺,所以1海里约等于1.15英里,虽然都不是精确值,但按这个比例换算,可以确保你不会去撞山。
1海里=1节,节英文叫knot ,最基本的中文翻译是“结绳记事”的那个“结”,因为古代水手没有现代化的装备,所以就在一条线上打两个结,分析参照物在两个结之间移动的情况来判断船行驶了多少距离,于是knot 的叫法得以保留。可是中文为什么不用“结”而用“节”呢?我也不清楚。
目视飞行 vs 仪表飞行
谈到目视与仪表的问题首先要说说天气因素。一个符合FAA 规定的目视飞行天气,要求至少有3英里的能见度,并且能确保自己与头顶上的云层距离至少500英尺。不过在这种临界点上飞行并不好受,你最好先弄清楚那些1000英尺高的电视塔都在哪里,否则当你看见它们时往往来不及躲避。电视塔会标注在航图上。
现实情况中目视飞行的要求是3英里能见度,飞越人烟稀少的地区时要求飞机最少500英尺AGL ,而云层至少要在飞机上方500英尺,所以云层高度应该不少于1000英尺AGL 。但如果从纽约上空飞过,飞机的最小距离要增加到1000英尺AGL ,若此时城市上空云层高1200英尺AGL 而你却想用目视飞行,你又必须确保距离云层500英尺,于是你就只有700英尺AGL ,机轮可能会擦着摩天大楼楼顶飞过。所以你的飞行计划就不会得到批准。
目视飞行的要求还有许多,不只是保持与云层距离500英尺那么简单。
天气状况低于目视飞行标准,或者你处在A级空域即MSL18000英尺以上的,必须用仪表飞行。在准备仪表飞行前飞行员需先向空管提交申请并得到空管批准。在出发前空管会把经确认的飞行计划简要复述给飞行员,结果可能是“批准申请”,但也可能是“批准申请但做如下修改”而实际上完全修改了你的计划线路。
飞行员可以在任何天气条件下使用仪表飞行。比较明智的做法是,在符合目视飞行的天气条件下也向空管提交仪表飞行计划,比如驾驶一架小型单引擎飞机飞越漆黑夜空下的一大片水域。美国所有商业飞行都是仪表飞行。
飞行高度
第二个值得一提的是飞行高度问题。FAA对高度有一系列的规定,而且目视飞行和仪表飞行的高度规定类似。下面通过直观的讲解来让大家尽量快明白:
。航向在180到359度之间的,目视飞行和仪表飞行的“千”英尺高度全部是得数:2、4、6、8、10。目视飞行的高度“百”英尺高度全部是5,而仪表飞行的“百”英尺高度全部是0。可以理解为“东单(数)西双(数)”。
在仪表飞行方面,空管可能会要求你飞与高度规则不相符的高度,这还是一个有待争论的问题,但反正你得按空管的要求去做。但你不必过分当心,至少空管不会要求你的赛斯纳172飞到17000英尺,毕竟提交飞行计划时包括机型内容。飞行员还要根据各地不同的气压调节高度表,确保自己准确的知道什么时候会接触地面。但在18000英尺以上时就不必当心各地不同的气压问题,统一调为29.92 in.Hg。此外18000英尺以上时对高度的叫法有所不同,比如24000英尺改称FL240。
地磁偏角
如果你拿着指南针往北走,你觉得你
应该走到“地理北极”还是“地磁北极”
呢?答案是地磁北极。飞机上那个罗盘说
白了就是个指南针,你要是对着0度一直
飞那么最终你会到达地磁北极的位置,而
不是想像中的地理北极(假如将来某一天
地磁北极运动到你家底下,朝0度飞就可
以到你家了,不过我想在你家是看不到北
极熊的)。罗盘那个180度则是地磁南极。
这种奇怪的现像就叫地磁偏角,更详细的
知识请去网上搜索。
跑道号
这是美国KMVY机场的平面图,请查找本教程附带的文件:KMVY (AIRPORT DIAGRAM).pdf 。在FSX里选取该机场(用KMVY就可以在游戏中搜索到该机场了),进入游戏后用俯瞰视角对比一下。FSX 是2006年出的所以数据都是2006年之前的,与实际平面图可能有些差别了。
粉红色部分是跑道的磁航向。跑道号的命名规则是:如15号跑道的磁航向是145.7,145.7÷10=14.57,四舍五入是15。不过最终决定权在FAA,有可能因为各种原因造成跑道号看起来没有按标准的命名规则命名。黄色部分是这个机场2010年1月的磁偏角,每个季度会向东边移动0.1度。蓝色部分是这个平面图的有效期,从2011年1月13日至2011年2月10日。
美国所有的机场,其四字母代码全部是以K开头的,中国机场四字母代码全部是Z开头。
目视飞行航图与仪表飞行航图
这是美国纽约附近的一张仪表飞行航图
读懂仪表飞行航图之前必须掌握VOR NDB知识,后面将会讲到,此处仅简单介绍。
这是目视飞行航图,与上面的仪表航图表示的是同一个地方,但地形地貌更加明显以利于飞行员参照地面目标飞行。请查找本教程附带的文件:(目视飞行航图) KACK to KMVY.pdf。你可以试试从FSX的KACK或者KMVY机场起飞,边看航图边飞行,游戏地景基本上都能对得上号,玩起来还是比较有趣的。
VOR
甚高频全向无电信标(V HF O mni-directional R ange, 以下简称VOR), 是一种用于航空的无线电导航系统。其工作频段为108.00 兆赫- 117.95 兆赫的甚高频段,故此得名。VOR发射机发送的信号有两个:一个是相位固定的基准信号;另一个信号的相位随着围绕信标台的圆周角度是连续变化的,也就是说各个角度发射的信号的相位都是不同的。向360度(指向磁北极)发射的与基准信号是同相的(相位差为0),而向180度(指向磁南极)发射的信号与基准信号相位差180度。飞行器上的VOR接收机根据所收到的两个信号的相位差就可以计算出自身处于信标台向哪一个角度发射的信号上。VOR通常与测距仪(DME)同址安装,在提供给飞行器方向信息的同时,还能提供飞行器到导航台的距离信息,这样飞行器的位置就
可以唯一的被确定下来。
VOR如果理解了,道理十分简单。一些专业的解释大家可以去网上搜索,这里我接合自己的体会,尝试用通俗易懂的方法来介绍一下。请先用IE或者flash播放器打开教程附带的VOR_Sim.swf文件,通过该模拟器我们可以完全掌握VOR的工作方式。
下面请按要求一步步地做,只有这样你才能明白VOR是怎么一回事:
●按图中第1点所示选择VOR DME并选中所有复选框。
●注意第2点的仪表,这就是VOR仪表,赛斯纳172有两套VOR,这里显示的是第一套VOR仪表,
第二套VOR仪表这里没有。用鼠标旋转黄色箭头的OBS到030,然后你会看到如图中所示转盘转到3的位置,3表示030度,意思是说将截取指定VOR台的30度径向线(此时表中两条直线可能还没有垂直交叉)。
●把鼠标移动到左上角飞机图标位置,可以移动它的位置。若把鼠标放在飞机左或右边一点的地方你会
看到如-1、-5、-10或+1、+5、+10的数字,此时点击鼠标就可以改变航向。
●把飞机移动到如上图中所示的位置并调转方向至如上图所示,此时再看看VOR表,两条直线是否垂
直?第4点的小三角是否朝上?祝贺你!你现在已经切入VOR台的030度径向线并向着VOR台飞去了。
●不移动飞机位置,但把飞机机头调转到相反方向即210度,是否惊讶地发现VOR表没有发生任何改
变?明明自己背对VOR台越飞越远
而VOR表却毫无变化!对!这就是
VOR会欺骗你的地方了。但你也不
用太担心,一个简单的方法即可使问
题迎刃而解。看看第6点的航向表,
如图:此时它正对着210度,而VOR
表却正对着030度。于是你就明白
飞机其实正朝着远离VOR台的方向
飞走。
●不移动飞机位置和方向,但把VOR表的OBS调到210度。如下图:此时飞机磁航向是210度,当
你把OBS也调到210度时,是不是看起来比较合理了?注意小三角朝下。图中的意思是截到VOR 台210度径向线背对VOR飞,这时飞机会离VOR台越来越远。应该体会罗盘航向与VOR表所选的径向之间的关系。VOR台发射出来的360条径向线与你的罗盘是完全对应的,VOR的30度所指的方向也是你罗盘30度所指的方向。每个VOR台都是一个大大的指南针。
●把飞机移动到墨绿色箭头处,观察VOR表的变化。
●把飞机移动到红色箭头处,再次观察VOR表的变化。
●随意移动飞机的位置与航向,不断地旋转OBS,不断地观察VOR仪表与罗盘航向的变化。
●注意第7点的内容。这叫测距机DME。第一部分10.5nm表示飞机距离VOR台直线距离10.5海里;
第二部分109kt表示飞机的地速是109海里/小时;第三部分6min表示以当前时速需要6分钟就能到达VOR台。
以上内容是VOR的关键,读者必须学透以上内容才可以继续下面的内容。这是读懂各种航图的关键。
NDB
NDB的使用比较简单一些,黄色指针永远显示NDB台在你的哪个方向,只要你保持黄色指针正对前方即可飞向那个台。请用IE或flash播放器打开教程附带的ADF_Sim.swf。
仪表飞行航图
这是美国纽约附近的一张仪表飞行航图,
请查找本教程附带的文件:(仪表飞行航图) KMVY to KPVD.pdf。
1. 这是个NDB台,频率是227,莫尔代码对应的英文是TAN,名字叫做TAUNTON,是个地名。莫尔
代码只有两种声音,嘀(短声),嗒(长声)。后面的点与划就是让你辨认用的,如果听到的短声与长声顺序与它一样则表示你已经选定了这个台。
2. 这是两个VOR台。
频率115.6,代号PVD,如果你听到的莫尔代码声音与图中所示一样则表示选择正确。
频率114.5,代号MVY,如果你听到的莫尔代码声音与图中所示一样则表示选择正确。
3. Localizer航向道辅助引导,它的频率是108.7,莫尔代号I-MVY。
4. 这是PVC与MVY台之间的电波航道。V146是这条航道的名称,因为是由两个VOR台组成的一条
航道,所以用字母V开头。2000表示在该航道飞行不得底于2000英尺。17:从MVY台出发到COSSY
报告点的直线距离17MVY台到PVC台总距离41海里。
5. 从MVY台出发飞向PVD台,VOR设备应当调到PVD台并截取313度径向线。从PVD台出发飞向
MVY台,VOR设备应当调到MVY并截取132度径向线。
6. 红色箭头处是KMVY与KPVD机场,机场旁边分别是MVY和PVD的VOR台。
7. 蓝色箭头处的三角形是AVONN和COSSY报告点。
AVONN点距离PVD台11海里,而且是MVY台与SEY台(左下角)的交叉点,从SEY台到此处共33海里。所以检查自己是否正处于该点,可以用第1套VOR调出MVY台的313度径向线,第2套VOR调出SEY台的046度径向线,当两套VOR表的竖线都竖直了,那么你必定处在这个AVONN 报告点。
COSSY点距离PVD台共24海里,距离MVY台17海里。从AVONN到COSSY距离13海里。
KPVD机场→KMVY机场
1. 设置出生在KPVD机场的5号跑道上,先不要起飞。
2. 查仪表飞行航图上KMVY机场MVY的VOR台频率是114.5,所以调整无线电设备如图:
?点亮NAV1灯呈绿色,点亮呈绿色后如果VOR1
台收到信号就会有嘟嘟……的莫尔代码声音。右
边有个NAV2灯,点亮它则可以收听VOR2台
信号。不想听声音就再按一次开关。
?调整VOR1台频率到114.5,VOR2台频率117.8。
?把黄色箭头的开关打到R1。此处即是DME测
距设备。因为还停在地面收不到MVY台的信号
所以你暂时看不到它显示距离。
?把VOR1表的OBS旋转到132度,表示截取
MVY台的132度径向线。132度是在上面的航
图里查到的。表里可以看到GS与NAV处有红
白相间的条纹,表示暂时处不到任何信号,一旦
收到,红白条纹即会消失。VOR1显示向台背台
的小三角在NAV那个位置,有信号时会变成小
三角,不注意的话看不到。而GS位置的红白条
纹是用于ILS的。
?把VOR2表的OBS旋转到046度,表示截取SEY台的46度径向线。它可以帮助你确定自己飞过AVONN 点。它没有显示ILS下滑道的功能,故小三角在右边中间位置。
3. 可以起飞。
4. 起飞后上升到2000英尺,未到2000英尺就会间歇地听到莫尔代码那种嘟嘟嘟的长短声,听到声音意
味着你已经收到114.5这个台的信号了。那么如何判断它就是114.5的信号呢?看着航图里MVY台旁边的点划,听莫尔代码声音,对得上号意味着台选择正确。
5. 接下来需要看着VOR表中间指针的变化来飞了。具体怎么飞,需要用到前一章的VOR知识了,此处
如果弄不明白,建议返回上一章再复习一次。需要注意的是,随着距离越来越近,中间指针的灵敏度会越来越大。
6. 观察自己是否到达AVONN点。
?收到VOR1信号后要尽快飞入MVY台的132度径向线(V146航道),察看DME上自己到MVY台的距离(注意开关打在R1档),由航图可知AVONN点距MVY台30海里
?观察VOR2表的竖线是否竖直,也能表明自己到了AVONN点。由航图可知SEY台到AVONN点距离33海里处,所以把DME的开关打到R2档,观察读数是否为33。
7. 上一节航图学习我们知道PVD台到MVY台距离是41海里,所以一切顺利的话此时你与MVY台距离
应小于41。然后该数字会不断缩小,随着数字地变小,KMVY机场应该会渐渐地映入眼帘。数字缩小到0以后又会继续变大,因为那时你已过了台往远离VOR台的方向飞去了。
8. 至此就完成了一次VOR到VOR的飞行。
9. 上面的飞行是从PVD台飞向MVY台,自己尝试从MVY台飞回PVD。然后把时间调到晚上再飞一次,
充分体验仪表飞行的乐趣。
10. 多飞几个类似的VOR到VOR,对后面的学习有好处。
仪表进近航图
如何阅读进近航图
这是美国MANCHESTER机场的35号跑道的VOR进近图。它由美国连邦航空局国家航图办公室制作,它们负责美国管辖的所有机场的航图制作。捷普逊航图则包括了全世界机场且内容更加精准,但捷普逊航图需要花钱购买而连邦航空局的航图可以免费下载。一般在美国的飞行学员都用连邦航空局的航图学习飞行,有需要的再学习捷普逊的图。无论如何这种航图已足够我们模拟飞行使用了。只不过由于游戏发布得早,所以一些导航台有可能与现实航图对不上。
请查找本教程自带的文件:KMHT (VOR RWY 35).pdf。
1. VOR RWY 35:这个图是告诉你怎么用VOR降落该机场35号跑道。
MANCHESTER (MHT):机场代码MHT。(游戏里是四字母代码KMHT)
MANCHESTER, NEW HAMPSHIRE:机场所在城市的名字。
VOR/DME MHT 114.4:降落需要用MHT这个VOR台。
APP CRS 335:进近时的磁航向。
Rwy ldg 7650:可用的跑道长度是7650英尺。
TDZE 265:跑道上飞机触地的位置的高度265英尺MSL。
Apt Elev 266:机场中心点的高度。(“机场中心点高度”与“飞机触地位置的高度”有差别)。
2. MISSED APPROACH:复飞的路线。这个图要求是:直线上升到3500英尺并沿着MHT台的340度
径向线,背台飞到距离该台12海里的SCOOP 点等待指挥。
3. 无线电频率。ATIS:自动终端信息服务。BOSTON APP CON:波士顿进近的频率,民用12
4.9,军用
269.075。MANCHESTER TOWER:塔台频率,民用121.3,军用239.025。GND CON:地面指挥的频率。CLNC DEL:提交接收飞行计划。
4. 将第2点的复飞路线描述出来。图中可以看出等待点SCOOP不仅距离MHT 台12海里,而且该点还
处在频率116.5的PSM(VOR)台的280度径向线上。等待时沿一个像运动场一样的圈转,每一圈都应该经过SCOOP点。
5. 最关键的一个VOR台。与第1点的描述一样。
6. 降落之前需要向相反方向155度飞,再向110度飞,再290度倒回来,然后才能对着MHT台的335
度径向线飞去准备降落。这个转弯就叫“程序转弯”。除非空管有其它指挥。
7. 程序转弯的距离不能超过以MHT台为圆心半径10海里的距离。
8. 最低安全高度。MHT台半径25海里内的高度要求,以此高度飞行可确保你比任何已知障碍物高1000
英尺。此处MHT台即是第5点的MHT台。从不同方向到达这个台的飞机,最低安全高度不一样。9. 机场平面图。
7560x150,9250x150:跑道的英尺长度宽度。
0.3% UP,0.8% DOWN:跑道不是完全水平的。
如果按此图要求飞,那么你会降落35号跑道,箭头
所指的位置。
FAF to MAP 4.3NM:从MHT台开始到复飞点的距
离是4.3海里。
60与4:18:从HMT台开始,若保持60节的速度,
你应该在4分钟18秒后到达复飞点。若保持75节
速度的话多久到达复飞点呢?得事先计算好,降落
前才开始计算就太晚了……
10. 下降剖面图。
1) 飞机先要向155度方向飞并第一次经过
VOR台(图中的VOR/DME),此时它的高
度高于2000英尺。
2) “程序转弯”时高度保持在2000英尺
MSL,数字2000的下划线表示不能飞低于
这个高度,图中2000的位置即是在程序转
弯。程序转弯是怎么转的请看平面图。
3) 程序转弯完成后航向应该是335度,并
在此时开始下降到1600英尺MSL,直到第
二次过VOR台(这里所指的VOR台都是平面图中的114.4“MHT”VOR台)。
4) 当第二次穿过VOR台时,你距离跑道头是4.1海里。穿过后你就背对MHT台飞了,不过背台飞DME
测距机也会显示距离,所以从DME上可以判断自己离跑道还有多远。
5) ABCD代表4种不同类型的航空器,赛斯纳172的进近速度小于90节,属于A类航空器。所以要看
S-35这一栏的A类对应的内容“860/40 595(600-3/4)”:S-35是直接降落35号跑道的意思,全称Straight in to runway 35。当第2次过MHT台后立刻下降到860英尺MSL,860就是最小下降高度“MDA (M inimum D escent A ltitude)”。如果大雾迷漫或者夜黑风高那么未看见跑道或者引进灯前绝对不能低于860,但也不能比860高太多否则会来不及降落。如果距离跑道4000英尺的时候仍看不见跑道就不能降落。595(600-3/4)是军机的标准。
6) 如何知道自己什么时候距离跑道4000英尺呢?DME显示的是海里距离,所以要换算(1 英尺=
0.0001645788336933海里,4000英尺= 0.6583153347732海里)。此时VOR在你后面,而4000
英尺指的是你与前面跑道的距离,所以“4.1海里– 0.6583153347732海里= 3.4海里”,什么时候DME显示3.4,你距离跑道就4000英尺。前提是你严格按照VOR台径向线飞。
7) CIRCLING这一栏是盘旋降落时的标准,全称Circling to land。“880-1”:最小下降高度880英尺,最
少1海里远看见跑道,这里的单位不是英尺了。
8) 复飞的方法,平面图已经有说明。
KCON机场→KMHT机场
以上图片请查找教程附带文件“KCON to KMHT.pdf”。
我们将使用VOR方式降落KMHT机场的35号跑道。进近航图是“KMHT (VOR RWY 35).pdf”。
如上图所示,我们要从KCON机场飞到KMHT机场。发现进近图中使用的VOR台就是上图中的114.4 MHT,所以要截MHT台的155度径向线向着MHT台飞去。
1. 在KCON机场出生并选择任意跑道,把VOR1台频率调到114.4,VOR1表的OBS调155度,然后起
飞。
2. 以下内容请边看KMHT (VOR RWY 35).pdf边学习。
3. 保持3500英尺高度朝着MHT台155度径向线飞去并飞越该台,第一次飞越该台那一刻即为初始进近
点(红色箭头)。当飞机十分接近MHT台时(DME显示小于1海里)VOR表中间指针会明显摆动,此时不要急着去追指针,因为越近越灵敏,追得太紧反而分散你的其它注意力。等飞越MHT台后情况会惭惭好转。
4. 飞越该台那一刻开始计时(用手机的秒表就不错!),继续截155度径向线背对MHT台飞约3分钟后,
左转110度,重新开始计时1分钟,同时把VOR1的OBS调到335度,1分钟时间到就右转290度。
当自己转为290度后,需要注意VOR1表的指针,适时转弯截MHT台335度径向线。转弯完成后按航图规定你的高度必须是2000英尺。
5. 此时你应该对着MHT台飞去了,把高度降至1600英尺并保持,直到第二次飞越MHT台。从现在开
始要让飞机保持稳定,因为机场就在前面。计时3分钟与1分钟的原因就是留出足够空间给你操作,如果你觉得自己技术好可以缩短时间。
6. 当第二次飞越MHT台时(红色箭头),你就算过最终进近点了,此时你必须做好一切着陆准备,速度
是否在规定范围内,襟翼等等……
7. 过了MHT台后,按照航图要求,在背对MHT台2.4海里处下降到不低于860英尺。即便大老远你就
看见机场了,也不能低于860,只能在超过2.4海里后才视情况下降。
8. 过了2.4海里,如果看见下滑道指示灯就按照它的指示下降。看不见就绝对不飞低于860英尺否则后
果自负。
顺着MHT台335度飞,最终会以这个角度看见35号跑道。然后你得自己操作飞机对准跑道。
此图的能见度是3英里。
VOR台建在机场内的情况
上一节讲述的航图,VOR台距离机场有几海里远,属于VOR台不在机场内的情况。现在介绍VOR 台建在机场内的进近航图。请打开教程附带文件:KMVY (VOR RWY 24).pdf 。
在上图中:机场平面图里可以看到VOR台图标。对比上一节的KMHT (VOR RWY 35).pdf近进图,是否发现它们的下降图不一样?KMHT机场的情况是过了MHT台还要4.1海里才到达跑道,而上面的图如果到达VOR台则表示已到复飞点了,因为VOR台就建在机场里,过这个台意味着过机场。降落KMVY 24号跑道,未着陆之前MVY台一直在你前面。从112转回247的时候高度1800,接着下降到580。在距离MVY台1.8海里时高度不低于580。接下去视情况下降。什么时候发现VOR表的小三角朝下而自己还不能着陆——复飞。
KACK机场→KMVY机场
请查找本教程附带文件:KACK to KMVY.pdf,红色线是我的飞行计划。
1. KMVY机场24号跑道的近进航图请查附带文件:KMVY (VOR RWY 24).pdf。我们将使用它来降落。
2. 红色线是我的飞行计划,从KCON机场起飞后,截MVY台300度径向线向MVY台飞。
3. 如红色虚线所示:第一次飞越MVY台后继续飞1分钟,然后向左转,并适时切入MVY台的067径向
线。切入067度是因为近进图的要求。注意是切入114.5 MVY台的067,别用上面图的108.7频率。
4. 顺着MVY台067度径向线飞。第二次飞越MVY时,机场正好在你的正下方,刚好可以观察机场周围
的交通、天气状况(现实中是有意义的,在游戏中也许体现不出来)。
5. 第二次过MVY后,方法类似上一节……计时……程序转弯……按图要求下降高度。
6. 一切顺利你应该在这个方向看见跑道。
VOR-A
以上介绍的VOR进近,VOR的径向线基本对准跑道,飞行员稍微调整即可。但美国有些小机场VOR径向线根本离跑道还很远,只能引导帮助飞行员看见机场而已,剩下的事情需要飞行员靠自己的眼睛完成。这种类型称为VOR-A。请打开附带文件:3B4 (VOR-A).pdf,FSX里有3B4这个机场。VOR径向线很明显穿过跑道中间,至此VOR就完成使命——帮助飞行员发现机场。接着飞行员按需要盘旋降落。
雷达引导与全程序进近的差别
以上介绍的内容均是全程序进近的路线,即没有空管指挥也可以正常降落的方法。如果有空管进行雷达引导,那么飞行路线可能会像下面这样。既然可以用空管来雷达引导,那么为什么还要那些航图呢?因为1.空管的雷达有可能坏掉,2.飞机的无线电设备可能坏掉。
图中绿色线就是雷达引导时空管有可能给你的飞行路线。当设备正常并且有空管的情况下,我们应该优先服从空管的安排,而不是按航图的路线来飞。当然,空管的指挥也会以航图为基础,不会瞎指挥。
程序转弯要注意的地方
如图中所示,所谓112度与292度,其实是指明你要先右转再兜回247度航向,但并不要求严格按照112度292度来飞,你大可以先右转90度再左转270度转回进近航向,所以只要飞行路线大概与红色线一样
即可。但如果按照蓝色线方向飞则是不允许的!
图中的航线从VOR台开始向223度径向线然后右转切入062度径向线。这种情况叫“泪滴形转弯”,因为看起来像眼泪一样,所以叫泪滴形转弯。但凡是这种转弯,就必须严格按照图中所示的航向飞。
微软模拟飞行小飞机基础导航教程 前言 欢迎阅读我的飞行模拟(导航)教程,这篇教程的是以“微软飞行模拟X”为基础制作的,所以阅读学习本教程前你需要先安装“微软飞行模拟X(有的人把它叫‘微软飞行模拟10’)”或者至少“微软飞行模拟2004(有的人把它叫‘微软飞行模拟9’)”。不了解这两个游戏的人可以到百度搜索,相信你很快会找到许多网站论坛,它们你对学习这款游戏很有帮助。论坛上有许多热心人士会解答你的问题(有的甚至是真飞行员),我也从中受益非浅。 如果你是90年以前出生的,一定对美国911的场景记忆犹新,当然部分90后也知道。对于我来说911却与一个游戏联系在一起——微软飞行模拟2002,原因是听说撞大楼的那些家伙用这款模拟游戏练习过(比2002更早的版本)。从2002年到现在我一直因工作、学习和电脑等原因而断断续续玩着这个游戏。一路玩下来发现国内喜欢玩这款游戏的人虽然不多,但还是有少部分人喜欢钻研它,尤其2005年以后。而今随着电脑配置越来越高,国内也在准备开放低空飞行,这类游戏会受到更多人关注。不过它可不是坐在电脑前三两个小时就能学得上手的游戏,说它是游戏因为它永远不能与真实飞行相比,说它难学因为它模拟出了现实飞行中部分情况,可以让没机会学开真飞机的人最大限度明白飞机是如何从甲地飞到乙地。游戏教程国内网上倒是可以搜出许多,有来自真飞行员、有来自游戏玩家、有的讲解得很深刻、有的讲解得很肤浅,但资料十分零散(至少我是这样觉得),而国外的英文资料则比我们丰富许多。所以我决定把我目前了解的知识都写下来,由于我的知识水平有限,时间仓促,错误在所难免,欢迎批评指正。我的邮件地址:silenthunter_chb@https://www.doczj.com/doc/0115479396.html,。 2011年2月发表 2012年6月第1次更新
安24型飞机模拟飞行教程 编写:Sino5322 由于教程是本人根据有限的资料整理而来,所以有些地方难免会有错误,特别是功能介绍和操作程序会与实际存在很多不同,飞友可根据所知所学给予指正,特别欢迎有安24实际飞行经历的老师给予批评指导。 安24型飞机为上单翼支线客机,装有两台АП24涡轮螺旋桨发动机,总功率为5100马力,飞行时速为456公里至470公里/每小时,巡航高度5700米至6000米,可载旅客48人,适用于支线短途运输。
安24飞机机长23.53米,机高8.32米,翼展29.2米,机翼面积74.98平方米,舷展比11.37,平均空气动力弦长2.813米,螺旋桨直径3.9米,最大起飞重量21,000公斤,最大着落重量21,000公斤,客机最大商务载重5500公斤,最大燃油量3950公斤。单台发动机最大功率2550马力。使用起飞最大功率状态时准许使用时间为5分钟,使用额定功率状态时容许使用时间60分钟,巡航状态发动机使用时间不限。【发动机进气道喷水增推系统插件机没有模拟】 FSX中安24型飞机除一般飞行仪表外,还装有ГПК-52航向指示仪,GIK陀螺感应罗盘,АП-28Л自动驾驶仪,航空雷达,两部VOR和NDB无线电导航装置,KLN90B-GPS导航设备。VOR导航设备不提供径向线自动跟踪功能,ILS只能用于进近时辅助飞行员手动着落,不具备自动截获航向道和下滑道功能,安24型飞机没有自动油门全程需手动操作,这也许正是飞行的乐趣所在。 图示分别为NDB信标导航、KLN90B型GPS设备、陀螺感应罗盘 空速的限制 1、紧急下降速度(机动飞行受限)540km/h 2、平飞及下降460km/h 3、长时间飞行380km/ 4、收放起落架时380km/h 5、15°襟翼300km/h 6、38°襟翼250km/h 7、巡航高度5700-6000m 8、最大起飞、着落横风(与跑道成90度)12m/S 9、失速速度(38度襟翼时) 16吨17吨18吨19吨20吨21吨 135km/h139km/h143km/h147km/h151km/h154km/h 10、失速速度(15度襟翼时) 16吨17吨18吨19吨20吨21吨 151km/h156km/h161km/h165km/h169km/h173km/h
—by Rod Machado One of the greatest pleasures a flight instructor can have is to solo a student. Since you are my student, I have the great pleasure of soloing you in this lesson. This is the time in your training where you get to test your mettle in the metal as you take the Cessna 172 around the airport for a single traffic pattern circuit by yourself. Alone. Individually. Unaccompanied. Solo. Let's be clear about how solo works. You'll fly on your own, without any direct help from me, your instructor. It doesn't mean that you fly closer to the ground, as in flying "so low," nor does it mean you'll sing without musical accompaniment in the airplane, although you're certainly welcome to do so if you feel inspired. How you elect to amuse yourself when I'm not with you is your business. I'd like to offer for your consideration that great opera classic, "O Solo Mio." In this lesson your flying performance will be entirely up to you. I will, however, be talking with you via the radio, so I can, in a manner of speaking, air-wave to you. To make this lesson meaningful, I'll provide the directions on when and where to maneuver the airplane. All you have to do is apply the aviation knowledge you've already acquired. Since I'll be speaking with you via radio, I'll tell you when you're cleared for takeoff and give you headings and altitudes to fly that should bring you back for a landing. . . at the same airport from which you departed. I will take you to the left around the airport, in a rectangular traffic pattern, eventually aligning you with Runway 19 for landing. You'll start this lesson by holding in position on Runway 19 at Bremerton airport. You might hear the distant sound of a jackhammer before departure. Don't worry, no one is repairing the runway. It's only the sound of your heart beating, and this is quite normal. This is an exciting event and you should be excited. When we're ready, I'll have you release the brakes, apply power and accelerate. At 55 knots you'll rotate the nose to an initial climb attitude of 10 degrees (Figure 7-1). Thereafter, you'll make slight adjustments in pitch to give you a climb speed of 80 knots. At this point, if you wanted to bellow out a few words to "Please Release Me," this would be appropriate and no one would fault you. So have at it. You'll climb out at 80 knots on a heading of 190 degrees (Figure 7-2) to 1,500 feet, where you'll level off. Lesson 7: Your First Solo Fly This Lesson Now Figure 7-1
1 飞行的基本要素 时代发展到今天,我们对天上飞的飞机已经习以为常。但你真的知道飞机为什么能飞上天吗?如果你不完全了解其中的答案,不必惊慌,我们也不会从最原始的物理基本理论开始讲起,我们只是想帮你了解飞行中的几个关键的基本要素。 推力(Thrust)——推动飞机前进的力量。 阻力(Drag)——环境产生的阻碍物体运动的力量。推力必须要克服阻力,物体才能运动。 重力(Gravity)——地球作用于所有物体、朝向地心的永恒力量。 升力(Lift)——空气通过机翼推动飞机向上运动而产生的力量。 如果飞机获得足够的推力,就可以克服阻力并开始运动。当飞机获得一定的速度后,就会产生足够的升力作用于机翼,并使飞机克服重力而升空。很简单,是吧?这个过程在现实中要稍微复杂一些,但我们现在不必去理会它。 2 飞机的运动轴线 地面上的汽车只有两条平面运动轴线,前后和左右。但飞机有三条运动轴线,多了一个俯仰运动。现在甚至有人认为,飞机比汽车多两条运动轴线,即俯仰运动和滚动,这个问题我们在下文中讨论。 飞行员通过驾驶杆和方向舵踏板来控制飞机沿三条轴线运动。每种运动都有其特殊的称谓,你必须注意这一点,因为这是本节内容的基础。 飞机上的副翼(Ailerons)用于实现飞机的滚动动作,我们称之为“侧滚”(Rolling)。它们可让飞机向机头所指方向运动,从而完成转弯动作。要完成滚动动作,飞行员须根据其需要向左或右移动驾驶杆。 飞机机头沿左右轴线的水平运动我们称之为“偏转”或“侧转”(Yawing),是通过方向舵来实现的。这种运动就像用方向盘控制汽车的运动一样,而实际上,当飞机在地面滑行时,方向舵的功能与汽车方向盘并无二致。方向舵偏左,飞机向左偏转;方向舵偏右,则飞机向右偏转。 飞机沿俯仰轴线的运动控制飞机的升降,我们称之为“俯仰运动”(P itching)。向后拉驾驶杆,飞机机头上仰;向前推驾驶杆,机头则下俯。 3 正负重力(——亦称“过载/负载”) 飞机高速变换方向时,重力(G-forces)就会发生作用。G是Gravitational的缩写,1G代表标准的地球引力。当你驾驶飞机做高速转弯时,你的身体会因为受到阻力的作用而无法随飞机一起运动,而且会向相反的方向运动。如果重力过大(即“过载”),你会出现“黑视”现象(Blackout),并最终导致失去知觉。受过训练的飞行员在特殊装备的帮助下能暂时忍受9G的过载,但那种感觉是非常难受的。 当你驾驶飞机高速俯冲时,你会感受到负载的影响。你的身体会离开座椅,感受到暂时的失重。如果速度非常快,你的大脑会迅速充血,最常见的现象就是脸部通红。人的身体忍受过载的能力要高于负载。
Microsoft Flight Simulator微软模拟飞行,刚开始只是一个计算机图形,作者Bruce Artwick在1976年编写一个关于飞行模拟的3D演示图形。当杂志编辑告诉Artwick有用户感兴趣想购买他的方案,Artwick于是成立subLOGIC Corporation去实现商品化这个想法。起初,新公司通过邮购销售飞行模拟程序,但到1979年1月随着发布Apple II版本后,其他系统的版本接踵而来,并演化成长期的飞行模拟系列。 目录 1 SubLOGIC flight simulators 1.1 第一代(Apple II 和TRS-80) 1.2 第二代(Apple II, Commodore 64, 和Atari 800) 1.3 第三代(Amiga, Atari ST, 和Macintosh) 2 微软模拟飞行 2.1 Flight Simulator 1.0 2.2 Flight Simulator 2.0 2.3 Flight Simulator 3.0 2.4 Flight Simulator 4.0 2.5 Flight Simulator 5.0 2.6 Flight Simulator 5.1 2.7 Flight Simulator for Windows 95 2.8 Flight Simulator 98 2.9 Flight Simulator 2000 2.10 Flight Simulator 2002 2.11 Flight Simulator 2004: A Century of Flight 2.12 Flight Simulator X 2.13 Flight Simulator X: Acceleration 2.14 Microsoft Flight 2.15 Lockheed Martin Prepar3D
该章节描述飞行中的部分力学问题和基础的操纵面做作. 1、飞行中的力 作用在飞机上的力大体可分为以上4种,具体说明如下: 1、升力: 产生:由于机翼上弯下平,导致流过上部的气流需跨越更长的路程。由气流的连续性定理可得,上部气流的速度要快于下部气流,否则就会产生湍流(失速就是由此产生)。 由伯努利定律(流场中流速快的地方压强小,流速慢的地方压强大)得机翼下方的压强大于上方压强。上下的压强差产生升力。 特点:升力与迎角(翼弦与水平方向的夹角,注:翼弦指翼型平行于机身纵轴的弦)、翼型(机翼形状,主要指弯度)及速度有关。就迎角而言,在临界迎角之前,迎角越高升力越大。就翼型而言,机翼弯度越大表面积越大,升力越大。就速度而言,速度越快,升力越大。 2、重力: 产生:地球对物体产生的竖直向下的力。 特点:由飞机质量决定。 3、牵引力 产生:发动机对空气施力过做功,使空气对飞机产生的作用力。 4、阻力 产生:阻力有压差阻力、摩擦阻力、诱导阻力、干扰阻力和激波阻力。这里先介绍前三种。 压差阻力:由迎风面和背风面压强差所产生的阻力(类似推一个被塞住针孔的注射器)。 摩擦阻力:就是一般所说的滑动摩擦力。 诱导阻力:由于空气对机翼产生了升力,所以机翼对空气有一个反作用力,这个力的作用使气流偏转。偏转后的气流会进一步使升力的角度不再垂直于翼弦,而是向后偏一个相同的角度,升力在翼弦方向的分力就是诱导阻力。升力越大,诱导阻力也越大。
干扰阻力:各零件间气流发生干扰产生的阻力(以机翼和机身间的干扰阻力最大)。 2、飞机的旋转轴 3、飞机的基本操纵面 该图介绍了4种操纵面: 1、升降舵:可上下偏转,使飞机绕Y轴做俯仰运动(模拟飞行中由方向键上下控制)。 2、副翼:左右联动,左副翼向下偏,右侧则向上偏,反之亦然。可让飞机绕X轴做滚转运动(模拟飞行中由方向键左右控制)。 3、方向舵:可左右偏转,使飞机绕Z轴运动(模拟飞行中用摇杆的Z轴控制,键盘使用小键区的ENTER和0键)。 4、俯仰运动 (1)升降舵的运动。 当按下键盘下键或将摇杆向后拉时,升降舵会向上运动。反之则向下运动。 该图为升降舵处于中位。 该图中升降舵上偏。 该图中升降舵下偏。 (2)、升降舵运动产生的俯仰运动: 这里仅举升降舵上偏的例子。 由于升降舵上偏,使气流对升降舵产生了垂直翼面向下的力,这个力产生了向下的力矩,使机尾以Y轴向下转动,同时也是机头向上转动。由于迎角增大升力增大,所以在一定范围内,飞机会上升。 5、滚转运动: (1)副翼的运动 当按下键盘左键或向左偏转摇杆时,左侧副翼会上偏,右侧会下偏,反之亦然。 以上是左偏的情况 以上是右偏的情况。
模拟飞行基础教程(5) VOR导航及ILS进场 2012年11月23日 10:13 一、VOR简介 VOR是甚高频全方向无线电信标台的简称,由地面基站向360方向每个方向发射一道无线电波,每束无线电波即称为VOR的幅向,延某束波穿过VOR的直线就是VOR的一条径向线。 利用VOR导航主要是以径向线为参考进行导航的方式。 二、机载VOR设备 图片中列出了三种常见的VOR设备。 红色框中是甚高频接收机,相当于收音机的调频,所不同的是操作方式。这里首先要在右边的备用频率中选好频率,然后按中间的转换键将备用频率与活动频率转换。 蓝色框中的是无线电测距仪,需要注意的是并不是所有的VOR都具有测距功能,所以该仪器主要用来估算过台时间,和做DME弧飞行。测距仪测出的是飞机到VOR的直线距离,所以用该仪器估算过台时间时会大于实际值。 绿色框内是VOR指示器,其中上面那个指示NAV1频率所示的VOR的状态,同时兼有指示ILS功能;下面那个显示NAV2接收的VOR状态,换句话说只有NAV1可以用
来接收ILS(仪表着陆系统)频率。VOR指示器旁边还有个OBS钮,这是用来选择您所要飞的VOR幅向的,比如您将230转到指示器 12点方向,此时纵杆显示的就是方向为230度的径向线与您的相对位置关系了,当纵杆向左偏,就说明径向线在您左边,您应该向左转截获;反之亦然。纵杆下面还有一个小三角,这是提示您是在向VOR台飞行还是背台飞行。三角朝上说明是向台,反之则为背台。 三、利用VOR飞行 1、航前准备 今天我们从首都国际机场36R跑道起飞,之后沿30度径向线飞向怀柔VOR (113.6MHz),然后从怀柔转向,背台飞210度径向线回首都国际机场,使用ILS进场方式降落在18L跑道(ILS频率:109.3MHz)。 首先说下怎么得到VOR频率。打开FS中的地图。VOR会用如下图所示的标志表示。 单击这个标志,通常会有如下窗口,选择属性为VOR的项目,并点OK。
全球四大卫星定位系统 一.GPS系统(美国) 二.北斗系统(中国) 三.GLONASS系统(俄罗斯) 四.伽利略卫星导航系统(欧盟) GPS系统(美国) GPS系统是美国从上世纪70年代开始研制,历时20年,耗资近200亿美元,于1994年全面建成的新一代卫星导航与定位系统。GPS利用导航卫星进行测时和测距,具有在海、陆、空全方位实时三维导航与定位能力。它是继阿波罗登月计划、航天飞机后的美国第三大航天工程。如今,GPS已经成为当今世界上最实用,也是应用最广泛的全球精密导航、指挥和调度系统。 GPS系统概述GPS系统由空间部分、地面测控部分和用户设备三部分组成。 (1)空间部分GPS系统的空间部分由空间GPS卫星星座组成。 (2)控制部分控制部分包括地球上所有监测与控制卫星的设施。 (3)用户部分GPS用户部分包括GPS接收机和用户团体。 主要功能: 导航 测量 授时
标准:全球定位系统(GPS)测量规范GB/T 18314-2001 Specifications for global positioning system (GPS) surveys 种类: GPS卫星接收机种类很多,根据型号分为测地型、全站型、定时型、手持型、集成型;根据用途分为车载式、船载式、机载式、星载式、弹载式。 北斗卫星导航系统 中国北斗卫星导航系统(BeiDou Navigation Satellite System, 统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。 段和用户段三部分组成,可在全球范围内全天候、全天时为各类用户 度0.2米/秒,授时精度10纳秒。 系统构成 北斗卫星导航系统空间段由5颗静止轨道卫星和30颗非静止轨 道卫星组成,中国计划2012年左右,“北斗”系统将覆盖亚太地区,
模拟飞行指令 暂停P or BREAK(BREAK) 全屏模式ALT + ENTER(回车键) 菜单显示/隐藏ALT ATC菜单显示/隐藏`ACCENT(`重点符号) or SCROLL LOCK (SCROLL LOCK键)膝板显示/隐藏SHIFT+F10 声音开/关Q 重置当前飞行CTRL+; (分号) 保存飞行; (分号) 退出飞行模拟CTRL+C 立即退出飞行模拟CTRL+BREAK(BREAK键) 摇杆(禁用/使用)CTRL+K 全球坐标/帧频SHIFT+Z 选择第一个1 选择第二个2 选择第三个3 选择第四个4 选择时间压缩R 空投物资SHIFT+D 请求加油车SHIFT+F 航空器标签显示/隐藏CTRL+SHIFT+L 飞行技巧显示/隐藏CTRL+SHIFT+X 增大选择= (等号) 缓慢增大选择SHIFT+= (等号) 缓慢减小选择SHIFT+- (减号) 减小选择- (减号) 捕获截图V 登机桥廊对接/分离CTRL+J 结束飞行ESC 飞机控制指令 副翼左倾斜数字键盘4 副翼右倾斜数字键盘6 副翼左配平CTRL+数字键盘4 副翼右配平CTRL+数字键盘6 垂直尾翼左偏航数字键盘0 垂直尾翼右偏航数字键盘ENTER(回车键) 垂直尾翼左配平CTRL+数字键盘0 垂直尾翼右配平CTRL+数字键盘ENTER(回车键) 副翼或垂直尾翼居中数字键盘5 水平升降舵向下数字键盘8
水平升降舵向上数字键盘2 升降舵向下配平数字键盘7 升降舵向上配平数字键盘1 襟翼完全收起F5 襟翼缓慢收起F6 襟翼缓慢伸出F7 襟翼完全伸出F8 扰流板/减速板开/关/ (正斜线) 扰流板预位SHIFT+/ (正斜线) 水舵收/放CTRL+W 发动机控制指令 对于多引擎飞机上,除非你先按下E+引擎号(1-4)选择单个引擎,否则你的操作将对所有引擎生效。要恢复对所有引擎的控制,先按住E,然后快速连续地按下所有引擎号(E, 1, 2,…等等) 选择引擎E+引擎编号(1-4) 选择所有引擎E+1+2+3+4 自动启动引擎CTRL+E 切断节流阀(节流阀就是油门) F1 反冲力(涡扇发动机/喷气发动机) F2 (按住且保持) 降低节流阀F2 or数字键盘3 增加节流阀F3 or数字键盘9 节流阀最大F4 螺旋桨低转速CTRL+F1 降低螺旋桨转速CTRL+F2 增大螺旋桨转速CTRL+F3 螺旋桨高转速CTRL+F4 油气混合比设置为慢车低油状态CTRL+SHIFT+F1 减小油气混合比CTRL+SHIFT+F2 增大油气混合比CTRL+SHIFT+F3 油气混合比设置为高油量状态CTRL+SHIFT+F4 引擎除冰开/关H 磁电机选择M 选择主用电池组或者交流发电机SHIFT+M 选择喷气发动机启动器J 直升机旋翼离合器开/关SHIFT+. (句点) 直升机旋翼调节器开/关SHIFT+, (逗点) 直升机旋翼制动器开/关SHIFT+B 增加选择项目= (等号)
(1)姿态仪。该仪表用于反映飞机的姿态变化(如俯仰角度及倾斜角度)。在姿态仪中蓝色代表天,深色代表地面,中间的白线代表地平线。当飞机上仰时,姿态仪中的小飞机(橘红色)向上移动,当小飞机处于人工地平线上方时,代表飞机的仰角为正,蓝色部分的小黑线表示俯仰角度,依次为5度、10度……当飞机向左倾斜时,小飞机会相对人工地平线左倾相同角度,姿态仪最上方的橘红色三角形指示位置即为倾斜角度(最中央白线为0度,向外依次表示5度、10度、15度、30度)。 (2)速度表。该表显示的是指示空速,指示空速是由吹入动压空的气流压强和静压孔测得静态空气压强的差值得出的,当飞机处于标准海平面气压中指示空速就等于真空速。指示空速的单位是节。此外讲解以下几个速度的不同: 1)指示空速(如上) 2)真空速:飞机相对周围气体的速度,粗略数据可由指示空速换算得来。3)地速:飞机相对地面的速度,可由真空速加上风速得出。 4)马赫数:真空速与相应条件下音速的比值。 再来了解下速度表上各速度的标示: 1)最外圈白色范围表示进行襟翼操纵的速度范围,其中注意襟翼操纵范围的最小值也就是飞机在着陆形态下的最小可操纵速度Vso。 2)绿色部分表示在不放襟翼(或称光洁形态)时的操纵范围,其最小值就是飞机在光洁形态下的最小操纵速度Vs。
3)黄色部分表示超过正常巡航/操纵范围的速度,其与绿色部分大交点也就是正常巡航最大速度,称为Vno 4)最后的红色部分表示飞机结构设计的极限速度Vne,在所有飞行中都不应超过该速度。 最后发现忘了说一点,速度表的单位是节! (3)高度表。飞机上主要用的是气压高度表,该高度表通过测量飞机所在高度的气压与海平面气压的差值得出高度。需要注意的是在飞行中需要依情况转换高度表修正值(海平面气压状态),例如当机场处修正海平面气压为29.83英寸汞柱时,就需转动高度表左下方的旋钮时表盘右侧的气压值窗口的示数达到29.83。在转换高度之上(美国是18000英尺,中国一般是9800英尺,若由于实际情况变化会予以通告)高度表应拨为标准海平面气压29.92英寸汞柱。在转换高度以下应拨为当地的机场气压或修正海平面气压(具体哪一个随地区和法规变化)。游戏中高度表可按B键自动拨正。 接下来说表盘本身,高度表有两个指针,一个较短称为千英尺指针,它所指的示数应乘以1000后阅读;另一个较长称为百英尺指针,它所指的示数应乘以100阅读。一般来说高度表的阅读是找到千英尺指针逆时针方向的第一个大格(标了号的),用这个值乘以1000,再加上百英尺指针读数乘以100的数值就是高度表示数了。注意该表单位为英尺。 (4)转弯侧滑仪。该表反映了飞机转弯的角速度和侧滑程度。表的上部分的小飞机反映飞机转弯的角速度,当飞机开始转弯时小飞机会倾斜,其倾斜程度反映角速度,倾斜越陡角速度越大。在L和R附近各有一条小白线,这条线表示飞机正以标准角速度(3度/s,注意是度不是弧度!)转弯。 表的下部分的小球表示飞机的侧滑程度,当飞机的向心力不足或过大时就会出现侧滑,若飞机发生左侧滑,小球就会向右侧滚,反之亦然。发生侧滑时,应当向小球滚动方向偏转方向舵使小球保持在中央(某些地方称之为踩球)。 (5)磁罗盘该罗盘指示了飞机所对的方向。罗盘上每一个刻度表示1度,NSEW 表示相应的方位。小飞机机头所对的方向就是飞机所对的方向。 (6)升降速率表。该表反映了飞机上升或下降的快慢。表上的示数应乘以100阅读,单位为英尺/分。仪表上半部分表示上升率,下半部分表示下降率。在+-1000英尺/分以内的每个刻度的分度值为100。 以上6个仪表就是所说的六大仪表。 (7)发动机转速表,单位是百转/分,红色部分不得超过。 2、平直飞行。 平直飞行是最基本的飞行动作,但要做到完美还是需要很多练习。首先假设你有办法让飞机升空(可以按Y键再按F4键,到合适高度再按Y键以达到练习高度),并假设你可以操纵飞机(补充一个操作,增大发动机转速按F3键,降低按F2键,收慢车按F1键,将转速增到最大按F4键)。此时你需要: 1)稳定一个合适的发动机转速; 2)操纵副翼(意味着要同时使用方向舵消除偏航)让飞机处于水平状态,航向没有任何偏转; 3)操纵升降舵使飞机的升降速率为零。 这样你的飞机就处于了直线飞行状态。如果还要加大难度就是让飞机的仰角为零,同时保持飞机直线飞行(这需要及时调整发动机转速)。
apm飞控较为详细的入门教程 超详细的APM飞控介绍教程,赶紧收了,不错。 APM飞控详细入门教程 目录 一、硬件安装 (1) 二、地面站调试软件Mission Planner安装 (1) 三、认识Misson Planner的界面 (2) 四、固件安装 (3) 五、遥控校准 (6) 六、加速度校准 (8) 七、罗盘校准 (16) 八、解锁需知(重要) (18) 九、飞行模式配置 (18)
十、失控保护 (19) 十一、命令行的使用 (20) 十二、APM飞行模式注解 (23) 十三、APM接口定义说明 (25) 十四、apm pid 调参的通俗理解 (26) 十五、arduino的编译下载最新固件 (28) 俺是收集整理的哦,原作和原文来源 感谢yl494706588 最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了 一、硬件安装 1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限;
条件允许请尽量使用一个减震平台来安装APM主板; 3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。使用建议 对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、APM各类高阶应用 二、地面站调试软件Mission Planner安装 首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。MSI为应用程序安装包版,安装过程中会同时安装APM 的USB驱动,安装后插上APM的USB线即可使用。ZIP版为绿色免安装版,解压缩即可使用,但是连接APM后需要你手动安装APM的USB驱动程序,驱动程序在解压后的Driver文件夹中。
简单对比全球四大卫星导航系统 2011年12月27日,对于中国的高精度测绘定位领域来说是一个不平凡的日子,中国北斗卫星导航系统(CNSS)正式向中国及周边地区提供连续的导航定位和授时服务,这是世界上第三个投入运行的卫星导航系统。 在此之前,美国的全球定位系统(GPS)和俄罗斯的格洛纳斯卫星导航系统(GLONASS)早在上世纪90年代就已经建成并投入运行。与此同时,欧盟也在打造自己的卫星导航系统——“伽利略”计划。 那么,这四大卫星导航系统之间到底有着怎么样的区别和联系呢?下面,就让我们来逐个分析一下,通过四大卫星导航系统的优劣分析,给大家一个较为明显的概念。 四大卫星导航系统各有优势,详情如下: GPS:成熟 GPS,作为大家最为熟悉的定位导航系统,她最大的特点就是技术方面最为成熟。 美国“全球定位系统”(GPS),是目前世界上应用最广泛、也是技术最成熟的导航定位系统。GPS空间部分目前共有30颗、4种型号的导航卫星。1994年3月,由24颗卫
星组成的导航“星座”部署完毕,标志着GPS正式建成。 中国北斗:互动开放 北斗卫星导航系统是中国正在实施的自主发展、独立运行的全球卫星导航系统。系统建设目标是:建成独立自主、开放兼容、技术先进、稳定可靠的覆盖全球的北斗卫星导航系统。北斗卫星导航系统由空间段、地面段和用户段三部分组成。目前市面上定位导航仪器公司如国外的天宝、拓普康,国内的华测导航等都已支持北斗卫星导航定位系统。 欧盟伽利略:精准 伽利略定位系统是欧盟一个正在建造中的卫星定位系统,有“欧洲版GPS”之称。伽利略定位系统总共发射30颗卫星,其中27颗卫星为工作卫星,3颗为候补卫星。该系统除了30颗中高度圆轨道卫星外,还有2个地面控制中心。 俄罗斯格洛纳斯:抗干扰能力强 早在美苏冷战时期,美国和苏联就各项技术特别是空间技术方面争锋相对,在美国GPS技术遍布全国的同时,苏联也没闲着,一直忙于研发自己的全球导航定位系统。俄罗斯的这套格洛纳斯系统便是其不断努力的结果。格洛纳斯由24颗卫星组成,也是由军方负责研制和控制的军民两用导航定
Cessna仪表自动本场五边飞行教程 FSXCN-1205 王达 各位飞友,大家好!很高兴再次和大家一起探讨飞行技术。上一次课我们学习了目视手动本场五边飞行,不知大家在训练中摔坏了多少可怜的飞机,呵呵,言归正传,我们今天的课程,是仪表自动本场五边飞行。 在我们开始飞行之前,我们来了解一下什么是仪表飞行、什么是自动飞行。仪表飞行规范(IFR)和目视飞行规范(VFR)相对应,所谓仪表飞行,就是利用地面的无线电设备和机载的电子设备,对飞机进行导航的飞行。显然,在真实世界中,仪表飞行多用于目的地明确的航线飞行,而目视飞行多用于救援、灭火、农业、航拍。 简单介绍一下我们这次飞行,我们这次飞行即将在我家乡的长春龙嘉国际机场(ZYCC)展开,需要注意的是,我的FSX中安装了中国机场包,所以您游戏中的ZYCC可能还是长春以前的大房身机场,不过没关系,飞行都是一样的。今天的飞行依然是本场五边飞行,不过这次使用的是仪表飞行,通过仪表飞行规则进行本场五边飞行非常简单,需要涉及的频率只有一个,那就是降落跑道的ILS频率。这个频率可以在“地图”中,点击那个绿色的大箭头,然后就可以看到啦,这个频率一般在100-120MHz之间。一定要把它记下来。 什么是ILS呢?ILS,是Instrument Landing System的缩写,即“仪表着陆系统”,具体的定义我们可以去查有关资料,它的作用,就是在跑道的延长线上建立一个虚拟的通道,并且通过仪表指引你或你的自动驾驶仪,让你通过这个通道安全地落到地上。 相信大家等不及了,那我们就开始吧!这次选择在夜晚进行飞行,也正是为了让大家体会到仪表飞行的强大功能。
全球四大卫星导航系统 美国GPS系统 目前世界使用最多的全球卫星导航定位系统是美国的GPS系统。它是世界上第一个成熟、可供全民使用的全球卫星定位导航系统。该系统由28颗中高轨道卫星组成,其中4颗为备用星,均匀分布在距离地面约20000千米的6个倾斜轨道上。 俄罗斯格洛纳斯系统 格洛纳斯是前苏联国防部于20世纪80年代初开始建设的全球卫星导航系统,从某种意义上来说是冷战的产物。该系统耗资30多亿美元,于1995年投入使用,现在由俄罗斯联邦航天局管理。格洛纳斯是继GPS之后第2个军民两用的全球卫星导航系统。 欧洲伽利略系统 伽利略系统是欧空局与欧盟在1999年合作启动的,该系统民用信号精度最高可达1米。 计划中的伽利略系统由30颗卫星组成。2005年12月28日,首颗实验卫星Glove-A发射成功,第2颗实验卫星Glove-B在2007年4月27日由俄罗斯联盟号运载火箭于哈萨克斯坦的拜科努尔基地发射升空。 中国北斗系统 北斗全球卫星定位导航系统由5颗静止轨道卫星和30颗非静止轨道卫星组成,提供开放服务和授权服务两种模式。根据系统建设总体规划,2020年左右,建成覆盖全球的北斗卫星导航系统。 2011年4月10日,我国成功发射第八颗北斗导航卫星,标志着北斗区域卫星导航系统的基本系统建设完成,我国自主卫星导航系统建设进入新的发展阶段。从当初的“最高机密”,到今日向民用市场推广,北斗计划已经走过了20多年。曾经的主力科学家已经成了白发苍苍的院士,北斗系统的理论创始人也已经故去。4月10日4时47分,我国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第八颗北斗导航卫星送入太空预定转移轨道。这是一颗倾斜地球同步轨道卫星。这颗卫星将与2010年发射的5颗导航卫星共同组成“3+3”基本系统(即3颗GEO卫星加上3颗IGSO卫星),经一段时间在轨验证和系统联调后,将具备向我国大部分地区提供初始服务条件。今明两年,我国还将陆续发射多颗组网导航卫星,完成北斗区域卫星导航系统建设,满足测绘、渔业、交通运输、气象、电信、水利等行业,以及大众用户的应用需求。 中国卫星导航系统管理办公室负责人冉承其介绍,目前,北斗卫星导航系统正按照“三步走”发展战略稳步推进第一步,2003年建成北斗导航试验系统。系统由三颗地球同步静止轨道卫星和地面系统组成,可为我国及周边地区的中、低动态用户提供定位、短报文通信和授时服务,已应用于水利、渔业、交通、救援等国民经济领域,经济和社会效益显著。第二步,2012年左右,将建成由10余颗卫星组成的北斗区域卫星导航系统,具备覆盖亚太地区的服务能力,采用无源定位体制,具有定位、导航、授时以及短报文通信功能。第三步,2020年左右,建成由30余颗卫星组成,覆盖全球的北斗全球卫星导航系统,系统性能达到同期国际先进水平。 北斗卫星导航系统除了能够提供高精度、高可靠的定位、导航和授时服务,还保留了北斗卫星导航试验系统的短报文通信、差分服务和完好性服务特色,是我国经济社会发展不可或缺的重大空间信息基础设施。
0.引言 GPS的投入运行对当今社会经济、军事产生了革命性影响,各个国家对它的依赖性不断加大。同时,为了避免受制于人,各国纷纷研制自己的全球卫星导航系统。紧随美国之后,俄罗斯建成了GLONASS 系统,但由于资金长期短缺以及其他种种原因,导致在轨工作卫星曾大量空缺,不能提供全天候、全球性的定位服务。而欧盟正在开发的伽利略(GALILEO)卫星导航系统是一个独立的,性能优于GPS,与现有全球卫星导航系统具有互用性的民用全球卫星导航系统。争奇斗艳的全球卫星导航定位系统将会给当今的信息社会带来深远的影响。 1.美国GPS的发展现状 1.1GPS导航定位原理GPS是在美国海军导航卫星系统的基础上发展起来的以卫星为基础的无线电导航定位系统。它具有全能性、全球性、全天候、连续性和实时性的导航、定位和定时功能,能为用户提供精密的三维坐标、速度和时间。 GPS系统由空间卫星星座、地面监控系统及用户设备组成。GPS 空间星座部分由24颗GPS卫星(含3颗备用卫星)组成,卫星均匀分布于倾角为55°的6个轨道面上,轨道平均高度约为20200km。每颗GPS卫星发射两个载波(1575.42MHz/L1和1227.60MHz/L2)信号,在其上用相位调制技术加载了测距码和导航电文,供用户接收机使用。地面监控系统由一个主控站、3个注入站和5个监控站组成,其主要功能是采集数据、编算GPS导航电文及系统维护等。用户设备是实现GPS卫星导航定位的终端设备,由GPS接收机硬件和数据处理软件组成,它通过接收并处理GPS卫星信号,可得到用户的时间、位置、速度等参数[1][2]。 1.2GPS自身的缺陷 现行的GPS系统存在如下的缺陷:BlockⅡ(BlockⅡA)GPS卫星信号的强度极其微弱(天顶运行的GPS卫星的信号强度仅有3.5E-16W),几乎淹没于背景噪音之下,并能被建筑物等阻挡物反射,产生多路径效应。 调制于L1载波上的C/A码和P码都位于L1的中心频带,易于受到人为干扰。通常情况下,对P码的捕获和跟踪是通过先捕获C/A码和巧用Z计数的方法实现的。这样,如果人为地干扰C/A码的接收,也就等效于P码受到干扰。 民间用户难以同时获得L1-P码伪距和L2-P码伪距,无法实现GPS双频观测的电离层效应距离偏差改正,限制了GPS单点定位精度的提高。 GPS的系统组成和信号结构都不能满足当前的需要。例如:在高纬度地区,严重影响导航和定位,在中、低纬度地区,每天总有两次盲区、每次盲区历时20~30分钟,盲区时,PDOP值远大于20,给导航和定位带来很大的误差。 为确保导航定位的精度,GPS的卫星导航电文必须每天更新一次,地面监控系统担负着编算和注入导航电文的重要任务,一旦地面监控系统受到破坏,军用和民用用户都不能得到高精度的GPS导航定位服务。 1.3GPS现代化的举措[3] 针对上述情况,GPS执行委员会(IGEB)、GPS顾问委员会(GIAC)和导航学会(ION)召开多次国际会议,讨论GPS现代化的问题。根据GPS 执行委员会有关资料,GPS现代化的主要措施主要有: 取消了GPS SA政策,给民用用户带来了明显的效益。 发射BlockⅡR卫星更换BlockⅡ/ⅡA卫星。与BlockⅡ/ⅡA卫星相比,BlockⅡR卫星在功能上有如下扩充:在L2载波上增设C/A码(或L2C码);在L1和L2载波上各增设一个军用伪噪声码(M码);可根据指令增强L2载波上的P(Y)码、L1载波上的P(Y)码和C/A的功率。BlockⅡR-M卫星的功能更进一步加强:能作卫星之间的距离测量;能在轨自主更新和精化GPS卫星的广播星历和星钟A系数;能进行星间在轨数据通讯,在无地面监控系统干预的情况下,可进行自主导航。 发射BlockⅡF卫星。BlockⅡF卫星除具有BlockⅡR卫星的全部功能外,还在保护波段增加第三民用信号L5(1176.45MHz),并增加了卫星间的数据通道。到2008年6月,GPS在轨卫星共有31颗,其中BlockⅡA卫星13颗,BlockⅡR卫星12颗,BlockⅡR-M卫星6颗。 发射BlockⅢ(GPSⅢ)卫星。目前正在研究未来GPS卫星导航的需求,讨论制定GPSⅢ型卫星系统结构,系统安全性、可靠程度和各种可能的风险。计划在2009年发射GPSⅢ的第一颗实验卫星,2030年完成整个星座的更新。 地面监控系统现代化的措施主要有:给监测站装备数字式GPS 信号接收机和计算机;用分布式结构计算设备替换现有的主计算机;采用精度改善技术建立卫星控制集成网络,完善BlockⅡR卫星的全运行能力;在美国本土(卡纳维拉尔角)增建一个监控站(使监控站增至6个);在范登堡空军基地建立一个备用主控站;增强BlockⅡR卫星的指令和控制能力。 2.俄罗斯GLONASS的发展现状 2.1GLONASS简介 为了应对美国的全球卫星定位系统GPS,前苏联从上世纪80年代初开始建设与美国GPS系统相类似的卫星定位系统GLONASS (Global Orbiting Navigation Satellite System),于1995年12月将其发展成为由24颗GLONASS卫星组成的工作星座。该系统也由空间卫星星座、地面监测控制站和用户设备三部分组成。空间卫星星座为21颗卫星分布在夹角为120°的3个倾角为64.8°轨道面上,另外3颗卫星备用。GLONASS通过两个频率发射导航信号,但它的每颗卫星的频率都不相同。 GLONASS可供国防、民间使用,不带任何限制,也不计划对用户收费,并声明不引入选择可用性(SA)。但由于俄罗斯经济困难,卫星的补充和维护得不到保证,GLONASS在轨卫星曾大量空缺(2000年情况最严重时只剩下6颗卫星),破坏了其星座完整程度,致使该系统的可用性大大下降。 2.2GLONASS的恢复和现代化 GLONASS的危机引起了俄方的重视,俄罗斯认识到“出于国家安全战略的考虑,俄罗斯应该使用本国的GLONASS系统,而非美国的GPS或者是欧洲的GALILEO导航系统”。随着经济复苏,俄政府在本世纪初制定了“拯救GLONASS”的补星计划,并决定启动逐步改善和提高GLONASS性能的现代化改造。 补星和现代化计划共分三个阶段:第一阶段为补充新的卫星以满足GLONASS系统正常运行的最低要求。第二阶段为GLONASS-M计划,即研制新的GLONASS-M卫星。新的GLONASS-M卫星搭载了铯钟,增强了信号的稳定性;改善了信号结构,增加了附加信息;安装了滤波器,消除了1601.6MHz~1613.8MHz以及1660.0MHz~ 1670.0MHz频段的信号干扰;与此同时,其寿命也由原来的3年延长至7~8年;该阶段计划达到18颗在轨运行卫星(包括GLONASS卫星 全球卫星导航系统的发展现状 项鑫1刘红旗2李军杰3 (1.中国地质大学<武汉>地空学院湖北武汉430074;2.平顶山煤业集团土建公司河南平顶山467000; 3.河南城建学院河南平顶山467000) 【摘要】GPS现代化计划提出了更新星座和地面系统、增加第三民用信号L5、增加卫星间的数据通道、发射BlockⅢ(GPSⅢ)卫星等措施,GLONASS正在逐步实施补星和现代化计划,GALILEO可望提供六项更优的服务。分析了全球导航定位系统的发展与应用状况,讨论了导航定位信息的融合情况与应用前景。 【关键词】GPS;GLONASS;Galileo;CNSS;信息融合 66