
发那科机器人备份和恢复的操作指导书一、备份和加载的关系见图1
图1
二、常用文件备份内容:
程序文件(*.TP)
默认的逻辑文件(*.DF)
系统文件(*.SV):用来保存系统设置
I/O配置文件(*.I/O):用来保存I/O配置
数据文件(*.VR):用来保存诸如寄存器数据
三、指导书目录:
1、文件备份
2、文件恢复
3、镜像备份
4、镜像恢复
四、操作步骤示意图
1、文件备份
1.1、把U盘插到示教器上的USB口上。
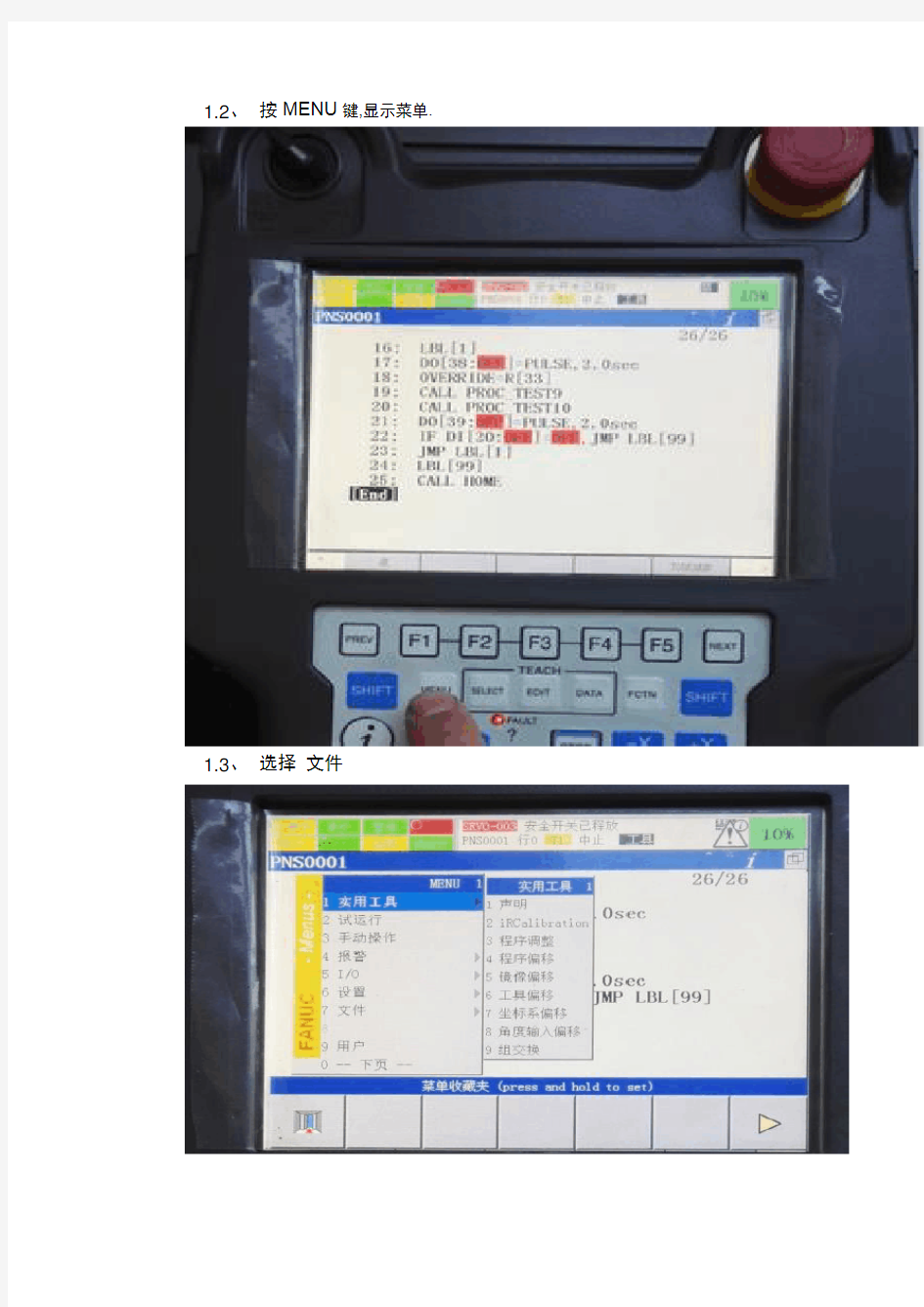
1.2、按MENU键,显示菜单.
1.3、选择文件
1.4、按ENTER
1.5、选择工具
1.6、选择切换设备,按enter,进入如下界面
1.7、选择TP上的USB(UT1:)
1.8、按ENTER进入如下界面,
1.9、然后按工具
1.10、选择创建目录
1.11、按ENTER,进入如下画面
1.12、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹
下图是新建了一个“20170331”的文件夹
1.13、输入完成后,按enter
1.14、按备份,进入如下
1.15、选择以上所有,按ENTER
1.16、屏幕会出现2次类似“删除….?”的字样,按是即可。
1.17、屏幕会显示“正在备份….”的字样,
1.18、备份完成后,会显示下面
1.19、备份就完成了。
2. 加载部分文件或者全部恢复
2.1、设备关机
2.2、把U盘插到示教器上的USB口上。
2.3、同时一直按住PREV前一页+NEXT下一页,不要松开
2.4、设备开机(不能松开手指)
2.5、直到出现CONFIGURATION MENU 菜单,松开手指
2.6、系统会停止在如下画面
2.7、输入3选择CONTROLLED START,按ENTER.
2.8、系统会自动处理
2.9、进入CONTROLLED START模式后,画面如下:
2.10、按MENU键,显示菜单,选择文件
2.11、按ENTER进入如下:
2.12、确认一下当前目录是以上所有备份的文件夹,不是的话,通过选择
上一层目录进行查找
2.13、找到那个以上所有备份的文件夹(如下图是20170331的文件夹)
2.14、按enter进入
2.15、然后选择需要载入的文件后,按加载。(如果需要全部载入的话,
就直接按恢复)
2.16、如果要载入TP程序,可以通过按目录进行分类查找
2.17、选择*.TP
2.18、按enter,会显示所有的TP程序
2.19、选择要加载的程序,按加载,出现如下:
2.20、按是出现如下:
2.21、按覆盖就是用备份的程序覆盖示教器里的程序,并出现如下:
2.22、如果还需加载其他单个程序,步骤相同。
2.23、如果需要批量恢复,按恢复,出现如下:
2.24、选择TP程序
FANUC机器人仿真软件操作手册
2008年10月第1版ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (2) 1.1. 软件安装 (2) 1.2. 软件注册 (3) 1.3. 新建Workcell的步骤 (4) 1.3.1. 新建 (4) 1.3.2. 添加附加轴的设置 (11) 1.4. 添加焊枪,TCP设置。 (16) 1.5. Workcell的存储目录 (20) 1.6.鼠标操作 (22) 第二章创建变位机 (25) 3.1.利用自建数模创建 (25) 3.1.1.快速简易方法 (25) 3.1.2.导入外部模型方法 (42) 3.2.利用模型库创建 (54) 3.2.1.导入默认配置的模型库变位机 (54) 3.2.2.手动装配模型库变位机 (58) 第三章创建机器人行走轴 (66) 3.1. 行走轴-利用模型库 (66) 3.2. 行走轴-自建数模 (75) 第四章变位机协调功能 (82) 4.1. 单轴变位机协调功能设置 (82) 4.2. 单轴变位机协调功能示例 (96) 第五章添加其他外围设备 (98) 第六章仿真录像的制作 (102)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。
如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。 1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口,
发那科机器人备份和恢复的操作指导书 制作人:穆绪刚 一、备份和加载的关系见图1 二、常用文件备份内容: 程序文件(*.TP) 默认的逻辑文件(*.DF) 系统文件(*.SV):用来保存系统设置 ~ I/O 配置文件(*.I/O):用来保存I/O 配置 数据文件(*.VR):用来保存诸如寄存器数据 三、指导书目录: 1、 文件备份 2、 文件恢复 3、 镜像备份 4、 镜像恢复 四、操作步骤示意图 1、 文件备份 1.1、 … 1.2、 把U 盘插到示教器上的USB 口上。 1.3、 按MENU 键,显示菜单. 图1
1.4、选择文件 1.5、按ENTER 1.6、选择工具 ^
1.7、选择切换设备,按enter,进入如下界面 1.8、选择TP上的USB(UT1:) 1.9、按ENTER进入如下界面, 1.10、然后按工具 1.11、选择创建目录
1.12、! 1.13、按ENTER,进入如下画面 1.14、创建备份的文件夹名称,或者直接进入U盘本来就有的文件夹 下图是新建了一个“”的文件夹 1.15、输入完成后,按enter 1.16、按备份,进入如下 1.17、选择以上所有,按ENTER
1.18、、 1.19、屏幕会出现2次类似“删除….”的字样,按是即可。 1.20、屏幕会显示“正在备份….”的字样, 1.21、备份完成后,会显示下面 1.22、备份就完成了。 2.加载部分文件或者全部恢复 2.1、设备关机 2.2、#
2.3、把U盘插到示教器上的USB口上。 2.4、同时一直按住PREV前一页+NEXT下一页,不要松开2.5、设备开机(不能松开手指) 2.6、直到出现 CONFIGURATION MENU 菜单,松开手指 2.7、系统会停止在如下画面 2.8、输入3选择 CONTROLLED START,按ENTER. 2.9、系统会自动处理 ' 2.10、进入CONTROLLED START模式后,画面如下:
FANUC 机器人基本操作指导
1.概论----------------------------------------------------------------------------------------------------------- 1
1)机器人的构成------------------------------------------------------------------------------------------- 1 2)机器人的用途------------------------------------------------------------------------------------------- 1 3)FANUC 机器人的型号-------------------------------------------------------------------------------- 1 2.FANUC 机器人的构成--------------------------------------------------------------------------------- 1
1)FANUC 机器人软件系统------------------------------------------------------------------------------- 1 2)FANUC 机器人硬件系统------------------------------------------------------------------------------- 2
(1). 机器人系统构成------------------------------------------------------------------------------ 2 (2). 机器人控制器硬件--------------------------------------------------------------------------- 2 3.示教盒 TP------------------------------------------------------------------------------------------------- 2 1)TP 的作用------------------------------------------------------------------------------------------------- 2 2)认识 TP 上的键------------------------------------------------------------------------------------------- 3 3)TP 上的开关---------------------------------------------------------------------------------------------- 4 4)TP 上的显示屏------------------------------------------------------------------------------------------- 5
安全操作规程
5
编程
6
1.通电和关电------------------------------------------------------------------------------------------------ 7
1)通电-------------------------------------------------------------------------------------------------------- 7
2)关电-------------------------------------------------------------------------------------------------------- 7
2.手动示教机器人----------------------------------------------------------------------------------------- 7
1)示教模式-------------------------------------------------------------------------------------------------- 7
2)设置示教速度-------------------------------------------------------------------------------------------- 8 3)示教-------------------------------------------------------------------------------------------------------- 8
3.手动执行程序--------------------------------------------------------------------------------------------- 8
4.自动运行---------------------------------------------------------------------------------------------------- 9
iRVision 小结
1.1 Offset 补偿和检测方式 根据iRVision 的补偿和测量方式的不同,iRVision 可作以下分类: 对具体的应用,理解不同iRVision 的特性并选择一个适合的应用是非常重要的。 ● offset 补偿分类 - 用户坐标系补偿 (User Frame Offset) 机器人在用户坐标系下通过Vision 检测目标当前位置相对初始位置的偏移并自动补偿抓取位置。 - 工具坐标系补偿 (Tool Frame Offset) 机器人在工具坐标系下通过Vision 检测在机器人手爪上的目标 当前位置相对初始位置的偏移并自动补偿放置位置。 ● 测量方式分类 - 2D 单视野检测 (2D Single-View) 2D 多视野检测 (2D Multi-View) iRVision 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度R)。其中,用户坐标系必须平行于目标移动的平面,目标在Z 轴方向上的高度必须保持不变。目标在XY 轴方向上的旋转角度不会被计算在内。 - 2.5D 单视野检测 (2.5D Single-View / Depalletization) IRVision 2.5D 比较 iRVision 2D ,除检测目标平面位移与旋转外,还可以检测Z 轴方向上的目标高度变化。目标在XY 轴方向上的旋转角度不会被计算在内。 - 3D 单视野检测 (3D Single-View) 3D 多视野检测 (3D Multi-View) iRVision 3D 用于检测目标3维内的位移与旋转角度变化。 检测目标位置 修正机器人姿态 放置目标 检测目标位置 修正机器人姿态 抓取目标 用户坐标系 工具坐标系 2D 检测 2.5D 检测 3D 检测
实验二 FANUC机器人编程与操作 一、实验目的 1、了解机器人的构成及各组成部分的作用和机器人的用途。 2、掌握机器人的几种坐标系及功能。 3、掌握机器人的编程方式及示教编程。 二、实验设备 FANUC机器人一台(含机械部分和控制部分)、气压站仪态、气动手抓器一个、合金铝块6块。 三、实验原理 1、机器人的构成 机械本体:由6个关节组成,各环节每一个结合处是一个关节点或坐标系。 动力部分:由6台伺服电机分别驱动各关节。 计算机控制部分:用户操作面板、I/O控制接口、示教操作盘、32位CPU。 2、机器人的用途 Arc welding(弧焊),Spot welding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷漆),去毛刺,切割,激光焊接.测量等. 四、实验步骤 1、熟悉机器人的各组成部分及各部分的功能。 2、熟悉机器人的各个坐标系及各坐标系的用途。 图3-1 各坐标系示教
3、熟悉控制面板TP的功能和各个键的作用。见图3-2。 图3-2 示教操作盘 4、A.开机:给机器人的控制柜和气压站上电并打开控制柜和气压站的开关。 将操作面板上的断路器置于ON 接通电源前,检查工作区域所有的安全设备是否正常。 将操作者面板上的电源开关置于ON B.关机 通过操作者面板上的暂停按钮停止机器人 将操作者面板上的电源开关置于OFF 操作者面板上的断路器置于OFF 注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏 5、用TP控制机器人分别在TOOL坐标系、JOINT坐标系、 XYZ 坐标系、USER坐标系下的 运动情况,并分析有什么不同。 6、学习示教编程的过程及原理。
FANUC PaintPro 编程基础培训手册 第一版 作者:罗少华 2011年2月21日
目录 一. 启动Paint PRO‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥3 二. 打开一个现有的work cell‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥4 三. 使用鼠标和键盘将3维空间平移,旋转,放大或者缩小‥‥‥‥6 四. 使用teach pendant移动机器人‥‥‥‥‥‥‥‥‥‥‥‥‥‥8 五. 创建一个新的Work cell‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥9 六. 建立part carrier和跟踪参数‥‥‥‥‥‥‥‥‥‥‥‥‥‥25 七. 给机器人安装喷枪‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥30 八. 载入工件数模‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥33 九. 使用Conveyor控制条 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥34 十. 将现实机器人的程序导入仿真软件‥‥‥‥‥‥‥‥‥‥‥‥35 十一. 创建喷涂程序‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥38
1.启动PaintPRO 1)点击开始按钮,如图一所示。 图一 2)左键点击PaintPRO图标,将出现如图二所示对话框。
图二 2.打开一个现有的workcell 1) 点击工具栏上的按钮,出现类似图三的对话框: 图三 2)双击名字是PaintPRO_Workcell_P‐50的文件夹,出现图四:
图四 3)双击名字是PaintPRO_Workcell_P‐50的图标,Workcell将自动运行打开。 4)如果Workcell中缺少3D数模文件,将显示如图5的信息框,点击OK to All以继续。 图五
机器人密码的解除方法 一、对于IB控制柜: 方法1: 条件:有一台没有设置密码的相同型号的控制柜; 到未设置密码的另外一台控制器上面把SYSPASS.SV文件备份出来; 在要解除密码设置的机器上,按Prev+Next进入CONTRAL START模式,在该模式中 将上步在未设置密码的机器上备份出来的SYSPASS.SV文件导入。然后,退出CONTRAL START模式进入一般操作模式即可。 方法2: 开机的同时按住Prev+Next,进入CONTRAL START模式,在此模式中进行所有文件的备份; 备份完毕后对机器人进行一次初始化启动; 将步骤1中备份下来的文件中的SYSPASS.SV文件删除,然后把剩下的所有文件还原回控制柜中; 如果出现SRVO-038报警,进行SRVO-038报警的消除步骤并做好MASTERING(可改参数或选择适当的方式做MASTERING)。 注意: 在设置密码的机器上,开机进入的是OPRATER权限的界面,默认是QUICK MENU,并且不能进行QUICK/FULL MENU的切换。 不能在一般模式下面进行备份,但可进入CONTRAL START模式中备份和还原。 在INTALL密码登陆后,不能进行密码的DISABLE 和ENABLE。 二、IC控制柜 方法1: 条件:在丢失密码前做过文件的备份; 1
1、将MC备份中的SYSPASS.SV文件删除掉,然后拷进CF卡中; 2、将机器进行一次初始化启动,然后将CF卡中的备份导入即可。 方法2: 条件:能找到INTALL密码。 通过INTALL密码登陆后,可选择下面任何一种方法来做: IB控制柜的方法1做; 重新设置密码; 按以下步骤解除密码: MENU--SETUP--F1 TYPE--NEXT--F3 DISABLE--F4 YES。 注意: 设置过密码后,开机进入的是OPERATER权限界面,但不会默认进入QUICK MENU。OPERATER权限在CONTRAL START模式下面无法做备份/还原。 在INTALL密码登陆后,可进行密码的DISABLE和ENABLE。 2
CONTROL START:(RESTORE) 1,开机,同时按住PREV + NEXT; 2,出现界面: CONFIGURATION MENU 1)HOT START 2)COLD START 3)CONTROLLED START 4)MAINTENANCE SELECT _3 选择3。 3,进入CONTROLLED START模式后:MENU — FILE 出现: TESTSUB LINE 0 AUTO ABORTED FILE\\\\\\\\\\\\\\CONTROLLED\START\MENUS MC:\*.* 1/23 \\1\*\\\\\\\\*\\\(all\files)\\\\\\\\\\\\ 2 * KL (all KAREL source) 3 * CF (all command files) 4 * TX (all text files) 5 * LS (all KAREL listings) 6 * DT (all KAREL data files) 7 * PC (all KAREL p-code) 8 * TP (all TP programs) 9 * MN (all MN programs) 10 * VR (all variable files) Press DIR to generate directory [ TYPE ] [ DIR ] LOAD [RESTOR][UTIL ]> 确定设备项为MC。 (若需要BACKUP,可FCTN —BACKUP/RESTORE进行切换,则以下步骤为BACKUP过程。)
4,选择RESTOR,出现以下内容: SYSTEM FILE TP PROGRAM APPLICATION APPLIC . – TP ALL OF ABOVE 选择需要的项,进行恢复(eg选择ALL OF ABOVE)。 5,跳出RESTORE FROM MEMORY CARD 选择YES 或 NO (YES 继续。NO 停止) 6,恢复完毕,按FCTN – START (COLD)进入一般模式。 (在不使用MAKE DIR时,一张MEMORY CARD 只能备份一台机器。) IMAGE (BACKUP) 1,开机,同时按住F1 + F5 ; 2,出现BMON MENU菜单; 1) CONFIGURATION MENU 2) ALL SOFTWARE INSTALLATION 3) INIT START 4) CONTROLLER BACKUP/RESTORE 5)……
职业教育机电一体化专业教学资源库 技术资料 资料名称:FANUC机器人操作指南 编制人: 邮箱: 电话: 编制时间:2014.11 编制单位:辽宁省交通高等专科学校
目录 机器人程序 (01) 机器人操作 (09) 机器人基本配置 (14)
机器人程序 FANUC机器人程序分为TP、MACRO、CAREL几种类型。 TP为一般程序,用示教器可以创建、编辑、删除。 MARCO为宏程序,在设备调试完成后一般无需添加和编辑,需要时宏程序也可在示教器上创建、编辑、删除。 CAREL为系统自带程序,操作者没有编辑权限。 ◎Fanuc机器人使用Style方式调用程序,主程序名即为Style X ,标准见表1-1。 6: !******************************** ; 7: !ECHO STYLE ; 8: TIMER[1]=RESET ;(定时器1复位) 9: TIMER[1]=START ;(定时器1启动) 10: GO[1:Manual Style Select]=10 ; 11: RESET WS 1 ; 12: CALL POUNCE1 ; 13: CALL S10PROC1 ; 焊接子程序 14: RUN CAP_WEAR ; 15: MOVE TO HOME ; 16: TIMER[1]=STOP ; 17: WAIT (F[1:Capwear Complete]) ;
表1-1 机器人Style程序标准
◎焊接子程序S(X)PROC(X)命名,如S10PROC1,其中S10代表被STYLE10调用,PROC1即为焊接PROCESS。 1: !******************************** ; 2: !STYLE10: PROCESS1 ;(车型10:焊接程序1) 3: !******************************** ; 4: !SAIC Motor ;(上海汽车集团) 5: !Station RBS010 Robot 1 ;(工位RBS010机器人1) 6: !PROGRAM W261 ;(程序W261) 7: !******************************** ; 8: !BEGIN PROCESS - PATH SEGMENT ; 9: SET SEGMENT(50) ; 10: UTOOL_NUM=1 ; 11: UFRAME_NUM=0 ; 12: PAYLOAD[1] ; 13:J P[1] 100% CNT100 ; 14:J P[2] 100% CNT100 ; 15:J P[3] 100% CNT100 ; 16:J P[4] 100% CNT50 ; 17:J P[5] 100% CNT50 ; 18:L P[6:w261bs1115] 2000mm/sec FINE 焊点号,将机器人光标移到P[X]上,点击ENTER键即可编辑。
Fanuc机器人操作大众标准 前言 引用机器人运行的标准,其目的在于阐述在大众公司普遍适用的标准。因为在不同的使用情况下会有各自的标准,所以在各自的工厂或车间里会存在着一些细微的标准上的差异,但大体上是相同的。 这个标准并没有特别完整的要求,随时都有可能改变。如果在一定的特殊情况下,不能遵循这个标准,请在主管部门(E-Planung规划部,机器人系统部或者负责保养维修的部门)一致协商和约定下进行改动。 则 在机器人操作中由SPS-干运行对其进行支持。 不是在点与点之间激活SPS指令,而是在P-SPS上把行驶条件激活. 所有需要用到的焊钳必须在预定的宏程序中使用,在主程序开始之前将其配置上. 在主程序或子程序的产生或调整过程中,必须对每个机器人进行标准化检测,更确切地说,对他们进行一次新的初始化. 基本上每次调整都是在明确的可生产的情况下进行. 用6点法确定工具坐标和工具碰撞方向(X). 需要注意的是,固定焊枪的极臂和地底板成一定的角度,角度A,B,C所测量出来的值如果在5度以内被至成整数. 所有的模具在安装前先进行检测(焊钳,Dock焊钳和夹具更换系统等等).模具在组装前必须进行一个不用工具和Dock系统等的定位校准. 由机器人对工具的尺寸,重心和惯性进行检测.检测出来的结果必须输入到(Menue,系统,类型,负荷)里.
焊钳外形/配置的确定
·投产 ·在连接的机器人类型上对正在运行的系统进行检测,更确切的说,是通过正确的机器人类型进行检测. 机器人类型:请您按MENUS;数码键0(继续);数码键4(状态);F1(类型);数码键3(ID版本).机器人类型集中在菜单点5下. ·需要注意软件版本的统一情况. 软件版本:请您按MENUS;数码键0(继续);数码键4(状态);F1(类型);数码键3(ID版本).软件版本在菜单点"Fanuc搬运工具"和"软件编辑号码"下. ·在机器人操作设备或其他合适的辅助工具的帮助下,对系统上所有工具的(TCP)进行测量(焊钳,夹紧器和外部TCP's). ·用6点法确定工具的坐标和工具碰撞方向(X). 需要注意的是,固定焊枪的极臂和底板成一定的角度,角度A,B,C所测量出来的值如果在5度以内被至成整数.
FANUC机器人培训总结 经过一个星期的培训,让我对FANUC机器人有了更深的了解,一下事我在这一周内学到的知识。 一、机器人系统的组成: 由机器人、控制柜、系统软件及周边设备组成。 二、坐标介绍: JOINT:J1、J2、J3、J4、J5、J6。 XYZ:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合) TOOL: 三、坐标系设置 一、工具坐标系 定义:直角坐标系定,定义TCP点的位置和姿态 1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(toolcenterpoint)。 2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系, 它被存储于系统变量$MNUTOOLNUM。 3、设置方法 三点法 六点法 直接输入法 二、用户坐标系 定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。 1、可于任何位置一任何方法设置的坐标系。 2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。 3、设置方法 三点法 四点法
直接输入法 四、程序的管理 一、创建程序 1、按select键显示程序目录画面; 2、选择f2create(创建); 3、移动光标选择程序命名方式,在使用功能键(F1-F5)输入程序名; 4、按ENTER键确认。按F3EDIT进入编辑界面。 二、选择程序 1、按SELECT键显示程序目录画面; 2、移动光标选中需要的程序; 3、按SETER键进入编辑界面。 三、删除程序 1、按SELECT键显示程序目录画面; 2、移动光标选中要删除的程序名 3、按F3DELETE键出现delectok?; 4、按F4YES,即可删除所选程序。 四、复制程序 1、按SELECT键显示程序目录画面; 2、移动光标选中要被复制的程序名; 3、若功能键中COPY项,按NEXT键切换功能键内容; 4、按F1COPY; 5、移动光标选择程序命名方式再使用功能键(F1-F5)输入程序名; 6、程序名输入完毕,按ENTER键确认。会出现copyok? 7、按F4YES键,即可。 五、查看程序属性 1、按SELECT键显示程序目录画面;
FANUC系列机器人编程作业指导 此篇机器人编程操作指导,主要是针厨房电器公司所生产的产品,而编程则主要运用到直线焊接。本篇编程作业指导贯彻了直线编程的每一步骤,包括编程中要注意到的细节问题,编程的快速技巧问题等等。 一、进入编程界面 如右图所示:为激光发出 器的开关按钮,在编程前, 必须打开激光发出器以及 手动操控界面开关按钮, 开机步骤如右图所示:第 一步:打开“能量”按钮; 第二步:打开“总能量” 按钮;第三步:打开“开 始”开关按钮。 二、确认激光发出器界面参数 激光发出器内部标准参数如下图: 第一步 第三步 第二步
三、 创建编程文件 在操控界面打开过后,首先先选择程序选择界面(SELECT ),进入程序界面后,然后选择F2按键,即要求创建一个新的程序命令,如下图所示: SELECT 按钮 选择第二条单个字母输入方式,然后相应的从F1,F2,F3,F4,F5按钮中选择字母填 写在Program Name 的空格中,然后连续按ENTER 键,创建完成。 四、 程序编制方法 首先, 脑子里面要对所编制程序的行走路线了然于心,才能快速的编制程序,打个比方,我们现在所要编制的路线如右图: 这个路线需要6个点,但程序需要有8条,其中增加了开激光、关激光指令,移动点的指令为:【序号】J P[1] 30% CNT100;焊接点的指令为:【序号】P[1] 20mm/sec FINE;开激光的指令为DO[20]=ON;关激光的指令为:DO[20]=OFF 。 经过上面的认识,上面所走路线的编程程序为: P[1] 20mm/sec FINE DO[20]=ON P[2]20mm/sec FINE P[3]20mm/sec FINE P[4] 20mm/sec FINE P[5]20mm/sec FINE P[6]20mm/sec FINE DO[20]=OFF
I. 备份/加载的前提条件 (具体操作可按实际情况决定) a. 选择备份/加载的设备: (以选择Memory Card 为例) 步骤:1. 按Menu -7 FILE -F5 UTIL 出现画面1; Set Device :存储设备设置;Format :存储卡格式化;Make DIR :建立文件夹; 画面1 (一).一般模式下的备份/加载
2.移动光标选择Set Device,按 ENTER 确认,出现画面2; 3.选择Mem Card(MC:),按 ENTER 确认,出现画面3;画面 2画面3
b. 格式化存储卡 (以选择Memory Card 为例) 步骤:1. 按Menu -7 FILE -F5 UTIL 出现画面1; Set Device :存储设备设置;Format :存储卡格式化;Make DIR :建立文件夹; 2. 移动光标选择Format ,按ENTER 确认,出现画面2 ; 画面 1 画面2
3. 按F4 YES 确认格式化,出现画面3; 4. 移动光标选择输入类型,用F1-F5输入卷标,或直接按ENTER 确认; 画面3 画面4 输入类型 卷标
c. 建立文件夹 (以选择Memory Card 为例) 步骤:1. 按Menu -7 FILE -F5 UTIL 出现画面1; Set Device :存储设备设置;Format :存储卡格式化;Make DIR :建立文件夹; 2. 移动光标选择Make DIR ,按ENTER 确认,出现画面2 ; 画面1 画面 2
3.移动光标选择输入类型,用 F1-F5或数字键输入文件夹 名(Eg:TEST1),按 ENTER 确认,出现画面3;注:目前路径为:MC:\TEST1\, 把光标移至(Up one level)行,按ENTER 确认,可退回前一个目录如画面4; 选择文件夹名,按ERNTER 确认,即可进入该文件夹;画面 3画面4
FANUC机器人编程标准V1.1.1 1、机器人及外部轴零位校核程序 1.1机器人零位校核程序 编制机器人零位的校核程序,程序名:ROBOT1_ZERO, 多机器人工作站,则顺序命名ROBOT2_ZERO、ROBOT3_ZERO… 使用position reg 61,命名为R1_ZERO,速度为50%、fine,机构只含机器人。 position reg 62、63对应R2_ZERO,R3_ZERO 对于出厂新机器人,在零位没有丢失过情况下,该程序记录机器人六个轴零位机械标记位置。 1.2程序 注释如图 1.2 POSITION REG位置寄存器 1.3 POSITION-REPRE 切换到JOINT,将position detail机器人六个轴都改为0
1.4机器人零位码盘值存储位置 Menu-system-variables-$dmr_grp(1)-$master_coun 1到6显示的值即机器人六个轴码盘值,在第一次开机上电后,拍照保存。 1.5需要清零 menu-system-variables-$PARAM_GROUP-DETAIL-MASTER_POS,将其中所有数据改为0
1.6外部轴零位校核程序 1.6.1外部轴零位设定过程 1.6.1.1旋转外部轴到机械零位标记对齐位置 1.6.1.2menu-system-variables-$master_enable改为1 1.6.1.3menu-system-master/cal 选择2项,ZERO POSITION MASTER,操作前务必确认GROUP对应相应零位需要设定的外部轴。如下图
文件备份/还原 本章内容 1 文件备份/还原设备 2 文件 3 备份文件 4 还原文件 5 CONTROL START 6 IMAGE (BACKUP) 1 文件备份/还原设备 通过机器人控制设备,可以使用下列I/O(备份/还原)设备: 存储卡 设备 标准设置指定使用存储卡。当使用设备的时候,按照下面的步骤去改变I/O(备份/还原)设备。用存储卡备份和读取文件的速度很快,这能够大大的提升工作效率。 通过下面方法改变I/O(备份/还原)设备 步骤 1 按MENUS(菜单)键来显示界面菜单。 2 选择“7 FILE”(7 文件)。文件界面就出现了。 3 按 F5 UTIL键,选择Set Device(设置设备).于是显示出下面的界面。
4 选择使用的I/O(备份/还原)设备。当前选择的I/O(备份/还原)设备的缩写会出现在屏幕的左上角。 缩写 I/O(备份/还原)设备 MC: 存储卡 FLPY:设备 FRA: 在控制器里用来自动备份 F-ROM的区域 存储卡 可以使用flash ATA存储卡和SRAM存储卡。 图8-1 插入内存卡 当使用存储卡时,按照改变I/O(备份/还原)设备的说明来选择存储卡。 2 文件 文件是在R--J3iMODEL B控制器的存储器中的一个存储设备。使用的文件主要有下列类型: 程序文件(*.TP) 缺省的逻辑文件(*.DF) 系统文件(*.SV) 用于储存系统的设置值。 备份/还原(I/O)配置数据文件(*.IO) 用于储存备份/还原(I/O)配置的设置值。 数据文件(*.VR) 用于储存数据,比如一个寄存器数据。 2.1 程序文件 程序文件(*.,MN)包含一系列用于机器人的指令。这些指令被称为程序指令。程序指令包括控制机器人操作,外围设备和每个应用。 程序文件被自动的存储在控制器的C-MOS RAM当中。程序文件的目录被显示在程序选择界面当中(“SELECT”)。 注意
FANUC机器人基本操作指导 1.概论1 -----------------------------------------------------------------------------------------------------------1 -------------------------------------------------------------------------------------------)机器人的构成11 -------------------------------------------------------------------------------------------)机器人的用途21 -------------------------------------------------------------------------------- FANUC机器人的型号3) 2.FANUC机器人的构成1 ---------------------------------------------------------------------------------1 ------------------------------------------------------------------------------- FANUC机器人软件系统1)2 ------------------------------------------------------------------------------- FANUC机器人硬件系统2)2 ------------------------------------------------------------------------------ (1). 机器人系统构成2 ---------------------------------------------------------------------------机器人控制器硬件(2). 2 示教盒TP 3.-------------------------------------------------------------------------------------------------2 -------------------------------------------------------------------------------------------------)1 TP的作用3 -------------------------------------------------------------------------------------------2)上的键认识TP4 ----------------------------------------------------------------------------------------------3)TP上的开关5 -------------------------------------------------------------------------------------------)4 TP上的显示屏 安全操作规程5 编程6 通电和关电1. 7 ------------------------------------------------------------------------------------------------7 -------------------------------------------------------------------------------------------------------- 1)通电7 --------------------------------------------------------------------------------------------------------关电2)2.手动示教机器人7 ----------------------------------------------------------------------------------------- 7 --------------------------------------------------------------------------------------------------示教模式1)8 --------------------------------------------------------------------------------------------设置示教速度2)8 --------------------------------------------------------------------------------------------------------3)示教3.手动执行程序8 --------------------------------------------------------------------------------------------- 4.自动运行9 ---------------------------------------------------------------------------------------------------- .概论一机器人的构成1. ,是由伺服电机驱动的机械机构组成的各环节每一个结合处是一个关节点或坐标系 (见图1)
2008年10月第1版- -. ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (3) 1.1. 软件安装 (3) 1.2. 软件注册 (4) 1.3. 新建Workcell的步骤 (5) 1.3.1. 新建 (5) 1.3.2. 添加附加轴的设置 (11) 1.4. 添加焊枪,TCP设置。 (15) 1.5. Workcell的存储目录 (18) 1.6.鼠标操作 (19) 第二章创建变位机 (21) 3.1.利用自建数模创建 (21) 3.1.1.快速简易方法 (21) 3.1.2.导入外部模型方法 (32) 3.2.利用模型库创建 (42) 3.2.1.导入默认配置的模型库变位机 (42) 3.2.2.手动装配模型库变位机 (45) 第三章创建机器人行走轴 (50)
3.1. 行走轴-利用模型库 (50) 3.2. 行走轴-自建数模 (56) 第四章变位机协调功能 (63) 4.1. 单轴变位机协调功能设置 (63) 4.2. 单轴变位机协调功能示例 (71) 第五章添加其他外围设备 (73) 第六章仿真录像的制作 (76)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。 如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。
1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口, 将此区域的数据Email给上海发那科,我们将 为您向公司本部申请密钥,然后将密钥回发给 您。 将我们提供的密钥填入此处(每 行前面框里打勾才能输入密钥)