ISSN 1000-0054CN 11-2223/N
清华大学学报(自然科学版)J Tsing hua Univ (Sci &Tech ),2011年第51卷第3期
2011,V o l .51,N o .3
19/28
382-389
管道噪声有源控制系统的次级声源和误差传感器位置优化
刘会灯, 邱阿瑞
(清华大学电机工程与应用电子技术系,电力系统及发电设备控制和仿真国家重点实验室,北京100084)
收稿日期:2010-05-05
作者简介:刘会灯(1984—),男(汉),湖北,博士研究生。通信作者:邱阿瑞,教授,E -mail :qiuar @mail .tsinghua .edu .cn
摘 要:基于直流电机运行噪声的特点,对于管道有源噪声控制系统的次级声源和误差传感器位置选择,提出了两种优化策略并给出了物理系统的优化设计结果,通过实验验证了两种优化策略的可行性。在优化后的管道实验平台中使用不同有源噪声控制算法进行管道噪声控制实验,噪声源分别为160~550Hz 的单频率正弦周期信号和基波100Hz ,1—5次谐波的多频率正弦周期信号时,两种优化策略最大的降噪量分别达36.2dB 和26.4dB ,降噪效果显著,表明有源控制系统可以有效降低电机运行噪声。关键词:有源噪声控制;管道;噪声中图分类号:TB 535
文献标志码:A
文章编号:1000-0054(2011)03-0382-08
Position optimization for secondary speaker
and error sensor of duct active noise
control system
LIU Huiden g ,Q IU A rui
(State K ey Laboratory of Control and Simulation of Power System
and Generation Equipments ,Tsinghua University ,
Beijin g 100084,China )
Abstract :Tw o optimized methods w ere developed to determine th e app rop riate positions of the secondary speaker and the er ro r sen sor in
a duct active noise control (ANC )system based on the characteris tics of th e direct cu rren t motor operating noise .Test resu lts on an op timized duct platform w ith various adaptive alg orith ms w ith single tone n oises show that the maximu m s ou nd pressu re reduction is abou t 36.2dB w ith a s ingle frequency 160-550Hz sinusoidal w ave and 26.4dB fo r the firs t to fifth order harmonics sinu soidal w aves w ith a 100Hz fundam en tal frequency primary noises .The significant noise reduction by this duct noise control sys tem indicates how effective the sy stem is fo r reducing motor operatin g noise .Key words :active nois e control ;duct ;acou stics noise
1936年德国物理学家Lueg 在美国专利中[1]首次提出了有源噪声控制(ANC )的基本结构,其思路是检测噪声源信号,经过控制系统产生一个幅值相同,相位相反的抵消声源(也称次级声源),根据声音叠加
原理,从而达到消除噪声的目的。由于受当时电子技术、控制理论等限制,该系统的实现非常困难,在随后
的几十年中,有源噪声控制系统发展也极为缓慢。
直到1981年,Widrow 等首先提出了基于自适应滤波器的管道有源噪声控制系统,并且成功地应用在管道噪声控制中[2]
,有源噪声控制才得到真正意义上的广泛关注和研究。近年来,随着微电子技术、计算机技术、数字信号处理技术、控制理论等科学技术的发展,最小均方算法(LMS )[2]
、递推最小
平方算法(RLS )[3]、快速仿射投影算法(FAP )[4]
以及各种非线性控制算法包括Kalman 滤波器[5-6]、神经网络算法[7-8]、遗传算法[9-10]以及模糊控制[11]等广泛地应用在有源噪声控制系统中。
管道有源噪声控制系统构成最为简单,降噪效果也较为显著。有源噪声控制物理系统设计决定了系统理论上所能取得的最大降噪量,不合理的系统设计可能极大削弱控制系统的降噪性能,甚至可能导致控制系统完全失效。本文参考一台直流电机运行噪声的特点进行管道有源噪声控制系统理论研究。直流电机运行转速为1200~1500r /min 时,电机运行噪声主要为低频机械噪声,声压峰值所对应频率为160~200H z ,与机械转速成正比。
基于电机运行噪声的特点,本文提出两种优化策略进行管道有源噪声控制系统次级声源和误差传感器位置的优化设计,根据实验平台参数,给出了物理系统优化设计的结果。通过实验验证了该理论设计方法的可行性。在优化后的管道实验平台中,使用不同控制算法,对于噪声源为160~550H z 单频率正弦周期信号和基波100H z ,1—5次谐波的多频率正弦周期信号,进行了管道有源噪声控制实验,
DOI :10.16511/j .cn ki .qh dxxb .2011.03.002
刘会灯,等: 管道噪声有源控制系统的次级声源和误差传感器位置优化383
取得了很好的降噪效果。1 物理系统设计
有源噪声控制系统设计主要包括物理系统设计
和控制系统硬件软件设计。物理系统设计决定了控制系统理论上可能取得的最大降噪量,而控制系统硬件软件设计则决定了控制系统多大程度上逼近理论上可能获得的最大降噪量。物理系统设计中最为重要的是次级声源位置和误差传感器位置的选择。1.1 次级声源位置优化
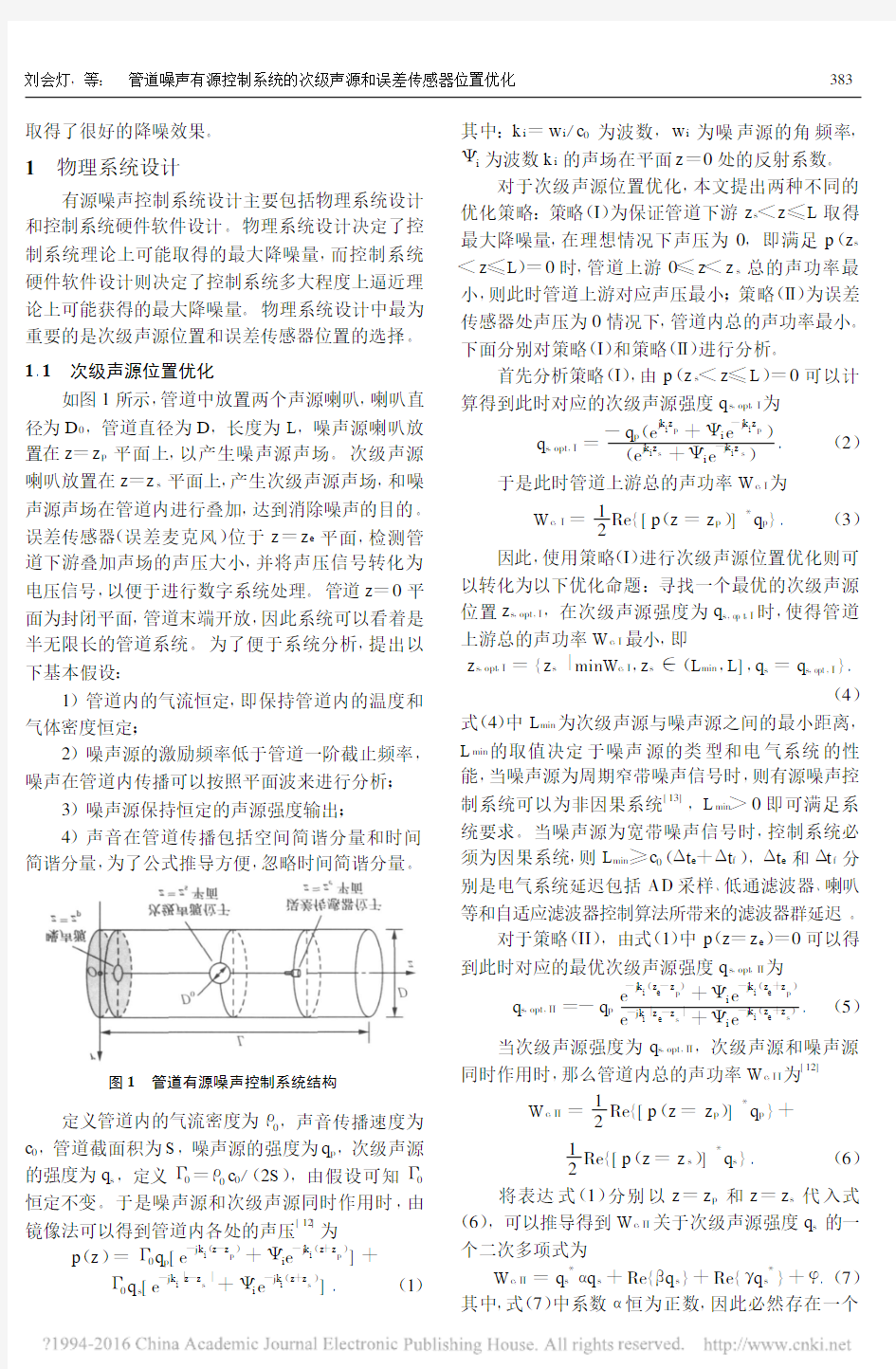
如图1所示,管道中放置两个声源喇叭,喇叭直径为D 0,管道直径为D ,长度为L ,噪声源喇叭放置在z =z p 平面上,以产生噪声源声场。次级声源喇叭放置在z =z s 平面上,产生次级声源声场,和噪声源声场在管道内进行叠加,达到消除噪声的目的。误差传感器(误差麦克风)位于z =z e
平面,检测管道下游叠加声场的声压大小,并将声压信号转化为
电压信号,以便于进行数字系统处理。管道z =0平面为封闭平面,管道末端开放,因此系统可以看着是
半无限长的管道系统。为了便于系统分析,提出以下基本假设:
1)管道内的气流恒定,即保持管道内的温度和气体密度恒定;
2)噪声源的激励频率低于管道一阶截止频率,噪声在管道内传播可以按照平面波来进行分析;
3)噪声源保持恒定的声源强度输出;4)声音在管道传播包括空间简谐分量和时间简谐分量,为了公式推导方便,忽略时间简谐分量
。
图1 管道有源噪声控制系统结构
定义管道内的气流密度为ρ0,声音传播速度为
c 0,管道截面积为S ,噪声源的强度为q p ,次级声源的强度为q s ,定义Γ0=ρ0c 0/(2S ),由假设可知Γ0恒定不变。于是噪声源和次级声源同时作用时,由镜像法可以得到管道内各处的声压[12]
为
p (z )=Γ0q p [e -j k i (z -z p )+Χi e
-j k i (z +z p
)]+Γ0q s [e
-j k i
|z -z s
|
+Χi e
-j k i
(z +z s
)
].(1)
其中:k i =w i /c 0为波数,w i 为噪声源的角频率,Χi 为波数k i 的声场在平面z =
0处的反射系数。对于次级声源位置优化,本文提出两种不同的
优化策略:策略(I )为保证管道下游z s 首先分析策略(I ),由p (z s q s ,opt ,I =-q p (e j k i z p +Χi e -j k i z p )(e j k i z s +Χi e -j k i z s ).(2) 于是此时管道上游总的声功率W c ,I 为 W c ,I =12 Re {[p (z =z p )]*q p }. (3) 因此,使用策略(I )进行次级声源位置优化则可以转化为以下优化命题:寻找一个最优的次级声源 位置z s ,opt ,I ,在次级声源强度为q s ,op t ,I 时,使得管道上游总的声功率W c ,I 最小,即z s ,opt ,I ={z s |min W c ,I ,z s ∈(L min ,L ],q s =q s ,opt ,I }. (4) 式(4)中L min 为次级声源与噪声源之间的最小距离,L min 的取值决定于噪声源的类型和电气系统的性能,当噪声源为周期窄带噪声信号时,则有源噪声控制系统可以为非因果系统[13],L min >0即可满足系统要求。当噪声源为宽带噪声信号时,控制系统必须为因果系统,则L min ≥c 0(Δt e +Δt f ),Δt e 和Δt f 分别是电气系统延迟包括AD 采样、低通滤波器、喇叭等和自适应滤波器控制算法所带来的滤波器群延迟。 对于策略(II ),由式(1)中p (z =z e )=0可以得到此时对应的最优次级声源强度q s ,opt ,II 为 q s ,opt ,II =-q p e -j k i (z e -z p )+Χi e -j k i (z e +z p ) e -j k i |z e -z s |+Χi e -j k i (z e +z s ).(5) 当次级声源强度为q s ,opt ,II ,次级声源和噪声源 同时作用时,那么管道内总的声功率W c ,I I 为 [12] W c ,II =12 Re {[p (z =z p )]* q p }+ 12 Re {[p (z =z s )]*q s }. (6) 将表达式(1)分别以z =z p 和z =z s 代入式 (6),可以推导得到W c ,II 关于次级声源强度q s 的一个二次多项式为 W c ,II =q * s αq s +Re {βq s }+Re {γq * s }+φ.(7)其中,式(7)中系数α恒为正数,因此必然存在一个 384 清华大学学报(自然科学版)2011,51(3) 最优的次级声源输出强度,使得总声功率W c ,II 最小。将q s =q s ,opt ,II 代入式(7),就可以把W c ,II 转化为关于次级声源位置z s 和误差传感器位置z e 的函数。于是对于策略(II ),问题就转化为:寻找一个最优的次级声源位置z s ,opt ,II 和误差传感器位置z e ,opt ,II ,使得管道内有源噪声控制后总声功率W c ,II 最小,即:(z s ,opt ,II ,z e ,opt ,II )={(z s ,z e )|min W c ,II }, s .t . q s =q s ,opt ,II , z s ∈(L min ,L ],z e ∈(z p ,L ].(8) 当噪声源为多频率的周期信号或者宽带噪声时,管道内总的声功率输出为噪声源各频率激励信号的声功率输出之和。假设噪声源信号有m 个激励频率w i ,对应声源强度分别为q p ,i ,i =1,2,…,m ,于是对于策略(I )和策略(II ),问题就转化为: z s ,opt ,n ={z s |min ∑ m i =1 W c ,n ,z s ∈(L min ,L ]},q s = ∑m i =1 q s ,opt ,n . (9) 式(9)中n 取I 或II ,分别对应策略(I )和策略(II )。1.2 误差传感器位置优化 对于优化策略(I ),确定次级声源位置z s ,opt ,I 后,即次级声源位于z s =z s ,opt ,I 平面。将z =z e ,z s =z s ,opt ,I 代入式(1)中,即可得到此时误差传感器处测得的声压p e 。通常情况下有源噪声控制系统以误差麦克风处的声压平方进行算法调节, |p e |2 =p *e p e =q *s λq s +τq *s +v q s +χ.(10)其中λ恒为正数,因此必然存在一个最优的q s ,opt ,e , 使得 p e 2取最小值 p e 2 min 。误差传感器的位置优 化问题则转化为:寻找一个最优的误差传感器位置z e ,opt ,I ,当次级声源强度为q s ,op t ,e 时,在误差传感器处获得 p e 2 min 最小,即: z e ,opt ,I ={z e |min |p e |2 min ,z e ∈(z p ,L ]},s .t . q s =q s ,opt ,e ,z s =z s ,opt ,I . (11) 1.3 物理系统设计优化结果 依据实际的物理系统平台,进行次级声源和误差传感器的位置优化计算。物理系统主要参数为:D =30cm ,z p =10cm ,L =200cm ,ρ0=1.21kg /m 3 ,声速为c 0=338m /s ,次级声源位置1.0m ≤z s ≤2.0m ,管道内原始噪声源的声功率为W p ,0。 图2所示为使用优化策略(I )所得到的管道上游总的声功率W c ,I 和次级声源的强度q s ,opt ,I 关于次 图2 优化策略(I )的优化结果 级声源位置z s 的关系。 图3所示为使用优化策略(II )所得到的管道总 的声功率W c ,II 关于次级声源位置z s 和误差传感器位置z e 的关系。其中图3a 和3b 分别对应于噪声源信号频率为160Hz 和200H z 时不同次级声源位置、误差传感器位置时的W c ,II /W p ,0比值大小。图3所示颜色深浅代表比值的大小,颜色越浅,比值越小,即有源噪声控制后管道内声功率W c ,II 越小,此时对应的次级声源位置和误差传感器位置较好。 对比图2和图3的优化结果可以看出,优化结果基本上是完全相同的。对于160H z 噪声源信号,次级声源位于管道1.0~1.6m 处,管道内总声功率减少;次级声源位置大于1.7m 时,管道声功率略有增加。当噪声源信号频率为200H z 时,次级声源在管道1.5m 附近声功率增强较大。 对于策略(I ),确定次级声源位置后,由式(10)得到q s ,opt ,e =-τ/λ,此时 p e 2 min 恒为0。图4所示为次级声源位于1.1m 和1.4m 时,次级声源强度与噪声源强度比值随误差传感器位置的变化曲线。 从图4中可以发现,当误差传感器位于次级声源之后(管道下游)时,系统基本保持稳定,而且误差 刘会灯,等: 管道噪声有源控制系统的次级声源和误差传感器位置优化385 图3 优化策略(II)的优化结果 传感器的位置选择比较自由;当误差传感器位于次级声源之前(管道上游时),在某些位置,需要较强的次级声源强度输出,误差传感器的选择应尽量避开这些位置。例如图4a和图4b中误差传感器位于0.9m处,对于160H z的声源,则需要较强的声源驱动。 2 管道有源噪声控制实验平台 2.1 物理系统 实验所采用的物理系统如图5所示,聚氯乙烯(PVC)管道直径为30cm,长度为220cm,一端开口,一端封闭。SP1为噪声源喇叭,SP2—SP4为次级声源喇叭,由数字控制系统产生控制信号经过功率放大器驱动喇叭发声。E1—E5为麦克风,用来监测管道内声压的分布情况,E1同时作为参考麦克风,将噪声源声压信号转化为电压信号,E2—E5作为误差麦克风,检测管道内残留噪声信号,由自适应控制算法更新次级声源的驱动信号。SP1—SP4和E1—E5在管道中的安装位置如图5所示 。2.2 硬件系统 实验中的控制系统硬件设计以主频200M Hz 的浮点DSP芯片TMS320C6713为核心,硬件系统包括18路16位高精度AD采样和12路16位高精度DA输出,可以满足单通道和多通道有源噪声控制系统的实验要求,硬件系统整体框图如图6所示。 18路麦克风采集信号经过前置放大器和抗混叠滤波器,进入AD采样,将模拟信号转化为数字信号,由DSP自适应有源噪声控制算法,产生次级声源驱动信号,经过DA转化为模拟信号,并经过重构 386 清华大学学报(自然科学版)2011,51(3 ) 图6 管道电机噪声有源控制硬件系统框图 滤波器和功率放大器,驱动次级声源发声。前置放大器的放大倍数为0~54.81dB 范围内任意调节,抗混叠滤波器和重构滤波器均为4阶低通滤波器,截止频率为1kH z ,最大延迟为600μs ,功率放大器最大输出功率为20W 。 3 实验结果 为了验证物理系统优化设计的结果,使用滤波-x 最小均方算法(FxLMS )[13] 和滤波-u 递归LMS 算法(FuRLMS )进行物理系统优化设计实验,不同控制算法产生的次级声源驱动信号不同,系统降噪效果也不相同。根据优化后的系统平台,对单频率正弦噪声信号以及多频率正弦噪声信号进行管道有源噪声控制。3.1 次级声源和误差传感器位置优化实验 次级声源分别为SP2—SP4,E2—E5为误差传感器,噪声源信号为频率160Hz ,250H z 以及100Hz 基频的多频率周期正弦信号,使用FxLMS 和FuRLMS 算法,比较各种方案的系统控制性能。定义E1— E5处的声压级为L p ,i ,i =1,2,…,5,以管道中E2—E5处的总声压级作为系统的评价指标,则控制前后,管道总声压级可以计算为 L p ,tot =10lg ∑ 5 i =2 10L p ,i 10 . 为了描述方便,定义SP2和误差麦克风E2— E54种方案依次为I ,II ,III ,IV 方案,SP3和误差麦克风E2—E54种方案依次为V ,VI ,VII ,VIII ,以此类推。 表1和表2分别为使用FxLMS 算法和FuRLMS 算法时,不同噪声源不同控制方案时管道总声压降噪量。可以看出,噪声源频率为160Hz 时,次级声源在SP3降噪量大于次级声源位于SP2处,而噪声源频率为200H z 时,结论相反,这与理论分析是吻合的。 表1 FxLMS 算法下不同方案对应的管道内总降噪量 (dB ) 噪声源方案 I II III IV V VI VII V III IX X XI XII 160Hz 2.585.736.946.814.638.4810.668.494.316.09——200Hz 4.296.308.097.445.957.986.925.225.242.67——多频率 6.88 7.41 9.08 8.77 1.53 5.65 5.97 4.38 1.66 5.67 -1.47 5.83 表2 FuRLMS 算法下不同方案对应的管道内总降噪量 (dB ) 噪声源方案 I II III IV V VI VII V III IX X XI XII 160Hz 1.976.957.036.593.9011.571 2.5211.514.836.52 8.165.25200Hz -4.537.868.734.326.747.185.33-1.720.631.63——多频 7.08 8.91 9.94 7.38 1.57 5.32 5.87 4.41 0.65 6.20 -1.76 4.72 刘会灯,等: 管道噪声有源控制系统的次级声源和误差传感器位置优化387 图7所示分别为使用不同控制算法,最优方案VII 和方案III 时管道有源噪声控制前后管道声压分布情况。图7中的每个分图所示垂直方向3个图分别对应于原始噪声声压分布、Fx LMS 和FuRLMS 算法控制后管道声压分布。 从图7中可以看出对于频率为160Hz 的噪声源 信号,管道各处均有较大降噪,方案VII 优于方案III ;而当噪声源频率为200H z 时,方案III 在管道各处均有降噪,而方案VII 在管道端部声压变大,虽然管道内总的声功率略有增加,但是管道下游方案VII 降噪性能明显优于方案III 。综合表1、表2和图7的结果,可以看出系统最优的控制方案依次为VII ,III ,VI 。 图7 FxLMS 和FuRLMS 算法有源噪声控制前后管道声压分布 3.2 单频率正弦信号噪声控制实验 根据上文中不同方案的优化实验,选择方案VII 进行有源噪声控制实验,即噪声源为SP1,参考麦克风为E1,次级声源为SP3,误差麦克风为E4。基本硬件参数为:前置放大器倍数为35dB ;功率放大器音量可调电阻总阻值为40k Ψ,对于噪声源功率放大器,该音量可调电阻有效阻值为10.75k Ψ,对于次级声源功率放大器,该音量可调电阻有效阻值为0.8k Ψ。使用FxLMS 、FuRLMS 、反馈FxLMS (FBFx -LMS )以及混合前馈反馈Fx LMS 算法(H FxLMS ),调整信号发生器输出噪声源频率为160~550Hz ,控 制系统在误差麦克风E4处的降噪量如表3所示。 表3 不同算法有源噪声控制误差麦克风E4处降噪量噪声源f /Hz 噪声源强度/dB E4处降噪量/dB F xL M S F uRLM S FBF xL M S HF xL M S 160102.214.030.232.129.8200101.830.630.131.430.2250104.521.6 31.3 33.7 33.7 300102.632.334.735.036.235095.110.023.98.919.9400103.030.230.131.734.045089.615.818.23.413.850096.121.926.120.925.3550 98.4 20.4 25.2 23.7 25.9 388 清华大学学报(自然科学版)2011,51(3) 3.3 多频率正弦周期信号噪声控制实验 物理系统和前文相同,噪声源功率放大器音量 调节电阻有效阻值为26.74kΨ,噪声源信号为基波 100Hz,包含1—5次谐波的多频率正弦周期信号。 实验分别使用(I)FxLMS、(II)FuRLMS、(III) H Fx LMS、(IV)FBFx LM S以及(V)自适应陷波 滤波器算法(ANF)[14]、(VI)窄带Fx LM S算法 (NANC-Fx LM S)[15],对噪声源进行有源噪声控 制。离线通道模型使用LM S算法,离线观测滤波 器模型长度为128,迭代步长为0.005。在线迭代 算法使用泄露LMS算法,泄露参数取0.00001, Fx LMS和FBFx LMS算法的自适应滤波器长度为 128,迭代步长为0.001,FuRLMS和HFx LM S算 法前馈和反馈自适应滤波器长度各为64,迭代步长 分别为0.001和0.0005。ANF算法迭代步长为 0.01,NANC-Fx LM S算法自适应滤波器长度为 20,迭代步长为0.01。表4所示为不同算法误差麦 克风E4处测量噪声各频率分量降噪量以及总的降 噪量。从表4中可以看到6种控制算法对于多频率 正弦周期信号均有较大降噪量,算法I—V在100 H z处降噪量较小,而算法VI在100H z处降噪量非 常明显。 表4 不同算法有源噪声控制在误差麦克风E4处降噪量 噪声源f/H z 原始噪声 强度/dB E4处降噪量/dB (I)(II)(III)(IV)(V)(V I) 10072.90.50.10.20.31.49.2 20084.232.736.847.442.919.738.6 300100.956.465.559.465.518.839.2 40085.16.835.828.634.82.916.8 50075.75.55.23.52.80.58.2 总计101.321.226.425.725.516.225.4 图8所示为有源噪声控制前后,误差麦克风E4处的声压频谱曲线。图8a—8d分别对应于使用(II)FuRLM S算法、(III)HFx LM S算法、(IV) FBFx LMS算法和(VI)NANC-Fx LM S算法后,误差麦克风E4处所测得的声压频谱图(dB)。图8中实线所示为E4处测得原始噪声的声压频谱,虚线为不同算法有源噪声控制后E4处残留噪声的声压频谱。从图8中可以看出,4种算法对于原始噪声各峰值频率均有较大降噪量,对于噪声峰值300H z 频率处降噪量最大达到65.5dB。 图9所示为不同算法有源噪声控制前后管道内声压的分布情况。图9 所示垂直方向依次为原始噪 图8 误差麦克风E4处控制前后声压频谱曲线 声,算法I—VI控制后噪声。从图9中可以看出,管道各处声压均有降低,(V)算法性能略差,而且管道下游降噪量明显高于管道上游。 刘会灯,等: 管道噪声有源控制系统的次级声源和误差传感器位置优化389 图9 不同算法有源噪声控制前后管道内声压分布 4 结 论 本文根据电机运行噪声的特点,进行了管道的有源噪声控制系统理论研究,提出了两种次级声源位置和误差传感器位置的优化策略:1)基于管道下游声压为0时管道内声功率最小,2)基于误差传感器处声压为0时管道内声功率最小。推导了优化计算方法并给出了物理系统的优化结果,通过实验验证了优化结果的可行性。在优化后的管道实验平台中,对于噪声源为160~550Hz单频率正弦周期信号和基波100H z,1—5次谐波的多频率正弦周期信号,使用不同的控制算法,进行了有源噪声控制实验,取得了很好的降噪效果,为电机噪声的有源控制提供了理论依据。 参考文献 (References) [1]Lu eg P.Process of Silencing S ound Os cillations[P]. https://www.doczj.com/doc/1b846429.html, A,1936. [2]Ku o S M,M organ D R.Active noise control:A tu torial review[J].Proceedings o f the I EEE,1999,87(6): 943-973. [3]S lock D T,Kailath M T.Nu merically stable fast tran sversal filters for recu rsive least squares adaptive filtering[J].IE EE Transactions on S igna l Pr ocessing,1991,39(1):92-114. [4]A lbu F,Bouch ard M,Zakharov Y.Ps eudo-affine p rojection algorithm s fo r multichannel active noise control[J].IE EE T ransactions on Aud io,S peech and Lang uage Processing, 2007,15(3):1044-1052.[5]Cornelis D P,Rufu s F,Ben S C,et al.A Kalm an filter approach to virtual sensing for active noise con trol[J]. Mechanical S y stems an d Sig nal Processing,2008, 22(2):490-508. [6]宫赤坤,张从敏.基于卡尔曼滤波的有源噪声自适应逆控制 [J].噪声与振动控制,2008,28(3):96-99. GONG Chiku n,ZH ANG Congmin.Active noise adaptive inverse control based on kalman filter[J].Nois e an d Vibration Control,2008,28(3):96-99.(in Chinese) [7]H uynh V T,Du on g H N.A fuzzy neu ral netw ork feedb ack active noise con troller[C]//10th International C onferen ce on Control,Automation,Robotics and Vision.Hanoi,Vietnam, 2008:1109-1114. [8]张晓宇,仪垂杰.基于神经网络的有源噪声控制实验研究 [J].噪声与振动控制,2009,29(2):66-68. ZHANG Xiaoyu,YI Chuijie.Experimental stu dy of active noise control sys tem b ased on artificial neu ral netw ork[J]. Noise and Vibr ation C ontrol,2009,29(2):66-68. (in Chinese) [9]Ru sso F,Sicuranza G L.Accuracy and performance evaluation in the genetic op timiz ation of n on linear system s for active nois e control[J].IE EE Transactions on Instrumentation and Measurement,2007,56(4):1443-1450. [10]郑陶冶,高翔.一种基于混合遗传算法的有源噪声控制方法 [J].东南大学学报:自然科学版,2004,34(2):171-174. ZHENG Taoye,GAO Xiang.Active nois e con trol based on hyb rid genetic algorithms[J].Journa l o f S outheast Univ: Sci an d Tech,2004,34(2):171-174.(in Chinese) [11]CH ANG Chengyuan,S HYU Kuokai.A self-tuning fuz zy filtered-U algorithm for th e application of active noise cancellation[J].IE EE Transaction on Circuits and S y stems I:Fun damental Theory and A p p lication s,2002,49(9): 1325-1333. [12]Nelson P A,Ell iott S J.Active Control of Sound[M]. London,UK:Academic Press,1992. [13]Chang C hengyuan,S hyu Kuokai.A self-tunin g fuz zy filtered-U algorithm for th e application of active noise cancellation[J].IE EE Transaction on Circuits and S y stems I:Fund amenta l Theor y and A pp lica tions,2002, 49(9):1325-1333. [14]Sun X,Ku o S M.Active narrow ban d noise control system s using cascading adaptive filters[J].IEE E Transactions on Aud io,Sp eech an d Lang uage Proces sing,2007,15(2): 586-592. [15]XIAO Yegui,Ik uta A,M A Liying,et al.Stochastic analysis of the FXLM S-based narrow band active noise control system [J].IEEE Tr ansactions on A ud io,S peech and Lan gua ge Processing,2008,16(5):1000-1014. 对杠杆表和正弦规的使用和测量方法的几点浅见 摘要:杠杆表和正弦规是钳工实习中对工件进行测量时常用的量具,对其正确的使用和选择正确的测量方法,对保证工件质量起着至关重要的作用.用杠杆表结合正弦规对工件进行测量的方法与钳工其它常规量具来比,具有精度高,方便,快捷,误差位置反映准确等优点,尤其在复杂工件的测量中更具有不可替代的作用. 关键词; 正弦规杠杆表量块测量角度 作为一名钳工实习教师多年来的主要工作就是指导学生进行钳工实习课题的加工,而测量方法是保证工件质量的重要环节.杠杆表和正弦规在对复杂工件的测量和保证工件的加工质量方面比其它常规量具有较大的优势.杠杆表可以对一般工件的几何形状进行测量,还可以对一些小孔,槽,孔距等百分表难以测量的尺寸进行测量.杠杆表可细分为杠杆百分表和杠杆千分表.在钳工实习工件的加工中,可以根据测量精度的不同进行相应的选择.正弦规是根据直角三角形中正弦函数原理进行角度间接测量的一种量具.一般来说,正弦规只适合测量精度较高的小角度工件.因为这种间接测量角度方法的误差传递系数随着被测量角度的增大而增大,角度45度以上测量误差急剧增大,一般角度在30度以下使用正弦规较为适合.另外标准正弦规有100mm(两圆柱中心距离)和200mm两种规格.在此就杠杆表,正弦规的使用方法和在角度测量,对称度的控制以及复杂工件的尺寸检验方面谈几点浅见. 一,杠杆表的正确使用 1,测量时,应尽可能使测量杆轴线与工件被测量表面保持平行(如图一所示) 图一杠杆百分表的正确使用 2,测量时如无法使测量杆轴线图一杠杆表的正确使用 2,测量时如无法使测量杆与工件被测量表面保持平行时,测量的读数应乘以修正系数.(图二所示) 图二杠杆百分表读数的修正 即: H=Hcosα 式中: H—被测量表面实际变动量(mm) H—测量读数(mm) α—测量杠轴线与工件表面的夹角 二,正弦规的正确使用 在平板工作面与正弦规圆柱之间安放一组尺寸为H的量块,使正弦规工作面相对平板工作面倾斜一个角度α.α为被测角度的标称值,所用量块尺寸为H=Lsinα.L为已知,即两圆柱的中心距离( 如图三所示). 如被测工件表面角度与正弦规所垫起的角度相等,杠杆表在工件两端的读数相等.如杠杆表 测量工件两端的高低差为Δa,则被测量角度差Δα=〃. 例:两点的高度误差为:Δa=0.008mm ,L=70mm,则Δα= =23.6〃 如测量表面反映示值是被测件左方读数大于右方读数;则被测零件的实际角度α=30°00′23.6〃.如左方读数小于右方读数,则α=29°59′36.4〃.为了消除安装误差,在一次测量之后可将正弦规旋转180°再测一次,取两次测量的平均值为最后测量结果. 在量块的研合时,要有一定的要求和技巧,正确的方法是将两量块成30° 角交叉贴合在一起,用手前后微量地错动上面的一块,同时旋转,使两工作面转到相互平行的方向.然后沿工作面长边方向平行向前推进量块,直到两工作面全部贴合在一起. 在正常情况下,在研合过程中,手指能感到研合力,两量块不必用力就能贴附在一起.如研合力不大,可在旋转和推进研合时加一些压力.但压力不要太大,以免小尺寸量块变形.另外尺寸小于5mm的量块与大尺寸量块组合时,应将小尺寸量块放在下面,将大尺寸量块往小尺寸量块 传感器电路的噪声及其抗干扰技术研究 作者:刘竹琴,白泽生延安大学物理与电子信息学院 尽量消除或抑制电子电路的干扰是电路设计和应用始终需要解决的问题。传感器电路通常用来测量微弱的信号,具有很高的灵敏度,如果不能解决好各类干扰的影响,将给电路及其测量带来较大误差,甚至会因干扰信号淹没正常测量信号而使电路不能正常工作。在此,研究了传感器电路设计时的内部噪声和外部干扰,并得出采取合理有效的抗干扰措施,能确保电路正常工作,提高电路的可靠性、稳定性和准确性。 传感器电路通常用来测量微弱的信号,具有很高的灵敏度,但也很容易接收到外界或内部一些无规则的噪声或干扰信号,如果这些噪声和干扰的大小可以与有用信号相比较,那么在传感器电路的输出端有用信号将有可能被淹没,或由于有用信号分量和噪声干扰分量难以分辨,则必将妨碍对有用信号的测量。所以在传感器电路的设计中,往往抗干扰设计是传感器电路设计是否成功的关键。 1 传感器电路的内部噪声 1.1 高频热噪声 高频热噪声是由于导电体内部电子的无规则运动产生的。温度越高,电子运动就越激烈。导体内部电子的无规则运动会在其内部形成很多微小的电流波动,因其是无序运动,故它的平均总电流为零,但当它作为一个元件(或作为电路的一部分)被接入放大电路后,其内部的电流就会被放大成为噪声源,特别是对工作在高频频段内的电路高频热噪声影响尤甚。 通常在工频内,电路的热噪声与通频带成正比,通频带越宽,电路热噪声的影响就越大。在 通频带△f内,电路热噪声电压的有效值:。以一个1 kΩ的电阻为例,如果电路的通频带为1 MHz,则呈现在电阻两端的开路电压噪声有效值为4μV(设温度为室温T=290 K)。看起来噪声的电动势并不大,但假设将其接入一个增益为106倍的放大电路时,其输出噪声可达4 V,这时对电路的干扰就很大了。 1.2 低频噪声 低频噪声主要是由于内部的导电微粒不连续造成的。特别是碳膜电阻,其碳质材料内部存在许多微小颗粒,颗粒之间是不连续的,在电流流过时,会使电阻的导电率发生变化引起电流的变化,产生类似接触不良的闪爆电弧。另外,晶体管也可能产生相似的爆裂噪声和闪烁噪声,其产生机理与电阻中微粒的不连续性相近,也与晶体管的掺杂程度有关。 1.3 半导体器件产生的散粒噪声 由于半导体PN结两端势垒区电压的变化引起累积在此区域的电荷数量改变,从而显现出电容效应。当外加正向电压升高时,N区的电子和P区的空穴向耗尽区运动,相当于对电容充电。当正向电压减小时,它又使电子和空穴远离耗尽区,相当于电容放电。当外加反向电 实验8 普通螺纹中径尺寸测量和螺纹几何参数的综合检测 一、用螺纹千分尺测量螺纹中径 螺纹千分尺如图8-1所示。螺纹千分尺 主要用于测量螺纹的中径尺寸,其结构与外 径千分尺基本相同,只是砧座与测量头的形 状有所不同。其附有各种不同规格的测量 头,每一对测量头用于一定的螺距范围,测 量时可根据不同的螺距选取不同规格的测 量头。测量时,V形测量头与螺纹牙型的凸 起部分相吻合,锥形测量头与螺纹牙型沟槽图8-1 螺纹千分尺 部分相吻合,从固定套管和微分筒上可读出螺纹的中径尺寸。 二、用“三针法”测量外螺纹单一中径 在生产中,该测量具有方法简单、测量精度高的优点,应用广泛(测量原理见图8-2)。 根据被测螺纹的螺距选取合适直径的三根精密量针,按图示位置放在被测螺纹牙槽内, 再夹放在千分尺的两测头之间。外螺纹单一中径:d s 2=M-3d +0.866P(见教材P199)。 三、用螺纹塞规、环规综合检验内、外螺纹的合格性 图8-3所示为用环规检验外螺纹的图例,用卡规先检验外螺纹顶径的合格性,再用螺纹环规的通规检验,如能与被检测螺纹顺利旋合,则表明该外螺纹的作用中径合格。若被检测螺纹的单一中径合格,则螺纹环规的止规不能通过被检外螺纹(最多允许旋进2~3牙)。 用螺纹塞规检验内螺纹的的原理同上。 图8-2 用“三针法”测量外螺纹单一中径图 8-3用螺纹环规和光滑极限量规检验外螺纹实验9 圆锥锥角偏差测量和圆锥几何参数的综合检测 一、正弦规的工作原理和使用方法 正弦规结构简单,主要由主体工作平板和两个直径相同的精密圆柱组成,如图9-1所示。为了便于被测工件在工作平板的工作面上定位和定向,装有侧挡板和后挡板。 正弦规上两个精密圆柱的中心距尺寸精度很高,中心距有100、200mm等规格,如:中心距为100mm的极限偏差为土0.003或±0.002mm,同时,工作平板工作面的平面度精度以及两个精密圆柱的形状精度和它们之间的相互精度都很高,可以用作精密测量。 1.属于传感器动态特性指标的是(D ) A 重复性 B 线性度 C 灵敏度 D 固有频率 2 误差分类,下列不属于的是(B ) A 系统误差 B 绝对误差 C 随机误差 D粗大误差 3、非线性度是表示校准(B )的程度。 A、接近真值 B、偏离拟合直线 C、正反行程不重合 D、重复性 4、传感器的组成成分中,直接感受被侧物理量的是(B ) A、转换元件 B、敏感元件 C、转换电路 D、放大电路 5、传感器的灵敏度高,表示该传感器(C) A 工作频率宽 B 线性围宽 C 单位输入量引起的输出量大 D 允许输入量大 6 下列不属于按传感器的工作原理进行分类的传感器是(B) A 应变式传感器 B 化学型传感器 C 压电式传感器 D热电式传感器 7 传感器主要完成两个方面的功能:检测和(D) A 测量 B感知 C 信号调节 D 转换 8 回程误差表明的是在(C)期间输出输入特性曲线不重合的程度 A 多次测量 B 同次测量 C 正反行程 D 不同测量 9、仪表的精度等级是用仪表的(C)来表示的。 A 相对误差 B 绝对误差 C 引用误差 D粗大误差 二、判断 1.在同一测量条件下,多次测量被测量时,绝对值和符号保持不变,或在改变条件时,按一定规律变化的误差称为系统误差。(√) 2 系统误差可消除,那么随机误差也可消除。(×) 3 对于具体的测量,精密度高的准确度不一定高,准确度高的精密度不一定高,所以精确度高的准确度不一定高(×) 4 平均值就是真值。(×) 5 在n次等精度测量中,算术平均值的标准差为单次测量的1/n。(×) 6.线性度就是非线性误差.(×) 7.传感器由被测量,敏感元件,转换元件,信号调理转换电路,输出电源组成.(√) 8.传感器的被测量一定就是非电量(×) 9.测量不确定度是随机误差与系统误差的综合。(√) 10传感器(或测试仪表)在第一次使用前和长时间使用后需要进行标定工作,是为了确定传感器静态特性指标和动态特性参数(√) 二、简答题:(50分) 1、什么是传感器动态特性和静态特性,简述在什么频域条件下只研究静态特性就能够满足通常的需要,而在什么频域条件下一般要研究传感器的动态特性? 答:传感器的动态特性是指当输入量随时间变化时传感器的输入—输出特性。静态特性是指当输入量为常量或变化极慢时传感器输入—输出特性。在时域条件下只研究静态特性就能够满足通常的需要,而在频域条件下一般要研究传感器的动态特性。 2、绘图并说明在使用传感器进行测量时,相对真值、测量值、测量误差、传感器输入、输出特性的概念以及它们之间的关系。 答:框图如下: 测量值是通过直接或间接通过仪表测量出来的数值。 测量误差是指测量结果的测量值与被测量的真实值之间的差值。 传感器的噪声及其抑制方法 1 引言 传感器作为自控系统的前沿哨兵,犹如电子眼一般将被测信息接收并转换为有效的电信号,但同时,一些无用信号也搀杂在其中。这些无用信号我们统称为噪声。 应该说,噪声存在于任何电路之中,但它对传感器电路的影响却尤为突出。这是因为,传感器的输出阻抗一般都很高,使其输出信号衰减厉害,同时,传感器自容易被噪声信号淹没。因此,噪声的存在必定影响传感器的精度和分辨率,而传感器又是检测自控系统的首要环节,于是势必影响整个自控系统的性能。 由此,噪声的研究是传感器电路设计中必须考虑的重要环节,只有有效地抑制、减少噪声的影响才能有效利用传感器,才能提高系统的分辨率和精度。 但噪声的种类多,成因复杂,对传感器的干扰能力也有很大差异,于是抑制噪声的方法也不同。下面就传感器的噪声问题进行较全面的研究。 2 传感器的噪声分析及对策 传感器噪声的产生根源按噪声源分为内部噪声和外部噪声。 2.1 内部噪声——来自传感器件和电路元件的噪声 2.1.1 热噪声 热噪声的发生机理是,电阻中自由电子做不规则的热运动时产生电位差的起伏,它由温度引发且与之呈正比,由下面的奈奎斯特公式表示: 其中,Vn:噪声电压有效值;K:波耳兹曼常数(1.38×10-23J〃K-1);T:绝对温度(K);B:系统的频带宽度(Hz);R:噪声源阻值(Ω)。 噪声源包括传感器自身内阻,电路电阻元件等。 由公式(1)可见,热噪声由于来自器件自身,从而无法根本消除,宜尽可能选择阻值较小的 电阻。 同时,热噪声与频率大小无关,但与频带宽成正比,即,对应不同的频率有均匀功率分布,故,也称白噪声。因此,选择窄频带的放大器和相敏检出器可有效降低噪声。 2.1.2 放大器的噪声 2.1.3 散粒噪声 散粒噪声的噪声源为晶体管,其机理是由到达电极的带电粒子的波动引起电流的波动形成的。噪声电流In与到达电极的电流Ic及频带宽度B成正比,可表示为: 由此可见,使用双极型晶体管的前置放大器来放大传感器的输出信号的场合,选Ic取值尽可能小。同时,也可选择窄频带的放大器降低散粒噪声电流。 2.1.4 1/f噪声 1/f噪声和热噪声是传感器内部的主要噪声源,但其产生机理目前还有争议,一般认为它是一种体噪声,而不是表面效应,源于晶格散射引起。在晶体管的P-N附近是电子-空穴再复合的不规则性产生的噪声,该噪声的功率分布与频率成反比,并由此而得名。其噪声电压表示为: Hooge还在1969年提出了一个解释1/f噪声的经验公式: 式中,SRH和SVH为相应于电阻起伏和电压起伏的功率噪声密度,V为加在R上的偏压,N 为总的自由载流子数,α叫Hooge因子,是一个与器件尺寸无关的常数,它是一个判断材料性能的重要参数。 对于矩形电阻,总的自由载流子数N=PLWH,其中,P为载流子浓度,L、W、H为电阻的长、宽、厚。 线性压力传感器(静态)基本误差不确定度评定 吉林省计量科学研究院:张攀峰 李德辉 韩晓飞 孙俊峰 1、评定依据:JJG 860-1994 《压力传感器(静态)》 JJF 1059-1990 《测量不确定度评定与表示》 JJF 1094-2002 《测量仪器特性评定》 2、测量方法: 检定/校准、检测装置由标准器(在此为0.02级活塞式压力计)、压力源、三通接头用导压管连接起来而组成,导压管另一端与压力传感器(以下简称传感器)连接起来,连接处不得泄漏,外加对传感器供电电源,并由数字电压表读取传感器输出。通过采用多次循环测量确定被测传感器工作直线方程的方法进行检定/校准、检测。 3、数学模型 依据JJG 860 — 1994 压力传感器(静态)检定规程可知,线性压力传感器的基本误差公式为: A =±(ξS +ξLH )------(1) 式中:A ——传感器各检定/校准、检测点的基本误差(以绝对误差表示) ξLH ——传感器各检定/校准、检测点系统标准不确定度分量 3 方差和灵敏度系数 ()()() () 22 222212------+=LH S u C u C A u ξξ 式中:灵敏度系数C 1=C 2=1 则: 4 标准不确定度一览表 5 标准不确定度分量的计算 5.1 由被检定/校准、检测传感器重复性引起的标准不确定度u (ξS ): 用0.02级活塞压力计检定/校准、检测由北京中航机电技术公司生产CYB —IOS 型,编号为2H2883,测量范围为0—80MPa,0.25级传感器的0MPa 、10MPa 、20MPa 、30MPa 、40MPa 、50MPa 、60MPa 、70MPa 、80MPa 点,分别读取被检定/校准、检测传感器各点四个循环读数如下表所示: 传感器在整个测量范围内的标准偏差为s : ()()() () 3222------+=LH S u u A u ξξ) 4(21 2 1 2------+= ∑∑==m S S s m i Di m i Ii 第五章 测量误差及其处理的基本知识 1、测量误差的来源有哪些?什么是等精度测量? 答:测量误差的来源有三个方面:测量仪器的精度,观测者技术水平,外界条件的影响。该三个方面条件相同的观测称为等精度观测。 2、什么是系统误差?什么是偶然误差?它们的影响是否可以消除? 答:系统误差是指在相同的观测条件下对某量作一系列的观测,其数值和符号均相同,或按一定规律变化的误差。偶然误差是指在相同的观测条件下对某量作一系列的观测,其数值和符号均不固定,或看上去没有一定规律的误差。系统误差的影响采取恰当的方法可以消除;偶然误差是必然发生的,不能消除,只能削弱偶然误差的影响。 3、举出水准测量、角度测量及距离测量中哪些属于系统误差? 答:水准仪的i 角误差,距离测量时钢尺的尺长误差,经纬仪的视准轴误差、横轴误差和竖盘指标差等都属于系统误差。 4、评定测量精度的指标是什么?何种情况下用相对误差评定测量精度? 答:测量中最常用的评定精度的指标是中误差,其绝对值越大精度越低。当误差大小与被量测量的大小之间存在比例关系时,采用相对误差作为衡量观测值精度的标准。例如距离丈量,采用往返丈量的相对误差作为评定精度的指标。 所谓相对中误差(简称相对误差)就是中误差之绝对值(设为|m|)与观测值(设为D )之比,并将分子化为1表示K =| |/1||m D D m = 。 5、观测值中误差如何计算? 答:设在相同条件下对某量进行了n 次观测,得一组观测值L 1、L 2、……Ln ,x 为观测值的算术平均值, i v 表示观测值改正数,即 11L x v -= 22L x v -= ...... n n L x v -= 则中误差 [] 1-±=n vv m 6、算术平均值及其中误差如何计算? 传感器的灵敏度,低频噪声特性和动态响应范围 工程振动量值的物理参数常用位移、速度和加速度来表示。由于在通常的频率范围内振动位移幅值量很小,且位移、速度和加速度之间都可互相转换,所以在实际使用中振动量的大小一般用加速度的值来度量。常用单位为:米/秒2(m/s2),或重力加速度(g)。 描述振动信号的另一重要参数是信号的频率。绝大多数的工程振动信号均可分解成一系列特定频率和幅值的正弦信号,因此,对某一振动信号的测量,实际上是对组成该振动信号的正弦频率分量的测量。对传感器主要性能指标的考核也是根据传感器在其规定的频率范围内测量幅值精度的高低来评定。 电荷输出型加速度计不适合用于低频测量 由于低频振动的加速度信号都很微小,而高阻抗的小电荷信号非常容易受干扰;当测量对象的体积越大,其测量频率越低,则信号的信噪比的问题更为突出。因此在目前带内置电路加速度传感器日趋普遍的情况下应尽量选用电噪声比较小,低频特性优良的低阻抗电压输出型压电加速度传感器。 传感器的低频截止频率 与传感器的高频截止频率类同,低频截止频率是指在所规定的传感器频率响应幅值误差(±5%,±10%或±3dB)内传感器所能测量的最低频率信号。误差值越大其低频截止频率也相对越低。所以不同传感器的低频截止频率指标必须在相同的误差条件下进行比较。低阻抗电压输出型传感器的低频特性是由传感器敏感芯体和内置电路的综合电参数所决定的。其频率响应特性可以用模拟电路的一阶高通滤波器特性来描述,所以传感器的低频响应和截止频率完全可以用一阶系统的时间常数来确定。从实用角度来看,由于传感器的甚低频频率响应的标定比较困难,而通过传感器对时间域内阶跃信号的响应可测得传感器的时间常数;因此利用传感器的低频响应与一阶高通滤波器的特性几乎一致的特点,通过计算可方便地获得传感器的低频响应和与其对应的低频截至频率。 传感器的灵敏度,低频噪声特性和动态响应范围 理论课教案首页 教学 教学内容教师活动学生活动时间环节 一、正弦规的结构 导入 新课 进入 新课 1.原理 正弦规是利用三角法测量角度的一种精密量具。一 般用来测量带有锥度或角度的零件。因其测量结果,是 通过直三角形的正弦关系来计算的,所以称为正弦规。 2.组成 它主要由一准确钢制长方体—主体和固定在其两端 的两个相同直径的钢圆柱体组成。其两个圆柱体的中心 距要求很准确,两圆柱的轴心线距离L一般为100毫米 或200毫米两种,也有500毫米的。工作时,两圆柱轴线 与主体严格平衡,且与主体相切。 3.使用方法 图为利用正弦规测量圆锥量规的情况。在直角三角 形中,sinα=H/L,式中H为量块组尺寸,按被测角度的 公称角度算得。根据测微仪在两端的示值之差可求得被 测角度的误差。正弦规一般用于测量小于45°的角度,在 测量小于30°的角度时,精确度可达3″~5″。 信息反馈: 教学 环节 教学内容教师活动学生活动时间 新课4.技术要求 a、正弦规工作面不得有严重影响外观和使用性能的 裂痕、划痕、夹渣等缺陷。 b、正弦规主体工作面的硬度不得小于664HV,圆 柱工作面的硬度不得小于712HV,挡板工作面的硬度不 得小于478HV。 c、正弦规主体工作面的粗糙度Ra的最大允许值为 0.08μm,圆柱工作面的表面粗糙度Ra的最大允许值为 0.04μm,挡板工作面的表面粗糙度Ra的最大允许值为 1.25μm。 d、正弦规各零件均应去磁,主体和圆柱必须进行稳 定性处理。 e、正弦规应能装置成0°~80°范围内的任意角度, 其结构刚性和各零件强度应能适应磨削工作条件,各零 件应易于拆卸和修理。 f、正弦规的圆柱应采用螺钉可靠地固定在主体上, 且不得引起圆柱和主体变形;紧固后的螺钉不得露出圆 柱表面。主体上固定圆柱的螺孔不得露出工作面。 二、正弦规的用途 正弦规是用于准确检验零件及量规角度和锥度的量 具。它是利用三角函数的正弦关系来度量的,故称正弦 规或正弦尺、正弦台。既是测量用的工具,又可做为夹具, 在多品种小批量生产及新产品试制中应用极为广泛。 可以测量角度和锥度。 理解 读图1-2-4 记笔记 10` 信息反馈: 第三节 误差的估算 由于物理量的数值的获得途径有直接测量和间接测量两种,无论直测量,还是间测量都有误差,误差的计算也分两种情况。广义地讲,两种情况的处理都属于误差计算。然而,间测量是由直测量决定的,以直测量为基础的,间测量的误差是由直测量通过给定的函数关系确定的。因此,狭义地讲,常把直测量的误差计算称为误差计算,而将间测量的误差计算叫误差传递。此外,由于严格意义上的误差是无法计算的,因而只能通过各种方法进行近似计算,故将误差计算称为误差的估算,而且可有多种方法进行估算。下面就介绍几种常用的误差估算方法。 一、直测量的误差估算 1.算术平均误差 在测量列{}i X 中,各次测量的误差的绝对值的算术平均值叫算术平均误差。记为X ?。 按定义 ∑=-=?n i i X X n X 101 或 ∑=?=?n i i X n X 1 1 其中0X X X i i -=?。 当n 较大时,可用下式估算为 () 1--= ?∑n n X X X i 此法比前法得到的偏差要大些。 2.绝对误差 误差的绝对值叫绝对误差。狭义的绝对误差,如上面的i X ?,X ?。而广义的绝对误差还有后面要讨论的x S ,x σ,σ,Q 等。 3.相对误差 绝对误差与平均值的百分比叫相对误差,又叫百分误差。记为r E 。其估算方法为 %100??= X X E r 广义地讲,后面要讨论的 X S x 、 X σ 等都可叫相对误差。 4.标准误差(实验标准差) 按定义,标准误差是测量列中各次误差的方均根,记为x σ。即 ()∑=-=n i i x X X n 1 201σ 需要注意的是,上式是在测量次数很多时,测量列按正态分布时所得到的结果。 实际上,由于真值无法获得,而测量次数也只能是有限的。因此,标准误差x σ只能通过偏差进行估算。常用的估算方法有:最大偏差法、极差法、Bessel 法等,它们的估算结果基本一致。应用上,一般使用Bessel 方法。 由统计理论可推导出,对有限次测量的Bessel 标准偏差x S 的计算公式(Bessel 公式)为: () ∑=--=n i i x X X n S 1 2 11 或 ?? ??????????? ??--=∑∑==2 112 111n i i n i i x X n X n S 即最后是用x S 代替x σ。通常所说的标准误差,实际上就是x S 。 5.算术平均值的标准差 算术平均值的标准差与实验标准差的关系为 x x S n S ?= 1 类似的关系还有算术平均值的平均差与算术平均差的关系 X n X ??= ?1 而且x S X 80.0≈?。 二、间测量的误差计算(误差的传递) 上面所讨论的误差计算方法是对直测量而言的,在此基础上我们可以进一步讨论间测量的误差计算问题。我们知道,间测量是由直测量通过一定的函数关系决定相应的间测量的误差,它们之间的这种关系叫误差的传递,相应的计算公式叫误差传递公式。下面我们首先讨论误差传递公式的一般形式,然后再将其运用于一些具体情况。 1.误差传递公式的一般形式 设间接测量量f 与彼此独立的直接测量量x 、y 、z (只取3个)间的函数关系为 ()z y x f f ,,= 测量结果用平均值和绝对误差表示为 x x x ?±= 一、概述 1、CRY2110/2112噪声传感器系列产品是一款工业级远程声级计,针对工业现场或噪声 源噪音监控、检测而设计的,它体积小,重量轻,安装灵活。其声频测量范围覆盖了人耳所能听到的全部频率,监测的声压范围满足国家噪声管理标准中的全部要求。2、设备内置高灵敏度传感器、前置放大器、计权网络、声校准装置及数据信号调理进行 现场声信号采集及处理,可将测得的声压级以RS-485及4-20mA模拟量标准输出,传输距离大于1km。 3、传感器可作为一个全天候噪音监测单元,兼容用户噪音监测、控制而组成的精细 噪声测量系统,方便与PC、PLC及各种数传模块连接。是各类噪声源噪声定量分析、声源定位、噪声治理及声学研究的理想选择。 二、技术参数 1、CRY2110符合GB/T3785-2型,CRY2112符合IEC61672-1级标准 2、测量范围:25~130dBA(可扩展至20-140dBA) 3、动态范围:≧110 dBA,无需量程切换 4、频率范围:10Hz~20kHz 5、频率计权:A(默认)、C、Z 6、时间计权:F(默认)、S 7、测量指标:瞬时噪声Lp、平均噪声Leq、(积分时间T可定制,仅RS-485输出) 8、声压级输出: RS-485,4-20mA ,1-5V或2-10V(可选) 9、供电:直流5V-24,220V (需配220V-5V电源适配器支持) 10、AD采样频率:48 kHz 11、检波方式;全数字 12、尺寸大小:φ24.5×115 mm;重量:115g 13、温度范围:-20~+50 ℃;相对湿度:≤80% 14、外形材质:不锈钢外壳,坚固防腐。 三、接口及定义 下图为噪声传感器尾部航空插头定义。 1、安装不当引入的误差 如热电偶安装的位置及插入深度不能反映炉膛的真实温度等,换句话说,热电偶不应装在太靠近门和加热的地方,插入的深度至少应为保护管直径的8~10倍;热电偶的保护套管与壁间的间隔未填绝热物质致使炉内热溢出或冷空气侵入,因此热电偶保护管和炉壁孔之间的空隙应用耐火泥或石棉绳等绝热物质堵塞以免冷热空气对流而影响测温的准确性。 热电偶冷端太靠近炉体使温度超过100℃;热电偶的安装应尽可能避开强磁场和强电场,所以不应把热电偶和动力电缆线装在同一根导管内以免引入干扰造成误差;热电偶不能安装在被测介质很少流动的区域内,当用热电偶测量管内气体温度时,必须使热电偶逆着流速方向安装,而且充分与气体接触。 2、绝缘变差而引入的误差 如热电偶绝缘了,保护管和拉线板污垢或盐渣过多致使热电偶极间与炉壁间绝缘不良,在高温下更为严重,这不仅会引起热电势的损耗而且还会引入干扰,由此引起的误差有时可达上百度。 3、热惰性引入的误差 由于热电偶的热惰性使仪表的指示值落后于被测温度的变化,在进行快速测量时这种影响尤为突出。所以应尽可能采用热电极较细、保护管直径较小的热电偶。测温环境许可时,甚至可将保护管取去。由于存在测量滞后,用热电偶检测出的温度波动的振幅较炉温波动的振幅小。测量滞后越大,热电偶波动的振幅就越小,与实际炉温的差别也就越大。 当用时间常数大的热电偶测温或控温时,仪表显示的温度虽然波动很小,但实际炉温的波动可能很大。为了准确的测量温度,应当选择时间常数小的热电偶。时间常数与传热系数成反比,与热电偶热端的直径、材料的密度及比热成正比,如要减小时间常数,除增加传热系数以外,最有效的办法是尽量减小热端的尺寸。使用中,通常采用导热性能好的材料,管壁薄、内径小的保护套管。在较精密的温度测量中,使用无保护套管的裸丝热电偶,但热电偶容易损坏,应及时校正及更换。 4、热阻误差 高温时,如保护管上有一层煤灰,尘埃附在上面,则热阻增加,阻碍热的传导,这时温度示值比被测温度的真值低。因此,应保持热电偶保护管外部的清洁,以减小误差。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断 电工电子实验指导 理工组:张延鹏 实验一 基本电工仪表的使用与测量误差的计算 一、实验目的 1.熟悉实验台上仪表的使用和布局; 2.熟悉恒压源与恒流源的使用和布局; 3.掌握电压表、电流表内电阻的测量方法; 4.掌握电工仪表测量误差的计算方法。 二、实验原理 通常,用电压表和电流表测量电路中的电压和电流,而电压表和电流表都具有一定的内阻,分别用R V 和R A 表示。如图1-1所示,测量电阻R 2两端电压U 2时,电压表与R 2并 联,只有电压表内阻R V 无穷大,才不会改变电路原来的状态。如果测量电路的电流I ,电流表串入电路,要想不改变电路原来的状态,电流表的内阻R A 必须等于零。但实际使用的电压表和电流表一般都不能满足上述要求,即它们的内阻不可 能为无穷大或者为零,因此,当仪表接入电路时都会使原来的状态发生变化,使被测的读数值与电路原来的实际值之间产生误差,这种由于仪表内阻引入的测量误差,称之为方法误差。显然,方法误差值的大小与仪表本身内阻值的大小密切相关,我们总是希望电压表的内阻越接近无穷大越好,而电流表的内阻越接近零越好。 可见,仪表的内阻是一个十分关键的参数。通常用以下方法测量仪表的内阻。 1.用“分流法”测量电流表的内阻 设被测电流表的内阻为R A ,满量程电流为I m ,测试电路如图1-2所示,首先断开开关S ,调节恒流源的输出电流 I ,使电流表指针达到满偏转,即I =I A =I m 。然后和上开关 S ,并保持I 值不变,调节电阻箱R 的阻值,使电流表的指针在1/2满量程位置,即I A = I S = I m / 2 则电流表的内阻R A =R 。 2.用“分压法”测量电压表的内阻 设被测电压表的内阻为R V ,满量程电压为U m ,测试电路如图1-3所示,首先闭合开关S ,调节恒压源的输出电压U ,使电压表指针达到满偏转,即 U =U V =U m 。然后断开开关S ,并保持U 值不变,调 节电阻箱R 的阻值,使电压表的指针在1/2满量程位置,即U V = U m = U m / 2 可调恒压源 R V U m 图1-3 图1-2 可调恒流源 R 1 传感器电路噪声的来源 电路设计是传感器性能是否优越的关键因素,由于传感器输出端都是很微小的信号,如果因为噪声导致有用的信号被淹没,那就得不偿失了,所以加强传感器电路的抗干扰设计尤为重要。在这之前,我们必须了解传感器电路噪声的来源,以便找出更好的方法来降低噪声。总的来说,传感器电路噪声主要有一下七种: 低频噪声 低频噪声主要是由于内部的导电微粒不连续造成的。特别是碳膜电阻,其碳质材料内部存在许多微小颗粒,颗粒之间是不连续的,在电流流过时,会使电阻的导电率发生变化引起电流的变化,产生类似接触不良的闪爆电弧。另外,晶体管也可能产生相似的爆裂噪声和闪烁噪声,其产生机理与电阻中微粒的不连续性相近,也与晶体管的掺杂程度有关。 半导体器件产生的散粒噪声 由于半导体PN结两端势垒区电压的变化引起累积在此区域的电荷数量改变,从而显现出电容效应。当外加正向电压升高时,N区的 电子和P区的空穴向耗尽区运动,相当于对电容充电。当正向电压减小时,它又使电子和空穴远离耗尽区,相当于电容放电。当外加反向电压时,耗尽区的变化相反。当电流流经势垒区时,这种变化会引起流过势垒区的电流产生微小波动,从而产生电流噪声。其产生噪声的大小与温度、频带宽度△f成正比。 高频热噪声 高频热噪声是由于导电体内部电子的无规则运动产生的。温度越高,电子运动就越激烈。导体内部电子的无规则运动会在其内部形成很多微小的电流波动,因其是无序运动,故它的平均总电流为零,但当它作为一个元件(或作为电路的一部分)被接入放大电路后,其内部的电流就会被放大成为噪声源,特别是对工作在高频频段内的电路高频热噪声影响尤甚。 通常在工频内,电路的热噪声与通频带成正比,通频带越宽,电路热噪声的影响就越大。以一个1kΩ的电阻为例,如果电路的通频带为1MHz,则呈现在电阻两端的开路电压噪声有效值为4μV(设温度为室温T=290K)。看起来噪声的电动势并不大,但假设将其接入一个增益为106倍的放大电路时,其输出噪声可达4V,这时对电路的干扰就很大了。 中华人民共和国机械行业标准—正弦规 JB/T7973-1999 正弦规代替JB/T7973-95 Sine bar 范围 本标准规定了精度等级为0级、1级正弦规的型式与尺寸、技术要求、检验方法、标志与包装等。 本标准适用于两圆柱中心距为100mm和200mm的正弦规。 定义 本标准采用下列定义。 正弦规 根据正弦函数原理,利用量块的组合尺寸,以间接方法测量角度的测量器具。 样式与尺寸 正弦规的型式见图1所示(图示仅作图解说明,不表示详细结构)。 图1完 正弦规的其本尺寸见表1的规定。 技术要求 1正弦规工作面不得有严重影响外观和使用性能的裂痕、划痕、锈迹、夹渣等缺陷。 2正弦规主体工作面的硬度不得小于664HV,圆柱工作面的硬度不得小于713HV,挡板工 作面的硬度不得小于478HV。 3正弦规主体工作面的表面粗糙度Ra的最大允许值为0.08μm,圆柱工作面的表面粗糙度Ra的最大允许值为0.04μm,挡板工作面的表面粗糙度Ra的最大允许值为1.25μm。 4正弦规的尺寸偏差、形位公差和综合误差见表2的规定 5正弦规各零件均应去磁,主体和圆柱必须进行稳定性处理 6正弦规应能装置成0°~80°范围内的任意角度,其结构刚性和各零件强度应能适应磨削工作条件,各零件应易于拆卸和修理。 7正弦规的圆柱应采用螺钉可靠地固定在主体上,且不得引起圆柱和主体变形;紧固后的螺钉不得露出圆柱表面。主体上固定圆柱的螺孔不得露出工作面。 检验方法 1圆柱工作面的圆柱度 如图2a)所示,以0级V型架支承圆柱,用分度值为0.001mm的测微仪在圆柱全长的中间及两端A、B、C三个截面上公别测理出转动一周时的最大值和最小值之差。 按图2b)放置圆柱,用分度值为0.001mm的测微仪在圆柱上相隔90°的四条母线(1,2,3,4)上,分别测出中间及两端A、B、C三个位置上的最大值和最小值之差。 两种测理差值中,取最大值,即为圆柱的圆柱度误差。 1-2 什么是测量误差?测量误差有几种表达方式?它们通常应用在什么场合? 测量误差是测得值减去被测值的真值。 测量误差有五种表达方式分别是: (1)绝对误差:当被测量大小相同时,常用绝对误差来评定准确度。 (2)实际相对误差:相对误差常用来表示和比较测量的准确度。 (3)引用误差:引用误差是仪表中通用的一种误差表示方法。 (4)基本误差 (5)附加误差:基本误差和附加误差常用于仪表和传感器中。 1-6 什么是随机误差?系统误差可以分为哪几类?系统误差有哪些检验方法?如何减小和消除系统误差? 在同一测量条件下,多次测量同一量值时,绝对值和符号保持不变,或在条件改变时,按一定规律变化的误差称为系统误差。 系统误差可分为恒值(定值)系统误差和变值系统误差。误差的绝对值和符号已确定的系统误差称为恒值(定值)系统误差;绝对值和符号变化的系统误差称为变值系统误差,变值系统误差又可分为线性系统误差、周期性系统误差和复杂规律系统误差等。 检验方法:实验对比法;残余误差观察法;准则检查法 系统误差的消除: 1. 从产生误差根源上消除系统误差; 2.用修正方法消除系统误差的影响; 3. 在测量系统中采用补偿措施; 4.可用实时反馈修正的办法,来消除复杂的变化系统误差。 1-8什么是粗大误差?如何判断监测数据中存在的粗大误差? 超出在规定条件下的预期的误差成为粗大误差,粗大误差又称为疏忽误差。 判断粗大误差的原则是看测量值是否满足正态分布,要对测量数据进行必要的检验。通常用来判断粗大误差的准则有:3准则(莱以特准则);肖维勒准则;格拉布斯准则。 2-1什么叫传感器?它由哪几部分组成?他们的作用及相互关系如何? 答:传感器是能感受(或响应)规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。 通常传感器有敏感元件和转换元件组成。其中,敏感元件是指传感器中能直接感受或响应被测量的部份;转换元件是指传感器中能将敏感元件感受或响应的被测量转换成适于传输或测量的电信号部份。由于传感器输出信号一般都很微弱,需要有信号调理与转换电路,进行放大、运算调制等,此外信号调理转换电路以及传感器的工作必须要有辅助的电源,因此信号调理转换电路以及所需的电源都应作为传感器组成的一部份。 2-2什么是传感器的静态特性?它有哪些性能指标?分别说明这些性能指标的含义。 传感器的静态特性是指被测量的值处于稳定状态时的输出输入关系。 传感器的静态特性可以用一组性能指标来描述,有灵敏度、迟滞、线性度、重复性和漂移。 ①灵敏度是指传感器输出量增量△y 与引起输出量增量△y的相应输入量增量△x的之比。用S表示灵敏度,即S=△y/△x ②传感器的线性度是指在全量程范围内实际特性曲线与拟合直线之间的最大偏差值与满量程输出值之比。线性度也称为非线性误差,用表示, 即 ③迟滞是指传感器在相同的条件下,输入量由小到大(正行程)及输入量由大到小(反行程)变化期间其输入输出特性曲线不重合的现象。即传感器在全量程范围内最大的迟滞差值与满量程输出值之比称为迟滞误差,用表示, 即: ④重复性是指传感器在相同的工作条件下,输入量按同一方向作全量程连续多次变化时,所 四、测量误差基本知识 1、测量误差分哪两类?它们各有什么特点?测量中对它们的主要处理原则是什么? 2、产生测量误差的原因有哪些?偶然误差有哪些特性? 3、何谓标准差、中误差和极限误差? 4、对某个水平角以等精度观测4个测回,观测值列于下表(表4-1)。计算其算术平均值x、一测回的中误差m及算术平均值的中误差m x。 表4-1 5、对某一三角形(图4-1)的三个内角重复观测了九次,定义其闭合差?=α+β+γ-180?,其结果如下:?1=+3",?2=-5",?3=+6",?4=+1",?5=-3",?6=-4",?7=+3",?8=+7",?9=-8";求此三角形闭合差的中误差m?以及三角形内角的测角中误差mβ。 图 4-1 6、在一个平面三角形中,观测其中两个水平角(内角)α和β,其测角中误差均为m=±20",根据角α和角β可以计算第三个水平角γ,试计算γ角的中误差m γ。 7、量得某一圆形地物直径为64.780m ,求其圆周的长S 。设量测直径的中误差为±5㎜,求其周长的中误差m S 及其相对中误差m S /S 。 8、对某正方形测量了一条边长a =100m ,a m =±25mm ;按S=4a 计算周长和P=a 计算面积,计算周长的中误差m 和面积的中误差p m 。 9、某正方形测量了四条边长a 1=a 2=a 2=a 4=100m ,m =m =m =m =±25mm ;按 S=1a +2a +3a +4a 计算周长和P=(1a ?2a +3a ?4a )/2计算面积,求周长的中误差m 和面积的中误差p m 。 10.误差传播定律应用 (1)(1)已知m a =m c =m ,h=a-b ,求m 。 (2)已知a m =m =±6",β=a-c ,求βm 。 (3)已知a m =m =m ,S=100(a-b) ,求m 。 (4)已知D=() h S -,m =±5mm ,m =±5mm ,求m 。 噪声传感器说明书 1.引脚定义 红色:VCC(5-15V)黄色:信号输出(AO,范围:0.05V —(VCC-1.7))绿色:GND 2.特点: 1.能直接输出线性模拟量,AD采集更加方便解决了很多客户直接采集波形的痛苦。也可以直接作为分贝传感器使用。 2.灵敏度高,店主亲测,在封闭环境中,正常说话10米内可以检测到。 3.供电电压范围宽,本次设计的模块,电源范围可从5-15V。 3.常见问题 1.该模块可以接单片机AI通道,也可以接数据采集卡的AI通道 2.输出仅仅为电压,不能为电流 3.该模块提供给专业人士使用 4.这是模拟量输出模块,不是带有通信功能的采集卡 5.全部资料就是上述网页的描述,不提供其他额外资料 6.该模块为简易分贝测试模块,如果需要高精度、高稳定性的,请绕道。您知道,噪声是相对量,两个品牌的噪声计放在一起,测量出来的结果也是不一样的哦。 武汉亚为电子科技有限公司 噪声传感器说明书 4.引脚定义 红色:VCC(5-15V)黄色:信号输出(AO,范围:0.05V —(VCC-1.7))绿色:GND 5.特点: 1.能直接输出线性模拟量,AD采集更加方便解决了很多客户直接采集波形的痛苦。也可以直接作为分贝传感器使用。 2.灵敏度高,店主亲测,在封闭环境中,正常说话10米内可以检测到。 3.供电电压范围宽,本次设计的模块,电源范围可从5-15V。 6.常见问题 1.该模块可以接单片机AI通道,也可以接数据采集卡的AI通道 2.输出仅仅为电压,不能为电流 3.该模块提供给专业人士使用 4.这是模拟量输出模块,不是带有通信功能的采集卡 5.全部资料就是上述网页的描述,不提供其他额外资料 6.该模块为简易分贝测试模块,如果需要高精度、高稳定性的,请绕道。您知道,噪声是相对量,两个品牌的噪声计放在一起,测量出来的结果也是不一样的哦。 武汉亚为电子科技有限公司 第二章 测量误差的计算基础 测量误差与概率统计学关系密切,下面介绍与测量误差有关的数学基础知识。 一、算术平均值 对某个被测量x 进行n 次测量,所得的n 个测量值(x i ,i=1,2,…,n)的代数和除以n 而得的商,称为算术平均值。即如果有n 个测量值x 1,x 2,…,x n ,那么 式中:x —算术平均值; n —测量次数; x i —第i 个测量值。 对于不含系统误差的测量列在重复性条件或复现性条件下得出n 个观测结果x n ,随机变量x 的期望值μx 的最佳估计是n 次独立观测结果的算术平均值x (x 又称样本平均值)。 [例2—1) 在重复条件下对某被测量重复测量5次,测量值为0.3,0.4,0.7,0.5,0.9,求其算术平均值。 [解] )(154321x x x x x n x ++++= )9.05.07.04.03.0(5 1++++= =0.56(取0.6) 二、残余误差 (一)定义 测量列中的某个测得值(x i )和该测量列的算术平均值(x )之差为残余误差)(i υ,简称残差。 [例2—2] 在重复条件下对某被测量重复测量5次,测量值为:10.4,10.5,10.7,10.6,10.8。求残余误差)(i υ。 [解] )8.106.107.105.104.10(5 1++++=x =10.6 1υ=10.4-10.6=-0.2; 2υ=10.5-10.6=-0.1; 3υ=10.7-10.6=+0.1; 4υ=10.6-10.6=0; 5υ=10.8-10.6=+0.2。 (二)应用 判断x ,i υ计算是否正确,可用∑i υ=0来判定(算术平均值特性之一,算术平均值的另一个特性是:∑2i υ=最小)。当x 计算修约结果产生修 约误差时,∑i υ≠0,此时应满足: 式中:n —测量次数; m —保留位数末位的以10为底幂的指数。 如在[例2—2]中: 0)2.0(0)1.0()1.0()2.0(54321=+++++-+-=++++=∑υυυυυυi 说明;x ,i υ的计算结果正确。 [例2-3] 在重复条件下,对某被测量重复测量7次,测量值为:10.4,对杠杆表和正弦规的使用和测量方法的几点浅见
传感器电路的噪声及其抗干扰技术研究
互换性实验指导
传感器与检测技术试卷及答案
传感器的噪声及其抑制方法
压力传感器测量误差不确定度分析
测量误差及其处理的基本知识
传感器的灵敏度,低频噪声特性和动态响应范围
《机械测量技术》1-21 正弦规的使用
误差的估算
CRY2110噪声传感器使用说明书V1.3-噪声传感器厂家
温度传感器在测量中的四大误差
实验一基本电工仪表的使用与测量误差的计算
传感器电路噪声的来源
正弦规
传感器简答题
测量误差基本知识
噪声传感器说明书
第2章测量误差的计算基础
相关主题
文本预览