
DP-KD-320底盘实物图:DP-KD-320底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格
3T 30km/h 23000元3000mm 2300mm 620mm 齿顶直径:461mm KD-320 350公斤(含电机
减速机的重量
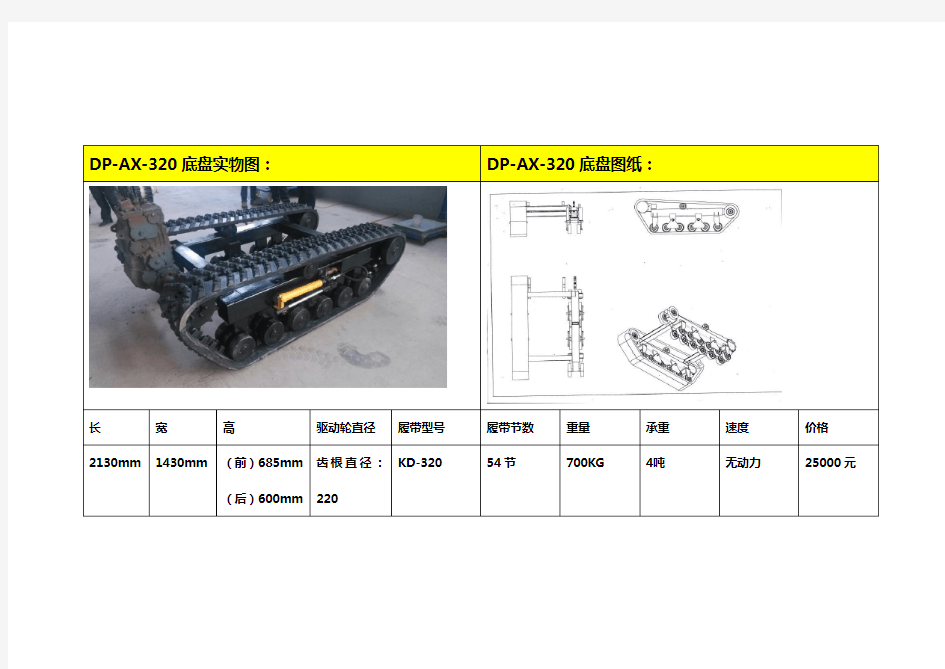
DP-AX-320底盘实物图:DP-AX-320底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格
2130mm 1430mm (前)685mm
(后)600mm 齿根直径:
220
KD-320 54节700KG 4吨无动力25000元
DP-LJX-320底盘实物图:DP-LJX-320底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格2600MM 1630MM 800MM 齿根直径:KD-320 65节878kg 4吨无动力20000元
DP-CQ-320底盘实物图:DP-CQ-320底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格3000MM 1800MM 950MM 齿根直径:KD-320 138节800kg 3吨无动力28000元
DP-HA-320底盘实物图:DP-HA-320底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格3880mm 2600mm 580mm 齿顶直径:350mm QATV-320 2.5T 8T 无动力36000元
DP-LFG-400底盘实物图:DP-LFG-400底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格
YQZG-400 4T 无动力26000元2700mm 1880mm 630mm 齿根直径:
470mm
DP-LFG-400底盘实物图:DP-LFG-400底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格2600mm 1600mm 630mm 齿根直径:562.77 YQZG-400 87节4T 8KM/H 26000元
DP-DQ-400底盘实物图DP-DQ-400底盘图纸
长宽高驱动轮直径履带型号履带节数重量承重速度价格2640MM 1800MM 660MM 380mm YQZG-400 78节730公斤4T 无动力26000元
DP-YQZG-400底盘实物图:DP-YQZG-400底盘图纸:
长宽高驱动轮直径履带型号履带节数重量承重速度价格3000mm 1800mm 765mm 齿顶直径:727mm YQZG-400 100节 2.5吨6T 无动力38000元
电子控制系统的组成和工作过程 一、教学分析 1.教材分析 本课是第一章第二节“电子控制系统的组成和工作过程”。从对比分析两种路灯控制系统的基本组成入手,再通过搭接一个路灯自动控制的电子模型,来学习电子控制系统的基本组成和工作过程,从而为学生学习后面各章提供了一把钥匙。 2.学情分析 学生在通用技术必修2的学习中,已学过关于控制系统的一些概念,例如输入、控制、输出,以及功能模拟方法的含义,但对电子控制系统内部电子元件,例如发光二极管、光敏电阻、三极管等的工作原理不太了解,教师可用通俗的语言补充解释其作用,以利于学生的学习。 二、教学目标 1.知识与技能目标 (1)知道电子控制系统的基本组成。 (2)能用方框图分析生活中常见电子控制系统的工作过程。 2.过程与方法目标 (1)通过对两种路灯控制系统方框图的对照,知道电子控制系统的基本组成。 (2)通过搭接一个路灯自动控制的电子模型,加深对电子控制系统组成的理解。 3.情感态度和价值观目标 (1)激发学生动手尝试的兴趣和热爱技术的情感。 (2)提高学生比较及分析电子控制系统的能力。 三、教学重难点 1.重点 (1)电子控制系统的基本组成。 (2)能用方框图分析生活中常见电子控制系统的工作过程。 2.难点 电子控制系统内部常见电子元件的工作原理。 四、教学策略 本节课程以多媒体技术为辅助教学手段,通过观察、基本知识讲授、小组探究、分析表达、技术试验、能力展示等教学方法和策略,在教师指导下,通过学生自主探究建构知识和技能。 五、教学准备 通用技术专用教室、多媒体、课件、路灯自动控制模型。 六、课时安排 共1课时 七、教学过程 (一)新课导入 教师展示:路灯自动控制模型 板书:第一章电子控制系统概述 第二节电子控制系统的组成和工作过程
目录 摘要 1汽车底盘电子控制的理论基础和特点 2汽车底盘常见的电子控制系统 2.1汽车防抱死制动系统ABS 2.11奥迪A6汽车ABS工作原理 2.12牵引力控制系统TCS 2.13汽车动力学电子稳定控制系统ESP 3底盘电子控制网络化和全局协调化的发展趋势3.1全方位底盘控制GCC 3.2汽车开放性系统构架AUTOSAR 4汽车底盘线控技术的应用和发展趋势 4.1汽车线控技术特点 4.2线控转向系统 4.3线控制动技术 5总结与展望 参考文献 谢辞
汽车底盘控制技术的发展状况和发展趋势的研究 吴玉凯 (德州学院汽车工程学院山东德州253023) 摘要:汽车电子控制系统在汽车底盘技术中的广泛应用大大改善了汽车的主动安全性。底盘控制系统可以分为制动控制, 牵引控制,转向控制和悬架控制。介绍通过高速网络将各控制系统联成一体形成的全方位底盘控制(GCC),汽车开放性系统的构架工程(AUTOSAR)和底盘的线控技术(X2by2wire)。 关键词:底盘控制系统,主动安全性,综述 1汽车底盘电子控制的理论基础和特点 汽车底盘最主要的功能是让汽车按驾驶员的意愿行驶。从图1可以得出驾驶员通过操纵元件来传送其意向,执行量是前轮转角和车轮上的驱动力,实际起作用的是轮胎纵向力和侧向力。所以汽车底盘的原理在给定的路面系数和车轮法像力的情况下对车轮滑动率和侧偏角进行合理的控制,来调节轮胎的侧向力和纵向力,最大限度的利用好轮胎与路面之间的附着力,提高汽车的主动安全性,机动性,舒适性[1]。
图1驾驶员,轮胎力,汽车运动的相互关系 汽车底盘的电子控制相当复杂,互相影响,具有以下特点: (1)不同的控制系统经常共用同一电子原器件。如轮速传感器的信号几乎被所有底盘控制系统所使用。 (2)相同的控制目标可由不同的控制系统单独或共同控制。譬如汽车在路面上制动时,ABS,AFS,RWS,ESP控制汽车的稳定。 (3)同一个控制系统会对多个变量进行同一控制,而且拥有多个执行机构。(4)同一个控制变量同时受不同的控制系统控制。如车轮滑动率同时受ABS,ESP控制[2]。 2汽车底盘常见的电子控制系统 2.1汽车防抱死制动系统ABS(an tick brake system) 当汽车制动时,车轮滑动率在30%左右时,制动力系数越大(图2),当制动力矩再增加,制动力系数减小。车轮滑动率大于Ko时制动力系数处于非稳定区域。从侧向力系数和滑动率的关系曲线判断滑动率越小侧向力系数越大。当车轮全部抱死时,其侧向力系数为零,其失去了承受侧向力的能力,前轮如果发生这种现
底盘电子控制系统 1.全电路控制系统 BBW是一种全新的制动模式, BBW是一种新型的智能化制动系统,它采用嵌人式总线技术,可以与防抱死制动系统(ABS)、牵引力控制系统(TCS)、电子稳定性控制程序(ESP)、主动防撞系统(ACC)等汽车主动安全系统更加方便地协同工作,通过优化微处理器中的控制算法,可以精确地调整制动系统的工作过程,提高车辆的制动效果,加强汽车的制动安全性能。BBW以电能作为能量来源,通过电机或电磁铁驱动制动器。因此,BBW的结构简洁,更趋向于模块化,安装和维修更简单方便。 控制单元是BBW的控制核心,它负责BBW信号的收集和处理,并对信号的推理判断以及据此向制动器发出制动信号。此外,根据汽车智能化的发展趋势,汽车底盘上的各种电子控制系统将与制动控制系统高度集成,同时在功能上趋于互补。 BBW采用双重闭环控制方式,首先在各个电能制动器中都有制动力矩传感器,可以实时地监控制动力矩的大小,实现制动力矩的闭环控制。其次在制动过程中,各车轮转速传感器时刻监视着车轮的运转过程,ABS根据车轮转速传感器的信号判断车轮的运转状态。 根据目前BBW的研究成果,投入使用还需要解决一系列问题,其中主要是电能制动器结构和性能的改善。电能制动器要保证能够独立对车辆实施有效制动,必须能产生足够大的制动力矩,对内部的驱动电机(或驱动电磁铁体)、驱动力矩的传动系统、外部的供电系统提出了较高的要求。现在比较成熟的想法是提高汽车的供电电压,从原来的12 V提高到42 V,提高电压可以有效地解决BBW的能源问题。 2.后轮转向系统 RWS能主动让汽车两后轮的横拉杆相对于车身作侧向运动,使两后轮产生一转向角。RWS是由电子控制单元、传感器和执行机构等组成。其执行机构有整体式和分离式两种。整体式是指汽车两后轮的横拉杆由同一个执行机构调节;而分离式则指汽车两后轮的横拉杆由两个不同执行机构来调节。对于整体式RWS执行机构,用一个横拉杆位移传感器就能确定两后轮的转向角。但分离式RWS执行机构需要至少两个位移传感器。由于分离式RWS执行机构的元件多,两后轮的控制和协调比较复杂,现在研发更多的是整体式RWS执行机构。整体式RWS执行机构又分液压式和机电式两种。执行机构,由电动机、螺母螺杆驱动机构和安全锁止机构等组成。为了提高系统的可靠性,执行机构里安装了一个电机转角传感器和一个螺杆位移传感器。当RWS出现故障时,电动机自动锁止,两后轮的转向角不再发生变化,直到故障排除。 正常工作时,后轮的转向角是转向盘转向角和汽车行驶速度的函数。汽车低速行驶时,当转向盘的执行机构给后轮一个相应方向相反的转向角。从而使汽车在低速拐弯或停车时,转弯半径变小,使汽车转向和停车更方便快速、舒适。当汽车高速行驶时,给后轮一个与前轮转向角方向一致的转向角。汽车的前后轮同时向同一方向转向,可提高汽车的方向稳定性,特别是汽车在高速行驶换道时,汽车不必要的横摆运动会大大减小,从而增强了汽车的方向稳定性,当汽车在L2路面制动时,同系统相配合,可及时通过主动后轮转向角来平衡制动力所产生的横摆力矩,既能保持汽车的方向稳定性,又能最大限度地利用前轮的制动力,改进汽车的制动性能。 3汽车底盘的网络化技术 目前汽车上每个总成几乎是机械、电子和信息一体化装置。在系统中电子和信息
汽车电子控制系统 概述
第四章汽车电子控制系统概述 第一节汽车电子技术的发展背景 汽车既可作为生产运输的生产用品, 又可作为代步、休闲、旅游等消费用品, 汽车技术的发展是人类文明史的见证。随着社会、经济的发展, 汽车成为人类密不可分的伙伴。当然, 汽车的发展也带来了一些负面的影响, 如随着汽车保有量的增加, 交通条件、安全、环境污染也成了日益严重的问题。汽车的安全、环保和节能是当今汽车技术发展的主要方向。 一、安全、环保和节能推动了汽车技术的发展 汽车的安全性是人类社会的一大祸害, 车辆的制动安全性、驱动安全性与行驶安全性是道路交通安全事故的三大主要根源。全世界每年由于交通事故死亡约50万人, 排在人类死亡原因的第10位; 中国当前每年因交通事故死亡占全国总死亡人数的1.5%, 约每年10万人。为此, 科技人员从汽车的主动安全性和被动安全性两个方面着手, 设计了防滑控制系统、车辆姿态控制系统、智能防撞预警与应急保护系统、碰撞后的保护系统等一系列电子控制装置。 HC和NOx 混合在一起, 在强烈的阳光照射下, 会发生一系列光化学反应, 产生臭氧和各种化合物。臭氧( O3) 具有很强的氧化性和毒性。1963年美国洛杉矶地区发生了光化学烟雾事件, 促使各国对大气污染的重视研究。据统计, 城市大气污染物一氧化碳( CO) 、碳氢化合物( HC) 和氮氧化物( NOx) 的主要污染源是汽车排气。因此, 世界各国都相继制订了日益严格的汽车排放物限制法规。另外, 随着汽车保有量的增加, 汽车噪声也是环境保护的重点治理对象。于是, 现代轿车普遍装有喷油与点火控制、废气再循环及三元催化等发动机尾气控制装置。人们还在降低机械噪声、隔振、隔音等方面进行了大量的实验与改进工作。 进入二十世纪70年代, 全球的石油危机, 使汽车节能问题受到
# 底盘电控技术总复习 一、填空题。 1、液力自动变速器主要由液力变矩器、机械变速器、液压控制系统、冷却滤油装置等组成。电控液力自动变速器除上述四部分外还有电子控制系统。 2、自动变速器的液位过低或主油压过低,将导致变速器打滑。 3、装有ABS的汽车在仪表盘上设有制动警告灯(红色)和ABS系统故障警告灯(黄色)。正常情况下,点火开关打开,ABS故障警告灯和制动警告灯应闪亮约2s,一旦发动机运转起来,驻车制动杆在释放位置,两个警告灯应同时灭,否则说明 ABS 有故障。 4、对于纵向附着系数,随着滑移率的迅速增加,并在 S=20%左右时,纵向附着系数最大。 5.汽车电子控制悬架系统应用的传感器有车身高度传感器;车速传感器;转向盘转角传感器;节气门位置传感器等。 6.评价制动效能的主要评价指标有制动距离;制动时间;制动减速度。 & 7.电动式动力转向系统需要控制电机电流的方向和幅值. 8.循环式制动压力调节器在汽车制动过程中,ECU 控制流经制动压力调节器电磁线圈的电流大小,使 ABS 处于升压;保压、减压三种状态。 9.汽车不能行驶,最常见的故障是超速档离合器。 10.驱动防滑转系统是通过调节驱动车轮的驱动力来实现驱动车轮滑转控制的。 11、改变空气悬架主、辅气室之间的通道大小,可以改变主气室被压缩的空气量,进而改变空气悬架的刚度。 12、如图1带锁止离合器的液力变矩器结构和控制原理图,1是导轮,2是单向离合器。当锁止离合器分离时,液力变矩器中是液力传动(填机械或液力),传动效率较低(较高或较低),能(能或不能)变矩。下图位置,锁止离合器是分离状态(填接合或分离)。 二、选择题 < 1.在模式选择开关中,表示自动、运动的运行模式是( B) A Auto、 NormaL B Auto、 Sport C Manu、NormaL D Manu、Sport 2、自动变速器换挡执行元件中的制动器用于( D ) A、行车制动 B、驻车制动 C、发动机制动 D、固定行星齿轮机构中的元件 3、自动变速器处于倒挡时,其( C)固定。 A、太阳轮 B、齿圈 C、行星架 D、行星轮 4、关于ABS和ASR,下面说法不正确的是( D )。 A、ABS控制所有车轮 B、ASR仅控制驱动轮 .
底盘电子控制系统 底盘汽车电子控制系统包括电控自动变速器(ECAT)、防抱死制动系统(ABS)与驱动防滑系统(ASR)、电子转向助力系统(EPS)、电控四轮驱动技术(4WD)、电子稳定程序(ESP)、自适应悬挂系统(ASS)、巡行控制系统(CCS)等。 1.电控自动变速器 一般来说,汽车驱动轮所需的转速和转矩,与发动机所能提供的转速和转矩有较大差别,因而需要传动系统来改变从发动机到驱动轮之间的传动比,将发动机的动力传至驱动轮,以便能够适应外界负载与道路条件变化的需要。此外,停车、倒车等也靠传动系统来实现,适时地协调发动机与传动系统的工作状况,充分地发挥动力传动系统的潜力,使其达到最佳的匹配,这是变速控制系统的根本任务。电控自动变速器(ECAT)可以根据发动机的载荷、转速、车速、制动器工作状态及驾驶员所控制的各种参数,经计算、判断后自动地按照换挡特性改变变速比,从而实现变速器换挡的最佳控制,得到最佳挡位和最佳换挡时间。该装置具有传动效率高、低油耗、换挡舒适性好、行驶平稳性好以及变速器使用寿命长等优点。采用电子技术特别是微电子技术控制变速系统,己经成为当前汽车实现自动变速功能的主要方法。 2.防抱死制动系统与驱动防滑系统 汽车防抱死制动系统(ABS)可以感知制动轮每一瞬时的运动状态,通过控制防止汽车制动时车轮的抱死来保证车轮与地面达到最佳滑移率,从而使汽车在各种路面上制动时,车轮与地面都能达到纵向的峰值附着系数和较大的侧向附着系数,以保证车辆制动时不发生抱死滑移、失去转向能力等不安全因素,可使汽车在制动时维持方向稳定性和缩短制动距离,有效地提高了行车的安全性。它是在汽车安全上最有价值 的一项应用。 汽车制动防抱死系统的功能完善和扩展则是驱动防滑系统(ASR),两系统有许多共同组件。该系统利用驱动轮上的转速传感器感受驱动轮是否打滑,当打滑时,控制元件便通过制动或通过节气门降低转速,使之不再打滑。它实质上是一种速度调节器,可以在起步和弯道中速度发生急剧变化时,改善车轮与路
汽车底盘控制技术的研究 1 汽车底盘电子控制的理论基础和特征 汽车底盘最主要的功能就是让汽车按驾驶员的意愿作相应的加速、减速和转向运动。由图1可见,驾驶员是通过汽车里的操纵元件(转向盘、油门和制动踏板)来表达其意向,相应的执行量是前轮的转向角及车轮上的驱动力矩或制动力矩,真正起作用的是轮胎的纵向力和侧向力。汽车轮胎力的主要影响因素是路面的附着系数、车轮的法向力、车轮滑动(转)率和车轮侧偏角。因此,汽车底盘控制的基本思路和原理就是在给定的路面附着系数和车轮法向力的情况下对车轮滑动(转)率和侧偏角进行适当的影响和控制,来间接调控轮胎的纵向力和侧向力,最大限度地利用轮胎和路面之间的附着力,提高汽车的主动安全性、机动性和舒适性。 汽车底盘的电子控制是一个多系统相互影响,相互作用的复杂系统工程,具有以下特征。 图1 驾驶员、轮胎力和汽车运动的相互关系 (1)不同的控制系统经常共用同一传感器、执行机构、甚至电子控制单元。如轮速传感器的信号几乎被所有。的底盘控制系统所使用。
(2)同一个控制目标可由不同的控制系统单独或者共同来控制。如汽车在离散型路面上制动时方向稳定性可通过ABS、ESP、AFS和RWS来控制。 (3)同一个控制系统可能会对多个变量同时进行控制,并且拥有多个执行机构。如TCS的控制变量有车轮的滑转率和车轮的角加速度,其执行机构有发动机节气门开度的调节器和轮缸里制动液压的调节装置。 (4)同一个控制变量同时受不同的控制系统所控制。如车轮滑动率同时受ABS和ESP的控制。 2 汽车底盘常见的电子控制系统 2.1 汽车制动和驱动的电子控制系统 2.1.1 汽车防抱死制动系统ABS(antilock brake system) 汽车在制动过程中,当车轮滑动率在30%左右时,制动力系数最大(见图2)。此时车轮能获得的地面制动力也最大。当制动力矩进一步增加,车轮滑动率将快速增大,制动力系数不但不再增大了,反而逐渐减小。显然,车轮滑动率在大于入时,制动力系数处于非稳定区域。因此希望将车轮滑动率控制在稳定区域里。从侧向力系数和滑动率的关系曲线可以看出,滑动率越小,侧向力系数越大。当车轮完全抱死时,其侧向力系数几乎为零,完全失去了承受侧向力的能力。当这种现象发生在前轮时,汽车失去转向能力;如果发生在后轮,汽车将发生后轴侧滑,失去稳定性。把滑动率保持在稳定区域里就是ABS的主要控制目标。
汽车电子控制系统 概述 第四章汽车电子控制系统概述第一节汽车电子技术的发展背景汽车既可作为生产运输的生产用品, 又可作为代步、休闲、旅游等消费用品, 汽车技术的发展是人类文明史的见证。随着社会、经济的发展, 汽车成为人类密不可分的伙伴。当然, 汽车的发展也带来了一些负面的影响, 如随着汽车保有量的增加, 交通条件、安全、环境污染也成了日益严重的问题。汽车的安全、环保和节能是当今汽车技术发展的主要方向。 一、安全、环保和节能推动了汽车技术的发展汽车的安全性是人类社会的一大祸害, 车辆的制动安全性、驱动安全性与行驶安全性是道路交通安全事故的三大主要根源。全世界每年由于交通事故死亡约50 万人, 排在人类死亡原因的第10位; 中国当前每年因交通事故死亡占全
国总死亡人数的 1.5%, 约每年10 万人。为此, 科技人员从汽车的主动安全性和被动安全性两个方面着手, 设计了防滑控制系统、车辆姿态控制系统、智能防撞预警与应急保护系统、碰撞后的保护系统等一系列电子控制装置。 HC 和NOx 混合在一起, 在强烈的阳光照射下, 会发生一系列光化学反应, 产生臭氧和各种化合物。臭氧( O3) 具有很强的氧化性和毒性。1963 年美国洛杉矶地区发生了光化学烟雾事件, 促使各国对大气污染的重视研究。据统计, 城市大气污染物一氧化碳( CO) 、碳氢化合物( HC) 和氮氧化物( NOx) 的主要污染源是汽车排气。因此, 世界各国都相继制订了日益严格的汽车排放物限制法规。另外, 随着汽车保有量的增加, 汽车噪声也是环境保护的重点治理对象。于是, 现代轿车普遍装有喷油与点火控制、废气再循环及三元催化等发动机尾气控制装置。人们还在降低机械噪声、隔振、隔音等方面进行了大量的实验与改进工作。 进入二十世纪70 年代, 全球的石油危机, 使汽车节能问题受到世界各国高度重视, 汽车耗油量被相应的法规限制, 并成为汽车报废的一个主要标志。到二十世纪末, 美国政府提出了耗油为3L/100km 的” 3 升车”计划。传统的化油器等发动机部件虽然有了很大的改进, 依然满足不了排放和油耗两大法规的要求。可见, 传统技术已无能为力, 只有采用汽油喷射及电子点火等易于应用的电子控制新技术, 才能有所突破。 二、电子信息技术的发展推进了汽车技术向集成与智能迈进汽车技术特别是汽车电子控制技术在世界较发达国家发展迅猛, 其先决条件是电子技术和计算机技术的迅猛发展。二十世纪物理学的革命, 促使半导体技术的迅速发展, 特别是集成电路( IC) 和大规模集成电路( LSI) 及超大规模集成电路( VLSI) 的发展, 使电子元件过渡到了功能块和微型计算机, 不但功能极强, 而且价格便宜, 可靠性好, 结构紧凑, 响应敏捷, 迅速推动了汽车电控技术的发展。
项目1 汽车电子控制系统概述 教学目标: 1、汽车电子技术的发展背景。 2、汽车电子控制系统的一般组成。 3、汽车电子控制技术基础知识。 教学内容: 一、汽车电子技术的发展背景 1、安全、环保和节能推动了汽车技术的发展 2、电子信息技术的发展推进了汽车技术向集成与智能迈进 3、汽车电子技术应用的优越性 由于电子技术、计算机技术和信息技术等新技术的发展和应用,汽车电子控制在控制的精度、范围、适应性和智能化等多方面有了较大发展,实现了汽车的全面优化运行。因此,在降低排放污染、减少燃油消耗、提高安全性和舒适性等方面,电子控制汽车有着明显的优势。 (1)减少汽车修复时间 汽车电气设备的故障约占汽车总故障的1/3。由于汽车构造比较复杂,零部件比较多,工作环境不可控制(如道路条件,环境的温、湿度),加上人为的因素,所以汽车的可靠性差,无故障间隔时间短;随着电气设备在汽车零部件中比例的增加,电气设备的故障率还会提高。由于电子控制汽车均装有自诊断系统,提高了故障诊断的速度和准确性,从而缩短了汽车的修复时间,带来很好的社会效益和经济效益。 (2)节油 汽车发动机采用电子综合优化控制,与传统的化油器式发动机相比,可以节约燃油消耗10%~15%左右。汽车是一个较复杂的多参数控制的机械,而且行驶条件随机变化。对其采用优化控制后,计算机可以对控制对象的有关参数(如温度、气体压力、转速、排气成分)进行适当采样,然后进行数据处理,最终控制汽车的执行机构,这样便可使汽车在最佳工况下工作,以达到节油目的。发动机各部件的优化控制主要有:电子控制点火装置、电子控制汽油喷射和混合气浓度控制装置等,此外还有发动机闭缸控制节油装置、怠速控制、废气再循环控制和爆震控制等优化控制。 (3)减少空气污染
汽车底盘电控系统检修(含自动变速器) 项目一电控自动变速器维修与故障诊断 习题答案 1.简述自动变速器的优缺点。 答案要点:自动变速器的优点有:①操纵简单省力,提高行车安全性,行驶平稳舒适性好。 ②有效地衰减传动系扭转震动,并防止传动系过载。③延长发动机及传动部件寿命,改善和提高汽车的动力性。④减少燃油消耗,降低排放污染。 自动变速器的缺点有:①结构较为复杂,制造难度大,生产成本高。②维修困难。③传动效率低。 2.变矩器的主要组成有哪些?简述其工作过程。 答案要点:液力变矩器由泵轮、导轮、涡轮、单向离合器和锁止离合器组成。 液力变矩器在车辆行驶时的工作过程: (1)车辆停住,发动机怠速运转 当发动机怠速运转时,发动机产生的转矩最小。如使用制动器驻车,涡轮无法转动,此时传送到涡轮的转矩最大,传动效率却为零,所以涡轮总是随时准备以大于发动机所产生的转矩转动, (2)车辆起步时 当解除制动时,涡轮与变速器输入轴一起转动。因此,在加速踏板踩下时,涡轮就与泵轮转速及转矩成正比地输出,以大于发动机所产生的转矩转动,传动效率也随之激增,使得车辆前进。 (3)车辆低速行驶时 随着车速提高,涡轮的转速迅速接近泵轮的转速,从而转矩比也接近1。当涡轮与泵轮的转速比接近耦合点时,涡轮流出的部分液体开始冲击定轮叶片背面,定轮转动,使传动效率不致进一步下降,转矩成倍放大效应下降。 (4)车辆以中、高速行驶时 这时,液力变矩器仅仅起到液力耦合器的作用,涡轮以与泵轮几乎一样的转速转动。转矩比几乎为1∶1。但是由于液流的摩擦及撞击,使液流温度上升,液流的循环使一部分动能消耗。这时锁止离合器工作,使传动效率达到95%左右。 3.简述齿轮传动机构的特点。选择某种类型的自动变速器,画出它各个挡位的动力传动路线图。 答案要点:行星齿轮机构的作用是改变液力变矩器输出转速大小和转动的方向,并将输出功率传送至主传动机构。行星齿轮机构由太阳轮、行星齿轮及行星齿轮架、齿圈组成。太阳轮与行星轮属于外啮合,因此,两轮的旋转方向永远是相反的。而行星轮与齿圈的啮合属内啮合,行星轮与齿圈的旋转方向是相同的。 如丰田A43D自动变速器D位(前进)或2位1档动力传递路线图:
1.ESP系统主要由控制单元及、、 、等组成。 2.基于车轮速度、转向角度、侧向加速度及横向移动等数据,ESP能够计算车辆是否遵照驾驶员提出的转向要求行驶。() 3. 车辆若产生制动失控危险,ESP会在瞬间减小发动机功率。() 4.简述ESP工作原理。 5.ESP在工作时其ECU持续检测并判断的输入信号有哪些? 6.参照教材P51第二题,请写出答案。 (1)(2)(3)(4)(5) (6)(7)(8)(9)(10)
1.行车时若紧急踏下制动踏板,车轮可能会在车辆停止前抱死;若前轮抱死则汽车稳定性降低,若后轮抱死则汽车操纵性能降低。() 2.常用轮速传感器有电磁感应式与霍尔式两大类,一般由传感头和齿圈组成。() 3.车轮纯滑动时,滑转率S=100%;车轮处于边滚边滑状态时,0 1.ABS系统是防止制动时车轮,ASR是防止原地不动而不停滑转。 2. ASR的基本组成有、、等,其传感器主要是和。 3. ASR不起作用时,辅助节气门处于全闭位置;当起作用时,控制器输出信号使辅助节气门驱动机构工作。() 4. ASR可以通过调节作用于驱动轮上的驱动力矩和制动力矩,防止其在驱动过程中发生滑转。() 5.简述ASR工作过程。 6.EPS的组成部件有哪些? 7.参照教材P83第二题,请写出答案。 (1)(2)(3)(4)(5) (6)(7)(8)(9) 底盘综控系统 (Chassis Integrated Control System) 随着电子科技的高速发展,汽车底盘系统也改变了以往那种完全依靠液压或气压执行机构来传递控制力的机械式结构,在电子伺服控制阶段,底盘综合控制系统也“愈演愈烈”.... 1. ECAT:电控自动变速器 (Electric Control Automatic Transmission)ECAT可以根据发动机的载荷、转速、车速、制动器工作状态及驾驶员所控制的各种参数,经计算、判断后自动地改变变速杆的位置,按照换档特性精确地控制变速比,从而实现变速器换挡的最佳控制,得到最佳挡位和最佳换挡时间。 该装置具有传动效率高、低油耗、换档舒适性好、行驶平稳性好以及变速器使用寿命长等优点。采用微电子技术控制变速系统,已经成为当前汽车实现自动变速功能的主要方法。 2. ABS: 防抱死制动系统 (Anti-lock Braking System) ABS在汽车制动时,自动控制和调节制动力的大小,使车轮不被抱死,处于边滚边滑的状态,进而消除制动过程中的侧滑、跑偏、丧失转向能力等非稳定状态,并能够保证车轮与地面的附着力在最大值,以获得良好的制动性能、操纵性能和稳定性能。 3. EBD: 电子制动力分配系统 (Electronic Braking force Distribution System) EBD可依据车辆的重量和路面条件来控制制动过程, 自动以前轮为基准去比较后轮轮胎的滑动率, 如发觉前后车轮有差异,而且差异程度必须被调整时,它就会调整汽车制动液压系统,使前、后轮的液压接近理想化制动力的分布。 因而当紧急刹车时,在ABS动作启动之前,EBD已经平衡了每一个车轮的有效地面抓地力, 防止出现后轮先抱死、甩尾和侧移的情况,改善制动力的平衡并缩短汽车制动距离。 4.ABD:自动制动差速器 (Anti-lock Braking Differential) 当紧急制动时,车会向下点头,车的重量前移,而相应的车的后轮所承担的重量就会减少,严重时可以使后轮失去附着力,这时相当于只有前轮在制动,会造成制动距离过长。而ABD可以有效防止这种情况,它可以通过检测全部车轮的转速发现这一情况,相应的减少后轮制动力,以使其与地面保持有效的摩擦力,同时将前轮制动力加至最大,以达到缩短制动距离的目的。 自动制动差速器是制动力系统的一个新产品,它的主要作用是缩短制动距离,和ABS、EBD等配合适用。ABD与ABS的区别在于,ABS是保证在紧急制动时车轮不被抱死,以达到安全操控的目的,并不能有效的缩短制动距离。而ABD 则是通过EBD在保证车辆不发生侧滑的情况下,允许将制动力加至最大,以有效的缩短制动距离。 5. TCS : 牵引力控制系统 (Traction Control System) 当TCS感应到车轮打滑的时候,首先会经过引擎控制电脑改变引擎点 火的时间,减低引擎扭力输出或是在该轮上施加刹车以防该轮打滑,如果在 打滑很严重的情况下,就再控制引擎供油系统。TCS在运用的时候,变速箱会维持较高的挡位,在油门加重的时候,会避免突然下挡以免打滑的更厉害。 TCS与ABS的区别在于,ABS是利用感测器来检测轮胎何时要被抱死,再 减少该轮的刹车力以防被抱死,它会快速的改变刹车力,以保持该轮在即将被 汽车底盘电控技术 一、名词解释(每题4分,共20分) 1、滑移率S:S=(V-VC)/V×100%。 2、主动悬架:是指悬架的刚度和阻尼系数可根据车辆的运动状况和路面状况进行主动调节的一种悬架。 3、ABS控制通道:ABS系统中能够独立进行制动压力调节的制动管路称为控制通道。 4、三位三通电磁阀:这种电磁阀有三种不同的供电状态,可以控制三条油路的通断,因此称为三位三通电磁阀。 5、主动式TPMS: 二、填空题(每空1分,共35分) 1、液力自动变速器主要由液力变矩器、变速齿轮机构、液压控制系统、电子控制系统等组成。 5、ABS按控制方式可分双参数控制控制方式和单参数控制控制方式两种。 6、装有ABS的汽车在仪表盘上设有制动警告灯(红色)和ABS系统故障警告灯(黄色)。正常情况下,点火开关打开,ABS故障警告灯和制动警告灯应闪亮约 3s ,一旦发动机运转起来,驻车制动杆在释放位置,两个警告灯应点亮,否则说明指示灯本身或线路有故障。 7、写出下列英文缩略的中文含义:ABS 防抱死制动系统;ASR 驱动防滑转调节装置;EBD 电子制动力分配;EPS 电控动力转向;ESP 电子稳定程序;TPMS 汽车轮胎气压监测系统;CVT 无级变速器; 三、判断题(每题1分,共15分) 1、轮胎气压过低会导致爆胎。(对) 2、转向盘转角传感器失效,ESP仍可工作。(错) 3、ASR系统起作用时只对驱动轮控制。(错) 4、ABS作用首先是确保车辆稳定,然后才是提高制动力。(对) 5、只要踩刹车,ABS立即起作用。(错) 6、高速行驶时,动力转向提供的助力越大越好。(错) 7、液压助力转向系统工作时,转向控制阀控制转向助力的大小。(对) 第1章汽车电子控制系统概述 第一节汽车电子技术的发展背景 汽车既可作为生产运输的生产用品,又可作为代步、休闲、旅游等消费用品,汽车技术的发展是人类文明史的见证。随着社会、经济的发展,汽车成为人类密不可分的伙伴。当然,汽车的发展也带来了一些负面的影响,如随着汽车保有量的增加,交通条件、安全、环境污染也成了日益严重的问题。汽车的安全、环保和节能是当今汽车技术发展的主要方向。 一、安全、环保和节能推动了汽车技术的发展 汽车的安全性是人类社会的一大祸害,车辆的制动安全性、驱动安全性与行驶安全性是道路交通安全事故的三大主要根源。全世界每年由于交通事故死亡约50万人,排在人类死亡原因的第10位;我国目前每年因交通事故死亡占全国总死亡人数的1.5%,约每年10万人。为此,科技人员从汽车的主动安全性和被动安全性两个方面着手,设计了防滑控制系统、车辆姿态控制系统、智能防撞预警与应急保护系统、碰撞后的保护系统等一系列电子控制装置。 HC和NOx 混合在一起,在强烈的阳光照射下,会发生一系列光化学反应,产生臭氧和各种化合物。臭氧(O3)具有很强的氧化性和毒性。1963年美国洛杉矶地区发生了光化学烟雾事件,促使各国对大气污染的重视研究。据统计,城市大气污染物一氧化碳(CO)、碳氢化合物(HC)和氮氧化物(NOx)的主要污染源是汽车排气。因此,世界各国都相继制订了日益严格的汽车排放物限制法规。此外,随着汽车保有量的增加,汽车噪声也是环境保护的重点治理对象。于是,现代轿车普遍装有喷油与点火控制、废气再循环及三元催化等发动机尾气控制装置。人们还在降低机械噪声、隔振、隔音等方面进行了大量的实验与改进工作。 进入二十世纪70年代,全球的石油危机,使汽车节能问题受到世界各国高度重视,汽车耗油量被相应的法规限制,并成为汽车报废的一个主要标志。到二十世纪末,美国政府提出了耗油为3L/100km的“3升车”计划。传统的化油器等发动机部件虽然有了很大的改进,仍然满足不了排放和油耗两大法规的要求。可见,传统技术已无能为力,只有采用汽油喷射及电子点火等易于应用的电子控制新技术,才能有所突破。 二、电子信息技术的发展推进了汽车技术向集成与智能迈进 汽车技术特别是汽车电子控制技术在世界较发达国家发展迅猛,其先决条件是电子技术和计算机技术的迅猛发展。二十世纪物理学的革命,促使半导体技术的迅速发展,尤其是集成电路(IC)和大规模集成电路(LSI)及超大规模集成电路(VLSI)的发展,使电子元件过渡到了功能块和微型计算机,不仅功能极强,而且价格便宜,可靠性好,结构紧凑,响应敏捷,迅速推动了汽车电控技术的发展。 由于电子信息技术的发展,以及近年来嵌入式系统、局域网CAN(Controller Area Network)和数据总线DB(Data Bus)技术的成熟,汽车电子控制系统的集成成为汽车技术发展的必然趋势。原先单一项目控制的燃油喷射控制、点火控制、排放控制、自动变速控制等,发展成为多功能的集成控制系统。如:发动机的电子控制技术是从控制点火时刻开始的,上世纪九十年代初发展到汽油喷射、点火控制、排放控制等多项内容复合的发动机集中控制系统;上世纪末又将发动机控制、驱动防滑控制系统等复合,成为动力控制系统或牵引控制系统(TCS, Traction Control System)。又如:戴姆勒—克莱斯勒公司(Daimler—Chrysler) 湖南生物机电职业技术学院学期授课计划 教研室主任签字系主任签字2011年上期 注:以2节课为单位撰写授课计划 湖南生物机电职业技术学院学期授课计划 教研室主任签字系主任签字2011年上期 教师熊少华课程汽车底盘及车身电控技术专业班级汽修313班、314班、315班、316班 注:以2节课为单位撰写授课计划 湖南生物机电职业技术学院 学期授课计划 学期2011年上学期 课程名称汽车底盘及车身电控技术 班级汽修313班、314班、315班、316班任课教师熊少华 计划制定熊少华 教研室主任 系主任 教学院长 2011 年2 月21 日 授课计划说明 共 4 页第 4 页 2010—2011 学年度第二学期汽车底盘与车身电控技术教案 课程代码: 系部:车辆工程系 专业:汽车运用 教研室:汽车 任课教师:熊少华 湖南生物机电职业技术学院 第一章自动变速器 第一节液力变矩器 一、普通液力变矩器 (一)液力变矩器的结构 普通液力变矩器的结构如图9-la所示,由涡轮2、泵轮3和导轮4组成。涡轮与泵轮均为圆盆状,导轮为扇叶状。 这种液力变矩器具有涡轮、泵轮和导轮三个元件,称为三元件液力变矩器或普通液力变矩器。这些轮统称为工作轮或叶轮。 叶轮由铝合金精密铸造而成或由冷轧钢板冲压成形。冲压成形的叶轮内壁上的叶片采用铆接(可拆式)或焊接(焊接式)工艺制成。 可拆式液力变矩器虽然维修方便,但是平衡精度不高,特别是拆修后平衡精度更难保证,因此仅适用于转速较低、动平衡精度要求不高的载货汽车。发动机转速高、平衡精度要求高的小轿车,目前普遍采用焊接式液力变矩器传递扭矩。虽然焊接式液力变矩器不能分解检修,一旦出现故障就需要换总成,但由于其零部件焊接牢固,实用证明极少出现故障。 三元件液力变矩器与液力偶合器的主要区别在于:在涡轮与泵轮内部增设了一个引导液体流向且固定不动的导轮,从而能够增大涡轮的输出扭矩。 第四章汽车电子控制系统概述 第一节汽车电子技术的发展背景 汽车既可作为生产运输的生产用品,又可作为代步、休闲、旅游等消费用品,汽车技术的发展是人类文明史的见证.随着社会、经济的发展,汽车成为人类密不可分的伙伴.当然,汽车的发展也带来了一些负面的影响,如随着汽车保有量的增加,交通条件、安全、环境污染也成了日益严重的问题。汽车的安全、环保和节能是当今汽车技术发展的主要方向。 一、安全、环保和节能推动了汽车技术的发展 汽车的安全性是人类社会的一大祸害,车辆的制动安全性、驱动安全性与行驶安全性是道路交通安全事故的三大主要根源。全世界每年由于交通事故死亡约50万人,排在人类死亡原因的第10位;我国目前每年因交通事故死亡占全国总死亡人数的1。5%,约每年10万人.为此,科技人员从汽车的主动安全性和被动安全性两个方面着手,设计了防滑控制系统、车辆姿态控制系统、智能防撞预警与应急保护系统、碰撞后的保护系统等一系列电子控制装置。 HC和NOx混合在一起,在强烈的阳光照射下,会发生一系列光化学反应,产生臭氧和各种化合物.臭氧(O3)具有很强的氧化性和毒性。1963年美国洛杉矶地区发生了光化学烟雾事件,促使各国对大气污染的重视研究。据统计,城市大气污染物一氧化碳(CO)、碳氢化合物(HC)和氮氧化物(NOx)的主要污染源是汽车排气。因此,世界各国都相继制订了日益严格的汽车排放物限制法规。 此外,随着汽车保有量的增加,汽车噪声也是环境保护的重点治理对象。于是,现代轿车普遍装有喷油与点火控制、废气再循环及三元催化等发动机尾气控制装置。人们还在降低机械噪声、隔振、隔音等方面进行了大量的实验与改进工作。 进入二十世纪70年代,全球的石油危机,使汽车节能问题受到世界各国高度重视,汽车耗油量被相应的法规限制,并成为汽车报废的一个主要标志。到二十世纪末,美国政府提出了耗油为3L/100km的“3升车”计划。传统的化油器等发动机部件虽然有了很大的改进,仍然满足不了排放和油耗两大法规的要求。可见,传统技术已无能为力,只有采用汽油喷射及电子点火等易于应用的电子控制新技术,才能有所突破。 二、电子信息技术的发展推进了汽车技术向集成与智能迈进 汽车技术特别是汽车电子控制技术在世界较发达国家发展迅猛,其先决条件是电子技术和计算机技术的迅猛发展。二十世纪物理学的革命,促使半导体技术的迅速发展,尤其是集成电路(IC)和大规模集成电路(LSI)及超大规模集成电路(VLSI)的发展,使电子元件过渡到了功能块和微型计算机,不仅功能极强,而且价格便宜,可靠性好,结构紧凑,响应敏捷,迅速推动了汽车电控技术的发展。 由于电子信息技术的发展,以及近年来嵌入式系统、局域网CAN (ControllerAreaNetwork)和数据总线DB(DataBus)技术的成熟,汽车电子 一、填空题 1.发动机只有在P.N位时才能起动,如果在P.N位以外也能起动,应调整多功能开关。 2.汽车电子稳定控制(ESP),当车辆转向不足时,ESP系统使用发动机和变速器管理系统并有意识地对位于弯道内侧的后轮实施制动,防止车辆驶出弯道。 3.行星轮与行星架之间的间隙,其标准间隙为0.2~0.6mm 。 4.根据行驶条件,随时对悬架系统的刚度、减振器的阻尼力以及车身的高度和姿势进行调节,使汽车的有关性能始终处于最佳状态的悬架是主动悬架。 5.车轮和车身状态只能被动地取决于路面及行驶状况以及汽车的弹性支承元件、减振器和导向机构的悬架是被动悬架。 6.自动变速器按齿轮变速器的不同分为行星齿轮式和平行轴式两种类型。 7.变矩器的传动比等于涡轮与泵轮之比。 8.自动变速器液压控制系统中调节压力的阀有主调压阀、次级调压阀和节气门阀等。 9.电子控制悬架系统能根据路况和行驶条件主动调节弹簧刚度或减振器阻尼系数,提高乘坐舒适性和操纵稳定性,被称为主动悬架。 10.评价制动效能的主要评价指标有制动距离、制动时间和制动减速度。 11.ABS系统中车速传感器主要由传感器头和齿圈组成。 12.电控ABS由传感器、电子控制单元和执行机构组成。 13.循环式制动压力调节器在汽车制动过程中,ECU 控制流经制动压力调节器电磁线圈的电流大小,使ABS出于升压、保压和减压三种状态。 14.无级自动变速器主动轮组和从动轮组都由可动盘与固定盘组成。 15.ASR的传感器主要是车轮车速传感器和节气门开度传感器。 16.加速度传感器常用的有差动变压器式和球位移动式两种。 17.悬架电子控制单元的ECU一般由输入电路、微处理器、输出电路和电源电路等组成。 18.电子控制动力转向系统,根据动力源不同可分为液压电子控制动力转向系统和电动式电子控制动力转向系统。 19.本田车系ABS采用四轮独立控制方式,每个车轮上有一个制动压力调节器调节制动压力。 20.ABS系统是防止制动时车轮抱死而滑移,ASR是防止驱动轮原地不动而不停的滑转。 21.汽车电子控制悬架系统的执行机构有可调阻尼力减振器,可调节弹簧高度和弹性大小的弹性元件等。 22.ATF是指自动变速器油。 23.做主油压实验时,一般前进挡油压低于倒档油压。 24.车身高度传感器常用的有片簧开关式高度传感器、霍尔集成电路式高度传感器、光电式高度传感器。 25.动力转向系统按控制方式不同,可分为传统动力转向系统和电子控制动力系统。 26.传统液压动力转向系统主要由液压泵、转向动力缸、转向控制阀和机械转向器等组成。 27.自动变速器中,其中制动器和离合器均采用湿式多片式多片式摩擦片。 《汽车底盘电控技术》电子教案 模块一概述 一、汽车底盘电子控制技术的现状 ①电子控制自动变速器ECT ②防抱死制动系统ABS ③驱动轮防滑转调节系统ASR ④电子控制动力转向系统EPS ⑤电子控制悬架系统EMS ⑥电子控制制动力分配系统EBD ⑦电子控制制动辅助系统EBA ⑧电子控制稳定性程序ESP ⑨轮胎中央充放气系统CIDC ⑩自动驱动管理系统ADM 二、自动变速器技术的发展 1938年,通用公司研制了将行星齿轮变速器与液力耦合器结合在一起的液力自动变速器,这是现代轿车自动变速器的雏形。 1942年,通用公司研制的自动变速器上采用了双导轮、可闭锁的综合式变矩器。 1947年,通用公司将液力传动装置用于批量生产的小客车上。 1969年,雷诺(Renault)汽车装备了采用电子计算机控制的液力自动变速 器。 1978年,美国克莱斯勒(Chrysler)公司生产了带锁止式液力变矩器的自动变速器。 1981年起开发出各种采用微处理机的微机控制自动变速系统,实现了自动变速器的智能控制。 1983年,德国博世(Bosch)公司研制成功发动机和自动变速器共用的电子控制单元。 机械式自动变速器(AMT)、无级自动变速器(CVT)快速发展。 三、防抱死制动系统的发展 1920年,英国人霍纳摩尔研制成功了ABS技术,并于1932年申请了第一个防滑专利。 1947年,为在美国飞机上开始采用ABS。 1954年,美国福特(Ford)公司率先在林肯(Lincoln)轿车上采用ABS技术。 1958年,研制成功四轮两通道低选控制式Maxa-ret ABS。 1960年,改造成四通道控制式ABS。 1985年,博世公司对ABS-Ⅱ系统进行了结构简化和系统优化,研制出了经济型防抱死制动系统ABS-ⅡE系统。 三、驱动轮防滑转调节系统的发展 1971年,美国通用汽车公司开始研制通过中断发动机点火来减小发动机输出转矩,进而避免驱动轮滑转的电子控制系统。 《底盘及车身电控系统》期末复习提要 一、填空题: 1、循环式制动压力调节器的工作过程有__常规制动过程__、__减压过程_、_保压过程_和__增压过程_四个过程。 3、安全气囊系统的传感器按其功用的不同可分为_前碰撞_传感器、_中央安全气囊_传感器和_安全_传感器。 12、写出下列系统名称的缩写:电子控制燃油喷射系统_EFI_、电控自动变速器_EAT_、电子控制防抱死系统_ABS_、电控防滑转系统_ASR_、巡航系统_CCS_、电控悬架系统_ECS_、安全气囊系统_SRS_。 14、点火开关ON,安全气囊指示灯亮并持续_6秒_秒左右熄灭,说明SRS 系统工作_正常_ 15、巡航系统是由_操作开关_、_传感器_、_巡航ECU_和_执行器_组成。 16、电控悬架系统可分为_半主动悬架_和_全主动悬架_两种。 18、防抱死制动系统(ABS)主要由_传感器_,_ECU_和_制动压力调节器_所组成。 24、ABS系统要正常工作,必须保证_常规_制动系统正常,而TRC牵引控制系统要正常工作,必须保证_ABS_和_常规_制动系统都要正常。 25、电控调节空气悬架能调节减震器_阻尼力_、_弹簧刚度_和_车身高度_。 27、安全气囊组件主要由_气体发生器_、_点火器_、_气囊_、_饰盖_和_底板_组成。 28、按充气器点火方式的不同,安全气囊可分为_高压储气式_和_固体推进剂式_安全气囊。 29、ABS系统由_传感器__、__ECU_和制动压力调节器组成,液压式制动压力调节器有_循环式_和_可变容积式_两种型式。 31、安全气囊系统线束与保险机构包括 _防止SRS 误爆机构_、_电路连接诊断机构__、___连接器双重锁定机构___、__端子双重锁定机构__和_SRS 线束__。 32、ASR 的控制方式有__对发动机输出转矩进行控制__、__对驱动轮进行制动控制__和___对可变锁止差速器进行控制__。 33、安全气囊传感器装在汽车前部的是_前碰撞_传感器,装在车内或ECU 内的是_中央_传感器。 34、防抱死系统(ABS )须在车速_8_km/h 以上时才起作用。 35、ABS制动压力调节器有_液压_和__气压_两种形式。 36、凌志LS400汽车ABS 的布置形式为_四传感器三通道/前轮独立控制-后轮选择控制方式_,压力调节器的形式为__循环式__;本田车系ABS 的布置形式为_四传感器四通道/前轮独立控制-后轮选择控制方式_,压力调节器的形式为_可变容积式_。 二、选择题 3、为了最大程度地利用附着系数,获得最大的驱动力,同时得到较好的方向稳定性和转向控制能力,防止驱动时车轮滑转,必须将滑移率控制在_A _的目标范围内。 A 、10%~20%; B 、40%~50%; C 、90%~100% 5、三通道式ABS 系统,在ABS 起作用时两后轮的控制按_A _原则进行。 A 、低选; B 、高选; C 、独立控制 16、丰田电子控制悬架系统自诊断时,应短接_B _和_D _端子。 A 、T E1 B 、Tc C 、Ts D 、 E 1 22、安全气囊系统点火器线束插接器设置短路片的目的是_B _。 A 、防止点火器线束短路; B 、防止SRS 误爆; C 、保证插接器连接可靠 27、ABS 起作用时,大约是每秒钟制动_B _次。关于底盘的汽车电子控制系统整辑
汽车底盘电控技术及答案
汽车电子控制系统概述
汽车底盘与车身电控技术教案
【精品】汽车电子控制系统概述
《汽车底盘电控系统检修》复习题
《汽车底盘电控技术》电子教案
《底盘及车身电控系统》期末复习提要
相关主题
文本预览