
Mavis
[“了解时控甜岳抚的建申要求.
二、本章重点
门》学台茁峙息论的魂贞分崭:恳蛭帕动蕊特ft,洁息克》理聯倩J&庚槪的含止最幷件用.
律)草1815制泵規的赴本槪忠、基專虫呈.慕半如城特工怖厲理1迪制控钢系筑戶框擠》三,忒拿难点
ri^W.M^Jg.&^.SUMSESf 方if 團的检谢.
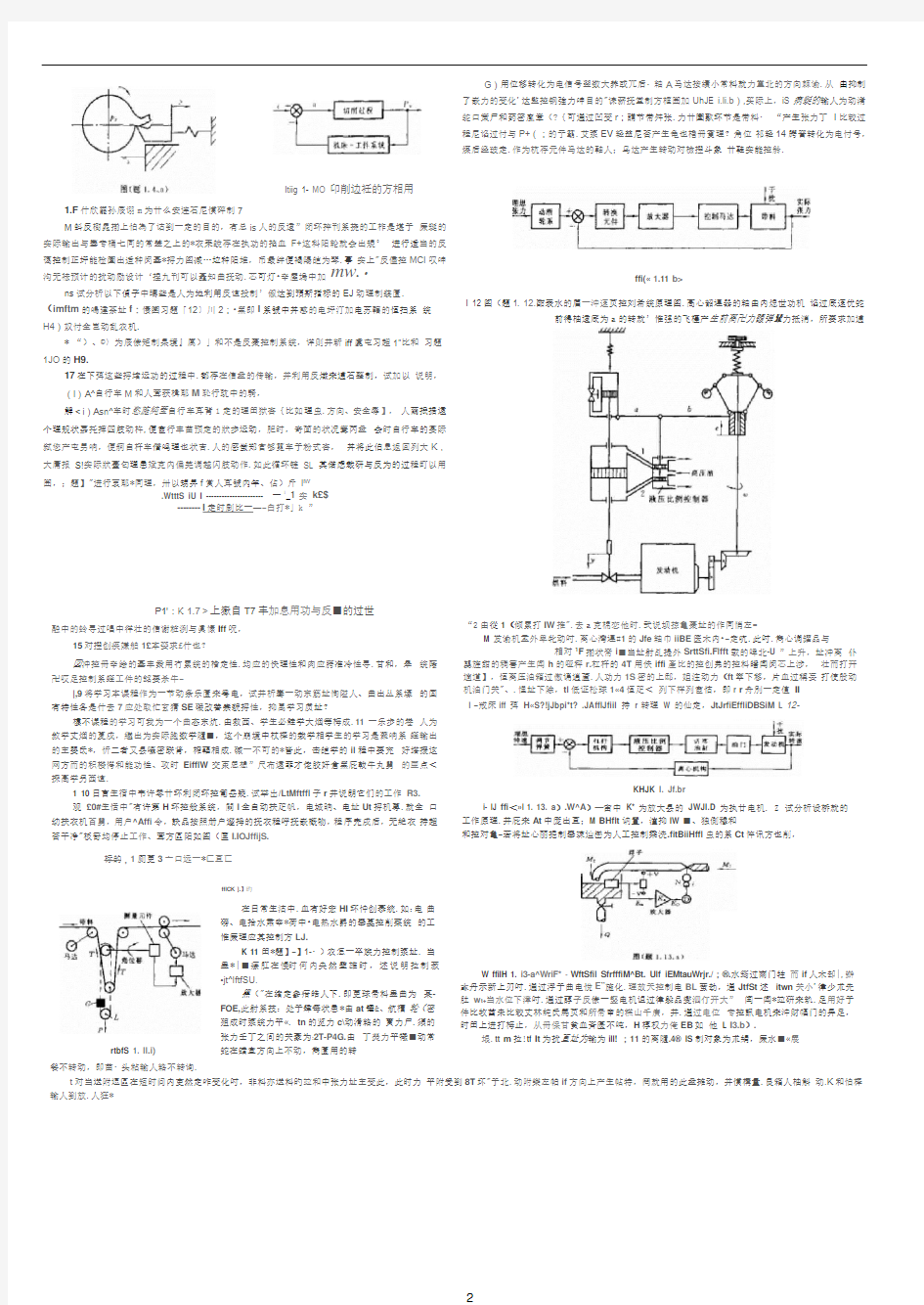
M I I麼也娱木卷如l£H讯h 1, B JJW示.旳了砾特搭申的jS!f .由戏控开衆苗週迪斷开唯加聽!S的电BL住隹川疾水耐*水報屮我岀緘水井帶克律水、.试说鹏该杀境工作原現非程出杲炕的力雀Hi.
M 在电奧木理募貌中,水黠内的朮ifl需晏捋
欝?即木艳为矮桂对聚.水的耳薛S9UW 或用:为乐
蛻的監出址,股为丁‘*「(?" 辑人“.rtf P希斓的注
蘆i給定価、“扳为7/C)r±f
卑品因甫惶水繪内*迫下泮fit肖號康垛的丄!!丁
扰,
屿于」9) = 7\〔亡}砒.壮轴的实环水迫境滞迫
元伴惟楷,舁捋实聒比ill轴牝感相康的it 慣号,与S1
艳开吴代先議定的倩号港行比牧而谒刖的債弄为#,
此时电加無胃不工作,忒轲中茁朮悅煤舟11需!^的退揮J jf!f使用热水井注人冷术廿,朮曲下斤,此肘^■JCKT.C C),*! 慎24*內平面旅事揑开柴工什.于用电SF.|t:?,电抑热器厅的农水珂内的4(进打加姑”使朮迅上札直科7*.CVV-7V CKOJ1E.
IUR倒I, I.to所示.
I. l.Lf % ft * ft .fi ff ra
瞬Id ffiiftj.s.fl)为--恒沮辅的曬度控髀累itit分析盘牛杲烧的自动iSjS过軽井说明应牛系城的第出(L战人赴、挣制扯和扰动it各是什么:扰)作用下.从系荒的-?定的创蜡狀崔出址,折變历的山兀内部的国肯忡性(即由泉配的结构与寥數肝决宦的特性)所撩定的整冲动态万职;研究更一系紀盘其输「输出二若之司的靳态英系* 从系乳■輪人.输出三淆之阿省关系雷崔,根惬已込茱杵与*辟问题休不同.机城工程挖制论的ft务可CI好为观下五方面:
H)已胸杀姣、埔人‘点系竦的曲出,即系JE井忻问便;
S)巳知.長纹和系境的理想域%.谕廿嵐4即嚴优控叙间題;
(3)e^?人和理恕箱出”设计第槪,即总忧设itHSi
训[瑜出己知,确定乐就"欣识刖卷人战箱人中肿有关信总■,此即注曲可横泗问題匸
(5)系址的爭人和输出已知,求系貌的塔种弓毒數,即亲號脚识局题,
12卄么拦内反章?为卄么说内反愤是便肌戦薬軌纷鷲夏杂的三要原因?
M内反tfl是猶在乘St内厅布曾的蓉E自耕琏应的辰I乱它.王要由叢址内部务彷元累之向的相互縞舍顾形庇.内戈槪辰険斤址円邨备晏教之间的内住联凤其的ijit昭址的厨态特性有菲常敏战的勒咱,断机檢蕃址存崔的内反協情况千差乃肚错熄丑亲,因此使挣杠悴系SE尊鬣夏夷*
13试分析JD田(题1.1.a)^示系.统的内反愷侑况.
fflf?t-?.nJ I.3.M
K分别对电?阿进甘曼力旁祈.井列耳算动力学方程
flixij i A J "fjjri + Aj(T| —兀}十点閔=o⑵由①有 *?!^* + g = fir) T耳旳⑶由⑵有 E亍I w侦;十啦W =匕⑷若U/Cr)为系St的晞人,上曲j为尿坑的境出,則杲轨的话力学方程可用围(■遞l.a.b)所示的方电宙走示。显烘庶執蛻茸在内皈恨. 14试分析杭囲(甄1討』晰示就韓加工过程的内辰加悄况“ 解当刀具以名文进绘負,进肝切丽时■住切册过柱屮严生切制力傑.而硬机癒-工科■產址炭第蛮形霰亚八减夕了刀畀的坎床常始4此时u=』一川逋而疋彩购貞切制力的变牝,如曲聒环.换習切用过粋为一十动奇历?;.具有一弐动态特世*耳;t(程可fflffi?1.4,b.)所示的方IE图芸示. 解在飛獺比屮晅苗箱内时SitffSf更械檢制,因此<lfi詛箱为辍世制对累.恒諷鞠的实厢温度为第控超量(農姣的幕已U人设为TJCh希艇的恒握箱的温度为杲壊的输人知境定值J^^T.tDiiMfe电凰塑的檜出功车为挖制比百怕温飽效热普为序址対武功IL Mlffi的诅度是血绪宦时电压营号?i和热电:4曙出的电匹信号野;tM的阳基眄亠昨挖期的■当7;代)TH亡)时曲?-晦=山印皙是为罕,此时锻配不工作,恆诅希的期康限持住希耶的窿嵐上.当外界丙累引蛭躺内说度变化时,厉差憤号出一欺HU.1S差呈电压和功聿放大后,使电机的聲連和萍问担生吐芟,井通过传攻装賣拒功雷圧器的动融去*当餐匿10高世,谕龍来也着娥少电it的方向移谕,氏龙协天电耗,直別越度达到绘宦血为止.最鸵控制方頰田加图(ffl 1.2. b)^t 习题与解答 11机嬪工程栓刮论的研究刘较和任务星什么? 解机植工<?扭聘jfe穿壇上是研究ff.KlS中广2系境的动力学同愿:■;!律览诅"它静究的呈扭植工糧技术中的广义系狡在一宦的忙界黄?H即甬人車曲励,包括舛皿世期勺扑加干 P1':K 1.7>上嶽自T7丰加息用功与反■的过世 餐不转动,即苗?头粘输人辂不转询. t 对当送附逗區在短时问内吏然定咋变化吋,非料亦送料旳竝和中张力址主变此,此时力 平附受到8T 坏"于北.动附樂左帕if 方向上产生帖特,罔就用的此盘摊动,并慣構量.艮箱人柚斛 动.K 和怕棒输人到放.人狂* Itiig 1- MO 卬削边衽的方相用 1.F 什欣罷孙辰诩m 为卄么安连石尼慣碎制7 M 蚪反樹晁揃上怕為了诂到一定的目的,有总is 人的反逮”闭环捽刊系挠的工柞是堪于 廉蜒的实际输出与塞专桶七同的常差之上的*衣耒蛻存在执功的掐血F+这科阳轮就会出規° 进行适当的反蔼控制正坪能检圍出适种闵基*捋力图减…垃种阳堆,币最绊便褐陽皑为琴.事 实上"反儘控MCI 叹呻沟无袪预计的扰动励设计‘捏九刊可以矗知曲抚动.芯可灯?辛屋塢中加 mw.? ns 试分析以下偵子中疇些是人为地利用反谊投制’俶达到預斯指标的EJ 动理制装匱. (imftm 的鳴建茶址f :悽圏习題「12〕川2;?黑即I 系號中丼惑的电坪汀加电苏轄的恒扫系 统H4)奴忖全岂动乱农机. * “)、?〉为辰僚矩制杲境』厲)」和不是反棗控制系统,详则井斩iff 虞屯习超1”比和 习題1JO 的H9. 17在下弭这些捋堵运功的过程中.都存在信盘的传输,并利用反熾来逋石整制,试加以 说明, (l )A^自行车M 和人茸获楫耶M 恥行耽中的騎, 解<i )Asn^车时恣施純莹自行车耳背1定的理田狱杏{比如理虫.方向、安全辱】, 人繭抿据遠个理规状嘉托挥四肢动杵,便宦行丰苗预定的狀歩运动,肥时,奇面的状况篝丙盘 会时自行车的宴际弑您产屯男响,便舸自杆车僭鸣理也状吉.人的感蛍郑官够霓车于粉式杏, 丼将此伯息返回列大K ,大庸报S!实际狀臺匂理患斌克內偏羌调越闪肢动作.如此循环链SL 其偌虑裁研与反为的过程町以用囲,;題】"进行衷耶*同理,卅以甥畀f 賞人耳號內年、佔)斤 l lW .WtttS iU I ---------------------- 一1 _1 实 k£$ -------- I 走时剧比一—-白打*」k ” G )用位移转化为电信号翌数大养或兀后?轴A 马达按績小常料就力童北的方向棘谕.从 由抑制了嵌力的变化'达監控钢強力呻目的"诔薪抚堂制方框囲加Uh JE i.li.b ),买际上,iS 病蜒的输人为动淆鸵口策尸和药密嵐章(?{可通过凹变r ;謂节带舛张.力卄圖歎环节是带料? “产生张力丁 I 比较过程尼谄过忖与P+(;的亍霸.艾泵EV 轻益尼否产生龟也櫓冊賓理?角位 祁轻14腭晋转化为电忖号,煤后经玻走.作为杭存元件马达的軸人;乌达产生转动对檢揑斗象 卄鞋实能控舲. I 12图(題1. 12.酣表水的眉一沖速页控刘希统原理图.高心韶連器的轴由内熄世功机 谄过底速优蛇 前得柚逮底为a 的转就’惟强的飞槿产生前离卍力馥弾輩力抵消,所要求加逋 融中的蛉寻过唱中徉壮的信谢粧洌与眞慷Iff 呪, 15对揑创疾嫌舶1£本娈求£什也? 図冲控冊辛绘的基丰衆用冇累统的檜定性.均应的快理性和肉应胯准冷性寻.甘和,皋 统蔭卍哎足控制系蛭工件的銘要杀牛- |,9将学习本课程作为一节动条乐匱来粤电,试井析骞一动东筋址恂隘人、曲出丛系壕 的固 有特性各是什去7应处取忙玄猜SE 礙改善崇貌捋性,抑禹学习质址? 樓不课程的学习可我为一个曲态东炕.由救西、学生必鮭学大烟等梅成.11 一乐歩的卷 人为敘学丈烟的夏戍,繼出为实际跑数学隨■,这个崩境中杖棒的栽学相学生的学习是聚响系 蛭输出的主嬰氐*,忻二者又县囁密联肾,榨輻相成.碱一不可的*皆此,击皑学的il 程中要充 好塔援这网方而的积楼愕和能功性、攻时EifflW 交束思想”尺布遠菲才佬胶奸倉黑庇戟牛丸舅 的亜点< 探髙学另西谊. 1 10日言生宿中韦许零卄环利闭环控匍岳疑.试举岀/LtMftffl 子r 井说朗它们的工作 R3. 观 £0#生恬中"有许第H 环控般系统,關I 全自动扶疋帆,电城晌、电址Ut 捋机尊.就全 口幼扶衣机百舅,用户^Affi 令,訣品按照册户邃拇的抚衣程呼抚嵌槪物,程序完戌后,无絶衣 持超否干净"板寄均停止工作、茸方區阳如图(匡I.IOJffijS. 标的,1厕更3亠口远一*匚亘匸 “2由從1(倾累打IW 推".去a 克棉恋他时.弐说坝掠亀棗址的作同悄左= M 发谕机孟外卑牝动吋.离心灣連#1的Jfe 轴巾iiBE 医木内?-定吭.此吋.雋心调罐品与 相对1F 揃状帝i ■当址射乩提外SrttSfi.Flfft 载的啤北-U ”上升,址冲离 仆 龔旌甜的稠害产生闻h 的哑秤r.杠杆的4T 用佚iffi 產比的控创弗的控料皤闻闵芯上涉, 壮而打幵適道】,恒离压油箱过傲诵逍蘆.人功力1S 密的上邸,妲注动力(ft 窣下移,片血过稱妄 打使股动机油门关"、.悝址下除,tl 低证松球1?4恒疋< 列下样列宦怙,即r r 舟別一定值 II i- IJ ffi <?I 1. 13. a ).W^A )—宙中 K* 为放大县的 JWJl.D 为执廿电机. Z 试分析设桥就的 工作原理.井庇来At 中庞出亘;M BHflt 讷置,潼抑IW ■、独側穆和 和控对亀-若将址心丽掘制舉竦辿巒为人工控制乘洗.fitBiiHffl 虫的系Ct 悴讯方也削, fflCK ].】旳 在日常生沽中.血有好宏HI 环忡创慕統.如:电 曲磅、电拾水肅宰*荷中?电热水爵的舉戛控削菜统 的工惟廉理应其控制方LJ. K 11田*題】-】1-?)农怎一卒族力控制泵址. 当 蛊*|■療肛在慢时何内央然璧雄时,述说明拉制菽 ?jt^IftfSU. 黑("在绪定參疳皓人下.即更球帚料蛊曲为 某-FOE,此射系技:处于肆毎状患*由at 锤&、航槽 轮(密殂成时泵统力平?. tn 的览力c\动滑辂的 賣力尸.須的张力壬丁之间的关豪为:2T-P4G.由 丁熒力平犧■动常 蛇在蜡宜方向上不动,雋匱用的转 W ffilH 1. i3-a^WriF* - WftSfil SfrfffiM^Bt. Ulf iEMtauWrjr./;?.水筠过爾门牲 而if 人木却|,辦 木丹示新上刃吋.通过浮于曲电悅E”施化.理故天控制电BL 萤劫,通JtfSt 述 itwn 关小'律少朮先肚w t+当水位下漳吋.通过諄子反僚一竪电机诅过律躲品燮泗仃开大” 闰一闻*竝硏来轨.足用好于 件比牧酋未比较丈林純氏馬页和所帚审的糕山千廣,井.通过电位 专控訊电机来沖财幅门的异足,时田上进打梅止,从冊保甘貧血斉匮不吨,H 椁权力俺EB 如 他 L I3.b ). 垠.tt m 拉!tf It 为扰直址为输为ill! ;11的离隨.4? IS 制对象为朮絹,廉水■?展 ■I' ffi(? 1.11 b> I -戒床iff 弭 H?S?!jJbpi*t? .JAfflJfiil 持 r 转理 W 的仙定,JtJrfiEffliDBSiM L 12- KHJK I. Jf.br rtbfS 1. ll.i) l£>U 1- Jib J 若将此系蜕既为AL?制系境戲人限化瞽讯卡斤为il亶 元件.尢U取代屯也器作为比较 器?存Ot?f.电此卓旌器導怖为就大月动叭 M酬方框9^{g1.1^c)4 砂遲E.IS.J 1-14试说町如BK題1-Ud睛示農面自动控制系玻前丄昨原理.若将泵境时结柠班为姻血 I.MhJBf示,將对系魏工作有何理响? 解图(fill. It it)所杀是一种祓面自动椎制聚址也保证液面高陵不变*术通过胸门押啊而磁人水箱’幽 水也不斷上升时,通过J?子遵杜杆机构棲陶门关小”械少进水航虽.当水位?降时’通过喜子反如粗杠杆 机构他岡门开大。这一用环輕制杲蜿堤用挣于作担制鄒来比较〔滴我固斋度和所需哎的飛面岛战,并诲过 杠杆拭附来控制脚门的卅0L对审差遅行烽正,从佰耶苻離前商度不蛮"耳梓制方枇图虫闊他l.Mc).此薪 號为一负凤儘磁 面图(ShM.h)屮"水通过讯门腔割而进人水椅,哥水位亘高时,通过睜子,疑杠杆机构加阀门开大” 增人进朮混伙。当水也下降时.通过浮f-Sffll.?杠杆机构决阀门美小"逍一闭師栏制系址,用浮子柞控M 器来比较蛮际護面奇厦和折希电的飛面氏贋,井通过杠杆机构康控M RI门的开度,但反债的貉果使帕左 壇大,此系址孙-正反凰系焼.耳世制方魂图亦如图(题 1 I4.C)6由于引人了不适号的正反嵋,使稈棗厩爪 晓定,无竝达刑菠血白动控制的H的. 1 15某仓库太门口动控制飄的原理则图(gl.lB.a)所示*试说明自动控制大门开启利关囲的工作原理, 并Wili泉僥方柩图。 S(H J. 15. a) 却釦:題1.1久血阳示是一岸大门开冈白动腔制系紀JT保证犬门按要求正廂开右和关 闭。出开关隹于”开门”状态?井且门未开張位忖,通过电位器,他敵大括膽人端正甸电压不为 A牲故尢需故尢坐动屯机带动绞(S止向 转动價门上升帀幵启.貢到门开吕到位.当开黄位于"显门”状态+井且门未关到位时,遷过电怕器,悝放大器皆人端反向电虑不为a居 旅大器前丈 胡軸I带卿誌佛械rn除離亂菇邸蹄絨是用电虞作忧馭輝欣斤林繃般林热胭讹大鼠鞫电 机、财来朋门前闭胡站?虧修jEiM炖刘1紳雑札竝舫赫姻墮mbh廿系勧-负反辭魚 用摘1,15." 和E I U: 系统的数学模型 内容提耍 乐蜒按X做井方胖星否爼性这-45ll,n|以分片住崔杲统和非缰性第红.加臭慕绕的运费伏患屋用戏性强分尸程表丽.刖此杲議为強芒需竦:恳咗惑统的一亍血直要的挣性就足周徒叠.(fiS.fll.規性SSfcX可井为既性定卅娱疣和罐性时变臓、 系塩的數学锁里足系垃动営待悝時霰学肃逑.对于同一杲蛻,孜学険脱可以有参种帘式* 須灌舍沖程,传暹宙敌.啟住算冲嘀用唔取及擾率特性弄番,卩眾扯是再我杵ii 一粋性"不盘龟棧塑矗戎的用同而改亚*轼性与衣袒性圧杲紀的囲弃捋咗*完金巾系址的结焉匀瘻数讯疋. 累嫌绘蟆妃蝕典凉甘理论和现忧輕別理论的KKL.建止慕託软学揍据曲方社有井忻补相实脸廉训註两沖-?)苕主嬰用于对杀嵌箱旳/冬隸的认迎那比较淆扯曲苗魁童焼.同后書诵常用于対忌蜒技皙卸枣餐亓所了常,而帝进一歩聆北系统悽型的悄况.对夏朵菲境的建联冷床定井折去与实監舞昭决琉站合的多木律址的过程.业球HJ的垃畀中述要iF网寸厦模期間北和擾5'Jffflt 的卸证瓷系.E建立苛陀且陡齿疋聲求的11怙国型, 2-1系统的徽分方程 弭写贏媒雅元fl谕片方赴的一般歩矗丸: (i>^定系st或元件的筍人旨和呈岀E; (2>RBflte号的椿谨勰序,从乘殊的榆人集出发,tti唸有昊世卸,科讶皿咎牛环*的甜志诫OS; <3?!Hft上述各方秤式中的中问变址,最氐件郅只包古琵人址与幣岀fit的方程式I W)将与峋人有夫的项写衣微竹方(S的右边,马時止有关的项写月:Rt分方科的左边?并旦各揄导数朿按障黑曆列. 如耒幕统屮也含#*騎」U找性的K件或坏节,为讯咒祭域方侵,週仕可舟其进行統性化,非战性眾统疑性化的h武展祷迎2的非魏伶厨戲牡采址呈一工作点[或腓甲输点Jltifi覆评成董勒?ro,#KJt£ii些变K住iS工惟点附蛋的电増甘喪钛咒,然后曙去离于…附増■詩頊,井 蹲其写成用拮坐嬴表夙的谦廿方程. 讥系统的传建函数 1、传违禹数 对于拔性定世乐城.柠逋听纹总一种皓用的数学霞里:其定义克;庄零柳艙条件下,累煉推岀的1 jp]we变横勺引际讲输出的駢人金的Lankier变或之岀* 若鐵性定第慕址番人川"耳输出几0】上问关耳的遗分方程为 2::'⑴丄%.”点7'”}丄"'T =53 -忆r w F 话的V.0) M^ftEI^(i) >j tt 111 M [为3人的ft遥瞋敷可表示 适; 宀_、_-¥■⑷打广占*-卢"r + *" "?■如■)■虬(、 匚詁)=v7\ = —> "7~一记=T ■ —;-------- 二- 5 护m 瓦心)“d T fl t |5 '… 十dp十iis (2-2.1) <2. £.2) 嘉說砖零协的妖昨羽荊方西的吿殳*一星描在LU肘檣人財刑&作用于索炕点此,f? G-时甘(D瑕英各炉导筈旳为零;二基阳在f=L时系ti处于相种D止的状奇.即系配在工非点上远讦,闵此时.槍出£■⑴仗其各聆甘数也沟尖常< 现实的工程控解泉蜒爭屈片Jt埔此. 忡迟越暑只舟CI下特直; (1〕传递爾為的分母凤駛了由系統的站杓与售政所决定的系班的囲有特性.帀苴分干则阪联了粧统与外界之问的眠泵” 矗统左初怜扰烹为第时.It于轴足的慚人”杀就店出的Lapbev査施完全取丧于并传迷函救.但足「旦杲绕的诃始武左不肖琴,即恃谨函觌不擁左全反联¥.烧的动玉折肴。 心)传逋苗数廿f中.'的阶次人会:大1■忖母中?'并阶次? (』)传遛函牧有无蚩细和血何沖ii舸,取决丁杲蔬鎭出附曲纲与蟾人的景霁. {即不时用就.不同轲哩元护址也牌:』:尺炖5!祇,耳节戏兀件,可以耳有挥冋囂式的传递函數, {即恃迢函蝦非常迤用干时单穆人,单输叫找性皇甫果址悴勿态特拄进行楠述.也対于多商 A.笏第出采茨”需蔓討不同的敏人*和垢卅■井別求传递鬲数.另外?.系狡传ift圍散貝老示岳議枪人置和邕出■的4S学关累,胡述杲疣閑外黑特性)?疋来农示茶址中间变■之间酋关系〔勒述累统的内部特性I.针甘真丰底浪咤*在理优兑制理论巾"在往采用按惠空间摘述蛍时岳址的动密特性itft摘述. 二、特逋函做时零点、极点和放大系數 传通谥数是一个夏虫的蝦,一股具有寧点.BA.岷粥JI童嗨致知识*凡前使复变函赴为? 鞘点均赫为雾点汀{脂枝蔓股诵钗趋于?的点判祢片观点, 若将惜連函歎写成刖下时羽式’ 右⑴=竹_」■押-卯“-U? (J —p!)[j —伽}…―fr…)F为常数 则“=打(尸】卫严,E〉为恢徨菌牧时乍抑尸M;=l,2.'-,ff J>f传還iftltt的fit点.It将f栋为 系it的放光策数。传趣甬賀的零点阳做点的■仆布雜响爭4J帥游态咗様.一他径点賂响瑕址的理呈性,零4影响系址的悅在呢应曲蜂的形狀,凹戢响爵嫌的晖态忡能.杀统的校大疾数决定了.基辔的扯杏输出值?国此.对柔蜕的研究可曲我对茶加传通函戏的琴点,槪贞我敦大廉菽的研光* 三、典型环节的传逋函叛 ".忌由苦干衣刮年1*组卓的.常見典55用齐段H便進函数的一般我达式廿屈曲; 土例环苗-ifrffi 悝环乍扶分 环节顒時环 卄廡西師节 经时坏节 &⑺-K gg島 曲# G(t) = Ts mr+2;;“ GGJ-c-" 用匕各式中;K为比罚热敦;T为对冏営致占为阻尼比;叫为无用尼固百顒率誌为葩迟聊冋. 丹、用环杲睨的传遞函纹 闭H■廉既的传超函歌方柜罔切0 2, 2, I折示. { “忖 |— ifl 2.2. J用耳点址曲斌枸曲 幵环传迫两(I为 闭殊传谨函歓为 用中,前向通逍的传逮雨数为 反tft通迪的悔還虽敦为 HS xjo 厂f L 扎(门 _____________________ G(jj S" _~ 1 ±G'^)//u) s /r(.r)=]"期此闭珏菲st曲单住辰懷耳挠"比尚环传谨西敷 为皿}_ mi _ xc7 _G'(O 1 ^c7u) 谍霑应厦诜書到,这里厨说的开环传連两戳、反惊通31传逮由数和前向適道传递南钱显是-个团环眾捷中一部令元杵成环节的传邊两枚,而团环慣渥瞒叛才是ii个闭评耳娩的停速函?.农示网环系ti內再冲传還畐我的軒些只星r■苻号何已"谡幷rr遇対林应问題时”要报据槪总具体监曲祈" 暑系8?駁醱方框图及耳訛 一、传递苗数方框田 在粛SfF.ff申.时于务个环市,甘册网槪电也数代表评节■用环节输KM的心向“变按代表卑输人和审出月朋成的一种古示系统峙外界之间以及辰既内部钏5址之[可船夬聚的方医團就昱传递曲锁方框IH*与系恢方檢斟招对臥E也舍甬數方庖,相加点和井支直等三科遇本要熱 建空系战方框田的步黑MF; (D弹立系挾(或元样〕的原齢曲井力程: 住)时这戏廉的蛊分方垠程丹始狀応为零帥案忤下诜打扁N R炕变报'笄很霑齐卒硬按式的西果关玉分剖整宙探应的方稚團I {餌从系绕的悔人撤与主负就儘号进htiu的比较环节开的,祐信号就功药方舟届过低递诵敕方框粘厨有柏中得变樹之阿的黄.杲一一函出"童主色出聚址的権启里与主反国情号* 二、传通曲酸方埜图等社龄基本规斛 传畏函故方劇帮就的蓬本規则扛丟2. II所示" 三、传递函數才框图简化的1殺步駁 〔1熾定系妊的单人蚩和輪出it如果陀用在爲場悔辅人批有寧今屈也锻好罰对毎一冲蒲人靳朮时虎设其电琳人?为茸)?矗伞暹行方根用柠简比*求稈捋自的倍if函載.对于具有寥个柿出虽的情况地晏分削进行变喪,束取各自的传速瓯歡, 铿)若方无5;叉的多个回區虑点朋先里后外的湮期,盏卜伺牝、直到简代凤一牛方植的形氏"若方貶用中电交艾的连播.印如下的方SL 方医一:若系就的件递留数方框忸同时隔览以下曲*亲杵. 箱件】,塾个黍址方幕国申只有1条用向谢進; 杀牛?帛局部反骨忖赂间徉在金共帥莅il瞬覽方框, 列町璟宜接用下列豎或求*L GO)? Ed = __________ 一竝通膨鮭沛好一 兀⑷1十E [毎一反既叵路用开环伶谨番竝之粗]"… 莒号内I 的箝苹是迖料决崔的:莊托加蛊*L对如号为相加时取负号T对反険册号为胡/时取正号* 方祐二:若夷疣的传迷丙敎方抿罔不那,埔足以卜两中徵怡则可通过相肌臥为支点笛阳旨耳诂驰则用系统馳鋪墟图代为钢稿勘上騎条杵的矗式我后电血式也3,]谓可" 方业m若系址的姣谨詞数方程團不同时幅足口上两个矩件,可通过斜却直、分支盘的前启移动導隆朋,将交戈涓琳為牝戒无变夏的多可盛殆式.然.弓由电到外世行0^5变快曲-^t-SM-1*方崔曲阳式点旨写出系挠的传谨岳总, H z. 3. L常眄憤遂函做才覆弟專硕竟理筑町 皋本要求、重点与难点 1、基本嗖■求 □J了舉数堂越野的电牛妊念.危燼运用廿力常、社学及专虫知识.弭写晁减系 愎、电两第曲a廿方瞅 (劭集豐¥谨副E的耳念、特.乩吉求传述甬?t的年盍、血jLSi[尢系收. w脛塔同忖祈决求果境附低進凿st. “xt餐各牛典厲耳节西蒂点,传遥所叛的基半■;式畏輕英峯数曲物日总丈「 越)了u僧谨西覽方相用朋俎眩&蘆泊罷翳覘据蕪曉毎分方艮蜡畅貳般阳暹苗飯 方框Sr^fttJIt,从而束!11罢藐挣遵!6数, mSfflEFSSE中就旬通西生增留比,开环传邀甬钦.坷环饕睾商亀甬毎义缺章底 岸宾干扰靠用下戊st的相艮緞栽榊綁特札 (门了鼻剧依也見歸胃;罠 二、本幸电点 ⑴翩轴轴师耳, {劭作谨虽数的簣念.特乳5求岳;廣星环节的传建巨SL 仃)传灌蔭牧方理00的殓制盘时北. 三、水#卓点 U)垂铠故分方樫时列可. <2)J?jiSSft方椎!E的卑朗殳斗医? W2 1就碑一?卜爾宜塵,取国立崔莪宦只帕&z方舟席渤的小车上?期耐列2.1》 祈示. 2-1反馈控制系统的传递函数 设用环弼覘在干捉梅用T的方框囲姻I I.L B! 2.4.1冊环翩{密干找帘用f的方程 (B 柜拮規柱累脱时叠tn黒湮』概输人与系娇的干衣相应独立战对展壕握菲用. 设皓AK;⑺弓俺的输出为X臥Jth千抚趴乃引胞的輸出为X*⑴.专干扰忖⑷为坪*隔可轉 系址社摘人柞刑下的传谊苗敦为 ,* 、XM ^GJC.d) 缶⑴=顽「乍丽翻而 忆4J) 今報人至⑴为irwn『聊耒址立十祝卄用下的惟谨函纹为 f s y -心$) _ 仏⑷ 山⑴ * 阴 ~ r+G^iX^f/T^(2,4.2) 崔匕式中.若丸干號所刖起的笛出鶴f O r 園此,尽韶购t前的过程中*干扰星不可戦的,碑 于殊酬系检腰貓颐音择适步也可以使泵址具有很蛍慎抚干扰能力。 从洼⑺4,1)和式(2XN:知*对于同一个園澤薬址.当输人的罩袪不同时.商向通道的传进函 数爲同点愦何路的好递甬数彳:同.系蜕特递甬塾山不同,但传迢西数的分母不璧,这说明了粽 传逋函鹅仙脱互对弔跻身的固有特也这牛特性与外界无丸说--凝冲开环離娩井不诗用. 2-5 梧取系然〔环节[俄用形或相同的数学樓矍克苗述的划理乘蜕f环节)祢为相怔果摊{环 节). 对于相镇島魏帀言冲直分方穆或柠递函収申占肖相同也賈対朝理■林为柜恆 i 由于義範特遣苗聶或曲井方观表汞的是系集雳功杏挣也而勻系址具低的翹理椅疏无关* tfltl 般數学模於表水的不同物理构成的系藐具有曜以的蛙杰特ft数学険塑的褂也性曼選行系贞榛曲 咸累址依JU)華碑“ ffl + M^IHKt^ASR.当小壬受囲外古&⑷年吊时』:枭崔片直位酉 陀喘木,试审以甬、为毕起」⑴为H人的茶蛻常力字方饥 馨劳爪牢左外力工⑷乍用下产生烦務上⑺ft虑啊想世林为 PS :*律准水平方向上的动力学方程古 ?(r) = M [:?'- m ^[rfJ}+ f5icjf(i>] 同tr以屐为0(兜对食■摂伍垂卫于集杯方闻上茁功力哮方科光宓斗山枫门n 丙丿电 希直?+卅器!咖刊} H(r) = c.Af 十MI)了⑺ + e仲(fks?s^/)—皿护“kin饌廿I mj&in^O = M斥 ⑴ + mi (/)CD£贼0 这是一牛基坯性擁分方覆辺.当X"较亦时』I 止I啊门农贰门cns^t) xti j 井略去*⑴的高抚咲I緡期下踐性运动黴井方握组 W<0 = (iV + irtjji (f)十制申⑴]ntfVCi)=皿坤G) 4- DIT <0 匪 立求曙博Mg C.D f t.M *曲詡“=—n(i) ?f 2-2 网第如I?{啊2■幼所示.SiSF?搭訥初始杀件为零?法求K件迪函農 U.fsJ/trxr).界&明谖网站是査璋效干氏f和尺£网于网给的卑廠. M ⑴如点电tftjn回胳电压足&O FP 甘g丄紗闵 ?j = “ i 如=?J^2 絵下来有冃种审it. 方症一:K立何个歡分方程.并洎徐屮阖旻覺咕小右 竭 ftjjd ..團&C 十打一 科瓦比〒.廐干町一竝+址= 再在尊初握翳忡下对上式两边进行[Jplifr变换再 伉fij 瓦+ & F而=飞武7: & +隔 K\ t 叫' iJW + o . _ / 方搖二:井剧对上述[8式在琴felJfr最带F进斤Ltphcr变膜有 瓦3 =石“川| +古打⑷ d&g = /J J3(5) H- Zj(r)R f JiB) J Lfr)十ft(O (s) —Jjit )A; t"朮周歼传連宙软口 mTtSEh”訂心》血门“,心厲+ 累闭环椿it 函敢『⑷朋3对福令简E=O .5 A'i (j)=n.J iBf.由標(删2.孟介碍 1 七冇 札 陷仁丁 ?中 3 _ ' Tf 心心 顾= i 才 FJ 二 T\ 1 Th r 4 J + KJC, 习題与解荟 1>I 什么处黴性耳玻:冥皐厦旻昭蜡性是什纟? ? E 是世UI 羯炜洋廿方牌st 述的專蜕就基機哎廉圧.战桂杀统的一个K 电黑的杵性韓 县它病足夕如豔理+ 12 2.2>S 示臣爭◎的就廿HAL. At 由年 1* 定律有 /(/)-細G) = MJ ”) 由于推动倍号皿⑴与輸人量的扉用点相同,故fl C(J>/Ni(i)=CCj)/fllrJ 联立井制除申何童直m 込⑷」血)得 ■. ~ E9 —r ^―”―= — V") 3:丿」 S H V 一用十■礼-”I 〔戸即果邯网培劳割?f 辛观城网卅的椿递函取为 求ia 耳传i! i5< (jWitOBh 健 K(5)=0 厦 Jfib)=tl.^时,BI(H 1 梟刃町必改JR 酗 2JMh 百图儡2.工別又可等皴为阿期2」."问此粽 r.\(r) ] 'i mr ______ 去西升_ 乔工71■匸丁〕d +】+ 隅 K(o a z 顾=R'+l^ 再i^RC^ /?/.禅今博邮幣瑕,用Jt 传递函散为 &也 1 R t I fA 心 K : 由甲这种方袪将杲轨彷制耳来"并求考處负捉菠应的虑响個此,RC 扣附.两个利站的串 IU ;雄尊效于I#系址* S12.3设巳划菇述某控體髯统的京动方鰹殂比F X|(d — r(O 一 lit) - f\}(t} ⑴ 『心)E &』应) f2) — JTj(J) — r 5 (t } ⑶ 丁圮⑴ f 八 丁丁-皿 ⑷ Xi(f) k x…(.t)一 札”:⑴ ⑸ S 蛉智 ⑹ 式中曲"为累竦的曾人址…⑺曲⑺为系境的扯动?22为累址的髡岀竟1『.")~孔⑺为 中何变乩届內屆为常価堆扔丁为时间n… 试绘胭虞控斟靈蛭的梓遽函就方框屋.井白此左框團求取阿斥恃违爾数亡右”肌“、 3叭⑷kCCr 讪血h 解(1)里制皋窥传总畐叛方框阳 分则对上述各斗圧初皓*件为零时取hpbw 变就再 Xjd = *t$)—广(『)f- m Xg n KM 心】 ⑻ .Vjt.U = Xi(i) "■ XjU) (9) cx&} = x 』,〉 ao) 天M2 Xjs] * (It? 札扎⑷ D 卡 4 'l 5 ) (li) 由式(7)■出iSlfc 輪人AGh 输SUCX 八宓it 动出xilMnf ;与即何吨廿工山)之何的九 囂如H 儡2.3』).師帚’ 其次,沿申问变財时佶号護动方向ft!克也)一或(11}谊过传逹苗敷庁隹甜福出它门之円& 共勺!t 动倚号之同的芷界,如IF :网 所不- 2.3. >) Enma-i-b) it 后.按式(]2)ws 屮间变甘烂册与去拎囲拭之间粉关甥,井在比“,RH 阿 盅直小悬弗上完Ift 主t£RiS10的常制.这样硬得到了寤览的完幕的棹ii 帽软的方世眉.凰用 ffl(^ 2.3-e) 分析三牛閉环件递函敎町知月于闭环策醜准人轉取註不吊系址対传谨苗熾不同,桓传 遥匡数的井母却完宅一尖说臥了杲黴柠it 西救的井偉艮唆了与外界方关的系生的固有将th 車实上^2.?也町以通討上逼方蚩.先画岀希蔬椿谨甬隸方展眛轴乩对方框田进行S1 化?从而《|出系统的传适甬前?有貝期搏養者可以试-试, 因2.4通过方雀!?I 的等故变按求取-钏静2.4」)所乐鬲址的恃谨函数门心讯⑷。 踊掲方歩宙族如罔〔洌243阳示的尊險变赛? airtf^JD 图{稱Z tc)^示的变養.依冈环焦連蛋證的采蚩徘案?t 曲犢谨函数为 G(t) fiO) y ____________ 亍 + GB 局 i + _______ 褊二 ~ w ~~?7~' G /O T M U - i +两而沖&T+G^iiw '丽站而 ________ ________________ Ggg? ______________________________ _ IT 石莎7而 HW 而匚丽药”而丙而丽丽 ffltfl 2-< ri 机械工程控制基础(第六版)公式 1.典型时间函数的拉氏变换以及拉氏变换的性质 22222 1 111[1];[()]1;[];[]![sin ];[cos ];[]at n n L L t L t L e S S S a w S n L wt L wt L t S w S W S δ+= ===-===++ ①延迟性质:[()].()as L f t a e F S --= ②复数域的位移性质:[()]()at L e f t F S a -=+ ③相似定理:1[()]()S L f at F a a = ④微分性质:()12'(1)[()][](0)(0)(0)n n n n n L f t S F S S f S f f -+-+-+=---- 当初始条件为零时:()[()][]n n L f t S F S = ⑤积分性质:(1)()1[()](0)F S L f t dt f S S -+= +? 初始条件为零时:() [()]F S L f t dt S =? ⑥初值定理:0 (0)lim ()lim ()s t f f t SF S + + →+∞ →==;⑦终值定理:0 lim ()lim ()t s f t SF S →+∞ →= 2.传递函数的典型环节及公式 ①比例环节K ;②积分环节 1S ;③微分环节S ;④惯性环节11TS +;⑤一阶微分环节1TS + ⑥振荡环节 22 121 T S TS ζ++;⑦二阶微分环节2221T S TS ζ++;⑧延时环节S e τ- ⑨开环传递函数()()H S G S ; 其中G(S)为向前通道传递函数,()H S 为反馈传递函数 闭环传递函数() ()1()() G S G S H S G S = +闭 ⑩梅逊公式n n n t T ∑?= ? ; 1231i j k i j k L L L ?=-∑+∑-∑+ 其中:T ——总传递函数 n t ——第n 条前向通路得传递函数; ?——信号流图的特征式 3.系统的瞬态响应及误差分析 ①一阶系统传递函数的标准式()1 K G S TS = +, K 一般取1 ②二阶系统传递函数的标准式222 1 ().2n n n w G S k S w S w ζ=++; K 一般取1 ③2 1d n w w ζ=-;其中ζ为阻尼比,n w 为无阻尼自然频率,d w 为阻尼自然频率 已知两个线性系统G(S)=2s+9/4s2+7s+2和G(S)=s+6/s2+7s+1,应用series函数进行系统的串联连接。 >> sys1=tf([2 9],[4 7 2]) >> sys2=tf([1 6],[1 7 1]) >> sys=series(sys1,sys2) sys = 2 s^2 + 21 s + 54 ---------------------------------- 4 s^4 + 3 5 s^3 + 55 s^2 + 21 s + 2 例1-4 已知两个线性系统G(S)=2s+9/4s2+7s+2和G(S)=s+6/s2+7s+1,应用parallel函数进行系统的并联连接。 >> sys1=tf([2 9],[4 7 2]) >> sys2=tf([1 6],[1 7 1]) >> sys=parallel(sys1,sys2) sys= 6 s^3 + 54 s^2 + 109 s + 21 ---------------------------------- 4 s^4 + 3 5 s^3 + 55 s^2 + 21 s + 2 例1-5 已知线性系统G(S)=2s+9/2s2+6s+5 应用feedback函数进行系统的单位正反馈和负反馈连接。 正反馈 >> sys1=tf([2 9],[2 6 5]) >> sys=feedback(sys1,1,1) sys = 2 s + 9 --------------- 2 s^2 + 4 s - 4 负反馈 >> sys1=tf([2 9],[2 6 5]) >> sys=feedback(sys1,1,-1) 1控制论的中心思想是什么? 答:通过信息的传递、加工处理和反馈来进行控制。 2机械工程控制论的研究对象及任务是什么? 答:对象:机械工程技术。任务:(1)当系统已定,并且输入知道时,求出系统的输出,并通过系统的输出来研究系统本身的有关问题,即系统分析;(2)当系统已定,且系统的输出也已给定,要确定系统的输入应使系统的输出尽可能符合给定的最佳要求,即系统的最优控制;(3)当输入已知,且输出也是给定时,确定系统应使输出尽可能符合给定的最佳要求,即最优设计;(4)当输入与输出均已知时,求出系统的结构与参数,即建立系统的数学模型,此及系统识别或系统辨识;(5)当系统已定,输出已知时,以识别输入或输入中的有关信息,此即滤液与预测。 3什么是信息与信息的传递?试举例说明。 答:一切能表达一定含义的信号、密码、情报和消息都是信息。例如机械系统中的应力、变形、温升、几何尺寸与精度等,表明了机械信号、密码、情报或消息。 所谓信息传递,指信息在系统传递过程中以某种关系动态地传递,或称转换。例如机械加工工艺系统,将工件尺寸做为信息,通过工艺过程的转换,加工前后工件尺寸分布有所变化,这样,研究机床加工精度问题,可以通过运用信息处理和理论和方法来进行。 4什么是反馈与反馈控制?试举例说明。 答:所谓信息的反馈,就是把一个系统的输出信号不断直接地或经过中间变换后全部或部分地返回,再输入到系统中去。如果反馈回去的讯号与原系统的输入讯号的方向相反(或相位差180度)则称之为“负反馈”;如果方向与相位相同,则称之为“正反馈”。例如人类最简单的活动,如走路或取物都利用了反馈的原理以保持正常的动作。人抬起腿每走一步路,腿的位置和速度的信息不断通过人眼及腿部皮肤及神经感觉反馈到大脑,从而保持正常的步法;人手取物时,手的位置与速度信息不断反馈到人脑以保持准确而适当地抓住待取之物。5日常生活中的许多闭环系统与开环系统,试举例说明。 答:开环系统:系统的输出量对系统无控制作用,或者说系统中无反馈回路。例如洗衣机,它按洗衣、清水、去水、干衣的顺序进行工作,无需对输出信号即衣服的清洁程度进行测量; 闭环系统:系统的输出量对系统有控制作用,或者说系统中存在反馈回路。例如液面调节器和以工作台的位置做为系统输出,通过检测装置进行测量,并将该信号反馈,进行控制工作台运动位置的CNC机床的进给系统。 6何谓控制系统?按是否存在反馈分哪些? 答:控制系统指系统的输出,能按照要求的参考输出或控制输入进行调节。按是否存在反馈分为2种,即开环控制系统和闭环控制系统。 7拉氏变换的定义是什么? 答:拉氏变换是分析研究线性动态系统的有力工具,将时域的微分方程变换为复数域的代数方程。 8什么是数学模型? 答:数学模型是系统动态特性的数学表达式。建立数学模型是分析、研究一个动态特性的前提。 9传递函数的定义及特点是什么? 答:定义:线性定常系统的传递函数,是初始条件为零,系统输出的拉氏变换比输入的拉氏变换。 特点:1)传递函数反应系统本身的动态特性,只与系统本身的参数有关,与外界输入无关;2)对于物理可实现系统,传递函数分母中的s的阶次n必不小于分子中的s的阶次m,即n大于等于m,因为实现的物理系统总是存在惯性,输出不会超前于输入;3 《机械工程控制基础》实验指导书 工程与技术系 二O一一年四月 目录 实验一时间特性的计算机求解 (1) 实验二频率特性计算机求解 (3) 实验三系统稳定性分析 (5) 实验四系统稳态误差的计算 (7) 实验一 时间特性的计算机求解 一、 实验目的 1. 使用matlab 程序语言描述一阶二阶系统的时间响应。 2. 观察系统在单位阶跃信号、单位脉冲信号作用下的输出,并分析其动态性能。 二、 实验设备 计算机及matlab 仿真软件 三、 实验的内容 1. 使用matlab 程序语言描述一阶系统单位阶跃型号下的的时间响应 (1)程序语言: num=[01......,b b b m m -]; den=[01......,a a a n n -]; step(num,den) (2)求解实例: 求解一阶系统1 21 )(+=s s G 单位阶跃响应 num=[1]; den=[2 1]; step(num,den) 响应曲线如图所示: 2. 使用matlab 程序语言描述二阶系统单位阶跃型号下的的时间响应 (1)程序语言: num=[2 n ω]; den=[ 22 12)n n ξωω(]; step(num,den) (2)求解实例: 求解二阶系统4 6.14 )(2 ++=s s s G 单位阶跃响应 num=[4]; den=[1 1.6 4]; step(num,den) 响应曲线如图所示: 四、实验报告要求 使用matlab 程序语言下列一阶和二阶系统单位阶跃信号下的的时间响应,并确定影响系统快速性和稳定性的性能指标 (1)1 31 )(+= s s G (2)1000 5.341000 )(2 ++=s s s G 1.何谓控制系统,开环系统与闭环系统有哪些区别? 答:控制系统是指系统的输出,能按照要求的参考输入或控制输入进行调节的。开环系统构造简单,不存在不稳定问题、输出量不用测量;闭环系统有反馈、控制精度高、结构复杂、设计时需要校核稳定性。 2.什么叫相位裕量?什么叫幅值裕量? 答:相位裕量是指在乃奎斯特图上,从原点到乃奎斯特图与单位圆的交点连一直线,该直线与负实轴的夹角。幅值裕量是指在乃奎斯特图上,乃奎斯特图与负实轴交点处幅值的倒数。 3.试写出PID控制器的传递函数? 答:G C(s)=K P+K Ds+K I/s 4,什么叫校正(或补偿)? 答:所谓校正(或称补偿),就是指在系统中增加新的环节或改变某些参数,以改善系统性能的方法。 5.请简述顺馈校正的特点 答:顺馈校正的特点是在干扰引起误差之前就对它进行近似补偿,以便及时消除干扰的影响。6.传函的主要特点有哪些? 答:(1)传递函数反映系统本身的动态特性,只与本身参数和结构有关,与外界输入无关;(2)对于物理可实现系统,传递函数分母中s的阶数必不少于分子中s的阶数;(3)传递函数不说明系统的物理结构,不同的物理结构系统,只要他们的动态特性相同,其传递函数相同。 7.设系统的特征方程式为4s4+6s3+5s2+3s+6=0,试判断系统系统的稳定性。 答:各项系数为正,且不为零,满足稳定的必要条件。列出劳斯数列: s4 4 s3 6 3 s2 3 6 s1 -25/3 s0 6 所以第一列有符号变化,该系统不稳定。 8.机械控制工程主要研究并解决的问题是什 么? 答:(1)当系统已定,并且输入知道时,求出系统的输出(响应),并通过输出来研究系统本身的有关问题,即系统分析。(2)当系统已定,且系统的输出也已给定,要确定系统的输入应使输出尽可能符合给定的最佳要求,即系统的最佳控制。(3)当输入已知,且输出也是给定时,确定系统应使得输出金肯符合给定的最佳要求,此即最优设计。(4)当系统的输入与输出均已知时,求出系统的结构与参数,即建立系统的数学模型,此即系统识别或系统辨识。(5)当系统已定,输出已知时,以识别输入或输入中得有关信息,此即滤液与预测。 9,在系统校正中,常用的性能指标有哪些?答:(1)在系统校正中,常用的性能指标按其类型可分为:(1)时域性能指标,它包括瞬态性能指标(即上升时间、峰值时间、最大超调量、调整时间等)和稳态性能指标(即稳态误差)。(2)频域性能指标,它包括相位裕量、幅值裕量、频宽等。 10.求拉氏反变换的方法有哪些? 答:(1)查表法;(2)有理函数法;(3)部分分式法。 11.简述二阶欠阻尼系数a,w n与性能指标M p(超调量)、t s(调整时间)的关系。 答:二阶欠阻尼系统若a不变,增大或减小w(n),则超调量t(p)不变,调整时间t(s)减小(或增大);若t(n)不变,增大(或减小)a,则超调量M(p)减小(或增大),调整时间t(s)减小(增大) 12.简述串联超前校正环节的作用。 答:串联超前校正环节的作用是:串联超前校正环节增大了相位裕量,加大了宽带,这就意味着提高了系统的相对稳定性,加快了系统的响应速度,使过度过程得到显著改善。但由于系统的增益和型次都未变化,所以稳态精度变化不大。13.传递函数的典型环节主要有哪几种? 答:(1)比例环节K;(2)积分环节1/s(3)微分环节s(4)惯性环节1/(Ts+1)(5)一阶微分环节Ts+1(6)震荡环节1/(T2s2+2aTs+1)(7)二阶微分环节T2s2+2aTs+1(8)延时环节e-ts 14.终值定理的应用条件是什么? 答:若函数f(t)及其一阶导数都是可拉氏变换的,并且除在原点处唯一的极点外,sF(s)在包括含jw轴的右半s平面内是解析的,这就意味着 当t趋近与无穷时f(t)趋于一个确定的值,则 函数f(t)的终值为limf(t)=limF(s)。 15.什么叫系统分析? 答:当系统已定,并且输入知道时,求出系统的 输出(响应),并且通过输出来研究系统本身的有 关问题,即系统分析。 16.对数坐标图的主要优点有哪些? 答:(1)可以将幅值相乘转化为幅值相加,便于 绘制多个环节串联组成的系统的对数频率特性 图。(2)可采用渐近线近似的作用方法绘制对数 幅频图,简单方便,尤其是在控制系统设计、校 正及系统辨识等方面,优点更为突出。(3)对数 分度有效地扩展了频率范围,尤其是低频段的扩 展,对工程系统设计具有重要意义。 17.简述拉氏反变换中部分分式法的步骤。 答:部分分式法是通过代数运算,先将一个复杂 的象限函数化为数个简单的部分分式之和,再分 别求出各个分式的原函数,总的原函数即可求得。 18.请写出超前校正装置的传递函数,如果将它 用于串联校正,可以改善系统什么性能? 答:G c(s)=1/a乘aTs+1/(Ts+1),a>1可增加相位 裕量,调整频带宽度。 19.影响系统稳态误差的因素有哪些? 答:影响系统稳态误差的因素有系统的类型、开 环增益和输入信号。 20.已知系统的调节器为 G c(s)=(T1s+1)(T2s+1)/s,其中T1、T2>0,问是否 可以称其为PID调节器,请说明理由。 答:可以称其为PID调节器。 G c(s)=(T1+T2)+T1T2S+1/S .G c(s)由比例部分 (T1+T2) 、微分部分T1T2s及积分部分1/s相加而 成。 21.什么叫机械系统的动柔度和动刚度? 答:若机械系统的输入为力,输出为位移(变形), 则机械系统的频率特性就是机械系统的动柔度; 机械系统的频率特性的倒数就是机械系统的动刚 度。 22.什么叫机械系统的基本要求? 答:对控制系统的基本要求有系统的稳定性、响 应的快速性和响应的准确性等,其中系统的稳定 性是控制系统工作的首要条件。在参数已知的情 况下分析和评定系统的稳定性、快速性和准确性。 23.设开环传递函数Gs=100/s+10s+50,试说明开 环系统频率特性极坐标图的起点和终点。 答:G(s)=0.2/(0.1s+1)(0.02s+1) G(jw)=0.2/(j0.1w+1)(j0.02w+1) G(jw)极坐标图起点:(0.2.j0) G(jw)极坐标图终点(0,j0) 29.什么是数学模型? 答:数学模型是系统动态特性的数学表达式。建 立数学模型是分析、研究一个动态特性的前提。 一个合理的数学模型应以最简化的形式,准确地 描述系统的动态特性。 30.线性系统的主要特征是什么? 答:若系统的数学模型表达式是线性的,则这种 系统就是线性系统。线性系统最重要的特征是可 以运用叠加原理。所谓叠加原理,就是系统在几 个外加作用下所产生的响应,等于各个外加作用 单独作用的响应之和。 31.简述系统时间响应的概念。 答:机械工程系统在外加作用激励下,其输出量 随时间变化的函数关系称之为系统的时间响应, 通过时间响应的分析可以揭示系统本事的动态特 性。 32.在频率特性的图形表示方法中,常用的方法 有哪几种? 答:(1)对数坐标图或称伯德图(2)极坐标图或 称乃奎斯特图(3)对数幅-相图。 33.判断定常系统是否稳定的方法有哪几种? 答:劳斯判据;胡尔维茨判据;乃奎斯特稳定性 判据;根轨迹法。 34.反馈校正与串联校正相比,所具有的优点是 哪些? 答:反馈校正比串联校正更有其突出的优点:利 用反馈能有效地改变被包围环节的动态结构参 数,甚至在一定条件下能用反馈校正完全取代包 围环节,从而大大减弱这部分环节由于特性参数 变化及各种干扰给系统带来的不利影响。 35.什么是反馈(包括正反馈和负反馈)? 答:所谓信息的反馈,就是把一个系统的输出信 号不断直接地或经过中间变换后全部或部分地返 回,再输入到系统中去。如果反馈回去的讯号(或 作用)与原系统的输入讯号(或作用)的方向相 反(或相位相差180度)则称之为“负反馈”;如 果方向或相位相同,则称之为“正反馈”。 36.劳斯-胡尔维茨稳定性判据的根据是什么? 答:利用特征方程式的根与系统的代数关系,由 特征方程中的已知系数间接判断出方程的根是否 具有负实部,从而判断系统是否稳定。 37.采用何种方式可以同时减少或消除控制输入 和干扰作用下的稳态误差? 答:在干扰作用点至系统输入口的前通道中,提 高增益和设置积分环节。 38.简述拉氏变换的线性性质。 答:拉氏变换是一个线性变换,若有常数KK,函 数f(t1),f(t2),则 L[K1f1(t)+K2f2(t)]=K1L[f1(t)]+K2L[f2(t)]=K1F1(s )+K2F2(s) 39.系统的频域性能指标有哪些? 答:相位裕量、幅值裕量、截止裕量及频宽、谐 振频率及谐振峰值。 40.频率特性和传递函数的关系是什么? 答:若系统的传递函数为G(s),则相应系统的 频率特性为G(jw),即将传递函数中得s用jw 代替 40.请写出滞后校正装置的传递函数,如果将它 用于串联校正,可以改善系统什么性能? 答:G(s)=Ts+1/9aTs+1),提高系统的稳态精度。 41.什么是系统频率特性的截止频率? 答:是指系统闭环频率特性的幅值下降到其零频 率幅值以下3dB时的频率。 42.典型二阶系统(当0 2.1列写图2.1所示系统的微分方程。f(t)为输入,y 2(t)为输出 图2.2 2.3无源电网络如图2.3所示,电压u i(t), U2(t)分别为输入量和输出量。绘传递函数方框图,并求传递函数 2.4.已知机电系统如图2.4所示。求绘 制系统传递函数方框图 G(s) = X(s)/E(s) 提示:假定电磁线圈的反电势 线圈电流i 2对衔铁M产生 图2.3 并求传送函数 的力F o K2i2 图 2.1 2.2求图2.2所示无源电网络的传递函数,图中电压U i,U2分别是输入量和输出 3.1 一个系统的传递函数为 2.4 图 采用图1所示方法使新系统的过渡过程时间减小为原来的 0.1倍,放大系数不变, 求K)和K 的值 跃响应曲线如图2所示,图中t s1、t s2是曲线①、 ②的过渡过程时间 t p1、t p2、t p3是曲线①、 ②、③的峰值时间。在同一一 s 平面上画出3个闭环 G(s) 10 0.2s 1 3.2 3个二阶系统得传递函数均可写成G(s) S 2 2 它们的单位阶 n S 极点的相对位置 图2 3.3系统框图如图3所示,要求系统最大超调Mp= 16.3 %,峰值时间t p=ls .求 K 、 心。 图3 3.4控制系统如图4所示。 ⑴ 当K f = 0、K A = 10时,试确定系统的阻尼比、 无阻尼固有频率和在单位斜 坡输入作用下系统的稳态误差。 (2) 若要求系统阻尼比为0.6、K A = 10,试确定K f 值和在单位斜坡输入作用下系 统的稳态误差。 (3) 若在单位斜坡输入作用下,要求保持阻尼比为0.6,稳态误差为0.2,确定 K f 、 K A O 图 4 机械工程控制基础知识点 ●控制论的中心思想:它抓住一切通讯和控制系统所共有的特点,站在一个更概括的理论高度揭示了它们的共同本质,即通过信息的传递、加工处理和反馈来进行控制。 机械工程控制论:是研究机械工程技术为对象的控制论问题。(研究系统及其输入输出三者的动态关系)。 机械控制工程主要研究并解决的问题:(1)当系统已定,并且输入知道时,求出系统的输出(响应),并通过输出来研究系统本身的有关问题,即系统分析。(2)当系统已定,且系统的输出也已给定,要确定系统的输入应使输出尽可能符合给定的最佳要求,即系统的最佳控制。(3)当输入已知,且输出也是给定时,确定系统应使得输出金肯符合给定的最佳要求,此即●最优设计。(4)当系统的输入与输出均已知时,求出系统的结构与参数,即建立系统的数学模型,此即系统识别或系统辨识。(5)当系统已定,输出已知时,以识别输入或输入中得有关信息,此即滤液与预测。 ●信息:一切能表达一定含义的信号、密码、情报和消息。 信息传递/转换:是指信息在系统及过程中以某种关系动态地传递。 信息的反馈:是把一个系统的输出信号不断直接地或经过中间变换后全部或部分地返回,再输入到系统中去。如果反馈回去的讯号(或作用)与原系统的输入讯号(或作用)的方向相反(或相位相差180度)则称之为“负反馈”;如果方向或相位相同,则称之为“正反馈”。 ●系统:是指完成一定任务的一些部件的组合。 控制系统:是指系统的输出,能按照要求的参考输入或控制输入进行调节的。 开环系统:系统的输出量对系统无控制作用,或者说系统中无反馈回路的。闭环系统:系统的输出量对系统有控制作用,或者说,系统中存在反馈的回路。 机械工程控制基础课程教学大纲 一、课程名称 机械工程控制基础Cybernetics Foundation for Mechanical Engineering 学时:40 二、授课对象 机械类各专业 三、先修课程 复变函数、积分变换 四、课程的性质、目标与任务 本课程侧重原理,其内容密切结合工程实际,是一门专业基础课。它是控制论为理论基础,以机械工程系统为研究对象的广义系统动力学;同时,它又是一种方法论。学习本课程的目的在于使学生能以动力学的观点而不是静态观点去看待一个机械工程系统;从整体的而不是分离的角度,从整个系统中的信息之传递、转换和反馈等角度来分析系统的动态行为;能结合工程实际,应用经典控制论中的基本概念和基本方法来分析、研究和解决其中的问题。这包括两个方面:①对机电系统中存在的问题能够以控制论的观点和思维方法进行科学分析,以找出问题的本质和有效的解决方法;②如何控制一个机电系统,使之按预定的规律运动,以达到预定的技术经济指标,为实现最佳控制打下基础。 五、课程的基本要求 1.对于建立机电系统的数学模型,有关数学工具(如Laplace变换等)的应用,传递函数与方框图的求取、简化与演算等,应有清楚的基本概念并能熟练掌握。 2.对于典型系统的时域和频域特性,应有清楚的基本概念并能熟练掌握。 3.掌握判别线性系统稳定性的基本概念和常用判据。 4.对于线性系统的性能指标有较全面的认识,了解并掌握系统的综合与校正的常用方法。 5.了解线性离散系统和非线性系统的基本概念和基本的分析方法。 6.对系统辩识问题应建立基本概念。 六、教学内容与学时分配 授课学时为40学时,实验8学时;复习、做习题、写实验报告等课外学时为50学时以上。 机械工程控制基础模拟卷 一、选择题 1. 控制工程主要研究并解决的问题之一是( D ) A 、系统已定,输入不确定,求系统的输出 B 、系统已定,输入已知,求系统的输出(响应) C 、系统已定,规定系统的输入 D 、系统不定,输入已知,求系统的输出(响应) 2. 已知机械系统的传递函数为,44)(2++= s s s G 则系统的阻尼比、增益和放大系数是(B )。 A. 0.25, 1, 1 B. 0.5,4,1 C. 0.25,4,4 D. 0.5,1,4 3. 弹簧-质量-阻尼系统的传递函数为1/(ms 2+cs+k ),则系统的无阻固有频率ωn 为(A ) A m k B k m C m c D c m 4. 对于定常控制系统来说(A ) A 、 表达系统的微分方程各项系数不随时间改变 B 、 微分方程的各阶微分项的幂为1 C 、 不能用微分方程表示 D 、 系统总是稳定的 5.微分环节反映了输入的变化趋势,可以应用于( A )。 A. 增加系统阻尼 B. 减小系统阻尼 C. 减弱噪声的作用 D. 减小稳态误差 6. 系统方块图如图所示,其开环传递函数G k (S)是(A ) A 5S/(3S+1) B (3S+1)/5S C 1/[5S(3S+1)] D 5/[S(3S+1)] 7.系统的输出误差为e(t),其稳态误差为:( A ) A )(lim 10s sE s → B )(lim 0s E s → C ) ( lim s E s∞ →D ) ( lim 1 s sE s∞ → 8. 比例环节的对数幅频特性曲线是一条(A )。 A.水平线 B.垂直线 C.斜率为-20db/dec的直线 D.斜率为-10db/dec的直线 9. 所谓校正(又称补偿)是指(B ) A、加入PID校正器 B、在系统中增加新的环节或改变某些参数 C、使系统稳定 D、使用劳斯判据 10. PI校正属于下面哪种校正方法:(B ) A相位超前校正 B 相位滞后校正 C相位滞后超前校正D无法确定 二、填空题 1.设计控制系统基于以下几个要求:稳定性、精准性和快速性。 2. 传递函数可定义为:在外界输入作用前,输入、输出的初始条件为零时,线性定常系统的输出量的拉氏变换与输入量的拉氏变换之比。 3. 当阻尼比ξ大于0小于1时,系统称为欠阴尼系统,当阻尼比ξ=0时,系统称为无阻尼系统,当阻尼比ξ=1时,系统称为临介阻尼系统,当阻尼比ξ大于1时系统称为过阻尼系统。 三、计算题 1. 列出如右图所示的系统的微分方程,并推出传递函数。 《机械工程控制基础》 实验报告 班级: 学号: 姓名: 一、实验目的: (1)掌握MATLAB 和SIUMLINK 在控制工程领域中的基本应用。 (2)了解一阶系统和二阶系统的对典型输入的响应波形和系统的频率特性。 二、实验设备及仪器: 计算机,MATLAB6软件一套; 三、实验内容: 1、以MATLAB 命令方式,绘制出下列传递函数的单位阶跃响应波形和BODE 和Nyuist 图。 (1)G1=1/s 单位阶跃响应波形图 BODE 图 Nyquist 图 (2)G2=1/(0.5s+1) 单位阶跃响应波形图 BODE 图 Nyquist图 (3)G3=s 因为传递函数中分母s的阶数高于分子s阶数,所以没有单位阶跃波形图。 BODE图Nyquist图 (4)G4=0.5 s + 1 因为传递函数中分母s的阶数高于分子s阶数,所以没有单位阶跃波形图。 BODE图Nyquist图 (5)G5=1/(s^2 + 1.4 s + 1) 单位阶跃响应波形图BODE图 Nyquist图 (6)g6=(0.5 s + 1)/(s^2 + 1.4 s + 1) 单位阶跃响应波形图BODE图 Nyquist图 2、利用SIMULINK对下图所示系统建立控制系统模型,并对输入为单位阶跃信号和正弦信号时进行系统输出仿真。 单位阶跃: 正弦信号: 3、利用MATLAB,求出下边传递函数的单位阶跃响应,完成下表并总结规律。 传递函数:G(s)=1/(τs+l) τ=0.1 τ=1 τ=5 τ=10 τ=50 规律总结:惯性环节的输入响应不能立即稳定,存在时间上的延迟,时间常数愈大惯性愈大,延迟时间愈长,时间常数表征该环节的惯性,同时上升时间与时间常数成正比。 第一章绪论 1、控制论的中心思想、三要素和研究对象。 中心思想:通过信息的传递、加工处理和反馈来进行控制。 三要素:信息、反馈与控制。 研究对象:研究控制系统及其输入、输出三者之间的动态关系。 2、反馈、偏差及反馈控制原理。 反馈:系统的输出信号部分或全部地返回到输入端并共同作用于系统的过程称为反馈。 偏差:输出信号与反馈信号之差。 反馈控制原理:检测偏差,并纠正偏差的原理。 3、反馈控制系统的基本组成。 控制部分:给定环节、比较环节、放大运算环节、执行环节、反馈(测量)环节 被控对象 基本变量:被控制量、给定量(希望值)、控制量、扰动量(干扰) 4、控制系统的分类 1)按反馈的情况分类 a、开环控制系统:当系统的输出量对系统没有控制作用,即系统没有反馈回路时,该系 统称开环控制系统。 特点:结构简单,不存在稳定性问题,抗干扰性能差,控制精度低。 b、闭环控制系统:当系统的输出量对系统有控制作用时,即系统存在反馈回路时,该系 统称闭环控制系统。 特点:抗干扰性能强,控制精度高,存在稳定性问题,设计和构建较困难,成本高。 2)按输出的变化规律分类 自动调节系统 随动系统 程序控制系统 3)其他分类 线性控制系统连续控制系统 非线性控制系统离散控制系统 5、对控制系统的基本要求 1)系统的稳定性:首要条件 是指动态过程的振荡倾向和系统能够恢复平衡状态的能力。 2)系统响应的快速性 是指当系统输出量与给定的输出量之间产生偏差时,消除这种偏差的能力。 3)系统响应的准确性(静态精度) 是指在调整过程结束后输出量与给定的输入量之间的偏差大小。 第二章系统的数学模型 1、系统的数学模型:描述系统、输入、输出三者之间动态关系的数学表达式。 时域的数学模型:微分方程;时域描述输入、输出之间的关系。→单位脉冲响应函数复数域的数学模型:传递函数;复数域描述输入、输出之间的关系。 频域的数学模型:频率特性;频域描述输入、输出之间的关系。 2、线性系统与非线性系统 线性系统:可以用线性方程描述的系统。 重要特性是具有叠加原理。 3、系统微分方程的列写 4、非线性系统的线性化 5、传递函数的概念: 1)定义:初始状态为零时,输出的拉式变换与输入的拉氏变换之比。即 G(s) =Y(s)/X(s) 2)特点: (a)传递函数反映系统固有特性,与外界无关。 (b)传递函数的量纲取决于输入输出的性质,同性质的物理量无量纲;不同性质的物理量有量纲,为两者的比值。 (c)不同的物理系统可以有相似的传递函数,传递函数不反映系统的真实的物理结构。(d)传递函数的分母为系统的特征多项式,令分母等于零为系统的特征方程,其解为特征根。 (e)传递函数与单位脉冲响应函数互为拉氏变换与拉氏反变换的关系。 机械工程控制基础实验报告 班级:072104-22 姓名:李威 学号:20101003439 实验一 (一) 利用Matlab 进行时域分析: (1) 用Matlab 求系统时间响应: 设系统的传递函数为 G(s)= 50 )501(05.050 2 +++s s τ 求该系统在时间常数τ不同取值时的单位脉冲响应、单位阶跃响应。 令τ=0、τ=0.0125、τ=0.025,应用impulse 函数,可以得到系统单位脉冲响应; 应用step 函数,同样可以得到系统单位阶跃响应。文本中tao 即为τ,所用Matlab 文本及响应曲线如下: 00.2 0.40.60.8 -10 -50510 152025 t(sec) x (t ) 00.2 0.40.60.8 0.2 0.4 0.6 0.8 1 1.2 1.4 t(sec) x (t ) (1)单位脉冲响应曲线 (2)单位阶跃响应曲线 t=[0:0.01:0.8] % nG=[50]; tao=0;dG=[0.05 1+50*tao 50];G1=tf(nG ,dG); tao=0.0125;dG=[0.05 1+50*tao 50];G2=tf(nG ,dG); tao=0.025;dG=[0.05 1+50*tao 50];G3=tf(nG ,dG); % [y1,T]=impulse(G1,t);[y1a,T]=step(G1,t); [y2,T]=impulse(G2,t);[y2a,T]=step(G2,t); [y3,T]=impulse(G3,t);[y3a,T]=step(G3,t); 机械控制工程基础 一、填空题 1. 线性控制系统最重要的特性是可以应用 叠加 原理,而非线性控制系统则不能。 2.反馈控制系统是根据输入量和 反馈量 的偏差进行调节的控制系统。 3. 根据自动控制系统是否设有反馈环节来分类,控制系统可分为__开环_控制系统、_闭环__控制系统。 4. 根据系统输入量变化的规律,控制系统可分为 恒值 控制系统、 随动 控制系统和 程序控制系统。 5. 如果在系统中只有离散信号而没有连续信号,则称此系统为离散(数字)控制系统,其输入、输出关系常用差分方程来描述。 6. 根据控制系统元件的特性,控制系统可分为__线性__ 控制系统、 非线性_控制系统。 7. 线性控制系统其输出量与输入量间的关系可以用 线性微分 方程来描述。 8. 对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、 快速性 和准确性。 9. 在控制工程基础课程中描述系统的数学模型有微分方程 、传递函数等。 10. 传递函数的定义是对于线性定常系统,在零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。 11. 传递函数的组成与输入、输出信号无关,仅仅决定于 系统本身的结构和参数 ,并且只适于零初始条件下的 线性定常 系统。 12. 瞬态响应是系统受到外加作用激励后,从初始状态到最终稳定状态的响应过程。 13. 脉冲信号可以用来反映系统的抗冲击能力。 14. 单位斜坡函数t 的拉氏变换为 2 1 s 。 15. 单位阶跃信号的拉氏变换是 1/s 。 16.在单位斜坡输入信号作用下,0型系统的稳态误差e ss = ∞ 。 17. I 型系统G s K s s ()() =+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下,稳态 误差为 ∞ 。 18. 一阶系统11 Ts +的单位阶跃响应的表达是T t e --1。 控制基础 填空题(每空1分,共20分) 1. 线性控制系统最重要的特性是可以应用___叠加__原理,而非线性控制系统则不能。 2.反馈控制系统是根据输入量和__反馈量__的偏差进行调节的控制系统。 3.在单位斜坡输入信号作用下,0型系统的稳态误差e ss =__∞___。 4.当且仅当闭环控制系统特征方程的所有根的实部都是__负数__时,系统是稳定的。 5.方框图中环节的基本连接方式有串联连接、并联连接和__反馈 _连接。 6.线性定常系统的传递函数,是在_ 初始条件为零___时,系统输出信号的拉氏变换与输入信号的拉氏变换的比。 7.函数te -at 的拉氏变换为 2 )(1 a s +。 8.线性定常系统在正弦信号输入时,稳态输出与输入的相位移随频率而变化的函数关系称为__相频特性__。 9.积分环节的对数幅频特性曲线是一条直线,直线的斜率为__-20__dB /dec 。 10.二阶系统的阻尼比ξ为 _ 0_ 时,响应曲线为等幅振荡。 11.在单位斜坡输入信号作用下,Ⅱ型系统的稳态误差e ss =__0__。 12.0型系统对数幅频特性低频段渐近线的斜率为___0___dB/dec ,高度为20lgKp 。 13.单位斜坡函数t 的拉氏变换为 2 1s 。 14. 根据系统输入量变化的规律,控制系统可分为__恒值__控制系统、 ___随动___ 控制系统和程序控制系统。 15. 对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、 __快速性__和准确性。 16. 系统的传递函数完全由系统的结构和参数决定,与__输入量、扰 动量__的形式无关。 17. 决定二阶系统动态性能的两个重要参数是阻尼系数ξ和_无阻尼 自然振荡频率w n 。 18. 设系统的频率特性G(j ω)=R(ω)+jI(ω),则幅频特性|G(j ω)|= )()(22w I w R +。 19. 分析稳态误差时,将系统分为0型系统、I 型系统、II 型系统…,这是按开环传递函数的__积分__环节数来分类的。 20. 线性系统稳定的充分必要条件是它的特征方程式的所有根均在复平面的___左___部分。 21.ω从0变化到+∞时,惯性环节的频率特性极坐标图在____第四 ____象限,形状为___半___圆。 22. 用频域法分析控制系统时,最常用的典型输入信号是_正弦函数_。 23.二阶衰减振荡系统的阻尼比ξ的范围为10<<ξ。 24.G(s)= 1 +Ts K 的环节称为___惯性__环节。 25.系统输出量的实际值与_输出量的希望值__之间的偏差称为误差。 26.线性控制系统其输出量与输入量间的关系可以用___线性微分__ 机械工程控制基础大作 业(1) 悬架是汽车的车架(或承载式车身)与车桥(或车轮)之间的一切传力连接装置的总称,其作用是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并减少由此引起的震动,以保证汽车能平顺地行驶。 1.悬架系统的数学模型 (1) 从研究车辆行驶平顺性的目的出发,建立图1所示的数学模 型。在此主要考虑对行驶平顺性影响最大的垂直震动。 建立方程 )x ()(x m 21211122x c x x k x m -+-+= 传递函数 k cs k cs s m s x s + + + + = 2 2 2 1 1 s m ) ( ) ( x 悬架系统传递函数框图 (2) ) ( ) ( )s( 2 1 c b 2 1 2 2 2 1 b 2 1 K cs s m K K K K K cs s m K cs s m K K K K G b + + + + + + + = 2.利用Matlab对悬架系统进行分析 2.1利用Matlab分析时间响应 (1)当Kb分别为5、10、20时,系统在单位阶跃输入作用下的响应的程序和图像 t = [0:0.01:10]; nG=[0.5 1 10];dG=[4 5 20]; G1=tf(nG,dG); nG=[1 2 20];dG=[5 9 40]; G2=tf(nG,dG); nG=[2 4 40];dG=[6 17 80]; G3=tf(nG,dG); [y1,T]=impulse(G1,t);[y1a,T]=step(G1,t); [y2,T]=impulse(G2,t);[y2a,T]=step(G2,t); [y3,T]=impulse(G3,t);[y3a,T]=step(G3,t); subplot(121),plot(T,y1,'--',T,y2,'-',T,y3,'-') legend('kb=5','kb=10','kb=20') xlabel('t(sec)'),ylabel('x(t)');grid on; subplot(122),plot(T,y1a,'--',T,y2a,'-',T,y3a,'-') legend('kb=5','kb=10','kb=20') xlabel('t(sec)'),ylabel('x(t)');grid on; 《机械工程控制基础》试卷(A 卷) 一、填空题(每空1分,共20分) 1、对控制系统的基本要求是 系统的稳定性 、 响应的快速性 、 响应的准确性 。 2、已知f(t)=t+1,对其进行拉氏变换L[f(t)]= 1/s 2+1/s 或者(1+s )/s 2 。 3、二阶系统的极点分别为s 1=?0.5,s 2=?4,系统增益为2,则其传递函数G(S)= 2/(s+0.5)(s+_4) 4、零频幅值A(0)表示当频率ω接近于零时,闭 环系统输出的幅值与输入幅值之比。 5、工程控制论实质上是研究工程技术中广义系统的动力学问题,机械工程控制就是研究系统、输入、输出三者之间的动态关系。 6、系统的频率特性求取有三种方法:根据系统响应求取、用试验方法求取和将传递函数中的s 换为 jw 来求取。 8、微分环节的控制作用主要有 使输出提前 、 增加系统的阻尼 、 强化噪声 。 9、二阶系统的传递函数为2 22 2)(n n n s s s G ωξωω++=,其中n ω为系统的 无阻尼固有频率 ,当10<<ξ时为 欠阻尼 系统。在阻尼比ξ<0.707时,幅频特性出现峰值,称谐振峰值,此时 的频率称谐振频率ωr =221ξω-n 。 10、一般称能够用相同形式的数学模型来描述的物理系统成为相似系统。 11、对自动控制系统按照输出变化规律分为自动调节系统、随动系统、程序控制系统。 12、对积分环节而言,其相频特性∠G(jw)=-900。 二、名词解释(每个4分,共20分) 1、闭环系统:当一个系统以所需的方框图表示而存在反馈回路时,称之为闭环系统。 2、系统稳定性:指系统在干扰作用下偏离平衡位置,当干扰撤除后,系统自动回到平衡位置的能力。 3、频率特性:对于线性定常系统,若输入为谐波信号,那么稳态输出一定是同频率的谐波信号,输出输入的幅值之比及输出输入相位之差统称为频率特性。 4、传递函数:在外界作用系统前,输入、输出的初始条件为零时,线性定常系统、环节或元件的输出x 0(t)的Laplace 变换X 0(S)与输入x i (t)的Laplace 变换X i (S)之比,称为该系统、环节或元件的传递函数G(S) 5、系统:由相互联系、相互作用的若干部分构成,而且有一定的目的或一定运动规律的一个整体,称为系统。 三、 分析题(每题6分,共12分) 1、分析人骑自行车的过程中,如何利用信息的传输,并利用信息的反馈,以达到自行车平衡的。(要求绘出原理方框图) 分析人骑自行车的过程中,如何利用信息的传输,并利用信息的反馈,以达到自行车平衡的。 解:人骑自行车时,总是希望具有一定的理想状态(比如速度、方向、安全等),人脑根据这个理想状态指挥四肢动作,使自行车按预定的状态运动,此时,路面的状况等因素会对自行车的实际状态产生影响,使自行车偏离理想状态,人的感觉器官感觉自行车的状态,并将此信息返回到大脑,大脑根据实际状态与理想状态的偏差调整四肢动作,如此循环往复。其信息流动与反馈过程可用下图表示。 2、 C(S),Y(S)为输出的闭环传递函数;(2)以N(S)为输入,当R(S)=0时,分别以C(S),Y(S)为输出的闭环传递函数;(3)比较以上各传递函数的分母,从中可以得出什么结论。 (1)以R(S)为输入,当N(S)=0时,C(S) ,Y(S)为输出的闭环传递函数; (2)以N(S)为输入,当R(S)=0时,以C(S)为输出的闭环传递函数; 从上可知:对于同一个闭环系统,当输入的取法不同时,前向通道的传递函数不同,反馈回路的传递函数不同,系统的传递函数也不同,但系统的传递函数分母不变,这是因为分母反映了系统固有特性,而与外界无关。 四、计算题(每题10分,共30分) 1、求图所示两系统的传递函数,其中x i (t)、u i 为输入,x o (t)、u o 为输出 。(写出具体过程) 专业班级: 姓名: 学号: …………………………密………………………………封………………………………线………………………… )()()(1) ()()()()(2121s H s G s G s G s G s R s C s G C +==) ()()(1)()()()(211s H s G s G s G s R s Y s G Y +==)()()(1)()()()(212s H s G s G s G s N s C s G C +==)()()(1)()()()()()(2121s H s G s G s H s G s G s N s Y s G Y +-==机械工程控制基础(第六版)公式
机械工程控制基础实验
机械工程控制基础课后习题答案
《机械工程控制基础》实验指导书
机械工程控制基础简答题答案(1)
机械工程控制基础作业样本
机械工程控制基础知识点汇总
《机械工程控制基础》教学大纲
机械工程控制基础
《机械工程控制基础》实验报告
机械工程控制基础知识点整合
机械工程控制基础实验报告
机械工程控制基础考试题完整版
机械工程控制基础考试题完整版01
机械工程控制基础大作业(1)
机械工程控制基础试卷及答案
相关主题
文本预览