
2
v v e =1
v v =AB
r v v =0
45
45
v r =N
B
C
.第七章 点的合成运动习题解
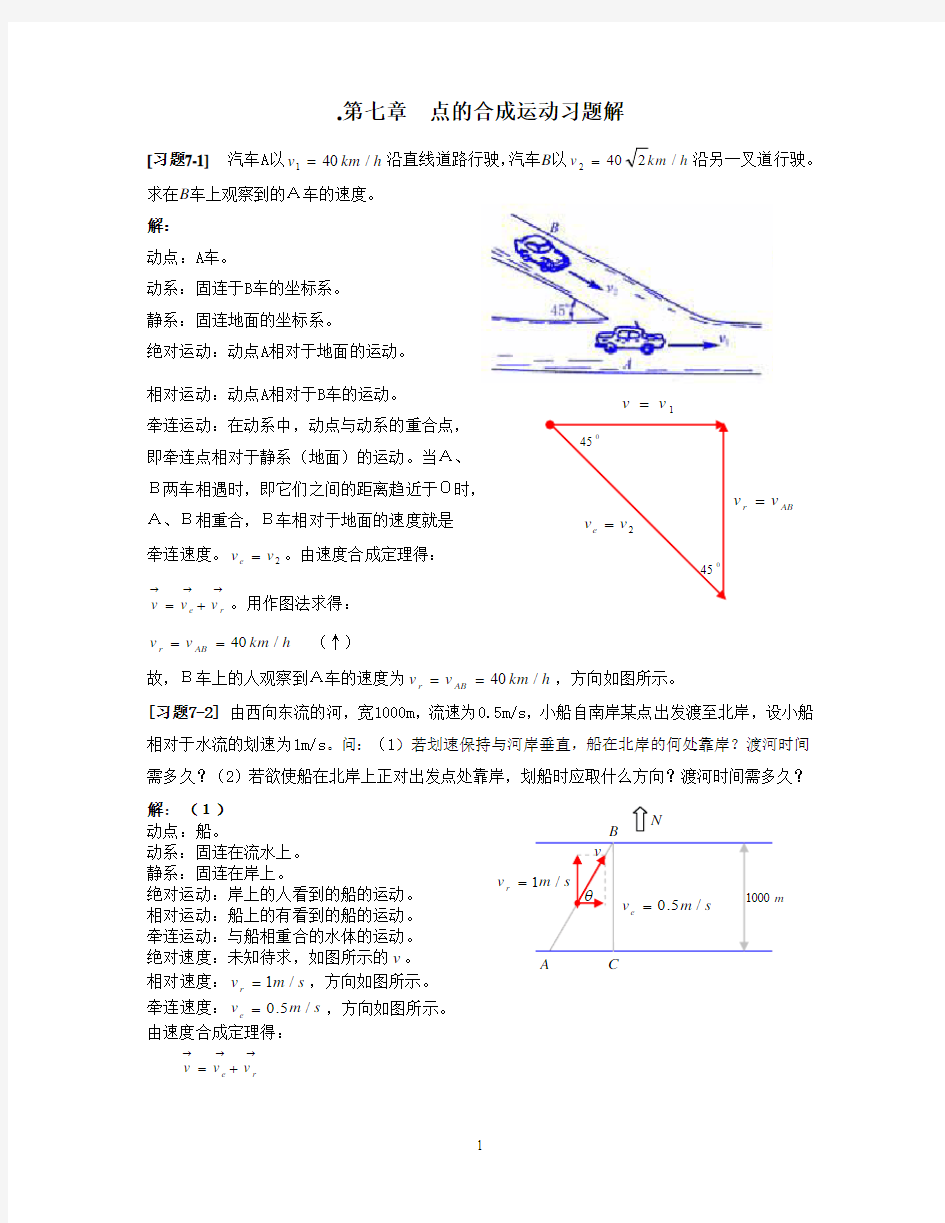
[习题7-1] 汽车A 以h km v /401=沿直线道路行驶,汽车B 以h km v /2402=沿另一叉道行驶。求在B 车上观察到的A车的速度。 解: 动点:A 车。
动系:固连于B 车的坐标系。 静系:固连地面的坐标系。
绝对运动:动点A 相对于地面的运动。 相对运动:动点A 相对于B 车的运动。 牵连运动:在动系中,动点与动系的重合点,
即牵连点相对于静系(地面)的运动。当A、 B两车相遇时,即它们之间的距离趋近于0时, A、B相重合,B车相对于地面的速度就是 牵连速度。2v v e =。由速度合成定理得:
→
→
→
+=r e v v v 。用作图法求得:
h km v v AB r /40== (↑)
故,B车上的人观察到A车的速度为h km v v AB r /40==,方向如图所示。
[习题7-2] 由西向东流的河,宽1000m ,流速为0.5m/s ,小船自南岸某点出发渡至北岸,设小船相对于水流的划速为1m/s 。问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方向?渡河时间需多久? 解:(1) 动点:船。
动系:固连在流水上。 静系:固连在岸上。
绝对运动:岸上的人看到的船的运动。 相对运动:船上的有看到的船的运动。 牵连运动:与船相重合的水体的运动。 绝对速度:未知待求,如图所示的v 。 相对速度:s m v r /1=,方向如图所示。 牵连速度:s m v e /5.0=,方向如图所示。 由速度合成定理得:
→
→
→
+=r
e v v v
v r
1=N
B
s
m /2s
m v e /1=v
)/(118.115.02
2
2
2s m v v v r e =+=
+=
435.635
.01arctan
arctan
===e
r v v θ
)(5002
1000tan 1000
m AC ==
=
θ
,即,船将在北岸下流500m 处靠岸。如图所示,A为出
发点,B为靠岸点。 渡河所花的时间:秒分4016)(1000/110001===s s
m m t
(2) 0
301
5.0arcsin
arcsin
===r
e v v α
)/(866.05
.012
2
2
2
s m v v v e r =+=
-=
即船头对准方向为北偏西0
30 渡河所花的时间:
秒分1519)(1155/866.010002===
s s
m m t
[习题7-3] 播种机以匀速率s m v /11=直线前进。种子脱离输种管时具有相对于输种管的速度s m v /22=。求此时种子相对于地面的速度,及落至地面上的位置与离开输种管时的位置之间
水平距离。 解: 动点:种子。
动系:固连于输种管的坐标系。 静系:固连于地面的坐标系。
绝对速度:种子相对于地面的速度,未知待求。 相对速度:s m v v r /22== 牵连速度:s m v v e /11==
→
→
→
+=r e v v v
)/(65.2120
cos 212210
2
2s m v =??-+=
120
sin 65.2)
60
sin(1=
-θ
07.1965
.2120sin arcsin
60
==-θ
93.40=θ
即→
v 与→
1v 之间的夹角为0
93.40=θ。 种子走过的水平距离为:
t v t v s x ?==θcos
2
2
1gt t v h y +
= 2
2
1sin gt t v h +=θ
2
8.95.093.40sin 65.225.0t t ?+= 025.0736.19.42
=-+t t ??
?
-=±-=
?-??-±
-=
不合舍去)
)((464.0)(11.08
.9813
.2736.19
.42)
25.0(9.44736
.1736.12
s s t )(22.011.093.40cos 65.20
m s =??=
[习题7-4] 砂石料从传送带A落到另一传送带B的绝对速度为s m v /41=,其方向与铅直线成
30角。设传送带B与水平面成0
15角,其速度为s m v /22=,求此时砂石料对于传送带B的
相对速度。又当传送带B的速度多大时,砂石料的相对速度才能与B 带垂直。
解:
动点:砂石料。
动系:固连于传送带B的坐标系。 静系:固连于地面的坐标系。
绝对速度:砂石料相对于地面的速度,s m v v /41==。 相对速度:砂石料相对于传送带B的速度,待求。 牵连速度:传送带B相对于地面的速度:s m v v e /22==
→
→
→
+=r e a v v v
)/(98.375
cos 422420
22s m v r =??-+=
e A
a v v =
v
e
v 当B r v v ⊥时,传送带B的速度为:
)/(04.115
sin 415
sin 0
s m v v a B ===
[习题7-5] 三角形凸轮沿水平方向运动,其斜边与水平线成α角。杆AB的A端搁置在斜面上,另一端B在气缸内滑动,如某瞬时凸轮以速度v 向右运动,求活塞B的速度。 解: 动点:A。
动系:固连于凸轮上的坐标系。 静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度,待求。 相对速度:A相对于凸轮的速度。 牵连速度:凸轮相对于地面的速度。
→
→
→
+=r e a v v v
αtan v v A =
因为杆AB作上下平动,故活塞B的速度为: αtan v v v A B ==
[习题7-6] 图示一曲柄滑道机构,长r OA =的曲柄,以匀角速度ω绕O轴转动。装在水平杆CB上的滑槽DE与水平线成0
60角。求当曲柄与水平线的夹角?分别为0
0、0
30、0
60时,杆BC的速度。 解: 动点:A。
a
90
BC
O
a
e
v
C
动系:固连于CBDE上的坐标系。
动系平动,
BC
CBDE
A
v
v
v=
=
静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度。
相对速度:A相对于DE的速度。
牵连速度:CBDE相对于地面的速度。
→
→
→
+
=
r
e
a
v
v
v
ω
r
v
a
=
0120
sin
)
90
120
180
sin(
a
BC
v
v
=
+
-
-?
0120
sin
)
30
sin(
?
?
r
v
BC=
-
ω
?
r
v
BC
?
-
=
120
sin
)
30
sin(
ω
ω
ω
?
r
r
r
v
BC3
3
2
3
2
1
120
sin
)
30
sin(
|
-
=
-
=
?
-
=
=
负号表示此时速度方向与图示方向相反,即向左。
120
sin
)
30
30
sin(
|
300
=
-
=
=
?
BC
v,此时往复运动改变方向。
ω
ω
ω
?
r
r
r
v
BC3
3
2
3
2
1
120
sin
)
30
60
sin(
|
600
=
=
?
-
=
=
,向右。
[习题7-7] 摇杆OC带动齿条AB上下移动,齿条又带动直径为100mm的齿轮绕O1轴摆
动。在图所示瞬时,OC之角速度ω
0
=0.5rad/s,求这时齿轮的角速度。
解:
动点:C。
动系:固连于OC杆上的坐标系。
静系:固连于地面的坐标系。
a
v e
v r
v A
30
90
绝对速度:C相对于地面的速度。 相对速度:C相对于OC杆的速度。 牵连速度:OC杆相对于地面的速度。
)/(231.05.030
cos 4.00
s m OC v e =?=
?=ω
→
→
→
+=r e a v v v )/(267.030
cos
2.030
cos 0
2
s m v v e a ==
=
75.0/2.01===ωr v v AB a
)/(33.505
.075.0/2.0/267.011s rad r ==
=ω
即齿轮的角速度为s rad /33.51=ω
[习题7-8] 摇杆滑道机构的曲柄OA长l ,以匀角速度ω0绕O轴转动。已知在图所示位置 OA⊥OO1,l AB 2=,求该瞬时BC杆的速度。 解: 动点:A。
动系:固连于D O 1杆上的坐标系。 静系:固连于地面的坐标系。
绝对速度:A相对于地面的速度,0ωl v a =。 相对速度:A相对于D O 1杆的速度。 牵连速度:D O 1杆相对于地面的速度。
→
→
→
+=r
e a v v v
00
2130
sin ωl v v a e =
= 012
11ωωl A O v D O e =?=
02
121ωωl l D O =
?
04
11
ωω=
D O
动点:B。
a
v
r
v B
e
a
v r
v
a
a n 动系:固连于D O 1杆上的坐标系。 静系:固连于地面的坐标系。 绝对速度:B相对于地面的速度。 相对速度:B相对于D O 1杆的速度。 牵连速度:D O 1杆相对于地面的速度。
→
→
→
+=r e a v v v
0014
141ωωωl l B O v D O e =?
=?=
000
155.1866
.030
cos ωωl l v v e a ==
=
BC 作平动,故
0155.1ωl v v a BC ==
[习题7-9] 一外形为半圆弧的凸轮A,半径r=300mm,沿水平方向向右作匀加速运动,其加速度aA=800mm/s2
。凸轮推动直杆BC沿铅直导槽上下运动。设在图所示瞬时,vA=600mm/s,求杆BC的速度及加速度。 解:
动点:B。
动系:固连于凸轮A上的坐标系。 静系:固连于地面的坐标系。 绝对速度:B相对于地面的速度。 相对速度:B相对于凸轮的速度。 牵连速度:B相对于凸轮的速度。
→
→
→
+=r e a v v v
凸轮在水平面上作平动,BC在铅垂方向上作平动。 A e v v =
)/(23.1039360030
cot 30
cot 0
s mm v v v v v A e a B BC ======
)/(12006002230
sin 0
s mm v v v e e r =?===
→
→→
→
→
→
++=+=τ
r n r
e r e a a a a a a a
e
C
v r
v r
a a
a e
a 上式在x 轴上的投影为:
n
r e a a a a -=0
30
cos 60
cos
r
v a a
a a r e n r
e a 2
2323?-=
-=
)/(4.8214300
)1200(2800732.12
2
s mm a a -=?
-?=,负号表示方向向下。
[习题7-10] 铰接四边形机构中的O1A=O2B=100mm,O1O2=AB,杆O1A以等角速度ω=2rad/s绕O1轴转动。AB杆上有一套筒C,此筒与CD杆相铰接,机构各部件都在同一铅直面内。求当φ=60°时CD杆的速度和加速度。 解:
动点:C。
动系:固连于AB杆上的坐标系。 静系:固连于地面的坐标系。 绝对速度:C相对于地面的速度。 相对速度:C相对于AB杆的速度。 牵连速度:AB杆相对于地面的速度。
→
→→+=r e a v v v
)/(20021001s mm A O v v v A C e =?=?===ω )/(1005.020060
cos 0
s mm v v e a =?==
)/(100s mm v v v a C CD ===
→
→
→
+=r e a a a a
A e a a = 0=τ
e a
)/(4002
1002
2
2
112
s mm A O A
O v
a
a n e
e =?=?==
=ω
)/(4.346866.040060
sin 2
s mm a a e a =?==
)/(4.346s mm a a a a C CD ===
[习题7-11] 具有圆弧形滑道的曲柄滑道机构,用来使滑道CD获得间歇往复运动。若已知曲柄
a
v e
v r
v A
a
a r
OA作匀速转动,其转速为ω=4πrad/s,又R=OA=100mm,求当曲柄与水平轴成角φ=30°时滑道CD的速度及加速度。 解:
动点:A。
动系:固连于滑道CD上的坐标系。 静系:固连于地面的坐标系。 绝对速度:A相对于地面的速度。 相对速度:A相对于滑道CD的速度。 牵连速度:滑道CD相对于地面的速度。
→
→
→
+=r e a v v v
s m s mm OA v v v a e CD /26.1)/(12564100≈=?=?===πω
→
→→
→
→
→
++=+=τ
r n r
e r e a a a a a a a
)/(775.15)
4(1.02
2
2
s m OA a a =?=?=πω
)/(775.151
.0256.12
2
2
s m R
v
a
n r
==
=
加速度在ξ方向的投影:
n
r e a a a a +-=-0
30
cos 60
cos
775.15866.05.0775.15+?-=?-e a )/(32.272
s m a e = )/(32.272
s m a a e CD ==
[习题7-12] 销钉M可同时在槽AB,CD内滑动。已知某瞬时杆AB沿水平方向移动的速度 v1=80mm/s,加速度a1=10mm/s2;杆CD沿铅直方向移动的速度v2=60mm/s,加速度a2=20mm/s2。求该瞬时销钉M的速度及加速度。 解:
动点:M。
动系:固连于AB上的坐标系。 静系:固连于地面的坐标系。 绝对速度:M相对于地面的速度。
e
v a
v
a
v r
v W
C
a r
a n
e
a 相对速度:M相对于AB的速度。 牵连速度:AB相对于地面的速度。
→
→
→
+=r e a v v v
)/(10060
80
2
2
2
2212
2s mm v v v v v r e a =+=
+=
+=
→
→
→
+=r
e a a a a
)/(36.2220
10
2
2
2
2
2212
2
s mm a a a a a r e a =+=
+=
+=
[习题7-13] 水力采煤用的水枪可绕铅直轴转动。在某瞬时角速度为ω,角加速度为零。设与转动轴相距r处的水点该瞬时具有相对于水枪的速度v1及加速度a1,求该水点的绝对速度及绝对加速度。 解:
动点:水点。
动系:固连于水枪上的坐标系。 静系:固连于地面的坐标系。 绝对速度:水点相对于地面的速度。 相对速度:水点相对于水枪的速度。
牵连速度:水枪上与水点相重点相对于地面的速度。
→
→
→
+=r e a v v v
2
221
21
2
22)(ω
ωr v v
r v
v v r
e
a +=+=
+=
→
→
→
→
++=C
r e a a a a a
00=?==r r a e ατ
2
ωr a n
e =
10
1290
sin 2sin 2v v v a r C ωωθω===
1a a r =
2
12
2
1)2()(v r a a a ωω+-= 2
12
2
1)2()(v r a a a ωω+-=
C
a M
n
e
a τ
e
a τ
r
a n
r
a e
a
[习题7-14] 半径为r的圆盘可绕垂直于盘面且通过盘心O的铅直轴z转动。一小球M悬挂于盘边缘的上方。设在图示瞬时圆盘的角速度及角加速度分别为ω及α,若以圆盘为动参考系,试求该瞬时小球的科氏加速度及相对加速度。 解:
动点:小球M。
动系:固连于圆盘上的坐标系。 静系:固连于地面的坐标系。 绝对速度:小球M相对于地面的速度。 相对速度:小球M相对于圆盘的速度。
牵连速度:圆盘上与小球M相重点相对于地面的速度。
2
ωr a n
e =
ατ
r a e =
2
290
sin 2sin 2ωωωθωr r v a r C =??==,方向如图所示。
2
ωr a n r = ατ
r a r = 2
4
2
24
22
2
)
()(α
ω
α
ω
τ
+=+=+=
r r r a a a r n
r r
[习题7-15] 一半径r=200mm的圆盘,绕通过A点垂直于图平面的轴转动。物块M以匀速率vr=400mm/s沿圆盘边缘运动。在图示位置,圆盘的角速度ω=2rad/s,角加速度α=4rad/s2
,求物块M的绝对速度和绝对加速度。 解:
动点:物块M。
动系:固连于圆盘上的坐标系。 静系:固连于地面的坐标系。 绝对速度:物块M相对于地面的速度。 相对速度:物块M相对于圆盘的速度。
牵连速度:圆盘上与物块M相重点相对于地面的速度。
→
→
→
+=r e a v v v
)/(240022002)2(s mm r v e =??=
=ω
C
a M
n
r
τ
a e
a M
a n
r
C a a +a a
e
v A
22135
cos 2r e r e a v v v v v -+=
)/(43.8945400
)21(4002400
2400
)2400
(2
2s mm ==-
???-+=
→
→
→
→
++=C
r e a a a a a
2800
420022=??==
ατ
r a e
28002200222
2
=??==ω
r a n
e
)/(16002800
222
s mm a a e e =?=
=
τ
0=τ
r a )/(800200
4002
2
2
s mm r
v a
r n r
==
=
)/(160090
sin 40022sin 22
s mm v a r C =???==θω
)/(44.2884)
8001600(1600
)
(2
2
2
2
2s mm a a a a n r C e a =++=
++=
31
.561600
2400arctan ==β
[习题7-16] 大圆环固定不动,其半径R=0.5m,小圆环M套在杆AB及大圆环上,如图所示。当θ=30°时,AB杆转动的角速度ω=2rad/s,角加速度α=2rad/s2
,试求该瞬时:(1)M沿大圆环滑动的速度;(2)M沿AB杆滑动的速度;(3)M的绝对加速度。 解:
动点:小圆环M。
动系:固连于AB杆上的坐标系。 静系:固连于地面的坐标系。
绝对速度:小圆环M相对于地面的速度。 相对速度:小圆环M相对于AB杆的速度。
牵连速度:AB杆上与小圆环M相重点相对于地面的速度。
→
→
→
+=r e a v v v
2
2
2
120
cos 2R R R AM -+=
)(866.05.0732.13m R =?==
A
τ
a
τ
e
a
r
A
n
a
a τ
a
a a
a M
)/(732.12866.0s m AM v e =?=?=ω
)/(2866
.0732,130
cos 0
s m v v e a ==
=
(M沿大圆环滑动的速度)
)/(15.0230
sin 0
s m v v a r =?==(M沿AB杆滑动的速度)
→
→
→
→
++=C
r e a a a a a
)/(85
.02
2
2
2
s m R
v a
a n a
==
=
)/(732.12866.02
s m AM a e =?=?=ατ
)
/(490
sin 122sin 22
s m v a r C =???==θω
如图所示,→
→
→
→
++=C r e a a a a a 在→
C a 方向上的投影为:
τ
τe C a n
a a a a a +=+0
30
cos 60
cos
732.14866.05.08+=+?τ
a a
)/(22
s m a a =τ
)/(25.82
8)
()(2
2
22
2s m a a a a n a a =+=
+=τ (M的绝对加速度)。
04
.148
2arctan arctan ===n a
a a
a τ
β ,如图所示。
[习题1-17] 曲柄OA,长为2r,绕固定轴O转动;圆盘半径为r,绕A轴转动。已知mm r 100=,在图示位置,曲柄OA的角速度s rad /41=ω,角加速度2
1/3s rad =α,圆盘相
对于OA的角速度s rad /62=ω,角加速度2
2/4s rad =α。求圆盘上M点和N点的绝对速度和绝对加速度。 解:
动点:M、N。
动系:固连于OA杆上的坐标系。 静系:固连于地面的坐标系。 绝对速度:M、N相对于地面的速度。 相对速度:M、N相对于OA杆的速度。
牵连速度:OA杆(包括其延长线)上与M、N相重点相对于地面的速度。
e
v
r
O
τ
e
e
v
a
v M
M
a →
→→+=r e a v v v
M点的速度:
)/(1200410033)(11s mm r r OA v e =??==+=ωω
)/(60061002s mm r v r =?==ω
)/(6006001200s mm v v v r e a =-=-=(方向与→
e v 相同)
)/(600s mm v v a M ==
M点的加速度:
→
→
→
→
++=C
r e a a a a a
)/(9003100332
1s mm r a e =??==ατ
)/(48004
100332
2
2
1s mm r a n
e =??==ω
)/(40041002
2s mm r a r =?==ατ
)/(3600610022
2
2s mm r a n
r =?==ω
)/(480090
sin 60042sin 22
1s m v a r C =???==θω
2
2)()(ττr e C n r n e a M a a a a a a a -+-+=
=
)/(56.3634)
400900()480036004800(2
2
2
s mm a M =-+-+=
09
.8256
.3634500arccos
==?
N点的速度: )/(43.8944100551s mm r v e =??=
=
ω
)/(60061002s mm r v r =?==ω
43
.635arccos
==r
r β
βcos 22
2
r e r e a v v v v v -+=
)/(62.8245
16005400
2600
)5400
(2
2
s mm v a =?
??-+=
a y
y
N
a ∑N点的加速度:
→
→
→
→
++=C
r e a a a a a
)/(82.6703100552
1s mm r a e =??==ατ
)/(71.35774100552
2
2
1s mm r a n
e =??=
=
ω
)/(40041002
2s mm r a r =?==ατ
)/(360061002
2
2
2s mm r a n
r =?==ω
)/(480090
sin 60042sin 220
1s m v a r C =???==θω
C n e e n r ax
a a a a a
-++=∑0
043.63cos 57.26cos τ
4800
43.63cos 71.357757.26cos 82.67036000
-++= )/(25.10002
s mm =
057.26sin 57.26cos ττe n e r ay
a a a a
+--=∑
57
.26sin 82.67057
.26cos 71.3577400+--=
)/(81.32992
s mm -=
2
2
)
()(∑∑+=
=ay ax a N a a a a
)/(08.3448)
81.3299(25.10002
2
2
s mm =-+=
14
.7308
.344825.1000arccos
arccos
===∑a
ax
a a
δ
[习题1-18] 在图示机构中, 已知AA′=BB′=r=0.25m, 且AB=A′B′。连杆AA′以匀角速度ω=2rad/s绕A′转动,当θ=60°时,槽杆CE位置铅直。求此时CE的角速度及角加速度。 解:
动点:D。
动系:固连CE上的坐标系。 静系:固连于地面的坐标系。 绝对速度:D相对于地面的速度。 相对速度:D相对于CE杆的速度。 牵连速度:CE杆上与D相重点相对于地面的速
a
v e
v
a n
e
a r
a a
a 度。
→
→
→
+=r e a v v v
)/(5.0225.0s m r v v v A D a =?====ω 0
30cos a CE e v CD v =?=ω
30
cos 5.05.0?=?CE ω
)/(866.0s rad CE =ω
→
→
→
→
++=C
r e a a a a a θ
ωsin 2r CE C v a =
)/(433.090sin )5.05.0(866.022
s m =????=
CE
CE e CD a αατ
5.0=?= 005.0=?=?=CE a r a ατ
)/(12
25.02
2
2
s m r a n
a =?=?=ω
→
→→
→
++=C r e a a a a a 在→
C a 方向的投影为: τ
e
C n
a a a a +=0
60
cos CE
α5.0433.05.01+=?
)/(134.0s rad CE =α
[习题1-19] 销钉M可同时在AB、CD两滑道内运动, CD为一圆弧形滑槽,随同板以匀角速s rad /10=ω绕O转动;在图示瞬时,T字杆平移的速度s mm v /100=,加速度
2
/120s mm a =。试求该瞬时销钉M对板的速度与加速度。
解: 动点:M。
动系:固连于T形板上的坐标系。 静系:固连于地面的坐标系。 绝对速度:M相对于地面的速度。 相对速度:M相对于T形板的速度。
牵连速度:T形板上与M相重点相对于地面的速度。
r
v e
v
M
a v
v M
a
v M
e
a r
a a
a
M
a →
→→+=r e a v v v
s mm v e /100= )/(2005
.010060
cos 0
s mm v v e a ==
=
)/(2.173866.020060
sin 0
s mm v v a r =?==(相对于AB)
→
→
→
+=r e a a a a 2
/120s mm a a e == )/(2405
.012060
cos 2
s mm a a e a ==
=
)/(85.20760
sin 2
s mm a a a r ==(相对于AB)
若取 动点:M。
动系:固连于方形板上的坐标系。 静系:固连于地面的坐标系。 绝对速度:M相对于地面的速度。 相对速度:M相对于方形板的速度。
牵连速度:方形板上与M相重点相对于地面的速度。 则:
→
→
→
+=r e a v v v
销钉相对于CD滑槽(方形板)的速度:
相对于方形板v OM +?=0200ω
)/(1001100200s mm OM v v 0a =?-=?-ω=板
相对于方形
→
→
→
→
++=C
r e a a a a a
)
/(20090
sin 10012sin 22
0s mm v a r C =???==θω
)/(10011002
2
2
0s mm OM a n
e =?=?=ω
)
/(100100
1002
2
2
s mm OM
v a
r
n r
==
=
y
→→→→++=C r e a a a a a 在→
a a 方向上的投影为: τ
r
a a a =
)/(2402
s mm a r =τ
)/(260100
240
)
()(2
2
2
2
2
s mm a a a n
r r r =+=+=
τ
[习题1-20] 已知点M在动坐标系212y O x 平面内运动,其运动方程为t t x 4322+=,
t t y 242
2-=,2x 与1x (1x 轴与x 轴保持平行)的夹角t 2=?,点1O 的运动规律为t x 31=,2
154t t y -=。试用建立运动方程式及合成运动两种方法求点M的速度。
解:
方法一:建立运动方程法。
对于静坐标系而言,动点M的坐标为: ??sin cos 221y x x x -+=
t t t t t t t x 2sin )24(2cos )43(32
2
--++=
t t t t t t t t t t dt
dx v x 2cos )24(22sin )28(2sin )43(22cos )46(32
2----+-++==
t t t t t t v x 2sin )6162(2cos )8104(32
2
--+-++=
??cos sin 221y x y y ++=
t t t t t t t t y 2cos )24(2sin )43()54(2
22-+++-= t t t t t t t t t t t dt dy v y 2sin )24(22cos )28(2cos )43(22sin )46()104(2
2
---+++++-==
t t t t t t t dt
dy v y 2cos )6162(2sin )8104(1042
2----++-==
方法二:合成运动法。 动点:M。 动系:111y O x 静系:xOy 。
绝对速度:M相对于xOy 坐标系的速度。
相对速度:M相对于111y O x 坐标系的速度。
牵连速度:111y O x 上与M相重点相对于xOy 的速度。
→
→
→
+=r
e a v v v
牵连速度的水平分量:
3)3(1===
t dt
d dt
dx v ex
牵连速度的竖直分量:
t t t dt
d dt
dy v ey 104)54(2
1-=-==
M点相对于111y O x 坐标的横坐标为: ??sin cos 221
y x x r -=
t t t t t t x r 2sin )24(2cos )43(2
2
1--+=
相对速度的水平分量为:
t t t t t t t t t t dt dx v r rx 2cos )24(22sin )28(2sin )43(22cos )46(2
2
1----+-+==
t t t t t t dt
dx v r rx 2sin )6162(2cos )8104(2
21--+-+==
M点速度的水平分量:
rx ex x v v v +=
t t t t t t v x 2sin )6162(2cos )8104(32
2
--+-++=
M点相对于111y O x 坐标的纵坐标为: ??cos sin 221y x y r +=
t t t t t t y r 2cos )24(2sin )43(2
2
1-++=
相对速度的竖直分量为:
t t t t t t t t t t dt
dy v r ry 2sin )24(22cos )28(2cos )43(22sin )46(2
2
1---++++==
t t t t t t v ry 2cos )6162(2sin )8104(2
2
----+=
ry ey y v v v +=
M点速度的竖直分量:
r v x
y
M
x
y
z
τ
e
a n
e
a 0
30
C
a ω
r
v 0
30
r
n
r a a =t t t t t t t v y 2cos )6162(2sin )8104(1042
2----++-=
[习题7-21] 板ABCD绕z轴以ω=0.5t(其中ω以rad/s计,t以s计)的规律转动,小球M在半径r=100mm的圆弧槽内相对于板按规律s=50πt/3(s以mm计,t以s计)运动,求t=2s时,小球M的速度与加速度。 解: 动点:M。
动系:固连于板ABCD 上的坐标系。 静系:固连于地面的坐标系。 绝对速度:M相对于地面的速度。 相对速度:M相对于板ABCD 的速度。
牵连速度:板ABCD 上与M相重点相对于地面的速度。
→
→
→
+=r
e a v v v
6
100
350t
t r
s ππ?=
?=
=
小球绕CD 中点在圆弧槽滑动的角速度为: )/(6
1s rad dt
d π
?ω=
=
)/(3
506
1001s mm r v r ππ
ω=
?
==
3
6
2
)2(π
π?=
?=
ωπ
ρω)6
sin
(r r v e -==
)/(4.1325.0)866.01(100s mm =??-?=
)/(543
.524.13)
()(2
22
2s mm v v v r e a =+=+=
2481.054
4.13cos ==
=
a
e v v α,0
63.75),(==αa e v v 。
→
→
→
→
++=C r e a a a a a
1.图示结构中的各构件自重不计。已知P =5 kN ,M=5 kN. m,q = 2.5kN/m 。 试求固定端A及滚动支座B处的约束反力。 2、一重W的物体置于倾角为α的斜面上,若摩擦系数为f, 且tgα 2 v v e =1 v v =AB r v v =0 450 45 v r =N 竞赛资料 点的合成运动习题解 [习题7-1]汽车A 以h km v /401=沿直线道路行驶,汽车B 以h km v /2402=沿另一叉道行驶。求在B 车上观察到的A车的速度。 解: 动点:A 车。 动系:固连于B 车的坐标系。 静系:固连地面的坐标系。 绝对运动:动点A 相对于地面的运动。 相对运动:动点A 相对于B 车的运动。 牵连运动:在动系中,动点与动系的重合点, 即牵连点相对于静系(地面)的运动。当A、 B两车相遇时,即它们之间的距离趋近于0时, A、B相重合,B车相对于地面的速度就是 牵连速度。2v v e =。由速度合成定理得: → →→ +=r e v v v 。用作图法求得: h km v v AB r /40== (↑) 故,B车上的人观察到A车的速度为h km v v AB r /40==,方向如图所示。 [习题7-2]由西向东流的河,宽1000m ,流速为s ,小船自南岸某点出发渡至北岸,设小船相对于水流的划速为1m/s 。问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方向?渡河时间需多久? 解:(1) 动点:船。 动系:固连在流水上。 静系:固连在岸上。 绝对运动:岸上的人看到的船的运动。 相对运动:船上的有看到的船的运动。 牵连运动:与船相重合的水体的运动。 绝对速度:未知待求,如图所示的v 。 相对速度:s m v r /1=,方向如图所示。 牵连速度:s m v e /5.0=,方向如图所示。 由速度合成定理得: 理论力学---1 1-1.两个力,它们的大小相等、方向相反和作用线沿同一直线。这是 (A)它们作用在物体系统上,使之处于平衡的必要和充分条件; (B)它们作用在刚体系统上,使之处于平衡的必要和充分条件; (C)它们作用在刚体上,使之处于平衡的必要条件,但不是充分条件; (D)它们作用在变形体上,使之处于平衡的必要条件,但不是充分条件; 1-2. 作用在同一刚体上的两个力F1和F2,若F1 = - F2,则表明这两个力 (A)必处于平衡; (B)大小相等,方向相同; (C)大小相等,方向相反,但不一定平衡; (D)必不平衡。 1-3. 若要在已知力系上加上或减去一组平衡力系,而不改变原力系的作用效果,则它们所作用的对象必需是 (A)同一个刚体系统; (B)同一个变形体; (C)同一个刚体,原力系为任何力系; (D)同一个刚体,且原力系是一个平衡力系。 1-4. 力的平行四边形公理中的两个分力和它们的合力的作用范围 (A)必须在同一个物体的同一点上; (B)可以在同一物体的不同点上; (C)可以在物体系统的不同物体上; (D)可以在两个刚体的不同点上。 1-5. 若要将作用力沿其作用线移动到其它点而不改变它的作用,则其移动范围 (A)必须在同一刚体内; (B)可以在不同刚体上; (C)可以在同一刚体系统上; (D)可以在同一个变形体内。 1-6. 作用与反作用公理的适用范围是 (A)只适用于刚体的内部; (B)只适用于平衡刚体的内部; (C)对任何宏观物体和物体系统都适用; (D)只适用于刚体和刚体系统。 1-7. 作用在刚体的同平面上的三个互不平行的力,它们的作用线汇交于一点,这是刚体平衡的 (A)必要条件,但不是充分条件; (B)充分条件,但不是必要条件; (C)必要条件和充分条件; (D)非必要条件,也不是充分条件。 1-8. 刚化公理适用于 (A)任何受力情况下的变形体; (B)只适用于处于平衡状态下的变形体; (C)任何受力情况下的物体系统; (D)处于平衡状态下的物体和物体系统都适用。 1-9. 图示A、B两物体,自重不计,分别以光滑面相靠或用铰链C相联接,受两等值、反向且共线的力F1、F2的作用。以下四种由A、B所组成的系统中,哪些是平衡的? 理论力学Ⅵ模拟试题2答案 教师________________ 学号_________________ 姓名_________________ 一、选择题(每题5分。请将答案的序号填入划线内) 1、简支梁受载荷如图(a )、(b )、(c )所示, 今分别用、、表示三种情况下支座AB 1N F 2N F 3N F B 的 反力,则它们之间的关系应为 ④ 。 ① ; 321N N N F F F =<② ; 321N N N F F F =>③ ; 321N N N F F F >=④ ; 321N N N F F F <=⑤ 。 321N N N F F F == 2、直角刚杆OAB 在图示瞬时有rad/s 2 =ω, ,若,2 5 rad/s α=cm 40 =OA cm 30 =AB ,则B 点的速度大小为 ① cm/s ,法向加速度的大小为 ③ 2cm/s , 切向加速度的大小为 ④ 2cm/s 。 ① 100; ② 160; ③ 200; ④ 250。 3、若某点按(以米计,t 以秒计)的规律运动, 则时点经过的路程为228t s ?=s s 3=t ③ 。 ① 米; ② 米; 108③ 米; ④ 米至18米以外的一个数值。 188 4、图示两均质轮的质量皆为m ,半径皆为R ,用不计质量的绳绕在一起,两轮角速度分别为1ω和2ω,则系统动能为 ④ ① ()22212212121ωωR m mR +?? ????=T ; ② 22221221212121ωω??????+??????= mR mR T ; ③ ()222222122121212121ωωω??????++?? ????=mR R m mR T ; ④ ()2222212122121212121ωωωω??????+++??????= mR R R m mR T 。 二、填空题(每题5分。请将答案的序号填入划线内。) 1、在图示平面机构中,杆cm 40=AB ,以rad/s 31=ω的匀角速度绕轴转动,而CD 以A rad/s 12=ω绕B 轴转动,,图示瞬时cm 30==BC BD CD AB ⊥。若取为动坐标,则此时点的牵连速度的大小为AB D cm/s 150,牵连加速度的大 小为2cm/s 450。 (方向均需在图中画出) 2、一半径为20cm ,质量为10kg 的匀质圆盘,在水平面内以角速度rad/s 2=ω 绕O 轴转动。一质量为5kg 的小球M ,在通过O 轴的直径槽内以(以cm 计,t 以s 计)的规律运动,则当t l 5=l s 2=t 时系统的动量的大小为s N 511.0?=p 。 3、物、A B 分别重W ,kN 1=A kN 5.0=B W ,与 A B 以及与地面间的摩擦系数均为A 2.0=f ,、A B 通过滑轮C 用一细绳连接,滑轮处摩擦不计。今在物块上作用一水平力A P ,则能拉动物体时该力应大于500A N 。 2- 1凸轮以匀角速度绕°轴转动,杆AB的A端搁在凸轮上。图示瞬时AB杆 处于水平位置,°A为铅直。试求该瞬时AB杆的角速度的大小及转向解:V a V e V r 其中,v e. r2e2 V a V e tg e v e 所以AB a(逆时针) 求当0时,顶杆的速度 2-2.平底顶杆凸轮机构如图所示 转动,轴0位于顶杆轴线上为 R,偏心距OC e, 顶杆AB可沿导轨上下移动, 工作时顶杆的平底始终接触凸轮表面 凸轮绕轴0转动的角速度为 偏心圆盘绕轴0 该凸轮半径 ,0C与水平线成夹角 A (1)运动分析 轮心C 为动点,动系固结于AB ;牵连运动为上下直线平移,相对运动为与平底 平行直线,绝对运动为绕0圆周运动。 (2)速度分析,如图b 所示 V - V - V a e r 方向 丄OC 1 - 大小 ? ? y 肋二人二 v a cos 理论力学部分 第一章 静力学基础 一、是非题 1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。 ( ) 2.两端用光滑铰链连接的构件是二力构件。 ( ) 3.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。 ( ) 4.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。 ( ) 5.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。 ( ) 6.约束反力的方向总是与约束所能阻止的被约束物体的运动方向一致的。 ( ) 二、选择题 线但方向相反。 1.若作用在A 点的两个大小不等的力1F 和2F ,沿同一直则其合力可以表示为 。 ① 1F -2F ; ② 2F -1F ; ③ 1F +2F ; 2.三力平衡定理是 。 ① 共面不平行的三个力互相平衡必汇交于一点; ② 共面三力若平衡,必汇交于一点; ③ 三力汇交于一点,则这三个力必互相平衡。 3.在下述原理、法则、定理中,只适用于刚体的有 。 ① 二力平衡原理; ② 力的平行四边形法则; ③ 加减平衡力系原理; ④ 力的可传性原理; ⑤ 作用与反作用定理。 4.图示系统只受F 作用而平衡。欲使A 支座约束力的作用线与AB 成30?角,则斜面的倾角应为 ________。 ① 0?; ② 30?; ③ 45?; ④ 60?。 5.二力A F 、B F 作用在刚体上且 0=+B A F F ,则此刚体________。 ①一定平衡; ② 一定不平衡; ③ 平衡与否不能判断。 三、填空题 1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是 。 2.已知力F 沿直线AB 作用,其中一个分力的作用与AB 成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为 度。 3.作用在刚体上的两个力等效的条件是 《理论力学》试题库 第一部分 填空题: 第一类: 1,已知某质点运动方程为x=2bcoskt,y=2bsinkt,其中b 、k 均为常量,则其运动轨迹方程为————————————,速度的大小为————————————,加速度的大小为————————————。 2、已知某质点运动方程为x=2cos3t,y=2sin3t,z=4t 则其运动速度的大小为 ,加速度的大小为 。 3、已知某质点运动方程为r=e ct ,θ=bt,其中b 、c 是常数,则其运动轨道方程为——————————————————————,其运动速度的大小为——————————,加速度的大小为————————————。 4、已知某质点的运动方程为x=2bcos 2kt ,y=bsin2kt ,则其运动轨道方程为 ;速度大小为 ;加速度大小为 。 5、已知质点运动的参数方程为y=bt ,θ=at ,其中a 、b 为常数,则此质点在极坐标系中的轨道方程式为 ,在直角坐标系中的轨道方程式为 。 6、已知某质点的运动方程为r=at,θ=bt,其中a 、b 是常数,则其运动轨道方程为——————————————————————,其运动速度的大小为——————————,加速度的大小为————————————。 7、已知某质点运动方程为r=at,θ=b/t,其中a 、b 是常数,则其运动轨道方程为———————————————,其运动速度的大小为——————————,加速度的大小为—————————。 8、已知某质点的运动方程为x=at,y=a(e t -e -t )/2,其中a 为常数,则其运动轨道方程为——————————————————————,曲率半径为——————————。 第二类: 9、质点在有心力作用下,其————————————————————均守恒,其运动轨道的微 分方程为——————————————————————,通常称此轨道微分方程为比耐公式。 10、柯尼希定理的表达式为————————————————————,其中等式右边第一项和第 理论力学复习题 一、判断题 1.在自然坐标系中,如果速度的大小v=常数,则加速度a=0。(╳)2.刚体处于瞬时平动时,刚体上各点的加速度相同。(╳)3.已知质点的质量和作用于质点的力,其运动规律就完全确定。(╳)4.两个半径相同,均质等厚的铁圆盘和木圆盘,它们对通过质心且垂直于圆面的回转半径相同。(╳)5.质心的加速度只与质点系所受外力的大小和方向有关,而与这些外力的作用位置无关。(√) 6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。(╳)7.刚体作平面运动,若某瞬时其平面图形上有两点的加速度的大小和方向均相同,则该瞬时此刚体上各点的加速度都相同。(√)8.在刚体运动过程中,若其上有一条直线始终平行于它的初始位置,这种刚体的运动就是平移。(╳)9.刚体平移时,若刚体上任一点的运动已知,则其它各点的运动随之确定。(√) 10、圆轮沿直线轨道作纯滚动,只要轮心作匀速运动,则轮缘上任意一点的加速度的方向均指向轮心。(√) 11、用合成运动的方法分析点的运动时,若牵连角速度ωe≠0,相对速度υr≠0, 则一定有不为零的科氏加速度。(╳) 12、若平面力系对一点的主矩为零,则此力系不可能合成为一个合力。(╳) 13、在任意初始条件下,刚体不受力的作用、则应保持静止或作等速直线平移。(╳) 14、不论牵连运动的何种运动,点的速度合成定理v a=v e+v r皆成立。(√) 15、在平面任意力系中,若其力多边形自行闭合,则力系平衡。(╳) 16、某一力偶系,若其力偶矩矢构成的多边形是封闭的,则该力偶系向一点简化时,主矢一定等于零,主矩也一定等于零。(√) 17、设一质点的质量为m,其速度v与x轴的夹角为α,则其动量在x轴上的投影为mv =mvcosα。(√)x 16、已知直角坐标描述的点的运动方程为X=f1(t),y=f2(t),z=f3(t),则任一瞬时点 的速度、加速度即可确定。(√)17、一动点如果在某瞬时的法向加速度等于零,而其切向加速度不等于零,尚不能决定 该点是作直线运动还是作曲线运动。(√)18、刚体作平面运动时,平面图形内两点的速度在任意轴上的投影相等。(╳) 第五章 点的合成运动 本章要点 一、绝对运动、相对运动和牵连运动 一个动点, 两个参照系: 定系,动系; 三种运动:绝对运动、相对运动和牵连运动, 包括三种速度:绝对速度、相对速度和牵连速度; 三种加速度:绝对加速度、相对加速度和牵连加速度; 牵连点:动参考系上瞬时与动点相重合的那一点称为动参考系上的牵连点。 二、速度合成定理 动点的绝对速度,等于它在该瞬时的牵连速度与相对速度的矢量和,即 r e a v v v += 解题要领 1 定系一般总是取地面,相对定系运动的物体为动系,动点不能在动系上. 2 牵连速度是牵连点的速度. 3 速度合成定理中的三个速度向量,涉及大小方向共六个因素,能且只能存在两个未知数方能求解,因此,至少有一个速度向量的大小方向皆为已知的. 4 作速度平行四边形时,注意作图次序:一定要先画大小方向皆为已知的速度向量,然后再根据已知条件画上其余两个速度向量,特别注意,绝对速度处于平行四边形的对角线位置. 5 用解三角形的方法解速度合成图. 三、加速度合成定理 1 牵连运动为平移时的加速度合成定理 当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和,即 r e a a a a +=, 当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成 n r t r n e t e n a t a a a a a a a +++=+ 其中 t v a d d a t a =,a 2a n a ρv a =,t v a d d e t e =,e 2e n e ρv a =,t v a d d r t r =,r 2r n r ρv a =,r e a ,,ρρρ依次为绝 对轨迹、牵连轨迹和相对轨迹的曲率半径。 第一章静力学公理与受力分析(1) 一.是非题 1、加减平衡力系公理不但适用于刚体,还适用于变形体。() 2、作用于刚体上三个力的作用线汇交于一点,该刚体必处于平衡状态。() 3、刚体是真实物体的一种抽象化的力学模型,在自然界中并不存在。() 4、凡是受两个力作用的刚体都是二力构件。() 5、力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。()二.选择题 1、在下述公理、法则、原理中,只适于刚体的有() ①二力平衡公理②力的平行四边形法则 ③加减平衡力系公理④力的可传性原理⑤作用与反作用公理 三.画出下列图中指定物体受力图。未画重力的物体不计自重,所有接触处均为光滑接触。整体受力图可在原图上画。 )a(球A )b(杆AB d(杆AB、CD、整体 )c(杆AB、CD、整体) 精选文库 -- - 2 - )e (杆AC 、CB 、整体 )f (杆AC 、CD 、整体 四.画出下列图中指定物体受力图。未画重力的物体不计自重,所有接触处均为光滑接触。多杆件的整体受力图可在原图上画。 )a (球A 、球B 、整体 )b (杆BC 、杆AC 、整体 精选文库 -- - 3 - 第一章 静力学公理与受力分析(2) 一.画出下列图中指定物体受力图。未画重力的物体不计自重,所有接触处均为光滑 接触。整体受力图可在原图上画。 W A D B C E Original Figure A D B C E W W F Ax F Ay F B FBD of the entire frame )a (杆AB 、BC 、整体 )b (杆AB 、BC 、轮E 、整体 )c (杆AB 、CD 、整体 )d (杆BC 带铰、杆AC 、整体 第七章点的合成运动习题解析[习题7-1]汽车A以V i 40km/h沿直线道路行驶,汽车B以V2 4O.._2km/h沿另一叉道行驶。 求在B车上观察到的A车的速度。 解: 动点:A车。 动系:固连于B车的坐标系。 静系:固连地面的坐标系。 绝对运动:动点A相对于地面的运动。 相对运动:动点A相对于B车的运动。 牵连运动:在动系中,动点与动系的重合点,即牵连点相对于静系(地面)的运动。当A、 E两车相遇时,即它们之间的距离趋近于0时, A、E相重合,E车相对于地面的速度就是 牵连速度。V e V2。由速度合成定理得: V V e V r。用作图法求得: v r V AB 40km/ h (f) 故,E车上的人观察到A车的速度为V r V AB [习题7-2]由西向东流的河, 相对于水流的划速为1m/s。问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方 向?渡河时间需多久?解:(1) 动点:船。 动系:固连在流水上。 静系:固连在岸上。 绝对运动:岸上的人看到的船的运动。相对运动:船上的有看到的船的运动。牵连运动:与船相重合的水体的运动。绝对速度:未知待求,如图所示的V。 相对速度:V r1m/s,方向如图所示。牵连速度:V e 0.5m/s,方向如图所示。由速度合成定理得: V V e V r 40km/h,方向如图所示。 宽1000m,流速为0.5m/s ,小船自南岸某点出发渡至北岸,设小船 V r v .. V V -: 0.52 12 1.118(m/s) arcta n 土 V e 1 arcta n —— 0.5 AC 1000 1000 500( m),即,船将在北岸下流5 0 0 tan 2 n 处靠岸。如图所示,A 为出 渡河所花的时间: t 1 1000m 1000(s) 16 分 40 秒 1m/ s 发点,E 为靠岸点。 (2) ? V e . 0.5 arcs in arcs in v r 1 v . v ; v ; 12 0.52 即船头对准方向为北偏西 300 渡河所花的时间: t 2 1000 m 1155( s) 19 分 15秒 0.866m/ s 300 0.866(m/s) [习题7-3]播种机以匀速率 w 1m/s 直线前进。种子脱离输种管时具有相对于输种管的速度 v ; 2m/s 。求此时种子相对于地面的速度,及落至地面上的位置与离开输种管时的位置之间 水平距离。 解: 动点:种子。 动系:固连于输种管的坐标系。 静系:固连于地面的坐标系。 绝对速度:种子相对于地面的速度,未知待求。 相对速度:v r v 2 2m/ s 牵连速度:v e v 1 1m/s v v e 5 v 12 22 2 1 2cos120° 2.65(m/s) 63.435° 《理论力学》试题库 ————————————————————————————————作者:————————————————————————————————日期: 《理论力学》试题库 第一部分填空题: 第一类: 1,已知某质点运动方程为x=2bcoskt,y=2bsinkt,其中b、k均为常量,则其 运动轨迹方程为 ————————————,速度的大小为 ———————————— ,加速度的大小为 ———— ———————— 。 2、已知某质点运动方程为x=2cos3t,y=2sin3t,z=4t则其运动速度的大小为,加速度的大小为。 3、已知某质点运动方程为r=e ct,θ=bt,其中b、c是常数,则其运动轨道方程 为 ——————————————————————,其运动速度的大小为 —————————— ,加速度的大小为 — ——————————— 。 4、已知某质点的运动方程为x=2bcos2kt,y=bsin2kt,则其运动轨道方程 为 ;速度大小为;加速度大小为。 5、已知质点运动的参数方程为y=bt,θ=at,其中a、b为常数,则此质点在极坐标系中的轨道方程式为,在直角坐标系中的轨道方程式为。 6、已知某质点的运动方程为r=at,θ=bt,其中a、b是常数,则其运动轨道方 程为 ——————————————————————,其运动速度的大小为 —————————— ,加速度的大小为 ———————————— 。 7、已知某质点运动方程为r=at,θ=b/t,其中a、b是常数,则其运动轨道方 程为 ———————————————,其运动速度的大小为 —————————— ,加速度的大小为 —————— ——— 。 8、已知某质点的运动方程为x=at,y=a(e t-e-t)/2,其中a为常数,则其运动 轨道方程为 ——————————————————————,曲率半径为 —————————— 。 第二类: 9、质点在有心力作用下,其 ———————————————————— 均守恒,其运动轨道的微 理论力学---1 1-1. 两个力,它们的大小相等、方向相反和作用线沿同一直线。这是 (A)它们作用在物体系统上,使之处于平衡的必要和充分条件; (B)它们作用在刚体系统上,使之处于平衡的必要和充分条件; (C)它们作用在刚体上,使之处于平衡的必要条件,但不是充分条件; (D)它们作用在变形体上,使之处于平衡的必要条件,但不是充分条件; 1-2. 作用在同一刚体上的两个力F1和F2,若F1 = - F2,则表明这两个力 (A)必处于平衡; (B)大小相等,方向相同; (C)大小相等,方向相反,但不一定平衡; (D)必不平衡。 1-3. 若要在已知力系上加上或减去一组平衡力系,而不改变原力系的作用效果,则它们所作用的对象必需是 (A)同一个刚体系统; (B)同一个变形体; (C)同一个刚体,原力系为任何力系; (D)同一个刚体,且原力系是一个平衡力系。 1-4. 力的平行四边形公理中的两个分力和它们的合力的作用范围 (A)必须在同一个物体的同一点上; (B)可以在同一物体的不同点上; (C)可以在物体系统的不同物体上; (D)可以在两个刚体的不同点上。 1-5. 若要将作用力沿其作用线移动到其它点而不改变它的作用,则其移动范围 (A)必须在同一刚体内; (B)可以在不同刚体上; (C)可以在同一刚体系统上; (D)可以在同一个变形体内。 1-6. 作用与反作用公理的适用范围是 (A)只适用于刚体的内部; (B)只适用于平衡刚体的内部; (C)对任何宏观物体和物体系统都适用; (D)只适用于刚体和刚体系统。 1-7. 作用在刚体的同平面上的三个互不平行的力,它们的作用线汇交于一点,这是刚体平衡的 (A)必要条件,但不是充分条件; (B)充分条件,但不是必要条件; (C)必要条件和充分条件; (D)非必要条件,也不是充分条件。 1-8. 刚化公理适用于 (A)任何受力情况下的变形体; (B)只适用于处于平衡状态下的变形体; (C)任何受力情况下的物体系统; (D)处于平衡状态下的物体和物体系统都适用。 本部理论力学复习资料 计算各题中构件的动量、对转轴的转动惯量,对转轴的动量矩、动能。图a-d 中未标注杆长L ,质量m ,圆盘半径R ,质量M ,均为均质构件,转动角速度均为w 。 填空题 1.平面任意力系平衡的充分必要条件是力系的( )( )为零。 2.力系向一点简化得到的主矢与简化中心位置( )关,主矩矢一般与简化中心位置( )关。平面一般力系向一点简化可能得到的结果为力系简化为( )、( )或力系平衡。 4.平面汇交力系独立的平衡方程有( )个,空间汇交力系有( )个独立 平衡方程。 5.动点作曲线运动时的全加速度等于( )与( )两者矢量和。 6.已知质点运动方程为22,x t t y t =-+=,式中单位均为国际单位,则2t =秒时质点速度在,x y 轴投影分别为( )( );质点速度大小为( );加速度在,x y 轴投影大小分别为( )( )。 8. 力F 在x 轴上投影Fx=0和力F 对x 轴之矩Mx(F)=0,那么力F 应与( )轴( )并且( )。 9. 力偶矩矢的三个基本要素是( )( )和( )。 10. 直角刚杆AO=2m ,BO=3m ,已知某瞬时A 点的速度V A =4m/s,而B 点加速度与BO 成?=α60角。则该瞬时刚杆的角速度ω=( )rad/s ,角加速度ε=( )rad/s 2。 (a)(b) (c) e f 11.物体保持原有的( )( )状态的性质称为惯性。 12.平面一般力系向一点简化可能得到的结果为力系简化为( )、( )或力系平衡。 13.质心运动定理在空间直角坐标系下的三个投影方程为:( );( );( )。 14.摩擦角是指临界平衡时( )与( )夹角。 15.瞬时平动刚体上各点的速度( );各点加速度一般( )。(填相等、不相等)。 选择题 斜面倾角为30α= ,物块质量为m ,与斜面间的摩擦系数0.5s f =,动滑动摩擦系数 d f = (A ) (B ) (C ) (D)质量为m 压力大小为(A) mg (C ) 点 (t 以厘米计),则点( ) (C)6cm,8cm/s 2 (D) 16cm,8cm/s 2 点的合成运动中的速度合成定理a e r v v v =+ ,适用于哪种类型的牵连运动? (A) 只适用于牵连运动为平动的情况 (B) (C) (D) 楔形块A ,B 自重不计,大小相等,方向相反,(A) A ,B 都不平衡(C) A 平衡, B 不平衡 思 考 题 2-1 设力F 在坐标轴上的投影为X 和Y ,力的作用线上任意点A 的坐标为(x ,y )。证明:yX xY F m -=)(0。 2-2 试计算下列各图中力P 对O 点的矩。 2-3 力偶不能用单独一个力来平衡,为什么图中的轮又能平衡呢? 2-4 四个力作用在同一物体的A 、B 、C 、D 四点(物体未画出),设1P ? 与3P ? 、2P ? 与4P ? 大小相等,方向相反,且作用线互相平行,由该四个力所作的力多边形封闭,试问物体是否平衡?为什么? 2-5 力偶中的两个力,作用与反作用的两个力,二力平衡条件中的两个力,三者间有什么相同点?有什么不同点? 2-6 试用力的平移定理,说明图示力F 和力偶(F '和F '')对轮的作用是否相同?轮轴支承A 和B 的约束反力有何不同?设轮轴静止,F F F 2 1 = ''=',轮的半径为r 。 2-7 从力偶理论知道,力不能用以平衡力偶,但为什么螺旋压榨机(其主要部分如图示)上,力偶(P P ',)却似乎可以用被压榨物体的反力N 来平衡呢?试说明其实质。 思考题2-1图 4 P P 2 3 思考题 2-4 图 思考题2-2图 ( e ) ( f ) ( g ) 习 题 2-1 均质杆AB 重为w ? ,长为l ,在A 点用铰链支承,A 、C 两点在同一铅垂线上,且AB=AC ,绳的一端在杆的B 点,另一端经过滑轮C 与重物Q 相连,试求杆的平衡位置θ。 2-2 铰接四连杆机构12ABO O ,在图示位置平衡,已知cm B O cm A O 60,4012==,作用 在O 2A 上的力偶矩)(11m N m ?=,试求力偶矩2m 的大小,及AB 杆所受力F ? ,各杆重量不计。 2-3 锻锤在工作时,如果锤头所受工件的作用力有偏心,就会使锤头发生偏斜,这样 在导轨上将产生很大的压力,会加速导轨的磨损,影响工件的精度,如已知打击力P =1000kN ,偏心矩e =20mm ,锤头高度h =200mm ,试求锤头给两侧导轨的压力。 2-4 卷扬机结构如图示,重物放在小台车C 上,小台车装有A 、B 轮,可沿垂直导轨ED 上下运动,已知重物Q =2000N ,试求导轨加给A 、B 两轮的约束反力。 2-5 剪切钢筋的机构,由杠杆AB 和杠杆DEO 用连杆CD 连接而成,图上长度尺寸单位是毫米,如在A 处作用一水平力)10(kN P P =? ,试求E 处的臂力Q 为多大? 2-6 曲柄OA 长R =230mm ,当ο20=α,ο2.3=β时达到最大冲击压力P =213t 。因转速较低,故可近似地按静平衡问题计算。如略去摩擦,求在最大冲击压力P 的作用情况下,导轨给滑块的侧压力和曲柄上所加的转矩m ,并求这时轴承O 的反力。 ( a ) F?? 思考题 2-6 图 思考题 2-7 图 题 2-1 图 题 2-2 图 题 2-3 图 1.物体重P=20KN,用绳子挂在支架的滑轮B上,绳子的另一端接在绞D上,如图所示,转动绞,物体便能升起。设滑轮的大小,AB与CD杆自重及摩擦忽略不算,A,B,C三处均为铰链链接。当物体平衡时,求拉杆AB和支杆CB所受的力。 2.在图示刚架的点B作用一水平力F尺寸如图,钢架重量忽略不计,求支座A,D的约束力 Fa和Fd。 3.已知梁AB上作用一力偶,力偶矩为M,梁长为L,梁重不计,求在图a,b,c三种情况下, 支座A,B的约束力。 4.无重水平梁的支撑和载荷如图a,b所示,已知力F,力偶矩M的力偶和强度为q的均布载荷,求支座A,B处的约束力。 5.由AC和CD构成的组合梁通过铰链C链接,它的支撑和受力如图所示,已知均布载荷强度q=10kN/m,力偶矩M=40kN·m,不计梁重,求支座A,B,D的约束力和铰链C处的所受的力。 6.在图示构架中,各杆单位长度的重量为300N/m,载荷P=10kN,A处为固定端,B,C,D,处为铰链,求固定端A处及B,C铰链处的约束力。 7..杆OA长L,有推杆推动而在图面内绕点O转动,如图所示,假定推杆的速度为v,其弯头高为a。求杆端A的速度大小(表示为x的函数)。 8.平底顶杆凸轮机构如图所示,顶杆AB课沿导槽上下移动,偏心圆盘绕轴O转动,轴O 位于顶杆轴线上。工作时顶杆的平底始终接触凸轮表面。该凸轮半径为R,偏心距OC=e,凸轮绕轴O 转动的角速度为w,OC与水平线成夹角φ。当φ=0°时,顶杆的速度。 9.图示铰接四边形机构中,O1A=O2B=100mm,又O1O2=AB,杆O1A以等角速度w=2rad/s绕轴O1转动。杆AB上有一套筒C,此套筒与杆CD相铰接。机构的各部件都在同一铅直面内。求φ=60°时,杆CD的速度和加速度。 . 理论力学---1 1-1. 两个力,它们的大小相等、方向相反和作用线沿同一直线。这是 (A)它们作用在物体系统上,使之处于平衡的必要和充分条件; (B)它们作用在刚体系统上,使之处于平衡的必要和充分条件; (C)它们作用在刚体上,使之处于平衡的必要条件,但不是充分条件; (D)它们作用在变形体上,使之处于平衡的必要条件,但不是充分条件; 1-2. 作用在同一刚体上的两个力F1和F2,若F1 = - F2,则表明这两个力 (A)必处于平衡; (B)大小相等,方向相同; (C)大小相等,方向相反,但不一定平衡; (D)必不平衡。 1-3. 若要在已知力系上加上或减去一组平衡力系,而不改变原力系的作用效果,则它们所作用的对象必需是 (A)同一个刚体系统; (B)同一个变形体; (C)同一个刚体,原力系为任何力系; (D)同一个刚体,且原力系是一个平衡力系。 1-4. 力的平行四边形公理中的两个分力和它们的合力的作用范围 (A)必须在同一个物体的同一点上; (B)可以在同一物体的不同点上; (C)可以在物体系统的不同物体上; (D)可以在两个刚体的不同点上。 1-5. 若要将作用力沿其作用线移动到其它点而不改变它的作用,则其移动范围 (A)必须在同一刚体内; (B)可以在不同刚体上; (C)可以在同一刚体系统上; (D)可以在同一个变形体内。 1-6. 作用与反作用公理的适用范围是 (A)只适用于刚体的内部; (B)只适用于平衡刚体的内部; (C)对任何宏观物体和物体系统都适用; (D)只适用于刚体和刚体系统。 1-7. 作用在刚体的同平面上的三个互不平行的力,它们的作用线汇交于一点,这是刚体平衡的 (A)必要条件,但不是充分条件; (B)充分条件,但不是必要条件; (C)必要条件和充分条件; (D)非必要条件,也不是充分条件。 1-8. 刚化公理适用于 (A)任何受力情况下的变形体; (B)只适用于处于平衡状态下的变形体; (C)任何受力情况下的物体系统; (D)处于平衡状态下的物体和物体系统都适用。 第 5 章点的合成 运动 习题解答0 8 08 1 4 第五章点的合成运动 本章要点 一、绝对运动、相对运动和牵连运动 一个动点, 两个参照系:定系,动系; 三种运动:绝对运动、相对运动和牵连运动, 包括三种速度:绝对速度、相对速度和牵连速度; 三种加速度:绝对加速度、相对加速度和牵连加速度; 牵连点:动参考系上瞬时与动点相重合的那一点称为动参考系上的牵连点。 二、速度合成定理 动点的绝对速度,等于它在该瞬时的牵连速度与相对速度的矢量和,即 V a V e V r 解题要领 1定系一般总是取地面,相对定系运动的物体为动系,动点不能在动系上. 2牵连速度是牵连点的速度? 3速度合成定理中的三个速度向量,涉及大小方向共六个因素,能且只能存在两个未知数方能求解,因此,至少有一个速度向量的大小方向皆为已知的. 4作速度平行四边形时,注意作图次序:一定要先画大小方向皆为已知的速度向量,然后再根据已知条件画上其余两个速度向量,特别注意,绝对速度处于平行四边形的对角线位置. 5用解三角形的方法解速度合成图. 三、加速度合成定理 1牵连运动为平移时的加速度合成定理 当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和,即 a a a e a r , 当点作曲线运动时,其加速度等于切向加速度和法向加速度的矢量和,因此上式还可进一步写成 a;a a a e n t n a e a r a r 其中a;dv;,n a a 2 V a t dV e n ,a e ,a e 2 V e a t ,a r dV r ,a n 2 v ■ ? a, e, r依次 dt a dt e dt r 为绝对轨迹、牵连轨迹和相对轨迹的曲率半径。 解题要领 1牵连运动为平移时的加速度合成定理只对“牵连运动为平移时”成立,因此,判定牵连运动是否为平移至关重要. 2牵连运动为平移时的加速度合成定理涉及的三个加速度,每一加速度都可能有切 向和法向加速度。但是,法向加速度只与速度有关,因此,可以通过速度分析予以求解,从而在此处是作为已知的。剩下的三个切向加速度的大小方向共有六个因素,能且只能有2个未知量时方可求解。 3因加速度合成定理涉及的矢量较多,一般不用几何作图的方法求解,而是列投影式计算,千万不能写成“平衡方程”的形式。 4在加速度分析中,因动点和动系的选择不当而出现了一种似是而非的分析过程。 教材中例5.3.5的一个典型错误解法如下: 例:半径为r的半圆凸轮移动时,推动靠在凸轮上的杆0A绕0轴转动,凸轮底面直径DE的延长线通过0点,如图所示。若在30的图示瞬时位置,已知凸轮 向左的移动速度为u,加速度为a且与u反向,求此瞬时0A杆的角速度与角加速度。 理论力学题库2-2-10 问题: [单选]图示杆件AB长2m,B端受一顺时针向的力偶作用,其力偶矩的大小m=100N·m,杆重不计,杆的中点C为光滑支承,支座A的反力FA的大小和方向为:() A.FA=200N,方向铅直向下 B.FA=115.5N,方向水平向右 C.FA=173.2N,方向沿AB杆轴线 D.FA=100N,其作用线垂直AB杆,指向右下方 问题: [单选]图示力P的大小为2kN,则它对点A之矩的大小为:() A.['mA(P)=20kN·m B.mA(P)=10kN·m C.mA(P)=10kN·m D.mA(P)=5kN·m 问题: [单选]已知图示绕在鼓轮上的绳子的拉力大小T=200N,其作用线的倾角为60°,r1=20cm,r2=50cm,则力T对鼓轮与水平面的接触点A之矩为:() A.mA(T)=-50N·m(顺时针方向) B.mA(T)=-30N·m(顺时针方向) C.mA(T)=-10N·m(顺时针方向) D.mA(T)=20N·m(逆时针方向) (牌九游戏技巧 https://www.doczj.com/doc/1a4957185.html,) 问题: [单选]在图示结构中,如果将作用于构件AC上的力偶m搬移到构件BC上,则A、B、C三处的反力有什么变化()? A.都不变 B.A、B处反力不变,C处反力改变 C.都改变 D.A、B处反力改变,C处反力不变 m在AC上时,BC为二力构件,而m在BC上时,AC为二力构件。 问题: [单选]力P作用在BC杆的中点,且垂直BC杆。若P=kN,杆重不计。则杆AB内力S的大小为:() A.1kN B.0.5kN C.1.414kN D.2kN 理论力学题库——第五章 一、填空题 1.限制力学体系中各质点自由运动的条件称为。质点始终不能脱 离的约束称为约束,若质点被约束在某一曲面上,但在某一方 向上可以脱离,这种约束称为约束。 2.受有理想约束的力学体系平衡的充要条件是,此即原 理。 3.基本形式的拉格朗日方程为,保守力系的拉格朗 日方程为。 4.若作用在力学体系上的所有约束力在任意虚位移中所作的虚功之和为 零,则这种约束称为约束。 5.哈密顿正则方程的具体形式是和。 5-1. n个质点组成的系统如有k个约束,则只有3n - k个坐标是独立的. 5-2.可积分的运动约束与几何约束在物理实质上没有区别,合称为完整约束. 5-3自由度可定义为:系统广义坐标的独立变分数目,即可以独立变化的坐标变更数. 5-4.广义坐标就是确定力学体系空间位置的一组独立坐标。 5-5.虚位移就是假想的、符合约束条件的、无限小的、即时的位置变更。 5-6.稳定约束情况下某点的虚位移必在该点曲面的切平面上。 5-7.理想、完整、稳定约束体系平衡的充要条件是主动力虚功之和为零. 5-8.有效力(主动力+ 惯性力)的总虚功等于零。 5-9.广义动量的时间变化率等于广义力(或:主动力+拉氏力)。 5-10.简正坐标能够使系统的动能和势能分别用 广义速度 和 广义坐标 的平方项表示。 5-11.勒让德变换就是将一组 独立 变数变为另一组 独立 变数的变换。 5-12.勒让德变换可表述为:新函数等于 不要的变量 乘以原函数对该变量的偏微商的 和 ,再减去 原函数。 5-13.广义能量积分就是 t 为循环坐标时的循环积分。 5-14. 泊松定理可表述为:若21),,(,),,(c t p q c t p q ==ψ?是正则方程的初积分,则 []3c ,=ψ? 也 是正则方程的初积分. 5-15.哈密顿正则方程的泊松括号表示为: ],[H p p αα= ; ],[H q q αα= 。 5-16.哈密顿原理可表述为:在相同 始终 位置和 等时 变分条件下,保守、完整力系所可能做的 真实运动是 主函数 取极值. 5-17.正则变换就是 使正则方程 形式不变的广义坐标的变换。 5-18.正则变换目的就是通过正则变换,使新的H * 中有更多的 循环坐标 。 5-19. 哈密顿正则方程为:ααp H q ??= ;α αq H p ??-= 。 5-20. 哈密顿正则变换的数学表达式为:∑-??=s L q L q t q p H 1 ),,(α α 。 二、选择题 5-1. 关于广义坐标的理解,下列说法正确的是: 【B 】 A 广义坐标就是一般的坐标; B 广义坐标可以是线量,也可以是角量; C 一个系统的广义坐标数是不确定的; D 系统广义坐标的数目一定就是系统的自由度数 5-2. 关于自由度数目的理解,下列说法正确的是: 【B 】 A 系统的自由度数目就是系统的独立的一般坐标的数目;理论力学合成运动习题解
理论力学题库(含答案)---1
理论力学模拟试题2答案(1)
点的合成运动习题解答
理论力学到题库及答案
(完整版)《理论力学》试题库
2014理论力学复习题
第5章点的合成运动习题解答
理论力学习题
《理论力学》第七章点的合成运动习题解
《理论力学》测试试题库
最新理论力学题库(含答案)---1
理论力学考试的试题
理论力学练习题2
理论力学复习题
理论力学题库(含答案)---
第5章点的合成运动习题解答080814讲课稿
理论力学题库2-2-10
理论力学题库第五章
相关主题
文本预览