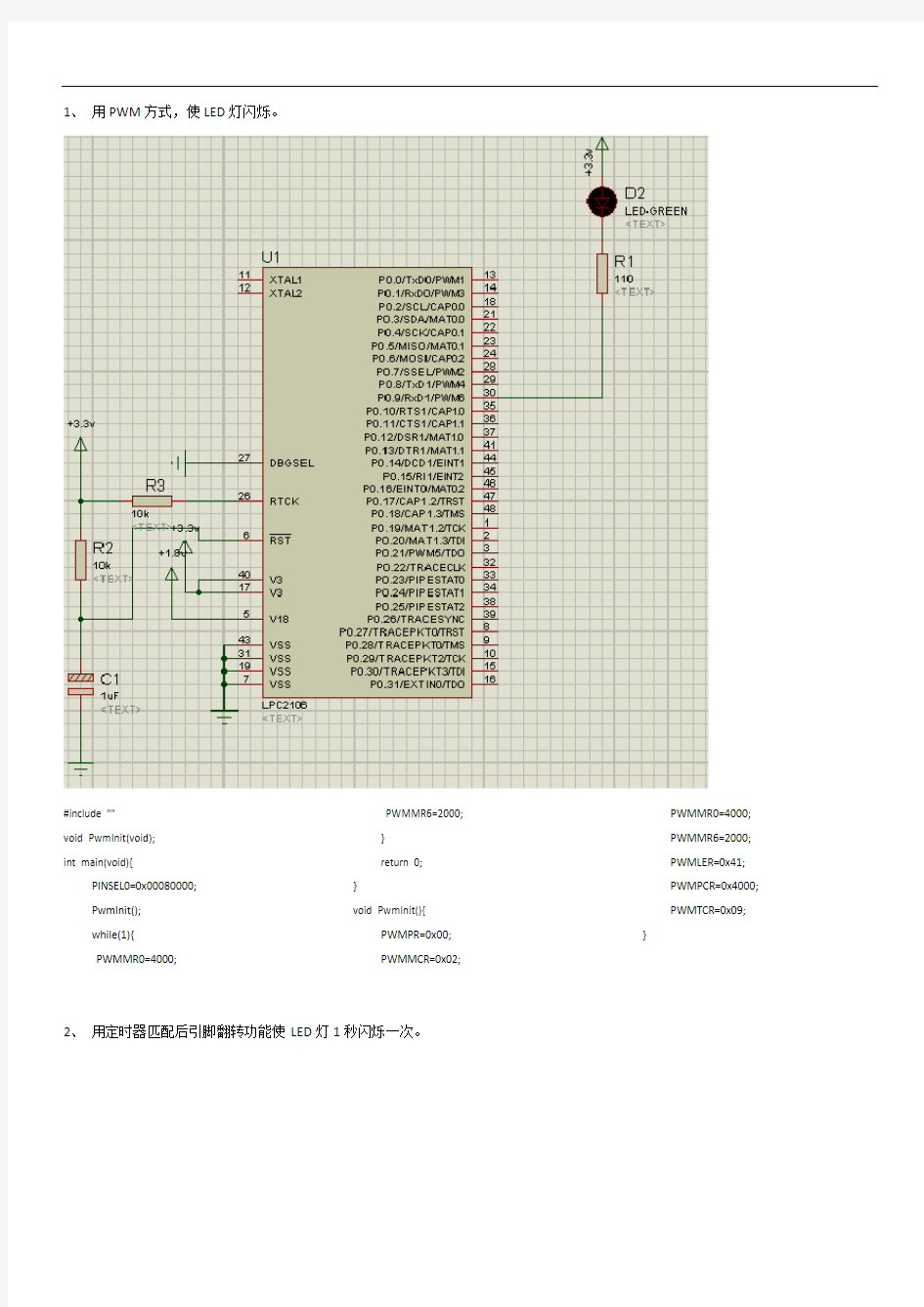

1、用PWM方式,使LED灯闪烁。
#include ""
void PwmInit(void);
int main(void){
PINSEL0=0x00080000;
PwmInit();
while(1){
PWMMR0=4000;
PWMMR6=2000;
}
return 0;
}
void PwmInit(){
PWMPR=0x00;
PWMMCR=0x02;
PWMMR0=4000;
PWMMR6=2000;
PWMLER=0x41;
PWMPCR=0x4000;
PWMTCR=0x09;
}
2、用定时器匹配后引脚翻转功能使LED灯1秒闪烁一次。
#include ""
#define LED 1<<3 void __irq IRQ_Time0(){ while((T0IR&0x01)==0);
T0IR=0x01;
VICVectAddr=0x00;
}
void Time0Init(){
T0PR = 99;
T0MCR = 0x03;
T0MR0 = 110592/4;
T0TCR = 0x03;
T0TCR = 0x01;
T0EMR=0X30;
VICIntSelect = 0x00;
VICVectCntl0 = 0x24;
VICVectAddr0 = (uint32)IRQ_Time0;
VICIntEnable = 0x00000010;
}
int main(){
PINSEL0 = 0x00000080;
IOCLR=LED;
Time0Init();
while(1);
return 1;
}
3、上位机发送一个数字字符给下位机(1-8),下位机接受到这个字符若为“1”,则点亮一盏灯,“2”点亮2盏灯。。。。。。。“8”点亮8
盏灯。
4、设外部中断为FIQ快速中断,按键按下,灯的亮灭状态改变。
/*
*注意:需要在中添加EXTMODE和EXTPOLAR寄存器*/
#include ""
#define LED 0x01
void __irq IRQ_SPR()
{
if((IOPIN&0X01)==0)
IOSET=0X01;
else
IOCLR=0X01;
while((EXTINT&0X02)!=0)
EXTINT=0x02;}
//中断初始化
void EINT_init(){
PINSEL0=0X;//选择为中EINT1,为GPIO
VICIntSelect=/*~*/(1<<15);//设置EINT1为
FIQ中断
VICIntEnable=(1<<15);//EINT1中断使能,
开中断
EXTINT=0x02;//清中断
}
int main(){
EINT_init();
IODIR=LED;//为输出,其余为输入
IOSET=LED;//开始不显示
while(1);
return 0;
}
修改头文件
修改lpc2016
1)在#define MAMTIM (*((volatile unsigned char *) 0xE01FC004))//定时控制添加:
#define EXTMODE (*((volatile unsigned char *) 0xE01FC148))
#define EXTPOLAR (*((volatile unsigned char *) 0xE01FC14C))
2)添加lcd1602
3)修改
void FIQ_Exception(void) {
if((IOPIN&0X01)==0)
IOSET=0X01;
else
IOCLR=0X01;
while((EXTINT&0X02)!=0)
EXTINT=0x02;
// while(1); // 这一句替换为自己的代码}
4) 修改文件将5f 改成9f
5、外部中断,通过1个按键使8个发光二极管二进制显示加法。#include ""
#define LED 0x000000FF //设置p0引脚typedef unsigned int uint32;
uint32 counter=0;
void __irq IRQ_Eint1(void){ //加法counter++;
IOSET=LED;
IOCLR=counter;
while((EXTINT&0x02)!=0){
EXTINT=0x02;
}
VICVectAddr=0;
}int main(void)
{
PINSEL0 = 0x;
IODIR = LED;
IOSET=LED;
IOCLR=counter;
VICIntSelect=0;
VICIntEnable=0x00008000;
VICVectCntl1=0x2F;
VICVectAddr1=(int)IRQ_Eint1;
while (1) ;
}
6、用单边沿、双边沿两种方式输出两路脉冲信号,要求占空比为50%,显示在同一个示波器上;
#include ""
void PWM_Init(){
PWMPR=0x00;
PWMMCR=0x02;
PWMMR0=4000;
PWMMR1=1000;
PWMMR2=3000;
PWMMR3=2000;
PWMLER=0x0F;
PWMPCR=0x0C04;
PWMLER=0X0F;
PWMTCR=0x09;
}
int main(){
PINSEL0=0X00008008;
PWM_Init();
while(1){
PWMMR0=4000;
PWMMR1=1000;
PWMMR2=3000;
PWMMR3=2000;
}
return 0;
}
7、用延时方法,使共阳数码管静态循环显示0—F。7seg-com-an-grn
#include ""
#define LED 0X7F
void delayNS(uint32 xms) {
int i,j;
for(i=xms;i>0;i--)
for(j=5000;j>0;j--); }
uint32 dis_tab[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7
d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int main(){
int i;
PINSEL0=0;
IODIR=LED;
while(1)
for(i=0;i<16;i++)
{
IOSET=0xff;
IOCLR=dis_tab[i];
delayNS(280);
}
return 0;
}
8、8位共阴数码管动态显示。
#include""
#define uchar unsigned char
#define uint unsigned int
#define CS 0xFEFF
void delay(uint xms){
uint i,j;
for (i=xms;i>0;i--)
for(j=110;j>0;j--) ; }int main(void){
const uint
a[8]={0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0xff};
PINSEL0 = 0x00000000;
PINSEL1 = 0x00000000;
IODIR = 0xFFFF;
while (1){
uchar i;
for (i=0;i<8;i++){
IOSET = (CS< delay(20); IOCLR = 0xFFFF; } } return 0; } 9、使用中断,2按键,2灯。不同按键控制不同灯,按键按下,所控制的灯的状态改变。 修改头文件 1)在#define MAMTIM (*((volatile unsigned char *) 0xE01FC004))//定时控制 添加: #define EXTMODE (*((volatile unsigned char *) 0xE01FC148)) #define EXTPOLAR (*((volatile unsigned char *) 0xE01FC14C)) #include "" #define d1 1<<0//第一盏灯 #define d2 1<<1//第二盏灯 //EINT1的中断服务程序 void __irq EINT1_ISR() { if((IOPIN&d1)==0x0) IOSET=d1; else IOCLR=d1; while((EXTINT&0X02)!=0)//产生中断要清中断 EXTINT=0x02; } //EINT2的中断服务程序 void __irq EINT2_ISR() { if((IOPIN&d2)==0x0) IOSET=d2; else IOCLR=d2; while((EXTINT&0X04)!=0) EXTINT=0x04; } //中断初始化 void EINT_init() { PINSEL0=0XA0000000;//选择,为中EINT1, EINT2,,为GPIO EXTMODE|=0X06;//- ,0110,跳沿触发 EXTPOLAR|=0x09;//-,1001,下跳沿触发 VICIntSelect&=~0x00018000;//设置EINT1, 2为IRQ中断 VICVectCntl1=0x20|15;//EINT1分配为向 量IRQ中通道1,b5=1 VICVectCntl2=0x20|16;//EINT2分配为向 量IRQ中通道2,b5=1 VICVectAddr1=(uint32)EINT1_ISR;//EINT1 的中断服务程序 VICVectAddr2=(uint32)EINT2_ISR;//EINT2 的中断服务程序 VICIntEnable=0x00018000;//EINT1,2中断 使能,开中断 EXTINT=0x0f;//清中断 } int main() { EINT_init(); IODIR=d1|d2;//,为输出,其余为输入 IOSET=d1|d2;//开始不显示 while(1); return 0; } 10、以中断方式,控制两个数码管显示数字,三个按键,每个按键分别控制数字的加、减和清零。 #include "" #define LED 0x000000ff uint32 temp=0; //加法 void __irq IRQ_Eint0() { temp=VICIRQStatus; temp=IOSET; temp++; if((temp&0x000f)>=10) temp+=6; //个位大于9进位,改0 if((temp&0x00ff)>0x99) temp+=0x060;//十位大于9进位,改0 IOCLR=LED; IOSET=temp; while((EXTINT&0x01)!=0) EXTINT=0x01; VICVectAddr=0x00; } //清零 void __irq IRQ_Eint1() { temp=VICIRQStatus; IOCLR=LED; IOSET=0; while((EXTINT&0x02)!=0) EXTINT=0x02; VICVectAddr=0x00; } //减法 void __irq IRQ_Eint2() { temp=VICIRQStatus; temp=IOSET; temp--; if((temp&0x000f)==0xf)//temp--,个位出现f,执行下边操作 temp&=0xf9; //个位f-9-,十位保留 if((temp&0x00f0)==0xf0)//temp--,十位出现f,执行下边操作 temp&=0x9f;//十位f--9,个位保留 IOCLR=LED; IOSET=temp; while((EXTINT&0x04)!=0) EXTINT=0x04; VICVectAddr=0x00;} void EXTINT_Init() { VICIntSelect=0x00000000; VICVectCntl0=0x2e; VICVectAddr0=(int)IRQ_Eint0; VICVectCntl1=0x2f; VICVectAddr1=(int)IRQ_Eint1; VICVectCntl2=0x30; VICVectAddr2=(int)IRQ_Eint2; VICIntEnable=0x0001c000; EXTINT=0x07; } int main() { PINSEL0=0xa0000000; PINSEL1=0x00000001; EXTINT_Init(); IODIR=LED; IOCLR=LED; while(1); return 0; } 11、以GPIO的方式控制LCD1602输出两行,第一行显示邮箱,第二行显示电话号 #include "" #define rs (1<<8) #define rw (1<<9) #define en (1<<10) #define busy (1<<7) uint8 txt1[]={""}; uint8 txt2[]={""}; void CheckBusy() {IODIR=0x700; while(1) { IOCLR=rs; IOSET=rw; IOSET=en; if(!(IOPIN & busy))break; IOCLR=en; } IODIR=0x7ff; } void WrOp(uint8 dat) { CheckBusy(); IOCLR=rs; //全部清零 IOCLR=rw; IOCLR=0xff; //先清零 IOSET=dat; //再送数 IOSET=en; IOCLR=en; } void WrDat(uint8 dat) { CheckBusy(); IOSET=rs; IOCLR=rw; IOCLR=0xff; //先清零 IOSET=dat; //再送数 IOSET=en; IOCLR=en; } void DisText(uint8 addr,uint8 *p) { WrOp(addr); while(*p !='\0')WrDat(*(p++)); } int main(void) { lcd_init(); IODIR=0x7ff; //设置为输出 IOCLR=0x7ff; DisText(0x80,txt1); DisText(0xc3,txt2); while(1); } 12、以I2C的方式,用数码管显示开机次数。 #include "" #include "" #define EEPROM 0xA0 void DelayNS(uint32 dly); void Display(uint8 num); uint8 data_buf[1]; int main() { PINSEL0 |=0x0000FFFF; IODIR |= 0x0000FF00; I2C_Init(100000);//初始化 IRcvStr(EEPROM,0x00,data_buf,1);//读出EEPROM 0x00处的数据 if(data_buf[0]==0xff) data_buf[0] = 0; if(data_buf[0]>9) data_buf[0] = 0; Display(data_buf[0]+1); data_buf[0]++; ISendStr(EEPROM,0x00,data_buf,1);//写入 数据到EEPROM 0x00 while(1); return 0; } void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<50000; i++); } void Display(uint8 num) { switch(num) { case 0: //"0" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x3F<<8; break; case 1: //"1" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000006<<8; break; case 2: //"2" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000005B<<8; break; case 3: //"3" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000004F<<8; break; case 4: //"4" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000066<<8; break; case 5: //"5" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000006D<<8; break; case 6: //"6" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000007D<<8; break; case 7: //"7" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000007<<8; break; case 8: //"8" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000007F<<8; break; case 9: //"9" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000006F<<8; break; case 10: //"A" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000077<<8; break; case 11: //"B" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000007C<<8; break; case 12: //"C" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000039<<8; break; case 13: //"D" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x0000005E<<8; break; case 14: //"E" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000079<<8; break; case 15: //"F" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000071<<8; break; default: //"off" IOCLR |= (IOCLR & 0xFFFF00FF)|(0xFF<<8); IOSET |= 0x00000000<<8; break; } } 13、利用PWM和按键,实现按键按下,脉宽增加的功能。 #include "" #define KEY1 0x00004000 /*引脚连接KEY1*/ void WaitKey() { uint32 i; while(1) { while((IOPIN&KEY1)!=0); for(i=0;i<50;i++); if((IOPIN&KEY1)==0)break; } while((IOPIN&KEY1)==0); } void init(){ PWMPR=0x00; PWMMCR=0x02; PWMMR0=4000; PWMMR6=1000; PWMLER=0x41; PWMPCR=0x4000; PWMTCR=0x09; } int main() { uint32 pwmdata; PINSEL0=0x00080000; PINSEL1=0x00000000; init(); pwmdata=1000; while(1) { PWMMR0=4000; PWMMR6=pwmdata; PWMLER=0x41; WaitKey(); pwmdata+=100; if(pwmdata>=4000) pwmdata=0; } return 0; } 14、利用数码管显示8个按键的按键序号,例如:第一个按键按下显示“1”,第二个按键按下显示“2”,以此类推。 #include "" #define key (0xff<<8) typedef unsigned int uint; /* *延时函数 */ void delay(uint xms) { uint i,j; for(i=xms;i>0;i--) for(j=110;j>0;--j); } /* *判断按键 */ void waitkey() { if((IOPIN&key)!=key)//判断有键按下 { delay(1000);//延时去抖 if((IOPIN&key)!=key)//再次判断按键 { IOCLR=0x000000ff;//清0 switch(IOPIN&key) { case 0x0000fe00://键1 IOSET=0x00FF06; break; case 0x0000fd00:////键2 IOSET=0x00FF5b; break; case 0x0000fb00:////键3 IOSET=0x000FF4f; break; case 0x0000f700:////键4 IOSET=0x00FF66; break; case 0x0000ef00:////键5 IOSET=0x00FF6d; break; case 0x0000df00:////键6 IOSET=0x00FF7d; break; case 0x0000bf00:////键7 IOSET=0x0000FF07; break; case 0x00007f00:////键8 IOSET=0x0000FF7f; break; } } while((IOPIN&key)==key);//等待按键抬起 } } int main() { PINSEL0=0x0;//GPIO功能 IODIR=0x000000FF;//输入输出 while(1) { waitkey(); } return 0; } 15、利用WDT,控制LED1--LED4显示输出。程序先对LED1--LED4闪烁3次,并进行喂狗处理;然后只点亮LED1,并进入死循环,等待WDT复位; #include "" #define LEDCON 0x0000000f void WdtFeed(void) { WDFEED = 0xAA; WDFEED = 0x55; } void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) { for(i=0; i<1000; i++)WdtFeed(); } } int main(void) { uint8 i; IODIR = LEDCON; WDTC = ; WDMOD = 0x03; WdtFeed(); for(i=0; i<3; i++) { IOSET = 0x0000000f; DelayNS(100); IOCLR = 0x0000000f; DelayNS(100); } IOSET = 0x0000000f; IOCLR = 0x00000001; while(1); return(0); } 16、以定时器的方式,使数码管从0—9循环显示,每一秒改变一次。#include "" #define LED 0x7f int dis_tab[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7 d,0x07,0x7f,0x6f}; int i=0; void __irq IRQ_Time0() { while((T0IR&0x01)==0); IOCLR=0XFF; IOSET=dis_tab[(++i)%10]; T0IR=0x01; VICVectAddr=0x00; } void Time0Init() { T0PR = 99; T0MCR = 0x03; T0MR0 = 110592/4; T0TCR = 0x03; T0TCR = 0x01; VICIntSelect = 0x00; VICVectCntl0 = 0x24; VICVectAddr0 = (uint32)IRQ_Time0; VICIntEnable = 0x00000010; } int main() { PINSEL0 = 0x00000000; IODIR = LED; IOSET = 0X3F; Time0Init(); while(1); return 1; } 17、利用SPI和HC595,控制数码管0-F显示。 #include "" #define HC595_CS 0x00000100 void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<5000; i++); } void MSpiIni(void) { S0SPCCR = 0x52; S0SPCR = 0x30; } uint8 MSendData(uint8 data) { IOCLR = HC595_CS; S0SPDR =data; while( 0==(S0SPSR&0x80) ); IOSET = HC595_CS; return (S0SPDR); } uint8 const DISP_TAB[16] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; uint8 rcv_data; int main(void) { uint8 i; PINSEL0 = 0x00005500; PINSEL1 = 0x00000000; IODIR = HC595_CS; MSpiIni(); while(1) { for(i=0; i<16; i++) { rcv_data = MSendData(DISP_TAB[i]); DelayNS(300); } } return(0); } 修改添加 #define S0SPCR (*((volatile unsigned char *) 0xE0020000)) #define S0SPSR (*((volatile unsigned char *) 0xE0020004)) #define S0SPDR (*((volatile unsigned char *) 0xE0020008)) #define S0SPCCR (*((volatile unsigned char *) 0xE002000C)) #define S0SPINT (*((volatile unsigned char *) 0xE002001C)) #define S1SPCR (*((volatile unsigned char *) 0xE0030000)) #define S1SPSR (*((volatile unsigned char *) 0xE0030004)) #define S1SPDR (*((volatile unsigned char *) 0xE0030008)) #define S1SPCCR (*((volatile unsigned char *) 0xE003000C)) #define S1SPINT (*((volatile unsigned char *) 0xE003001C)) 18、利用SPI和HC595,使流水灯亮,亮的方式为:从上往下——从下往上——灭——闪两下——往中间跑——交叉闪亮。 #include "" #define HC595_CS 0x00000100 void DelayNS(uint32 dly) { uint32 i; for (;dly>0;dly--) for(i=0;i<50000;i++); } void MSpiIni(void) { S0SPCCR=0x52; S0SPCR=0x30; } uint8 MSendData(uint8 data) { IOCLR=HC595_CS; S0SPDR=data; while(0==(S0SPSR&0x80)); IOSET=HC595_CS; return(S0SPDR); } uint8 DISP_TAB[33]={0x01,0x02,0x04,0x08,0x10,0x20,0 x40,0x80, 0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01, 0x00,0xFF,0x00,0xFF,0x00, 0x18,0x24,0x42,0x81, 0x01,0x04,0x10,0x40, 0x02,0x08,0x20,0x80 }; int main(void) { uint8 rcv_data; uint8 i; PINSEL0=0x00005500; PINSEL1=0x00000000; IODIR=HC595_CS; MSpiIni(); rcv_data=MSendData(0); while(1) { for (i=0;i<33;i++) {rcv_data=MSendData(DISP_TAB[i]); DelayNS(20); } } return(0); } 修改添加 #define S0SPCR (*((volatile unsigned char *) 0xE0020000)) #define S0SPSR (*((volatile unsigned char *) 0xE0020004)) #define S0SPDR (*((volatile unsigned char *) 0xE0020008)) #define S0SPCCR (*((volatile unsigned char *) 0xE002000C)) #define S0SPINT (*((volatile unsigned char *) 0xE002001C)) #define S1SPCR (*((volatile unsigned char *) 0xE0030000)) #define S1SPSR (*((volatile unsigned char *) 0xE0030004)) #define S1SPDR (*((volatile unsigned char *) 0xE0030008)) #define S1SPCCR (*((volatile unsigned char *) 0xE003000C)) #define S1SPINT (*((volatile unsigned char *) 0xE003001C)) 19、通过UART端口向上位机(模拟终端)发送考生名字的拼音。 #include "" void DelayNS(uint32 dly) { uint32 i; for(;dly>0;dly--) for(i=0;i<50000;i++); } void UART0_Ini(void) { U0LCR=0x83; U0DLL=0x12; U0DLM=0x00; U0LCR=0x03; } void UART0_SendByte(uint8 data) { U0THR=data; while((U0LSR&0x40)==0); } void UART0_SendStr(uint8 const *str) { while(1) { UART0_SendByte(*str++); if(*str=='\0') { UART0_SendByte('\r'); UART0_SendByte('\n'); break; } } } int main(void) { uint8 const SEND_STRING[]="zhangyunan!\n"; PINSEL0=0x00000005; PINSEL1=0x00000000; UART0_Ini(); UART0_SendStr(SEND_STRING); DelayNS(10); } 20、利用UART串口,完成一个字符串的写入和回写功能,要求每4个字符触发一次,返回刚才写入
相关主题
文本预览