本文1998年2月25日收到
设计分析
无传感器无刷直流电机三段式起动技术的深入分析
沈建新
吕晓春 杜军红 陈永校
(南洋理工大学 新加坡)
(浙江大学 杭州310027)
Detail Analyses of 3-step Start for SLBLDC Motor Shen J ianxin
Lu ··
X iaoc hun Du Junhong Chen Yongx iao
(Nanyang Technological Univ ersity ,Singa po re)
(Zhejiang Univ ersity,H a ng zho u 310027) 【摘 要】 反电势法无位置传感器无刷直流电机常常采用三段式起动技术。本文分析其加速和切换过程中确保电机不失步的各自条件,并用仿真与实验手段加以验证。
【关键词】 无刷直流电机 反电势 起动
【Abstract 】 A 3-step sta rt technique is usually ap-plied to a po sition -senso rless br ushless D C (SLBL DC)mo tor w ith back EM F me tho d.T his paper analy zes the conditio ns to prev ent the mo to r fr om lo sing -step during the accele rating step a nd th e sta te-changing step.Simula-tio n and ex perimenta l r esults a re also presented to v erify the analyses.
【Keywords 】
br ushless D C mo to r back EM F sta rt 1引 言
传统永磁无刷直流电机的位置传感器带来诸多不利影响
[1~3]
,因此,长期以来国内外研究开发
了无刷直流电机的多种无传感器控制技术,其中最简单而实用的方法是基于反电势检测。由于无刷直流电机只需要转子的若干个关键位置信号,而某相绕组的反电势(即旋转电势、发电机电势)由正变负或由负变正而过零时,转子的直轴必与该相绕组的轴线重合。所以,只要测出各相反电势的过零点就可获得三相电机所需的转子六个关键位置信号。这类方法统称为反电势法。据此原理,利用无源滤波器、比较器等硬件电路(按惯例称作转子位置检测器)可间接地从电机的端电压波形检测反电势的过零点[2,4]
,其输出的三路数字信号就是在相位上互差120°的转子位置信号,分别用CPA 、CPB 、CPC 表示,用以编码产生逆变器触发信号。正常情况下,三路转子位置信号只有六种组合状态,并对应六种
逆变状态。逆变状态每发生变化的时刻,也是转子处于某个关键位置的时刻。
目前反电势法还存在不少问题。然而,正是因为反电势法的简单、容易实现,国内外文献并未对存在的问题作深入的研究。同样的原因,现存问题的解决将有利于反电势法的进一步推广实用。本文将着重分析反电势法无传感器无刷直流电机的三段式起动技术,通过仿真、实验等手段解决在重载条件下常常不能顺利起动的问题。
2三段式起动技术
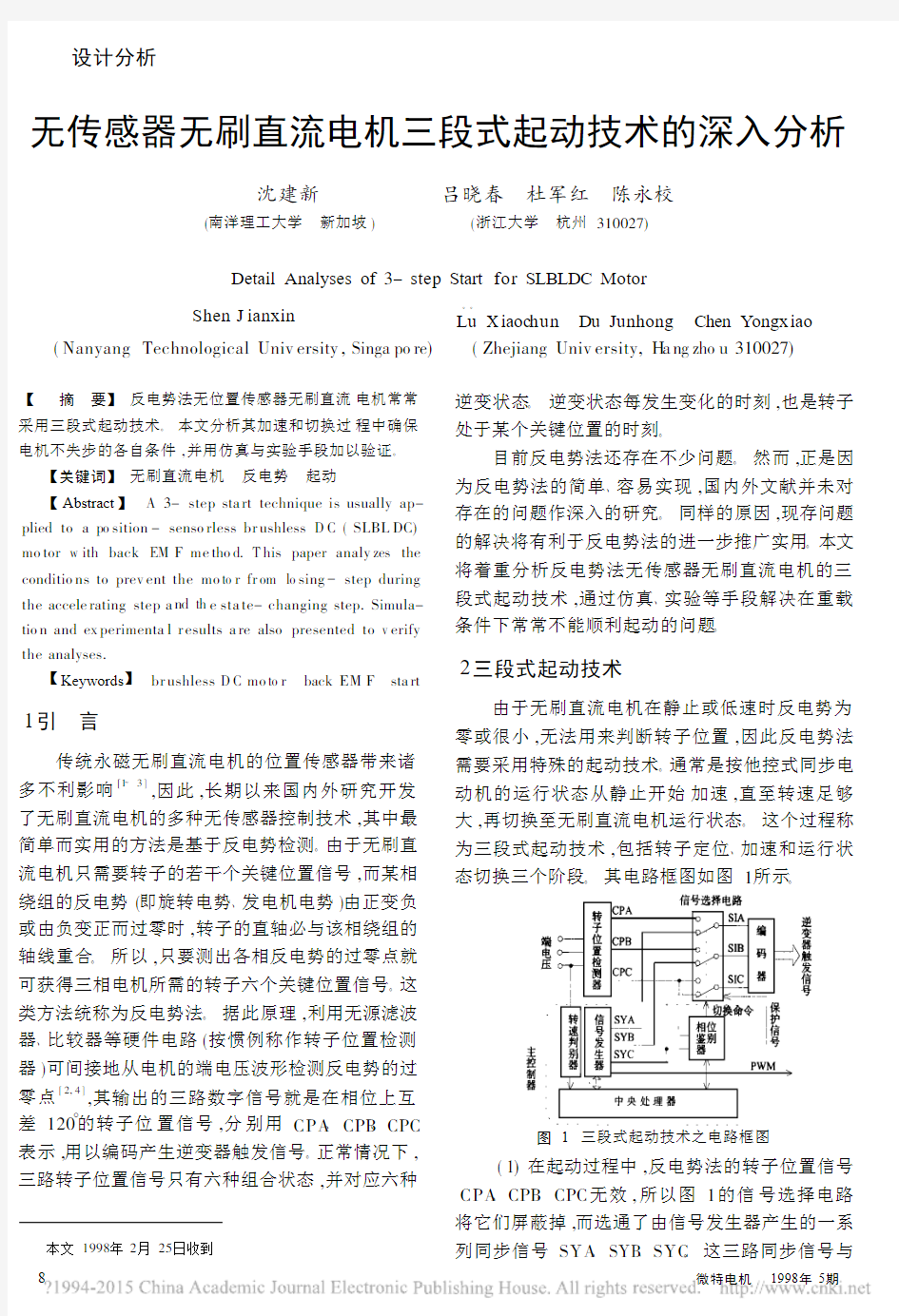
由于无刷直流电机在静止或低速时反电势为零或很小,无法用来判断转子位置,因此反电势法需要采用特殊的起动技术。通常是按他控式同步电动机的运行状态从静止开始加速,直至转速足够大,再切换至无刷直流电机运行状态。这个过程称为三段式起动技术,包括转子定位、加速和运行状态切换三个阶段。其电路框图如图1所示
。
图1 三段式起动技术之电路框图
(1)在起动过程中,反电势法的转子位置信号CPA 、CPB 、CPC 无效,所以图1的信号选择电路将它们屏蔽掉,而选通了由信号发生器产生的一系列同步信号SYA 、SYB 、SYC 。这三路同步信号与
三路转子位置信号一一对应,它们被选通送入编码器用以产生逆变器的触发信号。
(2)与转子位置信号类似,三路同步信号只有六种组合状态。如果先将同步信号某个组合状态保持一段时间,再按序改变其组合状态并逐步提高频率,那么,只要外施电源适当,就可以先将电机转子定位到某一预知位置,再按他控式同步电动机的运行方式由静止开始加速。当转速足够大后,转子位置信号有效,图1的相位鉴别器发出切换命令,使得信号选择电路屏蔽掉同步信号,转而选通转子位置信号并送入编码器用以产生逆变器的触发信号,这样建立了转子位置闭环,也就完成了从他控式同步电动机运行状态到无刷直流电机运行状态的切换。
(3)图1中信号发生器的另一功能是产生PWM信号,调节电机的外施电压。
(4)保护信号有效时,逆变器所有功率器件都关断,以实现各种保护措施。
(5)转速判别器在开机时先根据电机端电压的幅值及频率来判别电机原始转速。若足够大,就跳过三段式起动过程而直接采用反电势法控制无刷直流电机。
(6)图1的中央处理器用以协调信号发生器、相位鉴别器以及转速判别器这三个功能模块动作,此四者共同构成主控制器。
3定位与加速
电机转子静止时的初始位置决定了逆变器第一次应触发哪两个功率器件。与其用很复杂的方法检测转子的初始位置,不如先把逆变器的某两相导通并控制电机电流,经过一定时间后使转子转到一个预知的位置。这个过程称为定位,是容易实现的。之后电机加速,在加速过程的第一个逆变状态期间,电机定子磁势与转子直轴的夹角应小于180电角度,转子才能按期望的方向旋转。仿真研究表明[5]:该夹角在60~180电角度范围内取不同值,对后续的整个加速过程影响很小。
加速时,信号发生器按序改变三路同步信号的组合状态,并且各组合状态所保持的时间逐渐缩短,同时通过PW M控制逐渐提高电机外施电压,那么在电机不失步的前提下转子转速也逐渐提高。信号发生器预先设定和要求的转子转速理想变化规律称为加速曲线。
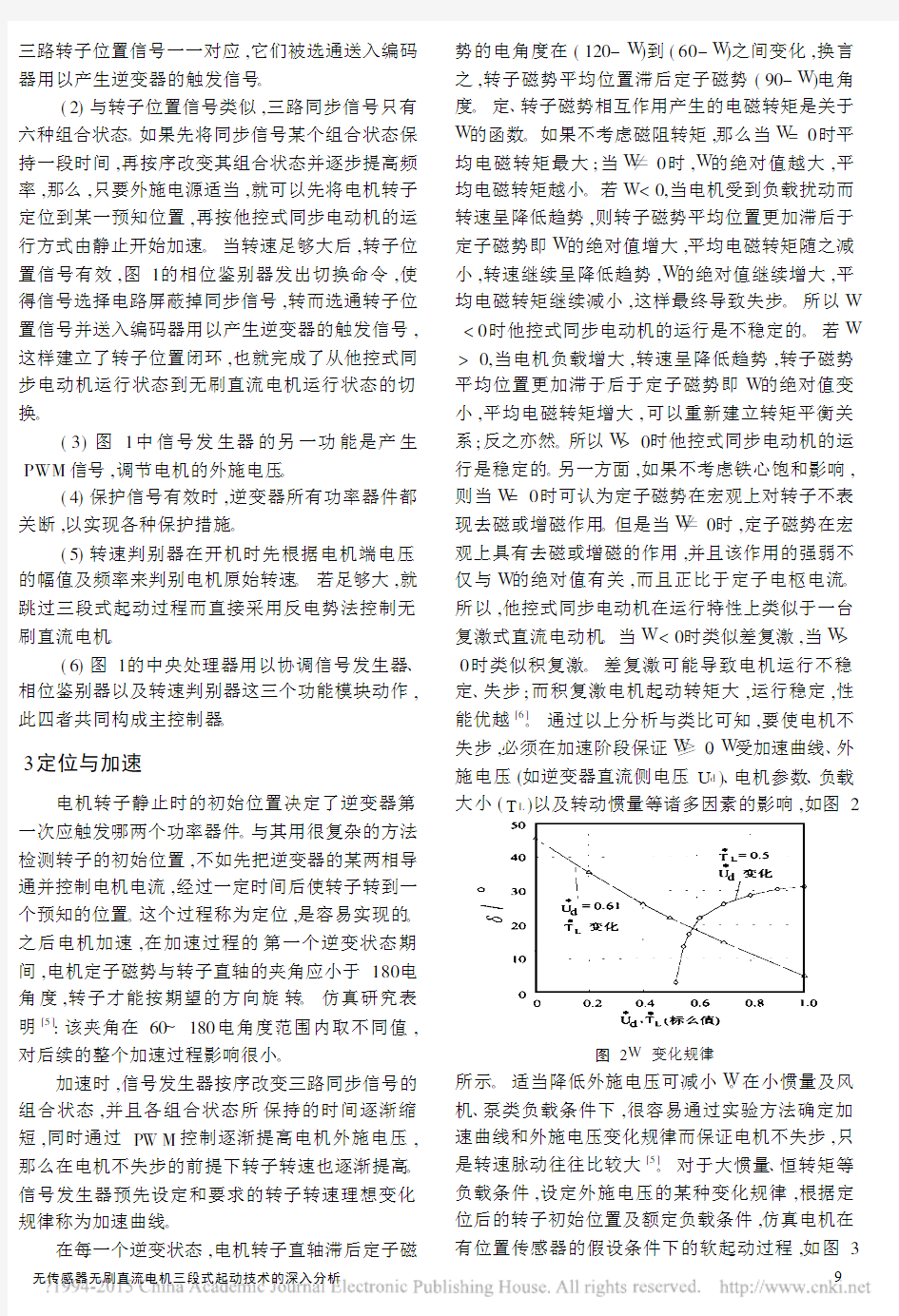
在每一个逆变状态,电机转子直轴滞后定子磁势的电角度在(120-W)到(60-W)之间变化,换言之,转子磁势平均位置滞后定子磁势(90-W)电角度。定、转子磁势相互作用产生的电磁转矩是关于W的函数。如果不考虑磁阻转矩,那么当W=0时平均电磁转矩最大;当W≠0时,W的绝对值越大,平均电磁转矩越小。若W<0,当电机受到负载扰动而转速呈降低趋势,则转子磁势平均位置更加滞后于定子磁势即W的绝对值增大,平均电磁转矩随之减小,转速继续呈降低趋势,W的绝对值继续增大,平均电磁转矩继续减小,这样最终导致失步。所以W <0时他控式同步电动机的运行是不稳定的。若W >0,当电机负载增大,转速呈降低趋势,转子磁势平均位置更加滞于后于定子磁势即W的绝对值变小,平均电磁转矩增大,可以重新建立转矩平衡关系;反之亦然。所以W>0时他控式同步电动机的运行是稳定的。另一方面,如果不考虑铁心饱和影响,则当W=0时可认为定子磁势在宏观上对转子不表现去磁或增磁作用。但是当W≠0时,定子磁势在宏观上具有去磁或增磁的作用,并且该作用的强弱不仅与W的绝对值有关,而且正比于定子电枢电流。所以,他控式同步电动机在运行特性上类似于一台复激式直流电动机。当W<0时类似差复激,当W> 0时类似积复激。差复激可能导致电机运行不稳定、失步;而积复激电机起动转矩大,运行稳定,性能优越[6]。通过以上分析与类比可知,要使电机不失步,必须在加速阶段保证W≥0。W受加速曲线、外施电压(如逆变器直流侧电压U d)、电机参数、负载大小(T L)以及转动惯量等诸多因素的影响,如图
2
图2 W变化规律
所示。适当降低外施电压可减小W。在小惯量及风机、泵类负载条件下,很容易通过实验方法确定加速曲线和外施电压变化规律而保证电机不失步,只是转速脉动往往比较大[5]。对于大惯量、恒转矩等负载条件,设定外施电压的某种变化规律,根据定位后的转子初始位置及额定负载条件,仿真电机在有位置传感器的假设条件下的软起动过程,如图3
的点线所示,并可获知每次改变逆变状态的时刻;把这些仿真结果作为优化的加速曲线设入信号发生器,那么即使在其他负载条件下(半载、空载等)电机都可平稳加速,如图3的实线和虚线所示。通常而言,采用优化加速曲线软起动技术,可以方便地将电机从静止加速到并保持在某足够大的转速
。
图3 优化加速曲线软起动的仿真结果
4切换方法
电机加速到足够高转速时,用业已有效的转子位置信号代替同步信号就实现电机运行状态的切换。可以想象,如果位置信号与同步信号之间存在
相位差Y ,切换过程中电机运行就不平稳,严重时将导致电机失步、停机。
图4是一台样机的仿真结果。切换前电机稳定在足够大转速,假定a 相反电势波形为梯形。假如电机有位置传感器,则由其所得逆变器a 相桥臂上管的触发信号如G 1所示;而实际上由同步信号所得的相应触发信号是G 1;G 1滞后G ′
1
的电角度就是W 。这时若外施电压较高,相电流是连续的,即逆变器某相的功率开关关断时续流二极管始终导通,则该相的电机端电压是方波形,湮没了反电势的成分。因此这时的位置信号CPA 、C PB 、CPC 并不能真实地反映转子位置。图4中最初的W 约为32°,位置信号超前同步信号的相位角为Y =30°,与位置信
号对应的触发信号G ″1超前实际的G 1信号的相位角也为Y =30°。若在此情况下直接切换,则其后第
一个逆变状态所保持的时间只有T /12(正常情况下应该是T /6,T 是逆变周期),显然电机运行不平稳。由于绕组电感的影响,电枢电流有一个过渡过程,则一方面续流电流产生负电磁转矩,另一方面,可以产生正电磁转矩的相电流又不能立刻达到足够大的数值,因此在切换后的第一个逆变状态的平均电磁转矩必然比切换之前小。假如电机负载较重(三分之一额定分载转矩以上)并且转动惯量较小,那么电机转速会急剧下降。随后进入第二个逆变状
态,定子磁势跃前60电角度;由于位置检测器含有惯性环节,第二个逆变状态的保持时间也小于T /6,且平均电磁转矩较小,故转子转过的角度可能比60电角度小得多。这样当第三个逆变状态开始时,定子磁势继续跃前60电角度,从而可能导致严重的超前换流(即W <0),平均电磁转矩继续增小,转速继续下降,由此带来两个影响:(1)端电压的频率低于位置检测器预设的工作频带,使超前换流更严重,电磁转矩更小,转速更低;(2)反电势信号减弱,直至无法检测。这样的最终结果必然是切换失败、停机。以上定性分析说明:外施电压越大、W 越大,或者绕组电感越大,或者负载转矩越大,或者转动惯量越小,则对直接切换越不利。作为一种通用而且安全的切换方法,应该是“先调节W 接近于零,
再切换。”
逐渐减小外施电压U d ,W 减小,相电流仍然是连续的,端电压中的反电势成分仍然被湮没,Y 保持为30°;继续减小U d ,W 继续减小,相电流变为断续,端电压开始体现反电势成分并体现反电势的过零点,Y 也逐渐减小;直至W 接近于零,Y 也接近于零。这时C PA 、CPB 、CPC 可以反映转子位置,并且与ST A 、SYB 、SYC 几乎同相位,就可以实现平稳切换。由于W 难以直接检测,因此,本文提出切换条件应该是“Y 接近于零”。
图4的仿真结果说明。该切换条件在理论上是可以实现的。本文用Buck 式直流电压变换器逐渐减小外施电压(电压波形存在纹波),用相位鉴别器判断Y 的大小并适时地发出切换命令,实验验证了该切换条件。图5是切换过程中线电压u ab 变化的实测波形,与仿真结果吻合
。
图4 切换前,稳速、逐渐减小外施电压时的仿真结果
5结 论
无刷直流电机的反电势法无位置传感器控制
图5 切换过程中线电压实测波形(由三幅连续照片组成)
技术在转子静止或低速时不能运用,因此通常采用三段式起动技术。在重载条件下,该起动过程
往往不能顺利实现。本文对此作了深入分析,提出了有关前提条件,并用仿真与实验手段加以验证。(1)在三段式起动的加速过程中,转子磁势平均位置滞后定子磁势(90-W )电角度。只有W ≥0时,电机才不失步。
(2)采用优化加速曲线的软起动方法可实现W ≥0的前提条件。
(3)W 受电机参数、负载条件、外施电压等因素的影响,适当降低外施电压可减小W 。
(4)W 的存在使得转子位置信号超前同步信号Y 相位角。在重载、小惯量等负载条件下,直接切换将引起严重超前换流(即W <0)并导致电机失步。
(5)通用而安全的切换方法是“先逐渐减小外施电压,调节Y 接近于零,再切换。”
参 考 文 献
1 Kenichi Iizuka.Microcomputer Control for Sensorless Brush less
M otor.IEE E Trans.Ind.Appl.,1985,21(4):595-6012 Yu kio Serizaw a.Inverter Con trolled R o tary Com pres sors.Hi-tachi Review ,1987,36(3):177-185
3 DJ Bak .Brush les s DC M otor Us es Back EM F for Com muta-tion.Desig n New s,1990,(4):78-79
4 Shen J ianxin.M icrocom puter Bas ed Position Sensorless Drive
for Brush les s DC M otor.Proc.1s t Intl.Pow er Electronics &M otion Con trol Conf .,Beijing ,China ,1994,1
:402-4075 沈建新.永磁无刷直流电动机特殊绕组结构及无位置传感器控制的研究.浙江大学博士学位论文,19976 周鹗等.电机学.北京:水利电力出版社,1988
(上接第7页
)
图6 实验所
得的起动时定子相电流波形
图7 起动时计算所得的转矩
(a )转子堵转时(稳态) (b )负载时(稳态)
(c )起动时(t =0.800ms ) (d )起动时(t = 4.609ms )
图8 计算所得的磁场分布
参 考 文 献
1 傅为农.斜槽异步电机的场路耦合时步法有限元模型及其应用.上海大学博士论文,1997
2 傅为农,江建中.异步电机高频杂耗的自适应时步法有限元计算.中国电工技术学报,1996,(6):1~6
无刷直流电机(BLDC)双闭环调速系统 在无刷直流电机双闭环调速系统中,双闭环分别是指速度闭环和电流闭环。对于PWM 的无刷直流电机控制来说,无论是转速的变化还是由于负载的弯化引起的电枢电流的变化,可控量输出最终只有一个,那就是都必须通过改变PWM的占空比才能实现,因此其速度环和电流环必然为一个串级的系统,其中将速度环做为外环,电流环做为内环。调节过程如下所述:由给定速度减去反馈速度得到一个转速误差,此转速误差经过PID调节器,输出一个值给电流环做给定电流,再由给定电流减去反馈电流得到一个电流误差,此电流误差经过PID 调节器,输出一个值就是占空比。 在速度环和电流环的调节过程中,PID的输出是可以作为任意量纲(即无量纲,用标幺值来表示;标幺值:英文为per unit,简写为pu,是各物理量及参数的相对单位值,是不带量纲的数值)来输入给下一环节或者执行器的,因此无需去管PID输出的量纲,只要是这个输出值反映了给定值和反馈值的差值变化,能够使这个差值无限趋近于零即可,相当于将输出值模糊化,不用去搞的太清楚,如果你要是一直在这里纠结输出值具体是个什么东西时,那么你就会瞎在这里出不来了。假如你要控制一个参数,并且这个参数的大小和你给定量和反馈量有着直接的关系(线性关系或者一阶导数关系或者惯性关系等),那么就可以不做量纲变换。比如速度环的PID之后的输出就可以直接定义为转矩,因为速度过慢就要提高转矩,速度过快就要减小转矩,PID输出量的意义是调整了这个输出量,就可以直接改变你要最终控制的参数,并且这个输出量你是可以直接来控制的,这种情况下PID输出的含义是你可以自己定的,比如直流电机,速度环输出你可以直接定义为转矩,也可以定义为电流,然后适当的调节PID的各个参数,最终可以落到一个你能直接控制的量上,在这里最终的控制量就是占空比的值,当占空比从0%—100%时对应要写入到寄存器里面的值为0—3750时,那么0—3750就是最终的控制量的范围。 在调速控制中,既要满足正常负载时的速度调节,还要满足过负载时进行电流调节。如果单独采用一个调节器时,其调节器的动态参数无法保证两种调节过程同时具有良好的动态品质,因此采用两个调节器,分别调节主要被调量转速和辅助被调量电流,以转速调节器的输出作为电流调节器的输入,电流环是通过电流反馈控制使电机电枢电流线性受控,可达到电机输出力矩的线性控制,并使其动态范围响应快,最后再输出去控制占空比,从而改变MOSFET的导通时间,二者之间实行串级连接,它是直流电力传动最有效的控制方案。 在双闭环调速系统中,输入参数有三个,分别为给定速度和反馈速度以及反馈电流,其中给定速度由用户指定,一般指定为旋转速度(RPM 转/分钟)或直线速度(m/s 米/秒)。而反馈速度和反馈电流则需要由传感器来获取,下面来讲一下在无刷直流电机控制系统中,反馈速度和反馈电流的获取。 反馈速度:简单点的就由电机内用来检测转子位置的三个霍尔元件来得到,高端点的就加光电编码器,分别称为霍尔元件测速和编码脉冲测速。 霍尔元件测速:在电机磁极对数为1的情况下,转子旋转一周的时间内,霍尔传感器输出3路各180度信号,其中每两个传感器之间有60度的交叠信号,只要检测其中一路霍尔传感器的信号宽度就能计算出电机的速度。用输入捕捉(CAP)端口在上升沿捕捉一个时间标签,再在下降沿捕捉一个时间标签,根据两个时间标签的差值得出周期,由于霍尔传感器是在电机内固定不变的,因此每次在霍尔传感器的信号宽度下旋转的角度是一定的(即走过的距离是固定的),最后用此固定的距离除以周期即可得到速度,即T法测速,测量两个信号
无刷直流电机驱动 James P. Johnson, Caterpiller公司 本章的题目是无刷直流电动机及其驱动。无刷直流电动机(BLDC)的运行仿效了有刷并励直流电动机或是永磁直流电动机的运行。通过将原直流电动机的定子、转子内外对调—变成采用包含电枢绕组的交流定子和产生磁场的转子使得该仿效得以可能。正如本章中要进一步讨论的,输入到BLDC定子绕组中的交流电流必须与转子位置同步更变,以便保持磁场定向,或优化定子电流与转子磁通的相互作用,类似于有刷直流电动机中换向器、电刷对绕组的作用。该原理的实际运用只能在开关电子学新发展的今天方可出现。BLDC电机控制是今天世界上发展最快的运动控制技术。可以预见,随着BLDC的优点愈益被大家所熟知且燃油成本持续增加,BLDC必然会进一步广泛运用。 2011-01-30 23.1 BLDC基本原理 在众文献中无刷直流电动机有许多定义。NEMA标准《运动/定位控制电动机和控制》中对“无刷直流电动机”的定义是:“无刷直流电动机是具有永久磁铁转子并具有转轴位置监测来实施电子换向的旋转自同步电机。不论其驱动电子装置是否与电动机集成在一起还是彼此分离,只要满足这一定义均为所指。”
图23.1 无刷直流电机构形 2011-01-31 若干类型的电机和驱动被归类于无刷直流电机,它们包括: 1 永磁同步电机(PMSMs); 2 梯形反电势(back - EMF)表面安装磁铁无刷直流电机; 3 正弦形表面安装磁铁无刷直流电机; 4 内嵌式磁铁无刷直流电机; 5 电机与驱动装置组合式无刷直流电机; 6 轴向磁通无刷直流电机。 图23.1给出了几种较常见的无刷直流电机的构形图。永磁同步电机反电势是正弦形的,其绕组如同其他交流电机一样通常不是满距,或是接近满距的集中式绕组。许多无刷直流电
一种无刷直流电动机控制系统设计
————————————————————————————————作者:————————————————————————————————日期:
一种无刷直流电动机控制系统设计 摘要:介绍了MOTORALA公司专门用于无刷直流电机控制的芯片MC33035和 MC33039的特点及其工作原理,系统设计分为控制电路与功率驱动电路两大部分,控制电路以MC33035/33039为核心,接收反馈的位置信号,与速度给定量合成,判断通电绕组并给出开关信号。在驱动电路设计中,采用三相Y联结全控电路,使用六支高速MOSFET 开关管组成。通过实验,电机运行稳定。 关键词:无刷直流电机;MC33035/33039;控制电路;驱动电路 Design of control system for Brushless DC Motors SUN GuanQun;SHI Ming;TONG LinYi;XU YiPing Abstract:It introduces the MOTORALA company used for the characteristics o f the chip MC33035 and MC33039 which control the brushless direct curren t motor exclusively and its work principle. The system design divides into tw o major parts: the control circuit and the power driver circuit, the control circ uit take MC33035/33039 as the core, receive feedback position signal, with th e speed to the quota synthesis, the judgment circular telegram winding and p roduces the switching signal. In the actuation circuit design, uses the three-p hase Y joint all to control the electric circuit, uses six high speed MOSFET swit ching valve to compose. Through the experiment, the electric motor moveme nt stable is reliable. Keywords:Brushless DC motor;MC33035/33039;control circuit;drive circuit 1.引言 永磁直流无刷电机是近年来迅速成熟起来的一种新型机电一体化电机。该电机由定子、 转子和转子位置检测元件霍尔传感器等组成,由于没有励磁装置,效率高、结构简单、工作特 性优良,而且具有体积更小、可靠性更高、控制更容易、应用范围更广泛、制造维护更方便 等优点,使无刷电机的研究具有重大意义。 本系统设计是利用调压调速,根据调整供电PWM电源的占空比进而调整电压的方式实 现。本设计采用无刷直流电机专用控制芯片MC33035,它能够对霍尔传感器检测出的位置 信号进行译码,它本身更具备过流、过热、欠压、正反转选择等辅助功能, 组成的系统所需 外围电路简单,设计者不必因为采用分立元件组成庞大的模拟电路,使得系统的设计、调试 相当复杂,而且要占用很大面积的电路板。 MC33035和MC33039这两种集成芯片也可以方便地完成无刷直流电动机的正反转、 运转起动以及动态制动、过流保护、三相驱动信号的产生、电动机转速的简易闭环控制等。
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
BLDC SERVO DRIVERS 无刷直流调速驱动器 使用手册1.3 系统上电前请仔细阅读手册 DBLS-01系列 直流无刷电机驱动说明书 一、概述 本控制驱动器为闭环速度型控制器,采用最近型IGBT和MOS功率器,利用直流无刷电机的霍尔信号进行倍频后进行闭环速度控制,控制环节设有PID速度调节器,系统控制稳定可靠,尤其是在低速下总能达到最大转矩,速度控制范围150~6000rpm。 二、特点 1、PID速度、电流双环调节器 2、高性能低价格 3、20KHZ 斩波频率 4、电气刹车功能,使电机反应迅速 5、过载倍数大于2,在低速下转矩总能达到最大 6、具有过压、欠压、过流、过温、霍尔信号非法等故障报警功能 三、电气指标 标准输入电压:24VDC\36VDC\48VDC 三种 最大输入过载保护电流:5A\15A两种 加速时间常数出厂值:0.2秒其他可定制 四、端子接口说明
1、电源输入端 引角序号引角名中文定义 1 V+ 直流+24V输入 2 GND 直流0V输入 2、电机输入端 引角序号引角名中文定义 1 MA 电机A相 2 MB 电机B相 3 MC 电机C相 4 GND 地线 5 HA 霍尔信号A相输入端 6 HB 霍尔信号B相输入端 7 HC 霍尔信号C相输入端 8 +6.25 霍尔信号的电源线 3、控制信号部分 GND:信号地 F/R:正、反转控制,接GND反转,不接正转,正反转切换时,应先关断EN EN:使能控制:EN接地,电机转(联机状态),EN不接,电机不转(脱机状态) BK:刹车控制:当不接地正常工作,当接地时,电机电气刹车,当负载惯量较大时,应采用脉宽信号方式,通过调整脉宽幅值来控制刹车效果。 SV ADJ:外部速度衰减:可以衰减从0~100%,当外部速度指令接6.25V时,通过该电位器可以调速试机 PG:电机速度脉冲输出:当极对数为P时,每转输出6P个脉冲(OC门输入) ALM:报警输出:当电路处于报警状态时,输出低电平(OC门输出) +6.25V:调速电压输出,可用电位器在SV和GND形成连续可调 拔码开关说明:四个档位为OFF时,电机不运行,SW1为ON状态时,电机转速为100%,SW2为ON状态时,电机转速为80%,SW3为ON状态时,电机转速为40%,SW4为ON状态时,电机转速为20%。 4.机械安装:
基于无刷直流电机控制系统设计与实现 发表时间:2017-10-20T11:19:09.350Z 来源:《防护工程》2017年第15期作者:樊圣至[导读] 为了摆脱此系统对进口技术的依赖性,应深入研究其控制系统,提升设计水平,从而实现煤矿开采的自动化。交通运输部东海第一救助飞行队摘要:无刷直流电机具备体积小、效率高以及控制精度高等优势,且在多个领域得到了广泛使用。但在部分控制系统中,外加干扰以及参数摄动等因素干扰了系统的动静态性,基于此,本文在分析无刷直流电机结构与运行原理的基础上,指出了其软硬件方面的优化控制措施,以期为此后无刷直流电机控制系统的设计工作提供更多的参考依据。 关键词:无刷直流电机;控制系统;设计与实现 1 无刷直流电机结构 电机本体、位置测算结构、电子换相逻辑等均属于无刷直流电机的组成结构,且其与永磁同步电机较为相似。相较直流电机,无刷直流电机旋转的转子为磁极,而直流电机为绕组。且定子主要由电枢绕组、定子铁芯以及其他固定部件组成,电枢绕组一般采用三相Y型绕法,而转子磁极则采用稀土永磁钢片组成,安装在转子表面。 2 无刷直流电机软硬件设计2.1系统硬件部分 2.1.1系统硬件结构 系统硬件主要包括整流电路、开关电源电路、控制芯片、信号隔离电路、调试电路、逆变功率电路以及电流电压检测与保护电路等,其具体结构如下图1所示。 图1 无刷直流电机控制系统硬件结构组成图其中键盘控制系统信息,比如完成启动、停机、速度给定以及系统参数的在线修改等工作。系统交流电源通过整流桥获得直流电源,并供给全桥逆变以及开关电源电路。而开关电源电路则为系统提供24V以及5V的直流电源,电压检测电路通过模数转换获得电压时值,通过母线电压的监控实行过压保护动作,而主控芯片则通过判断输入信息进行控制命令。 2.1.2电源部分分路 整个系统能量的主要来源便是电源,且其呈现出交流、直流以及交流的变化过程,整个电路被分为强电与弱电两个组成部分,且单相220伏的交流电在整合后会形成310伏的直流电,为逆变电路以及开关电路提供能量。首先是整流电路,包括单相全桥不可控整流电路以及电容充电电流限制电路两个组成部分,当电机功率为1.5kW时,控制器的输出能力设定为2.2kW,且上电瞬间直流电源对电容充电,断开继电器,且电流在经过电阻的过程中得到缓冲。其次是电源电路,主要由变压器、IC1以及MC7085等部分组成,其中IC1为电源的专门控制面板。且开关电源处于电压工作模式,IC1通过电压反馈调整PWM的输出功率,从而维持电源电压的稳定运行。最后是芯片电源电路,主要采用主控芯片为3.3伏的工作电平。 2.1.3主控芯片以及周边电路研究中采用适合电机控制领域的32位Cortex -M3核的单片机,可以达到较高的运算效率,且其时钟频率为72赫兹,具备丰富的外设资源。在设计管脚分配以及附属电路时应在参考专业手册的基础上进行,第一,对于引脚60的外接电路,芯片应处于下载设置状态,且系统完成后还应焊接0欧姆的电阻,以保持引脚的低电平状态。第二,对于晶振电路应采用8M外部晶体的振荡器,且电源与大地之间连接电容,以排除电源的耦合干扰。第三,PWM信号输出控制电路,应采用安全性较强的芯片,且在芯片输出后以及光电隔离之前设置74ACT244以有效控制信号的总输出。第四,键盘系统属于独立通信模块,设计时应按照协议要求编写通讯软件即可使用。 2.1.4功率器元件以及驱动电路GTO、MOSFET、GTR、IGBT以及IPM等均属于常用的功率开关元件,且设计期间,应根据元件管件的耐压程度、最大开关频率等因素进行选择。本次研究中,电机控制要求较高的开关频率;较小的导通阻抗以及较小的驱动功率,因此可以选择MOSFET、IPM以及IGBT。比较发现,IGBT具备大电流以及低导通阻抗的特点,可以保持开关频率;而IPM则在内部集成了过高电压、过大电流以及高温的检测系统,且可以在引脚处输出故障信号,降低了系统的损害率。但考虑到此次研究的试验性质,因此应选择IGBT的分立元件组建全桥逆变电路,并确定1200伏的耐压与25安的额定电流,上升时间为50毫秒。 2.1.5模拟量采集与故障电路
直流无刷电机的控制技术 摘要围绕直流无刷电机控制运用广泛技术——基于DSP的控制系统进行了系统研究,采取模糊控制策略,设计出上位监控系统,数字化、智能化的控制系统提出方案,实践证明了系统的平稳性和快速性满足要求。 关键词直流无刷电机;DSP控制;模糊控制 0引言 数字信号(Digital Signal Processing ,DSP)是涉及很多学科,它广泛被用于很多学科与技术领域。数字信号处理器称为DSP芯片,适用在数字信号处理运算的微处理器,能够快速的在数字信号处理算法上实现。现今,DSP芯片用于运动上的控制、数控机床的控制、航天航空的控制、电力系统上的操作、自动化仪器的控制等各个领域[1],该文主要介绍这种基于DSP芯片控制直流无刷电机智能化控制系统的设计。 1 系统结构设计 系统组成由“PC 上位机、电源单元、TMS320LF2407 DSP芯片、无刷直流电机、检测单元、功率驱动模块、通讯接口”等。(见图1) 1.1 DSP芯片的选择 DSP芯片的选择是很重要的,选对了DSP芯片才能设计出其外围电路和其他电路。DSP芯片的选择要根据实际的应用系统进行确定。DSP芯片由于场合不同选择的也就不同,我们要考虑DSP芯片的运算速度、价格、运算精度、功耗、硬件的资源等。我们根据系统要求,选择TI公司TMS320LF2407芯片。 1.2无刷直流电机 该电机采取1500转/分, 无刷直流电机采用1.78A、27V电压进行供电,电机换向电路主要是由控制和驱动组成,直流无刷电机自身属于机电能量转换部分,该部分由电机电枢、永磁、传感器组成。我们把电机的电轴绕组在定子上、把永磁放在转子上,其目的是为了实现换向。无刷直流电机的工作方式是两相导通的星型3相6状态,这样操作方式是因为转子在旋转定子电流中进行不断换相来保证两个磁场电流方向不发生改变,控制3相定子电流通电顺序与大小控制电机旋转的速度。 1.3功率的驱动模块 TOSHIBA公司采用IPM系列智能型模块,IPM主要集成了检测、控制、逻辑、保护电路这样有效提高了稳定性与可靠性。东芝的高速光耦TLP550(F)是
直流无刷电机的控制系统设计方案1 引言 1.1 题目综述 直流无刷电机是在有刷直流电机的基础上发展起来的,它不仅保留了有刷直流电机良好的调试性能,而且还克服了有刷直流电机机械换相带来的火花、噪声、无线电干扰、寿命短及制造成本高和维修困难等等的缺点。与其它种类的电机相比它具有鲜明的特征:低噪声、体积小、散热性能好、调试性能好、控制灵活、高效率、长寿命等一系列优点。基于这么多的优点无刷直流电机有了广泛的应用。比如电动汽车的核心驱动部件、电动车门、汽车空调、雨刮刷、安全气囊;家用电器中的DVD、VCD、空调和冰箱的压缩机、洗衣机;办公领域的传真机、复印机、碎纸机等;工业领域的纺织机械、医疗、印刷机和数控机床等行业;水下机器人等等诸多应用[1]。 1.2 国内外研究状况 目前,国内无刷直流电机的控制技术已经比较成熟,我国已经制定了GJB1863无刷直流电机通用规范。外国的一些技术和中国的一些技术大体相当,美国和日本的相对比较先进。当新型功率半导体器件:GTR、MOSFET、IGBT等的出现,以及钕铁硼、钐鈷等高性能永磁材料的出现,都为直流电机的应用奠定了坚实的基础。近些年来,计算机和控制技术快速发展。单片机、DSP、FPGA、CPLD等控制器被应用到了直流电机控制系统中,一些先进控制技术也同时被应用了到无刷直流电机控制系统中,这些发展都为直流电机的发展奠定了坚实的基础。 经过这么多年的发展,我国对无刷电机的控制已经有了很大的提高,但是与国外的技术相比还是相差很远,需要继续努力。所以对无刷直流电机控制系统的研究学习仍是国内的重要研究内容[2]。 1.3 课题设计的主要内容 本文以永磁方波无刷直流电机为控制对象,主要学习了电机的位置检测技术、电机的启动方法、调速控制策略等。选定合适的方案,设计硬件电路并编写程序调试,最终设计了一套无位置传感器的无刷直流电机调速系统。本课题涉及的技术概括如下:
无刷直流电机的工作原理
无刷直流电机原理 无刷直流电动机的工作原理 普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。 无刷直流电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。● 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。无刷直流电动机的原理简图如图一所示:
主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ 调制波的对称交变矩形波。永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组建处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电度角,转子跟随定子磁场转动相当于60°电度角空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电度角,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 ● 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。电动机的转矩正比于绕组平均电流;TM=Ktlav(N?M)电动机两相组反电势的差比于电动机的角速度;ELL=Keω(V)所以电动机绕组中的平均电流为:Iav=(Vm-ELL)/2Ra(A)其中,Vm=δ?VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩:Tm=δ?(VDC?Kt/2Ra)-Kt?(Keω/2Ra)Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励支流电动机电枢电压控制相同的控制特性和机械特性。无刷直流电动机的转速设定,取决于速度指令Vc的高低,如果速度指令最大值为+5V对应的最高转速:Vc(max)ón max,那么,+5V以下任何电平即对应相当的转速n,这就实现了变速设定。当Vc设定以后,无论是负载变化、
无刷直流电机控制系统的Proteus仿真-机械制造论文 无刷直流电机控制系统的Proteus仿真 王家豪潘玉民 (华北科技学院电子信息工程学院,河北三河101601) 【摘要】基于Proteus软件仿真平台,提出了一种对无刷直流电机(BLDCM)控制系统实现了转速闭环控制的方案。该系统以AT89S52单片机为核心,采用IR2101芯片驱动及AD1674实现速度,并利用数码动态显示转速,通过增量式PID调节对无刷直流电机实现转速闭环稳定控制。仿真结果表明该系统具有可控调速、显示直观等特点。 关键词无刷直流电机(BLDCM);Proteus;增量式PID;闭环控制 0引言 无刷直流电机(BLDCM)既有直流有刷电机的特性,又有交流电机无刷的优点,在快速性、可控性、可靠性、输出转矩、结构、耐受环境和经济性等方面具有明显的优势,近年来得到迅速推广[1]。BLDCM是一种用电子换向取代机械换向的新一代电动机,与传统的直流电动机相比,它具有过载能力强,低电压特性好,启动电流小等优点。近年来在工业运用方面大有取代传统直流电动机的趋势,所以研究无刷直流电机的驱动控制技术具有重要的实际应用价值。 本设计采用增量式PID控制策略控制无刷电动机,并在Proteus平台上进行转速闭环系统仿真。搭建了无刷直流电动机转速控制系统的仿真模型,基于80C51控制核心,采用keil C51软件编写C程序。 1系统硬件组成 控制系统的硬件组成如图1所示。采用Atmel公司的AT89S52单片机为系统
控制核心、IR2101驱动的MOSFET三相桥式逆变器、无刷直流电机、A/D转换转速检测、闭环PID控制、按键检测、档位和转速显示等部分组成。 2控制系统核心及外围电路 系统核心AT89S52单片机最小系统及按键电路如图2所示。 AT89S52芯片是8位单片机,具有廉价、实用及运算快等优点,它有两个定时器,两个外部中断接口,24个I/O口,一个串行口。 单片机首先进行初始化,将显示部分(转速显示、档位显示)送显“0”然后通过中断对按键进行检测当检测到启动键按下时,系统启动,控制核心输出初始控制码,与此同时通过AD转换器读取当前的实时转速,一方面用于显示,另一方面将当前转速与设定转速送入PID控制环节然后输出下一时刻的控制码。 在本次设计中使用80C51的外部中断接口0(INT0)作按键检测(见图3),通过四个与门,当有任何一个按键按下去时tap端都会出现低电平引发中断。
1引言无刷直流电机最本质的特征是没有机械换向器和电刷所构成的机械接触式换向机构。现在,无刷直流电机定义有俩种:一种是方波/梯形波直流电机才可以被称为无刷直流电机,而正弦波直流电机则被认为是永磁同步电机。另一种是方波/梯形波直流电机和正弦波直流电机都是无刷直流电机。国际电器制造业协会在1987年将无刷直流电机定义为“一种转子为永磁体,带转子位置信号,通过电子换相控制的自同步旋转电机”,其换相电路可以是独立的或集成于电机本体上的。本次设计采用第一种定义,把具有方波/梯形波无刷直流电机称为无刷直流电机。从20世纪90年代开始,由于人们生活水平的不断提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都向着高效率化、小型化及高智能化发展,电机作为设备的重要组成部分,必须具有精度高、速度快、效率高等优点,因此无刷直流电机的应用也发展迅速[1]。 1.1 无刷直流电机的发展概况 无刷直流电动机是由有刷直流电动机的基础上发展过来的。 19世纪40年代,第一台直流电动机研制成功,经过70多年不断的发展,直流电机进入成熟阶段,并且运用广泛。 1955年,美国的D.Harrison申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,形成了现代无刷直流电动机的雏形。 在20世纪60年代初,霍尔元件等位置传感器和电子换向线路的发现,标志着真正的无刷直流电机的出现。 20世纪70年代初,德国人Blaschke提出矢量控制理论,无刷直流电机的性能控制水平得到进一步的提高,极大地推动了电机在高性能领域的应用。 1987年,在北京举办的德国金属加工设备展览会上,西门子和博世两公司展出了永磁自同步伺服系统和驱动器,引起了我国有关学者的注意,自此我国开始了研制和开发电机控制系统和驱动的热潮。目前,我国无刷直流电机的系列产品越来越多,形成了生产规模。 无刷直流电动机的发展主要取决于电子电力技术的发展,无刷直流电机发展的初期,由于大功率开关器件的发展处于初级阶段,性能差,价格贵,而且受永磁材料和驱动控制技术的约束,这让无刷直流电动机问世以后的很长一段时间内,都停
1.2 无刷直流电机的工作原理 1.2.1 无刷直流电机的特点 直流电机主要有直流有刷电机和无刷直流电机两种。 1.有刷直流电机 直流电机以良好的启动性能、调速性能等优点著称,其中属于直流电机一类的有刷直流电机采用机械换向器,使得驱动方法简单,其模型示意图如图 1.2 所示。 电机主要由永磁材料制造的定子、绕有线圈绕组的转子(电枢)、换向器和电刷等构成。只要在电刷的A和B两端通入一定的直流电流,电机的换向器就会自动改变电机转子的磁场方向,这样,直流电机的转子就会持续运转下去。 由些可见,换向器和电刷在直流电机中扮演着重要的角色,虽然它可以简化电机控制器的结构,但是,它自身却存在一定的缺点: z 结构相对复杂,增加了制造成本; z 容易被环境(如灰尘等)影响,降低了工作的可靠性; z 换向时会产生火花,限制了使用范围; z 容易损坏,增加了维护成本等。 2.无刷直流电机 无刷直流电机(Brushless Direct Current Motor, BLDCM)的诞生,克服了有刷直流电机的先天性缺陷,以电子换向器取代了机械换向器,所以无刷直流电机既具有直流电
机良好的调速性能等特点,又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。 图 1.3 所示无刷直流电机模型,它是从图 1.2转化过来的模型。它主要由用永磁材料制造的转子、带有线圈绕组的定子和位置传感器(可有可无)组成。可见,它和直流电机有着很多共同点,定子和转子的结构差不多(原来的定子变为转子,转子变为定子),绕组的连线也基本相同。但是,结构上它们有一个明显的区别:无刷直流电机没有直流电机中的换向器和电刷,取而代之的是位置传感器。这样,电机结构就相对简单,降低了电机的制造和维护成本,但无刷直流电机不能自动换向(相),牺牲的代价是电机控制器成本的提高(如同样是三相直流电机,有刷直流电机的驱动桥需要 4 只功率管,而无刷直流电机的驱动桥则需要 6 只功率管)。 图 1.3 所示为其中一种小功率三相、星形连接、单副磁对极的无刷直流电机,它的定子在内,转子在外,结构和图 1.2 所示的直流电机很相似。另一种无刷直流电机的结构和这种刚刚相反,它的定子在外,转子在内,即定子是线圈绕组组成的机座,而转子用永磁材料制造。 无刷直流电机有以下的特点: z 无刷直流电机的外特性好,能够在低速下输出大转矩,使得它可以提供大的起动转矩; z 无刷直流电机的速度范围宽,任何速度下都可以全功率运行; z 无刷直流电机的效率高、过载能力强,使得它在拖动系统中有出色的表现; z 无刷直流电机的再生制动效果好,由于它的转子是永磁材料,制动时电机可以进入发
1.检测霍尔传感器的值可以判断出转子的位置,再使能相应的上下桥臂,则能驱动电机运动;若要让电机持续转动,则必须再次检测传感器值及使能相应的上下桥臂。这里采用的是将霍尔传感器输出的三根线相边的IO口配置成外部中断,并且为边沿触发,在中断函数中加入传感器检测与上下桥臂切换程序,如此电机就能持续运转了。 2.上桥臂的控制采用IO口置高低电平来控制上桥臂的通断,下桥臂则使用单片机内部集成的三路PWM波来控制,通过控制PWM波的占空比,可以实现对电机的调速了。实际测得,占空比与电机的速度成正比例关系,在PWM波频率为20KHz时,占空比增加1%,速度增加60rpm,并在占空比为53%时达到额定转速3000rpm(空载)。 3.速度测量则采用如下公式: 电机每转一圈,霍尔值改变6次x5个周期=30次,记录边沿触发的中断次数N/30=电机转过的圈数,设运转时间为t(s)则电机转速v=N/30/t*60 rpm。即动转时间为2s时,霍尔值改变次数即为速度值,单位rpm。 4.调速:给定速度,由电机驱动板自动由当前速度平滑过渡到给定速度。实际测试发现,速度变化量很大时,电机会有突然加速或减速时的冲击;因此,调速应有一个缓冲的过程。即加速或减速应以小步进缓慢增加或减少占空比来让速度渐渐达到最终值。 #include "stm32f10x.h" #include "driver_motor.h" #define PWM_PERIOD_T 400 #define U_Up_On GPIOB->BSRR = GPIO_Pin_13 #define U_Up_Off GPIOB->BRR = GPIO_Pin_13 #define U_Dn_On GPIOA->BSRR = GPIO_Pin_8 #define U_Dn_Off GPIOA->BRR = GPIO_Pin_8 #define V_Up_On GPIOB->BSRR = GPIO_Pin_14 #define V_Up_Off GPIOB->BRR = GPIO_Pin_14 #define V_Dn_On GPIOA->BSRR = GPIO_Pin_9 #define V_Dn_Off GPIOA->BRR = GPIO_Pin_9 #define W_Up_On GPIOB->BSRR = GPIO_Pin_15 #define W_Up_Off GPIOB->BRR = GPIO_Pin_15 #define W_Dn_On GPIOA->BSRR = GPIO_Pin_10 #define W_Dn_Off GPIOA->BRR = GPIO_Pin_10 #define SU_HOR GPIOA->IDR & GPIO_Pin_15 #define SV_HOR GPIOA->IDR & GPIO_Pin_12 #define SW_HOR GPIOA->IDR & GPIO_Pin_11 //u8 Motor_Dir=0; //u8 Motor_EN=0;
合肥师范学院本科生毕业论文(设计)开题报告 (学生用表) 装 订 线
第l章主要叙述了无刷直流电机的发展趋势、无刷直流电机的控制技术、研究背景及意义。 第2章首先介绍了无刷直流电机的基本结构和工作原理,然后给出了常见的无刷直流电机的数学模型及其推导过程,在此基础上对无刷直流电机的稳态特性进行了详细分析。 第3章对本控制系统的总体结构和设计进行介绍。主要包括控制系统的整体方案,控制芯片,控制技术以及控制策略的选择。 第4章对控制系统的硬件电路进行设计,包括DSP最小系统、功率驱动电路、采样检测电路、保护电路等的设计,并对各个部分进行了详细的分析。 第5章以TI公司的CCS开发环境为开发工具,对整个控制系统的软件部分进行了设计。 第6章总结与展望,总结了本文的主要工作,展望了以后工作的研究方向。 五、可行性分析 此次研究是在指导老师的指导下搜集,查阅相关资料,确定能够通过应用DSP 芯片进行控制是最优方案,采用TI公司的TMS320F2812作为控制器。根据现在无刷直流电机的控制技术的发展水平和未来的发展趋势及可操作性进行分析,该课题能够顺利进行。 六、设计方案 6.1无刷直流电机的基本结构 无刷直流电机的设计思想来源于利用电子开关电路代替有刷直流电机的机械换向器。普通有刷直流电机由于电刷的换向作用,使得电枢磁场和主磁场的方向在电机运行的过程中始终保持相互垂直,这样能够产生最大的转矩,从而驱动电机不停地运转下去。无刷直流电机取消电刷实现了无机械接触换相,做成“倒装式直流电机"的结构,将电枢绕组和永磁磁钢分别放在定子和转子侧。无刷直流电机必须具有由控制电路、功率逆变桥和转子位置传感器共同组成的换相装置以实现电机速度和方向的控制[5]。因此,可以认为无刷直流电机是典型的机电一体化器件,其基本结构由电动机本体、驱动控制电路及转子位置传感器三部分组成,如图所示。 无刷直流电机的构成 6.2无刷直流电机的工作原理 普通直流电机的电枢在转子上,而定子产生固定不变的磁场。为了使直流电机旋转,需要通过换相器和电刷不断地改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转[6]。 无刷直流电动机为了去掉电刷,将电枢放到定子上,而转子做成永磁体,这样的结构正好与普通直流电动机相反。然而即便是这样的改变仍然不够,因为直流电通入定子上的电枢以后,产生的不变磁场还是不能使电动机转动起来。为了达到使电动机
本文1998年2月25日收到 设计分析 无传感器无刷直流电机三段式起动技术的深入分析 沈建新 吕晓春 杜军红 陈永校 (南洋理工大学 新加坡) (浙江大学 杭州310027) Detail Analyses of 3-step Start for SLBLDC Motor Shen J ianxin Lu ·· X iaoc hun Du Junhong Chen Yongx iao (Nanyang Technological Univ ersity ,Singa po re) (Zhejiang Univ ersity,H a ng zho u 310027) 【摘 要】 反电势法无位置传感器无刷直流电机常常采用三段式起动技术。本文分析其加速和切换过程中确保电机不失步的各自条件,并用仿真与实验手段加以验证。 【关键词】 无刷直流电机 反电势 起动 【Abstract 】 A 3-step sta rt technique is usually ap-plied to a po sition -senso rless br ushless D C (SLBL DC)mo tor w ith back EM F me tho d.T his paper analy zes the conditio ns to prev ent the mo to r fr om lo sing -step during the accele rating step a nd th e sta te-changing step.Simula-tio n and ex perimenta l r esults a re also presented to v erify the analyses. 【Keywords 】 br ushless D C mo to r back EM F sta rt 1引 言 传统永磁无刷直流电机的位置传感器带来诸多不利影响 [1~3] ,因此,长期以来国内外研究开发 了无刷直流电机的多种无传感器控制技术,其中最简单而实用的方法是基于反电势检测。由于无刷直流电机只需要转子的若干个关键位置信号,而某相绕组的反电势(即旋转电势、发电机电势)由正变负或由负变正而过零时,转子的直轴必与该相绕组的轴线重合。所以,只要测出各相反电势的过零点就可获得三相电机所需的转子六个关键位置信号。这类方法统称为反电势法。据此原理,利用无源滤波器、比较器等硬件电路(按惯例称作转子位置检测器)可间接地从电机的端电压波形检测反电势的过零点[2,4] ,其输出的三路数字信号就是在相位上互差120°的转子位置信号,分别用CPA 、CPB 、CPC 表示,用以编码产生逆变器触发信号。正常情况下,三路转子位置信号只有六种组合状态,并对应六种 逆变状态。逆变状态每发生变化的时刻,也是转子处于某个关键位置的时刻。 目前反电势法还存在不少问题。然而,正是因为反电势法的简单、容易实现,国内外文献并未对存在的问题作深入的研究。同样的原因,现存问题的解决将有利于反电势法的进一步推广实用。本文将着重分析反电势法无传感器无刷直流电机的三段式起动技术,通过仿真、实验等手段解决在重载条件下常常不能顺利起动的问题。 2三段式起动技术 由于无刷直流电机在静止或低速时反电势为零或很小,无法用来判断转子位置,因此反电势法需要采用特殊的起动技术。通常是按他控式同步电动机的运行状态从静止开始加速,直至转速足够大,再切换至无刷直流电机运行状态。这个过程称为三段式起动技术,包括转子定位、加速和运行状态切换三个阶段。其电路框图如图1所示 。 图1 三段式起动技术之电路框图 (1)在起动过程中,反电势法的转子位置信号CPA 、CPB 、CPC 无效,所以图1的信号选择电路将它们屏蔽掉,而选通了由信号发生器产生的一系列同步信号SYA 、SYB 、SYC 。这三路同步信号与