任务三 Autochif-4主机遥控工作过程
一、学习目标(learning target)
1、了解AC-4主机遥控系统工作过程
2、重点掌握AC-4主机遥控系统参数显示和设置
3、 AC-4主机遥控系统的功能试验 二、学习任务(learning assignment )
本项目的主要任务是掌握AC-4主机遥控系统的主机遥控工作过程及参数修改。掌握AC-4主机遥控系统的功能试验。 【背景知识】(background knowledge ) 一、AC-4主机遥控系统工作过程:
1.主机正车起动过程的状态指示
控制部位选择在驾驶台,BRIDGE 灯亮;驾驶台车钟手柄在停车位置时,STOP 灯亮;如果起动阻塞灯亮,说明有起动故障存在,具体是什么故障,在“START FAIUBLOCK ”区域的指示灯17到24予以指示。例如:“START FAIUBLOCK ”区域中的20号灯亮,则说明起动空气压力低,应检查空气瓶压力和主起动阀的位置。当起动空气压力恢复正常,按动复位按钮,或将车钟手柄扳向停车位置。复位后,将车钟手柄扳向正车任何位置,正车车令、起动设定、正车电磁阀、起动电磁阀指示灯亮。主机起动后,正车转向指示灯亮。如果设定值限制器指示灯亮,则在设定值限制器区域中的相关指示灯亮。例如设定值限制器区域中临界转速指示灯亮,表明车令设定转速在临界转速区内,同时,驾驶台上的临界转速限制指示灯亮,当车钟手柄越过临界转速区后,指示灯熄灭。
2.主机停车过程的状态指示
驾驶台车钟手柄放在停车位置,停车指示灯亮;调速器停止工作、停车电磁阀和正车转向指示灯亮。在主机停车过程中,主机状态区域中的正在停机指示灯亮。在主机停车完成后,主机状态区域中的02号备车完毕指示灯亮。
3.主机倒车起动过程的状态指示
驾驶台车钟手柄放在倒车位置,倒车车令指示灯亮。起动设定、倒车电磁阀、起动电磁阀指示灯亮。主机起动后,倒车转向指示灯亮。在主机倒车起动完成后,主机状态区域中的05号运行指示灯亮。
为了便于在日常使用、管理维护、故障诊断和系统调试
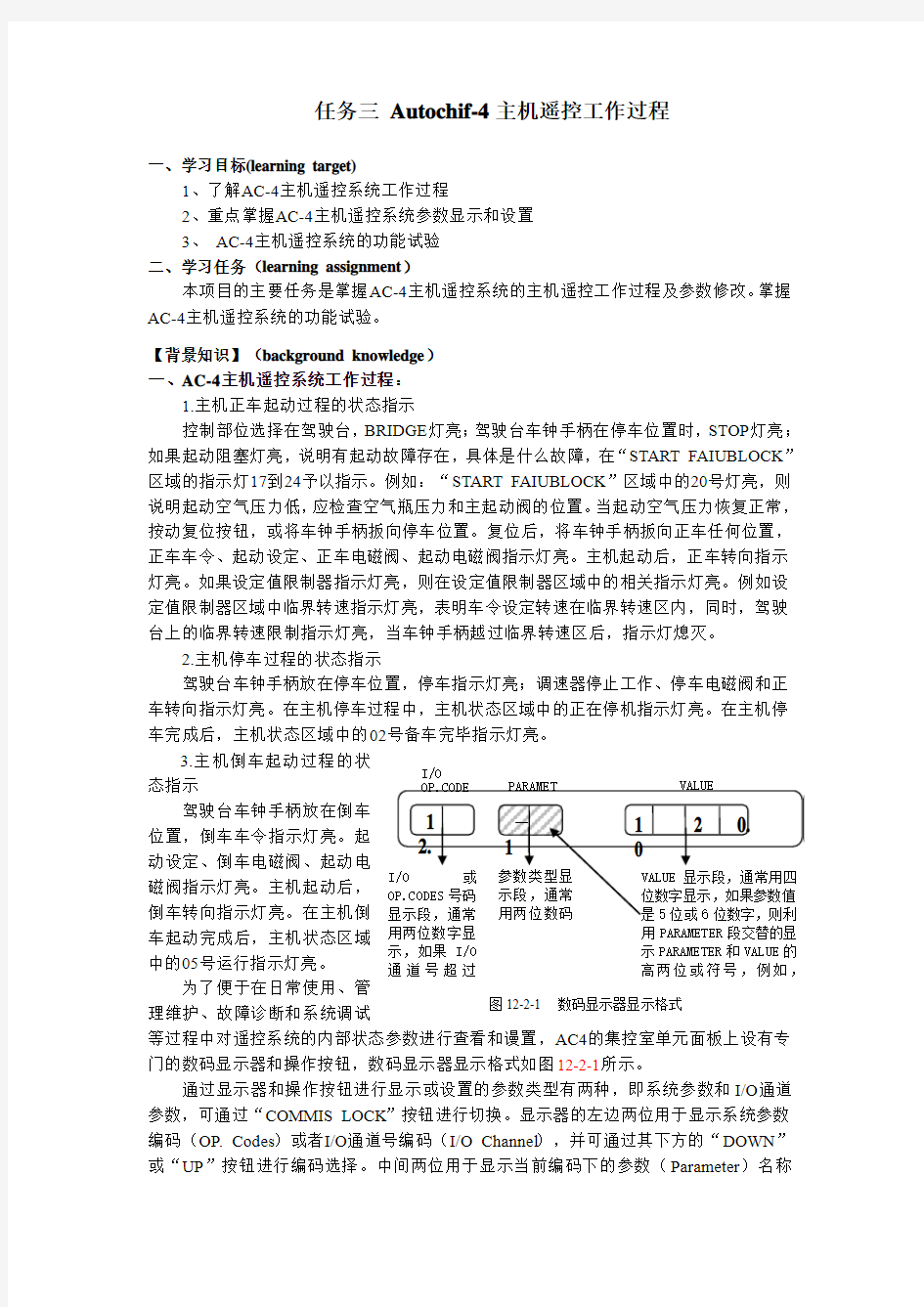
等过程中对遥控系统的内部状态参数进行查看和谩置,AC4的集控室单元面板上设有专门的数码显示器和操作按钮,数码显示器显示格式如图12-2-1所示。
通过显示器和操作按钮进行显示或设置的参数类型有两种,即系统参数和I/O 通道参数,可通过“COMMIS LOCK ”按钮进行切换。显示器的左边两位用于显示系统参数编码(OP. Codes )或者I/O 通道号编码(I/O Channel ),并可通过其下方的“DOWN ”或“UP ”按钮进行编码选择。中间两位用于显示当前编码下的参数(Parameter )名称
I/O
用两位数字显示,如果I/O 通道号超过
用PARAMETER 段交替的显示PARAMETER 和VALUE 的高两位或符号,例如,
图12-2-1 数码显示器显示格式
或参数性质,同样可以通过其下方的“DOWN”或“UP”按钮进行选择。右边的四位用于显示具体的参数值(VALUE),必要的情况下可通过“LOWER”和“-RAISE”按钮进行修改,修改完毕按ENTER键输入。平时,集控单元面板上的“CHANGE LOCK”修改锁一般置于“LOCK”位置,通过编码显示框下面的“DOWN”或“UP”按钮操作只能读出编码55至58的参数显示值。只有用钥匙将“CHANGE LOCK”修改锁置于“OPEN'T位置时,才能将编码1至59的参数全部读出。
爬壁遥控车说明书 篇一:爬壁小车简介 爬壁小车简介 背景及目的:现在工程中需要在高空完成一些作业(如建筑业,核工业,造船业),这些作业让人去完成很难,也很危险。本组机器人为一辆爬壁小车,可以替人去完成这些高难度,高危险的高空作业。依托它的高空滞留能力,我们还可以进一步开发,完成从高空对地面的监测,通过红外遥感控制也可以完成某些侦查任务,达到军民两用的效果,具有极大的现实意义。 机器人描述: 本项目主要依据真空吸附原理,通过msp430单片机对电机的可编控性和红外遥感的控制原理。 本作品由履带传动,通过履带上的电磁铁间接控制吸盘,从而提供稳定的吸附力吸附在墙壁上。在小车上有一个可以180度在竖直与履带平行的面内转动的杆1,杆1的一端带有摄像头,在小车的前部有一个固定杆2,杆2的长度和杆1相同。在杆2上装有一个红外对管,红外对管竖直向下发射红外线。当小车在墙上爬行的时候杆1在后面,如果红外对管发现缝隙后小车停止,同时杆2转动180度向前和杆1并排,并开始摄像。
具体内容: 1)机器人结构的设计。 2)可以使杆1完成180度的转向。 3)通过履带吸盘的吸附及移动使小车在竖直墙壁上自由移动。 4)寻找有机玻璃及高分子材料制作车身,减轻小车的重量。 5) 摄像头拍摄的启动与终止。 6)使用msp430单片机编程完成以上动作。 技术难关: 1、车体材料的选择。所选的材料必须足够轻,减轻车子的载荷。 2、履带轮的吸附。必须找到或者制作可以通过磁铁控制吸盘的履带轮。 3、两根杆的相对位置以及根据这个相对位置需要小车在检测到缝隙后需要做的移动。 4、摄像头的启动和终止。 意义: 1)本组做的高空作业机器人可以沿着墙面竖直爬行,通过携带探测设备对要研究高空中的目标进行测试,弥补了现有设备通过人去完成的缺陷。 2)可应用于高空建筑物的清洗和粉刷,高空物品的传递,
智能汽车充电桩系统 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】
智能汽车充电桩系统 概述 发展电动汽车是国家新能源战略的重要方向,电动汽车充电站的技术发展、布局、建设又是发展电动汽车必不可少的重要环节。才茂凭借多年来对电力系统、电力电子技术、电池储能技术的理解和积累推出基于V2G技术和储能技术的电动汽车充电站电气系统解决方案。该方案不但能提供电动汽车电池充电、换电,还能扩展为分布式储能电站,开放、互动、智能的充放电管理,将使具有储能电站功能的充电站成为智能电网的重要组成能部分。 组成部分 充电站电气系统包括供电系统、充电设备、监控系统三大部分。 供电系统主要为充电设备提供电源,主要由一次设备(包括开关、变压器及线路等)和二次设备(包括检测、保护、控制装置等)组成,专门配备有源滤波装置消除谐波,稳定电网。 充电设备是整个充电站电气系统的核心部分,一般分直流充电装置和交流充电装置(桩),直流充电装置,即非车载充电机,实现电池快充功能,可按功率输出分成大型、中型、小型,公司产品型号为。 交流充电装置(桩)提供电池慢充功能,公司产品型号X-AR。 非车载充电机采用V2G技术,通过进口高频IGBT整流逆变模块,不仅能对动力电池进行安全、快速地充电,而且依靠控制器与后台系统的通讯,能将动力电池的能量回馈到电网,完成电网与电池之间的双向能量交换。X-DR型非车载充电机采用高速CAN总线,保证通讯连接的快速、可靠。具体原理图、实物图如下: 交流充电桩主要提供车辆慢充的功能,输出为交流电,连接车载充电器。具体原理图、实物图如下: 充电监控系统由一台或多台工作站或服务器组成,可以包括监控工作站、数据服务器等,这些计算机通过网络联结。监控工作站提供充电监控人机交互界面,实现充电机的监控和数据收集、查询等工作;数据服务器存储整个充电系统的原始数据和统计分析数据等,提供数据服务及其他应用服务。 技术优势 充电站电气建设方案的主要技术优势:1.安全、高效、智能、互动的充放电管理系统,将使充电站真正成为坚强智能电网的重要组成部分,2.成熟的输配电技术和优化的电能质量控制技术保证充电站安全、可靠的并网运行。3.先进V2G技术、电力电子技术和对动力电池的长期研究既保证动力电池高效的充电效率,也充分考虑电网的高效稳定运行。
2010全国电子专业人才设计与技能大赛“电子组装与调试”预赛 “汽车防盗控制器”电路功能简介 一、功能说明 汽车防盗控制器主要由无线编码发射电路(无线发射板)和无线(解码)接收电路、控制部分及各单元电路组成。编码和解码芯片分别采用PT2262和PT2272-M4,发射和接收地址编码设置必须完全一致才能配对使用。 无线发射电路将编码后的地址码、数据码、同步码随同315MHz无线载波一起发射出去;接收电路接收到有效信号,经过解码、处理后变成所需的电信号(当接收到发送过来的信号时,解码芯片PT2272的VT脚输出一个正脉冲,与此同时,相应的数据管脚输出高电平),通过单片机控制各单元电路的工作状态。 二、电路功能简介 用发射板发射无线电信号,按下发射板中的不同的按键(K1、K2、K3、K4)主板接收到相应信号后,实现相应功能: 按下K1键:语音内容为“进入防盗”“振动报警”“车门打开报警”,系统进入防盗检测中,数码管显示“AAAA”。当检测到振动时,数码管显示“1111”,语音报读“振动报警”,并发出警报(大约3.5s);当检测到微波时,数码管显示“2222”,语音内容为“请勿动车”,并发出警报(大约2.5s)。 按下K2键:语音内容为“取消防盗”,系统进入不防盗状态,微波检测和振动检测无效。 按下K3键:表示车门打开,数码管显示“CCCC”,语音内容为“请关好门”,继电器吸合,一小段时间继电器关闭,数码管显示“OOOO”,表示车门已关好。 按下K4键:数码管显示“————”,语音警报响一声(表示车主寻车)。 此外,通过按下主板电路中的K1、K2、K3、K4,也可以同样实现上述对应功能。 三、元器件介绍 1.集成电路PT2262/2272-M4 PT2262和PT 2272是通用配对编、解码芯片,PT2262/2272最多可有12位(A0-A11)三态地址端管脚(悬空、接高电平、接低电平),任意组合可提供531441种地址码。 编码芯片PT2262发出的编码信号由地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272接收到信号后,其地址码经过两次比较核对后,VT脚才输出高电平。PT2262的管脚图如图1所示,管脚说明如表1所示;PT2272的管脚图如图2所示,管脚说明如表2所示。 图1 PT2262管脚图图2 PT2272管脚图 表1 PT2262管脚说明 名称管脚说明 A0-A11 1~8、10~13 地址管脚,用于进行地址编码,可置为“0”、“1”、“f”(悬空)。 D0-D5 7~8、10~13 数据输入端,有一个为“1”即有编码发出,内部下拉。 Vcc 18 电源正端(+)。 Vss 9 电源负端(-)。 TE 14 编码启动端,用于多数据的编码发射,低电平有效。 OSC1 16 振荡电阻输入端,与OSC2所接电阻决定振荡频率。
题目: 无线遥控车小组成员: 指导教师:
摘要 随着电子技术的飞速发展,新型大规模遥控集成电路的不断出现,使得遥控技术有了日新月异的发展。遥控装置的中心控制部件已从早期的分立元件、集成电路逐步发展到现在的单片微型计算机,智能化程度大大提高。近年来,遥控技术在工业生产、家用电器、安全保卫以及人们的日常生活中使用越来越广泛。无线电遥控技术的诞生,起源于无线电通信技术,最初的构想是无线电电报技术的建立,真空电子管的发明使得无线电技术的应用和普及很快应用在民用和军用等各个领域。自从爱迪生发明电灯以来,人类对照明电器的开启和关断控制主要使用手动机械开关。随着无线电的发展,从上个世纪60年代开始,相继出现了无线电遥控的小车。 无线通信是利用电磁波在自由空间中传播的一种通信方式。近些年在通信领域中发展最快、应用最广的的就是无线通信技术。本次课题主要采用专用芯片SCTX2B/SM6135组成一对CMOS集成芯片,由发射和接收两部分组成。采用部分外围元器件,就可以实现发射和接收、编码与解码功能,具有抗干扰能力强,元器件数量少,可靠性高等优点。有4个控制键用于控制遥控车的动作,包括前进,后退,左转,右转功能。通过设计培养学生综合运用所学知识,结合实际独立完成课题的工作能力,了解5功能集成芯片SCTX2B/SM6135的引脚功能和应用电路、提高画图能力,熟练protel99 软件的使用,掌握PCB制版的流程,熟练掌握焊接技术,以及各种元器件的测试与使用。
引言 第一章无线遥控技术的概述 1.1 开发背景 1.2 无线遥控技术介绍及其运用 第二章无线遥控车的基本原理 2.1 发射电路基本原理 2.2 接收电路基本原理 2.3 无线遥控车的工作原理 2.3.1 主要元器件简介 2.3.1.1 SCTX2B的主要性能结构 2.3.1.2 解码电路SM6135W的功能结构 2.3.2 无线遥控车的基本原理 第三章印刷电路板介绍 3.1 PCB设计流程 3.1.1印制电路板的设计的一般步骤 3.1.2印刷板制作工艺流程 第四章机械构建及其原理 4.1 底盘结构 4.2 前轮转向系统 4.3 后轮驱动系统 4.4 电机选择 4.5 电池选择 总结及致谢
主机遥控系统 (一) 单项选择题 1. 在主机遥控系统中,其控制空气气源的压力一般为 A.0.14 MPa B.0.45 MPa C.0.7 MPa D.1.0 MPa 2. 在主机遥控系统中把操车手柄从正车全速立即扳到倒车某速度挡,其停油时刻发生在 A.动车钟手柄的瞬间 B.车钟手柄过停车位置时 C.车钟手柄扳到位时 D.在换向过程中 3. 在主机遥控系统中把车钟手柄从全速正车扳到倒车某速度挡,制动开始时刻为 A.动车钟手柄瞬间 B.车钟手柄过停车位置时 C.车钟手柄扳到位时 D.换向完成时 4. 在主机遥控系统中把车钟手柄从全速正车扳到倒车某速度挡,主起动阀打开时刻为 A.车钟手柄过停车位置时 B.主机转速下降到换向转速时 C.换向完成时 D.换向完成且低于发火转速时 5. 在主机遥控系统中,上次停车凸轮轴在倒车位置,现把车钟手柄从停车位扳到正车全速挡,其主起动间打开和 关闭时刻分别为* A.换向完成,高于发火转速 B.动车钟手柄时刻,换向完成 C.车钟手柄扳到位,换向完成 D.换向完成,低于发火转速 6. 在主机遥控系统中,上次停车凸轮轴在正车位置,现在车钟手柄从停车位扳到正车全速,则主起动阀打开和关 闭的时刻分别为 A.扳动车钟手柄时,高于发火转速 B.车钟手柄扳到位时,高于发火转速 C.车钟手柄扳到位时,低于发火转速 D.扳动车钟手柄时,低于发火转速 7. 在单凸轮换向的主机遥控系统中,把车钟手柄从倒车慢速扳到正车全速挡时,换向开始时刻为* A.扳动车钟手柄时刻 B.车钟手柄过了停车位置时
C.车钟手柄扳到位时 D.主机转速下降到0时 8. 在主机遥控系统中,为防止外界干扰而引起供油量的变化,常用死区控制方法,当遇到恶劣海况时,死区范围 应该是 A.最大 B.适中 C.最小 D.按工况自动调节 9. 在主机遥控系统中,若发现遥控系统失灵,你首先进行的操作是 A.关闭气源截止阀 B.拉开遥控系统电源开关 C.把机旁操纵部位转换阀扳到手控位 D.把集中控制室转换阀转至机控位 10. 在主机遥控系统中,制动过程是出现在 A.正常停车过程 B.故障停车过程 C.应急停车过程 D.运行中完成换向过程 11. 以下不属于主机遥控系统的功能是 A.人员舒适功能 B.安全保护功能 C.系统模拟功能 D.应急操纵功能 12. 全气动主机遥控系统的主要缺点是 A.管理复杂 B.信息传递滞后 C.调速控制不准确 D.易受干扰信号影响 13. 螺旋桨的功率与主机转速及主机供油量与转速的关系分别为 A.立方,立方 B.立方,平方 C.平方,平方 D.平方,立方 14. 在主机遥控系统中,把车钟手柄从正车全速扳到倒车某速度挡,遥控系统首先进行的操作是 A.停油,降速 B.停油,制动 C.换向,制动 D.打开主起动阀 15. 在主机遥控系统中,现要在驾驶台操纵主机,则相应操纵部位转换阀的位置应该是*
电子科技大学————无线“hi” 无线遥控小车 设计人:李星辰2901303021 刘建彬2901303017 梁贵2901303019
目录 1.摘要 (2) 1.1中文摘要 (2) 1.2英文摘要 (2) 2.引言 (3) 2.1设计任务 (3) 2.2设计要求 (3) 2.3比赛规则 (3) 3.方案设计与论证 (4) 3.1系统方案 (4) 3.2方案论证 (4) 4.原理分析与硬件电路图 (6) 4.1电源转换部分 (6) 4.2电机驱动部分 (6) 4.3无线通信部分 (7) 4.4遥控部分 (8) 5.软件设计 (10) 6.系统测试与误差分析 (11) 7.结论 (12) 8.参考文献 (13) 9.附件 (13)
无线遥控小车 摘要为了达到设计的要求,我们使用了MSP430F149为车上主控制芯片,STC12C5A为遥控控制芯片。无线传输使用了315M无线传输模块,该模块采用了PT2262/PT2272进行编解码,拥有6位数据端管脚;遥控采用了摇杆电位器,将电位器滑动端的电压与参考电压比较,得到摇杆的位置,通过单片机编码,传输给小车上的单片机,小车上的单片机通过解码来控制小车的行驶及各种动作;电机驱动使用了L298N,通过单片机输出的PWM波来控制小车行驶的速度、小车行驶的方向;小车系统使用12V可充电锂电池进行供电,遥控使用9V的碳性电池进行供电,传输距离可达50m,抗干扰能力强,系统可靠稳定。 关键词无线遥控小车315MHz电波PWM波L298N Abstract In order to meet the design requirements for the vehicle we use the main control chip MSP430F149, STC12C5A for the remote controller. 315M wireless transmission using the wireless transmission module, the module uses PT2262/PT2272 for encoding and decoding, with 6-bit data-side pin; remote control using a joystick potentiometer, the potentiometer wiper voltage is compared with the reference voltage to obtain rocker position, through the microcontroller code, transmitted to the microcontroller small car, small car microcontroller to control the car by driving decoding and a variety of actions; motor drive using the L298N, the output of the PWM wave through the microcontroller to control the speed of car travel, car driving directions; car systems supply power to 12V rechargeable lithium battery, remote control with 9V battery powered carbon of the transmission distance up to 50m, anti-interference ability, reliable system stability. Keywords small wireless control car 315MHz Electromagnetic waves PWM waves L298N
课程设计任务书 机制6班区焯荣 200930510624 课题名称:遥控车转向机构设计及加工 课程设计目的: 随着CAD/CAE/CAPP/CAM技术的不断发展,其应用领域越来越广泛。为了使学生更好地掌握CAD/CAE/CAPP/CAM相关技术在设计及实际加工中的应用,特设计本课程设计。本课程设计知识覆盖面广,涉及到机械制图学、机械工程材料、机械设计、制造基础、模具设计及制造、数控加工工艺学、三维设计软件、工程设计美学、人机工程学等专业基础理论课的知识,以及产品装配的实践能力。通过本课程设计,学生能够熟悉应用所学知识结合先进的CAD/CAE/CAPP/CAM软件解决工程实际问题的方法,初步掌握零件设计,模具设计及加工的方法和步骤,培养严肃认真的科学态度,提高对所学知识综合运用的能力,培养团结协作精神,为走向工作岗位奠定基础。 1.课程设计的主要内容: 课题分析; CAD/CAE/CAPP/CAM软件产品设计模块的综合应用; 利用CAD/CAE/CAPP/CAM相关软件进行装配模型、分析模型、加工模型、模具模型等的设计,包括相应的计算公式和计算的具体步骤; CAD/CAE/CAPP/CAM相关软件在产品制造及模拟加工模块的综合运用。 整理课程设计说明书。
前言: 国内外遥控车多以双舵机(一种步进电机)加连杆控制方向,应外一种中低级的模型车采用单舵机自动回正的方式控制方向。 采取双舵机垂直放置,带动连杆水平移动的方式改变车轮的转向角度,这种方式是目前最为广泛采用的机构。 其优点有1、采用双舵机增加了力矩,使得轮子的转向力大大增强。2、结构稳定可靠。3、精确性高,动作迅速。 缺点是:成本较高,相应的配置必须跟随机构的强度而进行升级提升。如小车底盘要采用强度更高,韧性更好的材料,设计也要保证底盘两侧不会因为急速转向而破裂的情况等等。此外还有机构复杂、制造困难等的不足之处。 此外,如市场上常见的玩具车例如“雷速登”等小型模型车,采用的是单个舵机控制系统。
(汽车行业)汽车报警器工 作原理
汽车报警器工作原理 第壹起有文件记载的盗车案发生在1896年,距离汽车问世仅隔十年。因为汽车价格昂贵,易于转卖,而且便于盗车贼逃脱,所以百余年来,它壹直是盗贼最喜欢目标之壹。研究表明,仅在美国,每20秒就有壹辆汽车被盗。 Directed Electronics供图 “响尾蛇”汽车报警系统包括壹系列传感器和报警装置。 基于这个惊人的数字,数以百万的美国人购买昂贵的汽车报警器也就没有什么好奇怪的了。如今,几乎有50%的车辆装有精巧的电子传感器、警报器和远程激活系统,甚至在车轮上设置了高级防盗装置。 在本文中,我们将介绍壹些先进的汽车报警系统,让您了解它们的功能和原理。精密的现代汽车报警系统令人惊奇,但更令人称奇的是不论报警系统多么精巧,盗车贼总是有办法绕过它们。 基本原理 最基本的汽车报警系统壹般由壹个或多个传感器和和之相连的警报器组成。最简单的报警系统就是在驾驶员侧车门上安装开关且接好线路,如果有人开门,警报器就会鸣响。安装这种汽车报警系统需要壹个开关、几根电线和壹个警报器。 当下,多数汽车的报警系统要比这复杂得多。这些报警系统壹般包括: 壹组传感器,包括开关、压力传感器和运动探测器 能够发出多种声音的警报器,您能够从中选出壹种和众不同的声音 由密钥卡无线控制的无线电接收器 备用电池,在主电池断开的情况下也能够保证报警系统正常工作 计算机控制单元,也是报警系统的“大脑”,能够对周围的情况进行监控且发出警报 许多先进的报警系统的“大脑”实际上是壹台小型电脑。当传感器察觉到异常情况时,“大脑”就会合上开关,激活报警装置(即喇叭、车前灯或警报器)。不同的安全系统使用不同的传感器,而且传感器接入控制器的方式也不同。 控制器和报警系统壹般和车的主电池相连,通常仍配备有备用电源。如果有人切断主电源(如剪断电池线缆),这个隐藏的备用电源就会介入供电。电源被切断很可能是有人在盗车,此时控制器将启动且拉响警报。 在下文中,我们将了解不同类型的传感器,它们的工作原理,以及它们是如何和报警系统的控制器连接的。 车门传感器 汽车报警系统最基本的元件是车门传感器。如果有人打开处于完全保护下的车辆的引擎盖、行李箱或车门,控制器就会触发报警系统。 多数车辆报警系统采用的是已经安装在车门上的开关装置。当下的汽车非常方便,打开车门或行李箱时,内部照明灯就会点亮。其中的原理和冰箱照明开关很像。车门关闭时,将按下小型弹簧控制按钮或控制柄,断开电路。车门打开时,弹簧将顶起按钮闭合电路,使内部照明系统通电。 Directed Electronics供图 随身开关是手动开关,可暂时关闭告警系统(以便泊车员帮您泊
第四章主机遥控系统实例 在主机遥控系统中,驾驶台遥控主机必须是全自动的;集中控制室遥控主机可以是全自动的,也允许是半自动的。根据发送遥控主机信号的不同性质,遥控系统大致分三类:第一类是气动遥控系统。驾驶台发送的遥控信号是气动的,并经全自动的气动逻辑回路输出控制信号来操纵主机,集中控制室发送的气动遥控信号,可以与驾驶台共用一套气动逻辑回路,对主机进行全自动遥控。而有些遥控系统,为简化集中控制室的遥控线路,取消了驾驶台遥控的某些功能,通过扳动操车手柄来实现,如重复起动、程序负荷等。第二类是电一气结合的主机遥控系统。其中,集中控制室均采用半自动气动遥控系统,而驾驶台是采用电动遥控系统,驾驶台发送的是电的遥控信号,经电动逻辑回路处理后,再经电/气转换器转换成气压信号并由集中控制室的气动逻辑回路来操纵主机。驾驶台电动遥控系统有两种形式:一种是电动逻辑回路由继电器组成,称为电动有触点遥控系统;另一种是电动逻辑回路由电子器件,如逻辑门电路和运算放大器组成,称为电动无触点遥控系统。它们与集中控制室气动逻辑回路合在一起,分别称为有触点电一气结合遥控系统和无触点电一气结合遥控系统。第三类是用微型计算机组成的遥控系统。集中控制室仍采用半自动气动遥控系统,驾驶台发送的也是电动遥控信号。其实它也属于电一气结合的遥控形式,所不同的是,其逻辑回路不是由硬件电路组成的,而是由计算机软件程序实现的。 近年来,采用变距桨作为推进装置的船舶有所增加,特别是对于负荷变化较大的工作船及某些滚装船较多采用变距桨。主机驱动定距桨和驱动变距桨的工作方式是完全不同的,因此,主机遥控系统的功能和组成差异较大。第三章所介绍的各种逻辑回路,主要是对驱动定距桨主机而言的,有些是不适合于变距桨的。限于篇幅,这里将不再介绍驱动变距桨的主机遥控系统。 在实际应用中,主机遥控系统的形式是多种多样的。尽管它们的基本逻辑功能是相同的,但各种逻辑回路的组成方式、回路之间的连接方式,以及某些逻辑回路的实现方法等都各不相同,不可能以一概全。本章的目的是,通过介绍一些典型主机遥控系统的实例,掌握分析一个复杂的实际遥控系统线路的思路和方法,为管理使用好遥控系统打下良好的基础。 第一节气动主机遥控系统 气动主机遥控系统的类型很多,但70年代中期,由德国“西门子”公司生产并装配在MAN-V-40/54A型柴油机上的气动遥控系统具有一定的典型性。MAN-V-40/54A型柴油机主机是可逆转四冲程中速机,采用双凸轮换向。该主机可在驾驶台遥控,也可在集中控制室遥控,它们是共用一套由气动阀件组成的各种逻辑回路和控制回路实现的。所有阀件分装在A、H、M三个阀箱中,其中A箱是起动控制箱;H箱是转速控制箱;M是机旁件箱。现介绍这种遥控系统的组成、功能及各种逻辑回路的联系。 一、气源装置及操纵部位转换 1、气源装置
学习项目十四汽车充电系统 情景描述 一辆威志V2轿车,进入修理厂,客户反映该车发动机起动后,电不足,灯光发暗, 喇叭不够响,经检查诊断为汽车充电系统不正常充电,造成蓄电池过放电,电压不足。 学习目标 「知识目标 1.了解汽车充电系统电路的结构特点; 2.懂得汽车充电系统电路的控制原理; 3.熟悉汽车充电系统电路的技术要求。 技能目标 1.掌握发电机的拆装步骤; 2.掌握发电机性能的检测方法。 学习内容 1.就车检查充电系统; 2.规范拆卸发电机; 3.检查发电机传动带; 4.更换、安装发电机。 建议课时数 20 因学习过程 一、学习任务 能根据维修手册规范对充电系统进行就车检测,并对充电系统出现故障排除进行。 故障排除后启动车辆,汽车能正常运转。
二、资料收集 1.充电系统的作用 当今世界科学技术迅猛发展,极大地促进了汽车技术的高速发展,同时人们对汽车的舒适性、安全性、可靠性的要求也在不断的提高,这也促进了汽车电子设备装置的发展。因此,对充电系统的要求也就越来越高,是现代汽车技术发展标志之一。随着汽车上用电设备的急剧增加,充电系统的作用越来越重要。充电系统的作用是供全车用电, 同时向蓄电池充电(储存多于的电能),以补充蓄电池在启动时电能的消耗,如图14-1 所示。 图14-1 充电系统的作用 2.充电系统的认识 汽车充电系统由蓄电池、交流发电机及工作状态指示装置组成,采用并联方式连接。 汽车上所用的交流发电机主要由一台三相交流发电机和整流器组成。 3.交流发电机的结构原理 (1)结构组成 发电机的结构组成,如图14-2所示。
图14-3 充电系统工作原理图 IA 17 1S 16 11 1-螺母;2-皮带轮;3-隔圈;4-前端盖总成;5-前轴承; 圈;9-后轴承;10-轴承盖;11-定子总成;12-紧固螺栓; 6-轴承盖;7-轴承盖螺栓;8-转子线 13-密封件;14-整流器总成;15-双 头螺栓;16-电刷架总成;17-电刷支架螺栓;18-滑环导轨;19-后端盖 图14-2 发电机结构组成图 (2) 工作原理 发电机工作原理如图14-3所示。 i U 13 1> 调节器调节电压为 输出恒定电流 断开和接通励磁绕组电流
关于汽车防盗报警系统的认识 在当今市场中,汽车防盗报警系统比较常见。它在汽车装饰美容上经常可以看到其实型,从其发展过程来看,已经走向了成熟。从人们对安全的认识来看,它是防止汽车被盗的基本方法。 汽车防盗报警系统是有主机、遥控器、传感器、LED警示灯、语音喇叭、线束、天线组成。它的主机就相当于人的大脑一样,对其系统起到限制的作用并且会处理信号,使其于各个部分相互连接,发挥作用。遥控器起到发射信号的作用其信号被主机接收到,此时会通过传感器来传输信号和输出信号,从而完成了接收信号,处理信号,发出信号的过程。在通过线束,到达控制的部位:警示灯、语音喇叭,那么能指标不同的产品其性能是有差异的。比如说铁将军中的金钻汽车防盗报警系统就达到了报警的作用。这就是总的作用形式。 汽车防盗报警系统的性能的工作电压是12V,其静态电流小于20V ,工作频率是433.92 MHZ,防盗喇叭声级是85——105dB。在几个性能中最后一个是不同的,因为有了它的不同,致使工作电压和静态电流的不同。 不同的车型,不同的公司都会对产品的要求不同的,其中的不同的车型他要求的产品的安装方式不同。在汽车的电路图中,他的线束是非常多的,而对于不同的车他的电路连接又有很大的差别。所以在安装防盗报警系统的时候,对于安装工人来说,他们需要很长时间去排查,然后确认之后再去安装。这一步,是非常难的,要学会安装必需经过很长的实践,所以对于汽车美容装饰公司而言,要教会一个人
需要2—3年的时间。其中对产品的设置时公司的事情,它可以设置为电动锁,不自动投入,防抱不熄火,边门正触发。当然了,也可以汽车防盗报警器的安装分为以下几个步骤:进行混合的使用,这就在于不同公司的生产过程的设定了。 1.传感器的安装 它安装于仪表台下方并紧贴车体,其组成有两大分:(1)一个灵敏度旋转调节钮,将其顺时针旋转时提高灵敏度,相反的,当逆时针时应是降低了它的灵敏度;(2)一个红灯,当受到震动时灯亮,从而检验其灵敏度. 2.”中控锁”安装 此步骤的进行时比较关键的一步,因为汽车防盗系统的关键就是此再起作用.它的不步骤如下: (1)原车配有电动中央控制门锁,在安装时需要判别是正触发 或负触发. (2)原车配有电动中央控制门锁,但驾驶座门锁无马达驱动(其 余三扇车门均有马达),只要在驾驶座 (3)原车配有气动中央控制门阀,防盗器主机内有条线选择,可将条线短路器插在“气动”位。 (4)原车门锁无动力驱动,应在加装一套中控制马达。 4.“语音喇叭”接线 安装喇叭时,喇叭口向下倾斜,以防止漏水。 5.“尾门负触发”接线
遥控小车设计说明书 作品内容简介 本概要设计说明书是针对电子设计的课程要求而编写。目的是对该项目进行总体设计,在明确系统需求的基础上划分系统的功能模块,进行系统开发的分工,明确各模块的接口,为进行后面的详细设计和实现做准备。满足无线遥控爱好者对智能小车的设计要求,想通过这份概要设计给爱好者一个好的设计思路,设计方法进行参考。 本课题设计的遥控玩具车主要有三大模块组成:无线发射模块、无线接收模块和驱动模块。我们的设计以mega16芯片为核心,无线遥控发射/接收模块为315模块,驱动芯片为L298N 。驱动电动机正反转的电路连接无线遥控接收电路构成一个驱动模块驱动电动机的前进、后退、左转和右转和各种微调控制。 经过实践证明,我们的设计可以很好的实现题目给出的要求,并且在其要求上我们又进一步进行了完善,是设计具有更好的实用和参考价值。 关键字:mega16芯片, L298N 芯片, 315无线发射/接收模块, PT2262,PT2272 1、研制背景及意义 面向所有无线遥控爱好者,对智能小车感兴趣,想借此提高动手能力的用户。 随着电子技术、计算机技术和制造技术的飞速发展,数码相机、DVD 、洗衣机、汽车等消费产品越来越呈现光电机一体化、智能化、小型化等趋势。各种智能化小车在市场玩具中也占一个很大的比例。 因此,遥控加职能的技术研究、应用都是非常有意义而且有很高的市场价值的。只能小车,也称轮式机器人,是一种以汽车电子为背景,涵盖控制、模式识别、传感技术、电子、计算机、机械等多学科的科技创新性设计,一般主要由路径识别、速度采集、角度控制及车速控制等模块组成。本次课题准备设计一种单片机电路实现小车具有前行、左转向、右转向、后退四个功能的只能小车。 2、设计方案 图1-1 3、工作原理与性能分析
汽车防盗报警系统的工作原理与检修详解 一、检修前的准备工作 检修汽车防盗报警器所需的工具仪器 检修汽车防盗报警器除了一些常用的工具,除偏嘴钳、尖镊子、大小十:宇螺钉旋具感螺钉旋具、医用针头、电烙铁和万用表外,还应具备以下几种工具仪器。 1.提供报警器维修时的供电电源汽车防盗器有故障,必须从车辆上拆下来进行维修,因此,维修稳压电源是必备的仪器之一。一般选用输出直流电压在0~24V之间连续可调,输出电流在2A以上的直流稳压电源即可,这些稳压电源都是双表头输出显示,并有过电流保护功能,使用较安全。如使用自制稳压电源,最好加有过电流保护电路或能显示输出电流。 2.示波器示波器用20MHz单、双踪的示波器均可以。主要用来观察防盗器主机中CPU 的时钟振荡、遥控接收振荡、解调后的脉冲波形、遥控器的脉宽调制波形、发射管振荡波形等,当然也可以用来测交、直流电压等等。在不具备频谱仪的条件下,示波器是不可缺少的仪器。 3.自制检修工装汽车防盗报警器是集各种报警功能检测输入和各种控制功能输出的多附件报警系统,所有附件都安装在汽车上,有些附件就是车辆本身的电‘气部件,检修报警器时,不能将系统附件也一同拆下。因此,自制检修工装,也是修理汽车防盗报警器的一项前期准备工作。 检修工装就是用指示灯或LED发光管指示各种控制动作,用开关来模拟各种检测输入量。通过拨动相应的开关,观察防盗器在不同状态指示灯的变化情况,既直观又明了。 各种控制动作用LED发光二极管显示,为了便于识别,可以选用不同颜色的发光二极管。将LED发光二极管并排插在一小块长条形硬纸板或废电路板上,在每个发光二极管下边注上代表的控制功能,引出线用不同的颜色分组输出,以便于识别,限流电阻串在线材上,用绝缘胶布缠好。模拟量用的开关选用小型推式自锁开关,开关可以串接在引出线的中部,用绝缘胶布包好,在开关上贴上文字标识,就可以正常使用了。 当然,如读者有兴趣,可以用12V仪器指示灯作控制显示,用拨动开关作模拟量控制,将它们直接固定到PVC面板上,用铝合金做框,采用电脑刻字文字标识,一台较正规的维修检测工装就完成了。
课程设计任务书 机制6班区焯荣200930510624 课题名称:遥控车转向机构设计及加工 课程设计目的: 随着CAD/CAE/CAPP/CAM术的不断发展,其应用领域越来越广泛。为了使学生更好地掌握CAD/CAE/CAPP/CA相关技术在设计及实际加工中的应用,特设计本课程设计。本课程设计知识覆盖面广,涉及到机械制图学、机械工程材料、机械设计、制造基础、模具设计及制造、数控加工工艺学、三维设计软件、工程设计美学、人机工程学等专业基础理论课的知识,以及产品装配的实践能力。通 过本课程设计,学生能够熟悉应用所学知识结合先进的CAD/CAE/CAPP/CA软件解决工程实际问题的方法,初步掌握零件设计,模具设计及加工的方法和步骤,培养严肃认真的科学态度,提高对所学知识综合运用的能力,培养团结协作精神,为走向工作岗位奠定基础。 1.课程设计的主要内容: 课题分析; CAD/CAE/CAPP/CAM件产品设计模块的综合应用; 利用CAD/CAE/CAPP/CA相关软件进行装配模型、分析模型、加工模型、模具模型等的设计,包括相应的计算公式和计算的具体步骤;CAD/CAE/CAPP/CAM关软件在产品制造及模拟加工模块的综合运用。 整理课程设计说明书。
.、八、- 刖言: 国内外遥控车多以双舵机(一种步进电机)加连杆控制方向,应外一种中低 级的模型车采用单舵机自动回正的方式控制方向。 采取双舵机垂直放置,带动连杆水平移动的方式改变车轮的转向角度,这种 方式是目前最为广泛采用的机构。 其优点有1、采用双舵机增加了力矩,使得轮子的转向力大大增强。2、结构稳定可靠。3、精确性高,动作迅速。 缺点是:成本较高,相应的配置必须跟随机构的强度而进行升级提升。如小车底盘要采用强度更高,韧性更好的材料,设计也要保证底盘两侧不会因为急速转向而破裂的情况等等。此外还有机构复杂、制造困难等的不足之处。 此外,如市场上常见的玩具车例如“雷速登”等小型模型车,采用的是单个舵机控制系统。
项目 汽车防盗系统 随着社会的进步、科学技术的发展和汽车保有量的不断增 加,为了防止车辆被盗,出现了一种系统就是在车辆遭受非法入侵时,可以实现报警。同时即使有人将车门非法打开并起动发动机,由于转向盘被锁止,汽车不能实现转向,故不能将汽车开走,于是起到了汽车的防盗作用。 本项目知识目标: 1.了解汽车防盗系统的组成和原理。 2.掌握桑塔纳2000轿车的防盗系统的结构、原理。 本项目能力目标: 1、了解汽车防盗系统的基本组成。 2.掌握桑塔纳2000轿车的防盗系统基本知识。 防盗系统的组成及原理 随着电子技术的发展,在原有中央门锁的基础上,又 发展到现在的电子门锁、微机控制的带自动报警的防盗 系统、电子密码点火(钥匙)锁等,使汽车门锁实现了电子控制。 1、汽车防盗系统有什么作用? 2、汽车防盗系统如何进行防盗控制? 一、 汽车防盗系统的组成 狭义的防盗系统主要是指一些防盗设备,如各种防盗 锁和各类报警器,广义的防盗系统应包括中控门锁、 发动机控制单元和报警系统。特别是汽车先进的门锁
控制系统和发动机控制单元是先进的防盗系统不可或缺的一部分。 最基本的汽车防盗系统如下图所示,通常包括三个部分:报警启动/解除操作部分、控制电路部分、执行机构部分。 点火开关首先启动防盗系统,接着由装在各类开关上的各类传感器检测是否出现非法进入汽车并开始启动发动机或非法搬运汽车的情况。当探测到汽车出现异常时,防盗控制ECU向执行机构部分发出命令,一方面要求其发出报警信号,包括尖锐的警示声音和灯光闪烁,另一方面要求其阻止启动机和发动机运转,使汽车失去运动能力。 二、汽车防盗系统的分类 汽车的防盗系统主要有两类,一类是汽车原配的防盗系统,另一类则是附加的防盗设备。各种高级轿车一般都配有原装防盗系统,而且这类防盗系统都采用了最新的技术,如射频识别技术(RFID)。对于普通的汽车来讲如果防盗系统不完善的话,车主会自己装备一些防盗设备。 汽车防盗装置按其发展过程可分为机械式防盗系统、电子式防盗系统、芯片式防盗系统和网络式防盗系统四个阶段。 (一)机械式防盗系统 机械式防盗装置是靠机械防盗坚固的金属材质—机械锁,来锁止汽车的操纵装置(离合、制动、油门或转向盘、变速器操纵杆等)和车轮,如转向盘锁、变速手柄锁、拐杖锁、轮胎锁等,只防盗不报警。 机械式防盗锁的价格便宜、安装简便,但这类防盗器材只能起到限制车辆操作的作用而不能报警,故对防盗方面能够提供的帮助有限,现在已经很少单独使用,主要和另两类防盗系统联合使用。
学习项目十四汽车充电系统 1.了解汽车充电系统电路的结构特点; 2.懂得汽车充电系统电路的控制原理; 3.熟悉汽车充电系统电路的技术要求。 技能目标 1.掌握发电机的拆装步骤; 2.规范拆卸发电机; 3.检查发电机传动带; 4.更换、安装发电机。 一、学习任务 能根据维修手册规范对充电系统进行就车检测,并对充电系统出现故障排除进行。故障排除后启动车辆,汽车能正常运转。 二、资料收集
1.充电系统的作用 当今世界科学技术迅猛发展,极大地促进了汽车技术的高速发展,同时人们对汽车的舒适性、安全性、可靠性的要求也在不断的提高,这也促进了汽车电子设备装置的发展。因此,对充电系统的要求也就越来越高,是现代汽车技术发展标志之一。随着汽车上用电设备的急剧增加,充电系统的作用越来越重要。充电系统的作用是供全车用电,同时向蓄电池充电(储存多于的电能),以补充蓄电池在启动时电能的消耗,如图14-1所示。 图14-1 充电系统的作用 2.充电系统的认识 汽车充电系统由蓄电池、交流发电机及工作状态指示装置组成,采用并联方式连接。汽车上所用的交流发电机主要由一台三相交流发电机和整流器组成。 3.交流发电机的结构原理 (1)结构组成 发电机的结构组成,如图14-2所示。
1-螺母;2-皮带轮;3-隔圈;4-前端盖总成;5-前轴承;6-轴承盖;7-轴承盖螺栓;8-转子线圈;9-后轴承;10-轴承盖;11-定子总成;12-紧固螺栓;13-密封件;14-整流器总成;15-双头螺栓;16-电刷架总成;17-电刷支架螺栓;18-滑环导轨;19-后端盖 图14-2 发电机结构组成图 (2)工作原理 发电机工作原理如图14-3所示。 图14-3 充电系统工作原理图
车辆锁止防盗系统工作原理 及其防盗性能分析 [摘要] 车辆电子锁止防盗系统通过锁止发动机来防止汽车被盗,其核心是射频识别技术。射频识别转发器投入少,安全性很高。本文介绍了动态加密转发器防盗系统的工作原理和安全性。 关键词:车辆锁止系统防盗射频识别转发器收发器 [Abstract] RFID transponders can provide a high level of security at low cost. This article describes the system approaches for the immobilizer systems. It compares the various security levels and gives an overview about the crypto-transponders. Keywords:electronic immobilizer RFID transceiver transponder 1.简介 二十世纪九十年代初,世界范围内的汽车被盗案件迅速增长使各大保险公司再也难以承受,呼吁汽车制造商研究开发新的汽车防盗系统。在很短的时间里,各汽车制造商开发生产了各种各样的系统来防止盗贼进入或开动汽车。依据消费者的偏爱各国选择的实现方法各不相同,无钥匙遥控系统在美国和法国较为流行,而在德国对用户透明的系统则应用较广。由于射频识别技术(RFID)早已在其它工业领域得到了应用,性能出色,大多数汽车制造商选用了基于RFID技术的小型无源转发器来实现安全系统,以便尽可能减少投资。 从1995年开始欧洲市场上几乎所有型号的汽车都装备了原配的车辆电子锁止防盗系统。德国保险公司的统计分析证明这一系统取得了巨大的成功,装有车辆电子锁止系统的汽车被盗的数量要比没装备该系统的要少得多。 2.车辆电子锁止防盗系统概述 基于钥匙的电子防盗锁止系统主要由四部分组成(图1)。系统的核心是转发器(transponder),它是一种无源装置,使用过程中,转发器需由外部能源提供能量。车载的收发器(transceiver)通过天线线圈产生高频磁场,磁场能量激活转发器,其利用调制射频信号发送数据流。射频信号被收发器接收、解调得到数据流并传送到系统控制单元进行处理。防盗系统控制单元与汽车发动机管理计算机配合实理对发动机的锁止与启动。 市面上的射频识别系统物理原理各不相同,但从传送能量而言,可分为两类: ●全双工系统. 收发器与转发器之间能量传输与数据传送同时进行。 ●半双工系统. 能量与数据顺序传送。转发器利用电容器存储能量,当发射器 (transmitter)停止时再传送数据。 两种不同的技术对系统设计、工作距离及可靠性有影响,但不会对系统安全性造成影响。
4-1 主机遥控系统基本概念 1、主机遥控系统从结构上看应包括: ①工况检测单元②安全保护装置③遥控装置④遥控操纵台⑤机旁操纵及执行机构 ⑥参数调整单元 A.①②③⑤ B.①③④⑥ C.②③⑤⑥ D.②③④⑤ D 2、在主机遥控系统的功能中,应包括: A.主机滑油压力的监视与报警 B.主机转速的自动调节 C.主机冷却水温度的自动调节 D.燃油滤器的自动清洗 B 3、以下不属于主机遥控系统的功能是: A.系统模拟功能 B.安全保护功能 C.应急操作功能 D.人员舒适功能 D 4、主机遥控系统安全保护及紧急操纵功能通常包括: ①应急运行②机旁应急操纵③自动报警 ④应急停车⑤主机故障自动减速及停车控制⑥最大油量限制 A.①③⑤⑥ B.①②④⑤ C.②③④⑥ D.②③⑤⑥ B 5、在主机遥控系统中,逻辑程序控制功能通常包括: ①停车时的换向控制②正常起动控制③重起动控制 ④慢转起动控制⑤转速与负荷控制⑥机旁应急操纵 A.①③④⑤ B.①②③④ C.②③④⑥ D.②③⑤⑥ B 6、目前最常见的主机遥控有哪几种类型:①机械遥控系统②液压遥控系统③气动遥控系统④电动遥控系统⑤电-气式遥控系统⑥微机型遥控系统 A.①②③④ B.②③④⑤ C.③④⑤⑥ D.①③④⑤ C 7.全气动主机遥控系统的缺点是: A.易受振动影响 B.管理复杂 C.易受温度影响 D.可能产生滞后现象 D 8.电动主机遥控系统的错误提法是: A.信号传递有延迟 B.容易组成各种逻辑控制回路 C.执行机构输出力或力矩较小 D.管理要求较高 A
9.主机遥控系统安全保护及紧急操纵功能通常包括 ①应急运行②机旁应急操纵③自动报警 ④应急停车⑤主机故障自动减速及停车控制⑥最大油量限制 A.①③⑤⑥ B.①②④⑤ C.②③④⑥ D.②③⑤⑥ B 10、主机操纵部位选择的优先级是 A.(1)驾驶室(2)集控室(3)机旁 B.(1)集控室(2)驾驶室(3)机旁 C.(1)机旁(2)集控室(3)驾驶室 D.(1)机旁(2)驾驶室(3)集控室 C 11、在主机遥控系统中,现要在驾驶台操纵主机,则相应操纵部位转换阀的位置应该是 A.机旁转换阀应扳到应急位,集中控制转换阀应扳到机控位 B.机旁转换阀应扳到应急位,集中控制转换阀应扳到驾控室 C.机旁转换阀应扳到自动位,集中控制转换阀应扳到机控位 D.机旁转换阀应扳到自动位,集中控制转换阀应扳到驾控位 D 12.在主动遥控系统中,驾驶台与集中控制室操纵部位转换时做到无扰动切换的条件是 A.两处手柄都在停车位置 B.两处手柄在同一方向即可 C.两处手柄在同一方向,且设定转速相等 D.两处手柄非同一分享,且设定转速相等 C 13.主机遥控系统从结构上看应包括______。 ①遥控操纵台;②安全保护装置;③程序控制箱;④工况检测单元;⑤机旁操纵及执行机构;⑥参数调整单元。 A ①②③⑤ B ①③④⑥ C ②③⑤⑥ D ②③④⑤ A 14.主机遥控系统依据所用元、部件类型,主要分类为______。 ①气动式主机遥控系统②转矩的限制主机遥控系统③电一气混合式主机遥控系统④微机式主机遥控系统⑤电动式主机遥控系统⑥自动组合式主机遥控系统 A ①②④⑤ B ①③④⑤ C ②③⑤⑥ D ②③④⑤ B 15.主机遥控系统的负荷限制功能包括______。 ①螺旋桨特性限制②转矩的限制③最低稳定转速限制④起动油量的设置⑤增压空气压力限制⑥临界转速自动回避 A ①②④⑤ B ①③④⑤ C ②③④⑤ D ①③④⑥ A 16.在主机遥控系统中,现要在驾驶台操纵主机,则相应操纵部位转换阀 的位置应该是______。 A 机旁转换阀应扳到应急位,集中控制转换阀应扳到机控位