
模糊自整定PID 控制系统设计与仿真
—— 俯仰姿态保持模糊PID 控制
一、目的
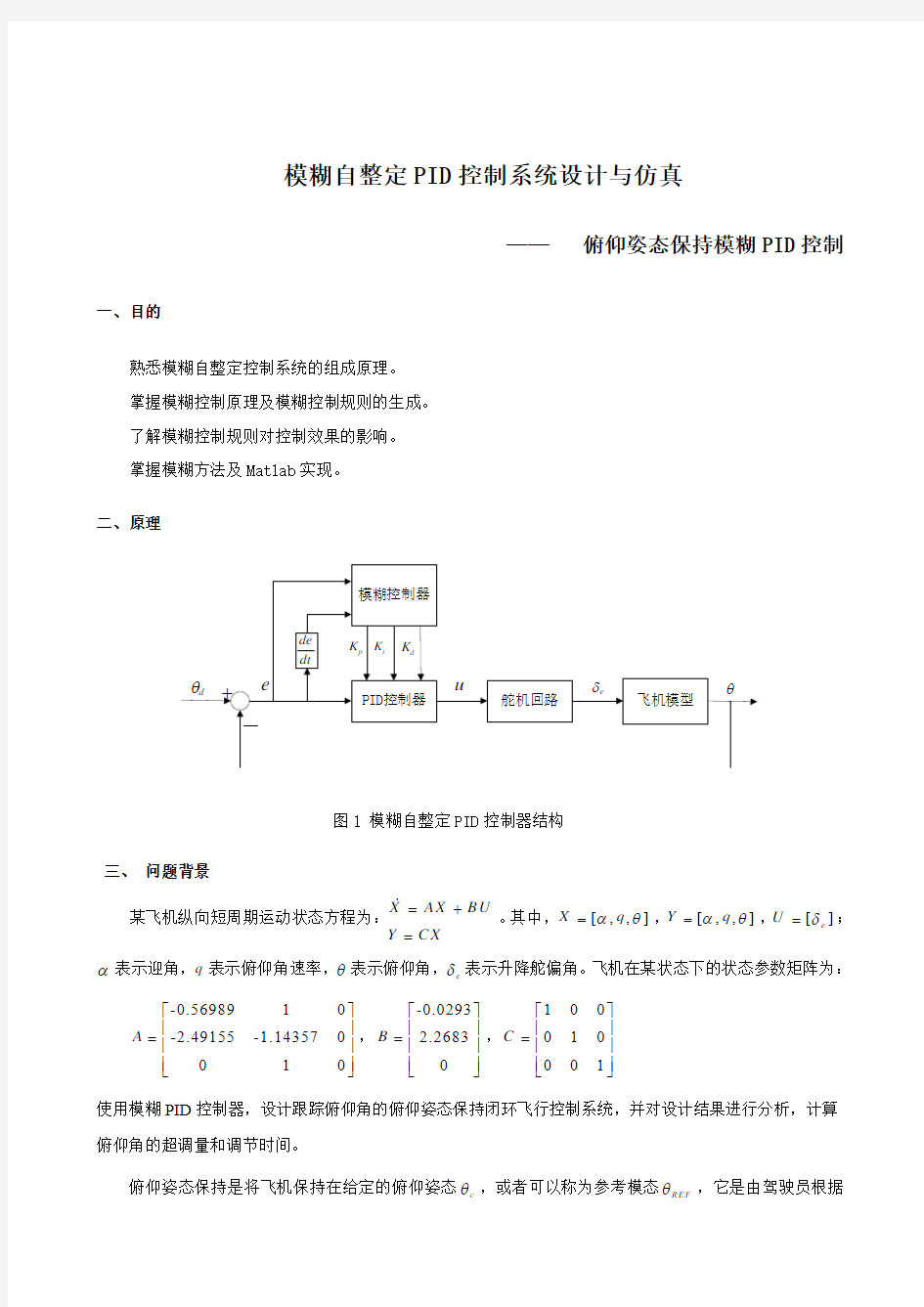
熟悉模糊自整定控制系统的组成原理。 掌握模糊控制原理及模糊控制规则的生成。 了解模糊控制规则对控制效果的影响。 掌握模糊方法及Matlab 实现。 二、原理
图1 模糊自整定PID 控制器结构
三、 问题背景
某飞机纵向短周期运动状态方程为:
X
A X
B U Y
C X
=+= 。其中,[,,]X q αθ=,[,,]Y q αθ=,[]e U δ=;
α表示迎角,q 表示俯仰角速率,θ表示俯仰角,e δ表示升降舵偏角。
飞机在某状态下的状态参数矩阵为: -0.56989
10-2.49155
-1.14357
001
0A ???
?=?????
?,-0.02932.26830B ????=??????,1
000100
1C ??
??=?
?????
使用模糊PID 控制器,设计跟踪俯仰角的俯仰姿态保持闭环飞行控制系统,并对设计结果进行分析,计算俯仰角的超调量和调节时间。
俯仰姿态保持是将飞机保持在给定的俯仰姿态c θ,或者可以称为参考模态REF θ,它是由驾驶员根据
某种飞行状态(水平飞行、爬升、下滑)的需要而建立的,控制系统接通后就力图保持这种姿态为常值,其原理框图如图所示。
俯仰姿态保持框图
该模态的主要被控变量是俯仰姿态角,传感器是一个姿态参考陀螺。其本身一般只在飞机水平飞行状态和短时间下滑、爬升状态下使用。由于攻角会随飞行状态发生变化,所以在该模态下航迹倾斜角不会保持常值。于是,如果增加推力,α将有降低的趋势,并且飞机会爬升;随着飞机重量的减轻,α也会减小,也会引起飞机逐渐爬升。类似地,随着空气密度的降低引起α增加,爬升的飞机会逐渐改平。将俯仰姿态角作为被控变量,除了能改变飞行轨迹之外还能用来改变空速。由于这些特性,俯仰姿态保持常作为其它工作方式的基本控制器。例如飞机在各种不同高度巡航飞行、稳态爬升及自动着陆时,都要求保持相应的俯仰姿态角,继而达到控制和保持所要求的飞行轨迹的目的。
四、基于模糊规则的PID控制
模糊控制器,也称为模糊逻辑控制器,由于所采用的模糊控制规则是由模糊理论中模糊条件语句来描述的,因此模糊控制器是一种语言型控制器,故也称为模糊语言控制器。其结构如图:
事先,我们选取一基本PID控制器,经过反复试验,调整得到一组较好的PID参数,Kp=20,Ki=0.1,
Kd=4,其响应曲线如图:
可见,此时的基本PID控制器已经具有较好的控制效果,但是,这已经是极限,继续调整基本PID 参数,已经很难提高系统性能。现在,通过加入模糊控制器,我们希望能够在此基础上得到更好的效果。针对本问题,采用二输入三输出的模糊控制器,其设计主要包括模糊化,模糊推理,解模糊三个过程。
1.模糊接口设计
输入量选取误差E和误差变化率EC,输入量和输出量的模糊语言值均分为七档
2.模糊规则的制定
通过查阅参考文献,E和EC输入的PID控制器,参数变化的影响一般为:
(1)Kp增减振荡周期减小,超调增加,上升时间减小;
(2)Ki则增加则超调/回调比增加,稳定性下降;
(3)Kd增大则稳定性增强。
为了正确的控制输出量,据此得到如下模糊控制规则:
(1)在偏差较大时,为尽快消除偏差,提高响应速度,KP取大值,KI取零;在偏差较小时,为继续消除偏差,并防止超调过大,产生振荡,KP值要减小,KI取小值;在偏差很小时,为消除静差,克服大超调,使系统尽快稳定,KP值继续减小,KI值不变或稍取大一点。
(2)当E和EC同号时,被控量是朝着偏离给定值的方向变化,而当E和EC异号时,被控量朝着接近给定值的方向变化。因此,当被控量接近给定值时,反号的比例作用阻碍积分作用,避免积分超调及随之带来的振荡,有利于控制;而当被控量远未接近给定值并向给定值变化时,则由于这两项反
向,将会减慢控制过程。在偏差E 较大,偏差变化EC 与偏差E 异号时,KP 值取零或负值,以加快控制的动态过程。
(3)偏差变化EC 的大小表明偏差变化的速率,EC 越大,KP 取值越小,KI 取值越大,反之亦然。 (4)微分作用类似于人的预见性,它阻止偏差的变化,有助于减小超调,克服振荡,使系统趋于稳定,加快系统的动作速度,减小调整时间,改善系统的动态性能。因此,在E 较大时,KD 取零,实际为PI 控制;在E 较小时,KD 取一正直,实行PID 控制。
因此,模糊规则表如下:
I K 控制表
D K 控制表
3.解模糊
解模糊采用最大隶属度法,输出关系如下:
采用Simulink,仿真图如下:
运行结果:
图中,实线为基本PID控制器的响应曲线,虚线为模糊自整定PID控制器的响应曲线。由图可以看出,采用模糊PID控制后,输出在接近给定值时,震荡变小,稳定速度更快。但是并不明显。因此考虑进一步改进。
以上过程中,误差E和误差变化率EC的隶属度函数都是默认的均匀分布,我们可以考虑压缩稳定状态(E和EC均接近于零值Z)所占得比例,使得系统在更多的时候落入误差及变化率较大的判定区域,相应的控制量将更加强力,从而提高系统的敏感性和响应速度,而当系统误差较小时,对应的模糊PID控制仍然有效,从而保证系统的稳定性不至于受到影响。也就是说,通过采用非均匀的输入隶属度函数,来同时提高系统的敏感性,稳定性,及响应速度。调整后的输入隶属度函数为:
误差E隶属度函数误差EC隶属度函数
调整后的运行结果为:
图中实线为基本PID控制器的响应曲线,虚线为模糊自整定PID控制器的响应曲线。由图可以看出,系统的响应速度和稳定性有明显提高。
六、思考
1.不同的解模糊方法对控制效果有什么影响?
答;不同的解模糊方法所能表达的输出隶属度函数计算结果的精细程度不同,体现的信息量也不同。最大隶属度法只考虑了影响输出的主要因素,较为粗略,相对而言,其他解模糊方法比如重心法,平均最大隶属值法,中位数法等,考虑的信息更多,输出也更加平滑,但是这是以更大的计算量为代价的。针对本问题,考虑到实时性,采用最大隶属度法较为合适,实验表明,其精度也是可以满足要求的。
2.模糊控制达到稳态后,静差是否为零?为什么?
答:一方面,模糊控制中的输入误差和误差变化率的零表示的是误差较小的一段区间,而不是准确的一个点。凡是落入区间内的误差,都会被不加区分的视为误差已经为零,采用同一组模糊输出而无法精细区别;另一方面,PID控制器是一种误差驱动的控制器,有误差才有调整量,随着调整的进行,误差逐渐减小,但相应的控制量也越小,当误差非常接近于零值时,控制量已经几乎衰减为零,已经无法进一步减小误差。,除非初始误差直接为零并且一直保持。考虑到系统随机误差的干扰,一般无法使得静差为零。但是,这不妨碍我们为不断减小静差而努力。