《Driving Torque Control Method for Electric Vehicle with In-Wheel Motors》
读后感
本篇论文主要讲述了电动汽车轮内马达的转矩控制方法,作者的论文主要从汽车模型、转矩控制、仿真、实验四大部分对这一主题进行了阐述,其中,转矩控制部分是整篇论文的重心。
在转矩控制这一部分,作者分别从驱动转矩控制的输入控制、驱动转矩控制系统的配置、对驱动转矩控制系统从启动到静止状态的考虑、带有偏航力矩抑制的驱动转矩控制系统、驱动转矩观测器、车轮速度控制系统、以及增益设计来进行论证。
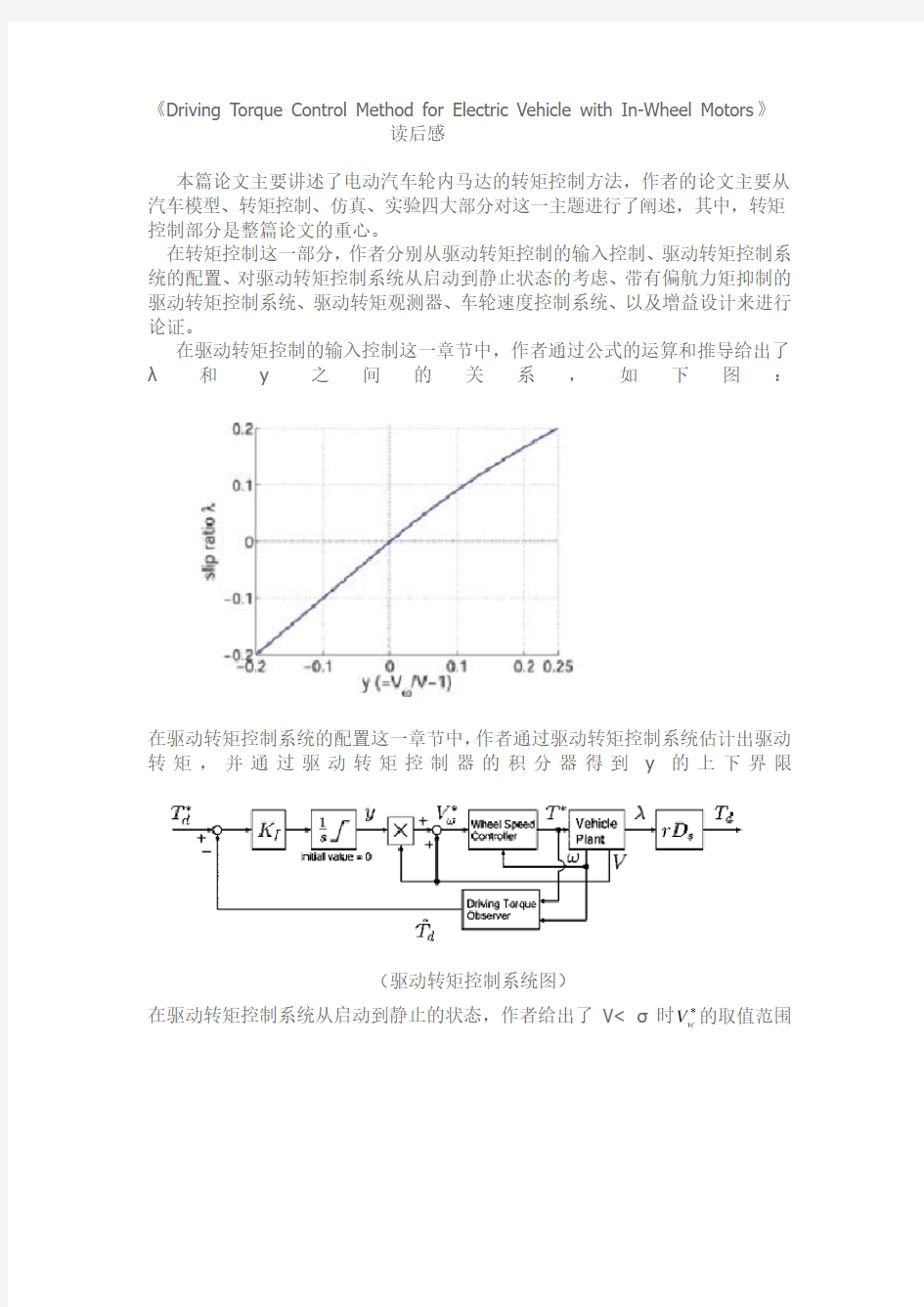
在驱动转矩控制的输入控制这一章节中,作者通过公式的运算和推导给出了λ和y之间的关系,如下图:
在驱动转矩控制系统的配置这一章节中,作者通过驱动转矩控制系统估计出驱动转矩,并通过驱动转矩控制器的积分器得到y的上下界限
(驱动转矩控制系统图)
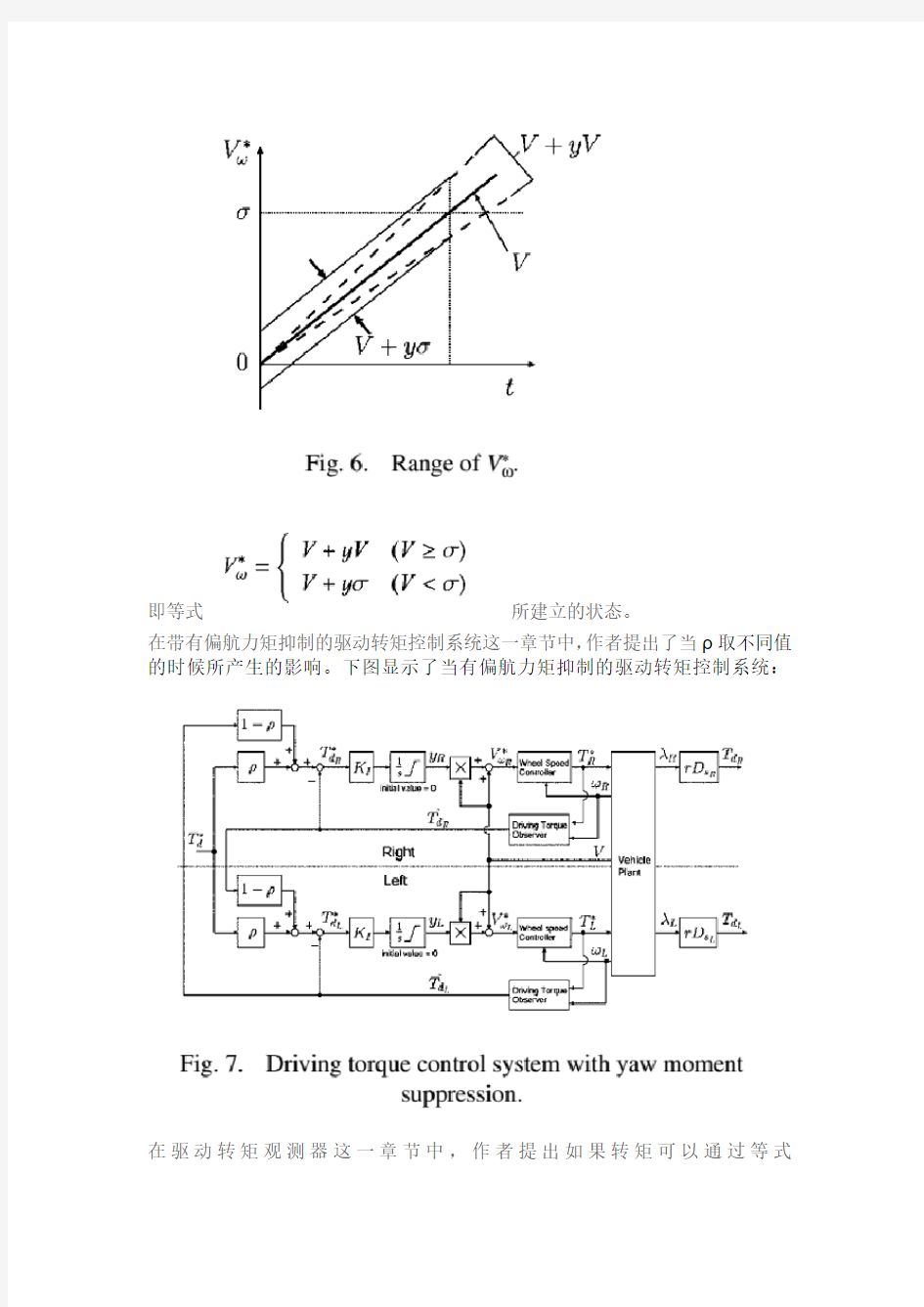
在驱动转矩控制系统从启动到静止的状态,作者给出了V< σ时
V的取值范围
w
即等式所建立的状态。
在带有偏航力矩抑制的驱动转矩控制系统这一章节中,作者提出了当ρ取不同值的时候所产生的影响。下图显示了当有偏航力矩抑制的驱动转矩控制系统:
在驱动转矩观测器这一章节中,作者提出如果转矩可以通过等式
获得并且角速度也是可以检测到的,那么驱动转矩观测器便可以创建出下图:
对于增益设计的环节,作者给出了传递函数同
时,这个传递函数的极点:
在仿真实验中,作者得出如下结论:稳定传动力矩和偏航率是小于转矩控制和驱动转矩的,这样有利于实现控制和稳定运行,因为总驱动转矩较低,车辆的加速度小,如果不中断,转向角有效加速度是减小的。驱动转矩是缓慢收敛的。同样的,作者在实验中得出的结论同仿真实验的结果相一致。
在论文的最后,作者提出了驱动转矩控制方法为电动汽车内轮马达,因为通过仿真和实验证明了其有效性,结果证实,通过直接控制驱动转矩的驱动转矩观测器,不管路况怎样,驾驶的稳定性是可以实现的。
同时作者也提出了对于未来的希冀,包括努力实现更快的驱动转矩控制盒控制车辆的加速的。
Electrical Engineering in Japan, Vol. 181, No. 3, 2012
Translated from Denki Gakkai Ronbunshi, Vol. 131-D, No. 5, May 2011, pp. 721–728