传感器与检测技术(胡向东,第2版)习题解答
王涛
第1章概述
1.1 什么是传感器?
答:传感器是能够感受规定的被测量并按照一定规律转换成可用输出信号的器件和装置,通常由敏感元件和转换元件组成。
1.2 传感器的共性是什么?
答:传感器的共性就是利用物理定律或物质的物理、化学或生物特性,将非电量(如位移、速度、加速度、力等)输入转换成电量(电压、电流、频率、电荷、电容、电阻等)输出。
1.3 传感器一般由哪几部分组成?
答:传感器的基本组成分为敏感元件和转换元件两部分,分别完成检测和转换两个基本功能。另外还需要信号调理与转换电路,辅助电源。
1.4 传感器是如何分类的?
答:传感器可按输入量、输出量、工作原理、基本效应、能量变换关系以及所蕴含的技术特征等分类,其中按输入量和工作原理的分类方式应用较为普遍。
①按传感器的输入量(即被测参数)进行分类
按输入量分类的传感器以被测物理量命名,如位移传感器、速度传感器、温度传感器、湿度传感器、压力传感器等。
②按传感器的工作原理进行分类
根据传感器的工作原理(物理定律、物理效应、半导体理论、化学原理等),可以分为电阻式传感器、电感式传感器、电容式传感器、压电式传感器、磁敏式传感器、热电式传感器、光电式传感器等。
③按传感器的基本效应进行分类
根据传感器敏感元件所蕴含的基本效应,可以将传感器分为物理传感器、化学传感器和生物传感器。
1.6 改善传感器性能的技术途径有哪些?
答:①差动技术;②平均技术;③补偿与修正技术;④屏蔽、隔离与干扰抑制;⑤稳定性处理。
第2章传感器的基本特性
2.1 什么是传感器的静态特性?描述传感器静态特性的主要指标有哪些?
答:传感器的静态特性是它在稳态信号作用下的输入、输出关系。静态特性所描述的传感器的输入-输出关系中不含时间变量。
衡量传感器静态特性的主要指标是线性度、灵敏度、分辨率、迟滞、重复性和漂移。
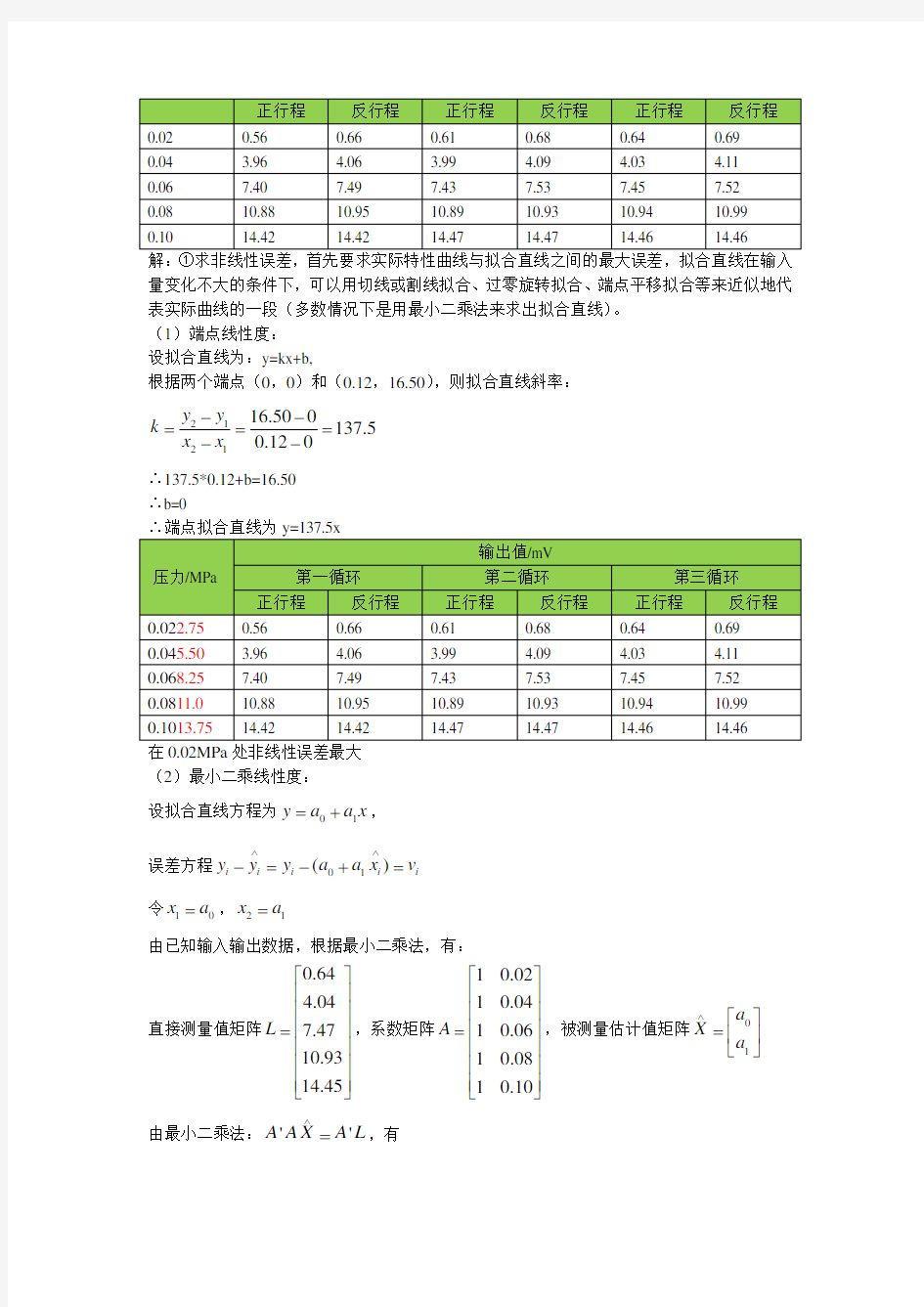
2.3 利用压力传感器所得测试数据如下表所示,计算非线性误差、迟滞和重复性误差。设压
解:①求非线性误差,首先要求实际特性曲线与拟合直线之间的最大误差,拟合直线在输入量变化不大的条件下,可以用切线或割线拟合、过零旋转拟合、端点平移拟合等来近似地代表实际曲线的一段(多数情况下是用最小二乘法来求出拟合直线)。 (1)端点线性度: 设拟合直线为:y=kx+b,
根据两个端点(0,0)和(0.12,16.50),则拟合直线斜率:
212116.500
137.50.120
y y k x x --=
==--
∴137.5*0.12+b=16.50 ∴b=0
∴端点拟合直线为y=137.5x
在0.02MPa 处非线性误差最大 (2)最小二乘线性度:
设拟合直线方程为01y a a x =+, 误差方程01()i i i i i y y y a a x v ∧
∧
-=-+= 令10x a =,21x a =
由已知输入输出数据,根据最小二乘法,有:
直接测量值矩阵0.644.047.4710.9314.45L ????????=????????
,系数矩阵10.0210.041
0.061
0.0810.10A ??
???
???=????????
,被测量估计值矩阵01a X a ∧??=????
由最小二乘法:''A A X A L ∧
=,有
10.021
0.041
111150.30'10.060.020.040.060.080.100.300.02210.081
0.10A A ??
??????????==??
??
?
???????????
0.644.041
111137.53'7.470.020.040.060.080.10 2.94210.9314.45A L ????
????????==????
?
???????????
'0.020A A =≠ ()1
111221220.0220.30 1.1151
1'0.30515250'0.02A A A A A A A A
---??????
∴===??????--????
?? []
1
1.11537.53
2.847''15250 2.942172.55X A A A L ∧
---??????
∴===??????-??????
01 2.847a x ∴==- 12172.55a x ∴==
∴拟合直线为y=-2.847+172.55x
答:非线性误差公式:max 0.106
100%100%0.64%16.50
L FS L Y γ?=±
?=?= ② 迟滞误差公式:max
100%H FS
H Y γ?=
?, 又∵最大行程最大偏差max H ?=0.1mV ,∴max 0.1
100%100%0.6%16.50
H FS H Y γ?=
?=?=
③ 重复性误差公式:max
100%L FS
R Y γ?=±
?, 又∵重复性最大偏差为max R ?=0.08,∴m a x 0.08
100%100%0.48%16.50
L FS R Y γ?=±
?=±?=±
2.7 用一阶传感器测量100Hz 的正弦信号,如果要求幅值误差限制在±5%以内,时间常数
应取多少?如果用该传感器测量50Hz 的正弦信号,其幅值误差和相位误差各为多少? 解:一阶传感器频率响应特性:1
()()1
H j j ωτω=
+
幅频特性:()A ω=
由题意有()15%A ω-≤
15%-≤
又22200f T
π
ωππ=
== 所以:0<τ<0.523ms
取τ=0.523ms ,ω=2πf=2π×50=100π
幅值误差:()100% 1.32%A ω?=
=-
所以有-1.32%≤△A(ω)<0
相位误差:△φ(ω)=-arctan(ωτ)=-9.3o 所以有-9.3o≤△φ(ω)<0
2.8 某温度传感器为时间常数τ=3s 的一阶系统,当传感器受突变温度作用后,试求传感器指示出温差的三分之一和二分之一所需的时间。 解:一阶传感器的单位阶跃响应函数为
()1t
y t e τ
-
=-
∴ln[1()]t
y t τ
-
=-
∴*ln[1()]t y t τ=--
∴13
12*ln[1]*ln[]3*(0.405465) 1.216433
t s ττ=--=-=--=,
12
11
*ln[1]*ln[]3*(0.693) 2.0822t s ττ=--=-=--=
2.9 玻璃水银温度计通过玻璃温包将热量传给水银,可用一阶微分方程来表示。现已知某玻
璃水银温度计特性的微分方程是
2
dy
y x dt
+= y 代表水银柱高(mm ), x 代表输入温度(℃)。求该温度计的时间常数及灵敏度。 解:一阶传感器的微分方程为
()
()()n dy t y t S x t dt
τ
+= 式中τ——传感器的时间常数;
n S ——传感器的灵敏度。
∴对照玻璃水银温度计特性的微分方程和一阶传感器特性的通用微分方程,有该温度计的时间常数为2s ,灵敏度为1。
2.10 某传感器为一阶系统,当受阶跃函数作用时,在t=0时,输出为10mv ;在t=5s 时输出为50mv ;在t →∞时,输出为100mv 。试求该传感器的时间常数。 解:00()()[()()](1)t
y t y t y t y t e τ-∞-=--, ∴00()()5010
ln[1]ln[1]0.587787()()10010
y t y t t
y t y t τ
∞---
=-
=-=---,
∴τ=5/0.587787=8.5s
2.11 某一质量-弹簧-阻尼系统在受到阶跃输入激励下,出现的超调量大约是最终稳态值的40%。如果从阶跃输入开始至超调量出现所需的时间为0.8s ,试估算阻尼比和固有角频率的大小。
解:1
0.283.5714568
ζ=
=
==,
22 3.4270.82
d T ππω=
==?,
4.26/n rad s ω=
=
=
2.12 在某二阶传感器的频率特性测试中发现,谐振发生在频率216Hz 处,并得到最大的幅值比为1.4,试估算该传感器的阻尼比和固有角频率的大小。 解:当n ωω=时共振,则max 1 1.4(),0.3621
A ωζζ=
== 所以:222161357/n f rad s ωππ==?=
2.13 设一力传感器可简化为典型的质量-弹簧-阻尼二阶系统,已知该传感器的固有频率
0f =1000Hz ,若其阻尼比为0.7,试问用它测量频率为600Hz 、400Hz 的正弦交变力时,其
输出与输入幅值比A(ω)和相位差φ(ω)各为多少?
解:二阶传感器的频率响应特性:2
1
()[1(/)]2(/)
n n H j ωωωζωω=
-+ 幅频特性:1222
22
(){[1(/)]4(/)}n n A j ωωωζωω-=-+ 相频特性:2
2(/)
()arctan 1(/)
n n ζωω?ωωω=-- ∴当f=600Hz 时,
12222
2
(){[1(600/1000)]40.7(600/1000)}0.947A j ω-
=-+??=,
220.7(600/1000)0.84
()arctan
arctan 52.6961(600/1000)0.64
?ω??=-=-=?-;
当f=400Hz 时,
1
2222
2
(){[1(400/1000)]40.7(400/1000)}
0.99A j ω-
=-+??=
220.7(400/1000)0.56
()arctan
arctan 33.691(400/1000)0.84
?ω??=-=-=?-。
第3章 电阻式传感器
3.2 电阻应变片的种类有哪些?各有什么特点?
答:常用的电阻应变片有两种:金属电阻应变片和半导体电阻应变片。金属电阻应变片的工作原理是主要基于应变效应导致其材料几何尺寸的变化;半导体电阻应变片的工作原理是主要基于半导体材料的压阻效应。
3.4 试分析差动测量电路在应变电阻式传感器测量中的好处。
答:① 单臂电桥测量电路存在非线性误差,而半桥差动和全桥差动电路均无非线性误差。 ② 半桥差动电路的电压输出灵敏度比单臂电桥提高了一倍。全桥差动电路的电压输出灵敏度是单臂电桥的4倍。
3.5 将100Ω电阻应变片贴在弹性试件上,如果试件截面积4
2
0.510S m -=?,弹性模量
112210/E N m =?,若由4510N ?的拉力引起应变计电阻变化为1Ω,求电阻应变片的灵
敏度系数。 解:/R R
K ε
?=
已知1
1,100
R R R ??=Ω∴
= 3292
4
5010/110/0.510F N m N m A σ-?===?? 由E σε=得9
311
110510210
E σ
ε-?===??
所以3
/1/100
2510R R
K ε
-?=
=
=?
3.6 一个量程为10kN 的应变式测力传感器,其弹性元件为薄壁圆筒轴向受力,外径20mm ,内径18mm,在其表面粘贴八各应变片,四个沿周向粘贴,应变片的电阻值均为120Ω,灵敏度为2.0,波松比为0.3,材料弹性模量E=2.1×1011Pa 。要求: (1) 绘出弹性元件贴片位置及全桥电路;
(2) 计算传感器在满量程时,各应变片电阻变化;
(3) 当桥路的供电电压为10V 时,计算传感器的输出电压。 解:(1)
(2) 圆桶截面积:
2222662()(109)1059.6910A R r m ππ--=-=-?=?
应变片1、2、3、4感受纵向应变;
1234x εεεεε====
应变片5、6、7、8感受周向应变;
5678y εεεεε====
满量程时:
由电阻应变片灵敏度公式/R R
K ε
?=
得R K R ε?=,
由应力与应变的关系E σε=,及 应力与受力面积的关系F
A
σ=
,得 F
AE
ε=
, 3
1234611
10102.01200.1914359.710 2.110F R R R R K R AE -??=?=?=?==??=Ω???
567810.30.191430.05743R R R R R μ?=?=?=?=-?=-?=-Ω
(3) 3
611
101010(1)
2.0(10.3)0.010372259.710 2.110U F U K V AE μ-??=+=??+?=???
3.7 图3-5中,设负载电阻为无穷大(开路),图中4E V =,1234100R R R R ====Ω, 试求:
(1) 1R 为金属电阻应变片,其余为外接电阻,当1R 的增量为1 1.0R ?=Ω时,电桥的输出电压?o U =
(2) 1R , 2R 都是电阻应变片,且批号相同,感应应变的极性和大小都相同,其余为外接电阻,电桥的输出电压?o U =
(3) 1R , 2R 都是电阻应变片,且批号相同,感应应变的大小为12 1.0R R ?=?=Ω,但极性相反,其余为外接电阻,电桥的输出电压?o U =
解:(1) 单臂311112341011
[
]4()0.00995()1011002o R R R U E V R R R R R +?=-=?-≈+?+++
(2) 极性相同3111122341011
[
]4()0()()1011012
o R R R U E V R R R R R R +?=-=?-=+?++?++
(3)半桥3111122341011
[]4()0.02()()101992
o R R R U E V R R R R R R +?=-=?-=+?+-?++
3.8 在图3-11中,设电阻应变片1R 的灵敏度系数K=2.05,未受应变时,1R =120Ω。当试件受力F 时,电阻应变片承受平均应变值800/m m εμ=。试求: (1) 电阻应变片的电阻变化量1R ?和电阻相对变化量11/R R ?;
(2) 将电阻应变片1R 置于单臂测量电桥,电桥电源电压为直流3V ,求电桥输出电压及其非线性误差;
(3) 如果要减小非线性误差,应采取何种措施?分析其电桥输出电压及非线性误差的大小。
解:图3-11是一种等强度梁式力传感器, (1) 由K= (ΔR/R)/ε得ΔR/R=K ε,
6311/ 2.0580010 1.6410R R K ε--?==??=?, 31111(/)120 1.64100.1968R R R R -?=??=??=Ω
(2) 31111234120.19681[
]3()0.00123()120.19681202
o R R R U E V R R R R R +?=-=?-≈+?+++
1111/0.00164
100%100%0.082%2/20.00164
L R R R R γ?=
?=?≈+?+
3.9 电阻应变片阻值为120Ω,灵敏系数K=2,沿纵向粘贴于直径为0.05m 的圆形钢柱表面,钢材的弹性模量11
2
210/E N m =?,泊松比μ=0.3。求:
(1) 钢柱受4
9.810N ?拉力作用时应变片电阻的变化量R ?和相对变化量
R
R
?; (2) 若应变片沿钢柱圆周方向粘贴,受同样拉力作用时应变片电阻的相对变化量。 解:(1) 由应力与应变的关系E σε=,及 应力与受力面积的关系F A σ=
,得F AE
ε=,
4
3211
9.8100.25100.05()2102F AE επ-?==≈????,
3320.25100.510R
K R
ε--?==??=?, 31200.5100.06R
R R R
-??=?=??=Ω;
(2) 由y x εμε=-
,得330.30.5100.1510y x y x
R R R R μ--??=-?=-??=-?。
第4章 电感式传感器
4.3 已知变气隙厚度电感式传感器的铁芯截面积2
1.5S cm =,磁路长度L =20cm , 相对磁导率5000r μ=,气隙初始厚度00.5cm δ=, δ?=±0.1mm ,真空磁导率
70410/H m μπ-=?,线圈匝数N =3000,求单线圈式传感器的灵敏度/L δ??。若将其
做成差动结构,灵敏度将如何变化? 解:0
L L δ
δ??=, 0
L L K δδ?=
=
? 2274
30002
03000410 1.5105410,220.510
N A L H H μππδ----????===??? 所以,3
2
541010.8340.510K ππ--?=
==?。 做成差动结构形式,灵敏度将提高一倍。
4.5 有一只差动电感位移传感器,已知电源电压4U V =,400f Hz =,传感器线圈电阻与电感分别为R=40Ω,L=30mH ,用两只匹配电阻设计成四臂等阻抗电桥,如图所示,试求: (1)匹配电阻3R 和4R 的值为多少时才能使电压灵敏度达到最大。 (2)当△Z=10Ω时,分别接成单臂和差动电桥后的输出电压值。
解:(1) R3=R4=R=40Ω (2) 2211212
2()o Z Z Z R U U U Z Z R R Z Z ?
?
-=-=??
+++?? 单臂电桥
221212121210
40.252()2()2(4040)o Z Z Z Z R U U U U V Z Z R R Z Z Z Z ??-?=-==-=-?=-??
++++?+??
差动电桥几何
22112121212
20
40.52()2()2(4040)o Z Z Z Z Z R U U U U V Z Z R R Z Z Z Z ??-?+?=-==-=-?=-??
++++?+??4.9 引起零点残余电压的原因是什么?如何消除零点残余电压?
答:零点残余电压的产生原因:①(线圈)传感器的两个二次绕组的电气参数和几何尺寸不对称,导致它们产生的感生电动势幅值不等、相位不同,构成了零点残余电压的基波;②(铁心)由于磁性材料磁化曲线的非线性(磁饱和、磁滞),产生了零点残余电压的高次谐波(主要是三次谐波);③(电源)励磁电压本身含高次谐波。
零点残余电压的消除方法:①尽可能保证传感器的几何尺寸、线圈电气参数和磁路的对称;②采用适当的测量电路,如差动整流电路。
4.10 在使用螺线管电感式传感器时,如何根据输出电压来判断衔铁的位置?
答:常见的差动整流电路如图4-15所示。以图4-15b 为例分析差动整流的工作原理。由图可知:无论两个二次绕组的输出瞬时电压极性如何,流经电容1C 的电流方向总是从2端到4端,流经电容2C 的电流方向总是从6端到8端,所以整流电路的输出电压为
2468o U U U =-
当衔铁位于中间位置时,2468U U =,故输出电压o U =0;当衔铁位于零位以上时,2468U U >,则0o U >;当衔铁位于零位以下时,则有2468U U <,0o U <。只能根据o U 的符号判断衔铁的位置在零位处、零位以上或以下,但不能判断运动的方向。 4.11 如何通过相敏检波电路实现对位移大小和方向的判定? 答:相敏检测电路原理是通过鉴别相位来辨别位移的方向,即差分变压器输出的调幅波经相敏检波后,便能输出既反映位移大小,又反映位移极性的测量信号。经过相敏检波电路,正位移输出正电压,负位移输出负电压,电压值的大小表明位移的大小,电压的正负表明位移
的方向。
第5章 电容式传感器
5.2 有一个以空气为介质的变面积型平板电容传感器如下图所示,其中a=10mm ,b=16mm ,两极板间距为01d mm =。测量时,一块极板在原始位置上向左平移了2mm ,求该传感器的电容变化量、电容相对变化量和位移灵敏度K (已知空气相对介电常数1ε=,真空的介电常数1208.85410/F m ε-=?)。
解:电容变化量为
0000-12-3-3
-13-3
..()......8.8541012101610 2.8310110
r r r a x b a b
xb
C C C d d d
F εεεεεε-???=-=
-
=-
??????=-=-?? 即电容减小了-13
2.8310
F -?。
电容相对变化量
00...0.2r r x b
C x d C a d
εεεε???===,
电容式传感器的位移灵敏度(单位距离改变引起的电容量相对变化)为
1
3
/11100()1010
C C x a K m x x a --??=
====???, 或
电容式传感器的位移灵敏度(单位距离改变引起的电容量变化)为
-101.4110(/)C C
K F m x a
?=
==?? 5.4 有一个直径为2m 、高5m 的铁桶,往桶内连续注水,当注水量达到桶容量的80%时就应当停止,试分析用应变电阻式传感器或电容式传感器来解决该问题的途径和方法。 解:① 电阻应变片式传感器解决此问题的方法参见P48图3-18所示的电阻式液体重量传感器,
o U Sh g ρ=,
当注水达到桶容量的80%时,也就是位于感压膜上的液体高度达到桶高4m 的对应位置时,输出一个对应的电压,通过一个电压比较器就可以在液位达到4m 时输出一个触发信号,关
闭阀门,停止注水。
② 电容式传感器解决此问题的方法参见P80图5-6所示的圆筒结构变介质型电容式传感器,总的电容值为
001001011202()222(1)2(1)
ln(/)ln(/)ln(/)ln(/)ln(/)
H h h H h h C C C C D d D d D d D d D d πεπεεπεπεεπεε---=+=
+=+=+
在圆筒结构变介质式电容传感器中的液位达到桶高4m 的对应位置时,电容值达到一个特定
值,接入测量电路,就可以在液位达到4m 时输出一个触发信号,关闭阀门,停止注水。 5.6 试推导图5-20所示变介质型电容式位移传感器的特性方程C=f(x)。设真空的介电常数为0ε,图中21εε>,极板宽度为W 。其它参数如图所示。
解:以x 为界,可以看作两个电容器并联,右边的电容器又可以看作两个电容器串联。参见P79图5-5。故
011lx C εεδ=
,0121()()l l x C d εεδ-=-,0222()l l x C d εε-=,2122122212212()
()
C C l l x C C C d d εεεεδ-==++-, 总的电容量为
0112
1212()
()
lx l l x C C C d d εεεεδεεδ-=+=
++-。 5.7 在题5.6中,设δ=d=1mm ,极板为正方形(边长50mm )。1ε=1,2ε=4。试针对x=0~50mm 范围内,绘出此位移传感器的特性曲线,并给以适当说明。
解:2010202012120()()lx l l x l lx
C C C C C εεεεεεεεεδδδδ
--=+=+=+=+? 特性曲线是一条斜率为-1的直线。
5.8某一电容测微仪,其传感器的圆形极板半径 r=4mm ,工作初始间隙d=0.3mm ,问: (1) 工作时,如果传感器与工件的间隙变化量Δd=2μm 时,电容变化量为多少? (2) 如果测量电路的灵敏度S 1=100mV/pF ,读数仪表的灵敏度S 2=5格/mV ,在Δd=2μm 时,读数仪表的示值变化多少格? 解: (1)-12-32-1200-3
8.85410 3.1415926(410) 1.4835100.310
r A
C F d εε????=
==??, 间隙增大-12-32
-121-3
8.85410 3.1415926(410) 1.473510(0.30.002)10
A
C F d d ε????===?+?+?, -12-12110-(1.4735-1.4835)10-0.0110C C C F ?==?=?,
间隙缩小-12-32
-122-3
8.85410 3.1415926(410) 1.493310-(0.3-0.002)10
A
C F d d ε????===???,-12-12220-(1.4933-1.4735)100.0097910C C C F ?==?=?,
0.01C pF ?≈
(2)121,U S 5U C S mV ?=??==??=格数变化格
第6章 压电式传感器
6.1 什么是压电效应?什么是逆压电效应?
答:① 正压电效应就是对某些电介质沿一定方向施以外力使其变形时,其内部将产生极化现象而使其出现电荷集聚的现象。
② 当在片状压电材料的两个电极面上加上交流电压,那么压电片将产生机械振动,即压电片在电极方向上产生伸缩变形,压电材料的这种现象称为电致伸缩效应,也称为逆压电效应。 6.3 试分析石英晶体的压电效应原理。
答:石英晶体的化学成分是2SiO ,是单晶结构,理想形状六角锥体,如图6-1a 所示。石英晶体是各向异性材料,不同晶向具有各异的物理特性,用x 、y 、z 轴来描述。
z 轴:是通过锥顶端的轴线,是纵向轴,称为光轴,沿该方向受力不会产生压电效应。 x 轴:经过六面体的棱线并垂直于z 轴的轴为x 轴,称为电轴(压电效应只在该轴的两个表面产生电荷集聚),沿该方向受力产生的压电效应称为“纵向压电效应”。
y 轴:与x 、z 轴同时垂直的轴为y 轴,称为机械轴(该方向只产生机械变形,不会出现电荷集聚)。沿该方向受力产生的压电效应称为“横向压电效应”。 石英晶体在沿一定的方向受到外力的作用变形时,由于内部电极化现象同时在两个表面上产生符号相反的电荷,当外力去掉后,恢复到不带电的状态;而当作用力方向改变时,电荷的极性随着改变。晶体受力所产生的电荷量与外力的大小成正比。这种现象称为正压电效应。反之,如对石英晶体施加一定变电场,晶体本身将产生机械变形,外电场撤离,变形也随之消失,称为逆压电效应。
6.12 将一压电式力传感器与一只灵敏度V S 可调的电荷放大器连接,然后接到灵敏度为
X S =20mm/V 的光线示波器上记录,已知压电式压力传感器的灵敏度为P S =5pc/Pa ,该测试
系统的总灵敏度为S=0.5mm/Pa ,试问: (1) 电荷放大器的灵敏度V S 应调为何值(V/pc)?
(2) 用该测试系统测40Pa 的压力变化时,光线示波器上光点的移动距离是多少? 解:(1) P V X S S S S =
0.5/0.005/5/20/V P X S mm Pa
S V pc S S pc Pa mm V
=
==? (2) 400.5/4020x S Pa mm Pa Pa mm =?=?=
第7章 磁敏式传感器
7.5 什么是霍尔效应?霍尔电动势与哪些因素有关?
答:① 一块长为l 、宽为d 的半导体薄片置于磁感应强度为B 的磁场(磁场方向垂直于薄片)中,当有电流I 流过时,在垂直于电流和磁场的方向上将产生电动势Uh 。这种现象称为霍尔效应。霍尔组件多用N 型半导体材料,且比较薄。
② 霍尔电势 H H H H IB IB
U E b vBb R K IB ned d
===-
== 霍尔电势与霍尔电场E H 、载流导体或半导体的宽度b 、载流导体或半导体的厚度d 、电子平
均运动速度v 、磁场感应强度B 、电流I 有关。 ③ 霍尔传感器的灵敏度1
H H R K d ned
=
=- 。 为了提高霍尔传感器的灵敏度,霍尔元件常制成薄片形状。又霍尔元件的灵敏度与载流子浓
度成反比,所以可采用自由电子浓度较低的材料作霍尔元件。
7.6 某霍尔元件尺寸(l 、b 、d )为1.0cm ×0.35cm ×0.1cm ,沿l 方向通以电流I=1.0mA ,在垂直l b 面加有均匀磁场B=0.3T ,传感器的灵敏度系数为22V/A.T ,求其输出的霍尔电动势和载流子浓度。
解:① 322 1.0100.30.0066H H U K IB V -==???= ② 由1
H K ned
=
,得 203
192
11 2.8410/22 1.6100.110
H n m K ed ---=
==?????
第8章 热电式传感器
8.2 热电偶的工作原理是什么?
答:热电偶测温基本原理:热电偶测温是基于热电效应的基本原理。根据热电效应,任何两种不同的导体或半导体组成的闭合回路,如果将它们的两个接点分别置于温度不同的热源中,则在该回路中会产生热电动势,在一定条件下,产生的热电动势与被测温度成单值函数关系。因此,我们只需测得热电动势值,就可间接获得被测温度。
8.3 什么是中间导体定律、中间温度定律、标准导体定律、均质导体定律? 答:① 中间导体定律
热电偶测温时,若在回路中插入中间导体,只要中间导体两端的温度相同,则对热电偶回路总的热电势不产生影响。在用热电偶测温时,连接导线及显示仪表等均可看成中间导体。 ② 中间温度定律
任何两种均匀材料组成的热电偶,热端为t ,冷端为0t 时的热电势等于该热电偶热端为t 冷端为c t 时的热电势与同一热电偶热端为c t ,冷端为0t 时热电势的代数和。
应用:对热电偶冷端不为0℃时,可用中间温度定律加以修正。 热电偶的长度不够时,可根据中间温度定律选用适当的补偿线路。 ③ 标准电极定律
如果A 、B 两种导体(热电极)分别与第三种导体C (参考电极)组成的热电偶所产生的热电动势已知,则由这两个导体A 、B 组成的热电偶产生的热电势为
()()()000,,,AB AC BC E t t E t t E t t =-
实用价值:可大大简化热电偶的选配工作。在实际工作中,只要获得有关热电极与标准铂电极配对的热电势,那么由这两种热电极配对组成热电偶的热电势便可由上式求得,而不需逐个进行测定。 ④ 均质导体定律
如果组成热电偶的两个热电极的材料相同,无论两接点的温度是否相同,热电偶回路中的总热电动势均为0。
均质导体定律有助于检验两个热电极材料成分是否相同及热电极材料的均匀性。 8.7 用两只K 型热电偶测量两点温度,其连接线路如下图所示,已知1t =420℃,0t =30℃,测得两点的温差电动势为15.24mv ,问两点的温度差是多少?如果测量1t 温度的那只热电偶错用的是E 型热电偶,其他都正确,试求两点实际温度差是多少?
(可能用到的热电偶分度表数据见表一和表二,最后结果可只保留到整数位)
表一 K 型热电偶分度表(部分)
解:①
121020222(,)(,)(,)(420,30)(,30)[(420,0)(30,0)][(,0)(30,0)](420,0)(,0),
e t t e t t e t t e e t e e e t e e e t =-=-=---=-
所以212(,0)(420,0)(,)17.2415.24 2.0e t e e t t mv =-=-=,
查表得2t 点的温度为49.5℃,两点间的温度差为12t t -=420-49.5=370.5℃。
② 如果测量2t 错用了E 型热电偶,则
121020222(,)(,)(,)(420,30)(,30)[(420,0)(30,0)][(,0)(30,0)][30.546 1.801][(,0) 1.203],
E K E K E E K K K e t t e t t e t t e e t e e e t e e t =-=-=---=---
所以2(,0)30.546 1.801 1.20315.2414.708K e t mv =-+-=
查表得2t 点的温度为360℃,两点间的温度差实际为12t t -=420-360=60℃。
8.8 将一支镍铬-镍硅热电偶与电压表相连,电压表接线端是50℃,若电位计上读数是6.0mV ,问热电偶热端温度是多少?
解:① 查表,知K 型热电偶50℃对应的电动势为2.022mV , ② 依据中间温度定律
00(,)(,)(,)AB AB c c E t t E t t E t t =+
得
()6 2.0228.022e t mV =+=
③ 按内插值计算
()M L
M L H L H L
E E t t t t E E -=+
--
得热端温度为t =8.0227.737
190(200190)8.1377.737
-+
--=197.125℃
8.9 铂电阻温度计在100℃时的电阻值为139Ω,当它与热的气体接触时,电阻值增至281Ω,试确定该气体的温度(设0℃时电阻值为100Ω)。 解:由0℃时电阻值为100Ω,可知该铂电阻温度计为分度号为100Pt 的铂热电阻,根据100℃时的电阻值为139Ω,进一步确定为分度号为100Pt 的铂热电阻。对应于281Ω的阻值,查100Pt 分度表,对应的温度约为500℃。
8.10 镍铬-镍硅热电偶的灵敏度为0.04mV/℃,把它放在温度为1200℃处,若以指示表作为冷端,此处温度为50℃,试求热电动势的大小。
解:3120050(,)(120050)0.041011500.046e t t K V -=?-=??=
8.11 将一灵敏度为0.08mV/℃的热电偶与电压表相连接,电压表接线端是50℃,若电位计上读数是60mV ,求热电偶的热端温度。 解:50(,)60
50500.08
e t t t K =
+=+=800℃ 8.12 使用K 型热电偶,参考端温度为0℃,测量热端温度为30℃和900℃时,温差电动势
分别为1.203mV 和37.326mV 。当参考端温度为30℃、测量点温度为900℃时的温差电动势为多少?
解:根据中间温度定律
00(,)(,)(,)AB AB c c E t t E t t E t t =+,
有
9003090000309000300(,)(,)(,)(,)(,)AB AB AB AB AB E t t E t t E t t E t t E t t =+=-=37.326-1.203=36.123
mV
8.14 热电阻有什么特点?
答:热电阻测温基本原理:热电阻测温是基于热效应的基本原理。所谓热效应,就是金属导体的阻值会随温度的升高而增加或减小的现象。因此,我们只需测得金属导体电阻的变化就可间接获得被测温度。
8.15 试分析三线制和四线制接法在热电阻测量中的原理及其不同特点。 答:热电阻常用引线方式主要有:两线制、三线制和四线制。
两线制的特点是结构简单、费用低,但是引线电阻及其变化会带来附加误差。主要适用于引线不长、测温精度要求较低的场合。
三线制的特点是可较好地减小引线电阻的影响。主要适用于大多数工业测量场合。 四线制的特点是精度高,能完全消除引线电阻对测量的影响。主要适用于实验室等高精度测量场合。
8.17 某热敏电阻,其B 值为2900K ,若冰点电阻为500k Ω,求该热敏电阻在100℃时的阻抗。
解:具有负温度系数的热敏电阻,其阻值与温度的关系可表示为
00
exp(
)RT B B
R R t t =--2.8452,7.7717,10.6169 31000029002900
exp()50010exp()373.15273.15
B B R R t t =-=??-
=3
3
50010exp( 2.8452)500100.05812??-=??=29k Ω
第9章 光电式传感器
9.4 什么是光电效应、内光电效应、外光电效应?这些光电效应的典型光电器件各自有哪些?
答:光照射到物体上使物体发射电子,或电导率发生变化,或产生光生电动势等,这些因光照引起物体电学特性改变的现象称为光电效应。 当光照射到金属或金属氧化物的光电材料上时,光子的能量传给光电材料表面的电子,如果入射到表面的光能使电子获得足够的能量,电子会克服正离子对它的吸引力,脱离材料表面进入外界空间,这种现象称为外光电效应。根据外光电效应制作的光电器件有光电管和光电倍增管。
内光电效应是指物体受到光照后所产生的光电子只在物体内部运动,而不会逸出物体的现象。内光电效应多发生在半导体内,可分为因光照引起半导体电阻率变化的光电导效应和因光照产生电动势的光生伏特效应两种。
光电导效应是指物体在入射光能量的激发下,其内部产生光生载流子(电子-空穴对),使物体中载流子数量显著增加而电阻减小的现象。基于光电导效应的光电器件有光敏电阻。 光生伏特效应是指光照在半导体中激发出的光电子和空穴在空间分开而产生电位差的现象,
是将光能变为电能的一种效应。基于光生伏特效应的光电器件典型的有光电池;此外,光敏二极管、光敏晶体管也是基于光生伏特效应的光电器件。
9.22 一个8位光电码盘的最小分辨率是多少?如果要求每个最小分辨率对应的码盘圆弧长度至少为0.01mm ,则码盘半径应有多大?
解:一个n 位二进制码盘的最小分辨率是360/2n
?。∴8位光电码盘的最小分辨率是
8360/2?≈1.4°。
码盘周长为8
0.012mm ?=0.01mm*256=2.56mm ,码盘半径为2.56mm/2π≈0.4074mm 9.23 设某循环码盘的初始位置为“0000”,利用该循环码盘测得结果为“0110”,其实际转过的角度是多少?
解:基于二进制码得到循环码的转换关系为
1(1,,1)n n
i i i C B C B B i n +=??=⊕=-?, 相应地,循环码转换为二进制码的方法为
1(1,
,1)n n
i i i B C B C B i n +=??=⊕=-?
。
∴循环码“0110”对应的二进制码为“0100”,对应的十进制数为4,又∵初始位置为“0000”,对应的二进制码为“0000”,对应的十进制数为0, ∴实际转过的角度10
4
40
36036090216
θθθ--=
??=
??=? 9.27 已知某计量光栅的栅线密度为100线/mm ,栅线夹角θ=0.1o。求: (1) 该光栅形成的莫尔条纹间距是多少?
(2) 若采用该光栅测量线位移,已知指示光栅上的莫尔条纹移动了15条,则被测位移为多少?
(3) 若采用四只光敏二极管接收莫尔条纹信号,并且光敏二极管响应时间为10-6 s ,问此时光栅允许最快的运动速度v 是多少?
解:(1) 由光栅密度为100线/mm ,可知其光栅栅距1
0.01100
W mm mm == 根据公式可求莫尔条纹间距H W
B θ
=
式中θ为主光栅与指示光栅夹角。 θ=0.1o=0.001745rad
0.01
5.730.001745
H W
B mm mm θ
=
=
=
(2) 计量光栅对位移起放大作用,光栅每移动一个栅距,莫尔条纹移动一个间距B H 。 指示光栅上莫尔条纹移动了15条,对应的光栅也就移动了15个栅距, 即被测线位移为△x=15×0.01mm=0.15mm
(3) 光栅运动速度与光敏二极管的响应时间成反比,即
60.01
/10/10
W v mm s m s t -=
== 所以最大允许速度为10m/s
第10章 辐射与波式传感器
10.8 试分析微波传感器的主要组成及其各自的功能。
答:微波传感器的组成主要包括三个部分:微波发生器(或称微波振荡器)、微波天线及微波检测器。
(1)微波发生器
微波发生器是产生微波的装置。由于微波波长很短、频率很高(300MHz~300GHz ),要求振荡回路有非常小的电感与电容,故不能采用普通的晶体管构成微波振荡器,而是采用速调管、磁控管或某些固态元件构成。小型微波振荡器也可采用体效应管。
微波发生器产生的振荡信号需要用波导管(管长为10cm 以上,可用同轴电缆)传输。 (2)微波天线
微波天线是用于将经振荡器产生的微波信号发射出去的装置。为了保证发射出去的微波信号具有最大的能量输出和一致的方向性,要求微波天线有特殊的结构和形状,常用的天线如图10-17所示,包括喇叭形、抛物面形等。前者在波导管与敞开的空间之间起匹配作用,有利于获得最大能量输出;后者类似凹面镜产生平行光,有利于改善微波发射的方向性。 (3)微波检测器
微波检测器是用于探测微波信号的装置。微波在传播过程中表现为空间电场的微小变化,因此使用电流-电压呈非线性特性的电子元件,根据工作频率的不同,有多种电子元件可供选择(如较低频率下的半导体PN 结元件、较高频率下的隧道结元件等),但都要求它们在工作频率范围内有足够快的响应速度。
10.13 在用脉冲回波法测量厚度时,利用何种方法测量时间间隔t ?有利于自动测量?若已知超声波在被测试件中的传播速度为5480m/s ,测得时间间隔为25s μ,试求被测试件的厚度。
解:用稳频晶振产生的时间标准信号来测量时间间隔t ?的计数脉冲个数,有利于自动测量。用插值法对两个脉冲之间的时间进行扩展再计数,有利于提高测量精度。
被测试件的厚度6
5480251022
v t d -???===0.0685m
J I A N G S U U N I V E R S I T Y 聚酰胺6的聚合工艺 学院:京江学院 班级:J高分子1101 姓名:杨嘉城 学号:4111126036
一.聚酰胺6的简介: (3) 二.聚酰胺6的的发展前景 (3) 三.聚酰胺6的原料及配方 (3) 3.1原料 (3) 3.2配方 (4) 四.聚酰胺6聚合过程与工艺 (4) 4.1PA6聚合方法 (4) 4.1.1常压连续聚合法 (5) 4.1.2二段聚合法 (5) 4.1.3间歇式高压釜聚合法 (6) 4.1.4固相后缩聚法 (6) 4.1.5多段连续聚合法 (8) 4.1.6水解聚合工艺 (9) 五..聚合聚酰胺6的设备 (11) 5.1反应机理 (11) 5.2工艺流程 (12) 5.3聚酰胺反应挤出 (13) 5.4反应挤出机理 (13) 六.挤出成型的影响因素 (14) 6.1原料质量 (14) 6.2温度控制 (14) 七.聚酰胺6的注塑聚合工艺 (14) 八.PA6生产的污水处理 (15) 1处理工艺及设计参数 (16) 九.参考文献 (17)
摘要:聚酰胺6熔点较低,而且工艺温度范围很宽。由己内酰胺聚合而成,是聚酰胺系列中产量最多的一种。有水解聚合固相聚合等。 关键词:聚合、生产工艺、注塑、挤出 一.聚酰胺6的简介: 聚酰胺-6,即尼龙6,又叫PA6,聚酰胺6。中文名聚酰胺-6英文名Polycaprolactam别称锦纶-6;尼龙-6化学式C6H13NO 机械强度、刚度、硬度、韧性高、耐老化性能好、机械减振能力好、良好的滑动性、优异的耐磨性、机械加工性能好、用于精密有效控制时、无蠕动现象、抗磨性能良好、尺寸稳定性好。尼龙6的化学物理特性和尼龙66很相似,然而,它的熔点较低,而且工艺温度范围很宽。它的抗冲击性和抗溶解性比尼龙66塑料要好,但吸湿性也更强。因为塑件的许多品质特性都要受到吸湿性的影响,因此使用尼龙6设计产品时要充分考虑到这一点。为了提高尼龙6的机械特性,经常加入各种各样的改性剂。玻璃就是最常见的添加剂,有时为了提高抗冲击性还加入合成橡胶,如EPDM和SBR等。对于没有添加剂的产品,尼龙6塑胶原料的收缩率在1%到1.5%之间。加入玻璃纤维添加剂可以使收缩率降低到0.3%(但和流程相垂直的方向还要稍高一些)。成型组装的收缩率主要受材料结晶度和吸湿性影响。实际的收缩率还和塑件设计、壁厚及其它工艺参数成函数关系。二.聚酰胺6的的发展前景 21世纪时绿色、低碳、经济、环保的时代,聚酰胺树脂的发展,也应该遵守这个规律。但是,从聚酰胺树脂的生产过程中来看,存在着工艺流程长、工艺复杂、碳吸收率低、环境污染严重、能耗大等问题。采用绿色工艺、减少污染环境、简化工艺路线、采用先进的化工过程强化技术等已经成为聚酰胺生产发展的方向,目前前景看好。 三.聚酰胺6的原料及配方 3.1原料 原料:己内酰胺 环己酮—羟胺路线 非芳烃路线 聚酰胺加工配方:
第十七章总需求—总供给模型 1. 总需求曲线的理论来源是什么为什么在IS—LM模型中,由P(价格)自由变动,即可得到总需求曲线 解答:(1)总需求是经济社会对产品和劳务的需求总量,这一需求总量通常以产出水平来表示。一个经济社会的总需求包括消费需求、投资需求、政府购买和国外需求。总需求量受多种因素的影响,其中价格水平是一个重要的因素。在宏观经济学中,为了说明价格水平对总需求量的影响,引入了总需求曲线的概念,即总需求量与价格水平之间关系的几何表示。在凯恩斯主义的总需求理论中,总需求曲线的理论来源主要由产品市场均衡理论和货币市场均衡理论来反映。 (2)在IS—LM模型中,一般价格水平被假定为一个常数(参数)。在价格水平固定不变且货币供给为已知的情况下,IS曲线和LM曲线的交点决定均衡的收入(产量)水平。现用图17—1来说明怎样根据IS—LM图形来推导总需求曲线。 图17—1分上下两个部分。上图为IS—LM图。下图表示价格水平和需求总量之间的关系,即总需求曲线。当价格P的数值为P1时,此时的LM曲线LM(P1)与IS曲线相交于E1点,E1点所表示的国民收入和利率分别为y1和r1。将P1和y1标在下图中便得到总需求曲线上的一点D1。 现在假设P由P1下降到P2。由于P的下降,LM曲线移动到LM(P2)的位置,它与IS曲线的交点为E2点。E2点所表示的国民收入和利率分别为y2和r2。对应于上图中的点E2,又可在下图中找到D2点。按照同样的程序,随着P的变化,LM曲线和IS曲线可以有许多交点,每一个交点都代表着一个特定的y和P。于是就有许多P与y的组合,从而构成了下图中一系列的点。把这些点连在一起所得到的曲线AD便是总需求曲线。 从以上关于总需求曲线的推导中可以看到,总需求曲线表示社会的需求总量和价格水平之间的反向关系。即总需求曲线是向右下方倾斜的。向右下方倾斜的总需求曲线表示,价格水平越高,需求总量越小;价格水平越低,需求总量越大。 图17—1 2.为什么进行宏观调控的财政政策和货币政策一般被称为需求管理的政策 解答:财政政策是指政府变动税收和支出,以便影响总需求,进而影响就业和国民收入的政策。货币政策是指货币当局即中央银行通过银行体系变动货币供应量来调节总需求的政策。无论财政政策还是货币政策,都是通过影响利率、消费和投资进而影响总需求,使就业和国民收入得到调节的。通过对总需求的调节来调控宏观经济,所以财政政策和货币政策被称为需求管理政策。 3.总供给曲线的理论来源是什么
第一章 信息、消息、信号的定义?三者的关系? 通信系统的模型?各个主要功能模块及作用? 第二章 信源的分类? 自信息量、条件自信息量、平均自信息量、信源熵、不确定度、条件熵、疑义度、噪声熵、联合熵、互信息量、条件互信息量、平均互信息量以及相对熵的概念?计算方法? 冗余度? 具有概率为)(x i p 的符号x i 自信息量:)(log )(x x i i p I -= 条件自信息量:)(log )( y x y x i i i i p I -= 平均自信息量、平均不确定度、信源熵:∑-=i i i x x p p X H )(log )()( 条件熵:)(log ),()(),()(y x y x y x y x j i j ij i j i j ij i p p I p Y X H ∑∑-== 联合熵:),(log ),(),(),()(y x y x y x y x j i j ij i j i j ij i p p I p Y X H ∑∑-== 互信息:) ()(log )()() ()(log ),();(y x y x y x y x y y x j i j i j ij i j i j j ij i p p p p p p p Y X I ∑∑= = 熵的基本性质:非负性、对称性、确定性 2.3 同时掷出两个正常的骰子,也就是各面呈现的概率都为1/6,求: (1) “3和5同时出现”这事件的自信息; (2) “两个1同时出现”这事件的自信息; (3) 两个点数的各种组合(无序)对的熵和平均信息量; (4) 两个点数之和(即2, 3, … , 12构成的子集)的熵; (5) 两个点数中至少有一个是1的自信息量。 解:(1) bit x p x I x p i i i 170.418 1 log )(log )(18 1 61616161)(=-=-== ?+?= (2) bit x p x I x p i i i 170.536 1 log )(log )(361 6161)(=-=-== ?=
首页入门学 习 程序 员 计算机考 研 计算机电子书 下载 硬件知 识 网络知 识 专业课程答案 下载 视频教程下载 第一章 作者:佚名来源:网络 1、有一台计算机,具有IMB 内存,操作系统占用200KB ,每个用户进程各占200KB 。如果用户进程等待I/O 的时间为80 % ,若增加1MB 内存,则CPU 的利用率提高多少? 答:设每个进程等待I/O 的百分比为P ,则n 个进程同时等待刀O 的概率是Pn ,当n 个进程同时等待I/O 期间CPU 是空闲的,故CPU 的利用率为1-Pn。由题意可知,除去操作系统,内存还能容纳4 个用户进程,由于每个用户进程等待I/O的时间为80 % , 故: CPU利用率=l-(80%)4 = 0.59 若再增加1MB 内存,系统中可同时运行9 个用户进程,此时:cPu 利用率=l-(1-80%)9 = 0.87 故增加IMB 内存使CPU 的利用率提高了47 % : 87 %/59 %=147 % 147 %-100 % = 47 % 2 一个计算机系统,有一台输入机和一台打印机,现有两道程序投入运行,且程序A 先开始做,程序B 后开始运行。程序A 的运行轨迹为:计算50ms 、打印100ms 、再计算50ms 、打印100ms ,结束。程序B 的运行轨迹为:计算50ms 、输入80ms 、再计算100ms ,结束。试说明(1 )两道程序运行时,CPU有无空闲等待?若有,在哪段时间内等待?为什么会等待?( 2 )程序A 、B 有无等待CPU 的情况?若有,指出发生等待的时刻。 答:画出两道程序并发执行图如下: (1)两道程序运行期间,CPU存在空闲等待,时间为100 至150ms 之间(见图
第4章存储管理 “练习与思考”解答 1.基本概念和术语 逻辑地址、物理地址、逻辑地址空间、内存空间、重定位、静态重定位、动态重定位、碎片、碎片紧缩、虚拟存储器、快表、页面抖动 用户程序经编译之后的每个目标模块都以0为基地址顺序编址,这种地址称为相对地址或逻辑地址。 内存中各物理存储单元的地址是从统一的基地址开始顺序编址的,这种地址称为绝对地址或物理地址。 由程序中逻辑地址组成的地址范围叫做逻辑地址空间,或简称为地址空间。 由内存中一系列存储单元所限定的地址范围称作内存空间,也称物理空间或绝对空间。 程序和数据装入内存时,需对目标程序中的地址进行修改。这种把逻辑地址转变为内存物理地址的过程称作重定位。 静态重定位是在目标程序装入内存时,由装入程序对目标程序中的指令和数据的地址进行修改,即把程序的逻辑地址都改成实际的内存地址。 动态重定位是在程序执行期间,每次访问内存之前进行重定位。这种变换是靠硬件地址转换机构实现的。 内存中这种容量太小、无法被利用的小分区称作“碎片”或“零头”。 为解决碎片问题,移动某些已分配区的内容,使所有进程的分区紧挨在一起,而把空闲区留在另一端。这种技术称为紧缩(或叫拼凑)。 虚拟存储器是用户能作为可编址内存对待的虚拟存储空间,它使用户逻辑存储器与物理存储器分离,是操作系统给用户提供的一个比真实内存空间大得多的地址空间。 为了解决在内存中放置页表带来存取速度下降的矛盾,可以使用专用的、高速小容量的联想存储器,也称作快表。 若采用的置换算法不合适,可能出现这样的现象:刚被换出的页,很快又被访问,为把它调入而换出另一页,之后又访问刚被换出的页,……如此频繁地更换页面,以致系统的大部分时间花费在页面的调度和传输上。此时,系统好像很忙,但实际效率却很低。这种现象称为“抖动”。 2.基本原理和技术 (1)存储器一般分为哪些层次?各有何特性? 存储器一般分为寄存器、高速缓存、内存、磁盘和磁带。 CPU内部寄存器,其速度与CPU一样快,但它的成本高,容量小。 高速缓存(Cache),它们大多由硬件控制。Cache的速度很快,它们放在CPU内部或非常靠近CPU的地方。但Cache的成本很高,容量较小。 内存(或称主存),它是存储器系统的主力,也称作RAM(随机存取存储器)。CPU可以直接存取内存及寄存器和Cache中的信息。然而,内存中存放的信息是易变的,当机器电源被关闭后,内存中的信息就全部丢失了。 磁盘(即硬盘),称作辅助存储器(简称辅存或外存),它是对内存的扩展,但是CPU不能直接存取磁盘上的数据。磁盘上可以永久保留数据,而且容量特别大。磁盘上数据的存取速度低于内存存取速度。 磁带保存的数据更持久,容量更大,但它的存取速度很慢,而且不适宜进行随机存取。所以,磁带设备一般不能用做辅存。它的主要用途是作为文件系统的后备,存放不常用的信息或用做系统间传送信息的介质。 (2)装入程序的功能是什么?常用的装入方式有哪几种? 装入程序的功能是根据内存的使用情况和分配策略,将装入模块放入分配到的内存区中。 程序装入内存的方式有三种,分别是绝对装入方式、可重定位装入方式和动态运行时装入方式。
第17章 光的衍射答案 17-2. 衍射的本质是什么?衍射和干涉有什么联系和区别? 答:光波的衍射现象是光波在传播过程中经过障碍物边缘或孔隙时发生的展衍现象,其实质是由被障碍物或孔隙的边缘限制的波振面上各点发出的子波相互叠加而产生。而干涉则是由同频率、同方向、相位差恒定的两束光波的叠加而成。 17-7. 光栅衍射和单缝衍射有何区别?为何光栅衍射的明条纹特别明亮而暗区很宽? 答:光栅衍射是多光束干涉和单缝衍射的总效果。其明条纹主要取决于多光束干涉,光强与狭缝数成正比,所以明纹很亮;又因为相邻明条纹间有个暗条纹,而且一般较宽,所以实际上在两条明条纹之间形成一片黑暗背景。 17-8. 试指出当衍射光栅常数为下述三种情况时,哪些级次的衍射明条纹缺级?(1)a+b=2a; (2)a+b=3a; (3)a+b=4a. 答:当(1)a+b=2a 时,±2,±4,±6…2k…(k=±1,±2,…)级缺级; 当(2)a+b=3a 时,±3,±6,±9…3k…(k=±1,±2,…)级缺级; 当(3)a+b=4a 时,±4,±8,±12…4k…(k=±1,±2,…)级缺级。 17-9. 一单色平行光垂直照射一单缝,若其第三级明条纹位置正好与600nm 的单色平行光的第二级明条纹位置相重合,求前一种单色光的波长。 解:单缝衍射的公式为: 2)12(sin λ θ+=k a 当nm 600=λ时,k=2, ' λλ=时,k=3, 当其第三级明条纹位置正好与600nm 的单色平行光的第二级明条纹位置相重合时,θ相同,所以有: 2 )132(2600)122(sin ' λθ+?=+?=a 由上式可以解得 nm 6.428'=λ 17-10. 单缝宽0.10mm ,透镜焦距为50cm ,用5000=λ埃的绿光垂直照射单缝,求:(1)位于透镜焦平面处的屏幕上中央明条纹的宽度和半角宽度各为多少? (2)若把此装置浸入水中(),中央明条纹的半角宽度又为多少? 解:中央明纹的宽度为f na x λ 2=?,半角宽度为na λ θ1sin -= (1)在空气中,1=n ,所以有 3310100.55.01010.010500022---?=????==?f na x λ m 3310 1 1100.51010.0105000sin sin -----?=??==na λθrad
第二章 信息量与熵 2、2 八元编码系统,码长为3,第一个符号用于同步,每秒1000个码字,求它的信息速率。 解:同步信息均相同,不含信息,因此 每个码字的信息量为 2?8log =2?3=6 bit 因此,信息速率为 6?1000=6000 bit/s 2、3 掷一对无偏骰子,告诉您得到的总的点数为:(a) 7; (b) 12。问各得到多少信息量。 解:(1) 可能的组合为 {1,6},{2,5},{3,4},{4,3},{5,2},{6,1} )(a p =366=6 1 得到的信息量 =)(1log a p =6log =2、585 bit (2) 可能的唯一,为 {6,6} )(b p =36 1 得到的信息量=)(1log b p =36log =5、17 bit 2、4 经过充分洗牌后的一副扑克(52张),问: (a) 任何一种特定的排列所给出的信息量就是多少? (b) 若从中抽取13张牌,所给出的点数都不相同时得到多少信息量? 解:(a) )(a p =! 521 信息量=) (1log a p =!52log =225、58 bit (b) ???????花色任选 种点数任意排列 13413!13 )(b p =1352 134!13A ?=135213 4C 信息量=1313524log log -C =13、208 bit 2、9 随机掷3颗骰子,X 表示第一颗骰子的结果,Y 表示第一与第二颗骰子的点数之与,Z 表 示3颗骰子的点数之与,试求)|(Y Z H 、)|(Y X H 、),|(Y X Z H 、)|,(Y Z X H 、)|(X Z H 。 解:令第一第二第三颗骰子的结果分别为321,,x x x ,1x ,2x ,3x 相互独立,则 1x X =,21x x Y +=,321x x x Z ++= )|(Y Z H =)(3x H =log 6=2、585 bit )|(X Z H =)(32x x H +=)(Y H =2?(361log 36+362log 18+363log 12+364log 9+365log 536)+36 6log 6 =3、2744 bit )|(Y X H =)(X H -);(Y X I =)(X H -[)(Y H -)|(X Y H ] 而)|(X Y H =)(X H ,所以)|(Y X H = 2)(X H -)(Y H =1、8955 bit 或)|(Y X H =)(XY H -)(Y H =)(X H +)|(X Y H -)(Y H 而)|(X Y H =)(X H ,所以)|(Y X H =2)(X H -)(Y H =1、8955 bit ),|(Y X Z H =)|(Y Z H =)(X H =2、585 bit )|,(Y Z X H =)|(Y X H +)|(XY Z H =1、8955+2、585=4、4805 bit
第一章绪论 1.什么是操作系统的基本功能? 答:操作系统的职能是管理和控制汁算机系统中的所有硬、软件资源,合理地组织计算 机工作流程,并为用户提供一个良好的工作环境和友好的接口。操作系统的基本功能包括: 处理机管理、存储管理、设备管理、信息管理(文件系统管理)和用户接口等。 2.什么是批处理、分时和实时系统?各有什么特征? 答:批处理系统(batchprocessingsystem):操作员把用户提交的作业分类,把一批作业编成一个作业执行序列,由专门编制的监督程序(monitor)自动依次处理。其主要特征是:用户脱机使用计算机、成批处理、多道程序运行。 分时系统(timesharingoperationsystem):把处理机的运行时间分成很短的时间片,按时间片轮转的方式,把处理机分配给各进程使用。其主要特征是:交互性、多用户同时性、独立性。 实时系统(realtimesystem):在被控对象允许时间范围内作出响应。其主要特征是:对实时信息分析处理速度要比进入系统快、要求安全可靠、资源利用率低。 3.多道程序(multiprogramming)和多重处理(multiprocessing)有何区别? 答;多道程序(multiprogramming)是作业之间自动调度执行、共享系统资源,并不是真正地同时执行多个作业;而多重处理(multiprocessing)系统配置多个CPU,能真正同时执行多道程序。要有效使用多重处理,必须采用多道程序设计技术,而多道程序设计原则上不一定要求多重处理系统的支持。 4.讨论操作系统可以从哪些角度出发,如何把它们统一起来? 答:讨论操作系统可以从以下角度出发: (1)操作系统是计算机资源的管理者; (2)操作系统为用户提供使用计算机的界面; (3)用进程管理观点研究操作系统,即围绕进程运行过程来讨论操作系统。
第十七章索赔 一、思考题 1.简述在国际货物买卖中争议产生的原因。 答:国际货物买卖中,争议的产生往往是因买卖双方的各自的权利、义务问题而引起的,甚至导致发生仲裁、诉讼等情况。买卖双方发生争议的原因有很多,主要可归结为以下三种情况: (1)卖方不履行或不完全履行合同规定的义务。例如,不交付货物或虽然交货但所交货物的品质、数量、包装等不符合合同规定。 (2)买方不履行或不完全履行合同规定的义务。例如,不能按照合同规定派船接货、指定承运人、支付货款或开出信用证,无理拒收货物等。 (3)合同中所订条款欠明确。例如,“立即装运”、“即期装运”,在国际贸易中无统一解释,买卖双方对此理解不一致或从本身的利益出发各执一词。 2.各国法律对于违约行为的区分方法有哪些区别?对于不同违约行为的违约责任又是如何规定的? 答:(1)我国《合同法》的相关规定 我国《合同法》第8条规定:“依法成立的合同,对当事人具有法律约束力。当事人应当按照约定履行自己的义务,不得擅自变更或者解除合同。”第107条规定:“当事人一方不履行合同义务或者履行合同义务不符合约定的,应当承担继续履行、采取补救措施或者赔偿损失等违约责任。” 我国《合同法》规定:当事人一方迟延履行合同义务或者有其他违约行为致使不能实现合同目的,对方当事人可以解除合同;当事人一方迟延履行主要债务,经催告后在合同期间内仍未履行的,对方当事人可以解除合同。《合同法》又规定,合同解除后,尚未履行的,终止履行;已经履行的,根据履行情况和合同性质,当事人可以要求恢复原状、采取其他补救措施,并有权要求赔偿损失。 (2)英国法律的相关规定 英国的法律规定,当事人一方“违反要件”,受损害一方除可要求损害赔偿外,还有权解除合同;当事人一方“违反担保”或“违反随附条件”,受损害一方有权请求违约的一方给予损害赔偿,但不能解除合同;当事人一方“违反中间性条款或无名条款”,违约方应承担的责任须视违约的性质及其后果是否严重而定。 (3)美国法律的相关规定 美国法律规定,一方当事人违约,以致使另一方无法取得该交易的主要利益,则是“重大违约”。在此情况下,受损害的一方有权解除合同,并要求损害赔偿。如果一方违约,情况较为轻微,并未影响对方在该交易中取得的主要利益,则为“轻微违约”,受损害的一方只能要求损害赔偿,而无权解除合同。 (4)《联合国国际货物销售合同公约》的相关规定 按《联合国国际货物销售合同公约》规定,一方当事人违反合同的结果,如使另一方当事人蒙受损害,以至于实际上剥夺了他根据合同规定有权期待得到的东西,即为根本违反合同。若一方违反合同构成根本违反合同时,受损害的一方就可以宣告合同无效,同时有权向违约方提出损害赔偿的要求。如违约的情况尚未达到根本违反合同的程度,则受损害方只能要求损害赔偿而不能宣告合同无效。 3.何谓索赔期限?为什么在国际货物买卖合同的索赔条款中通常应规定索赔期限? 答:(1)索赔期限的含义
信息论与编码习题参考答案 第一章 单符号离散信源 同时掷一对均匀的子,试求: (1)“2和6同时出现”这一事件的自信息量; (2)“两个5同时出现”这一事件的自信息量; (3)两个点数的各种组合的熵; (4)两个点数之和的熵; (5)“两个点数中至少有一个是1”的自信息量。 解: bit P a I N n P bit P a I N n P c c N 17.536log log )(361 )2(17.418log log )(362)1(36 662221111 616==-=∴====-=∴== =?==样本空间: (3)信源空间:
bit x H 32.436log 36 16236log 36215)(=??+?? =∴ (4)信源空间: bit x H 71.3636 log 366536log 3610 436log 368336log 366236log 36436log 362)(=??+?+?+??= ∴++ (5) bit P a I N n P 17.111 36 log log )(3611333==-=∴== 如有6行、8列的棋型方格,若有两个质点A 和B ,分别以等概落入任一方格内,且它们的坐标分别为(Xa ,Ya ), (Xb ,Yb ),但A ,B 不能同时落入同一方格内。 (1) 若仅有质点A ,求A 落入任一方格的平均信息量; (2) 若已知A 已落入,求B 落入的平均信息量; (3) 若A ,B 是可辨认的,求A ,B 落入的平均信息量。 解: bit a P a P a a P a I a P A i 58.548log )(log )()(H 48log )(log )(481 )(:)1(48 1 i i i i i ==-=∴=-=∴= ∑=落入任一格的概率Θ bit b P b P b b P b I b P A i 55.547log )(log )()(H 47 log )(log )(47 1 )(:B ,)2(48 1i i i i i ==-=∴=-=∴=∑=落入任一格的概率是落入任一格的情况下在已知Θ
《操作系统教程》习题答案
习题1 1.单项选择题 (1)大中小型计算机是以为中心的计算机系统。 A、CPU B、存储器 C、系统总线 D、通道 (2)以下关于操作系统的说法正确的是。 A、批处理系统是实现人机交互的系统 B、批处理系统具有批处理功能,但不具有交互能力 C、分时系统是实现自动控制,无须人为干预的系统 D、分时系统即具有分时交互能力,又具有批处理能力 (3)操作系统的职能是管理软硬件资源、合理地组织计算机工作流程和。 A、为用户提供良好的工作环境和接口 B、对用户的命令作出快速响应 C、作为服务机构向其它站点提供优质服务 D、防止有人以非法手段进入系统 (4)设计实时操作系统时,首先应考虑系统的。 A、可靠性和灵活性 B、实时性和可靠性 C、优良性和分配性 D、灵活性和分配性 (5)多道程序设计是指。 A、在分布式系统中同一时刻运行多个程序 B、在一台处理器上并行运行多个程序 C、在实时系统中并发运行多个程序 D、在一台处理器上并发运行多个程序 (6)以下关于并发性和并行性的说法正确的是。 A、并发性是指两个及多个事件在同一时刻发生 B、并发性是指两个及多个事件在同一时间间隔内发生 C、并行性是指两个及多个事件在同一时间间隔内发生 D、并发性是指进程,并行性是指程序 (1)B (2)B (3)A (4)B (5)D (6)B 2.填空题 (1)微机是以总线为纽带构成的计算机系统。 (2)在批处理兼分时系统中,往往把由分时系统控制的作业称为前台作业,把由批处理系统控制的作业称为后台作业。 (3)在分时系统中,若时间片长度一定,则用户数越多,系统响应时间越慢。 (4)分布式操作系统能使系统中若干台计算机协同完成一个共同的任务,分解问题成为子计算并使之在系统中各台计算机上并行执行,以充分利用各计算机的优势。 (5)用户通过网络操作系统可以网络通信、资源共享,从而大大扩展了计算机的应用范围。 3.简答题 (1)什么是操作系统?现代操作系统的基本特征是什么?并发性 (2)什么是批处理系统,衡量批处理系统好坏的主要指标是什么?及时性 (3)试述分时系统的原理及其特性。时间片原则交互性同时性独立性及时性
第十七章第一节《电流与电压和电阻的关系》 在探究电阻一定时电流与电压关系的实验中,小明得到的实验数据如下表所示。 (1)为分析电流与电压的定量关系,请你在图17.1-2 的方格中建立有关坐标轴并制定其标度,把表中的数据 在坐标系中描点。 (2)小英说,从图中可以看出,这些数据中有一组是 明显错误的,跟其他数据的规律完全不同,可能是读取 这组数据时粗心所引起的,分析时需要把它剔除掉。这 是哪组数据? 2. 在电阻一定时探究电流与电压关系的实验中,小凯把 定值电阻、电流表、电压表、滑动变阻器、开关和电源 连接成了图17.1-3 所示的电路,正准备闭合开关时,旁 边的小兰急忙拦住他,说接线错了。 请你检查一下电路,错在哪里?小兰发现只要改接一根导线就可以,请把接错的那一根导线找出来,打上“×”,再画线把它改到正确的位置上。 第一节《电流与电压和电阻的关系》课后习题答案 1.(1)图略 (2)“1.2V 0.40A”这组数据跟其他数据的规律完全不同,需要剔除。 2.如图所示 ×
第十七章第二节《欧姆定律》 1. 一个电熨斗的电阻是80 Ω,接在220 V 的电压上,流过它的电流是多少? 2. 一个定值电阻的阻值是10 Ω,使用时流过的电流是200 mA ,加在这个定值电 阻两端的电压是多大? 3. 某小灯泡工作时两端的电压是2.5 V ,用电流表测得此时的电流是300 mA ,此 灯泡工作时的电阻是多少? 4. 某同学认为:“由I = U/R 变形可得R = U/I 。这就表明,导体的电阻R 跟它两端的电压成正比,跟电流成反比。”这种说法对吗?为什么? 第二节《欧姆定律》课后习题答案 1. 2.75A 2. 2V 3. 8.3Ω 解析:1.根据公式I=R U 2.根据公式U=IR 3.根据公式R = U/I 4.这种说法不对,因为导体的电阻是导体本身的一种性质,它只与导体的材料、长度、横截面积有关,还受温度影响,而与导体两端的电压及通过导体的电流大小无关,公式R = U/I 只是一个电阻的计算式,通过此公式可以求出导体的电阻,但不能决定导体电阻的大小,当导体不接入电路时,其阻值不会改变。 第十七章第三节《电阻的测量》 1. 一个小灯泡上标着“ 2.2 V 0.25 A ”,表明这个小灯泡工作时的电 阻是8.8 Ω。图17.3-2 是一位同学为检 验小灯泡的标称电阻是否准确而连接的 实验线路。他的连接有三个错误。请你 指出这三个错误分别错在哪里。应怎样 改成正确的连接? 2. 已知流过一只电阻为242 Ω 的灯泡的电流是0.91 A 。如果在灯泡两端再并联一个电阻为165 Ω 的电烙铁,并联电路的总电流变为多大? 3. 图17.3-3 是用伏安法测量某未知电阻的电路图。 (1)根据电路图将图17.3-4 所示的实物图连接起来; (2)读出图17.3-5 所示电流表和电压表的示数; (3)算出被测电阻本次的测量值。
I (X ;Y=1)= P(x/Y 1)I(x;Y 1) x P(x/Y 1)log P(x/Y 1) P(x) = P(X 0/Y 1)log P(X 0/Y 1) P(X 0) P(X 1/Y 1)log P(X 1/Y 1) P(X 1) 部分答案,仅供参考。 信息速率是指平均每秒传输的信息量点和划出现的信息量分别为log3Jog3, 2’ 一秒钟点和划出现的次数平均为 1 15 2 1 ~4 0.20.4 - 3 3 一秒钟点和划分别出现的次数平均为巴5 4 4 那么根据两者出现的次数,可以计算一秒钟其信息量平均为10 log 3 5 竺 5 4 2 4 4 2 解: ⑻骰子A和B,掷出7点有以下6种可能: A=1,B=6; A=2,B=5; A=3,B=4; A=4,B=3; A=5,B=2; A=6,B=1 概率为6/36=1/6,所以信息量 -log(1/6)=1+log3 ~ bit (b)骰子A和B,掷出12点只有1种可能: A=6,B=6 概率为1/36,所以信息量 -log(1/36)=2+log9 ~ bit 解: 出现各点数的概率和信息量: 1 点:1/21 , log21 ?bit ; 2 点:2/21 , log21-1 ?bit ; 3 点:1/7 , log7 4 点:4/21 , log21-2 5 点:5/21 , log (21/5 )~; 6 点:2/ 7 , log(7/2)? 平均信息量: (1/21) X +(2/21) X +(1/7) X +(4/21) X +(5/21) X +(2/7) 解: X=1:考生被录取;X=0考生未被录取; Y=1:考生来自本市;Y=0考生来自外地; Z=1:考生学过英语;z=o:考生未学过英语 P(X=1)=1/4, P( X=q=3/4; P( Y=1/ X=1)=1/2 ;P( Y=1/ X=0)=1/10 ;P(Z=1/ Y=1 )=1, P( Z=1/ X=0, Y=0 )=, P( Z=1/ X=1, Y=0 )=, P(Z=1/Y=0)= (a)P(X=0,Y=1)=P(Y=1/X=0)P(X=0)=, P(X=1,Y=1)= P(Y=1/X=1)P(X=1)= P(Y=1)= P(X=0,Y=1)+ P(X=1,Y=1)= P(X=0/Y=1)=P(X=0,Y=1)/P(Y=1)=, P(X=1/Y=1)=P(X=1,Y=1)/P(Y=1)=
第一章: 一、3、10、15、23、27、35 3.什么是操作系统?操作系统在计算机系统中的主要作用是什么? 操作系统是管理系统资源、控制程序执行、改善人机界面、提供各种服务,并合理组织计算机工作流程和为用户有效地使用计算机提供良好运行环境的一种系统软件. 主要作用 (1)服务用户—操作系统作为用户接口和公共服务程序 (2)进程交互—操作系统作为进程执行的控制者和协调者 (3)系统实现—操作系统作为扩展机或虚拟机 (4)资源管理—操作系统作为资源的管理者和控制者 10.试述系统调用与函数(过程)调用之间的区别。 (1)调用形式和实现方式不同; (2)被调用的代码位置不同; (3)提供方式不同 15.什么是多道程序设计?多道程序设计有什么特点? 多道程序设计是指允许多个作业(程序)同时进入计算机系统内存并执行交替计算的方法。从宏观上看是并行的,从微观上看是串行的。 (1)可以提高CPU、内存和设备的利用率; (2)可以提高系统的吞吐率,使单位时间内完成的作业数目增加; (3)可以充分发挥系统的并行性,使设备和设备之间,设备和CPU之间均可并行工作。 23.现代操作系统具有哪些基本功能?请简单叙述之。 (1)处理器管理; (2)存储管理; (3)设备管理; (4)文件管理; (5)联网与通信管理。 27.什么是操作系统的内核? 内核是一组程序模块,作为可信软件来提供支持进程并发执行的基本功能和基本操作,通常驻留在内核空间,运行于内核态,具有直接访问计算机系统硬件设备和所有内存空间的权限,是仅有的能够执行特权指令的程序。 35.简述操作系统资源管理的资源复用技术。
系统中相应地有多个进程竞争使用资源,由于计算机系统的物理资源是宝贵和稀有的,操作系统让众多进程共享物理资源,这种共享称为资源复用。 (1)时分复用共享资源从时间上分割成更小的单位供进程使用; (2)空分复用共享资源从空间上分割成更小的单位供进程使用。 . 二、2、5 2、答:画出两道程序并发执行图如下: (1) (见图中有色部分)。 (2)程序A无等待现象,但程序B有等待。程序B有等待时间段为180ms至200ms间(见 图中有色部分)。 5、答:画出三个作业并行工作图如下(图中着色部分为作业等待时间):
“聚合过程原理”习题
“聚合过程原理”习题 第二章 1. 按物料的相态、结构形式、操作方式和流体流动及混合形式分类,反应器可分为那几类? 2. 名词解释:返混;微观混合; 宏观混合; 停留时间分布函数; 停留时间分布密度函数; 平均停留时间;有效利用系数 3. 理想反应器设计的基本原理是什么? 4. 反应器的流动模型有哪些?各有何特点? 5. 平推流及理想混合反应器的停留时间分布有何特点? 6. 返混对简单反应、复杂反应和连串反应各有何影响? 7. 描述连续式反应器的重要性质有哪些? 8. 微观混合和宏观混合对理想混合反应器各有何影响? 第三章 1. 在双分子热引发和双基终止时,间歇式和连续全混式反应釜对产物的转化率、累积平均聚合度有何影响? 2. 在阳离子聚合中,采用间歇操作和连续操作对其转化率和平均聚合度和分子量分布有何影响? 3. 要制取高分子量的缩聚物时,在理论上和操作方式上可采取哪些措施? 4. 间歇操作的和连续全混反应釜对缩聚反应的分子量分布有何影响? 第四章 1. 非牛顿流体可分为几类?各有何主要特征? 2. 影响高聚物剪切流动曲线的因素有哪些? 3. 宾汉塑性流体为何具有屈服应力? 4. 名词解释:入口效应;孔口膨大(Barns)效应;弹性回缩现象;法向应力效应;Toms效应 5. 利用幂律模型如何计算流动行为指数n? 6. 为何流体的假塑性行为只表现在某一剪切速率范围内?
7. 指出下列体系可能属于哪种非牛顿流体类型?高分子凝胶,饱和聚酯溶液,牙膏,聚丙烯熔体。 8. 可采用哪些仪器和方法可测量非牛顿流体的流变特性? 9. 试讨论高聚物的平均分子量及分子量分布对其剪切流动曲线的影响. 10. 为何胀塑性流体的粘度随剪切应力的增加而增大? 第五章 1. 工艺过程对搅拌的要求主要有哪几种?各起何作用? 2. 漩涡对聚合过程有何影响?工业上可采取哪些措施消除搅拌所产生的漩涡? 3. 说明Navier-Stokes方程式和无因次Navier-Stokes方程式中各项所代表的物理意义。 4. 解释功率准数、无因次速度、泵送准数和无因次混合时间的物理意义。 5.工业上处理不相溶液体有哪些方法?各起何作用? 6. 在分散体系中,有哪些力作用于分散相?对分散相起什么作用? 7. 在“混合和搅动”及“悬浮”类型的聚合体系中,搅拌任务的“尺度” 和“难度”各指什么? 8. 表征搅拌器特性和行为的无因次准数有哪些?各与流体及搅拌器的什么特征有关?9. 搅拌器功率计算和压力计算的基础是什么? 10. 什么是搅拌过程的混合时间?它与搅拌过程有何联系? 11. 搅拌器的设计中主要应确定哪些参数? 12. 在搅拌聚合釜的放大时,着重需考虑的问题是什么? “方次法则”中的指数有何意义? 第六章 1. 在聚合过程中,可采取哪些措施控制聚合反应所产生的热量? 2. 说出搅拌聚合釜的几种传热方式和作用 . 3. 可采用那些方法提高总包传热系数K的值? 4. 阐述搅拌分散过程和传质过程的关系,它们与搅拌器的设计有何联系?
17-1解1)选择型号:因此类机组一般为中小型,所需传递的功率中等,直流发电机载荷平稳, 轴的 弯曲变形较小,联接之后不再拆动,故选用传递转矩大、结构简单的固定式刚性联轴器,如凸缘联轴器。 2)按传递最大功率『=刘世求计算转矩 P 20 『=9劳。==曲50尺三二=砧.粉叫.厢 转矩用3000 。 由教材表17-1查得,当工作机为发电机时的工作情况系数《* T 3。则计算转矩 T c=K1T=L3^63.i? = S2.71N.m 根据计算转矩、轴的转速邱=3叩° '『面、夕卜伸轴直径d=45mm 查手册,可用标准 GB5843- 1986饺制孔型凸缘联轴器YL9。其许用转矩为】『]=地口由,皿,许用最大转速 卜5。。〃血" 他主要尺寸:螺栓孔中心所在圆直径孔=[[?洒,6只M10螺栓。 17-2 解(1 )选择型号:因汽轮发电机组的转子较重,传递的转矩特大,轴有一定的弯曲变形,工作环境为高温高压蒸汽,轴有伸长,故选用耐温的齿式联轴器。 (2 )求计算转矩 T=95如-=蜘队—=9550M m 转矩H300。。 由教材表17-1,当工作机为发电机原动机为汽轮机时的工作情况系数仍可取虻,=13。则计算转矩 3^ = £i r=L3x 5530 = 12415JVm
根据计算转矩、轴的转速H = U叩叮血、夕卜伸轴直径d=120mm 查手册,可用标准 ZB19012- 1989GCLD型鼓型齿式联轴器GCLD7。其许用转矩为[门颁°加'巾,许用最大转速 =300Cr/min 17-3 图17.2 题17-3图图17.3 题17-3解图 解可选用一超越离合器,如图17.3所示。电动机1和电动机2的转速是相同的,但电动机1经过蜗杆蜗轮传动后,转速降至氐'L,并有啊4气j。当两电机同时开动时,因心L Y,超越离合器松开, 传不到轴上,口=轴由电机2带动。若电动机1开动后,再停止电动机2,那么当电动机2停止转动 时,= 口,》成日,超越离合器被滚珠楔紧带动°!轴旋转。所以任何时间都不会卡死。 17-4 图17.4 题17-4图
第2章习题 2-3 同时掷两个正常的骰子,也就是各面呈现的概率都是l/6,求: (1) “3和5同时出现”事件的自信息量; (2)“两个1同时出现”事件的自信息量; (3)两个点数的各种组合(无序对)的熵或平均信息量; (4) 两个点数之和(即 2,3,…,12构成的子集)的熵; (5)两个点数中至少有一个是1的自信息。 解:(1)P (3、5或5、3)=P (3、5)+P (5、3)=1/18 I =log2(18)= 。 (2)P (1、1)=l/36。I =log2(36)=。 (3)相同点出现时(11、22、33、44、55、66)有6种,概率1/36。 不同点出现时有15种,概率1/18。 H (i ,j )=6*1/36*log 2(36)+15*1/18*log 2(18)=事件。 (4) H(i+j)=H(1/36 2/36 3/36 4/36 5/36 6/36 5/36 4/36 3/36 2/36 1/36) =事件。 (5)P (1、1or1、j or i 、1)=1/36+5/36+5/36=11/36。 I =log2(36/11)= 2-5 居住某地区的女孩中有25%是大学生,在女大学生中有75%身高为1.6m 以 上,而女孩中身高1.6m 以上的占总数一半。假如得知“身高1.6m 以上的某女孩是大学 生”的消息,问获得多少信息量、 解:P (女大学生)=1/4;P (身高>1.6m / 女大学生)=3/4;P (身高>1.6m )=1/2; P (女大学生 / 身高>1.6m )=P (身高>1.6m 、女大学生)/P (身高>1.6m ) =3/4*1/4*2=3/8 I =log2(8/3)=。 2-7两个实验123{,,}X x x x =和123{,,}Y y y y =,联合概率()i j ij p x y p =为 11121321222331 32 337/241/2401/241/41/2401/247/24p p p p p p p p p ???? ????=???????????? (1)如果有人告诉你X 和Y 的实验结果,你得到的平均信息量是多少
《操作系统教程》习题答案 习题1 1(单项选择题 (1)大中小型计算机是以为中心的计算机系统。 A、CPU B、存储器 C、系统总线 D、通道 (2)以下关于操作系统的说法正确的是。 A、批处理系统是实现人机交互的系统 B、批处理系统具有批处理功能,但不具有交互能力 C、分时系统是实现自动控制,无须人为干预的系统 D、分时系统即具有分时交互能力,又具有批处理能力 (3)操作系统的职能是管理软硬件资源、合理地组织计算机工作流程和。 A、为用户提供良好的工作环境和接口 B、对用户的命令作出快速响应 C、作为服务机构向其它站点提供优质服务 D、防止有人以非法手段进入系统 (4)设计实时操作系统时,首先应考虑系统的。 A、可靠性和灵活性 B、实时性和可靠性 C、优良性和分配性 D、灵活性和分配性 (5)多道程序设计是指。 A、在分布式系统中同一时刻运行多个程序 B、在一台处理器上并行运行多个程序 C、在实时系统中并发运行多个程序 D、在一台处理器上并发运行多个程序
(6)以下关于并发性和并行性的说法正确的是。 A、并发性是指两个及多个事件在同一时刻发生 B、并发性是指两个及多个事件在同一时间间隔内发生 C、并行性是指两个及多个事件在同一时间间隔内发生 D、并发性是指进程,并行性是指程序 (1)B (2)B (3)A (4)B (5)D (6)B 2(填空题 (1)微机是以总线为纽带构成的计算机系统。 (2)在批处理兼分时系统中,往往把由分时系统控制的作业称为前台作业,把由批 处理系统控制的作业称为后台作业。 (3)在分时系统中,若时间片长度一定,则用户数越多,系统响应时间越慢。 (4)分布式操作系统能使系统中若干台计算机协同完成一个共同的任务,分解问 题成为子计算并使之在系统中各台计算机上并行执行,以充分利用各计算机的优势。 (5)用户通过网络操作系统可以网络通信、资源共享,从而大大扩展了计算机的 应用范围。 3(简答题 (1)什么是操作系统,现代操作系统的基本特征是什么, 并发性 (2)什么是批处理系统,衡量批处理系统好坏的主要指标是什么, 及时性 (3)试述分时系统的原理及其特性。时间片原则交互性同时性独立性及时性 (4)操作系统有哪几大特征,它的最基本特征是什么, 并发性虚拟性共享性异步性最基本特征并发性