自动门控制装置
1 控制要求
1)当有人由内到外或由外到内通过光电检测开关K1或K2时,开门执行机构KM1动作,电动机正转,到达开门限位开关K3位置时,电机停止运行。
2)自动门在开门位置停留8秒后,自动进入关门过程,关门执行机构KM2被起动,电动机反转,当门移动到关门限位开关K4位置时,电机停止运行。
3)在关门过程中,当有人员由外到内或由内到外通过光电检测开关K2或K1时,应立即停止关门,并自动进入开门程序。
4)在门打开后的8秒等待时间内,若有人员由外至内或由内至外通过光电检测开关K2或K1时,必须重新开始等待8秒后,再自动进入关门过程,以保证人员安全通过。
2 设计编程元件地址分配表
2.1 I/O口地址分配分析
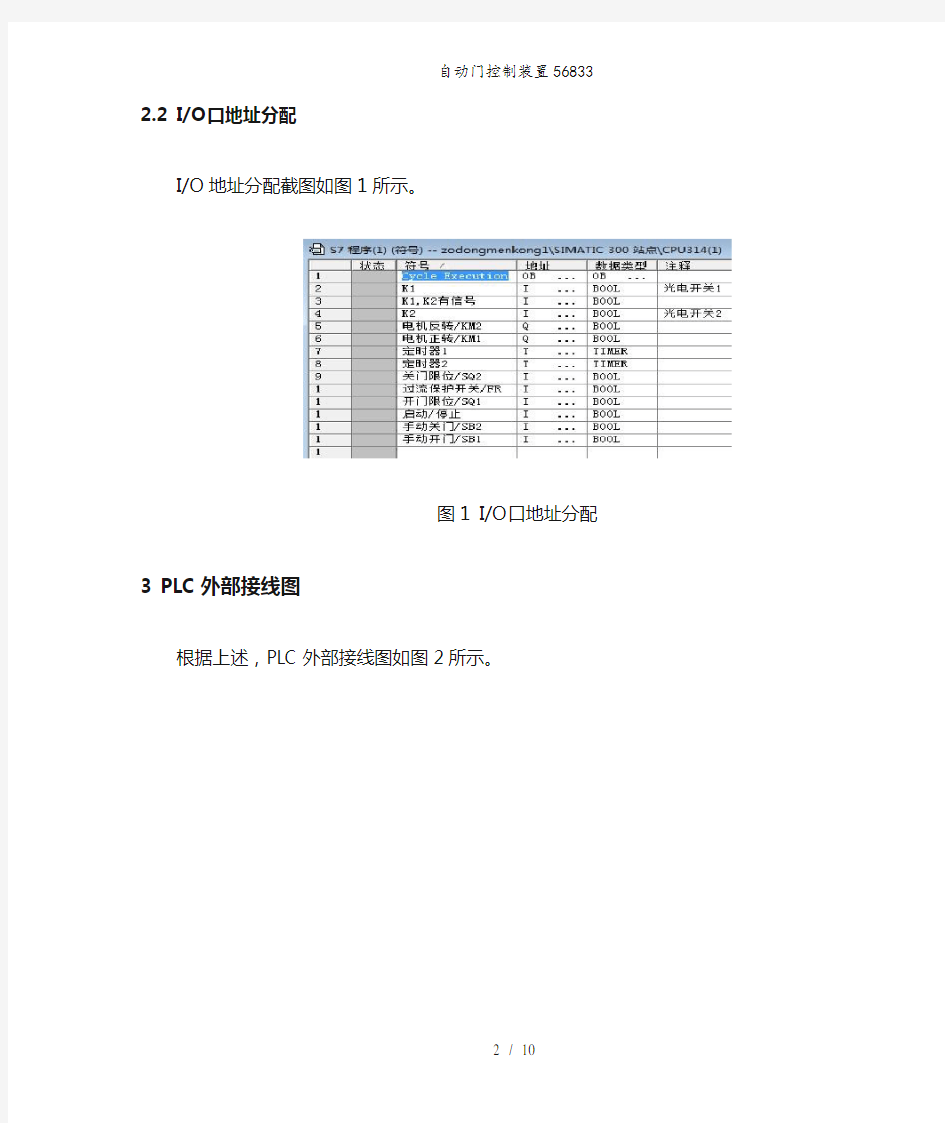
本设计输入信号共有:启动、停止、门内检测光电开关K1、门外光电检测开关K2、行程开关SQ1(开门限位)、行程开关SQ2(关门限位)、手动开、手动关及热继电器FR。输出信号有两路:电机正转开门(KM1),电机反转关门(KM2)。其中输入均为数字量,所以,在硬件组态中,在4号配置位DI(数字量输入),5号配置为DO(数字量输出)。
2.2 I/O口地址分配
I/O地址分配截图如图1所示。
图1 I/O口地址分配
3 PLC外部接线图
根据上述,PLC外部接线图如图2所示。
Q4.0
Q4.1
I0.0
I0.1
I0.2
I0.4
I0.3I0.7
N M
S7-300PLC
SB1
SQ1
SQ2
K1K2
FR
KM1
KM2
24V
HL1
HL2
Q4.2
Q4.3
图2 PLC 外部接线图
4 主控制程序
在该设计中,控制程序主要在STEP7环境下用梯形图编写。包括硬件组态、流程图设计以及根据流程图的梯形图设计。
4.1 PLC 硬件组态
前三个槽位固定,1号电源槽,2号为CPU 槽,所选CPU 型号为CPU314,3号接口槽,在仿真时可不配置。详细硬件组态信息如下图3所示。
图3 硬件组态
4.2 程序流程图
流程图整体构架如下图4所示。
开始
开门
K3开,开门限位
8s 延时。K1,K2有信号?
关门
K1,K2有信号?
K4开,关门限位
结束
否
是
是
否K1,K2有信号
图4 程序流程图
4.3 梯形图程序
为方便操作,将主控制程序直接写入组织块OB1中,以便不在其他块中调用,详细梯形图程序见附录。
5 系统运行调试以及在S7-PLCSIM 中的仿真
启动,K1,K2有信号,开门。
图5.1 传感器有信号,开门
开门到指定位置,SQ1作用,延时开始,8s 后关门。
图5.2 开门后延时
若延时过程中传感器再次获得信号,再启动另一个定时器,延时8s后关门。
图5.3 再延时功能
若传感器再无信号,延时完成后自动关门。
图5.4 延时完成后关门
6 设计体会
这次课程设计采用西蒙子STEP7环境下编程与外部PLC硬件结合使用,更加熟悉了STEP7环境的使用,组织块OB的作用,梯形图的写作方法,以及PLC硬件的外部接线,获益匪浅。
该设计程序满足了设计要求,但不足之处是实现控制条件比较简单,比如,在考虑关门时候突然转向开门过程,电动机就会突然经历由正转到反转的过程,忽略硬件机械性能的承受能力,就功能实现方面来说,要在很短时间内实现急停到反转,比较困难,要改进之处,便是正、反转各使用一台电机,达到良好控制效果。
通过该设计运用了所学的很多内容,如PLC控制原理,电器电路基本分析方法等等。并且更加熟悉了STEP7软件的使用以及PLC硬件的使用,作为自动化专业学生,在以后工作中会用到PLC控制,而这一次课程设计,虽然只是简单控制,但面对实践,已经奠定了相当基础。
附录
梯形图程序:
图1 程序段1
图2 程序段2
图3 程序段3
图4 程序段4
图5 程序段5
图6 程序段6
图7 程序段7