
机械设计基础习题集及参考答案
一、判断题(正确T,错误F)
1、构件就是机械中独立制造的单元。( )
2、能实现确定的相对运动,又能做有用功或完成能量形式转换的机械称为机器。( )
3、机构就是由构件组成的,构件就是机构中每个作整体相对运动的单元体。( )
4、所有构件一定都就是由两个以上零件组成的。( )
二、单项选择题
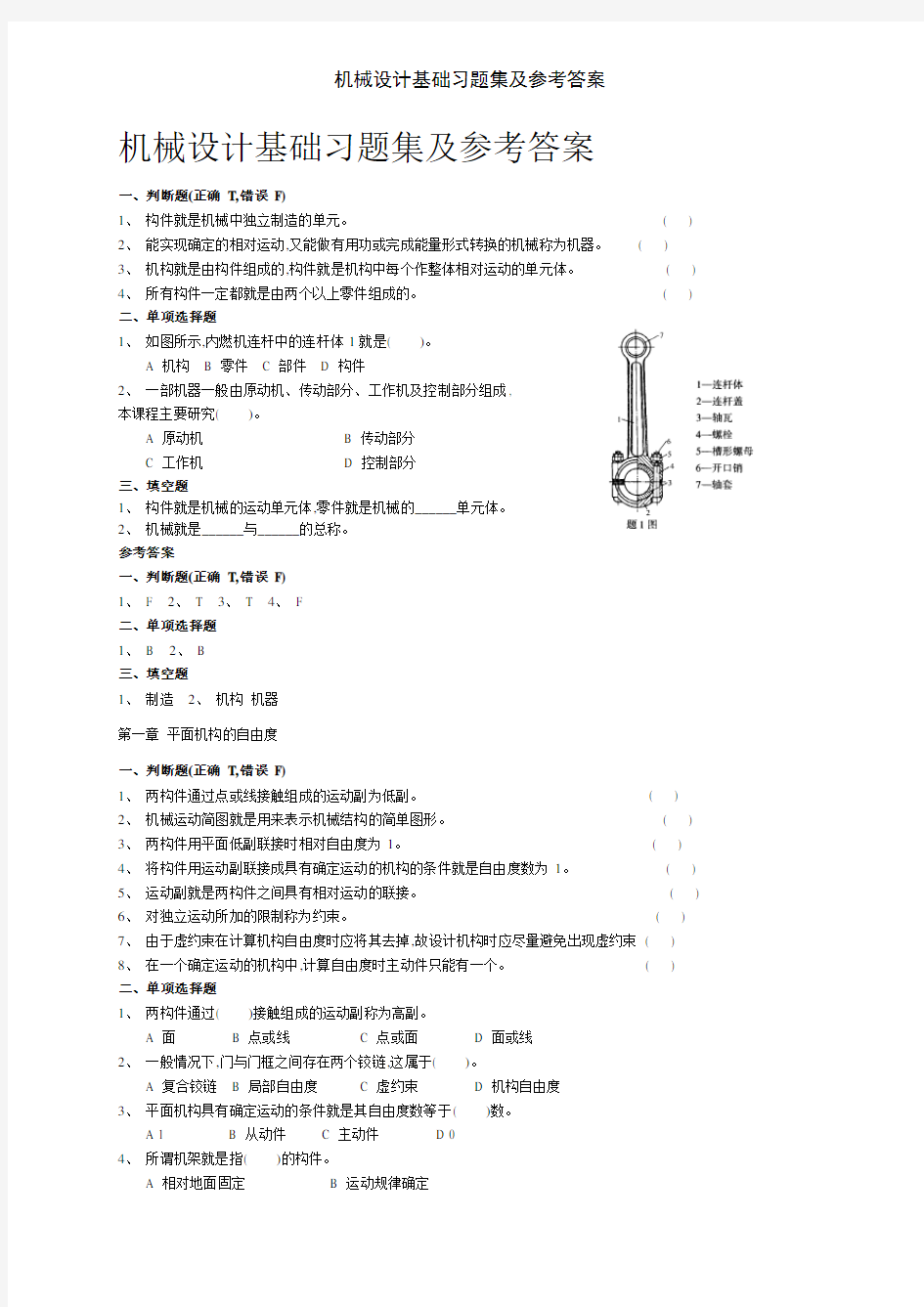
1、如图所示,内燃机连杆中的连杆体1就是( )。
A 机构
B 零件
C 部件
D 构件
2、一部机器一般由原动机、传动部分、工作机及控制部分组成,
本课程主要研究( )。
A 原动机
B 传动部分
C 工作机
D 控制部分
三、填空题
1、构件就是机械的运动单元体,零件就是机械的______单元体。
2、机械就是______与______的总称。
参考答案
一、判断题(正确T,错误F)
1、F
2、T
3、T
4、F
二、单项选择题
1、B
2、B
三、填空题
1、制造
2、机构机器
第一章平面机构的自由度
一、判断题(正确T,错误F)
1、两构件通过点或线接触组成的运动副为低副。( )
2、机械运动简图就是用来表示机械结构的简单图形。( )
3、两构件用平面低副联接时相对自由度为1。( )
4、将构件用运动副联接成具有确定运动的机构的条件就是自由度数为1。( )
5、运动副就是两构件之间具有相对运动的联接。( )
6、对独立运动所加的限制称为约束。( )
7、由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束( )
8、在一个确定运动的机构中,计算自由度时主动件只能有一个。( )
二、单项选择题
1、两构件通过( )接触组成的运动副称为高副。
A 面
B 点或线
C 点或面
D 面或线
2、一般情况下,门与门框之间存在两个铰链,这属于( )。
A 复合铰链
B 局部自由度
C 虚约束
D 机构自由度
3、平面机构具有确定运动的条件就是其自由度数等于( )数。
A 1
B 从动件
C 主动件
D 0
4、所谓机架就是指( )的构件。
A 相对地面固定
B 运动规律确定
C 绝对运动为零
D 作为描述其她构件运动的参考坐标点
5、两构件组成运动副必须具备的条件就是两构件( )。
A 相对转动或相对移动
B 都就是运动副
C 相对运动恒定不变
D 直接接触且保持一定的相对运动
三、填空题
1、机构就是由若干构件以_______________相联接,并具有__________________________的组合体。
2、两构件通过______或______接触组成的运动副为高副。
3、m个构件组成同轴复合铰链时具有______个回转副。
四、简答题
1、何为平面机构?
2、试述复合铰链、局部自由度与虚约束的含义?为什么在实际机构中局部自由度与虚约束常会出现?
3、计算平面机构自由度,并判断机构具有确定的运动。
(1) (2)
(3) (4)
(5) (6)
五、计算题
1、 计算机构自由度,若有复合铰链、局部自由度与虚约束,请加以说明。
2、 计算图示连杆机构的自由度,为保证该机构具有确定的运动,需要几个原动件?为什么?
参考答案
一、判断题(正确 T,错误 F)
1、 F
2、 F
3、 T
4、 F
5、 F
6、 T
7、 F
8、 F 二、单项选择题
1、 B
2、 C
3、 C
4、 D
5、 D 三、填空题
1、 运动副 确定相对运动
2、 点 线
3、 m -1 四、简答题
1、 平面机构:组成机构的所有构件都在同一平面内或几个互相平行的平面内运动,这种机构称为平面机构。
2、 复合铰链:两个以上的构件同时在一处用回转副相联接时就构成了复合铰链。
局部自由度:在机构中,有些构件所产生的运动并不影响其她构件的运动,这种构件运动的自由度称为局部自由度。 虚约束:在运动副引入的约束中,有些约束对机构自由度的影响就是重复的,对机构的运动不起限制作用,这种重复的约束称为虚约束。
局部自由度的使用就是为了减小高副磨损而将滑动摩擦变成滚动摩擦。
虚约束的引入可以增加构件的刚性,改善构件的受力情况,提高工作性能,提高稳定性等。 3、 计算平面机构自由度 (1)075===h l P ,P ,n ,则10725323=-?-?=--=h l P P n F ,机构具有确定的运动。 (2)186===h l P ,P ,n ,则11826323=-?-?=--=h l P P n F ,机构具有确定的运动。 (3)244===h l P ,P ,n
,则22424323=-?-?=--=h l P P n F ,机构具有确定的运动。
(4)075===h l P ,P ,n ,则10725323=-?-?=--=h l P P n F ,机构具有确定的运动。
(5)244===h l P ,P ,n ,则22424323=-?-?=--=h l P P n F ,机构具有确定的运动。 (6)233===h l P ,P ,n
,则12323323=-?-?=--=h l P P n F ,机构具有确定的运动。
五、计算题
1、 解:B 处为局部自由度,C 与C /处为虚约束,G 处为复合铰链。
197===h l P ,P ,n ,则21927323=-?-?=--=h l P P n F
2、 解:机构在k 点处有局部自由度。
1129===h l P ,P ,n ,则211229323=-?-?=--=h l P P n F 。若该机构要具有确定的运动,则需
要两个原动件,因为机构具有确定运动的条件为:机构的自由度数等于机构原动件的数目,该机构的自由度为2,所以应具有两个原动件。
H
第二章 平面连杆机构 一、判断题(正确 T,错误 F)
1、 任何平面四杆机构出现死点时对工作都就是不利的,因此应设法避免。 ( )
2、 铰链四杆机构存在曲柄的条件就是最短杆与最长杆之与大于或等于其余两杆长度之与。( )
3、 低副联接的三个构件不能组成机构,只能构成一个构件。 ( )
4、 机构处于死点位置时,机构中的从动件将出现自锁或运动不确定现象。 ( )
5、 极位夹角就是从动件在两个极限位置时的夹角。 ( )
6、 在铰链四杆机构中,通过取不同构件作为机架,则可以分别得到曲柄摇杆机构、双曲柄机构与双摇杆机构。
( )
7、 平面四杆机构中,压力角越小,传动角越大,机构的传动性能越好,效率越高。 ( ) 二、单项选择题