RS-485串行总线接口标准以差分平衡方式传输信号,具有很强的抗共模干扰的能力,允许一对双绞线上一个发送器驱动多个负载设备。工业现场控制系统中一般都采用该总线标准进行数据传输,而且一般采用RS-485串行总线接口标准的系统都使用8044芯片作为通信控制器或各分机的CPU。8044芯片内部集成了SDLC,HDLC等通信协议,并且集成了相应的硬件电路,通过硬件电路和标准协议的配合,使系统的通讯准确、可靠、快速。8044在市场上日渐稀少,虽然有8344可替代,但几百元的价位与普通单片机几元至几十元的价位相差甚远,用户在开发一般的单片机应用系统时,都希望能用简单的电路和简单的通信协议完成数据交换。譬如:利用单片机本身所提供的简单串行接口,加上总线驱动器如SN75176等组合成简单的RS-485通讯网络。本文所述的方法已成功地应用于工程项目,一台主机与60台从机通讯,通讯波特率达64KBPS。
2总线驱动器芯片SN75176
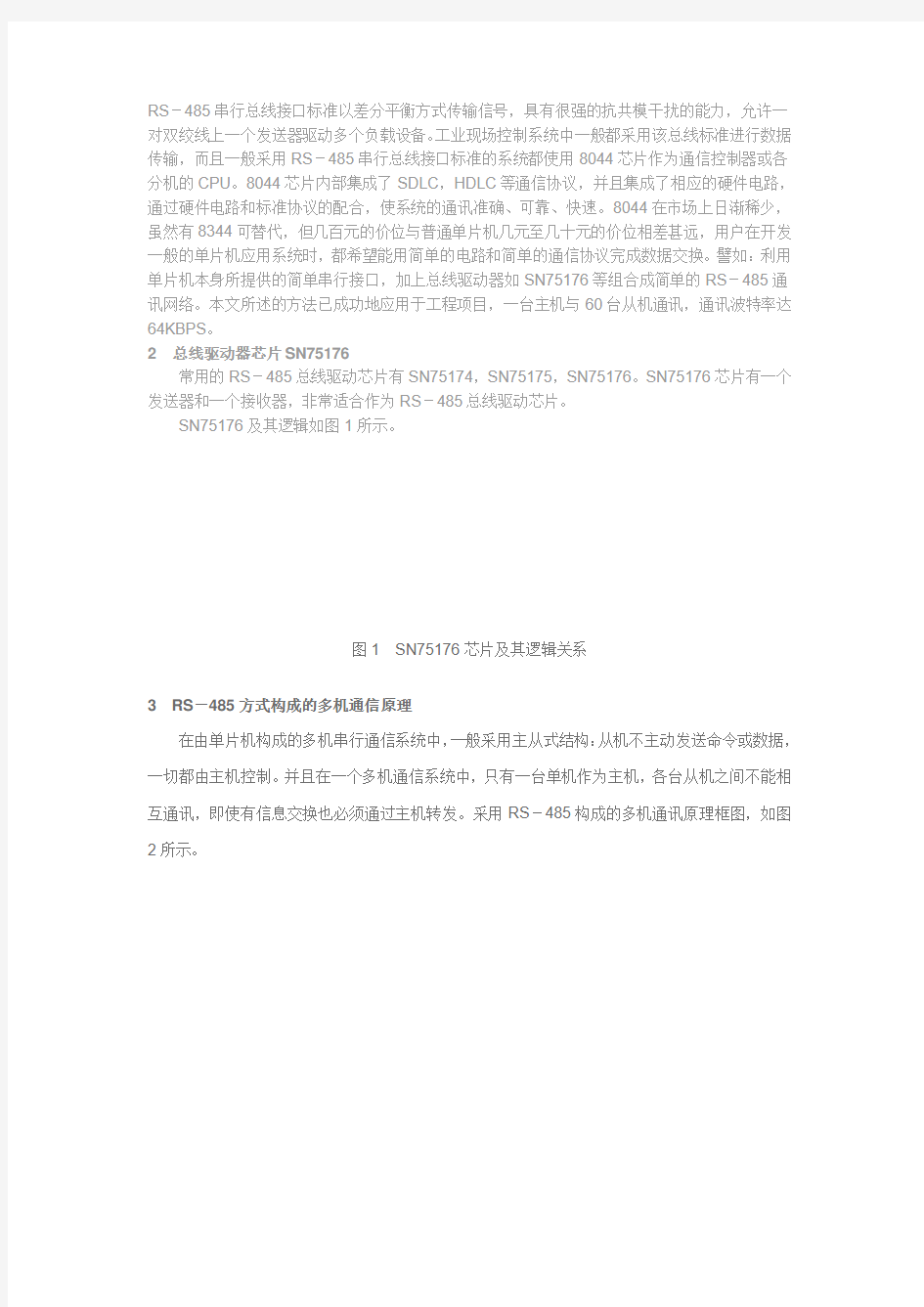
常用的RS-485总线驱动芯片有SN75174,SN75175,SN75176。SN75176芯片有一个发送器和一个接收器,非常适合作为RS-485总线驱动芯片。
SN75176及其逻辑如图1所示。
图1SN75176芯片及其逻辑关系
3RS-485方式构成的多机通信原理
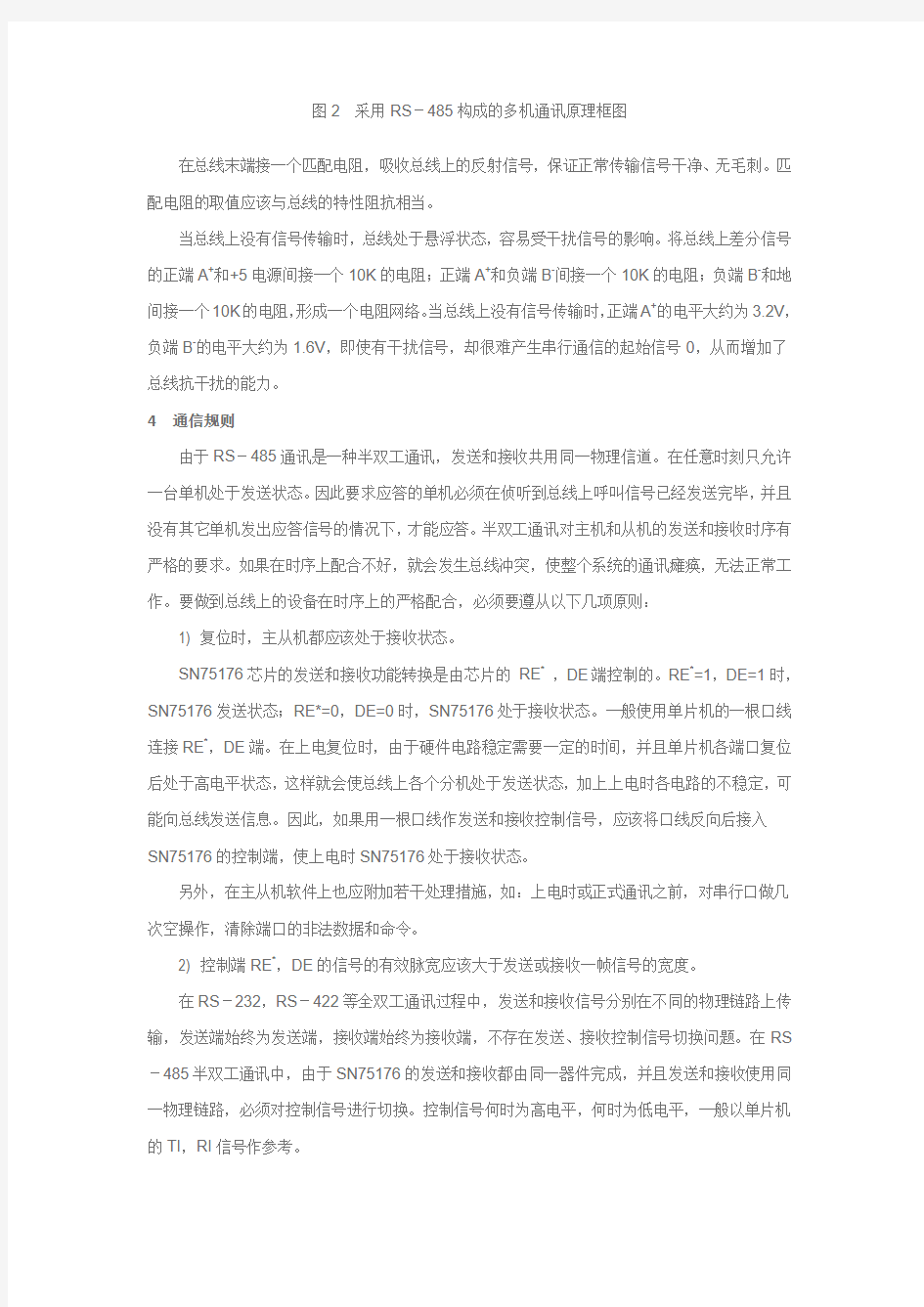
在由单片机构成的多机串行通信系统中,一般采用主从式结构:从机不主动发送命令或数据,一切都由主机控制。并且在一个多机通信系统中,只有一台单机作为主机,各台从机之间不能相互通讯,即使有信息交换也必须通过主机转发。采用RS-485构成的多机通讯原理框图,如图2所示。
图2采用RS-485构成的多机通讯原理框图
在总线末端接一个匹配电阻,吸收总线上的反射信号,保证正常传输信号干净、无毛刺。匹配电阻的取值应该与总线的特性阻抗相当。
当总线上没有信号传输时,总线处于悬浮状态,容易受干扰信号的影响。将总线上差分信号的正端A+和+5电源间接一个10K的电阻;正端A+和负端B-间接一个10K的电阻;负端B-和地间接一个10K的电阻,形成一个电阻网络。当总线上没有信号传输时,正端A+的电平大约为3.2V,负端B-的电平大约为1.6V,即使有干扰信号,却很难产生串行通信的起始信号0,从而增加了总线抗干扰的能力。
4通信规则
由于RS-485通讯是一种半双工通讯,发送和接收共用同一物理信道。在任意时刻只允许一台单机处于发送状态。因此要求应答的单机必须在侦听到总线上呼叫信号已经发送完毕,并且没有其它单机发出应答信号的情况下,才能应答。半双工通讯对主机和从机的发送和接收时序有严格的要求。如果在时序上配合不好,就会发生总线冲突,使整个系统的通讯瘫痪,无法正常工作。要做到总线上的设备在时序上的严格配合,必须要遵从以下几项原则:
1) 复位时,主从机都应该处于接收状态。
SN75176芯片的发送和接收功能转换是由芯片的RE*,DE端控制的。RE*=1,DE=1时,SN75176发送状态;RE*=0,DE=0时,SN75176处于接收状态。一般使用单片机的一根口线连接RE*,DE端。在上电复位时,由于硬件电路稳定需要一定的时间,并且单片机各端口复位后处于高电平状态,这样就会使总线上各个分机处于发送状态,加上上电时各电路的不稳定,可能向总线发送信息。因此,如果用一根口线作发送和接收控制信号,应该将口线反向后接入
SN75176的控制端,使上电时SN75176处于接收状态。
另外,在主从机软件上也应附加若干处理措施,如:上电时或正式通讯之前,对串行口做几次空操作,清除端口的非法数据和命令。
2) 控制端RE*,DE的信号的有效脉宽应该大于发送或接收一帧信号的宽度。
在RS-232,RS-422等全双工通讯过程中,发送和接收信号分别在不同的物理链路上传输,发送端始终为发送端,接收端始终为接收端,不存在发送、接收控制信号切换问题。在RS -485半双工通讯中,由于SN75176的发送和接收都由同一器件完成,并且发送和接收使用同一物理链路,必须对控制信号进行切换。控制信号何时为高电平,何时为低电平,一般以单片机的TI,RI信号作参考。
发送时,检测TI是否建立起来,当TI为高电平后关闭发送功能转为接收功能;
接收时,检测RI是否建立起来,当RI为高电平后,接收完毕,又可以转为发送。
在理论上虽然行得通,但在实际联调中却出现传输数据时对时错的现象。根据查证有关资料,并在联调中借助存储示波器反复测试,才发现一个值得注意的问题,我们可以查看单片机的时序:
图3串行口模式3时序图
单片机在串行口发送数据时,只要将8位数据位传送完毕,TI标志即建立,但此时应发送的第九位数据位(若发送地址帧时)和停止位尚未发出。如果在这是关闭发送控制,势必造成发送帧数据不完整。如果单片机多机通讯采用较高的波特率,几条操作指令的延时就可能超过2
位(或1位)数据的发送时间,问题或许不会出现。但是如果采用较低波特率,如9600,发送一位数据需100μs左右,单靠几条操作指令的延时远远不够,问题就明显地暴露出来。接收数据时也同样如此,单片机在接收完8个数据位后就建立起RI信号,但此时还未接收到第九位数据位(若接收地址帧时)和停止位。所以,接收端必须延时大于2位数据位的时间(1位数据位时间=1/波特率),再作应答,否则会发生总线冲突。
3) 总线上所连接的各单机的发送控制信号在时序上完全隔开。
为了保证发送和接收信号的完整和正确,避免总线上信号的碰撞,对总线的使用权必须进行分配才能避免竞争,连接到总线上的单机,其发送控制信号在时间上要完全隔离。
总之,发送和接收控制信号应该足够宽,以保证完整地接收一帧数据,任意两个单机的发送控制信号在时间上完全分开,避免总线争端。
程序流程框图,参见图4。其中:a)为发送流程图;b)为接收流程图。
RS-485协议简介及MAX485芯片介绍
由于RS-232的种种缺点,新的串行通讯接口标准RS-449被制定出来,与之相对应的是RS-485的电气标准。RS-485是美国电气工业联合会(EIA)制定的利用平衡双绞线作传输线的多点通讯标准。它采用差分信号进行传输;最大传输距离可以达到1.2 km;最大可连接32个驱动器和收发器;接收器最小灵敏度可达±200 mV;最大传输速率可达2.5 Mb/s。由此可见,RS-485协议正是针对远距离、高灵敏度、多点通讯制定的标准。
MAX485接口芯片是Maxim公司的一种RS-485芯片。
采用单一电源+5 V工作,额定电流为300 μA,采用半双工通讯方式。它完成将TTL电平转换为RS -485电平的功能。其引脚结构图如图1所示。从图中可以看出,MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只需分别与单片机的RXD和TXD相连即可;/RE和DE端分别为接收和发送的使能端,当/RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,因为MAX485工作在半双工状态,所以只需用单片机的一个管脚控制这两个引脚即可;A端和B端分别为接收和发送的差分信号端,当A引脚的电平高于B时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0。在与单片机连接时接线非
常简单。只需要一个信号控制MAX485的接收和发送即可。同时将A和B端之间加匹配电阻,一般可选100Ω的电阻。
2用PC机实现与8031单片机的多点通讯
用8031单片机实现与PC机之间的通讯时,必须使用电平转换接口芯片,因为单片机输出的是TTL电平,必须经过电平转换才能和PC机的一致。本文中采用的是RS-485协议,所以单片机需要采用RS-485接口;而在PC机侧使用的是RS-232与RS-485的电平转换接口。在本文中采用的是武汉新特电子公司的电平转换接口,该接口使用简便、无需外加电源、数据传输速率最高可达10 Mb/s,而且不用任何软件初始化和修改。另外实现多点通讯还需要了解器件的驱动能力,当器件的驱动能力足够大时,我们就可以根据需要加入所需要的节点。
本文中所举的例子就是利用一台PC控制64块单片机的工作,采用多点通讯形式。通过发送控制字和工作方式字给相应的单片机,使其进行相应的操作。单片机在接收到数据后,进行数据的采集工作,等到PC机再发指令,将采集到的数据反馈给PC机,PC机对数据进行分析和计算。
PC机的程序可以采用Windows下任何一种面向对象的高级语言来编写,它比在DOS下的利用串口中断的方式进行更加简便,应用程序将控制权交向串口的驱动程序,接收和发送的中断完全由串口驱动程序来控制,减轻了编写过程中的很多麻烦。本程序中选用的是Delphi的串口通讯控件Spcomm来实现。参数的设置可以自动完成。单片机采用中断工作方式,用汇编语言编写,通讯波特率为1 2 kb/s,由于要和PC机进行通讯,选用11 0592 MHz的晶振,保证和PC机的波特率完全一致,避免由于波特率不同引起的收发错误。为了配合多机工作方式,选用工作方式3。单片机的通讯流程图如图3所示。
下面给出用Delphi编制的通讯程序和单片机的接收和发送程序。
单片机初始化子程序:
单片机接收子程序:
REPT:CLRRI
MOVA,SBUF
MOV@R0,A
RET
在程序编写过程中,为了保证接收和发送数据的正确性,我们加入了CRC校验程序,另外PC机发送给单片机的是ASCII码形式的数据,同样需要经过简单的变换,在此均作了省略。利用RS-485协议进行串行通讯,可以保证快速、稳定远距离地传输数据。在目前以及以后的工业控制和其他方面必将得到越来越多的应用。
RS485应用电路图 最近在应用RS485,在网络上看见一篇好文章,转载与大家分享: --------以上部分请勿修改!------------- 提高485总线的可靠性 摘 要:就485总线应用中易出现的问题,分析了产生的原因并给出解决问题的软硬件方案 和措施。 关键词:RS-485总线、串行异步通信 -------------------------------------------------------------------------------- 1 问题的提出 在应用系统中,RS-485半双工异步通信总线是被各个研发机构广泛使用的数据通信总 线,它往往应用在集中控制枢纽与分散控制单元之间。系统简图如图1所示。 图1. RS-485系统示意图 由于实际应用系统中,往往分散控制单元数量较多,分布较远,现场存在各种干扰,所
以通信的可靠性不高,再加上软硬件设计的不完善,使得实际工程应用中如何保障RS-485总 线的通信的可靠性成为各研发机构的一块心病。 在使用RS-485总线时,如果简单地按常规方式设计电路,在实际工程中可能有以下两个问 题出现。一是通信数据收发的可靠性问题;二是在多机通信方式下,一个节点的故障(如死 机),往往会使得整个系统的通信框架崩溃,而且给故障的排查带来困难。 针对上述问题,我们对485总线的软硬件采取了具体的改进措施 2 硬件电路的设计 现以8031单片机自带的异步通信口,外接75176芯片转换成485总线为例。其中为了实现 总线与单片机系统的隔离,在8031的异步通信口与75176之间采用光耦隔离。电路原理图如 图2所示。 图 2 改进后的485通信口原理图 充分考虑现场的复杂环境,在电路设计中注意了以下三个问题。 2.1 SN75176 485芯片DE控制端的设计 由于应用系统中,主机与分机相隔较远,通信线路的总长度往往超过400米,而分机系 统上电或复位又常常不在同一个时刻完成。如果在此时某个75176的DE端电位为“1”,那 么它的485总线输出将会处于发送状态,也就是占用了通信总线,这样其它的分机就无法与 主机进行通信。这种情况尤其表现在某个分机出现异常情况下(死机),会使整个系统通信 崩溃。因此在电路设计时,应保证系统上电复位时75176的DE端电位为“0”。由于8031在复 位期间,I/O口输出高电平,故图2电路的接法有效地解决复位期间分机“咬”总线的问题。 2.2 隔离光耦电路的参数选取 在应用系统中,由于要对现场情况进行实时监控及响应,通信数据的波特率往往做得较 高(通常都在4800波特以上)。限制通信波特率提高的“瓶颈”,并不是现场的导线(现场 施工一般使用5类非屏蔽的双绞线),而是在与单片机系统进行信号隔离的光耦电路上。此 处采用TIL117。电路设计中可以考虑采用高速光耦,如6N137、6N136等芯片,也可以优化普 通光耦电路参数的设计,使之能工作在最佳状态。例如:电阻R2、R3如果选取得较大,将会
芯片选型 微控制器是移动机器人运动控制系统的核心,它的选择直接决定了整个机器人运动系统的性能和开发方式。目前,国内外移动机器人平台采用的微控制器有多种,主要有8/16位单片机和数字信号处理器DSP两大类型。采用8/16位单片机,控制系统设计制作简单,硬件开发周期短,但数据处理能力不强,需要借助外加器件如计数器、PID调节器和PWM产生器等,系统的稳定性不是很强,系统控制板的结构尺寸也比较大。DSP具有数据处理能力强、速度快等特点,且体积比较小,有利于电路板布局,但DSP在中断处理、位处理或逻辑操作方面不如单片机,资料相对较少,芯片价格和相应的开发套件比较昂贵,专用性比较强,通用性比较弱。 与DSP具有同等性能的ARM微处理器资源丰富,具有很强的通用性,以其高速度、高性能低价格、低功耗等优点而广泛应用于各个领域。ARM本身是32位处理器,但是集成了16位的Thumb指令集,这使得ARM可以代替16位的处理器使用,同时具有32位处理器的速度,用单片机和DSP实现的系统,ARM都可以实现。ARM还集成了丰富的片内外设资源,利用自身资源不必增加外围器件就可以实现控制所要求的功能,同时使得机器人控制板的结构尺寸可以做的很小。另外,利用ARM处理器设计的嵌入式系统还具有非常好的移植性,这是其他处理器所不具备的特点。考虑到这些因素,本课题决定选择以ARM为核心的微处理器作为机器人底层运动控制芯片。 然而,ARM微处理器有几十种架构,几十个芯片生产厂家以及各种各样的内部功能配置,因此开发时需要对芯片做一些对比分析,芯片选型时主要考虑以下几个因素: 1.ARM微处理器内核的选择 不同的内核,适用于不同的应用领域。如ARM7内核没有MMU,而ARM9内核有MMU。由于uCLinux等不需要MMU单位,因而可以在ARM7上运行,相反,嵌入式Linux具有MMU,因而可以在ARM9上运行。 2.系统的工作频率 系统的工作频率很大程度上决定了系统处理任务的能力。但是系统的工作频率越高,其功耗也较高。因此在实际应用中,需要根据需要来选择工作频率。 3.芯片内存储器的容量 多数的ARM微处理器片内存储器的容量不大,因而需要用户在设计系统时进行外部扩展,但是也有芯片内部有较大的片内存储空间。因而,用户可以根据需要选择合适的方案。 4.片内外围电路的支持 几乎所有的芯片都有各自不同的适用领域,扩展了相应的外围模块功能,并集成在芯片内部,称之为片内外围电路。开发人员根据系统设计的需要,选择合适的ARM外围电路,可以大大地降低开发成本,节约开发时间。
竭诚为您提供优质文档/双击可除 rs485总线通讯协议 篇一:Rs485通讯协议说明 摘要:阐述了Rs-485总线规范,描述了影响Rs-485总线通信速率和通信可靠性的三个因素,同时提出了相应的解决方法并讨论了总线负载能力和传输距离之间的具体关系。 关键词:Rs-485现场总线信号衰减信号反射 当前自动控制系统中常用的网络,如现场总线can、profibus、inteRbus-s以及aRcnet的物理层都是基于 Rs-485的总线进行总结和研究。 一、eiaRs-485标准 在自动化领域,随着分布式控制系统的发展,迫切需要一种总线能适合远距离的数字通信。在Rs-422标准的基础上,eia研究出了一种支持多节点、远距离和接收高灵敏度的Rs-485总线标准。 Rs-485标准采有用平衡式发送,差分式接收的数据收发器来驱动总线,具体规格要求: 接收器的输入电阻Rin≥12kΩ 驱动器能输出±7V的共模电压
输入端的电容≤50pF 在节点数为32个,配置了120Ω的终端电阻的情况下,驱动器至少还能输出电压1.5V(终端电阻的大小与所用双绞线的参数有关) 接收器的输入灵敏度为200mV(即(V+)-(V-)≥0.2V,表示信号“0”;(V+)-(V-)≤-0.2V,表示信号“1”)因为Rs-485的远距离、多节点(32个)以及传输线成本低的特性,使得eiaRs-485成为工业应用中数据传输的首选标准。 二、影响Rs-485总线通讯速度和通信可靠性的三个因素 1、在通信电缆中的信号反射 在通信过程中,有两种信号因导致信号反射:阻抗不连续和阻抗不匹配。 阻抗不连续,信号在传输线末端突然遇到电缆阻抗很小甚至没有,信号在这个地方就会引起反射,如图1所示。这种信号反射的原理,与光从一种媒质进入另一种媒质要引起反射是相似的。消除这种反射的方法,就必须在电缆的末端跨接一个与电缆的特性阻抗同样大小的终端电阻,使电缆的阻抗连续。由于信号在电缆上的传输是双向的,因此,在通讯电缆的另一端可跨接一个同样大小的终端电阻,如图2所示。
什么是RS485通信接口 通信概述 通信设备从早期的邮件,电报,电话,传真,传呼机,手机,电脑,一路发展下来,而且随着科技的发展,世界必将由一个网络组成,所以,在未来开发的设备中,也必然要求大部分的设备都带有通信的功能。 设备与设备之间互相通信,就要有一座桥梁把二者连接起来,那就是传输通路与通信协议。传输通路由传输介质与传输接口组成,传输介质可分为有线和无线传输介质两大类。 有线传输介质在数据传输中只作为传输介质,而非信号载体。计算机网络中流行使用的有线传输介质为:铜线和玻璃纤维。 铜线具有便宜,安装容易的特点,在现在工业应用中普遍应用,在应用中主要有两种基本的铜线类型:双绞线和同轴电缆。双绞线可减小流过电流所辐射的能量,也可防止来自其他通信线路上信号的干扰,对于一些要求比较高的项目上,还需要给双绞线加上屏蔽层;同轴电缆由一对同轴导线组成。同轴电缆频带宽,损耗小,具有比双绞线更强的抗干扰能力和更好的传输性能。按阻抗值不同,同轴电缆可分为基带和宽带两种,同轴电缆是目前局域网与有线电视网中普遍采用的比较理想的传输介质。 所谓玻璃纤维介质,就是指现在所流行的光纤传输,他的两边有一个激光发生器与一个激光接收器,组成一整套通信线路,由于光纤传输距离远,因此现很多在工程都是采用“光端机+光纤”的模式。 结合我在工程中经常应用的通信模式,与“南方的老树51CPLD开发板”上具有的RS232通信、RS485通信两种,详细讲解下这两种通信方式的应用。 什么是RS232接口 首先介绍下什么是RS232接口,什么是RS485接口。
RS232接口是1970年由美国电子工业协会(EIA)联合贝尔系统、调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。它的全名是“数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准”该标准规定采用一个25个脚的DB25连接器,对连接器的每个引脚的信号内容加以规定,还对各种信号的电平加以规定。DB25的串口一般只用到的管脚只有2(RXD)、3(TXD)、7(GND)这三个,随着设备的不断改进,现在DB25针很少看到了,代替他的是DB9的接口,DB9所用到的管脚比DB25有所变化,是2(RXD)、3(TXD)、5(GND)这三个。因此现在都把RS232接口叫做DB9。 元器件常识:市场上把公头的接插件叫做DRXX,母头的叫DBXX,比如我们电脑上的串口,在市场上叫做DR9,不是DB9,很多人都误叫做DB9,实际上的DB9是两个把两个DR9互相连接在一起的接口。 在文章中,我把所有的串口设备接口都统一叫做RS232接口。 三、什么是RS485接口 由于RS232接口标准出现较早,难免有不足之处,主要有以下四点: (1)接口的信号电平值较高,易损坏接口电路的芯片,又因为与TTL 电平不兼容故需使用电平转换电路方能与TTL电路连接。 (2)传输速率较低,在异步传输时,波特率为20Kbps;因此在“南方的老树51CPLD开发板”中,综合程序波特率只能采用19200,也是这个原因。 (3)接口使用一根信号线和一根信号返回线而构成共地的传输形式,这种共地传输容易产生共模干扰,所以抗噪声干扰性弱。 (4)传输距离有限,最大传输距离标准值为50英尺,实际上也只能用在50米左右。 针对RS232接口的不足,于是就不断出现了一些新的接口标准,RS-485就是其中之一,它具有以下特点:
RS-485协议简介及MAX485芯片介绍 1 RS-485协议简介及MAX485芯片介绍 由于RS-232的种种缺点,新的串行通讯接口标准RS-449被制定出来,与之相对应的是RS-485的电气标准。RS -485是美国电气工业联合会(EIA)制定的利用平衡双绞线作传输线的多点通讯标准。它采用差分信号进行传输;最大传输距离可以达到1.2 km;最大可连接32个驱动器和收发器;接收器最小灵敏度可达±200 mV;最大传输速率可达2.5 Mb /s。由此可见,RS-485协议正是针对远距离、高灵敏度、多点通讯制定的标准。 MAX485接口芯片是Maxim公司的一种RS-485芯片。 采用单一电源+5 V工作,额定电流为300 μA,采用半双工通讯方式。它完成将TTL电平转换为RS-485电平的功能。其引脚结构图如图1所示。从图中可以看出,MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只需分别与单片机的RXD和TXD相连即可;/RE和DE端分别为接收和发送的使能端,当/RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,因为MAX 485工作在半双工状态,所以只需用单片机的一个管脚控制这两个引脚即可;A端和B端分别为接收和发送的差分信号端,当A引脚的电平高于B时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0。在与单片机连接时接线非常简单。只需要一个信号控制MAX485的接收和发送即可。同时将A和B端之间加匹配电阻,一般可选100Ω的电阻。 2用PC机实现与8031单片机的多点通讯 用8031单片机实现与PC机之间的通讯时,必须使用电平转换接口芯片,因为单片机输出的是TTL电平,必须经过电平转换才能和PC机的一致。本文中采用的是RS-485协议,所以单片机需要采用RS-485接口;而在PC机侧使用的是RS-232与RS-485的电平转换接口。在本文中采用的是武汉新特电子公司的电平转换接口,该接口使用简便、无需外加电源、数据传输速率最高可达10 Mb/s,而且不用任何软件初始化和修改。另外实现多点通讯还需要了解器件的驱动能力,当器件的驱动能力足够大时,我们就可以根据需要加入所需要的节点。 本文中所举的例子就是利用一台PC控制64块单片机的工作,采用多点通讯形式。通过发送控制字和工作方式字给相应的单片机,使其进行相应的操作。单片机在接收到数据后,进行数据的采集工作,等到PC机再发指令,将采集到的数据反馈给PC机,PC机对数据进行分析和计算。 PC机的程序可以采用Windows下任何一种面向对象的高级语言来编写,它比在DOS下的利用串口中断的方式进行更加简便,应用程序将控制权交向串口的驱动程序,接收和发送的中断完全由串口驱动程序来控制,减轻了编写过程中的很多麻烦。本程序中选用的是Delphi的串口通讯控件Spcomm来实现。参数的设置可以自动完成。单片机采用中断工作
RS485主从式多机通讯协议 一、数据传输协议 此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。它描述了一控制器请求访问其它设备的过程,如何回应来自其它设备的请求,以及怎样侦测错误并记录。它制定了消息域格局和内容的公共格式。 此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。如果需要回应,控制器将生成反馈信息按本协议发出。 1、数据在网络上转输 控制器通信使用主—从技术,即仅一设备(主设备)能初始化传输(查询)。其它设备(从设备)根据主设备查询提供的数据作出相应反应。 主设备可单独和从设备通信,也能以广播方式和所有从设备通信。如果单独通信,从设备返回一消息作为回应,如果是以广播方式查询的,则从设备不作任何回应。协议建立了主设备查询的格式:设备(或广播)地址、功能代码、所有要发送的数据、一错误检测域。 从设备回应消息也由协议构成,包括确认要行动的域、任何要返回的数据、和一错误检测域。如果在消息接收过程中发生一错误(无相应的功能码),或从设备不能执行其命令,从设备将建立一错误消息并把它作为回应发送出去。 2、在对等类型网络上转输 在对等网络上,控制器使用对等技术通信,故任何控制都能初始和其它控制器的通信。这样在单独的通信过程中,控制器既可作为主设备也可作为从设备。 在消息位,本协议仍提供了主—从原则,尽管网络通信方法是“对等”。如果一控制器发送一消息,它只是作为主设备,并期望从设备得到回应。同样,当控制器接收到一消息,它将建立一从设备回应格式并返回给发送的控制器。 3、查询—回应周期 (1)查询 查询消息中的功能代码告之被选中的从设备要执行何种功能。数据段包含了从设备要执行功能的任何附加信息。错误检测域为从设备提供了一种验证消息内容是否正确的方法。 (2)回应 如果从设备产生一正常的回应,在回应消息中的功能代码是在查询消息中的功能代码的回应。数据段包括了从设备收集的数据。如果有错误发生,功能代码将被修改以用于指出回应消息是错误的,同时数据段包含了描述此错误信息的代码。错误检测域允许主设备确认消息内容是否可用。 二、传输方式 控制器能设置传输模式为RS485串行传输,通信参数为9600,n,8,1。在配置每个控制器的时候,在一个网络上的所有设备都必须选择相同的串口参数。 地址功能代码数据数量数据1 ...….数据n CRC字节 每个字节的位 · 1个起始位 · 8个数据位,最小的有效位先发送 · 1个停止位 错误检测域 · CRC(循环冗余码校验) 三、消息帧
RS-485串行总线接口标准以差分平衡方式传输信号,具有很强的抗共模干扰的能力,允许一对双绞线上一个发送器驱动多个负载设备。工业现场控制系统中一般都采用该总线标准进行数据传输,而且一般采用RS-485串行总线接口标准的系统都使用8044芯片作为通信控制器或各分机的CPU。8044芯片内部集成了SDLC,HDLC等通信协议,并且集成了相应的硬件电路,通过硬件电路和标准协议的配合,使系统的通讯准确、可靠、快速。8044在市场上日渐稀少,虽然有8344可替代,但几百元的价位与普通单片机几元至几十元的价位相差甚远,用户在开发一般的单片机应用系统时,都希望能用简单的电路和简单的通信协议完成数据交换。譬如:利用单片机本身所提供的简单串行接口,加上总线驱动器如SN75176等组合成简单的RS-485通讯网络。本文所述的方法已成功地应用于工程项目,一台主机与60台从机通讯,通讯波特率达64KBPS。 2总线驱动器芯片SN75176 常用的RS-485总线驱动芯片有SN75174,SN75175,SN75176。SN75176芯片有一个发送器和一个接收器,非常适合作为RS-485总线驱动芯片。 SN75176及其逻辑如图1所示。 图1SN75176芯片及其逻辑关系 3RS-485方式构成的多机通信原理 在由单片机构成的多机串行通信系统中,一般采用主从式结构:从机不主动发送命令或数据,一切都由主机控制。并且在一个多机通信系统中,只有一台单机作为主机,各台从机之间不能相互通讯,即使有信息交换也必须通过主机转发。采用RS-485构成的多机通讯原理框图,如图2所示。
图2采用RS-485构成的多机通讯原理框图 在总线末端接一个匹配电阻,吸收总线上的反射信号,保证正常传输信号干净、无毛刺。匹配电阻的取值应该与总线的特性阻抗相当。 当总线上没有信号传输时,总线处于悬浮状态,容易受干扰信号的影响。将总线上差分信号的正端A+和+5电源间接一个10K的电阻;正端A+和负端B-间接一个10K的电阻;负端B-和地间接一个10K的电阻,形成一个电阻网络。当总线上没有信号传输时,正端A+的电平大约为3.2V,负端B-的电平大约为1.6V,即使有干扰信号,却很难产生串行通信的起始信号0,从而增加了总线抗干扰的能力。 4通信规则 由于RS-485通讯是一种半双工通讯,发送和接收共用同一物理信道。在任意时刻只允许一台单机处于发送状态。因此要求应答的单机必须在侦听到总线上呼叫信号已经发送完毕,并且没有其它单机发出应答信号的情况下,才能应答。半双工通讯对主机和从机的发送和接收时序有严格的要求。如果在时序上配合不好,就会发生总线冲突,使整个系统的通讯瘫痪,无法正常工作。要做到总线上的设备在时序上的严格配合,必须要遵从以下几项原则: 1) 复位时,主从机都应该处于接收状态。 SN75176芯片的发送和接收功能转换是由芯片的RE*,DE端控制的。RE*=1,DE=1时,SN75176发送状态;RE*=0,DE=0时,SN75176处于接收状态。一般使用单片机的一根口线连接RE*,DE端。在上电复位时,由于硬件电路稳定需要一定的时间,并且单片机各端口复位后处于高电平状态,这样就会使总线上各个分机处于发送状态,加上上电时各电路的不稳定,可能向总线发送信息。因此,如果用一根口线作发送和接收控制信号,应该将口线反向后接入 SN75176的控制端,使上电时SN75176处于接收状态。 另外,在主从机软件上也应附加若干处理措施,如:上电时或正式通讯之前,对串行口做几次空操作,清除端口的非法数据和命令。 2) 控制端RE*,DE的信号的有效脉宽应该大于发送或接收一帧信号的宽度。 在RS-232,RS-422等全双工通讯过程中,发送和接收信号分别在不同的物理链路上传输,发送端始终为发送端,接收端始终为接收端,不存在发送、接收控制信号切换问题。在RS -485半双工通讯中,由于SN75176的发送和接收都由同一器件完成,并且发送和接收使用同一物理链路,必须对控制信号进行切换。控制信号何时为高电平,何时为低电平,一般以单片机的TI,RI信号作参考。
以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述: 1、系统常识: 步进电机和步进电机驱动器构成步进电机驱动系统。步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。 2、系统概述: 步进电机是一种将电脉冲转化为角位移的执行元件。当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它 的旋转是以固定的角度一步一步运行的。 3、系统控制: 步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 4、用途: 步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。 5、步进电机按结构分类: 步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。 (1)反应式步进电机: 也叫感应式、磁滞式或磁阻式步进电机。其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。 (2)永磁式步进电机: 通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有一定的保持转矩;启动和运行频率较低。 (3)混合式步进电机: 也叫永磁反应式、永磁感应式步进电机,混合了永磁式和反应式的优点。其定子和四相反应式步进电机没有区别(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必须相同),转子结构较为复杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。一般为两相或四相;须供给正负脉冲信号;输出转矩较永磁式大(消耗功率相对较小);步距角较永磁式小(一般为1.8度);断电时无定位转矩;启动和运行频率较高;是目前发展较快的一种步进电机。 6、步进电机按工作方式分类:可分为功率式和伺服式两种。 (1)功率式:输出转矩较大,能直接带动较大负载(一般使用反应式、混合式步进电机)。(2)伺服式:输出转矩较小,只能带动较小负载(一般使用永磁式、混合式步进电机)。 7、步进电机的选择: (1)首先选择类型,其次是具体的品种与型号。
485通讯常见问题 1.MAX488/MAX490在点对点通信中工作很正常,为何在点对多点通信时无法正常通信? 由于MAX488/MAX490没有发送使能控制,因而其输出无法处于高阻态,当多个输出被连接在一起时(即点对多点通信时),差分输出信号线被多个发送器驱动(通常为TXD=1对应的电平状态);当某个节点开始通信,且发送TXD=0对应的差分电平时,A,B两线上将形成很大的短路电流,若长时间工作,则接口芯片将损坏;而这种情况不会在点对点通信中发生,且不会出现在点对多点通信中的处于点的一方,这也是象MAX488/MAX490以及其它一些没有发送使能控制的接口的适用范围。以上是造成这个问题的原因,当然,类似情况也会出现在那些带使能控制而软件没有编程控制使能的接口芯片中。 2.RS-485/RS-422接口为何在停止通信时接收器仍有数据输出? 由于RS-485/RS-422在发送数据完成后,要求所有的发送使能控制信号关闭且保持接收使能有效,此时,总线驱动器进入高阻状态且接收器能够监测总线上是否有新的通信数据。但是由于此时总线处于无源驱动状态(若总线有终端匹配电阻时,A和B线的差分电平为0,接收器的输出不确定,且对AB线上的差分信号的变化很敏感;若无终端匹配,则总线处于高阻态,接收器的输出不确定),容易受到外界的噪声干扰。当噪声电压超过输入信号门限时(典型值±200mV),接收器将输出数据,导致对应的UART接收无效的数据,使紧接着的正常通讯出错;另外一种情况可能发生在打开/关闭发送使能控制的瞬间,使接收器输出信号,也会导致UART错误地接收。 解决方法: 1)在通讯总线上采用同相输入端上拉(A线)、反相输入端下拉(B线)的方法对总线进行钳位,保证接收器输出为固定的“1”电平; 2)采用内置防故障模式的MAX308x系列的接口产品替换该接口电路; 3)通过软件方式消除,即在通信数据包内增加2-5个起始同步字节,只有在满足同步头后才开始真正的数据通讯。 3.采用RS-485/RS422接口通讯时,在什么条件下需要采用终端匹配?电阻值如何确定?如何配置终端匹配电阻?
串行数据通信的协议从RS-232到千兆位以太网,虽然每种协议都有特定的应用领域,但任何情况下我们都必须考虑成本和物理层(PHY)性能。 本文主要介绍RS-485协议及该协议所适合的应用。同时给出了根据电缆长度、系统设计以及元件选择来优化数据速率的方法。 传输协议 什么是RS-485?Profibus又是什么?与其它串行协议相比,它们的性能如何?适用于哪些应用?为了回答这些问题,我们对RS-485 物理层(PHY)、RS-232和RS-422的特性、功能进行了总体比较[1](本文中的RS表示ANSIEIA/TIA标准)。 RS-232是一个最初用于调制解调器、打印机及其它PC外设的通讯标准,提供单端20kbps的波特率,后来速率提高至1Mbps。RS-232的其它技术指标包括:标称±5V发送电平、±3V接收电平(间隔/符号)、2V共模抑制、2200pF最大电缆负载电容、300最大驱动器输出电阻、3k最小接收器(负载)阻抗、100英尺(典型值)最大电缆长度。RS-232只用于点对点通信系统,不能用于多点通信系统,所有RS-232系统都必须遵从这些限制。 RS-422是单向、全双工通信协议,适合嘈杂的工业环境。RS-422规范允许单个驱动器与多个接收器通信,数据信号采用差分传输方式,速率最高可达50Mbps。接收器共模范围为±7V,驱动器输出电阻最大值为100,接收器输入阻抗可低至4k。 RS-485标准 RS-485是双向、半双工通信协议,允许多个驱动器和接收器挂接在总线上,其中每个驱动器都能够脱离总线。该规范满足所有RS-422的要求,而且比RS-422稳定性更强。具有更高的接收器输入阻抗和更宽的共模范围(-7V至+12V)。 接收器输入灵敏度为±200mV,这就意味着若要识别符号或间隔状态,接收端电压必须高于+200mV或低于-200mV。最小接收器输入阻抗为12k,驱动器输出电压为±1.5V(最小值)、±5V(最大值)。 驱动器能够驱动32个单位负载,即允许总线上并联32个12k的接收器。对于输入阻抗更高的接收器,一条总线上允许连接的单位负载数也较高。RS-485接收器可随意组合,连接至同一总线,但要保证这些电路的实际并联阻抗不高于32个单位负载(375)。 采用典型的24AWG双绞线时,驱动器负载阻抗的最大值为54,即32个单位负载并联2个120终端匹配电阻。RS-485已经成为POS、工业以及电信应用中的最佳选择。较宽的共模范围可实现长电缆、嘈杂环境(如工厂车间)下的数据传输。更高的接收器输入阻抗还允许总线上挂接更多器件。
CCD芯片就像人的视网膜,是摄像头的核心。 目前市场上大部分摄像头采用的是日本SONY、SHARP、松下、LG等公司生产的芯片,现在国也有能力生产,但质量就要稍逊一筹。 因为芯片生产时产生不同等级,各厂家获得途径不同等原因,造成CCD采集效果也大不相同。在购买时,可以采取如下方法检测:接通电源,连接视频电缆到监视器,关闭镜头光圈,看图像全黑时是否有亮点,屏幕上雪花大不大,这些是检测CCD芯片最简单直接的方法,而且不需要其它专用仪器。然后可以打开光圈,看一个静物,如果是彩色摄像头,最好摄取一个色彩鲜艳的物体,查看监视器上的图像是否偏色,扭曲,色彩或灰度是否平滑。好的CCD可以很好的还原景物的色彩,使物体看起来清晰自然;而残次品的图像就会有偏色现象,即使面对一白纸,图像也会显示蓝色或红色。个别CCD由于生产车间的灰尘,CCD靶面上会有杂质,在一般情况下,杂质不会影响图像,但在弱光或显微摄像时,细小的灰尘也会造成不良的后果,如果用于此类工作,一定要仔细挑选。 第二章摄像机的主要技术参数 一、CCD尺寸 即摄象机靶面。目前采用的芯片大多数为1/3”和1/4”。 在购买摄像头时,特别是对摄像角度有比较严格要求的时
候,CCD靶面的大小,CCD与镜头的配合情况将直接影响视场角的大小和图像的清晰度。在相同的光学镜头下,成像尺寸越大,视场角越大。 1英寸——靶面尺寸为宽12.7mm*高9.6mm,对角线16mm。 2/3英寸——靶面尺寸为宽8.8mm*高6.6mm,对角线11mm。 1/2英寸——靶面尺寸为宽6.4mm *高4.8mm,对角线8mm。 1/3英寸——靶面尺寸为宽4.8mm *高3.6mm,对角线6mm。 1/4英寸——靶面尺寸为宽3.2mm *高2.4mm,对角线4mm。 二、CCD像素 是CCD的主要性能指标,它决定了显示图像的清晰程度,分辨率越高,图像细节的表现越好。CCD是由面阵感光元素组成,每一个元素称为像素,像素越多,图像越清晰。现在市场上大多以25万和38万像素为划界,38万像素以上者为高清晰度摄象机。 三、水平分辨率 分辨率是用电视线(简称线TV LINES)来表示的。彩色摄象机的典型分辨率是在320到500电视线之间,主要有330线、380线、420线、460线、500线等不同档次。 分辨率与CCD和镜头有关,还与摄像头电路通道的频带宽度直接相关,通常规律是1MHz的频带宽度相当于清晰度为80线。频带越宽,图像越清晰,线数值相对越大。
RS-485通信网络功能 一 RS485接口 RS485采用差分信号负逻辑,+2V~+6V表示“0”,- 6V~- 2V表示“1”。RS485有两线制和四线制两种接线,四线制只能实现点对点的通信方式,现很少采用,现在多采用的是两线制接线方式,这种接线方式为总线式拓朴结构在同一总线上最多可以挂接32个结点。 在RS485通信网络中一般采用的是主从通信方式,即一个主机带多个从机。很多情况下,连接RS-485通信链路时只是简单地用一对双绞线将各个接口的“A”、“B”端连接起来。而忽略了信号地的连接,这种连接方法在许多场合是能正常工作的,但却埋下了很大的隐患,这有二个原因:(1)共模干扰问题:RS-485接口采用差分方式传输信号方式,并不需要相对于某个参照点来检测信号,系统只需检测两线之间的电位差就可以了。但人们往往忽视了收发器有一定的共模电压范围,RS-485收发器共模电压范围为-7~+12V,只有满足上述条件,整个网络才能正常工作。当网络线路中共模电压超出此范围时就会影响通信的稳定可靠,甚至损坏接口。(2)EMI问题:发送驱动器输出信号中的共模部分需要一个返回通路,如没有一个低阻的返回通道(信号地),就会以辐射的形式返回源端,整个总线就会像一个巨大的天线向外辐射电磁波。 由于PC机默认的只带有RS232接口,有两种方法可以得到PC上位机的RS485电路:(1)通过RS232/RS485转换电路将PC机串口RS232信号转换成RS485信号,对于情况比较复杂的工业环境最好是选用防浪涌带隔离珊的产品。(2)通过PCI多串口卡,可以直接选用输出信号为RS485类型的扩展卡。 二RS485布网 网络拓扑一般采用终端匹配的总线型结构,不支持环形或星形网络。在构建网络时,应注意如下几点:(1)采用一条双绞线电缆作总线,将各个节点串接起来,从总线到每个节点的引出线长度应尽量短,以便使引出线中的反射信号对总线信号的影响最低。有些网络连接尽管不正确,在短距离、低速率仍可能正常工作,但随着通信距离的延长或通信速率的提高,其不良影响会越来越严重,主要原因是信号在各支路末端反射后与原信号叠加,会造成信号质量下降。(2)应注意总线特性阻抗的连续性,在阻抗不连续点就会发生信号的反射。下列几种情况易产生这种不连续性:总线的不同区段采用了不同电缆,或某一段总线上有过多收发器紧靠在一起安装,再者是过长的分支线引出到总线。总之,应该提供一条单一、连续的信号通道作为总线。在RS485组网过程中另一个需要注意的
变频器与上位机的通讯:浅述RS485通讯协议 引言:当上位机与变频器构成控制系统时,上位机和变频器可以通过特定的通讯协议实现数据交换,这样上位机就可以随时控制每一台变频器的工作状况,并及时做出响应。本文介绍一下一种常用的上位机和变频器通讯协议RS485通讯协议 1、概述 本文专门介绍一种变频器的RS485通讯接口,用户可通过PC/PLC实现集中监控(设定变频器参数和读取、控制变频器的工作状态),以适应特定的使用要求。 1.1协议内容 该串行通讯协议定义了串行通讯中传输的信息内容及使用格式。其中包括:主机轮询(或广播)格式:主机的编码方法,内容包括:要求动作的功能代码,传输数据和错误校验等。从机的响应也是采用相同的结构,内容包括:动作确认,返回数据和错误校验等。如果从机在接收信息时发生错误,或不能完成主机要求的动作,它将组织一个故障信息作为响应反馈给主机。 1.2应用方式: (1)变频器接入具备RS485总线的“单主多从”PC/PLC控制网。(2)变频器接入具备RS485/RS232(转换接口)的“点对点”方式的PC/PLC监控后台。 2、总线结构及协议说明 2.1总线结构
(1)接口方式 RS485(RS232可选,但需自备电平转换附件) (2) 传输方式 异步串行、半双工传输方式。在同一时刻主机和从机只能有一个发送数据,而另一个只能接收数据。数据在串行异步通讯过程中,是以报文的形式,一帧一帧发送。 (3)拓扑方式 单主站系统,最多32个站,其中一个站为主机、31个站为从机。从机地址设定范围为0~30,31(1FH)为广播通讯地址。网络中的从机地址必须是唯一的。点对点方式实际是作为单主多从拓扑方式的一个应用特例,即只有一个从机的情况。 2.2协议说明 此种变频器的通讯协议是一种串行的主从通讯协议,网络中只有一台设备(主机)能够建立协议(称为“查询/命令”)。其它设备(从机)只能通过提供数据响应主机的查询/命令,或根据主机的命令/查询做出响应的动作。主机在此处指个人计算机(PC)、工控机和可编程控制器(PLC)等,从机指的是变频器。主机既能对某个从机单独访问,又能对所有的从机发布广播消息。对于单独访问的主机查询/命令,从机都要返回一个信息(响应);对于单独访问的主机查询/命令,从机都要返回一个信息(称为响应);对于主机发出的广播信息,从机无需反馈响应给主机。 注意:和RS485通讯有关的参数的设定。
电机驱动有单极性和双极性两种。当只需要电机单方向驱动时,可采用单极性驱动,如下图(a)所示,此电路由于续流二极管工作时间较长,损耗大,所以改进后的半桥驱动如下图(b): Figure 1.Illustration of the half bridge. 当需要电机正反两个方向旋转时,采用双极性驱动方式,如下: Figure 2.Illustration of the H bridge. 功能逻辑如下:(1:合并,0:断开) S1 S2 S3 S4 电机动作 1 0 0 1 正传 0 1 1 0 反转 0 0 0 0 自由 0 1 0 1 刹车 1 0 1 0 刹车 这又称为全桥驱动,上图中开关使用大功率MOS管替代,可以使用分立元件,也可以使用集成电路。但是能用于PWM驱动的低电压大电流芯片产品并不多,在智能车比赛中使用最多的有:MC33886, VNH3SP30, BTS7960B, DT340I, IRF3205。 根据查阅的资料,使用单片MC33886时易发生发热、噪声等问题,对电源电压影响过大等问题,所以可以使用两片并联,如下所示:
该接法降低了MOS管的导通内阻,增大了驱动电流,可以起到增强驱动能力、减小芯片发热的作用,但是起始频率受限,电机噪声大且发热严重。 VNH3SP30是意法半导体公司生产的专用于电机驱动的大电流功率集成芯片。芯片核心是一个双单片上桥臂驱动器(HSD)和2个下桥臂开关,HSD开关的设计采用ST的ViPowe 技术,允许在一个芯片内集成一个功率场效应MOS管和智能信号/保护电路。下桥臂开关是采用ST专有的EHD(STripFET)工艺制造的纵向场效应MOS管。3个模块叠装在一个表面组装MultiPowerSO- 30引脚框架电绝缘封装内,具体性能指标如下: ①最大电流30 A、电源电压高达40 V; ②功率MOS管导通电阻0.034 Ω; ③5 V兼容的逻辑电平控制信号输入;④内含欠压、过压保护电路;⑤芯片过热报警输出和自动关断。与MC3886相比,它具有一个显著优点就是芯片不会发热,且保护功能强大,但是存在开关频率限10 kHz,电机噪声大且电机容易发热,但芯片较贵,很多场合性价比不高。 采用2个半桥智能功率驱动芯片BTS7960B组合成一个全桥驱动器,驱动直流电机转动。BTS7960B是应用于电机驱动的大电流半桥集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。P沟道高边开关省去了电荷泵的需求,因而减少了电磁干扰(EMI)。集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和超温、过压、欠压、过流及短路保护功能。BTS7960B的通态电阻典型值为16 mΩ,驱动电流可达43 A,调节SR引脚外接电阻的大小可以调节MOS
RS485通信原理 1. RS-485的电气特点:逻辑“1”以两线间的电压差为+(2—6)V表示;逻辑“0”以两线间的电压差为-(2—6)V表示。接口旌旗灯号电平比RS-232-C 降低了,就不易破坏接口电路的芯片,且该电平与TTL电平兼容,可便利与TTL 电路连接。 2. RS-485的数据最高传输速度为10Mbps 。 3. RS-485接口是采取均衡驱动器和差分接收器的组合,抗共模干才能加强,即抗噪声干扰性好。 4. RS-485接口的最大年夜传输距离标准值为4000英尺,实际上可达 3000米,别的RS-232-C接口在总线上只许可连接1个收发器,即单站才能。而RS-485接口在总线上是许可连接多达128个收发器。即具有多站才能,如许用户可以应用单一的RS-485接口便利地建立起设备收集。 因RS-485接口具有优胜的抗噪声干扰性,长的传输距离和多站才能等上述长处就使其成为首选的串行接口。因为RS485接口构成的半双工收集一般只需二根连线,所以RS485接口均采取樊篱双绞线传输。 RS485接口连接器采取DB-9的9芯插头座,与智能终端RS485接口采取DB-9(孔),与键盘连接的键盘接口RS485采取DB-9(针)。 RS485编程 串口协定只是定义了传输的电压,阻抗等,编程方法和通俗的串口编程一样RS-232与RS-422之间转换道理和接法 平日我们对于视频办事器、录像机、切换台等直接播出、切换控制重要应用串口进行,重要应用到RS-232、RS-422与RS-485三种接口控制。下面就串口的接口标准以及应用和外部插件和电缆进行商量。 RS-232、RS-422与RS-485标准只对接口的电气特点做出规定,而不涉及接插件、电缆或协定,在此基本上用户可以建立本身的高层通信协定。例如:视频办事器都带有多个RS422串行通信接口,每个接口均可经由过程RS422通信线由外部计算机控制实现记录与播放。视频办事器除供给各类控制硬件接口外,还供给协定接口,如RS422接口除支撑RS422的Profile协定外,还支撑 Louth、Odetics 、BVW等经由过程RS422控制的协定。 RS-232、RS-422与RS-485都是串行数据接口标准,都是由电子工业协会(EIA)制订并宣布的,RS-232在1962年宣布。RS-422由RS-232成长而来,为改进RS-232通信距离短、速度低的缺点,RS- 422定义了一种均衡通信接口,将传输速度进步到10Mbps,传输距离延长到4000英尺(速度低于100Kbps时),并许可在一条均衡总线上连接最多10个接收器。RS-422是一种单机发送、多机接收的单向、均衡传输规范,被定名为TIA/EIA-422-A标准。为扩大应用范围,EIA又于 1983年在RS-422基本上制订了RS-485标准,增长了多点、双向通信才能,即允很多个发送器连接到同一条总线上,同时增长了发送器的驱动才能和冲突保护特点,扩大了总线共榜样围,后定名为TIA/EIA-485-A标准。 1. S-232串行接口标准 今朝RS-232是PC机与通信工业中应用最广泛的一种串行接口。RS-232被定义为一种在低速度串行通信中增长通信距离的单端标准。RS-232采取不均衡传输方法,即所谓单端通信。收、发端的数据旌旗灯号是相对于旌旗灯号地。典范的RS-232旌旗灯号在正负电平之间摆动,在发送数据时,发送端驱动器输出
9.1通讯概述 本公司系列变频器向用户提供工业控制中通用的RS485通讯接口。通讯协 议采用MODBU标准通讯协议,该变频器可以作为从机与具有相同通讯接口并采用相同通讯协议的上位机(如PLC控制器、PC机)通讯,实现对变频器的集中 监控,另外用户也可以使用一台变频器作为主机,通过RS485接口连接数台本 公司的变频器作为从机。以实现变频器的多机联动。通过该通讯口也可以接远控键盘。实现用户对变频器的远程操作。 本变频器的MODBU通讯协议支持两种传送方式:RTU方式和ASCII方式,用户可以根据情况选择其中的一种方式通讯。下文是该变频器通讯协议的详细说明。 9.2通讯协议说明 9.2.1通讯组网方式 (1)变频器作为从机组网方式: 图9-1从机组网方式示意图 (2)多机联动组网方式:
9.2.2通信协议方式 该变频器在RS485网络中既可以作为主机使用,也可以作为从机使用,作为主机使用时,可以控制其它本公司变频器,实现多级联动,作为从机时,机或PLC可以作为 主机控制变频器工作。具体通讯方式如下: (1) 变频器为从机,主从式点对点通信。主机使用广播地址发送命令时,从机不应答。 (2) 变频器作为主机,使用广播地址发送命令到从机,从机不应答。 (3) 用户可以通过用键盘或串行通信方式设置变频器的本机地址、波特率、数据格式。 (4) 从机在最近一次对主机轮询的应答帧中上报当前故障信息。 9.2.3通讯接口方式 通讯为RS485接口,异步串行,半双工传输。默认通讯协议方式采用方式。 默认数据格式为:1位起始位,7位数据位,2位停止位。 默认速率为9600bps,通讯参数设置参见P3.09?P3.12功能码。 9.3 ASCII通讯协议 字符结构: 10位字符框(For ASCII ) (1 —7-2格式,无校验) 起始位 1 2 3 4 5 6 7 停止位停止位 (1 —7- 1格式,奇校验)PC ASCII 图9-2多机联动组网示意图