空间四连杆机构的等视角原理及应用
莫灿林陈延生
摘要
(本文通过对空间四连杆机构的等视角原理、相对运动转换及相对转动极线确定方法和研究,找到按给定连架杆两组、三组、四组对应位置的空间四连杆机构的几何设计方法。)
1、空间四连杆机构的等视角原理:
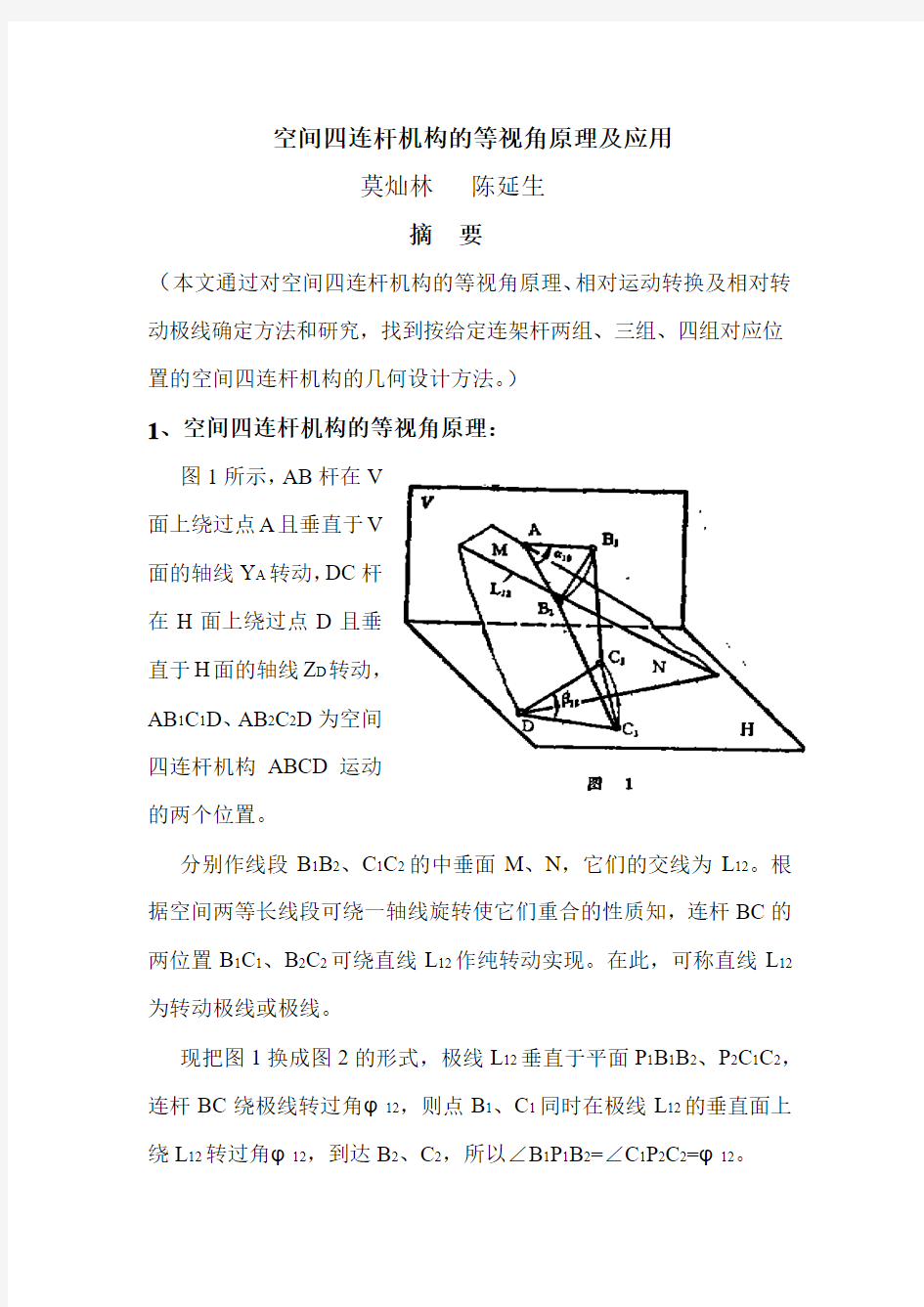
图1所示,AB杆在V
面上绕过点A且垂直于V
面的轴线Y A转动,DC杆
在H面上绕过点D且垂
直于H面的轴线Z D转动,
AB1C1D、AB2C2D为空间
四连杆机构ABCD运动
的两个位置。
分别作线段B1B2、C1C2的中垂面M、N,它们的交线为L12。根据空间两等长线段可绕一轴线旋转使它们重合的性质知,连杆BC的两位置B1C1、B2C2可绕直线L12作纯转动实现。在此,可称直线L12为转动极线或极线。
现把图1换成图2的形式,极线L12垂直于平面P1B1B2、P2C1C2,连杆BC绕极线转过角φ12,则点B1、C1同时在极线L12的垂直面上绕L12转过角φ12,到达B2、C2,所以∠B1P1B2=∠C1P2C2=φ12。
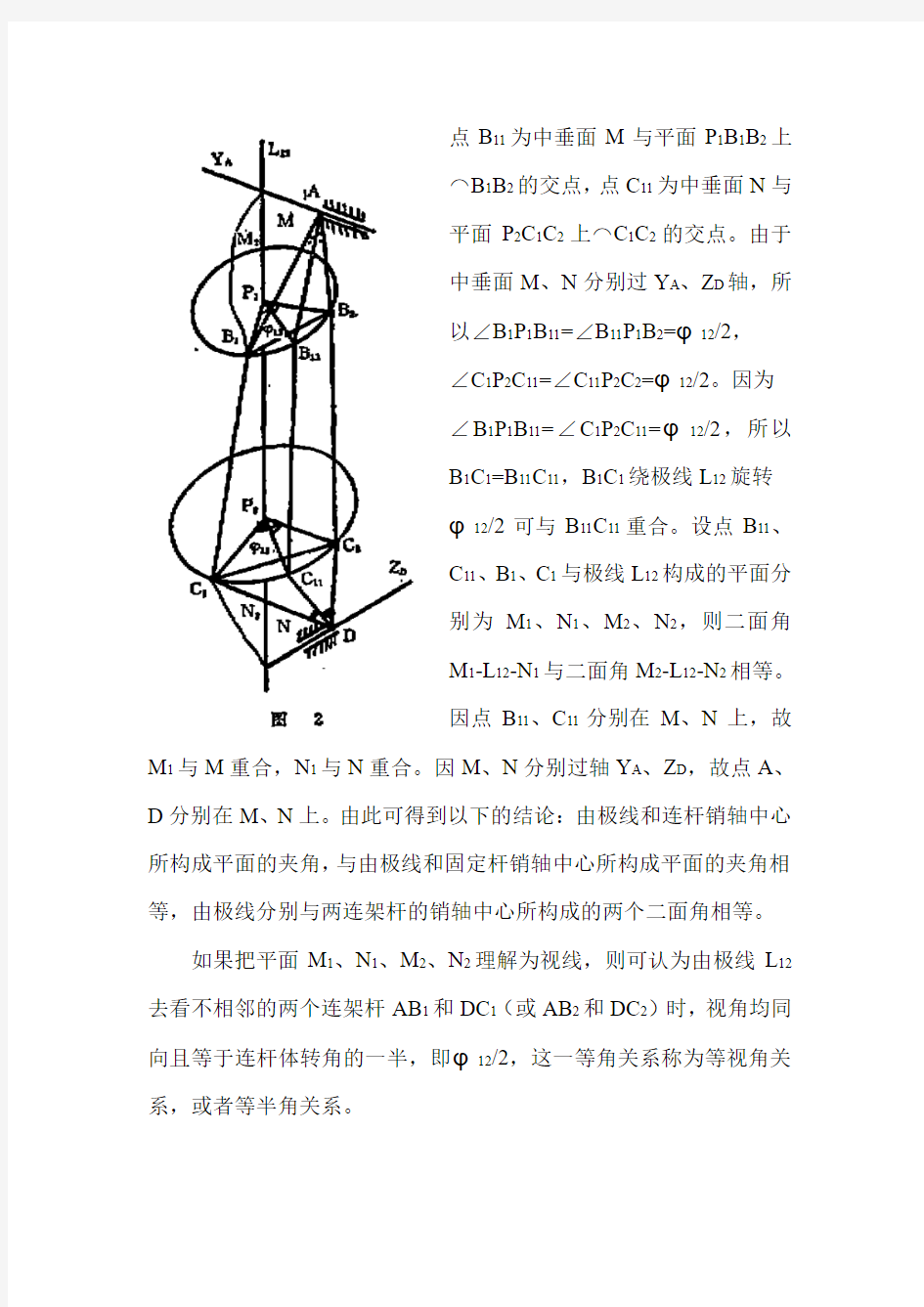
⌒B1B2的交点,点C11为中垂面N与
平面P2C1C2上⌒C1C2的交点。由于
中垂面M、N分别过Y A、Z D轴,所
以∠B1P1B11=∠B11P1B2=φ12/2,
∠C1P2C11=∠C11P2C2=φ12/2。因为
∠B1P1B11=∠C1P2C11=φ12/2,所以
B1C1=B11C11,B1C1绕极线L12旋转
φ12/2可与B11C11重合。设点B11、
C11、B1、C1与极线L12构成的平面分
别为M1、N1、M2、N2,则二面角
M1-L12-N1与二面角M2-L12-N2相等。
因点B11、C11分别在M、N上,故
M1与M重合,N1与N重合。因M、N分别过轴Y A、Z D,故点A、
D分别在M、N上。由此可得到以下的结论:由极线和连杆销轴中心
所构成平面的夹角,与由极线和固定杆销轴中心所构成平面的夹角相
等,由极线分别与两连架杆的销轴中心所构成的两个二面角相等。
如果把平面M1、N1、M2、N2理解为视线,则可认为由极线L12
去看不相邻的两个连架杆AB1和DC1(或AB2和DC2)时,视角均同
向且等于连杆体转角的一半,即φ12/2,这一等角关系称为等视角关
系,或者等半角关系。
2、空间四连杆机构的相对运动转换及相对转动极线
2.1 相对运动转换及相对转动极线
图3所示,任给定空间四
连杆机构ABCD两个运动位
置的机构简图。AB杆在V面
上绕过点A且垂直于V面的
轴线Y A转动,转角为α12;
DC杆在H面上绕过点D且
垂直于H面的轴线Z D转动,
转角为β12。
把空间四边形AB2C2D看成刚体,绕Z D轴旋转-β12角,使DC2与DC1重合。此时把DC1看作固定构件,DAB1C1、DA0B21C21看作四连杆机构的两个位置。分别作线段AA0、B1B21的中垂面Q1、Q2(图中未画出),则两中垂面的交线R12即为连杆AB由位置AB1转到位置A0B21的转动极线,R12称为相对转动极线。因为空间一线段的两预定位置可以通过一次旋转达到,两组对应点中垂面的交线是其唯一的旋转轴,所以当直线AB1、A0B21的两组对应点(或一组对应点和两直线的对应方向)给定后,R12即为唯一的相对转动极线,而与参考长度AB1=AB2=A0B21无关。
由等视角原理可知,两平面AxR12、DxR12所形成的二面角与两平面B1xR12、C1xR12所形成的二面角相等。
因为AB2绕Z D轴转过-β12角后即可达到位置A0B21,故确定R12
只与β12有关,而与DC杆的起始位置DC1无关。
图4所示,V面上的圆A
其半径为AB1,AB1绕Y A轴
转过α12角后到达AB2位置;
V面绕Z D轴转过-β12角后
到达新位置V0面,AB2的新
位置A0B21。Y A轴与Z D轴相
交。在前面已得知A0B21:转
到与AB1重合,其旋转轴R12
是唯一的。因为点A在Y A轴上,Y A轴与Z D轴相交,V面绕Z D轴转过-β12后到达V0面,所以线段AA0的中垂面Q1过Z D轴,并为两平面V、V0形成二面角的平分面;又因为R12在Q1面上,所以线段A0B21绕R12转到与线段AB1重合时,圆A与圆A0重合,圆周A0上的点与圆周A上的存在着一一对应的关系(点B21对应B1)。因此,当Y A轴与Z D轴相交时,R12的唯一性只与角α12有关,而与AB杆的起始位置AB1无关。R12、Y A、Z D三线共点。
如果V面与H面重合,空间四连杆机构则演变成平面四连杆机构。
2.2 相对转动极线的确定方法
在以后的问题中,均设V面垂直于H面,AB1对V面与H面交线的倾角γ。
对任意给定的空间四连杆RSSR机构ABCD两连架杆的相应转角为α12、β12(转动方向图中所示),以及AB杆的起始位置AB1,
则机构的相对转动极线的确定方法如下所述,图解过程参阅图5所示。
(1)任取参考长度AB1=AB2;
(2)把AB2绕过点D的铅垂轴Z D转过-β12,得A0B11;
(3)分别做线段AA0、B1B21的中垂面Q1和Q2;
(4)求作出两平面Q1、Q2的交线R12,则R12为所求的相对转动极线,且R12与Z D相交。
对需确定的机构,如果给定Y A轴与Z D轴相交,则AB杆的起始位置AB1与确定R12无关,角γ可任意选择。
3、按给定连架杆若干组对应位置的机构设计
在以下的问题中,给出的连架杆若干组对应位置——相应的转角,因它们仅与机构的相对尺寸有关,故可任意选取合适的固定铰链A、
D的位置来进行机构设计。
3.1给定连架杆两组对应位置的机构设计
给定空间RSSR机构ABCD两连架杆的相应转角分别为α12、β12,其转动方向如图所示,Y A轴与Z D轴相交,设计该机构。
图6所示,设计此空间四连
杆机构时,首先确定固定转轴
Y A、Z D的位置,按需要确定连
架杆AB的起始位置AB1。如
Y A轴不与Z D轴相交,则按角γ
给出AB1的位置;然后确定机构
的相对转动极线R12,最后在—
AB1的位置上任取一点作为铰链中心B,根据等视角原理,使由平面BxR12(J2)与平面CxR12(T2)形成的二面角J2-R12-T2等于由平面AxR12(M2)与平面DxR12(N2)形成的二面角M2-R12-N2,即可在平面T2上任取一合适点作为铰链中心C。直线L为T2面与H面的交线,Z D轴在N2面上。
对给定的转角α12、β12,如果转动方向相同,则必需使所得机构的连杆BC在H面上的投影bc不与固定件AD在H面上的投影ab 相交;反之则相交。在选取铰链中心C时,应考虑点C与点B1、B2的相对位置,否则所确定的机构将得不到对应的转角关系。正如点C 在过点B的水平面下,则点B2、B1对水平投影面的上、下关系就能得到保持。
因为点C在T2面上任意选择都能满足等视角的关系,且随着铰链中心B的位置选择不同,可得到无数个T2的平面,所以在理论上铰链中心C有无穷个解。但是,由于四连杆机构是在铰链强制约束下运动的,而运动连杆的区间是有限制的,所以在满足机构存在的条件下,要使两连架杆满足给定的转角对应关系,则铰链中心C的选择,其实用上的解较理论上的少。
机构设计的作图步骤如下所述,图解结果见图7所示。
(1)求作出机构的相对转动极
线R12;
(2)进行两次投影变换,把
R12变换或投影面垂直线;
(3)在—AB1位置上任取一点
作为铰链中心B;
(4)作二面角M2-R12-N2等于
二面角J2-R12-T2;
(5)把T2面上(V1/H2)投影
系变换回原投影系;【2】
(6)在T2面上取适当的点作为铰链中心C,求作出连杆BC的实长,则机构得以确定。
3.2 给定连架杆三组对应位置的机构设计
给定空间RSSR机构ABCD 两连架杆的两组相应转角分别为
α12、β12、α13、β13,其转动方向如图所示,Y A轴与Z D轴相交,
设计该机构。
机械设计的作图步骤如下所述,图解结果见图8所示。
(1)求作出机构的相对转动极线R12、R13;
(2)进行投影变换,分别把R
12、
R13变换成投影面垂直线。
(3)在—AB1位置上任取一点作
为铰链中心B,设平面AxR13、
BxR13、CxR13、DxR13分别为M3、
J3、T3、N3;
(4)分别作二面角M2-R12-N2等
于二面角J2-R12-T2,二面角
M3-R13-N3等于二面角J3-R13-T3;
(5)把平面T2、T3变换回原投影系,并作出它们的交线L1,因Y A 与Z D轴相交,故R12、R13、Y A、Z D、L1五线共点;
(6)在L1上取适当的点作为铰链中心C。
参考文献
1、张世民编《平面连杆机构设计》,北京:高等教育出版社,1985:51-57。
2、费罗洛夫CA(苏)著,北京工业学院制图教研室译《画法几何学》,北京:高等教育出版社,1983:83-85。
Principle of Egual View Angles of Spatial
Four-bar linkage and It’s Application
Mo Canlin
(Mechanical Engin . Dept .)
Chen Yansheng
(Spare-time school for staff of Quzhou)
Abstract
On the basis of equal view angle principle relative motion transfer , and relative rotation pole-line determination , introduces a geometric design method of spatial four-bar linkage mechanism under a giren corresponding location of two , three, or four sets of linkages.
Key words: Spatial mechanism; Linkage;Relative motion;
Equal view angle.
机械原理课程设计 任务书 题目:连杆机构设计B4 姓名:戴新吉 班级:机械设计制造及其自动化2011级3班 设计参数 设计要求: 1.用解析法按计算间隔进行设计计算; 2.绘制3号图纸1张,包括: (1)机构运动简图; (2)期望函数与机构实现函数在计算点处的对比表; (3)根据对比表绘制期望函数与机构实现函数的位移对比图; 3.设计说明书一份; 4.要求设计步骤清楚,计算准确。说明书规范。作图要符合国家标。按时独 立完成任务。 目录
第1节平面四杆机构设计连杆机构设计的基本问题
连杆机构设计的基本问题是根据给定的要求选定机构的型式,确定各构件的尺寸,同时还要满足结构条件(如要求存在曲柄、杆长比恰当等)、动力条件(如适当的传动角等)和运动连续条件等。 根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的,但这些设计要求可归纳为以下三类问题: (1)预定的连杆位置要求; (2)满足预定的运动规律要求; (3)满足预定的轨迹要求; 连杆设计的方法有:解析法、作图法和实验法。 作图法设计四杆机构 对于四杆机构来说,当其铰链中心位置确定后,各杆的长度也就确定了。用作图法进行设计,就是利用各铰链之间相对运动 的几何关系,通过作图确定各铰链的位置,从而定出各杆的长度。 作图法设计四杆机构的特点 图解法的特点是直观、简单、快捷,对三个设计位置以下的设计是十分方便的,其设计精度也能满足工作的要求,并能为解析法精确求解和优化设计提供初始值。 根据设计要求的不同分为四种情况: (1) 按连杆预定的位置设计四杆机构; (2) 按两连架杆预定的对应角位移设计四杆机构; (3) 按预定的轨迹设计四杆机构; (4) 按给定的急回要求设计四杆机构。
第七章空间连杆机构运动分析 第七章空间连杆机构运动分析 (1) 7.1空间机构运动分析矩阵法:刚体空间位移矩阵 (2) 7.1.1 绕直角坐标轴的旋转 (2) 7.1.2 空间旋转矩阵 (3) 7.1.2.1 按右手规则绕三维直角坐标轴的一系列旋转表示空间旋转 (3) 7.1.2.2 绕空间任意轴u旋转φ角表示空间旋转 (3) 7.1.2.3 用欧拉角ψ,θ和φ来描述空间旋转 (4) 7.1.3 刚体位移矩阵及其逆 (4) 7.1.4 旋转矩阵与位移矩阵的微分 (5) 7.1.4.1 旋转矩阵的微分 (5) 7.1.4.2 位移矩阵的微分 (6) 7.2空间四杆机构运动分析 (7) 7.2.1 空间四杆机构RSSR运动分析 (7) 7.2.2 习题 (8) 7.3空间串联机器人运动分析 (8) 7.3.1 3-RPR运动分析 (8) 7.3.2 RRRRRR机械手运动分析 (11) 7.4空间并联机器人运动分析 (12) 7.4.1 6-SPS并联机构的位置分析 (12) 7.5参考文献 (13)
7.1 空间机构运动分析矩阵法:刚体空间位移矩阵 在三维空间中,刚体的总位移可以视为刚体的角位移和刚体上任何适当参考点的线位移这两个基本位移分量的总和。描述刚体位移有好几种方法,其中较常用的是绕三角坐标轴的一组旋转矩阵、绕空间任意一轴的旋转矩阵和欧拉角旋转矩阵。下面分别讨论这三种旋转矩阵。 7.1.1 绕直角坐标轴的旋转 图表示固连在旋转刚体上的一个定长向量绕z 轴的旋转向量v 在位移前后的所有分量都是以相对固定的x-y 轴参考系来度量。当向量1v 绕z 轴旋转α角,到达2v 处时,有下列方程(参见邹老师的教材P62) 21121121cos sin sin cos x x y y x y z z v v v v v v v v αα αα=-=+= (7.1) 把上式写成矩阵的形式,有 212121cos sin 0sin cos 00 1x x y y z z v v v v v v α α αα-????????????=?????????????????? (7.2) 上式可缩写成如下的形式,即 2,1()[]()z v R v α= (7.3) 式中,[]z R α为绕z 轴转α角的旋转矩阵,有 ,cos sin 0[]sin cos 00 1z R ααααα-?? ??=?? ???? (7.4) 同理,可写出分别绕y 轴和x 轴旋转的矩阵 ,cos 0sin []010sin 0cos y R βββββ?? ??=?? ??-?? (7.5) ,1 00[]0cos sin 0sin cos z R γγ γγ γ?? ??=-?????? (7.6)
空间四连杆机构的等视角原理及应用 莫灿林陈延生 摘要 (本文通过对空间四连杆机构的等视角原理、相对运动转换及相对转动极线确定方法和研究,找到按给定连架杆两组、三组、四组对应位置的空间四连杆机构的几何设计方法。) 1、空间四连杆机构的等视角原理: 图1所示,AB杆在V 面上绕过点A且垂直于V 面的轴线Y A转动,DC杆 在H面上绕过点D且垂 直于H面的轴线Z D转动, AB1C1D、AB2C2D为空间 四连杆机构ABCD运动 的两个位置。 分别作线段B1B2、C1C2的中垂面M、N,它们的交线为L12。根据空间两等长线段可绕一轴线旋转使它们重合的性质知,连杆BC的两位置B1C1、B2C2可绕直线L12作纯转动实现。在此,可称直线L12为转动极线或极线。 现把图1换成图2的形式,极线L12垂直于平面P1B1B2、P2C1C2,连杆BC绕极线转过角φ12,则点B1、C1同时在极线L12的垂直面上绕L12转过角φ12,到达B2、C2,所以∠B1P1B2=∠C1P2C2=φ12。
⌒B1B2的交点,点C11为中垂面N与 平面P2C1C2上⌒C1C2的交点。由于 中垂面M、N分别过Y A、Z D轴,所 以∠B1P1B11=∠B11P1B2=φ12/2, ∠C1P2C11=∠C11P2C2=φ12/2。因为 ∠B1P1B11=∠C1P2C11=φ12/2,所以 B1C1=B11C11,B1C1绕极线L12旋转 φ12/2可与B11C11重合。设点B11、 C11、B1、C1与极线L12构成的平面分 别为M1、N1、M2、N2,则二面角 M1-L12-N1与二面角M2-L12-N2相等。 因点B11、C11分别在M、N上,故 M1与M重合,N1与N重合。因M、N分别过轴Y A、Z D,故点A、 D分别在M、N上。由此可得到以下的结论:由极线和连杆销轴中心 所构成平面的夹角,与由极线和固定杆销轴中心所构成平面的夹角相 等,由极线分别与两连架杆的销轴中心所构成的两个二面角相等。 如果把平面M1、N1、M2、N2理解为视线,则可认为由极线L12 去看不相邻的两个连架杆AB1和DC1(或AB2和DC2)时,视角均同 向且等于连杆体转角的一半,即φ12/2,这一等角关系称为等视角关 系,或者等半角关系。
《机械设计基础》作业二--平面连杆机构 姓名班级学号成绩 一、填空题:(24分) 1、平面连杆机构,至少需要4个构件。 2、平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 3、在铰链四杆机构中,运动副全部是转动副。 4、在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5、某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 6、对心曲柄滑快机构无(有,无)急回特性;若以滑块为机架,则将演化成移动导杆机构。 双曲柄机构和双摇杆机构。如图所示铰链四 杆机构中,若机构以AB为机架时,则为双曲柄机 构;以BC杆为机架时,它为曲柄摇杆机构; 以CD杆为机架时,它为双摇杆机构;而以 AD杆为机架时,它为曲柄摇杆机构。 8、在曲柄摇杆机构中,当曲柄与机架两次共线位置时出现最小传动角。 9、压力角指:从动件上作用的力F 与该力作用点的速度(绝对速度)方向所夹的锐角α。 10、机构的压力角越小(大,小)对传动越有利。 11、运动副中,平面接触的当量摩擦系数为 f ,槽面接触的当量摩擦系数为f/sinθ,圆柱面接触的当量摩擦系数为ρ/r 。 12、移动副的自锁条件是驱动力F 与法向反力N的夹角β小于摩擦角?,即驱动力作用在摩擦角之内,转动副的自锁条件是驱动力作用在摩擦圆之内,即e<ρ,其中e为驱动力臂长,螺旋副的自锁条件是螺纹升角α小于或等于螺旋副的摩擦角或当量摩擦角,即α≤?。 二、选择题(27分) 1、当四杆机构处于死点位置时,机构的压力角____B____。 A.为0o B.为90o C.与构件尺寸有关 2、四杆机构的急回特性是针对主动件作___A_____而言的。 A. 等速转动 B. 等速移动 C. 变速转动或变速移动 3、对于双摇杆机构,最短构件与最长构件长度之和____B____大于其它两构件长度之和。 A . 一定 B. 不一定 C. 一定不 4、曲柄摇杆机构___B_____存在急回特性。 A . 一定 B. 不一定 C. 一定不 5、平面四杆机构所含移动副的个数最多为____B____。 A. 一个 B. 两个 C. 基圆半径太小
第八章 平面连杆机构及其设计 题8-1 试画出图示两种机构的机构运动简图,并说明他们各为何种机构。在图a 中偏心盘1绕固定轴O 转动,迫使滑块2在圆盘3的槽中来回滑动,而圆盘3又相对于机架4转动;在图b 中偏心盘1绕固定轴O 转动,通过构件2,使滑块3相对于机架4往复移动。(图a 的机构运动简图可有两种表达方式,绘出其中之一即可) A B (a) O 12 3 4 A B O 123导杆机构 或 O 曲柄摇块机构 题8-1 (b) 题8-2如图所示,设已知四杆机构各构件的长度a=240mm ,b=600mm ,c=400mm ,d=500mm ,试回答下列问题: 1)当取杆4为机架时,是否有曲柄存在?__________若有曲柄,则杆a 为曲柄,此时该机构为__________机构。 2)要使机构成为双曲柄机构,则应取杆_________为机架。
3) 要使此机构成为双摇杆机构,则应取杆_______为机架,且其长度的允许变动范围为_______________. 4) 如将杆4的长度改为d=400mm,而其他各杆的长度不变,则当分别以1、2、3杆为机架时,所获得的机构为___________机构。 解:1)因900500400600240=+=+≤+=+d c b a 且最短杆1为连架杆,故当取杆4为机架时,有曲柄存在。此时该机构为曲柄摇杆机构。 2)要使此机构成为双曲柄机构,则应取最短杆1为机架。 3)要使此机构成为双摇杆机构,则取最杆3为机架,其长度的允许变动范围为: (1)因最短杆1为连杆,即使满足杆长条件,此机构也不能成为双摇杆机构 (2)不满足杆长条件时,b 为最长杆,c 为最短杆,d a c b +>+ 140>c c 为最长杆,但不可能大于三杆长度之和 d b a c ++< 故1340 第6讲平面多杆机构和空间连杆机构简介 8.6.1 平面多杆机构的功用 8.6.2 平面多杆机构的分类 8.6.3 空间多杆机构简介 说明:多杆机构的尺度参数较多,可以满足更为复杂的或实现更加精确的运动规律要求和轨迹要求,但其设计也较困难。 5)实现从动件带停歇的运动 (单停歇运动,双停歇运动) 6)扩大机构从动件的行程 7)使机构的从动件的行程可调 8)实现特定要求下的平面导引 1)可获得较小的运动所占空间 2)取得有利的传动角 3)获得较大的机械利益 4)改变从动件的运动特性 平面多杆机构有如下功用: (1 ) 多杆机构的分类 (2)六杆机构的类型 2)斯蒂芬森(Stephenson )型,有三种。 1)按杆数目分:五杆、六杆、八杆机构等 2)按自由度分:单自由度、两自由度和三自由度多杆机构 1)瓦特(Watt )型,有两种。 瓦特型 斯蒂芬森型 有缘学习更多+谓ygd3076考证资料或关注桃报:奉献教育(店铺) (3)六杆机构的应用 (1)空间连杆机构概述 空间连杆机构——具有空间运动的连杆机构 组成特点:具有空间运动的连杆;运动副用有空间运动副。 机构命名:常以杆数命名, 也常以所用运动副命名。 机构特点:用较少数目的构件实现空间复杂运动,结构紧凑,运动多样性和灵活性好,在工程实践中的应用越来越多。但其分析和综合均较为复杂。 有缘学习更多+谓ygd3076考证资料或关注桃报:奉献教育(店铺) (2)万向铰链机构 1)单万向铰链机构 机构组成:由末端各有一叉的主、从动轴和中间“十”字构件铰接而成。 机构特点:可变角传动机构,两轴的平均传动比为1;但瞬时角速度比却不恒等于1,而是随时间变化的。 机构的运动特性:当主动轴Ⅰ以ω 等速回转时,从动轴Ⅱ的ω2变化范围: 1 ω1cosα ≤ω2≤ω1/cosα 其变化幅度与两轴夹角α有关,一般α≤30°。 机械原理2013—2014学年 大作业 设计题目:四连杆式门座起重机 工作机构设计 姓名:瑞 学号: 20116447 专业班级: 11级铁道车辆一班 指导教师:何俊 2013/11/10 题目介绍、要求以及数据 设计题目:四连杆式门座起重机工作机构设计 一、设计题目简介 四连杆门座起重机 是通用式门座起重机, 广泛应用于港口装卸、 修造船厂、钢铁公司,主 要由钢结构、起升机构、 变幅机构、回转机构、 大车运行机构、吊具装 置(抓斗、简易集装箱 吊具、吊钩)、电气设备 及其它必要的安全和辅助设备组成。通过四连杆控制在吊臂前后运动的时候)起吊节点保持水平高度不变。 二、设计数据与要求 题号起重量 t 工作幅度(米)起升高度(米)工作速度m/min 装机容量 KW L2 L1 H1 H2 起升变幅回转运行 C 10 25 8 15 9 50 50 1.5 25 330 三、设计任务 1、依据设计参数绘出机构运动简图,并进行运动分析,确定实现起 吊点轨迹的机构类型 2、依据提供的设计数据对四连杆起吊机构进行尺度综合,确定满足 使用要求的构件尺寸和运动副位置; 3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构 进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 4、编写说明书,其中应包括设计思路、计算及运动模型建立过程 以及效果分析等。 5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。 第一章、四连杆式门座起重机的介绍 第一节、四连杆式门座起重机的概述 门座起重机是起重机的一种,是随着港口事业发展起来的。第一次在港口上运用门座式起重机是在1890年将幅度不可变的固定式可旋转臂架型起重机横跨在窄型码头上,这是门座起重机的第一次运用。在第二次世界大战之后港用门座起重机迅速发展,在发展的过程中门座起重机还逐渐应用到作业条件与港口相近的船台和水电站等工作地点。 图1-1 M10-30门座起重机总图 ⒈电缆卷筒;2.转柱;3.门座;4.转台;5.机器房;6.起重量限制器;7. 变幅机构;8.臂架系统;9.防转装置;10.吊钩装置;11.抓斗稳定器;12. 抓斗;13.司机室;14.回转机构;15.起升机构;16.运行机构 空间连杆机构 空间连杆机构由若干刚性构件通过低副(转动副﹑移动副)联接﹐而各构件上各点的运动平面相互不平行的机构﹐又称空间低副机构 中文名空间连杆机构 外文名spatial linkage 又名空间低副机构 低副转动副、移动副 组成单自由度空间闭链机构 应用领域农业机械、轻工机械、纺织机械 1简介 spatial linkage 由若干刚性构件通过低副(转动副、移动副)联接,而各构件上各点的运动平面相互不平行的机构,又称空间低副机构。在空间连杆机构中,与机架相连的构件常相对固定的轴线转动、移动,或作又转又移的运动,也可绕某定点作复杂转动;其余不与机架相连的连杆则一般作复杂的空间运动。利用空间连杆机构可将一轴的转动转变为任意轴的转动或任意方向的移动,也可将某方向的移动转变为任意轴的转动,还可实现刚体的某种空间移位或使连杆上某点轨迹近似于某空间曲线。与平面连杆机构相比,空间连杆机构常有结构紧凑、运动多样、工作灵活可靠等特点,但设计困难,制造较复杂。空间连杆机构常应用于农业机械、轻工机械、纺织机械、交通运输机械、机床、工业机器人、假肢和飞机起落架中。 组成 空间连杆机构常指单自由度空间闭链机构,但是随着工业机器人和假肢技术的发展,多自由度空间开链机构也有不少用途。单自由度单环平面连杆机构只含4个转动副,而单自由 度单环空间连杆机构所含转动副应为7个,此即空间七杆机构。空间连杆机构中采用多自由度的运动副如球面副或圆柱副时,所含构件数即可减少而形成简单稳定的空间四杆机构或三杆机构。为了表明空间连杆机构的组成类型,常用R、P、C、S、H分别表示转动副、移动副、圆柱副、球面副、螺旋副。一般空间连杆机构从与机架相连的运动副开始,依次用其中的一些符号来表示。常用空间四杆机构的组成类型有RSSR、RRSS、RSSP和RSCS机构这些机构因含有两个球面副,结构比较简单,但绕两球心连线自由转动的局部自由度影响高速性能。所有转动副轴线汇交一点的球面四杆机构,也是一种应用较广的空间连杆机构,如万向联轴节机构。此外,还有某些特殊空间连杆机构,如贝内特机构,其运动副轴线夹角和构件尺度要求满足某些特殊关系。 3运动分析和综合 空间连杆机构的分析综合均较平面连杆机构复杂困难,这在很大程度上影响空间连杆机构的推广应用。研究空间连杆机构的方法有以画法几何为基础的图解法和运用向量、对偶数、矩阵和张量等数学工具的解析法。图解法有一定的局限性,应用较多的是便于电子计算机运算的解析法。空间连杆机构分析中重要而又困难的问题是位移分析。对多于4杆的空间连杆机构,由输入求输出位移时因中间运动变量不易避开或消去,一般要用数值迭代法联解多个非线性方程式或求解高次代数方程式。对最难进行位移分析的空间7R机构,由输入求输出位移的代数方程式高达32次。 4基本问题 对空间连杆机构进行运动综合的基本问题是:①当主动件运动规律一定时,要求连架从动件能按若干对应位置或近似按某函数关系运动;②要求连杆能按若干空间位置姿态运动而实现空间刚体的导引;③要求连杆上某点能近似沿给定空间曲线运动。由于这些问题和平面连杆机构的综合问题相仿,所以平面的巴默斯特尔理论可解析地推广于空间刚体的导引问题和其他运动综合问题。此外尚有利用机构封闭性等同条件建立设计方程式和采用优化技术等综合方法。 部讲义,请勿流传 第五讲 平面连杆机构及其设计 连杆机构的传动特点: 1.因为其运动副一般为低副,为面接触,故相同载荷下,两元素压强小,故可承受较大载荷;低副元素便于润滑,不易磨损;低副元素几何形状简单,便于制造。2.当原动件以同样的运动规律运动时,若改变各构件的相对长度,可使从动件得到不同的运动规律。3.利用连杆曲线满足不同的规矩要求。4.增力、扩大行程、实现远距离的传动(主要指多杆机构)。 缺点: 1.较长的运动链,使各构件的尺寸误差和运动副中的间隙产生较大的积累误差,同时机械效率也降低。2.会产生系统惯性力,一般的平衡方法难以消除,会增加机构动载荷,不适于高速传动。 平面四杆机构的类型和应用 一、平面四杆机构的基本型式 1.曲柄摇杆机构2.双曲柄机构 3.双摇杆机构 二、平面四杆机构的演化型式 1.改变构件的形状和运动尺寸 曲柄摇杆机构 -----曲柄滑块机构 2.改变运动副的尺寸 偏心轮机构可认为是将曲柄滑块机构中的转动副的半径扩大,使之超过曲柄的长度演化而成的。 3.选用不同的构件为机架 (a ) 曲柄滑块机构 (b )AB ①以最短构件的相邻两构件中任一构件为机架时,则最短杆为曲柄,而与机架相连的另一构件为摇杆,即该机构为曲柄摇杆机构。 ②以最短构件为机架,则其相邻两构件为曲柄,即该机构为双曲柄机构。 ③以最短构件的对边为机架,则无曲柄存在,即该机构为双摇杆机构。 3.不满足杆长条件的机构为双摇杆机构。 注:曲柄滑块机构有曲柄的条件:a + e ≤ b 导杆机构:a < b时,转动导杆机构; a > b时,摆动导杆机构。 例题: 第2章连杆机构分析和设计 2.1内容要求 1.掌握平面四杆机构的基本型式、特点及其演化方法。 2.熟练掌握和推导铰链四杆机构曲柄存在条件,并灵活运用来判断铰链四杆机构的类型; 掌握曲柄滑块机构及导杆机构等其他四杆机构的曲柄存在条件的推导过程。 3.掌握平面四杆机构的压力角、传动角、急回运动、极位夹角、行程速比系数、等基本概 念;掌握连杆机构最小传动角出现的位置及计算方法;掌握极位夹角与行程速比系数的关系式;掌握掌握死点在什么情况下出现及死点位置在机构中的应用。 4.掌握速度瞬心的概念及如何确定机构中速度瞬心的数目;掌握“三心定理”并应用“三 心定理”确定机构中速度瞬心的位置及对机构进行速度分析。 5.了解建立Ⅰ级机构、RRR杆组、RRP杆组、RPR杆组、PRP杆组、RPP杆组的运动分 析数学模型;掌握相对运动图解法及杆组法机构运动分析的方法。 6.掌握移动副、转动副中摩擦力的计算和自锁问题的讨论;掌握计及摩擦时平面连杆机构 受力分析的方法;掌握计算机械效率的几种方法;掌握从机械效率的观点研究机械自锁条件的方法和思想。 7.掌握平面四杆机构的运动特征及其设计的基本问题;了解“函数机构”、“轨迹机构”、 “导引机构”的设计思想、方法;掌握按给定行程速比系数设计四杆机构的方法。 2.2内容提要 一、本章重点 本章重点是铰链四杆机构曲柄存在条件,并灵活运用来判断铰链四杆机构的类型;连杆机构最小传动角出现的位置及计算方法;速度瞬心法对机构进行速度分析;计及摩擦时平面连杆机构受力分析的方法;按给定行程速比系数设计四杆机构的方法。 1.平面四杆机构的基本型式及其演化型式 平面四杆机构的基本型式是平面铰链四杆机构。在此机构中,与机架相联的构件称为连架杆;能作整周回转的连架杆称为曲柄,而不能作整周回转的连架杆称为摇杆;与机架不相连的中间构件称为连杆。能使两构件作整周相对转动的转动副称为周转副;而不能作整周相对转动的转动副称为摆转副。平面铰链四杆机构又根据两连架杆运动形式不同分为曲柄摇杆机构、双曲柄机构及双摇杆机构。 平面四杆机构的演化型式是在平面铰链四杆机构的基础上,通过一些演化方法演化而成其他型式的四杆机构。平面四杆机构的演化方法有: (1)改变构件的形状及运动尺寸; (2)改变运动副尺寸; (3)取不同构件为机架。 空间连杆机构在机械系统中的应用 摘要:空间连杆机构在实现构件的空间运动方面, 与其他机械机构相比, 具有构件数少、结构简单等优点, 而且可实现平面机构不可能实现的某些运动,所以,空间连杆机构在轻工( 缝纫、针织、制鞋、制革等) 机械中有着广泛的应用, 在农业机械、交通工具、化工机械、仪器仪表以及各种控制装置中也有其应用的实例, 尤其在机器人、机械手机构中, 空间连杆机构几乎占着主导地位。 关键词:空间连杆机构;连杆机构实例; 正文: 平面多连杆机构作为传动机构,其优势是能够实现设计者所期望的多种运动规律和运动轨迹的要求,而且结构简单,容易制造,工作可靠。但欲使某简单机构实现复杂的运动要求时,该机构的设计过程通常是十分艰难的。随着生产的发展,机构的载荷与速度不断提高,对平面多连杆机构设计的要求也越来 越高。因此,如何设计可满足各种工程要求的平面多连杆机构,一直是该领域的重要课题。本报告会举例出使用空间连杆机构的三个例子,并对其进行分析,使我们获得一个空间连杆机构的直观感受。 一.石油钻井台 石油钻头试验机原理如图1 所示, 可模拟石油钻头钻井过程, 以便用来 测试石油钻头的各项性能。钻头试验机原理图模拟工作时, 2 个液压缸向下拉横梁, 横梁通过推力轴承推动钻杆向下运动, 钻杆穿过转盘( 转盘由动力装 置驱动, 除了旋转不可移动) 后接1个万向联轴节( 非普通设计) , 连接着是长3m 的钻杆,在钻杆的顶端装有钻头, 钻头在轴向力及转盘扭矩的共同作用 下向石块( 或铁块) 中钻进, 钻杆移动的行程为1. 2m。钻头在钻进过程中,由于受到很大的冲击轴向力与径向力作用, 振动非常剧烈。尤其是位于钻杆顶部的钻头, 因钻杆为悬臂, 所以其刚性很差, 且随着1. 2m 行程的加大, 钻头到转盘之间的钻杆悬臂长度也加长, 刚性进一步削弱, 最终使石油钻头打出 第三章 平面连杆机构及其设计 1、如图示的铰链四杆机构中,AD 为机架,AB a ==35 mm ,CD c ==50 mm ,30==d AD mm ,问BC b =在什么范围内该机构为双摇杆机构;该机构是否有可能成为双曲柄机构? 2、试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”? (1) (2) (3) (4) 5、在图示铰链四杆机构中,已知各构件的长度25=AB l mm ,55=BC l mm ,40=CD l mm , 50=AD l mm 。 (1)问该机构是否有曲柄,如有,指明哪个构件是曲柄; (2)该机构是否有摇杆,如有,用作图法求出摇杆的摆角范围; (3)以AB 杆为主动件时,该机构有无急回性?用作图法求出其极位夹角θ,并计算行程速度变化系数K ; (4)以AB 杆为主动件,确定机构的αmax 和γmin 。 6、图示为开关的分合闸机构。已知150=AB l mm ,200=BC l mm ,200=CD l mm , 400=AD l mm 。试回答: (1)该机构属于何种类型的机构; (2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ; (3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么? 7、试设计一曲柄摇杆机构。设摇杆两极限位置分别为4090,15021===CD l ; ??mm ,50=AD l mm 。求AB l 、BC l 及行程速比系数K 和最小传动角γmin 。 (用图解法求解用图解法求解,简述作图步骤,并保留作图过程) 8、现需设计一铰链四杆机构,已知摇杆CD 的长度l CD =150mm ,摇杆的两极限位置与机架AD 所成的角度 903021==??,,机 构的行程速比系数K =1,试确定曲柄AB 和连杆BC 的长度。 10、设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K =1.5,滑块的行程10021=C C l mm ,导路的偏距20=e mm 。 (1)用作图法确定曲柄长度l AB 和连杆长度l BC ; (2)若滑块从点C 1至C 2为工作行程方向,试确定曲柄的合理转向; (3)用作图法确定滑块工作行程和空回行程时的最大压力角。 单自由度空间单封闭连杆机构的结构类型综合 佳木斯工学院 于影 周欣 摘要 列出了带有转动副、移动副、圆柱副和球面副的空间单封闭形连杆机构的结构类型,并根据不同的结构特征来分类机构。 关键词:空间连杆机构 自由度 1 结构特性 本文所研究的是带有转动副(R)、移动副(P)、圆柱副(C)和球面副(S)的自由度为1的单封闭形空间连杆机构。这种机构的自由度(F)为:(1)如果F=1,则表示机构中不存在双球面副构件;(2)如果F=2,则表示机构中存在双球面副构件,我们把这个双球面副构件称为 自由转动连杆 ,因自由转动连杆有一个绕两球面中心联线转动的局部自由度,它不影响整个机构的运动,所以整个机构只要有一个主动件就能获得确定的运动。 我们称输入构件与机架所构成的运动副为输入副。输入副可以是转动副、移动副和圆柱副,它们分别由相应的动力源来驱动,当圆柱副作为输入副时,其直线位移或转角都可以作为机构的广义坐标。 2 结构公式 由于单封闭形机构的特点是所含运动副的总数P和构件数目n相同,而且不可能少于3,因此,对于F=1,闭合约束数 =6的一般空间机构,应满足下面的关系式 n=P1+P c+P s 3 F=6(n-1)-5P1-4P c-3P s (1)整理(1)式后可得: F=P1+2P c+3P s-6(2)而P1+2P c+3P s=7(3)这里:n为机构中包括机架在内的构件数目;P1= P R+P P为单自由度运动副的数目;P R、P P、P C及P S 为对应转动副、移动副、圆柱副和球面副的数目。 对于所研究的机构,(1)式中各种运动副的数目受到一定的限制。 因一个球面副有三个自由度,所以机构中应含有的球面的数目应为P S 2,当P S=2时(即机构中含有双球面副构件),这时,机构将存在一个局部自由度。 而一个圆柱副具有二个自由度,所以机构中应含有的圆柱副的数目为P C 3。 对于由移动副和转动副所组成的单自由度,机构中所含的运动副数目应为P1 7。 满足上述三个关系式以及P S、P C、P1的约束条件的各类运动副的个数有九种组合方式(见表1)。 表1 机构的九种组合方式 123456789 n456734534 P1135702402 P C321021010 P S000011122 F111111122 3 按球面副的数目分类机构 在所研究机构的九种组合中,按球面副P S的数值,还可划分为三种类型:第一种机构P S=0;第二种机构P S=1;第三种机构P S=2。 由表1可见,1、2、3、4组合属于第一类机构,5、6、7组合属于第二类机构,而8、9组合属于第三类机构。 4 按运动副的结构型式分类机构 由表1可知,所研究的机构按各类运动副的个数不同可得九种组合方式,而由于每一类运动副又可取多种结构型式,如 类副有转动副、移动副等型式,因此,对于 =6的单封闭形机构实有更多的组成方案。为了便于分析研究,我们将所研究的机构分为型、种。所谓型是指表1中的每一种组合方式用具体的运动副代号替换所得的形式称为各型机构。根据移动副数目的不同,表1中的组合经替 51 机械工程师 1996 5 第二章连杆机构 2.1试绘制出图(1)所示机构的运动简图,并说明它们各为何种机构。 图(1) 2.2图(2)所示四铰链运动链中,已知各杆件长度l AB=55mm,l BC=40mm,l CD=50mm,l AD=25mm。(1)该运动链中是否具有双整转副构件? (2)如果具有双整转副构件,则固定哪个构件可获得曲柄摇杆机构? (3)固定哪个构件可获得双曲柄机构? (4)固定哪个构件可获得双摇杆机构? 图(2) 2.3在图(3)所示的铰链四杆机构中,各杆件长度分别为l AB=28mm, l AD=52mm,l CD=50mm, l AD=72mm。 (1)若取AD为机架,求该机构的极位夹角θ,杆CD的最大摆角φ和最小传动角γmin ;(2)若取AB为机架,该机构将演化为何种类型的机构?为什么?请说明这时C、D两个转动副是整转副还是摆动副? 图(3) 2.4对于一偏置曲柄滑块机构,试求: (1)当曲柄为源动件时机构传动角的表达式; (2)试说明曲柄r,连杆l和偏距e对传动角的影响; (3)说明出现最小传动角时的机构位置; (4)若令e=0(即对心曲柄滑块机构),其传动角在何处最大?何处最小? 2.5图(5)所示为六杆机构。已知l AB=200mm, l AC=585mm, l CD=300mm, l DE=700mm,A C⊥EC,ω1为常数。试求: (1)机构的行程速度变化系数; (2)机构5的冲程H; (3)机构最大压力角αmax发生的位置及大小; (4)在其它尺寸不变的情况下,欲使冲程为原冲程的2倍,问曲柄长度应为多少? 图(5) 2.6试求图(6)所示连杆机构中构件4与构件2的角速度比ω4/ω2。 图(6) 2.7在图(7)所示的机构中,已知曲柄2顺时针方向匀速转动,角速度ω2=100rad/s,试求在图示位置导杆4的角速度ω4的大小和方向。 平面连杆机构的运动分析(题号:平面六杆机构) 一、题目说明 图示为一平面六杆机构。设已知各构件的尺寸如表1所示,又知原动件1以等角速度ω1=1 rad/s沿逆时针方向回转,试求各从动件的角位移、角速度及角加速度以及E点的位移、速度及加速度的变化情况。 已知其尺寸参数如下表所示: 二、题目分析 1、建立封闭图形: L 1 + L 2= L 3+ L 4 组 号 1l l 2 l 3 l 4 l 5 l 6 α A B C 2-A 2-B 2-C 26.5 67.5 87.5 52.4 43.0 60 l 2=116.6 l 2=111.6 l 2=126.6 L 1 + L 2= L 5+ L 6+AG 2、机构运动分析: a 、角位移分析 由图形封闭性得: ??? ???? ?-?+=+-?-?+??-?+=+-?-?+??=?+?+?=?+?55662'2221155662'22211 3322114332211sin sin )sin(sin sin cos cos )cos(cos cos sin sin sin cos cos cos θθθαπθθθθθαπθθθθθθθθL L y L L L L L x L L L L L L L L L L G G 将上式化简可得: ??? ???? =?-?+-?+?-=?-?+-?+??-=?-??-=?-?G G y L L L L L x L L L L L L L L L L L 66552'233466552'233 1133221143322sin sin )sin(sin cos cos )cos(cos sin sin sin cos cos cos θθαθθθθαθθθθθθθθ b 、角速度分析 上式对时间求一阶导数,可得速度方程: 化为矩阵形式为: 第五讲 平面连杆机构及其设计 连杆机构的传动特点: 1.因为其运动副一般为低副,为面接触,故相同载荷下,两元素压强小,故可承受较大载荷;低副元素便于润滑,不易磨损;低副元素几何形状简单,便于制造。2.当原动件以同样的运动规律运动时,若改变各构件的相对长度,可使从动件得到不同的运动规律。3.利用连杆曲线满足不同的规矩要求。4.增力、扩大行程、实现远距离的传动(主要指多杆机构)。 缺点: 1.较长的运动链,使各构件的尺寸误差和运动副中的间隙产生较大的积累误差,同时机械效率也降低。2.会产生系统惯性力,一般的平衡方法难以消除,会增加机构动载荷,不适于高速传动。 平面四杆机构的类型和应用 一、平面四杆机构的基本型式 1.曲柄摇杆机构2.双曲柄机构 3.双摇杆机构 二、平面四杆机构的演化型式 1.改变构件的形状和运动尺寸 曲柄摇杆机构 -----曲柄滑块机构 2.改变运动副的尺寸 偏心轮机构可认为是将曲柄滑块机构中的转动副的半径扩大,使之超过曲柄的长度演化而成的。 3.选用不同的构件为机架 (a ) 曲柄滑块机构 (b )AB第8章 第6讲 平面多杆机构和空间连杆机构简介
机械原理四连杆门座式起重机
空间连杆机构
机械原理连杆机构设计和分析5
哈工大机械原理考研-第2章 连杆机构分析与设计(理论部分)
空间连杆机构在机械系统的应用
山东理工大学机械原理考试原题目——四杆机构的设计
单自由度空间单封闭连杆机构的结构类型综合
机械原理课后习题集 第二章 连杆机构
机械原理大作业平面连杆机构报告
机械原理 平面连杆机构及其设计讲义
相关主题
文本预览