
文件指定默认存储位
新建
打开
最近
帮助
退出
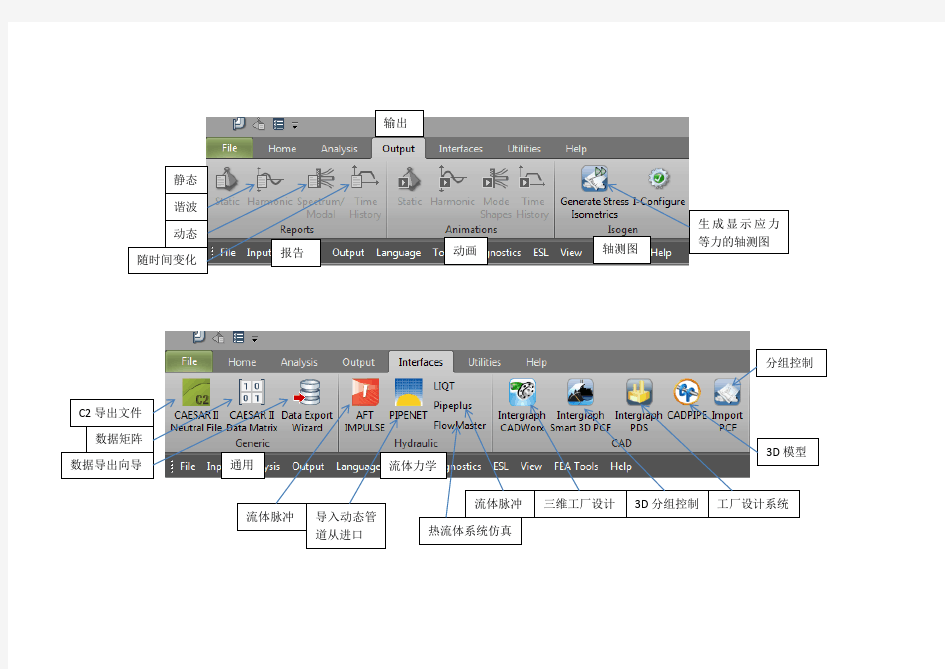
动画
轴测图
生成显示应力等力的轴测图
分组控制
设置公制单位:点弹出下框。文件名可以为字母、数字(中文名称生成轴测图时会有问题)
钢结构数据输入
管道数据输入
存储位置
取消
打开下拉帘并选mm
节点号的字体大小:
图形区右键→Porperties →Display Options →Fonts →Nodes →设置后按Apply 应用
图形区右侧复制按钮,左侧
为全局坐标,用于复制后定位坐标。即与原图的位置关系。
详细程度不同的三种应力报告
生成Excel表格报告
点击生成报告
1.查看报告:一次应力选中SUS,过来旁
边选Strsses Summary,再点查看;支
架推力选中OPE-Restraint Summary再点
查看按钮。
2.需要调整数据点进到输入界面。
3.输出报告:选中SUS-Strsses Extended
点;
选中OPE-Restraint Summary Extended点
(可以添加多种工况);可以选
生成word文档报告点。
实例3安装态持续载荷
实例4热胀载荷
管道规范:B31.3 最大应力
应力检查通过,如不通过则显示:CODE STRESS CHECK FAILED
载荷工况3 W+P1 表示综合应力(Code Stress)
占许用应力(Allowable Stress)
的百分比
轴向应力值
弯曲应力值
扭转应力值
环向应力值
应力峰值
完全固定的约束
还可以生成轴测图,在图中生动的表示各点的受力情况、支架的载荷等。 ① 回到主页→Home 点
图标,弹出一个新界面;
② ③ 勾选节点号后点显示计算结果
④ 点击
BIOS(基本输入输出系统)完全解读 -------------------------------------------------------------------------------- 前一阵子造成全球多处电脑严重受损的CIH病毒大家还应当记忆尤新吧。CIH病毒就是破坏了主板的BIOS,使得BIOS不能正常工作,不能完成电脑启动(POST)时硬件自检、配置和引导,逼着我们更换BIOS或整个主板才罢休,所以此病毒很厉害,从而也证明BIOS 在电脑中的重要地位!那么这就要求我们首先要了解BIOS,知己知彼百战不殆吗!那么BIOS 它到底是什么?是怎样工作的?怎样对它进行正确的设置…… BIOS的基本概念 BIOS大家关注过它吗?其实每当你按下机箱上的po wer键时,它就认认真真的为你工作了。那么什么是BIOS呐?书本上给了我们一个定义:“BIOS是Basic Input-output System(基本输入输出系统)的缩写,它负责开机时对系统的各项硬件进行初始化设置和测试,以确保系统能够正常工作。若硬件不正常则立即停止工作,并把出错的设备信息反馈给用户。BIOS包含了系统加电自检(POST)程序模块、系统启动自举程序模块,这些程序模块主要负责主板与其它计算机硬件设备通讯的作用。” ——晕,两个字——糊涂!(呵J呵)其实简单的说BIOS就是被“固化”在计算机硬件中的一组程序,它为你的计算机提供最低级的、最直接的硬件控制。BIOS实际上相当于计算机硬件与软件程序之间的一座桥梁,它本身其实就是一个程序也可以说是一个软件。我们对它最直观的认识就是POST(Power On System Test)功能,当计算机接通电源后,BIOS将进行检验其内部所有设备的自检,包括对CPU、内存、只读存储器、系统主板、CMOS存储器、并行和串行通信子系统、软盘和硬盘子系统以及键盘进行测试。自检测试完成后,系统将在指定的驱动器中寻找操作系统,并向内存中装入操作系统。(哈哈^_*,这下清楚许多了吧。) CMOS是什么? BIOS程序存放在电脑的什么地方呐?它的安乐窝就是CMOS存储器,CMOS是complementary metal-oxide semiconductor的首写字母缩写,中文就是互补金属氧化物半导体,它是一种半导体技术,可以将成对的金属氧化物半导体场效应晶体管(MOSFET)集成在一块硅片上。该技术通常用于生产RAM和交换应用系统,用它生产出来的产品速度很快功耗极低,而且对供电电源的干扰有较高的容限。具体到我们这是指电脑主机板上一块
基本輸入/輸出系統(BIOS)研究 指導老師: 陳德生 學生 : 楊逸翔 曾成濱 班級 : 資訊四甲
目錄 目錄................................................................................................................................I 摘要.............................................................................................................................III 致謝.............................................................................................................................IV 第一部份 x86基本硬體架構.. (1) Chapter 1 基本輸入/輸出系統(BIOS) -Introduction (1) 1.1什麼是 BIOS? (2) 1.2 BIOS in ROM (3) 1.3 執行BIOS的目的與基本流程 (3) Chapter 2 重要之硬體介紹 (5) 2.1 主要的集成電路(IC) (6) 2.1.1 中央處理器(CPU) (6) 2.1.2 晶片組(Chip-set) (8) 2.1.3 整合中低速率介面(Super I/O) (9) 2.1.4 鍵盤控制器(Keyboard Controller) (9) 2.1.5 CMOS(RTC/CMOS 計時/參數晶片) (11) 2.1.6 其它一般IC (11) 2.2 匯流排系統(BUS System) (12) 2.2.1 週邊元件介面匯流排PCI (Peripheral Component Interface Bus)12 2.2.2 系統管理匯流排SMBus (System Management Bus) (13) 2.2.3 低針腳數LPC (Low pin count) (14) 2.2.4 GP I/O(General Purpose I/O) (14) 2.3 電源管理(Power management) (14) 2.3.1 系統管理模式SMM (System Management Mode) (14) 2.3.2 進階電源管理APM (Advanced Power Management) (15)
BIOS(基本输入/输出系统)是被固化在计算机CMOS RAM芯片中的一组程序,为计算机提供最初的、最直接的硬件控制。BIOS主要有两类∶AWARD BIOS和AMI BIOS。正确设置BIOS可大大提高系统性能。 第一部分、AWARD BIOS设置 一、进入 BIOS 设置 电脑刚启动,出现如下图1画面时。 图1 当出现图1画面时,按下Delete(或者Del)键不放手直到进入BIOS(基本输入/输出系统)设置,如下图2 图2(主菜单) 上图是AWARD BIOS设置的主菜单。最顶一行标出了Setup程序的类型是Award Software 。项目前面有三角形箭头的表示该项包含子菜单。主菜单上共有13个项目,分别为∶ Standard CMOS Features(标准CMOS功能设定) 设定日期、时间、软硬盘规格及显示器种类。 Advanced BIOS Features(高级BIOS功能设定) 对系统的高级特性进行设定。
Advanced Chipset Features(高级芯片组功能设定) 设定主板所用芯片组的相关参数。 Integrated Peripherals(外部设备设定) 使设定菜单包括所有外围设备的设定。如声卡、Modem、USB键盘是否打开... Power Management Setup(电源管理设定) 设定CPU、硬盘、显示器等设备的节电功能运行方式。 PNP/PCI Configurations(即插即用/PCI参数设定) 设定ISA的PnP即插即用介面及PCI介面的参数,此项仅在您系统支持PnP/PCI时才有效。 Frequency/Voltage Control(频率/电压控制) 设定CPU的倍频,设定是否自动侦测CPU频率等。 Load Fail-Safe Defaults(载入最安全的缺省值) 使用此菜单载入工厂默认值作为稳定的系统使用。 Load Optimized Defaults(载入高性能缺省值) 使用此菜单载入最好的性能但有可能影响稳定的默认值。 Set Supervisor Password(设置超级用户密码) 使用此菜单可以设置超级用户的密码。
输入输出系统
输入输出系统 输入输出系统是计算机系统中的主机与外部进行通信的系统。它由外围设备和输入输出控制系统两部分组成,是计算机系统的重要组成部分。外围设备包括输入设备、输出设备和磁盘存储器、磁带存储器、光盘存储器等。从某种意义上也可以把磁盘、磁带和光盘等设备看成一种输入输出设备,所以输入输出设备与外围设备这两个名词经常是通用的。在计算机系统中,通常把处理机和主存储器之外的部分称为输入输出系统,输入输出系统的特点是异步性、实时性和设备无关性。 输入输出系统-原理 CPU
从信息传输速率来讲,相差也很悬殊。如果把高速工作的主机同不同速度工作的外围设备相连接,保证主机与外围设备在时间上同步要讨论的外围设备的定时问题。 输入/输出设备同CPU交换数据的过程: 输入过程: (1)CPU把一个地址值放在地址总线上,这一步将选择某一输入设备; (2)CPU等候输入设备的数据成为有效; (3)CPU从数据总线读入数据,并放在一个相应的寄存器中。 输出过程: (1)CPU把一个地址值放在地址总线上,选择输出设备; (2)CPU把数据放在数据总线上; (3)输出设备认为数据有效,从而把数据取走。输入输出系统-定时方式
网络模型 由于输入/输出设备本身的速度差异很大,因此,对于不同速度的外围设备,需要有不同的定时方式,总的说来,CPU与外围设备之间的定时,有以下三种情况。 1.速度极慢或简单的外围设备 对这类设备,如机械开关、显示二极管等等,CPU 总是能足够快地作出响应。换句话说,对机械开关来讲,CPU可以认为输入的数据一直有效,因为机械开关的动作相对CPU的速度来讲是非常 慢的,对显示二极管来讲,CPU可以认为输出一定准备就绪,因为只要给出数据,显示二极管就能进行显示,所以,在这种情况下,CPU只要接收或发送数据就可以了。 2.慢速或中速的外围设备
System Input Action 内的功能: 1 、Motors On :伺服使能Or,和控制柜上电机开启是一样的功能; 2、Motors Off :伺服使能Off ,机器人控制器会在状态变化前停止; 3、Star t :启动,机器人程序启动,和示教器上启动按钮功能一致; 4、Start at main :在主程序启动,机器人从主程序从头开始并启动; 5、Stop :停止,机器人程序停止,和示教器上停止按钮功能一致; 6、Quick Stop :快速停止,机器人程序、本体快速停止,和Stop 不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样; 7、Soft Stop:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止; 8、Stop at end of cycle :程序在执行完整个循环时停止; 9、Interrupt :中断,触发机器人中断程序; 10、Load and start :从大容量存储装置中载入一段RAPID程序然后启动; 11、Reset Emergency stop :复位紧急停止,仅在硬件急停没在按下的情况下有效; 12、Reset Execution Error Signal :复位并输出出错信号; 13、Motors On and Start :电机使能并启动程序; 14、Stop at end of Instruction :程序会在执行完当前指令后停止; 15、System Reset :重启系统; 16、Load:从大容量存储装置中载入一段RAPID程序; 17、Backup:备份,把当前系统内数据、参数备份; 18、SimMode模拟模式; 19、Disable backup :避免启动一次备份; 20、Limit Speed :极限速度,降低机器人运动速度; 21、PP to Ma in : PP移至Mai n,与示教器上调试的选项一致; 22、Collision Aviodance :激活碰撞避免,仅适用于IRB14000; 23、Write Access :获得写权限; 24、Enable Energy Saving :启动节能模式; System Output Status 内的功能: 1、Motor On:当电机使能为On时输出; 2、Motor Off :当电机使能为Off 时输出; 3、Cycle On :执行机器人程序时输出; 4、Emergency Stop :当紧急停止被触发时输出; 5、Auto On:自动运行时输出; 6、Run chain Ok :安全链链OK 7、TCP Speed TCP运行速度的模拟信号; 8、Execution Error :报警出错时输出; 9、Motor On State :电机在启动状态; 10、Motor Off State :电机在关闭状态; 11、Power Fair Error :程序无法在上电失败后从当前位置继续执行时输出; 12、Motion Supervision Triggered :触发运动监控; 13、Motion Supervision On :运动监控启动; 14、Path return Region Error :系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;