Full-Featured Remote Control Through Standard Internet Connections
The TDS3000B Series oscilloscopes are uniquely equipped for many remote control applications due to their e*Scope ?Web-based remote control capability.This feature effectively integrates the TDS3000B oscilloscope with any PC through an Internet or intranet connection.e*Scope provides access to all front panel controls on the oscilloscope,as well as displaying a faithful reproduction of the oscilloscope’s screen.No special interfaces or application packages are required.
Getting Started: How to Activate e*Scope Remote Control
The core features that make e*Scope remote control possible are the TDS3000B oscilloscope’s built-in Ethernet port,its ability to store an IP (Internet Protocol) address (the oscilloscope’s unique identity on the Internet),and special internal browser pages that appear when the TDS3000B starts up.
Two e*Scope operating modes are available:basic and advanced.The basic mode relies on resources housed entirely within the oscilloscope.It serves the Home,Data,Status,and Configure pages directly to the connected PC via the internet,an intranet connection,or a hardwired Ethernet https://www.doczj.com/doc/394909339.html,ing the basic mode,you can display waveforms,send commands,and upload or download waveform and setup files
by typing in commands on the Data page.
e*Scope ?Remote Control Puts
Network-Connected Oscilloscope on Your PC Desktop
Imagine an oscilloscope that you can connect to your prototype in the lab, then operate from your desk in another building. Or one that lets your factory experts personally supervise—without ever leaving their benches—measurements by field technicians troubleshooting equipment. The TDS3000B Series of digital phosphor oscilloscopes with e*Scope remote control transforms this vision into a reality.
Easy to Use Web-based Remote Control
Application Note
Following is a brief procedure to get your e*Scope remote functions up and running:
1.Get an IP address for the instrument:From your organization’s network
administrators,get an address for the specific TDS3000B instrument.An IP address contains 4 sets of up to three numbers,separated by periods
(i.e.128.181.240.94).
2.Store the IP address in your TDS3000B:Go to your oscilloscope’s front panel and select menu options in this order:Utility,System,I/O,Ethernet Settings,Change Ethernet Settings.The address menu is shown in Figure 2.
3.
Select a control method that meets your needs:If your PC is connected to the Internet and your oscilloscope and PC are on the same side of your company’s firewall,proceed with either the basic or advanced control method.Method 1: Basic Control Option
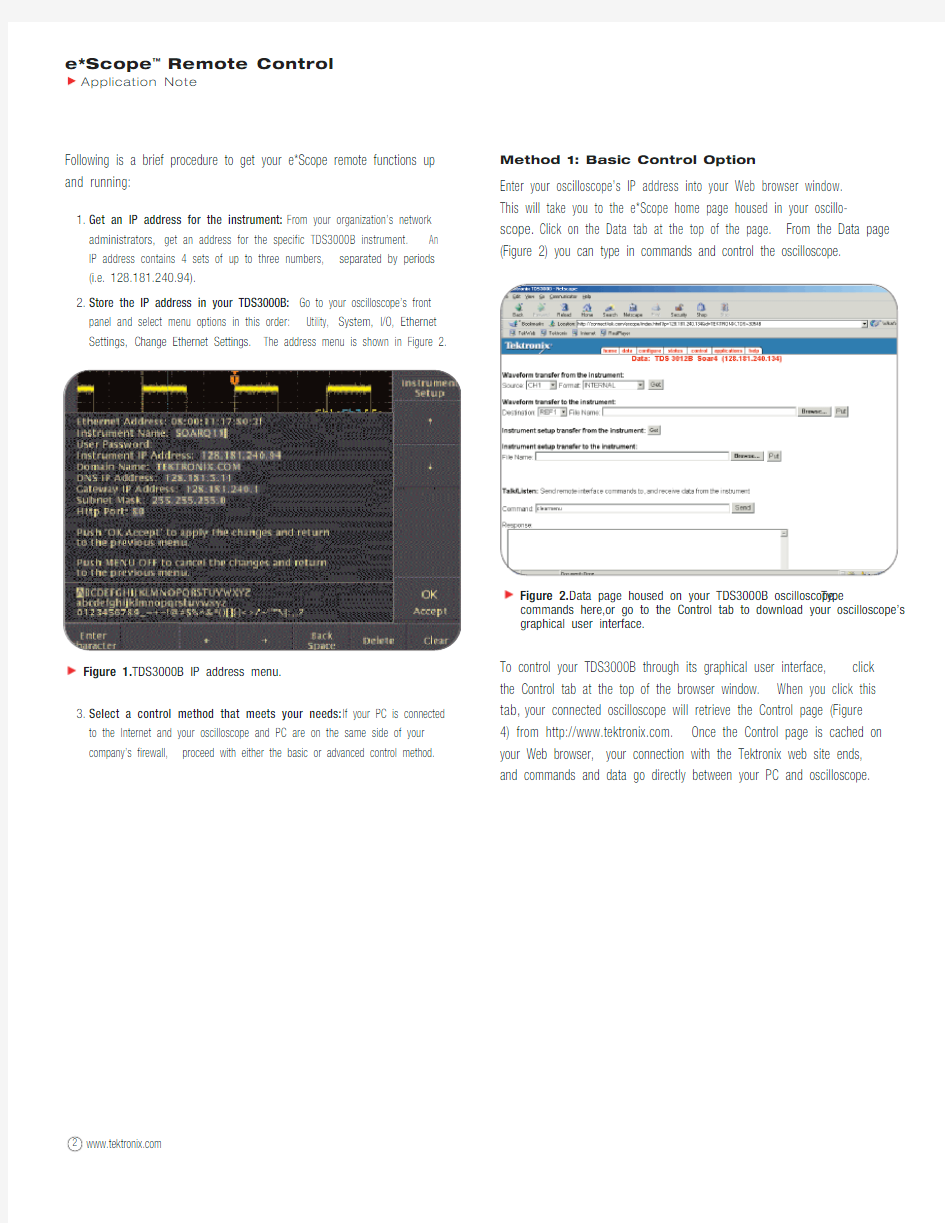
Enter your oscilloscope’s IP address into your Web browser window. This will take you to the e*Scope home page housed in your oscillo-scope.Click on the Data tab at the top of the page.From the Data page (Figure 2) you can type in commands and control the oscilloscope.
To control your TDS3000B through its graphical user interface,click the Control tab at the top of the browser window.When you click this tab,your connected oscilloscope will retrieve the Control page (Figure 4) from https://www.doczj.com/doc/394909339.html,.Once the Control page is cached on your Web browser,your connection with the Tektronix web site ends, and commands and data go directly between your PC and oscilloscope.
e*Scope?Remote Control Application Note
Figure 1.TDS3000B IP address menu.Figure 2.Data page housed on your TDS3000B oscilloscope.Type commands here,or go to the Control tab to download your oscilloscope’s graphical user interface.
Method 2: Advanced Control Option
From your browser,go to https://www.doczj.com/doc/394909339.html,/escope.Enter your oscilloscope’s IP address as shown in Figure 3.This will take you to the e*Scope home page housed in your oscilloscope.Click the Control tab at the top of the page.Your oscilloscope will then retrieve the Control page,as described in the previous paragraph.The Control page reproduces the oscilloscope’s graphical user interface.From its own internal perspective,the remote oscilloscope sees e*Scope commands as GPIB instructions.But neither the oscilloscope nor the controlling PC require a separate GPIB interface.e*Scope’s standard command set encompasses all front panel controls and display settings. In addition,the e*Scope Data page provides a means to execute any valid GPIB instruction by typing in text strings on the Data page.
The common foundation of e*Scope operation is connectivity and communication through conventional network protocols,including the Internet.e*Scope relies on standard Web browsers and conventional Internet data transactions.Various networking paths between the PC, the oscilloscope and the remotely served Control page are possible, giving you complete independence from the https://www.doczj.com/doc/394909339.html,/escope home page if preferred.The initial e*Scope connection is just one of several ways to connect and control the TDS3000B with e*Scope. Operating a remote TDS3000B oscilloscope with e*Scope has a com-parable “look and feel”to interacting with any dynamic Web site.It is this characteristic that makes e*Scope so powerful and easy to use.
e*Scope?Remote Control
Application Note Figure 3.
https://www.doczj.com/doc/394909339.html,/escope.
Figure 4.Control page from https://www.doczj.com/doc/394909339.html,/escope cached on your
Internet https://www.doczj.com/doc/394909339.html,ing your mouse or computer keyboard,you can control
your oscilloscope.
Networking Considerations and Firewall Issues All of the networking configurations depicted in this document are simplified to the extent that they do not show a firewall between
the oscilloscope and the PC that controls it.In the real world,most institutions have firewalls designed to resist intrusion.These require special arrangements before they will admit e*Scope instructions coming from the outside.In many companies,networks within the company itself may be separated by firewalls.
If your PC and oscilloscope are on opposite sides of your organization’s firewall,see your network administrator to find a suitable solution. Following are several common approaches:
A Virtual Private Network (VPN)makes the external PC appear as if it is attached to the internal enterprise LAN.This allows your network administrators to supervise and control the connection between your oscilloscope and the external computer.
A Reverse Proxy makes the oscilloscope look like it is outside the fire-wall.To the external PC,the oscilloscope appears to be on the Internet at a special URL.
The Port Forwarding approach forwards the port for the server outside the firewall.The oscilloscope’s IP address becomes the IP address of the gateway.In some cases,you will need to change the oscilloscope’s http port number to something other than its default 80 to prevent conflicts with other Web servers with the same default gateway address.Integrating e*Scope Remote Control Into Your Environment
The preceding "Getting Started" section has outlined some simple ways to get e*Scope remote control running for the first time.This section will go into more detail about the several possible networking layouts for e*Scope.The simplest connection requires only a crossover Ethernet cable,while the more flexible configurations require you to connect to the instrument at its own unique IP address via the Internet.
Using e*Scope Without a Network
The fastest and simplest way to implement e*Scope remote control
is to connect the TDS3000B oscilloscope directly to a computer with a standard "null modem" ethernet cable,as shown in Figure 5,or through a hub.Both the PC and the instrument need to be set up on the same subnet in this simple connection.You can assign an address to the TDS3000B through its Utility menu.
e*Scope?Remote Control
Application Note
Figure 5.e*Scope can be set up for text-based commands via remote
control without a network connection.
The TDS3000B contains its own e*Scope Data page on which you can enter remote programming commands in text form.When you go to http://
This home page resides within your TDS3000B.You can control the oscilloscope’s modes,ranges,and measurements,view the results, and using the right-click on your mouse,print or store the screens you see on your PC.
Initial Network Connection
Figure 6 shows the "initial" network connection for e*Scope operation. It begins with a connection to the Tektronix e*Scope Web site,which provides a full-featured graphical remote control interface.It is also the starting point for the other e*Scope networking configuration approaches.When you submit an IP address on the e*Scope login page,the
e*Scope server sends to your PC a group of control pages for your TDS3000B.This initial e*Scope connection delivers graphical control over the full range of TDS3000B features:
Uncompromised,remote control of the oscilloscope,just as though
you were operating it from the front panel.
Duplication of the TDS3000B screen on your PC screen,including
the same active,"clickable" menus.
Every knob and button has an equivalent clickable control on
the PC screen.
In this configuration,the Control page resides in your computer’s browser cache.After closing a session,you can resume operation immediately if your browser has not cleared its cache,or you can quickly restore the cache by visiting https://www.doczj.com/doc/394909339.html,.
The initial network connection is efficient and easy to use.Response times to the commands you send from the cached pages are similar to the same actions executed in the direct connection described earlier.
e*Scope?Remote Control
Application Note
Figure 6.The e*Scope initial network connection provides a graphical interface for a remote control session.The Control page is cached locally while the Application and Help pages are served on demand from the Tektronix e*Scope site.
Installing and Running the e*Scope Control Pages on a Remote PC
Some TDS3000B users may find it more efficient to serve their own copy of the e*Scope Login and Control pages from a PC or network server rather than going through the Tektronix site for each session.The e*Scope pages are available,free,to all TDS3000B users through the Tektronix e*Scope Web site (https://www.doczj.com/doc/394909339.html,/escope).The flow of information and commands is shown in Figure 7.The Tektronix e*Scope Web site provides the Login page and Control page in executable form.Unlike the cached browser pages,they are permanently stored on your own PC,eliminating the need to contact the Tektronix Web site when you want to control a remote TDS3000B oscilloscope.
Even in this downloaded,locally-stored configuration,the Application and Help pages are always served by the Tektronix Web site.Selecting the tabs for these pages redirects your inquiry to the Tektronix site,which serves them to your PC.The tabs are inactive when the TDS3000B is not connected to the Internet.
To use the locally served configuration,visit the e*Scope site,register,and download the e*Scope Login and Control pages.These are provid-ed in a compressed,self-extracting (.ZIP) file that appears as an icon on your PC desktop.Double-click on this file to install it.
Launching e*Scope after it is stored on your local PC is identical to starting up any other Windows application.When e*Scope is launched,it opens your browser and prompts you for the IP address of the remote TDS3000B oscilloscope.
e*Scope ?Remote Control
Application Note
Figure 7.The e*Scope Login and Control pages can be downloaded to the user’s PC for permanent installation there.After the first use,it is no longer necessary to connect to the Tektronix website for these resources; instead,they are served by the PC.
Controlling A TDS3000B Oscilloscope
on your Network
To control a remote TDS3000B oscilloscope from any PC on a network, download a copy of the e*Scope Login and Control pages and place them on your own enterprise network server.Your server will then deliver the pages to PCs on your network as needed.Your server houses the Web site that e*Scope users within your enterprise contact to operate their TDS3000B oscilloscopes remotely or acquire cached copies of the Login and Control pages.
The connection and the information flow is depicted in Figure 8.
The procedure for installing the pages is the same as that used to download the application for a single-PC configuration,with the following exceptions:
The install file will create a directory for the pages and store them there.
Subsequently,you will invoke only this address directly to access
the Login and Control pages.
e*Scope?Remote Control
Application Note Figure 8.e*Scope pages can be housed and served from your own network server.
Overview of e*Scope Web Pages
The e*Scope application is designed to work within your Web browser just as any other Web page would,appearing as a set of graphical pages that include active links,text entry boxes,and other HTML conventions.
At the top of every e*Scope page,there is a navigation bar with six tabs.On the Login page,the tabs are not active.On any subsequent page,clicking on a tab brings you to a new page with one of the following functions:
The Home page comes up automatically after you log in with an IP address.It shows the current display from the remote oscilloscope. On the Home page,you can set the refresh time (that is,how often your browser checks the remote oscilloscope and sends an update
to your PC screen),but no oscilloscope controls are accessible.
Data is the default page for uploading and downloading waveform files and setups,for entering oscilloscope commands,and for receiving the measurement results in text form.The page does not include a screen display from the remote oscilloscope.
Configure is the page for defining URLs.Essentially it tells the
e*Scope application where to look for the Control,Application,and Help pages.Default URLs stored in the oscilloscope refer the applica-tion to https://www.doczj.com/doc/394909339.html, but this can be changed to direct the instrument to another network server.Status displays the instrument status,including firmware version, application modules installed,and communication modules installed (e.g.RS-232).
Control is the remote front panel,which includes both menus to control the remote oscilloscope,and the display from the oscilloscope screen. Applications links you to TDS3000B application notes and other technical literature on the Tektronix Web site.
Help goes to the Tektronix Web site for assistance with e*Scope
and Frequently Asked Questions (FAQ) about the TDS3000B and its application modules.
e*Scope?Remote Control Application Note
A Closer Look at
the e*Scope Control Page
The Control page is the remote "front panel" for the TDS3000B oscilloscope,where you set the measurement parameters such as vertical and horizontal scale and trigger level,and view an image of the oscilloscope screen,including waveforms,the graticule,cursors, readouts,and menus.A typical Control page view appears in Figure 9.The e*Scope Control screen is divided into two areas in addition to the standard navigation header area:the Display area,which mirrors the actual screen display of the remote oscilloscope; and the Front Panel Menus area,which controls front panel functions not included in the display area.
The browser refreshes the display area automatically.The display itself is the same image you would see on the actual oscilloscope screen. You can activate "soft" buttons that appear within the screen window itself (such as the Horizontal Resolution or the Wfm Anomaly Detection On/Off button in Figure 9) by mouse-clicking on the screen.
The oscilloscope’s "hard" controls (electromechanical buttons and knobs on the front panel) are operated by selecting and clicking on their equivalently-named tabs appearing in red text in the lower menu. The Subsystem and General Purpose menus are always visible. Figure 9 is a full Control page view,including the Vertical control menu. This is a result of clicking on the "VERT" tab under the subsystem menu. Each of the five subsystems brings up its own menu.One menu can be displayed at a time.Table 1 outlines the functions available via
the front panel menus area of the e*Scope Control page.Together,
the display area controls and the front panel menus encompass every TDS3000B control function.
In Figure 9,note the triangular symbols in the Pos,Scale,and General Purpose menus.These are the on-screen surrogates for front-panel rotary knob functions.With each mouse click,the Vertical and Horizontal position controls move the waveform in fractions of a division:±1 Division,±.1 Division,and ±.01 Division for the large,medium, and small triangles respectively.Other functions are scaled as a percent of the range,depending on the control.
e*Scope?Remote Control
Application Note Figure 9.The Control page includes five subsystem menus.The Vertical
menu shown here results from clicking on the "VERT" tab under the
subsystem menu.
e*Scope?Remote Control
Application Note
Table 1: e*Scope On-Screen Remote Controls
Subsystem
Trigger—displays Trigger control panel Vertical—displays Vertical control panel Set to 50%Channel 1
Force Trigger Channel 2
B Trigger Channel 3
Menu Channel 4
Level Increase/Decrease; 1 Div,.1 Div,.01 Div Math
Reference
Menu
Off
Position Up/Down; 1 Div,.1 Div,.01 Div
Scale Increase/Decrease Horizontal—displays Horizontal control panel Miscellaneous—displays all other controls Delay Measure
Zoom Save/Recall
Position Up/Down; 1 Div,.1 Div,.01 Div QuickMenu
Scale Increase/Decrease Hardcopy
Cursor
Display
Menu Off
Acquire—displays Acquire control panel
Run/Stop
Autoset
Single Sequence
Menu
Intensity Increase/Decrease
General Purpose
Select
Coarse
Increase/Decrease
e*Scope?Remote Control
Application Note
e*Scope Applications
e*Scope offers complete front panel equivalency and display capability on a standard PC and browser. It opens up a wealth of applications that have until now required elaborate networking arrangements:
Operate an oscilloscope without leaving the office
e*Scope lets you operate a centrally-located TDS3000B oscilloscope (in an engineering lab, for example) from a location that’s more convenient for your other day-to-day work. By making measurements or observing the progress of a test from your regular office PC, you can accomplish your lab work while staying within easy reach of your telephone, files, and co-workers.
Support field technicians working at customer sites
When field service technicians run into problems at a customer site, your company’s image depends on prompt resolution of those problems. With e*Scope, your best factory technicians and engineers can "look over the shoulder" of the technician making measurements on the customer’s equipment.
Support customers’ in-house maintenance programs
Frequently, customers prefer to handle maintenance and troubleshooting with their own personnel. However, they still need and expect your support when things go wrong, and your response can impact your business relationship with the customer. Here too, e*Scope can put your best factory experts on the case.
Support distributed engineering and manufacturing facilities
Many companies have engineering and manufacturing sites at locations around the world. While this trend brings the product closer to its market or labor resources, it can also make it difficult for engineering to oversee the smooth integration of products into the manufacturing line.
e*Scope gives the designers and evaluation engineers the means to work cooperatively, in real time, with their peers in manufacturing. Together, they can design and verify manufacturing test procedures. In addition, e*Scope gives the design team a way to spot-check the performance of units coming off the production line.
Monitor and modify measurement procedures after business hours
Almost every engineer has spent many evenings at the workbench, running tests on a new design, adjusting the measurement instrument, running more tests, and so on. e*Scope lets you conduct these measurements and make the adjustments from a connected PC at home.
Archive or publish measurement data
e*Scope delivers your TDS3000B measurements to your network-connected PC. Once the results are in your PC, it is easy to store them on an engineering drive, print them, email them, or embed them in a report.
Distance learning for TDS3000B users
e*Scope makes the TDS3000B an ideal tool for teaching measurement procedures to newly-hired technical personnel at distributors, service offices, and customer sites.
Remote monitoring
In most communities, television stations’ production facilities are located "downtown," while their transmitters are on a hill miles away. These transmitters must be monitored constantly to ensure consistent performance and reliability. The broadcaster’s revenue stream depends on it.
Similarly, many functions within wireless mobile phone base stations lend themselves to remote monitoring if problems are suspected. Quality of Service programs depend on peak performance from this distant equipment.
A TDS3000
B series oscilloscope at the transmitter site can be quickly and easily checked from a networked engineering P
C in the production facility or central office. Should problems be suspected, the TDS3000B can be set up for different measurements or ranges to pinpoint the problem.
e*Scope ?Remote Control
Application Note
Copyright ? 2001,Tektronix,Inc.All rights reserved.Tektronix products are covered by U.S.and foreign patents,issued and https://www.doczj.com/doc/394909339.html,rmation in this publication supersedes that in all previously published material.Spec ific ation and pric e c hange privileges reserved.TEKTRONIX and TEK are registered trademarks of Tektronix,Inc.All other trade names referenced are the service marks,trademarks or registered trademarks of their respective companies.07/01 HMH/XBS
3GW-14924-0
For Further Information
Tektronix maintains a comprehensive, constantly expanding
collection of application notes, technical briefs and other resources to help engineers working on the cutting edge of technology.Please visit “Resources For You” on our Web site at
https://www.doczj.com/doc/394909339.html,
Contact Tektronix ASEAN Countries (65) 356-3900
Australia & New Zealand 61 (2) 9888-0100Austria,Central Eastern Europe,Greece,Turkey,Malta & Cyprus +43 2236 8092 0
Belgium +32 (2) 715 89 70
Brazil and South America 55 (11) 3741-8360
Canada 1 (800) 661-5625Denmark +45 (44) 850 700Finland +358 (9) 4783 400
France & North Africa +33 1 69 86 81 81
Germany +49 (221) 94 77 400Hong Kong (852) 2585-6688
India (91) 80-2275577Italy +39 (02) 25086 501
Japan (Sony/Tektronix Corporation)81 (3) 3448-3111Mexico,Central America & Caribbean 52 (5) 666-6333
The Netherlands +31 23 56 95555
Norway +47 22 07 07 00
People’s Republic of China 86 (10) 6235 1230
Poland (48) 22 521 5340
Republic of Korea 82 (2) 528-5299
South Africa (27 11) 254-8360
Spain & Portugal +34 91 372 6000
Sweden +46 8 477 65 00Switzerland +41 (41) 729 36 40
Taiwan 886 (2) 2722-9622
United Kingdom & Eire +44 (0)1344 392000
USA 1 (800) 426-2200
For other areas,contact:Tektronix,Inc. at 1 (503) 627-1924
赛区评阅编号(由赛区组委会填写): 2016年高教社杯全国大学生数学建模竞赛 承诺书 我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。 料 我们的报名参赛队号(12位数字全国统一编号): 参赛学校(完整的学校全称,不含院系名): 参赛队员 (打印并签名) :1. 2.
3. 指导教师或指导教师组负责人 (打印并签名): (指导教师签名意味着对参赛队的行为和论文的真实性负责) 日期:年月日 送全国评阅统一编号(赛区组委会填写): 全国评阅随机编号(全国组委会填写): (请勿改动此页内容和格式。此编号专用页仅供赛区和全国评阅使用,参赛队打印后装订到纸质论文的第二页上。注意电子版论文中不得出现此页。)
系泊系统的设计和探究 摘要 本文利用牛顿力学定律,力矩平衡原理、非线性规划、循环遍历法等方法对系泊系统进行了设计与探究。通过对系泊系统各组件和浮标运用牛顿经典力学体系进行分析,得到了各个情况下的钢桶倾斜角度、锚链状态、浮标吃水深度和游动区域。 ?, 。当风 对于第二问,求解当海面风速为36m/s时,浮标的吃水深度和游动区域、钢桶以及钢管的倾斜角度和锚链形态。利用第一问中的力学方程和程序,求得钢桶的倾角为19.5951?和四节钢管的倾斜角度依次为19.756?、19.755?、19.916?、20.076?。浮标的游动区域为以锚在海面上的投影为圆心,半径为18.8828m的圆。由于部分数据与问题二中钢桶的倾斜角度不超过5?,锚链在锚点与海床的夹角不超过16?的要求不符,所以通过调节重物球的质量使钢桶的倾斜角度和锚链在锚点与海床的夹角处在要求的范围之内。借助MATLAB程序中的循环遍历法,可以求得重物球的质量3770kg。
一、对等网简介 “对等网”也称“工作组网”,那是因为它不像企业专业网络中那样是通过域来控制的,在对等网中没有“域”,只有“工作组”,这一点要首先清楚。正因如此,我们在后面的具体网络配置中,就没有域的配置,而需配置工作组。很显然,“工作组”的概念远没有“域”那么广,所以对等网所能随的用户数也是非常有限的。在对等网络中,计算机的数量通常不会超过20台,所以对等网络相对比较简单。在对等网络中,对等网上各台计算机的有相同的功能,无主从之分,网上任意节点计算机既可以作为网络服务器,为其它计算机提供资源;也可以作为工作站,以分享其它服务器的资源;任一台计算机均可同时兼作服务器和工作站,也可只作其中之一。同时,对等网除了共享文件之外,还可以共享打印机,对等网上的打印机可被网络上的任一节点使用,如同使用本地打印机一样方便。因为对等网不需要专门的服务器来做网络支持,也不需要其他组件来提高网络的性能,因而对等网络的价格相对要便宜很多。 对等网主要有如下特点: (1)网络用户较少,一般在20台计算机以内,适合人员少,应用网络较多的中小企业; (2)网络用户都处于同一区域中; (3)对于网络来说,网络安全不是最重要的问题。 它的主要优点有:网络成本低、网络配置和维护简单。 它的缺点也相当明显的,主要有:网络性能较低、数据保密性差、文件管理分散、计算机资源占用大。 二、对等网结构 虽然对等网结构比较简单,但根据具体的应用环境和需求,对等网也因其规模和传输介质类型的不同,其实现的方式也有多种,下面分别介绍: 1、两台机的对等网 这种对等网的组建方式比较多,在传输介质方面既可以采用双绞线,也可以使用同轴电缆,还可采用串、并行电缆。所需网络设备只需相应的网线或电缆和网卡,如果采用串、并行电缆还可省去网卡的投资,直接用串、并行电缆连接两台机即可,显然这是一种最廉价的对等网组建方式。这种方式中的“串/并行电缆”俗称“零调制解调器”,所以这种方式也称为“远程通信”领域。但这种采用串、并行电缆连接的网络的传输速率非常低,并且串、并行电缆制作比较麻烦,在网卡如此便宜的今天这种对等网连接方式比较少用。 2、三台机的对等网
系泊系统的设计 摘要 对于问题一,建立模型一,已知题目给出的锚链长度与其单位长度的质量,得到悬链共210环。对各节锚链,钢桶,四节钢管受力分析得出静力平衡方程,使用分段外推法,可以得到静力平衡下的迭代方程。其中锚对锚链的拉力大小方向为输入变量,迭代的输出变量为浮标的位置和对钢管的拉力,在给定的风速下,输入和输出满足关系2)2(25.1cos 水v h T -=α,αθcos cos 11T T =,通过多层搜索算法得出最符合的输入输出值,即可得到给定风速下浮标的吃水深度,浮标拉力、锚链与海床夹角。利用MATLAB 软件编程求解模型得到:风力12m/s 时,钢桶与竖直方向上的角度1.9863度,从下往上四节钢管与竖直方向夹角为1.9652度、1.9592度、1.9532度、1.9472度,浮标吃水0.7173m ,以锚为圆心浮标的游动区域16.5125m ,锚链末端切线与海床的夹角3.8268度。风力24m/s 时,锚链形状,钢桶与竖直方向上的夹角3.9835度,从下往上四节钢管与竖直方向夹角为3.9420度、3.9301度、3.9183度、3.9066度,浮标吃水0.7244m ,以锚为圆心浮标的游动区域18.3175m 。锚链末端切线与海床夹角15.9175度。 对于问题二的第一小问,使用模型一求解,当风速36m/s 时,锚链末端切线与海床夹角26.3339度,浮标吃水0.7482m ,浮标游动区域为以锚为圆心半径为18.9578m 的圆形区域,从下往上四节钢管与竖直方向倾斜角度为8.4463度、8.4225度、8.3989度、8.3753度,钢桶与竖直方向倾斜角度为8.5294度。为满足问题二的要求,在模型一的基础上把重物球质量作为变量,建立模型二,将钢桶倾斜角小于5度和锚链前端夹角小于16度当做两个约束条件,通过MATLAB 编程求解得到满足约束条件要求的重物球质量取值范围为3700kg 到5320kg 。 对于问题三,首先取不同水深、水速、风速三种情况,建立模型三,即在模型一的基础上增加水流对系统产生的影响。在三种情况下,找到合适的锚链型号、锚链长度,重物球质量,对吃水深度、游动区域、钢桶的倾斜角三个目标进行优化达到最小。通过MATLAB 编程实现该模型三得到结果:选用Ⅲ型锚链,锚链长度为27.24m ,重物球质量为2580kg 。 关键词:平面静力系分析 多层搜索算法 遗传算法 逐步外推法 多目标优化
物联网技术与应用 对等网络配置及网络资源共享 实验报告 组员:
1.实验目的 (1)了解对等网络基本配置中包含的协议,服务和基本参数 (2)了解所在系统网络组件的安装和卸载方法 (3)学习所在系统共享目录的设置和使用方法 (4)学习安装远程打印机的方法 2.实验环境 Window8,局域网 3.实验内容 (1)查看所在机器的主机名称和网络参数,了解网络基本配置中包含的协议,服务和基本参数 (2)网络组件的安装和卸载方法 (3)设置和停止共享目录 (4)安装网络打印机 4.实验步骤 首先建立局域网络,使网络内有两台电脑 (1)“我的电脑”→“属性”,查看主机名,得知两台计算机主机名为“idea-pc”和“迦尴专属”。 打开运行输入cmd,进入窗口输入ipconfig得到相关网络参数。局域网使用的是无线局域网。 (2)网络组件的安装和卸载方法:“网络和共享中心”→“本地连接”→“属
性”即可看到网络组件,可看其描述或卸载。 “控制面板”→“卸载程序”→“启用和关闭windows功能”,找到internet 信息服务,即可启用或关闭网络功能。 (3)设置和停止共享目录(由于windows版本升高,加强了安全措施和各种权
限,所以操作增加很多) 使用电脑“idea-pc”。“打开网络和共享中心”→“更改高级选项设置”。将专用网络,来宾或公用,所有网络中均选择启用文件夹共享选项,最下面的密码保护项选择关闭,以方便实验。 分享文件夹“第一小组实验八”,“右键文件夹属性”→“共享”→“共享”,选择四个中的一个并添加,此处选择everyone,即所有局域网内人均可以共享。
系泊系统的设计和探究 This model paper was revised by the Standardization Office on December 10, 2020
赛区评阅编号(由赛区组委会填写): 2016年高教社杯全国大学生数学建模竞赛 承诺书 我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或资料(包括网上资料),必须按照规定的参考文献的表述方式列出,并在正文引用处予以标注。在网上交流和下载他人的论文是严重违规违纪行为。 我们以中国大学生名誉和诚信郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。 我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。 我们参赛选择的题号(从A/B/C/D中选择一项填写): 我们的报名参赛队号(12位数字全国统一编号): 参赛学校(完整的学校全称,不含院系名): 参赛队员 (打印并签名) :1.
2. 3. 指导教师或指导教师组负责人 (打印并签名): (指导教师签名意味着对参赛队的行为和论文的真实性负责) 日期:年月日 (请勿改动此页内容和格式。此承诺书打印签名后作为纸质论文的封面,注意电子版论文中不得出现此页。以上内容请仔细核对,如填写错误,论文可能被取消评奖资格。) 赛区评阅编号(由赛区组委会填写): 2016年高教社杯全国大学生数学建模竞赛 编号专用页 赛区评阅记录(可供赛区评阅时使用): 送全国评阅统一编号(赛区组委会填写): 全国评阅随机编号(全国组委会填写):
对等网络(P2P 一、概述 (一定义 对等网络(P2P网络是分布式系统和计算机网络相结合的产物,在应用领域和学术界获得了广泛的重视和成功,被称为“改变Internet的新一代网络技术”。 对等网络(P2P:Peer to Peer。peer指网络结点在: 1行为上是自由的—任意加入、退出,不受其它结点限制,匿名; 2功能上是平等的—不管实际能力的差异; 3连接上是互联的—直接/间接,任两结点可建立逻辑链接,对应物理网上的一条IP路径。 (二P2P网络的优势 1、充分利用网络带宽 P2P不通过服务器进行信息交换,无服务器瓶颈,无单点失效,充分利用网络带宽,如BT下载多个文件,可接近实际最大带宽,HTTP及FTP很少有这样的效果 2、提高网络工作效率 结构化P2P有严格拓扑结构,基于DHT,将网络结点、数据对象高效均匀地映射到覆盖网中,路由效率高 3、开发了每个网络结点的潜力 结点资源是指计算能力及存储容量,个人计算机并非永久联网,是临时性的动态结点,称为“网络边缘结点”。P2P使内容“位于中心”转变为“位于边缘”,计算模式由“服务器集中计算”转变为“分布式协同计算”。
4、具有高可扩展性(scalability 当网络结点总数增加时,可进行可扩展性衡量。P2P网络中,结点间分摊通信开销,无需增加设备,路由跳数增量小。 5、良好的容错性 主要体现在:冗余方法、周期性检测、结点自适应状态维护。 二、第一代混合式P2P网络 (一主要代表 混合式P2P网络,它是C/S和P2P两种模式的混合;有两个主要代表: 1、Napster——P2P网络的先驱 2、BitTorrent——分片优化的新一代混合式P2P网络 (二第一代P2P网络的特点 1、拓扑结构 1混合式(C/S+P2P 2星型拓扑结构,以服务器为核心 2、查询与路由 1用户向服务器发出查询请求,服务器返回文件索引 2用户根据索引与其它用户进行数据传输 3路由跳数为O(1,即常数跳 3、容错性:取决于服务器的故障概率(实际网络中,由于成本原因,可用性较低。
对等网络的网络弹性分析 摘要:网络弹性研究的是网络在节点失效或被有意攻击下所表现出来的特征。分析Gnutella网络的网络弹性,包括对于随机攻击的容错性和对于选择性攻击的抗攻击性,并与ER模型和EBA模型进行了对比。Gnutella网络对于随机攻击具有很好的容错性,但是对于选择性攻击却显得脆弱。最后对网络弹性进行了理论分析,给出了网络在出现最大集团临界点之前的平均集团大小的公式解。 关键词:对等网络;无标度;网络弹性;脆弱性 中图分类号:TP393.02文献标识码:A 文章编号:1001-9081(2007)04-0784-04 0 引言 在过去的40多年里,科学家习惯于将所有复杂网络看作是随机网络。随机网络中绝大部分节点的连结数目会大致相同。1998年开展的一个描绘互联网的项目却揭示了令人惊诧的事实:基本上,互联网是由少数高连结性的页面串联起来的,80%以上页面的连结数不到4个,而只占节点总数不到万分之一的极少数节点,例如门户网Yahoo和搜索引擎Google等类似网站,却高达上百万乃至几十亿个链接。研究者把包含这种重要集散节点的网络称为无标度网络[1]。
具有集散节点和集群结构的无标度网络,对意外故障具有极强的承受能力,但面对蓄意的攻击和破坏却不堪一击[2]。在随机网络中,如果大部分节点发生瘫痪,将不可避免地导致网络的分裂。无标度网络的模拟结果则展现了全然不同的情况,随意选择高达80%的节点使之失效,剩余的网络还可能组成一个完整的集群并保持任意两点间的连接,但是只要5%―10%的集散节点同时失效,就可导致互联网溃散成孤立无援的小群路由器。 许多复杂网络系统显示出惊人的容错特性,例如复杂通信网络也常常显示出很强的健壮性,一些关键单元的局部失效很少会导致全局信息传送的损失。但并不是所有的网络都具有这样的容错特性,只有那些异构连接的网络,即无标度网络才有这种特性,这样的网络包括WWW、因特网、社会网络等。虽然无标度网络具有很强的容错性,但是对于那些有意攻击,无标度网络却非常脆弱。容错性和抗攻击性是通信网络的基本属性,可以用这两种属性来概括网络弹性。 对等网络技术和复杂网络理论的进展促使对现有对等 网络的拓扑结构进行深入分析。对网络弹性的认识可以使从网络拓扑的角度了解网络的脆弱点,以及如何设计有效的策略保护、减小攻击带来的危害。本文研究Gnutella网络的网络弹性,并与ER模型和EBA模型进行了比较,对比不同类 型的复杂网络在攻击中的网络弹性。当网络受到攻击达到某
实验一建立对等网 一、实验目的 (1)熟悉10BASE-T星型拓扑以太网的网卡、线缆、连接器等网络硬件设备; (2)熟悉WINDOWS中的网络组件及各参数的设置; (3)理解对等网络的特点。 二、实验环境 此实验的基本要求就是两台以上计算机作为一个工作组,连接到一台服务器上,建立一个基于Windows的对等网络,物理结构为10BASE-T以太网。各工作组中的用户可以共享资源。 三、实验内容 (1)网络布线 EIA/TIA的布线标准中规定了两种双绞线的线序568A与568B,分别为: T568A:白绿 | 绿 | 白橙 | 蓝 | 白蓝 | 橙 | 白棕 | 棕 T568B:白橙 | 橙 | 白绿 | 蓝 | 白蓝 | 绿 | 白棕 | 棕 在整个网络布线中应用一种布线方式,但两端都有RJ45端头的网络连线无论就是采用端接方式A,还就是端接方式B,在网络中都就是通用的。实际应用中,大多数都使用T568B的标准,通常认为该标准对电磁干扰的屏蔽更好,本次实习中即采用了端接方式B。 (2)连接网线,建立对等网 连接网线的方式与网卡接口与网络结构有关,本局域网中采用的就是星型结构。以集线器(HUB)为中央结点,网络中所有计算机都通过双绞线连接至集线器,通过集线器交换信息。星型结构的优点就是利用中央结点可方便地提供服务与重新配置网络,单个连接点的故障只影响一个设备;缺点就是每个站点直接与中央结点相连,需要大量电缆,费用较高。 连接好网络线后接通计算机电源,观察网卡后面板上的两只LED工作状态指示灯。绿灯亮表示网络线接通,红灯间接闪烁说明网卡工作正常。 (3)MS-DOS方式中,执行ping命令进行测试
摘要 本题要求观测近海观测网的组成,建立模型对其中系泊系统进行设计,在不同风速和水流的情况下确定锚链,重物球,钢管及浮标等的状态,从而使通讯设备的工作效果最佳。求解的具体流程如下: 针对问题一,分别对系统中的受力物体在水平方向和竖直方向上的力进行分析,找出锚链对锚无拉力时的临界风速,运用力矩平衡求出钢管与钢桶的倾斜角度。对于锚链,将其等效为悬链线模型,根据风速不同判断锚链的状态,从而求出结果。 ?时能够正常工针对问题二,需要调节重物球的质量,使通讯设备在36m m 作。为了确定重物球的质量,首先将实际风速与临界风速进行比较,判断此时系统中各物体的状态,与题目中已知数据进行比较。在钢桶倾斜角度达到临界角度时,计算锚链与海床的夹角并于题中数据进行比较,计算重物球的质量。在浮标完全没入海面时,计算相应条件下重物球的质量,从而确定满足条件的重物球的质量范围。 针对问题三,要求在不同条件下,求出系泊系统中各物体的状态。以型号I 锚链为例,当水流方向与风速方向相同时,系统条件最差,分析在不同水深条件下的系泊系统设计。由题中已知条件确定系统设计的限制条件,对系统各物体进行受力分析,以使整体结果最小,即可得出最优的系泊系统设计。 # 》 关键词:悬链线多目标非线性规划 @
一、问题重述 近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。水声通讯系统安装在一个长1m、外径30cm 的密封圆柱形钢桶内,设备和钢桶总质量为100kg。钢桶上接第4节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的工作效果最佳。若钢桶倾斜,则影响设备的工作效果。钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。 系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。 问题1某型传输节点选用II型电焊锚链,选用的重物球的质量为1200kg。现将该型传输节点布放在水深18m、海床平坦、海水密度为×103kg/m3的海域。若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。 | 问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。 问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。布放点的海水速度最大可达到s、风速最大可达到36m/s。请给出考虑风力、水流力和水深情况下的系泊系统设计,分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。 二、模型假设 1.不考虑流体对锚链的作用,忽略锚链本身的伸长,锚链沿长度均匀分布; 2.假设风是二维的,只存在平行于水平面的风速,不存在垂直方向上的分量;
数学建模A题系泊系统 设计 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
系泊系统的设计 摘要 本题要求观测近海观测网的组成,建立模型对其中系泊系统进行设计,在不同风速和水流的情况下确定锚链,重物球,钢管及浮标等的状态,从而使通讯设备的工作效果最佳。求解的具体流程如下: 针对问题一,分别对系统中的受力物体在水平方向和竖直方向上的力进行分析,找出锚链对锚无拉力时的临界风速,运用力矩平衡求出钢管与钢桶的倾斜角度。对于锚链,将其等效为悬链线模型,根据风速不同判断锚链的状态,从而求出结果。 ?时能够正常工作。为针对问题二,需要调节重物球的质量,使通讯设备在36m m 了确定重物球的质量,首先将实际风速与临界风速进行比较,判断此时系统中各物体的状态,与题目中已知数据进行比较。在钢桶倾斜角度达到临界角度时,计算锚链与海床的夹角并于题中数据进行比较,计算重物球的质量。在浮标完全没入海面时,计算相应条件下重物球的质量,从而确定满足条件的重物球的质量范围。 针对问题三,要求在不同条件下,求出系泊系统中各物体的状态。以型号I锚链为例,当水流方向与风速方向相同时,系统条件最差,分析在不同水深条件下的系泊系统设计。由题中已知条件确定系统设计的限制条件,对系统各物体进行受力分析,以使整体结果最小,即可得出最优的系泊系统设计。 关键词:悬链线多目标非线性规划 一、问题重述 近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。钢桶上接第4节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的工作效果最佳。若钢桶倾斜,则影响设备的工作效果。钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。 系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。
实验:Windows下对等网络的实现 实验目的 了解虚拟机中网络适配器的配置。 了解对等网络的基本概念与结构。 学习对等网络组件在系统中的安装与设置方法。 掌握利用对等网络进行数据传输与文件共享的方法。 实验任务 为虚拟机中的Windows系统安装网络组建。 配置虚拟机的IP地址设置、协议与服务绑定等网络参数,使之能从主机上访问虚拟机。 在虚拟机上设立共享目录、共享文件、设立权限等; 从主机映射虚拟机上的共享目录。 预备知识 虚拟机的原理和vmware虚拟机软件的使用 Windows操作系统基本操作 计算机网络原理与TCP/IP协议 实验平台与工具 PC机+Windows XP SP2 Vmware5.5+Windows2003 server 实验用时 120分钟 基础知识 VMware的几种网络模式 1.bridged(桥接模式) :等于让Guest和Host系统并列在同一个子网中,占用两个ip,相互独立(对 于绑定网卡的子网络就不适用了,而且Guest的包就直接出去了,Host管不了)。等效网络结构 如下:
2.host-only(主机模式) :对应Host里面的"VMnet1",Guest的ip由VMware的DHCP提供,相当 于与Host网线直连如果要访问外网,还需要手工做网桥。其等效网络结构图如下: 3.NA T (网络地址转换模式) :这个对于让Guest OS访问Internet是最简单的,对应"VMnet8",直 接使用Guest认的网卡就行了,ip是VMware的DHCP对应VMnet8分配的,与外网无关,但 Guest对外的访问,会自动转换出去。其等效网络结构图如下: 实验步骤 第一部分:准备运行环境
第19卷第5期湖 北 工 学 院 学 报2004年10月 Vol.19No.5 Journal of Hubei Polytechnic University Oct.2004 [收稿日期]2004-05-25 [作者简介]詹春华(1971-),男,湖北红安人,华中科技大学硕士研究生,研究方向:计算机网络,分布式计算. [文章编号]1003-4684(2004)10 0034 03 对等网络搜索方法比较与分析 詹春华,陈晓苏 (华中科技大学计算机学院,湖北武汉430074) [摘 要]详细介绍了现存的P2P 网络中的搜索技术,对搜索方法进行了比较和分析,指出了它们的优缺点.[关键词]对等网络;分布式搜索;搜索[中图分类号]T P 393 [文献标识码]:A 对等网络(peer to peer,P2P)技术是近年来计算机网络技术中的一个热点.P2P 可简单地定义为对等点(peer)之间通过直接交换信息从而达到共享计算机资源和服务,每一个对等点可以同时充当客户端和服务器两种角色,以该技术构建的网络称为对等网.对等网络是一个完全分布式的网络,所有对等点都是自治的,没有统一的管理,它们共同组成一个系统.对等网络在容错性、资源共享的可扩展性、自我组织、负载平衡、匿名等方面具有很大的优势.目前P2P 技术被广泛应用于文件共享、协同工作、分布式计算等领域. 对等网络中的一个基本问题就是如何找到储存有特定数据的节点,即分布式搜索问题.当节点在其自身找不到想要的对象时,就会发出请求,搜索过程涉及请求转发方法、收到请求消息的节点、消息的形式、某些节点维护的局部索引等方面. 不同网络结构可能会采用不同搜索方法.搜索方法对于对等网络系统的性能、网络流量和可扩展性等方面有很大影响. 笔者详细介绍了现存的P2P 网络中的搜索技术,对搜索方法进行了比较和分析,指出了其优缺点. 1 P 2P 系统分类 当前的P2P 系统,可以根据系统是否对拓扑结构和共享信息(文件)存放位置作出规定分为两大类:非结构化系统和高度结构化系统. 非结构化系统对网络拓扑结构的构成没有严格 的限制,节点可以自由地动态加入网络.非结构化系统主要关注的是共享数据,但对每个节点的共享数据的存放位置没有很好的规则,每个节点可以随意地决定其要共享的数据和共享数据的位置.非结构化系统不能保证每个搜索都能成功. 非结构化系统还可根据P2P 网络模型分为两类:纯P2P 系统和混合P2P 系统.在纯P2P 系统中每个节点的地位都是平等的.混合P2P 系统中,某些节点为超级节点,其余节点则为叶节点,超级节点为其相邻的叶节点的文档建立索引,并为相邻的叶节点提供搜索服务.这一类的系统有Napster [1]、Gnutella [2] 、Fr eenet [3] 等. 高度结构化系统对拓扑结构的 叠加"被严格控制,文件(或者文件指针)存放在确定的位置上. 2 非结构化系统的搜索方法 非结构化系统的搜索方法主要有两类:一类为盲目搜索,它不依赖于任何已知信息,简单地将搜索请求传播给足够多的节点.另一类为启发式搜索,节点利用已知的信息进行搜索.已知信息可以是节点根据已有的搜索结果逐步建立的搜索知识库,也可能是准确的目标位置信息.这些信息的位置也有很大变化,在集中式网络结构中,该信息存在于一个所有节点都知道的中央目录,在分布式网络结构中,该信息保存在每个节点自身. 2.1 盲目搜索 2.1.1 基本盲目搜索方法 这种方法基于洪泛法,节点向所有相邻节点转发搜索请求,在搜索请求中
实验小型办公室对等网络的组建 一.实验目的 1.熟悉网卡、掌握如何在Windows下如何察看网卡的型号、MAC地址、IP 地址等参数。 2.熟悉Windows中的网络组建及各参数的设置和基本意义。 3.在对等网中建立共享。 4.网络测试命令PING的用法 二.实验任务与要求 1、网卡是网络中不可缺少的网络设备,掌握其使用情况,及如何设置其参数对网络的正常使用非常重要。本部分要完成以下任务: (1)利用Windows下Ipconfig 命令查看网卡的基本参数。 (2)如何设置网卡的IP地址。 2、Ping是个使用频率极高的实用程序,用于确定本地主机是否能与另一台主机交换(发送与接收)数据报。根据返回的信息,就可以推断TCP/IP参数是否设置得正确以及运行是否正常。 (1)Ping 本机Ip(Ping 本机机器名;Ping 127.0.0.1)。 (2)Ping 邻近计算机的ip(或者是对方计算机的机器名)。 (3)Ping 网站(前题是能接入Internet)。 3、对等网络(Peer to Peer)也称工作组模式,其特点是对等性,即网络中计算机功能相似,地位相同,无专用服务器,每台计算机相对网络中其他的计算机而言,既是服务器又是客户机,相互共享文件资源以及其他网络资源。本次实验要求完成以下任务: (1)如何修改计算机所在工作组、计算机名。 (2)配置网卡并注意观察网络硬件的连接方法。 (3)完成对等网的组建与测试。 三.实验步骤 (1)Ipconfig的使用
(2)利用“网上邻居”修改网络参数。 (3)PING命令的使用(报告中只要求简化过程) ·ping 本机IP
Internal Combustion Engine &Parts 0引言 近海系泊系统作为气象监控,海洋探测的主要载体工具,对工程的实际应用有一定的积极作用。为了开发海洋资源,促进经济的发展,满足日益增长的能源需求量,深海油气的开发已成为必然趋势,而系泊系统的设计是深海平台开发的关键问题之一,其设计的目的是保证选择的型号满足工作功能需求,建立相关的代数模型研究在不同情况下的设计方案。 1系泊系统模型 1.1系泊系统平衡模型 忽略作用在锚链上的流动力, 可以将整个锚链简化成悬链线的形式,浮标系统和系泊系统在经过持续海风时浮 标停止运动,系泊系统达到平衡,运用牛顿运动定律和平 行四边形状规则对系统内的各个物体进行受力分析,得到关系表达式为 第一钢管对浮标的拉力为T ,T 与竖直方向多的夹角为θ,浮标所受的浮力为F f ,所受海风荷载为F N ,浮标本身的重力为G ,浮标沉在水中的百分比为α,浮标的直径为d ,沉在水中的高度为h f ,海水的密度为ρ,风速为V ,根据海风荷载近似公式为 求。同时满足轮胎加防滑链极限包络大于 15mm 间隙要求。图3图4Z 向空间 >80mm 图5铆接设计图6铆接设计 ③翼子板下部设计。翼子板下部设计成台阶形。当下部长度>120mm ,需设计成双台阶形(图4),便于两个安装点安装。当翼子板下部刚度不足时,翼子板下部增加下部加强板。翼子板下部设计注意几点:1)翼子板下部加强板材料DC05,料厚为0.7-1.0。2)翼子板下部加强板与翼子板下部安装面打3-5焊点相连。④翼子板后部设计。翼子板后部由于前门总成运动包络影响,翼子板翻边向内小于45度,利于成型。通常安装面设计成台阶形或平 面。翼子板后部安装孔设计圆孔或开口U 形孔,U 形更利于装配。 ⑤翼子板上部设计。 翼子板上部通常安装点采有台阶设计。根据冲压工艺反馈,翻边高度设计为<40mm ,防止出现面品问题。 为满足行人保护要求,通常会从以下几种方式考虑。通常翼子板支架设计成几字形,并在支架两开孔落化(图4)。翼子板上部与边梁高度控制在80mm 以上(图4)。翼子板翻边在满足刚度前提下,尽量开豁口。随着新工艺的发展,翼子板结构,可以采铆接技术,具体设计如图5、6所示。 3制造过程控制 ①翼子板周边件产品要符合设计精度要求。②翼子板过涂装通常有两种方式,一种是在焊装装配 随车身一同电泳,另一种是单件单独电泳。建议采用第一 种,防止总装配出现难调整问题。③总装装配严格按工艺装配相关件。按装配顺序装配完成,再作微调。4结语总之保证翼子板品质,要从设计、制造过程着手。随着 铝合金翼子板、塑料翼子板应用,翼子板设计、制造过程有所变化,但总体设计理念不变。参考文献: [1]袁亮,秦信武,苗布和.汽车前翼子板的布置和结构设计[J].设计研究,2012,04,28. 系泊系统的研究设计 王莎莎;晏明莉 (河南师范大学,新乡453007) 摘要:本文所建立的近海系泊系统模型主要用于研究系泊系统在不同环境下的内在关系,进而给出适应不同情况的设计方案。影 响系泊系统的主要因素分别为锚链的型号,长度和重物球的质量,以及锚链的倾斜角度,浮标的吃水深度和游动区域,通过对系统中各个部分进行受力分析,建立相关的代数模型。该模型通过建立平衡方程组,采用最优控制策略、二分法收敛性和迭代判断,反复迭代计算求解。分别把锚链的型号,长度和重物球的质量作为自变量,把锚链的倾斜角度,浮标的吃水深度和游动区域作为因变量,建立模型进而得出不同环境下系泊系统的设计方案。 关键词:系泊系统设计;最优控制策略;二分法;平衡方程组;迭代计算
系泊系统的设计 摘 要 近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成,其中系泊系统由钢管、钢桶、重物球及锚链共同组成。此种系泊系统承受风、浪、流的作用及锚链的作用力,运动特性十分复杂。因此,针对海洋环境中水声通讯系统的要求,分析风浪中浮标的动力问题并设计出既安全又经济的系泊系统,对保证水声通讯系统的工作效果来说意义重大。 本文运用了两种方法对锚链进行了受力分析,首先对单一材质的锚链进行分析,从而得出了经典悬链方程,对不同段不同材质的锚链进行分段受力分析,得出了不同段不同材质的悬链方程,该方程的得出极大的方便了计算浮标锚泊系统的初始状态,为动力分析奠定基础;其次利用牛顿法对锚链受力问题进行了数值求解,得到当海面风速为12/m s 加大到24/m s 时,每节钢管的倾斜角度也随之变大,浮标的吃水深度也不断增大,浮标的游动区域增加的更为明显。当风速加大为36/m s 时,钢桶的倾斜角已超过5度,为使钢桶倾斜角小于5度,须将重物球的质量增加至1783kg 。 再考虑风力、水流力、潮汐(波浪)等动力因素时,可以将问题进行简化,即直接考虑在水深18m 的情况下由于波浪的作用(准确的说是2m 波浪的作用),可使整个浮标漂浮于水面上(20m 情形),也可使整个浮标沉于水面下(16m 情形)。最后通过对浮标的受力分析,可得到浮标的动力控制方程,采用数值方法,可以得到在风速为36/m s ,水流速度为1.5/m s 时,倾斜角、吃水深度的数值解。 关键词: 浮标;系统;设计;动力分析
一.问题重述 近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。水声通讯系统安装在一个长1m、外径30cm 的密封圆柱形钢桶内,设备和钢桶总质量为100kg。钢桶上接第4节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的工作效果最佳。若钢桶倾斜,则影响设备的工作效果。钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。 问题1某型传输节点选用II型电焊锚链22.05m,选用的重物球的质量为1200kg。现将该型传输节点布放在水深18m、海床平坦、海水密度为1.025×103kg/m3的海域。若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。 问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。 问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m20m之间。布放点的海水速度最大可达到1.5m/s、风速最大可达到36m/s。请给出考虑风力、水流力和水深情况下的系泊系统设计,分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。 二.模型假设与符号说明 1.模型的假设 由于浮标在海洋受海风、气流、海浪等的作用,气象及水文条件多变,在此,我们对整个问题作适当假设,在下文中,当涉及到具体问题时,我们将有针对性地给出必要的补充。 (1)锚链重力远远大于锚链所受到的流体作用力; (2)海床平坦,无凹凸不平情况; (3)浮标始终是垂直于海平面的,无倾斜或跌倒现象; (4)海面风速均匀、恒定,且风向始终平行于海平面; (5)海水流速均匀(流速与水深无关),且方向恒定(海流无垂直分量); (6)锚链在整个过程中是不可弹性形变。
对等网络概念原理及应用 一、对等网络概述 1.1 对等网络的定义 集中式管理与控制模式网络结点在功能上是不平等的,总有一些少数结点在网络中占居中心主导地位,管理其它从属结点可执行的操作,控制它们间的信息交互。其特点是网络管理复杂度小且易于控制,但不足是网络工作效率低、规模扩展性不好且存在单点故障。 分布式管理与控制模式网络结点在功能上是平等的,网络中没有结点比其它结点拥有更大的特权,网络的管理与控制有各个结点间的相互协作来完成的。其特点是网络工作效率高、规模扩展性强,但网络管理复杂度大且不易于控制。 虽着因特网规模的不断扩大与应用功能的不断扩展,目前因特网主流应用模式---客户服务器模式已不能满足用户的实际需求。迫切需要新的应用模式。 对等计算思想本质:打破传统的网络集中管理与控制的客户服务器模式,使网络成员享有自由、平等、互联的权力。 对等网络(Peer-to-Peer network,P2P):分布式系统与计算机网络相结合的产物,是采用对等计算模式工作的计算机网络(应用服务)。每个节点在行为上是自由的,在功能上是平等的,在关系上是互联的。所有节点分布式地自组织成一个整体网络,能够极大地提高网络效率,充分地利用网络带宽,发挥每个网络节点的潜能。 对等计算起源于1956年,但由于当时的网络技术条件的限制与网络应用没有充分地发展起来,一直未引起学术、工业与商业界重视,因此,它的发展十分缓慢。 网络应用实践表明:任何一种思想、理论与技术的流行通常需要一个杀手级的应用(killer application),以一种征服性的力量冲击人们的传统思维。对等网络的杀手锏级的应用则出现在1999年,第一个应用性对等网络Napster,一种音乐下载软件,创造了在半年时间内拥有5000万用户的网络奇迹,向世人展示了对等网络的优异性能和巨大潜力。继Napster之后,又有一系列随着人们耳熟能详的对等网络应用软件,如Gnutella、KaZaA、BitTorrent、eDonkey/eMule、Skype
数学建模a题系泊系统 设计 集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]
系泊系统的设计 摘要 本题要求观测近海观测网的组成,建立模型对其中系泊系统进行设计,在不同风速和水流的情况下确定锚链,重物球,钢管及浮标等的状态,从而使通讯设备的工作效果最佳。求解的具体流程如下: 针对问题一,分别对系统中的受力物体在水平方向和竖直方向上的力进行分析,找出锚链对锚无拉力时的临界风速,运用力矩平衡求出钢管与钢桶的倾斜角度。对于锚链,将其等效为悬链线模型,根据风速不同判断锚链的状态,从而求出结果。 ?时能够正常工针对问题二,需要调节重物球的质量,使通讯设备在36m m 作。为了确定重物球的质量,首先将实际风速与临界风速进行比较,判断此时系统中各物体的状态,与题目中已知数据进行比较。在钢桶倾斜角度达到临界角度时,计算锚链与海床的夹角并于题中数据进行比较,计算重物球的质量。在浮标完全没入海面时,计算相应条件下重物球的质量,从而确定满足条件的重物球的质量范围。 针对问题三,要求在不同条件下,求出系泊系统中各物体的状态。以型号I 锚链为例,当水流方向与风速方向相同时,系统条件最差,分析在不同水深条件下的系泊系统设计。由题中已知条件确定系统设计的限制条件,对系统各物体进行受力分析,以使整体结果最小,即可得出最优的系泊系统设计。 关键词:悬链线多目标非线性规划 一、问题重述 近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。水声通讯系统安装在一个长1m、外径30cm的密封圆柱形钢桶内,设备和钢桶总质量为100kg。钢桶上接第4节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的工作效果最佳。若钢桶倾斜,则影响设备的工作效果。钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。
系泊系统的设计 发表时间:2020-01-18T09:59:04.837Z 来源:《基层建设》2019年第28期作者:武佳雷宇张曼[导读] 摘要:系泊系统不论是在船舶航行,还是在海洋资源的综合利用与开发中,均得到了广泛应用,因而,系泊系统的设计问题十分具有现代意义。 华北理工大学数学建模实验室 063000摘要:系泊系统不论是在船舶航行,还是在海洋资源的综合利用与开发中,均得到了广泛应用,因而,系泊系统的设计问题十分具有现代意义。本文隔离系统各组成部分,逐一进行受力分析和力矩分析,构造相应的刚体力学方程组,并根据海水深度联系各参数最终建立系泊系统状态模型。 关键词:系泊系统状态模型;受力平衡;力矩平衡 0引言 当海面风速一定且海水静止时,系泊系统的状态,即钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域与系泊系统各部分之间的受力平衡和力矩平衡以及海水深度的约束密切相关。因此,可以隔离该系统的各组成部分,逐一进行力学分析,并最终根据海水深度,联系各参数建立系泊系统状态模型。具体数值参考2016年高教社杯全国大学生数学建模竞赛A题。系泊系统可分为浮标、钢管、钢桶和重物球、锚链四个部分,由题中锚链长度和型号计算得锚链共有210个链环,为了方便表述,对系统内部由上到下的构件进行标记:表1 各构件编号 1力学方程与模型的建立 1.1对浮标的力学分析[1] 漂浮在水面上的浮标,受到来自水平方向的风力、海水对它的浮力、其余组件对它作用力以及自身的重力,与夹角为 。已知浮标的高为,质量为,直径为,海水的密度为,设浮标的吃水深度为,根据重力、浮力公式,以及近海风荷载的近似计 算公式,可得。此时,浮标受到速度为的海风作用在海面上达到平衡,受力分解后,其在水平方向和垂直方向的受力均平衡。于是整理可得关于浮标的完整的刚性力学方程组[2]。其中,其在竖直面的投影高度即为浮标的吃水深度。 1.2对钢管的力学分析没入水中的钢管,由于海水静止,因此忽略水流力水平方向的作用。以与浮标相接的第一节钢管为例,其受到浮标对它的反作用力 、其余组件对它的作用力、海水对它的浮力以及自身的重力。为保持力矩平衡,钢管不发生旋转的现象,浮标对它的反作用力应相对于它的中心轴更偏向竖直方向。 此时有相对于竖直方向的夹角与和的夹角相等,即:,根据牛顿第三定律:。此时,钢管在这些力的共同作用下保持平衡。已知每节钢管的长度为 ,直径为,质量为,根据受力平衡、力矩平衡和重力、浮力公式,可得到相应的刚性力学方程组。其中,其在竖直面的投影高度为。 对于余下的三节钢管,依次进行同样的力学分析。得到对应的完整的刚性力学方程组,以及各钢管在竖直面的投影高度为、 、。 1.3对钢桶和重物球的力学分析没入水中的钢桶和重物球,由于海水静止,则忽略水流力水平方向的作用。对于重物球,其受到钢桶对其的作用力、海水对它的浮 力以及自身的重力。对于钢桶,其受到重物球对其的作用力(方向竖直向下)、其余部件对它的作用力(与竖直方向夹角为 )和(与夹角为)、海水对它的浮力以及自身的重力.根据牛顿第三定律有。此时,钢桶在这些力的共同作用下保持平衡。已知钢桶的长度为,重物球的质量,设备和钢桶的总质量为,且外径为,根据受力平衡、力矩平衡(注意判断力矩方向)、牛顿第三定律则和阿基米德定律可得到对应的完整的刚性力学方程组。 此时,其在竖直面的投影高度为。 1.4对锚链的力学分析选取编号为的链环,联系该链环以及其上的其余部件构成一个新的整体,对该整体进行受力平衡的分析,其受到海风给它的风力、余下部分给它的拉力、海水给它的浮力以及自身所受的总重力,与水平方向夹角为。通过对整体的分析,简化了作用力与反作用力不断迭代的过程,更加直观的得到受力平衡时的状态。锚链密度为,每节链环的长度和单位长度的质量,再根据前式得到整体所受的总重力,受到海水的总浮力,整理后,可得到关于这个整体的完整的刚性力学方程组。 此时,各链环与竖直方向的夹角即可描述出锚链的形状。各节链环在竖直面的投影高度分别为: 1.5建立系泊系统状态模型 已知水深为,则有