? Semiconductor Components Industries, LLC, 2008 May, 2008 ? Rev. 11Publication Order Number:
TND337/D
TND337/D
Rev. 1, MAY ? 2008
The LIN Bus in Modern
Automotive Headlamp Systems
The LIN Bus in Modern Automotive Headlamp Systems
Bart De Cock, ON Semiconductor BVBA, Belgium
Abstract
ON Semiconductor has been supplying mixed signal integrated circuits for automotive lighting systems for over a decade. High-volume products include lamp-failure detection, contact-less sensor interfaces, HID (High Intensity Discharge) ballast drivers and stepper motor drivers. Modern automotive headlamp systems will rely heavily on the use of sensors and actuators in the near future. These remote sensors and actuators are connected to an electronic control unit via a bus network. Various types of bus networks are feasible. This paper will concentrate on the cost and performance advantages when using the LIN (Local Interconnect Network) bus network in a headlamp application. Various solutions will be presented providing insight into the different LIN bus architectures available. The integration of a stepper motor driver with LIN interface is demonstrated as an example. In conclusion, the LIN bus provides superior performance when combined with the appropriate system architecture for cost sensitive applications.
1 Introduction: Headlamp Actuator Wiring Architecture and Elements
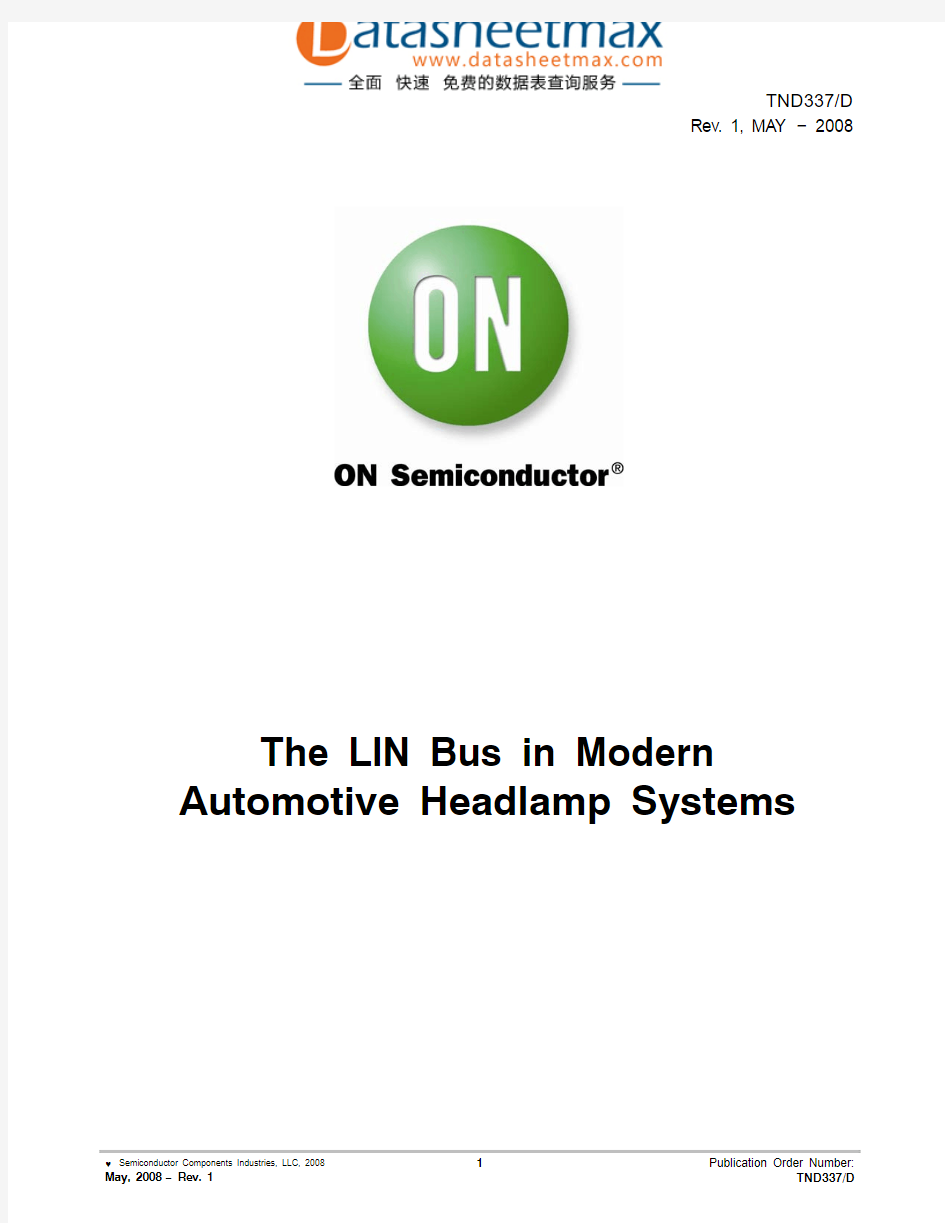
Figure 1 shows the basic components used throughout this text. The signals of chassis sensors (suspension, turn indicator, steering wheel, car speed, rain sensor and other) are connected through individual wiring or by means of a multiplex bus to the “Light Control Unit” (or LCU). This unit contains - amongst other functions - the intelligence to process the sensor information and to drive small actuators in the headlamp according to the regulations.
Figure 1: Basic Wiring Elements
The headlamp actuators are controlled by means of dedicated wiring (so-called “Direct Drive”) or using again a multiplex bus. A multiplex bus is ideally suited when used together with mechatronic modules. Mechatronic modules are compact assemblies of an actuator together with its drivers (typically power electronics). The wires connected to mechatronic modules carry (besides the supply lines) low-power control signals of the bus, while the wiring of “Direct Drive” carries the PWM chopped current of the individual motor phases and some diagnostics or sensor feed-back signals. From these differences, it is clear that “Direct Drive” has a negative impact on technical aspects (EMC, cabling dimensions and routing), cost (number of wires, connectors, non-modularity) and finally, time-to-market (LCU hardware and cabling variations depending on lighting options require re-qualifications).
2 LIN Basics
A small introduction to LIN will aid understanding of the remaining chapters. LIN is essentially a low-cost network (or multiplex bus) with one master control unit and one or more slave control units. The LIN master initiates communication by sending the “Header”. The “Data Fields” are sent by a LIN master or a LIN slave. Only one slave will respond to a given header.
Figure 2: LIN basic network and message frame
The slave nodes cannot initiate communication: they only respond if triggered by specific identifier fields. The maximum communication speed on a LIN bus is 19200 baud. The LIN nodes can therefore send/receive a full 8-byte command every 10 ms. Shorter commands can even run every 5 ms. This bandwidth is large enough to drive leveling, bending, AFS (Adaptive Front lighting System) and ballast functions of a single headlamp, and it also provides high-quality diagnostics feed-back. Please refer to https://www.doczj.com/doc/3511001509.html, for more information on LIN.
3 Headlamp Wiring Architecture Classification
The proposed classification is based on the headlamp type, wiring of the sensors, the physical location of LCU’s, the types of the actuators and their wiring. This yields six variables with about 100 possible combinations. Taking into account the constraints mentioned in the last column of Table 1, 37 cases remain. These cases can then be categorized into five halogen architectures and six HID wiring types.
The drawings in the discussions below are simplified and oriented towards the position of the LCU and the actuator connections: the exact number of wires is not detailed; supply, diagnostics, and bulb wires are not taken into account.
Variable Value Subtype Name Comments & Constraints
leveling H1 actual standard is S1, C1, L2
Headlamp type halogen
leveling + bending H2
C3 too expensive L1 not standard if
C1 or C2 -> only 1 out of (L1,B1) leveling H3 actual standard is S1, C1, L1
HID leveling + bending H4
leveling + bending
+ afs
H5
if C1 or C2 -> only 1 out of (L1,B1)
wired S1 not with C3 and (C2 combined with
H4 or H5)
Sensor
signals
bus S2
le car interior C1 S variable not relevant Control Unit sing car front C2
dual 1 per headlamp C3
direct drive L1
Leveling
actuator
multiplex L2
direct drive B1
Bending
actuator
multiplex B2
variable not relevant for H1, H3
direct drive A1
AFS
actuator
multiplex A2 variable not relevant for H1, H2, H3, H4
Table 1: Headlamp wiring classification
4 Halogen Wiring Architectures
4.1 Cabin Location of Halogen LCU
Figure 3 summarizes the possible cases with only one control unit, this being located inside the passenger cabin. This is the standard location used today and allows simple connection of sensor signals to the control unit. Architecture H1 represents the actual standard halogen leveling with manual adjustment using a brushed DC motor in a mechatronic combination. Bending option (architecture H1a) is then a logical extension based on existing HID standard leveling technology (see Table 1). However, from a wiring point of view, architecture H1b is much more compatible with H1. An analog wire is replaced by LIN. On the position of the LCU for halogen bending systems, one solution is the integration within the standard manual adjust unit. A further improvement is to move the halogen LCU inside the dashboard control unit. By means of a standard central display and its push-buttons, a manual adjustment is accomplished and at the same time the light control system is right in the vicinity of speed and steering sensor information. This step would require the cooperation of lighting and dashboard tier-1 suppliers.
Figure 3: Halogen, cabin location of LCU
4.2 Front Location of Single Halogen LCU
The architectures depicted in Figure 4 have only one control unit, located at the front-module, e.g., attached to one headlamp only. Headlamps are by nature not symmetrical, so this asymmetric mounting would not impact stock costs, but there might be objections against this architecture related to crash-sensitivity of lighting functions and system FMEA. Architecture H2a is based on re-use of existing building blocks (standard halogen and HID leveling technology). In H2b, the wiring is made simpler and will not change when bending function is added or removed (bending function is true add-on).
Architectures H2a and H2b would require an interface from standard manual leveling to PWM (or bus) in addition to a front-LCU and this may prove too expensive in a low-cost halogen market. It is reasonable to believe that architectures H1 and H1b are more attractive for the large cost optimized halogen market.
Alternatively, if sensor signals are available on a bus or PWM, then architectures H2a and H2b show interesting wiring compatibility with HID systems (see chapters below).
Figure 4: Halogen, front location of LCU
5 HID wiring Architectures
5.1 Cabin Location of HID LCU
Currently, the passenger cabin is the standard location of HID leveling LCU, because it is in the vicinity of the chassis sensors. These sensors are not required to be on a bus system (PWM is also ok). In both cases (see Figure 5), adopting the LIN bus minimizes cost-additions for bending and AFS functionality. Architecture X1a suffers from high-complexity wiring where direct drive is used for more than one actuator, while X1b reduces wiring and the impact of varying lighting options is reduced to an absolute minimum: all actuators are driven through LIN-mechatronic modules. An interesting item is the connection of the Xenon ballast to LIN for diagnostics and, for example, the control of light output. Architecture X1b is highly compatible with the H1b architecture discussed above; this is important for car platforms that need both bending halogen and HID headlamp options.
Figure 5: HID, cabin location of LCU
Figure 6 shows an asymmetric headlamp configuration with the possibility to mount the LCU directly on the ballast unit. Architectures X2a and X2b are highly compatible with the H1a and
H1b proposals, with potential differences in the sensor bus topology: CAN or LIN, depending on the amount of sensor data needed for AFS systems and on-board-diagnostics requirements. A bus carrying sensor signals is preferred for HID systems as the wiring architecture does not need to change with variations in the number of attached sensors (number of sensor signals increase from leveling to bending to AFS) and the bus can be re-used for diagnostic purposes of the LCU and the headlamps. The advantage of LIN for front-mounted HID LCU’s is again the modularity and the reduction of wiring complexity in the front-module.
Figure 6: HID, front location of single LCU
The architectures depicted in Figure 7 require one LCU per headlamp. The sensor-bus is again re-used for diagnostics. In X3a, the electronics board of the LCU contains the leveling drivers, together with bus mastering for the other options like bending and AFS. This is then combined with software to master the regulatory requirements. X3b also shows the leveling performed through LIN. Drawbacks of both architectures are the relatively high-cost and incompatibility with halogen architectures. The advantage of LIN for X3a and X3b is again the modularity and the reduction of wiring complexity in and around the headlamp itself.
Figure 7: HID, front location of Dual LCU
6 Discussion on Architectures
Considering the simplicity of wiring, architectures H1b and X1b are candidates to become “the architectures of choice” in headlamp systems for the coming years. The driving force would be the high potential of bending light in a cost-sensitive halogen market. Both architectures are compatible with the two types of sensor wiring (bus and PWM) and are compatible with standard halogen and HID leveling systems to date.
Architectures H2 and X2 offer possibilities for high-end car-platforms that still have a substantial halogen penetration. The advantage is the removal of the LCU outside the passenger compartment (space requirements).
Architecture X3 seems to be an expensive solution, but will certainly be important for high-end car platforms with nearly no halogen penetration.
In any case, the architecture of choice will be made by the OEM’s and the Tier1 headlamp suppliers and is related to the penetration rate of halogen/HID in the car type and the forecasted headlamp options (leveling, bending, AFS).
7 LIN Motor Driver for Headlamp Mechatronic Applications
With the exception of halogen leveling, the motors used in headlamps are stepper motors. ON Semiconductor has developed LIN solutions to support mechatronic applications utilizing stepper motors. The LIN technology also enables the use of the LIN bus outside the local scope of sub-systems in a car. It is now possible to network modules in the front of the car with LCU’s inside the passenger compartment by means of a LIN bus. An example of such a LIN slave product is the AMIS-30621 stepper motor driver, which contains a well-balanced LIN command set, an advanced state-machine to perform positioning tasks and high-power drivers to activate the motor coils. Detailed diagnostics feed-back helps the LIN master (which is situated in the LCU) to obtain all necessary information of the mechatronic module.
Figure 8: Application diagram LIN stepper motor
Upon LIN wire break or other LIN malfunction, the motor adopts a safety position to meet regulation requirements. Other features of interest are micro-stepping capability and stall detection. Figure 8 shows an indicative application diagram; more information is available in the literature.
8 Conclusion
A classification of wiring architectures of headlamp actuator systems was discussed. It is shown that in all discussed architectures, LIN offers increased modularity, reduced complexity and variation of wiring harness and reduced EMC emissions. This results in system cost reduction, increased performance and shorter time-to-market. ON Semiconductor has the right technology and products available to support headlamp system developers with LIN mechatronic solutions.
9 References
https://www.doczj.com/doc/3511001509.html,
Gerd Bahnmueller, “Headlamp Development-Reduced Time to Market”, PAL 2001 Symposium, Darmstadt University of Technology.
Alexis Dubrovin, “Optimised Lighting Systems Architecture”, PAL 2001 Symposium, Darmstadt University of Technology.
Michael Hamm, “System Strategies for Adaptive Lighting Systems”, PAL 2001 Symposium, Darmstadt University of Technology.
Geert Vandensande, “System-on-Chip Slave Nodes”, paper presented at 1st International LIN Conference, September 2002, Ludwigsburg.
John V. DeNuto et al., “LIN Bus and its Potential for use in Distributed Multiplex Applications”, SAE Technical Paper 2001-01-0072.
This Paper is Published in "Proceedings of the 5th International Symposium on Progress in Automobile Lighting.
Darmstadt University of Technology, Laboratory of Lighting Technology, in the Series "Darmst?dter Lichttechnik".
Copyright 2003 Herbert Utz Verlag GmbH.
ON Semiconductor and are registered trademarks of Semiconductor Components Industries, LLC (SCILLC). SCILLC reserves the right to make changes without further notice to any products herein. SCILLC makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does SCILLC assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.
“Typical” parameters which may be provided in SCILLC data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. SCILLC does not convey any license under its patent rights nor the rights of others. SCILLC products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the SCILLC product could create a situation where personal injury or death may occur. Should Buyer purchase or use SCILLC products for any such unintended or unauthorized application, Buyer shall indemnify and hold SCILLC and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that SCILLC was negligent regarding the design or manufacture of the part. SCILLC is an Equal Opportunity/Affirmative Action Employer. This literature is subject to all applicable copyright laws and is not for resale in any manner.
PUBLICATION ORDERING INFORMATION
毕业论文(设计) 题目 学院学院 专业 学生姓名 学号年级级指导教师 毕业教务处制表毕业 二〇一三毕业年三月毕业二十日
应用电子技术专业毕业论文 一、论文说明 本团队长期从事论文写作与论文发表服务,擅长案例分析、编程仿真、图表绘制、理论分析等,专科本科论文300起,具体信息联系 二、论文参考题目与思路 高温CMOS模拟运算放大电路的研究与设计 基于支持向量机和遗传算法相结合的模拟电路故障诊断方法研究 单粒子效应电路模拟方法研究 线性电路的全温区电路模拟软件TSPICE 运用于宽带系统中的可重构模拟基带电路的研究和设计 基于生物医学信号采集的多通道模拟前端集成电路设计 集成电路测试系统后逻辑支持电路改进与模拟延迟线性能分析 单粒子效应电路模拟方法研究 FTFN在模拟集成电路中的应用研究 浅谈模拟电子电路实验的主要方法 可编辑的模拟电路仿真器材库的设计与实现 模拟电路多参数灵敏度分析 模拟数字电路故障诊断新方法 神经网络在模拟电路故障诊断中的方法研究 基于故障字典法的模拟电路故障诊断系统的研究 闪光鞋控制电路 QX_4型起动器控制电路的改进 HV-720摄像机自动灵敏度控制电路的剖析与改进 JEM-100CXⅡ透射电镜真空系统指标及其控制电路调整
对电动机起动控制电路的改进 介绍一种路灯控制电路 一种通用DMA控制电路的设计与实现 微功耗热释电红外控制电路HT—7605 集成电路测试仪控制电路与分选系统接口技术研究 射频接收机中自动增益控制电路的研究与设计 传感器应用中的“控制电路”与“工作电路” 三端稳压器TL31在家用控制电路中的应用 GEMFU2型多幅照相机控制电路的检修 “吊篮上升”防超高控制电路 牙科综合治疗机控制电路故障检修 微型机电系统端点特性建模技术研究 微电子驱蚊器新奇产品大市场 多功能微电子式汽车,摩托车电器线路保护器问世 原子层淀积技术及其在微电子薄膜中的应用 利用场发射电子探针鉴定微电子构装覆晶焊点与金属化层之界面反应 评华润安盛与星科金朋的合作 微电子自动闭塞电源盒的研制与开发 七星微电子库存管理问题研究 微电子标准样片制备研究 芯邦微电子一招鲜之后的尴尬? 中国科学院微电子中心电子厂 计算机辅助设计在微电子装配中的应用 技能登高工程在人才强企战略中的应用——以南通华达微电子集团有限公司为例 国内要闻 微电子用高纯度环氧树脂和酚醛树脂
电子科技大学 UNIVERSITY OF ELECTRONIC SCIENCE AND TECHNOLOGY OF CHINA 博士学位论文 DOCTORAL DISSERTATION (电子科技大学图标) 论文题目中继增强蜂窝网络中无线资源分配 技术的研究 学科专业通信与信息系统 学号200620101010 作者姓名XXX 指导教师毛玉明教授
分类号密级 UDC注1 学位论文 中继增强蜂窝网络中无线资源分配技术的 研究 (题名和副题名) XXX (作者姓名) 指导教师毛玉明教授 电子科技大学成都 (姓名、职称、单位名称) 申请学位级别博士学科专业通信与信息系统 提交论文日期2012.09.15论文答辩日期2012.11.20 学位授予单位和日期电子科技大学2012年12月27日 答辩委员会主席 评阅人 注1:注明《国际十进分类法UDC》的类号。
RESEARCH ON KEY TECHNIQUES OF RADIO RESOURCE ALLOCATION IN RELAY-ENHANCED CELLULAR NETWORKS A Doctoral Dissertation Submitted to University of Electronic Science and Technology of China Major: Communication and Information Systems Author: X XX Advisor:Professor Mao Yuming School :School of Communication & Information Engineering
电子科技大学本科论文 格式要求 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】
电子科技大学 UNIVERSITY OF ELECTRONIC SCIENCE AND TECHNOLOGY OF CHINA 学士学位论文 BACHELOR DISSERTATION 论文题目 学生姓名 学号 学院 专业 指导教师 指导单位 年月日
电子科技大学 20 级本科毕业设计(论文)任务书 拟题单位_________________________ 审题人(签名)__________ 题目及副标题______________________________________________ 题目来源: 1.科研 2.生产 3.教学(含实验) 4.其它(选择其中一种) 主要任务: 预期成果或目标: 预期成果形式:1.硬件 2.硬件+软件 3.软件4.纯论文(选择其中一种) 指导教师签名: _____________起止时间:年月日至年月日 学生姓名_______ 专业 _________________ 学号__________ 指导单位________________________________________________ 指导教师姓名、职称______________________________________ 设计地点________________________________________________ 年月日
备注:1.此任务书应由指导教师填写,签名处须由教师亲笔签名。 2. 此任务书必须在学生毕业设计开始前....... 下达给学生。
浅谈电子招投标的主要优势 社会的改变总是日新月异,有时候快的有点让我们都无所适从,就以互联网行业的发展来说,我们还没有完全体会到,移动互联网的时代已经到来。其实不仅仅对于互联网行业,很多传统行业的发展之快也是令人耳目一新的。对于招投标行业来说,传统的招投标方式正在经受时代发展的考验,未来的前景扑朔迷离,这一切都是因为电子招投标的存在。伴随着国家政策的大力支持,目前电子招投标已经广泛运用于工程招标、电子采购、政府采购等各行各业。 作为一家提供招投标智能化服务的企业,企明星企业服务网认为,看一个事物的兴起,都是有原因的,而且这种原因往往都是人们的刚需。比如微信的崛起是人们对社交网络的私密性需求,小米的崛起是人们对高性价比智能手机的需求,滴滴打车的崛起是因为看到共享经济的光明未来,那么对于电子招投标来说,为什么会如此的受欢迎呢?如果电子招投标崛起了,到底会是因为什么原因呢?下面请跟随企明星的脚步一起分析。 电子招投标存在的四个主要优势 第一、招投标行业腐败丛生,透明化更加重要。对于招投标行业中的腐败问题,媒体曝光的太多,相信很多行业内人士也知道不少,让招投标行业更加透明成为很多业内人士的一致呼声。很明显,电子招投标的一个重要的作用就是增加了招投标活动过程中的公开透明度,让招投标更规范更透明。目前的电子招投标系统整合了国家相关法律法规以及行业规范等内容,每个节点和时间控制,都从技术上严格限定了操作流程的规范化、程序化,业务操作人员无法改变既定的程序。而且招标项目的所有信息,包括采购、招标预告、中标公告等信息,均在电子招投标系统上公开发布,可以说真正保证了招投标活动的“公开、公平、公正”原则。 第二、互联网时代,大数据成为发展趋势。当下的时代是互联网大数据的时代,从互联网金融、到智能交通、再智能医疗等领域都已经采用大数据指导经营决策,电子招投标相对于传统招投标的优势,其中一个就是基于大数据实现了对供应商的精准评估。电子招投标系统拥有大量的数据分析、整合能力,基于计算机平台的高速运行,通过操作系统对投标单位的大量数据进行分析、整合,有效地减轻了工作人员的工作负荷以及出错率,提高了整体的工作效率。 就像现在一种非常热门和流行的招标订阅工具,剑鱼招标订阅一样,大数据越来越重要。最新版本的剑鱼招标订阅就在致力于对大数据的挖掘,真正做到了用数据服务客户。团队通过招标领域的深入走访和调研,以及对从业人员的洞察分析,了解到业内人士在招标信息搜集工作中的难点、痛点。如招标信息发布时间的不确定性、信息发布渠道众多无法全面顾及,搜集工作投入巨大人力财力等等。通过对不同的招标网站和招标信息进行智能抓取分析存储,通过用户自己设置招标地域和招标关键词,可以通过手机智能精准推送,招投标从业人员不用再手忙脚乱的去查找招标信息,而是直接主动接收即可。 第三、人工智能日益兴盛,电子招投标重在去人工化。科技发展的总体趋势,就是将人类不断从体力劳动中解放出来的过程,现在的人工智能领域发展迅速,从传统行业到互联网新兴行业都在重视这一改变。电子招投标减少了招投标工作中大量的人工环节,利用操作系统对
电子工程专业毕业论文 随着当前我国社会经济的快速发展,政府提出了“以信息化促进工业化”的策略,使电 子信息工程进入到新的发展阶段,电子信息工程是一项较为复杂的系统工程,具有技术要求高、建设周期长、建设投资大的特点,必须经历由单个到群体,由简单到复杂的过程。二十 一世纪作为信息化的时代,计算机与信息技术的使用得到了快速的普及和发展。 以信息技术作为基础的信息管理,已成为企业等现代化管理的一种先进的方式。最近 几年关于工程造价方面的软件和网络技术研究的成果,Internet 技术的出现更是大大地 提高了人们获取信息的效率及信息资源的利用率,实现了全球信息资源的共享。IT 在工 程建设中的应用越来越广泛。 一、电子信息在工程档案工作中的作用 工程档案资料是指在具体的建设工程中形成的具有定意义与保存价值的图纸、图表、 文字等材料,妥善保管工程档案资料,刘工程项目的建设有着重要的作用,是对工程项目 进行有效的使用、管理、检查与维护的凭据.并起到监督与审枝工程质量的作用。固此对 于档案资料的信息实行自动化、电子化管理非常重要,电子信息可以提高工程项目的建设、经营、擞策、管理的服奇水平,从而提高企业的综合竞争力与经济效益。 传统的资判管理方式通常以纸质材料为载体,这种管理方式经过长期的探索与实践, 已经形成一套较为成熟的工作流程与管理原则方法。例如对工程建设中形成的文件进行立 卷归档。这种方法是将档案工作与文书工作相结合,形成相关文件以后,循过文书部门进 行立卷收集工作,再选往资料档案部门进行筑管理。 而电子信息则是在日常工程建设中随时形成的,以光盘、磁盘等为材料载体表现为电 子图纸、电子报表、电子信件与电子文书等,这种形式通常由工作人员将信邑记录在磁盘上,并直接在磁盘上进行更改,当修改完成后,提交到统一的办公信息数据之中,由技术 工作人员与档案资料管理人员共同使用从而消除档案资料与文件之间的界限。由于电子信 息需要随时产生与修改,并贮存于统的办公信包数据之中,固此电子信息对计算机有着较 强的依赖性,并且电子信息的归档也不仅是产生与保存资判文件,还必{剪有配套的读取 软件这就要求在电子信息发展的过程中必须构建有效的公共管理信息平台,提供邮件、检索、导航等常用的网络服务功能。 与传统的纸质挡案资料相比,电子信息主要有以下几十方面特点: ①电子信包必须依靠相关的计算机办公设备才能进行使用。 ②电子信息受距离与时问的影响较小可眦最大程度的宴现资源共享。 ③电子信息可以通过计算机办公设备迅速的进行信邑处理与传递。
电子科技大学研究生学位论文撰写格式规范 根据《关于研究生提交学位论文电子版的通知》(校研[2001]257号)的精神,将与研究生学位论文撰写格式的有关内容摘录如下。(研究生在学位论文答辩通过后,须向图书馆提交论文全文的电子版和印刷版,提交的具体方式请仔细阅读图书馆(https://www.doczj.com/doc/3511001509.html,/)主页上的“论文提交”的有关内容,并下载“学位论文提交单(回执)”)。 一、一般格式和顺序 1、封面: (1)题目:应能概括整个论文最重要的内容,具体、切题、不能太笼统,但要引人注目;题名力求简短,严格控制在25字以内。 (2)专业:以国务院学位委员会批准的专业目录中的专业为准,一般为二级学科,按一级学科培养的则填一级学科。 (3)导师:指导教师的署名一律以批准招生的为准,如有变动应正式提出申请并报研究生院备案,且只能填写指导教师一名。 (4)学生姓名和学号。 2、扉页:中文扉页(由文印中心统一制做);英文扉页(仅限博士论文)) 3、独创性声明:(单设一页,排在英文扉页后),论文送审前,学生本人及其导师均需在独创性声明上签字。 4、中文摘要:论文第一页为中文摘要,约800-1000字左右。 内容应包括工作目的、研究方法、成果和结论,要突出本论文的创造性成果,语言力求精炼。为了便于文献检索,应在本页下方另起一行注明论文的关键词(3-5个)。 5、英文摘要:中文摘要后为英文摘要。内容与中文摘要同。 6、目录:应是论文的提纲,也是论文组成部分的小标题,其内容从第一章开始。中英文摘要、主要符号表等前置部分不要放在目录里。 7、主要符号表:如果论文中使用了大量的物理量符号、标志、缩略词、专门计量单位、自定义名词和术语等,应编写成注释说明汇集表。假如上述符号和缩略词使用数量不多,可以不设专门的汇集表,而在论文中出现时加以说明。 8、引言(第一章):在论文正文前,内容为:该研究工作在国民经济中的实用价值与理论意义;本研究主题范围内国内外已有的文献综述;论文所要解决的问题。 9、正文:是学位论文的主体。写作内容可因研究课题性质而不同,一般可包括:理论分析、计算方法、实验装置和测试方法、经过整理加工的实验结果的分析讨论、与理论计算结果的比较,本研究方法与已有研究方法的比较等。 10、结论(最后一章):应明确、精炼、完整、准确,使人只要一看结论就能全面了解论文的意义、目的和工作内容。要认真阐述自己的创造性工作在本领域中的地位、作用和意义。应严格区分研究生的成果与导师科研工作的界限。 11、致谢:致谢对象限于在学术方面对论文的完成有较重要帮助的团体和人士。(限200字) 12、参考文献:只列作者直接阅读过、在正文中被引用过、正式发表的文献资料。参考
杭州电子科技大学2017年博士生导师介绍杭丽君 一、导师照片 杭丽君 二、基本信息 杭丽君Hang Lijun教授 所属学院:自动化学院 导师类别:博士生导师、硕士生导师 研究方向:电气工程及其自动化(高性能电力电子变流技术及其控制、FPGA和DSP开发和应用)博士招生学院:自动化学院 硕士招生学院:自动化学院 联系方式:ljhang@https://www.doczj.com/doc/3511001509.html, 三、个人简述 杭丽君,女,浙江海宁人,2002年/2008年获浙江大学电气工程学院学士/博士学位。浙江省“钱江学者”特聘教授。2011-2013年任美国田纳西大学电气工程及计算机系CURENT中心研究助理教授,2013-2015年任上海交通大学电子信息与电气工程学院副教授。 长期致力于高性能电力电子变流技术及其控制的研究,其应用涉及不间断电源(UPS)、电动汽车(HEV)、新能源分布式发电、交直流混合微电网、高压直流输电及传统电力系统领域;DSP及FPGA在电力电子领域的应用及开发,不断拓展DSP和FPGA等的应用技术及相关热门应用领域研究。主持和参与国家自然科学基金面上项目/青年基金/重点项目、国家科技支撑计划、上海市自然科学基金、中国博士后科学基金特别资助和一等资助、台达科教基金青年基金等多个项目。至2016年共发表本领域SCI/EI收录论文80余篇,其中国际IEEE TPE,IEEE TIE,IEEE TIA,IEEE TEC,IEE IET-PEL等本领域顶级及知名SCI期刊论文20篇,单篇最高他引200多次。曾获中国电源学会第二十一届学术年会优秀论文奖、上海交通大学“晨星”青年学者奖。长期与海内外知名高校研究所和企业保持良好的合作关系,培养了大批优秀的本科生和研究生,其中有两名硕士生获得国家奖学金。 本团队研究方向和课题与国内外前沿技术接轨,注重创新以及产学研结合,与企业有良好的合作关系。欢迎电气工程、自动化、电子信息、通信工程等相关专业学生报考。 四、学术论文 (一)代表性论文 1.M.Zhu,L.Hang,and atl.,“Protected Control Method for Power Conversion Interface under Unbalanced Operating Conditions in AC/DC Hybrid Distributed Grid”.IEEE Trans on Energy Conversion. 2.L.Hang and atl.,“A Novel Control Strategy Based on Natural Frame for Vienna-type Rectifier under Light Unbalanced-Grid Conditions,”IEEE Trans.Ind.Electron. 3.L.Hang and atl.,“Equivalence of SVM and Carrier-based PWM in Three-phase/wire/level VIENNA Rectifier and Capability of Unbalanced-load Control,”,IEEE Trans.Ind.Electron. 4.L.Hang and atl.,“Digitized Feedforward Compensation Method for High Power Density Three-Phase Vienna PFC Converter”,IEEE Trans.Ind.Electron. 5.L.Hang and atl.,"High Cross Regulation Multi-Output LLC Series Resonant Converter with Magamp Post-Regulator",IEEE Trans.Ind.Electron. (二)代表性科研项目 1.新型交直流电网中模块化多电平功率变换器的关键技术研究,主持,上海市自然科学基金委。 2.基于高性能功率换流器的虚拟电力系统,主持,台达科教基金委。
机电一体化专业专科毕业论文 电动机技术发展、工作原理及维护 :新庆 时间:2010年5月5日
引言 近几十年来,随着电力电子技术、微电子技术及现代控制理论的发展,中、小功率电动机在工农业生产及人们的日常生活中都有极其广泛的的应用。特别是乡镇企业及家用电器的迅速,更需要大量的中小功率电动机。由于这种电动机的发展及广泛的应用,它的使用、保养和维护工作也越来越重要。本文主要介绍了电动机技术发展及现状、工作原理、电动机的运行维护。 关键词:技术现状工作原理运行维护
第一章电动机技术发展及现状 电机是利用电磁感应原理工作的机械。随着生产的发展而发展的,反过来,电机的发展又促进了社会生产力的不断提高。从19世纪末期起,电动机就逐渐代替蒸汽机作为拖动生产机械的原动机,一个多世纪以来,虽然电机的基本结构变化不大,但是电机的类型增加了许多,在运行性能,经济指标等方面也都有了很大的改进和提高,而且随着自动控制系统和计算机技术的发展,在一般旋转电机的理论基础上又发展出许多种类的控制电机,控制电机具有高可靠性﹑好精确度﹑快速响应的特点,已成为电机学科的一个独立分支。 它应用广泛,种类繁多。性能各异,分类方法也很多。电动机的功能是将电能转换成机械能,它可以作为拖动各种生产机械的动力,是国民经济各部门应用最多的动力机械,也是最主要的用电设备,各种电动机消耗的电能占全国总发电量的60%-70%。另一种分类方法是按照电机的结构或转速分类,可分为变压器和旋转电机.根据电源电流的不同旋转电机又分为直流电机和交流电机两大类.交流电机又分为同步电机和异步电机。 在现代化工业生产过程中,为了实现各种生产工艺过程,需要各种各样的生产机械。拖动各种生产机械运转,可以采用气动,液压传动和电力拖动。由于电力拖动具有控制简单﹑调节性能好﹑耗损小﹑经济,能实现远距离控制和自动控制等一系列优点,因此大多数生产机械都采用电力拖动。 按照电动机的种类不同,电力拖动系统分为直流电力拖动
一年就这样过去了,内心思绪万千。 一年很短,备考的经历历历在目,一年很长,长到由此改变了一个人的轨迹,并且成就一个梦想。回忆着一年的历程,总想把它记录下来,希望可以给还在考研道路上奋斗的小伙伴们一点帮助。 考研是一个非常需要坚持的过程,需要你不断坚持和努力才能获得成功,所以你必须要想清楚自己为什么要考研,这一点非常重要,因为只有确认好坚定的动机,才能让你在最后冲刺阶段时能够坚持下来。 如果你只是看到自己周围的人都在考研而决定的考研,自己只是随波逐流没有坚定的信心,那么非常容易在中途就放弃掉了,而且现在考研非常火热,这就意味着竞争也会非常激烈,而且调剂的机会都会非常难得,所以备考时的压力也会比较大,所以大家一定要调整好心态,既不能压力太大,也不能懈怠。 既然选择了,就勇敢的走下去吧。 考研整个过程确实很煎熬,像是小火慢炖,但是坚持下来,你就会发现,原来世界真的是美好的。 文章整体字数较多,大家可视自己情况阅读,在文章末尾我也分享了自己备考过程中的资料和真题,大家可自行下载。 杭州电子科技大学国际商务专硕的初试科目为:(101)思想政治理论(204)英语二(303)数学三(434)国际商务专业基础 考试大纲: 第一部分国际贸易理论与政策
第一章国际贸易理论 第二章国际贸易政策与壁垒 第三章货物贸易与服务贸易 第四章区域经济一体化与多边贸易体制第二部分国际直接投资与跨国公司 第一章国际直接投资与跨国公司 第二章企业对外直接投资的战略决策 第三章对外直接投资的母国与东道国效应第三部分国际金融 第一章国际货币体系与汇率制度 第二章外汇市场、外汇业务与风险 第四章国际金融危机 第四部分国际商务环境与运营 第一章国际商务环境
我国集成电路发展状况 摘要 集成电路产业是知识密集、技术密集和资金密集型产业,世界集成电路产业发展异常迅速,技术进步门新月异。虽然目前中国集成电路产业无论从质还是从量来说都不算发达,但伴随着全球产业东移的大潮,中国的经济稳定增长,巨大的内需市场,以及充裕的各类人才和丰富的自然资源,可以说中国集成电路产业的发展尽得天时、地利、人和之势,将会崛起成为新的世界集成电路制造中心。 首先,本文介绍了集成电路产业的相关概念,并对集成电路产业的重要特点进行了分析。其次,在介绍世界集成电路产业发展趋势的基础上本文对我国集成电路产业发展的现状进行了分析和论述, 并给出了发展我国集成电路的策略。 集成电路产业是信息产业和现代制造业的核心战略产业,其已成为一些国家信息产业发展中的重中之重。相比于其它地区,中国是集成电路产业的后来者,但新世纪集成电路产业的变迁为中国集成电路产业的蚓起带来了机遇,如果我们能抓住这一有利时机,中国不仅能成为集成电路产业的新兴地区,更能成为世界集成电路产业强国。 关键词:集成电路产业;发展现状;发展趋势 ABSTRACT
Integrated circuit(IC) industry is of a knowledge,technology and capital concentrated nature. IC industry in the world develops extremely fast and the technology improves everyday.Although currently China’s IC industry is not fully developed,taking into consideration of either quality or quantity of the products.with the shifting of the global industry centre to the east and with the stable economic growth,enormous market demands and abundant human and nature resources available in China,the development of China’s IC industry has favourable conditions in all aspects.and it is expected that in the near future China will become tire new IC manufacturing centre in the world. Firstly, this paper introduce the concept of IC , and analysis the important points of it. Secondly, this paper introduces the developments of IC in the word especially in China. In the end, this paper gives some advices of the developments of IC in our country. The IC is the core of information industry and modern manufacturing strategic industries. IT has become some national top priority in the development of information industry. Compared with other regions, the latter of the China's integrated circuit industry, but the changes of the IC industry in the new century for China's integrated circuit industry vermis creates opportunity, if we can seize the favorable opportunity, China can not only a new region of the integrated circuit industry, more can become the integrated circuit industry in the world powers. Key words: IC current situations tendency 前言
电子招标投标现状及前景展望
作者: 日期:
电子招标投标现状及前景展望 发布时间:2013/4/20 信息来源:必联网 引言:“为落实中央惩防体系规划、工程专项治理,以及《招标投标法实施条例》关 于推进电子招标投标的要求,国家发改委会同国务院有关部门,在广泛调研的基础上形成了《电子招标投标办法》征求意见稿,向社会公开意见征求”--国家发改委关于《电子招标投标办法》 公开意见征求的公告。 国家发改委经过两次专家论证会以及广泛听取意见完成了《电子招标投标办法》的征求意见稿,作为一种简便快捷的采购方式及时岀台《办法》也是迫在眉睫的重要工作。随着互联网的广 泛使用以及各种软件系统技术的不断完善,采用电子招标投标方式进行招标采购的时机已经基本 成熟。《招标投标法实施条例》第五条“……国家鼓励利用信息网络进行电子招标投标”,作为一种鼓励的方式,电子招标投标通过技术手段在防止弄虚作假、暗箱操作、串通投标围标等方面 效果明显,特别在纸质招标与电子招标双轨并行的今天,鼓励电子招标投标与电子招标投标的实 施及规范电子招标投标已经成为业内当前十分重要的工作重点。 鼓励电子招标投标不能盲目跟从,现阶段还有很多的问题需要论证和检验。例如: 1、市场平台规模 一个市场平台的系统规模到底要多大?《招标投标法实施条例》第五条“设区的市级以上 地方人民政府可以根据实际需要,建立统一规范的招标投标交易场所,为招标投标活动提供服务。 招标投标交易场所不得与行政监督部门存在隶属关系,不得以营利为目的”。 《电子招标投标办法》征求意见稿(一下简称“征求意见稿”)的第四条没有规定最小区 域的设置。这里是否应该规定电子招标投标系统设置的最小区域为“设区的市级以上地方人民政府”。在实际工作中经常会碰到每个县都有自己的电子招标系统平台,各种软件五花八门、眼花 缭乱,具体项目实施时,易岀错、难管理,费时费力,直接违背了互联互通、安全高效的基本原则。其实各县都做电子平台系统实属浪费,违背招标活动的基本宗旨。推行电子招标应该让系统 尽量做大,以网络连接方式互通。全国联网对接目前如果有困难,最好先试点以省为一个区域系 统,不能再小于设区的市级。不然市场主体进入系统一个县一个平台,注册、备案、对接、身份认证,很是繁杂。 2、文件的标准化、格式化 电子招标投标应该遵循标准统一的原则。《征求意见稿》第二十条“数据电文形式的资格 预审公告、招标公告、资格预审文件、招标文件等应当标准化、格式化,并符合有关法律法规以及国家有关部门颁发的标准文本的要求”。但是,这里对文件的标准化、格式化的定义有些含糊。
江西渝州科技职业学院应用电子专科毕业论文 江西渝州科技学院 电子技术专业专科毕业论文题目:基于单片机数字时钟设计 作者姓名:赵玉江 学号: 2095040319 专业:电子信息工程技术 指导教师:黄方方 2011年12月
摘要 本设计以数字集成电路技术为基础、单片机技术为核心。软件设计模块化结构、C 语言编程。系统通过带字库的LCD12864显示数据,通过4*4矩阵键盘控制显示文字、公历日期(年、月、日、星期)、时间(时、分、秒)文字反白、自定义字符、图片显示,可以通过键盘调整时间、日期,温度,同时按下键盘时,七段数码管显示相应键位的键位标识。在内容安排上首先描述系统硬件工作原理,着重介绍了各硬件接口技术和各个接口模块的功能;其次,详细阐述了程序的各个模块和实现过程。 关键词: 单片机;数字温度日历表设计 Abstract The design is based on digital integrated circuit.microcontroller technology is the core of the system,The software design uses module structure,C programming language. System by taking the fonts LCD12864 display data, through 4 * 4 matrix keyboard control displays text, calendar dates (year, month, day, week), time (hour, minutes and seconds), word against white, customize characters, photos. Can via keyboard adjust time, date, and press the keyboard, 7 segment digital pipe display corresponding cryogenically keys logo. First the arrangement of the content of the system hardware principle are introduced, and the hardware interface technology and the function of each interface module, Secondly, this paper expounds the program modules and realization process. Key word: MCU; Keyboard display the simulation system;LCD12864;The clock
电子科技大学成人教育、网络教育本科生 毕业设计(论文)撰写规范 为了规范我校成人教育、网络教育本科学生撰写毕业设计(论文)的内容和格式,保证毕业设计(论文)的质量,特制定《电子科技大学成人教育、网络教育本科生毕业(论文)撰写规范》。 一、毕业设计(论文)资料的组成、填写与装订 1.毕业设计(论文)资料组成及装订按如下标准:封面→毕业设计(论文)任务书→毕业设计(论文)进度计划表→毕业设计(论文)中期检查记录表→摘要→目录→正文→结束语→谢辞→参考文献。毕业设计(论文)成绩考核表一式两份不装订,答辩结束评分后由指导教师上交办学单位或学习中心,由办学单位或学习中心统一上交总校。 2.毕业设计(论文)的各项资料应按要求认真填写或打印,手工填写的内容字迹要工整,卷面要整洁,一律用蓝黑墨水或黑墨水填写。 二、毕业设计(论文)撰写的内容与要求 一份完整的毕业设计(论文)应包括以下几方面。 1.题目 题目应简短、明确、有概括性。通过题目使读者大致了解毕业设计(论文)的内容、专业的特点和科学的范畴。标题字数要适当,一般不宜超过20字。 2.论文摘要 摘要又称内容提要,分为中文摘要和英文摘要,一般以300-500字为宜。它应以浓缩的形式概括研究课题的内容、方法和观点,以及取得的成果和结论,应能反映整个内容的精华。摘要后列出作者认为有利于检索和文献利用的关键词。 3.目录 目录一般按三级标题编写,要求标题层次清晰。目录中标题应与正文中标题一致。 4.正文 正文是作者对研究工作的详细表述。它占全文的绝大部分,其内容包括:问题的提出,研究工作的基本前提、假设和条件;基本概念和理论基础;摸型的建立,实验方案的拟定;基本概念和理论基础;设计计算的方法和内容;实验方法、内容及其分析;理论论证,理论在课题中的应用,课题得出的结果,以及结果的讨论等。学生要根据毕业设计(论文)课题的性质,一般情况下,正文可以仅包含上述的开展研究的见解与建议。 5. 结束语
应用电子技术专业毕业设计(论文)课题题目 一、光电计数器的设计 设计要求: 1、实现0―999围计数,能在超出最大值后溢出报警; 2、要求使用红外发光二极管、光电管检测; 3、能在设定值报警,能在报警后延时3秒钟自动关闭报警并自动重新 计数;可以手动清除报警; 4、要求光电发射管与接收管有1米以上的间距; 5、画出完整的电路原理图(包含电源部分)和PCB板图。 二、水温控制器的设计 1、水温能控制在25℃-60℃之间; 2、可以以2℃为步进调节,控制误差±2℃; 2、画出完整的电路原理图(包含电源部分)和PCB板图。 三、数字式可调稳压电源 1、用89C51系列单片机控制实现; 2、输出电压在0-24V之间可以任意调节,分辨率0.1V,输出电流最大1.5A; 3、整机效率>60% ; 4、画出完整的电路原理图(包含电源部分)和PCB板图,写出完整 的程序。
四、采用protel实现XX电路板的设计 1、画出完整的电路原理图、PCB板图; 2、“XX”指电路可以自拟,但要求元件数须大于50个(至少包含 一个多于40引脚的集成电路); 3、电路原理图、PCB板图必须同时有电子文件和纸质文件; 4、最好能通过工厂制作PCB实物; 5、详细叙述设计过程,包括必要的设计原则说明。 五、12v/220v车载逆变电源 1、实现DC12V到AC220V的转换,输出电流最大1A; 2、电压稳定率220V±5% 3、画出完整的电路原理图(包含电源部分)和PCB板图。 六、电子温度计的设计 1、温度测量围0℃~100℃,分辨率0.1℃; 2、测量值用LED数码管显示; 3、画出完整的电路原理图(包含电源部分)和PCB板图。 七、声光控制楼道灯开关 1、白天灯灭,晚上有声响时灯亮,延迟25秒后熄灭; 2、灯泡最大功率60W;
孙玲玲 女,1956年6月出生,1985年3月毕业于杭州电子工业学院,获电路与系统硕士学位。研究员,现任杭州电子科技大学副校长。“电路与系统”博士生导师;“电路与系统”、“微电子学与固体电子学”、“计算机应用”硕士生导师。国家特色专业“电子信息工程”专业负责人;浙江省重中之重学科“电路与系统”学科带头人。主讲的课程包括:集成电路CAD,近代网络理论, 微波集成电路计算机辅助设计 ,数字程控交换技术,射频/微波电路设计导论,VLSI设计导论、EDA技术等;指导本科学生工程训练和毕业设计数十人。主要研究方向:深亚微米及RF/微波IC设计及CAD方向、射频集成电路及应用系统研究等。主持国家自然科学基金、国家863计划、国防预研、国际合作等三十多项国家和省部级以上科研项目;已有20多项成果通过国家级和部省级专家技术鉴定或验收,并荣获浙江省科技进步二等奖、省教学成果二等奖等奖励;国务院特殊津贴获得者。近年已在电子学报等刊物和国际国内学术会议发表论文60余篇。兼任全国电子信息科学与工程类专业教学指导分委会委员;IFIP中国代表、中国电子学会理事;电子学报、微波学报编委,杭州电子科技大学学报主编等。 查丽斌 女,1964年1月出生,陕西西安人,副教授。1991年5月获西安交通大学硕士学位,曾主讲线性电子电路、电路原理、电路分析基础、电力系统分析、数字电路、模拟电路、电机原理及拖动技术、计算机控制原理、模拟电子技术实验课等课程。指导本专科学生毕业设计数十人,有近20年的教学经验,教学责任心强,教学效果良好。主要研究方向:地理信息系统(GIS),教育软件的开发。公开发表论文若干篇,主编出版了教材<<电路与模拟电子技术基础〉〉。 柴曙华 男,浙江大学电机系毕业,实验师。1978年毕业后一直从事实验教学工作。80年先后和同事们完成了电工实验室的筹建、教材编写、实验项目改革的任务。2000年后参与完成了下沙校区电工、电路、信号与系统综合实验室筹建、扩建等工作。先后从事〈〈电工学实验〉〉、〈〈电路分析实验〉〉、〈〈电路电子学实验〉〉、〈〈模拟电子线路实验〉〉、〈〈线路实习〉〉、〈〈电子线路CAD〉〉、〈〈信号与系统实验〉〉、〈〈电机修理〉〉、〈〈中国竹笛〉〉等课程教学。教学责任心强,教学效果良好。 陈瑾 女,硕士学位,讲师,通信电子电路课程负责人。毕业于杭州电子工业学院,获电路与系统专业工学硕士,研究方向为模拟集成电路故障诊断。毕业留校任教至今,主讲《通信电子电路》、《模拟电子电路》和《电子测量》等课程,并指导《电子线路CAD》和《通信电子电路实验》、毕业设计等实践性环节。曾负责校级“电子类专业基础课程群建设”课题中《非线性电子线路》课程的建设,制作并完成该课程的网上辅导系统、答疑系统及题库的建设等。有十多年高校教学经验,教学责任心强,教学作风严谨、细致,教学效果优良,曾在原三分院主办的“青年教师讲课基本功比赛”中荣获二等奖中第一名,03年在国家教委本科教学评估中受到听课专家的好评。参与完成1项国家“八五”攻关项目及多项横向课题,编著并
论电子招投标的发展及建议 论电子招投标的发展及建议 摘要:电子招投标是近年来快速发展起来的一项全新业务形态,它的兴起使招投标的效率有了很大的提高,也对招投标活动的服务和管理的变化有着决定性的影响,对于进一步规范招投标市场有着非常关键的作用。然而从不同地区的具体使用情况来看,该项工作依然存在许多技术、制度层面的问题,本文依据对电子招投标现状和发展研究的阐述,找出其中存在的问题,之后本文会根据这些问题提出一些有效的措施,希望能够对电子招投标进一步发展有一定的帮助。 关键词:电子招投标; 发展; 建议 电子招投标是利用互联网信息技术,对招投标开始再次整理的工作,进一步完善重组的工作程序,在互联网上实施招标、投标、检查等连续性的动作,最后达到高效、规范、安全和低成本的目的【1】。此项工作的运用很大程度上加快了招投标业务的进行,在许多层面减少了很大的工作量。所以,拥有一个规范、完善的电子招投标平台,形成具有程序化的电子招投标,是招投标健康、迅速发展的必然选择。 一、电子招投标的发展现状 电子招投标在我国实践运用中至今为止取得了比较突出的成绩,到现在为止,招标投标主
体存在的一些难题都得到了解决,完全可以鼓励使用电子招标投标,扩大使用该项目的范围,增加对它的宣传,进一步提高它的技术的条件已经具备。专业的工作人员提出了一些意见,监督招标投标的部门一定要尽快抛弃对于电子招标投标不放心、不积极的态度,对于该项工作的进行一定要充满信心,大胆尝试,必须要完全了解使用电子招投标仅仅是改变了监督的方式,没有更改原有的监督的职能。国家的每个部门必须要作为积极推行该项目的中坚力量,促进它的进一步发展。根据不同的地区使用电子招投标的具体实践成果来看,有了很多有成效的成果,比如说提高了效率、很大程度上减少了资源消耗和成本。然而,它现在依旧存在着很多的问题。 (一)系统不具有稳定性 电子招投标的安全性和稳定性问题一直都引起人们很多的关注,该系统的发展因为没有统一标准,每个研发之间不能互相融合,这就导致使用此系统的人必须购买所有的相关系统,使用者不得不使用多个资源去搭配每个不同的系统; 该项目在使用过程中没有严格的制度作为保障,如招标投标流程是否实用,是否能阻止非法的手段,还涉及主体身份识别和信息是否能安全等。这些问题导致了目前电子招标投标系统都存在“拆迁重建”的可能性【2】。而且,电子招投标对数据安全性、公正性、保密性要求相当高。完善合理的电子招标系统能够使招标过程更加透明,然而没有完整的规章制度作为保障的电子招标系统则能导致招标过程不合法、结果不合理。研制该系统的企业、系统监管人员比之前的招标方式拥有更大腐败的可能性,利用技术手段使招投标更容易被自己掌控。 (二)信息透明度缺失
盐城纺织职业技术学院毕业设计 基于单片机的99马表设计 黄晓芳 班级:电子512 专业:应用电子技术 所在系:机电工程系 学号:053052111 指导老师:罗文华 完成时间2008年4月10日至2008年6月18日
目录 摘要: (3) 引言: (4) 第一章单片机的发展与应用 (5) 1.1、单片机的发展 (5) 1.1.1、单片机的概念 (5) 1.2、MCS-51单片机的简介 (5) 第二章基于单片机AT89C51的99马表硬件系统 (9) 2.1、基于单片机AT89C51的99马表原理 (9) 2.1.1、主要功能: (9) 2.1.2、系统板上硬件连线 (10) 2.2、AT89S51的介绍 (10) 2.2.1、主要特性 (11) 2.2.2、管脚说明 (11) 2.2.3、振荡器特性 (13) 2.2.4、芯片擦除 (13) 2.3、基于AT89S51的99马表外围电路设计 (14) 2.3.1、复位电路 (14) 2.3.2、时钟电路 (16) 2.3.3、数码管 (16) 2.3.4、键盘电路 (19) 第三章基于AT89S51的99马表软件系统 (21) 3.1、基于单片机AT89S51的99马表汇编程序 (21) 3.1.1、基于单片机AT89S51的99马表流程图 (21) 3.1.2、基于单片机AT89S51的99马表汇编程序 (22) 3.2、K EIL U V ISION2集成开发环境介绍 (26) 3.2.1、keil的使用步骤 (26) 3.4仿真软件P ROTEUS (28) 3.4.1、基于Proteus软件的系统硬件仿真设计 (28) 3.4.2、基于Proteus软件的系统硬件仿真运行 (29) 3.5、硬件系统的设计 (29) 3.5.1、Protel DXP概述 (29) 3.5.2、原理图设计系统的特点 (29) 3.5.3、印制电路板(PCB)的设计系统的特点 (31) 第四章小结与展望 (32) 4.1、小结 (32) 4.2、全文展望 (32) 致谢 (33) 参考文献 (34)