设计 计算
液压挖掘机作业稳定性的计算
徐州工程机械研究所 赵家宏 吴先明
内容摘要:本文用合力轨迹圆法对挖掘机的作业稳定性进行了计算,认为对于有多条倾覆边,特别是非矩形支撑面,采用此法并利用计算机计算稳定性更为全面而简单。
关键词:挖掘机 稳定性 合力轨迹圆
1 概述
挖掘机在作业过程中,有挖掘和卸载两种
失稳状态,而每种失稳状态又有几种工况,若一
一进行分析计算,既繁琐也不全面。本文以具有
两只刚性支腿的轮胎式挖掘机为例,试图用合
力轨迹圆法将其综合起来考虑。
2 各部件的重心位置和斗齿尖坐标方程
由于工作液压缸的伸缩使工作装置的姿态
不断发生变化,从而各构件的重心及斗齿尖的
坐标也在不断变化,实际上,它们是液压缸行程
或长度的函数,更重要的是斗齿尖上由工作液
压缸所产生的挖掘力也是这样的函数(这一函
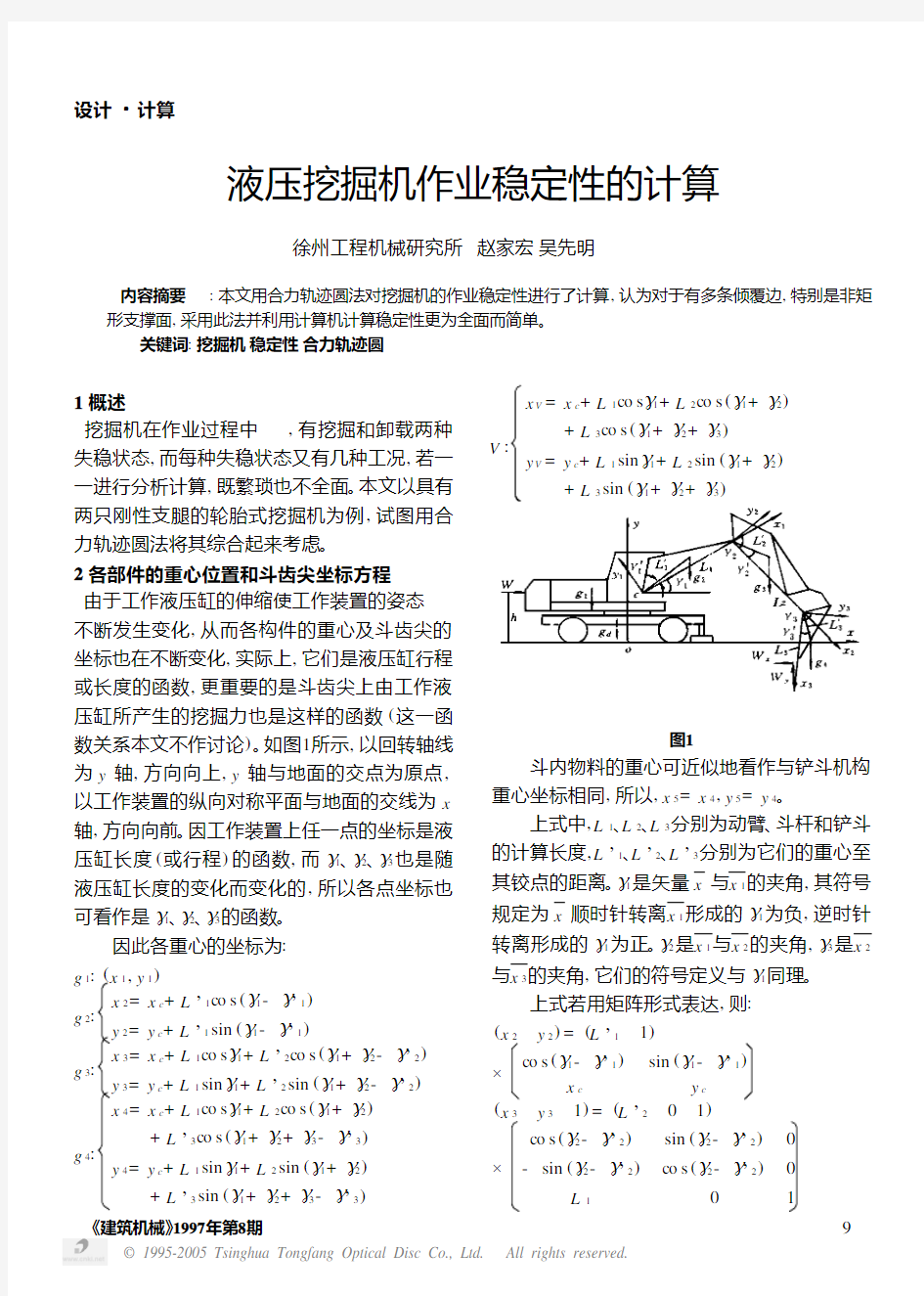
数关系本文不作讨论)。如图1所示,以回转轴线
为y轴,方向向上,y轴与地面的交点为原点,
以工作装置的纵向对称平面与地面的交线为x
轴,方向向前。因工作装置上任一点的坐标是液
压缸长度(或行程)的函数,而Χ1、Χ2、Χ3也是随
液压缸长度的变化而变化的,所以各点坐标也
可看作是Χ1、Χ2、Χ3的函数。
因此各重心的坐标为:
g1:(x1,y1)
g2:x2=x c+L’1co s(Χ1-Χ’1) y2=y c+L’1sin(Χ1-Χ’1)
g3:x3=x c+L1co sΧ1+L’2co s(Χ1+Χ2-Χ’2)
y3=y c+L1sinΧ1+L’2sin(Χ1+Χ2-Χ’2)
g4:x4=x c+L1co sΧ1+L2co s(Χ1+Χ2)
+L’3co s(Χ1+Χ2+Χ3-Χ’3)
y4=y c+L1sinΧ1+L2sin(Χ1+Χ2)
+L’3sin(Χ1+Χ2+Χ3-Χ’3)
V:
x V=x c+L1co sΧ1+L2co s(Χ1+Χ2)
+L3co s(Χ1+Χ2+Χ3)
y V=y c+L1sinΧ1+L2sin(Χ1+Χ2)
+L3sin(Χ1+Χ2+Χ3)
图1
斗内物料的重心可近似地看作与铲斗机构
重心坐标相同,所以,x5=x4,y5=y4。
上式中,L1、L2、L3分别为动臂、斗杆和铲斗
的计算长度,L’1、L’2、L’3分别为它们的重心至
其铰点的距离。Χ1是矢量x与x1的夹角,其符号
规定为x顺时针转离x1形成的Χ1为负,逆时针
转离形成的Χ1为正。Χ2是x1与x2的夹角,Χ3是x2
与x3的夹角,它们的符号定义与Χ1同理。
上式若用矩阵形式表达,则:
(x2 y2)=(L’1 1)
×
co s(Χ1-Χ’1)
x c
sin(Χ1-Χ’1)
y c
(x3 y3 1)=(L’2 0 1)
×
co s(Χ2-Χ’2)sin(Χ2-Χ’2)0
-sin(Χ2-Χ’2)co s(Χ2-Χ’2)0
L101
《建筑机械》1997年第8期
×
co sΧ1sinΧ10 -sinΧ1co sΧ10 x c y c1
(x4 y4 1)=(L’3 0 1)
×
co s(Χ3-Χ’3)sin(Χ3-Χ’3)0 -sin(Χ3-Χ’3)co s(Χ3-Χ’3)0 L201
×
co sΧ2sinΧ20
-sinΧ2co sΧ20
L101
co sΧ1sinΧ10
-sinΧ1co sΧ10
x c y c1
(x V y V1)=(L301)
co sΧ3sinΧ30 -sinΧ3co sΧ30 L201
×
co sΧ2sinΧ20
-sinΧ2co sΧ20
L101
co sΧ1sinΧ10
-sinΧ1co sΧ10
x c y c1
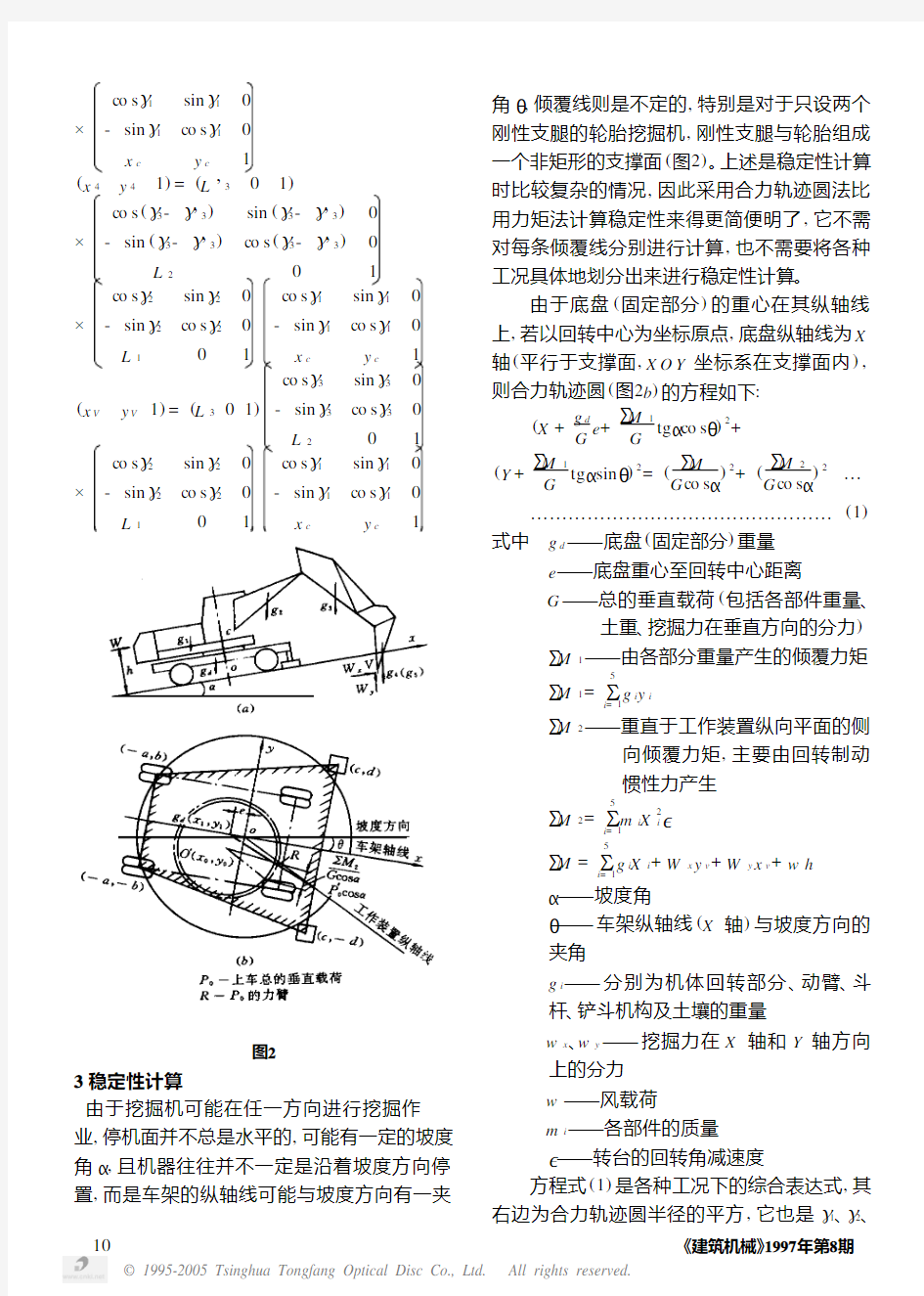
图2
3 稳定性计算
由于挖掘机可能在任一方向进行挖掘作业,停机面并不总是水平的,可能有一定的坡度角Α,且机器往往并不一定是沿着坡度方向停置,而是车架的纵轴线可能与坡度方向有一夹角Η,倾覆线则是不定的,特别是对于只设两个刚性支腿的轮胎挖掘机,刚性支腿与轮胎组成一个非矩形的支撑面(图2)。上述是稳定性计算时比较复杂的情况,因此采用合力轨迹圆法比用力矩法计算稳定性来得更简便明了,它不需对每条倾覆线分别进行计算,也不需要将各种工况具体地划分出来进行稳定性计算。
由于底盘(固定部分)的重心在其纵轴线上,若以回转中心为坐标原点,底盘纵轴线为X 轴(平行于支撑面,X O Y坐标系在支撑面内),则合力轨迹圆(图2b)的方程如下:
(X+g d
G
e+
2M1
G
tgΑco sΗ)2+
(Y+
2M1
G
tgΑsinΗ)2=(
2M
G co sΑ
)2+(
2M2
G co sΑ
)2…
(1)
…………………………………………
式中 g d——底盘(固定部分)重量
e——底盘重心至回转中心距离
G——总的垂直载荷(包括各部件重量、
土重、挖掘力在垂直方向的分力) 2M1——由各部分重量产生的倾覆力矩
2M1=25
i=1
g i y i
2M2——重直于工作装置纵向平面的侧
向倾覆力矩,主要由回转制动
惯性力产生
2M2=25
i=1
m i X2iΕ
2M=25
i=1
g i X i+W x y v+W y x v+w h
Α——坡度角
Η——车架纵轴线(X轴)与坡度方向的
夹角
g i——分别为机体回转部分、动臂、斗
杆、铲斗机构及土壤的重量
w x、w y——挖掘力在X轴和Y轴方向
上的分力
w——风载荷
m i——各部件的质量
Ε——转台的回转角减速度
方程式(1)是各种工况下的综合表达式,其右边为合力轨迹圆半径的平方,它也是Χ1、Χ2、
《建筑机械》1997年第8期
Χ3的函数,只要最大的合力轨迹圆完全包容在倾覆线以内,说明机器是稳定的。
下面就典型工况对(1)式作一说明:
(1)当挖掘机停置在水平地面上进行挖掘作业时,Α=0,Η=0(当Α=0时,Η已无意义)无惯性载荷 2M2=0
i=1,2,3,4(不计土重)
则方程式(1)变为:
(X+g d
G e)2+Y2=(
2M
G
)2(2)
……………
(2)卸载失稳状态,这里有两种工况:
a)挖掘机停在斜坡上,满斗且幅度最大,工作装置位于下坡方向,且Η=90°(机器横向停在斜坡上)。此时,w x=0、w y=0,2M2=0(无惯性载荷),i=1,2,3,4,5。则方程式(1)变为:
(X+g d
G e)2+(Y+
2M1
G
tgΑ)2=(
2M
G co sΑ
)2
(3)
…………………………………………
b)与工况a)不同的是工作装置与车架轴线在同一方向上,且此时转台紧急制动。则方程式(1)变为:
(X+g d
G e)2+(Y+
2M1
G
tgΑ)2=(
2M
G co sΑ
)2+
(
2M2
G co sΑ
)2(4)
……………………………………
其它各种工况都可由方程式(1)进行计算,
只是应根据各工况的具体情况代入相应的参数。将方程式(1)与前述的各部件重心计算矩阵方程联系起来,编制成计算软件系统,可方便快捷地得到各种工况下的稳定性计算结果。
当机器在一坡道上(或者说支撑面是非水平状态)任意方向停置进行作业时(Α≠0,Η≠0),由于各载荷的分力影响使得方程式(1)很复杂,我们可以换一种形式来分析,如果假设机器仍在水平地面上作业,并以回转中心为原点,车架纵轴线为X轴(X O Y坐标系在水平面内),则可得到较简明的合力轨迹圆方程:
(X+g d
G
e)2+Y2=
(2M)2+(2M2)2
G2
(5)
………
式(5)是各工况下的综合表达式,其中参数的意义同上。
问题的关键是此时的稳定支撑面(假想的)应是机器在坡道上的实际支撑面在X O Y平面内的投影面积,它比实际支撑面积小,形状也改变了,它由X O Y坐标系内四条假想的倾覆线(直线方程式推导省略)所围成的:
L1: Y=K1X+C
L2: Y=K2X+
ad+bc
a+c
L3: Y=K3X-a
L4: Y=K4X-
ad+bc
a+c
式中 K1=tg
2Ηco sΑ
tgΗ-tgΗco sΑ
K2=(d-b)+(a+c)tgΗ-tgΗco sΑ〔(a+c)-(d-b)tgΗ〕co s〔(a+c)-(d-b)tgΗ〕+tgΗ〔(d2b)+(a+c)tgΗ〕
K3=K1
K4=(b-d)+(a+c)tgΗ-tgΗco sΑ〔(a+c)-(b-d)tgΗ〕co s〔(a+c)-(b-d)tgΗ〕+tgΗ〔(b2d)+(a+c)tgΗ〕
显然当由方程式(5)决定的合力轨迹圆完全包容在由L1、L2、L3、L4四条直线所围成的区域内时,机器是稳定的。将上述数学模型编制成软件系统,并利用计算机自动绘出图形,能很直观地看到计算结果。我们在挖掘机的产品设计过程中利用上述两种方法进行稳定性校核,效果令人很满意,与用力矩法计算得出的结论完全相同。合力轨迹圆法实际上也同样适合于履带式挖掘机的稳定性校核。
参 考 文 献
[1] 同济大学主编:单斗液压挖掘机1北京:中国建筑
工业出版社,1986
[2] 赵家宏:液压挖掘机反铲装置的优化设计1建筑
机械,1996(10)
作者地址:江苏省徐州市铜山路50号
邮政编码:221004
收稿日期:199711113
CONS TRUC T I O N MACHI N ERY
No18 1997
A bs tra c ts a nd Ke yw o rds
Ca lcula tion of W ork i ng Stability of Hydraulic Excava tor
T h is paper calcu lates w o rk ing stab ility of excavato r w ith m ethod of resu ltan t locu s circle.T he w riter con siders that there are m u lti p le overtu rn sides1Particu larly,it is si m p le and all2round to u se th is m ethod to calcu late stab ili2 ty by compu ter if the suppo rt su rface is non2rectangu lar1
Key words:excava tor stability resultan t locus c ircle
New D esign of Electr ica l Con trol Syste m for Tower Crane F0 23B
P rogramm ing L anguage Con tro l(PL C)is developed on the base of relay and compu ter con tro l1Its key po in t is m icrop rocesso r1It is au tom atic con tro l device of new indu stry w h ich is in tegrated w ith au tom ati on,compu ter and comm un icati on techno logy1It is trend of electrical con tro l system fo r tow er crane to u se good functi on,h igh relia2 b ility,in terchangeab le characteristic and easy app licati on P rogramm ing L anguage Con tro l1It is new w ay to m ake con tro l device of tow er crane better,also,it is effective w ay to i m p rove the quality of p roducts1
Key words:Programm i ng Language Con trol co m bi na ti ng con trol RCS ho istm echan is m sof tware poten-ti a l energy load
Technology Pr i nc iples and Equip m en ts Selection of Slipfor m Paver
A cco rding to m any h ighw ay engineering experi m en ts in ou r coun try to con struct cem en t concrete pavem en ts w ith sli pfo rm pavers,and a lo t of in ternal and ex ternal references,the techno logy p rinci p les and selecti on equ i p2 m en ts of sli pfo rm pavers to con struct cem en t concrete pavem en ts are in troduced in th is paper1It no t on ly has i m2 po rtan t gu idance sign ificance fo r con structi on un its to choo se the sli pfo rm pavers,bu t also has reference values fo r in ternal and ex ternal m anufactu rers to p roduce and revo lu ti on ize the sli pfo rm pavers,and to m ake it mo re su itab le fo r Ch inese h ighw ays and airpo rts p ro jects to con structi on1
Key words:slipfor m paver technology pr i nc iples selection equip m en ts ce m en t concrete pave m en ts h igh-way
Study and Applica tion of D esign I nfor ma tion M anage m en t Syste m
T he design info rm ati on system fo r m echan ical and electrical p roducts is discu ssed in the paper1A n app licati on of WWW to the design gu ide of fan is in troduced1T he fo rm al and info rm al design info rm ati on of fan are p rop rely sto red and linked in the gu ide1T he gu ide can help engineer to app ly concu rren t engineering and access the info rm a2 ti on in the design stage1
Key words:design i nfor ma tion syste m WWW fan design
Ed ited by:Edito rial O ffice of CON STRU CT I ON M A CH I N ER Y
Address:21Fangjia H u tong,A ndingm en N ei,B eijing,Ch ina
Ch ief Ed itor:Zhang Sh iying Tel:(010)64019167 Fax:(010)64017647
Genera l D istr ibutor:Ch ina In ternati onal Book T rading Co rp,P1O1Box399,B eijing,Ch ina
D istr ibuti ng Code:M4327 ISSN1001-554X
挖掘机操作规程(新编版) The safety operation procedure is a very detailed operation description of the work content in the form of work flow, and each action is described in words. ( 安全管理 ) 单位:______________________ 姓名:______________________ 日期:______________________ 编号:YK-AQ-0313
挖掘机操作规程(新编版) 1.挖掘机驾驶员及有关人员在使用挖掘机之前,必须认真仔细地阅读制造企业随机提供的使用维护说明书或操作维护保养手册,按资料规定的事项去做。否则会带来严重重果和不必要的损失。 2.检查并确保所有灯具的照明及各显示灯能正常显示。特别要检查转向灯及制动显示灯的正常显示。 3.作业前,应查明施工场地明、暗设置物(电线、地下电缆、管道、坑道等)的地点及走向,并采用明显记号表示。严禁在离电缆1m距离以内作业。 4.挖掘作业前应先将朝地,并使前轮稍离开地面,踏下并锁住制动踏板,然后伸出支腿,使后轮离地并保持水平位置。 5.作业时,操纵手柄应平稳,不得急剧移动;动臂下降时不得中途制动。挖掘时不得使用高速挡。
6.回转应平稳,不得撞击并用于砸实沟槽的侧面。 7.动臂后端的缓冲块应保持完好;如有损坏时,应修复后方可使用。 8.移位时,应将挖掘装置处于中间运输状态,收起支腿,提起提升臂后方可进行。 9.装载作业前,应将挖掘装置的回转机构置于中间位置,并用拉板固定。 10.挖掘作业,应使用低速挡。 11.铲斗提升臂在举升时,不应使用阀的浮动位置。 12.在前四阀工作时,后四阀不得同时进行工作。 13.在行驶或作业中,除驾驶室外,挖掘装载机任何地方均严禁乘坐或站立人员。 14.行驶中,不应高速和急转弯。下坡时不得空挡滑行。 15.行驶时,支腿应完全收回,挖掘装置应固定牢靠,装载装置宜放低,铲斗和斗柄液压活塞杆应保持完全伸张位置。 16.当停放时间超过1h时,应支起支腿,使后轮离地;停放时
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 2020版液压挖掘机的操作规程 Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
2020版液压挖掘机的操作规程 作业前的技术准备 1)发动机部分,按通用操作规程的有关规定执行。 2)发动机启动或操作前应发出信号。 3)检查液压系统有无渗漏;轮胎式挖掘机应检查其轮胎是否完好、气压是否符合规定;检查传动装置、制动系统、回转机构及仪器、仪表、并经试运转,确认正常后方允许进入作业状态。 4)详细了解施工任务和现场情况。检查挖掘机停机处土壤的坚实性和稳定性,轮胎式挖掘机应加支撑,以保持其平稳、可靠。检查路堑和沟槽边坡的稳定情况,防止挖掘机倾覆。 5)严禁区任何人员在挖掘机作业区内滞留。禁止无关人员进入驾驶室。 6)挖掘机作业现场应有自卸车进出的道路。
作业与行驶中的技术要求 1)挖掘机作业时禁止任何人上、下挖掘机和传递物品,不准边作业边保养、维修;不要随意调整发动机(调速器)以及液压系统、电控系统;要注意选择和创造合理的作业面,严禁掏洞挖掘。 2)挖掘机卸料时应待自卸车停稳后进行;卸料时在不碰撞自卸车任何部位的情况下,应昼降低铲斗高度;禁铲斗从自卸车驾驶室上方越过。 3)禁止利用铲斗击碎坚固物体;如遇到较大石块或坚硬物体时,应先清除后继续作业;禁止挖掘示经爆破的5级以上的岩石。 4)禁止将挖掘机布置在上、下两个挖掘段内同时作业;挖掘机在工作面内移动时应先平整地面,并清除通道内的障碍物。 5)禁止用铲斗油缸全伸出方法顶起挖掘机。铲斗没有离开地面时挖掘机不能作横行行驶或回转运动。 6)禁止用挖掘机动臂横向拖拉他物;液压挖掘机不能用冲击方法进行挖掘。 7)挖掘机在作回转运动时,不能对回转手柄作相反方向的操作。
400x1600梁模板支架计算书一、梁侧模板计算 (一)参数信息 1、梁侧模板及构造参数 梁截面宽度 B(m):;梁截面高度 D(m):; 混凝土板厚度(mm):; 采用的钢管类型为Φ48×3; 次楞间距(mm):300;主楞竖向道数:4; 穿梁螺栓直径(mm):M12; 穿梁螺栓水平间距(mm):600; 主楞材料:圆钢管; 直径(mm):;壁厚(mm):; 主楞合并根数:2; 次楞材料:木方; 宽度(mm):;高度(mm):; 2、荷载参数
新浇混凝土侧压力标准值(kN/m2):; 倾倒混凝土侧压力(kN/m2):; 3、材料参数 木材弹性模量E(N/mm2):; 木材抗弯强度设计值fm(N/mm2):;木材抗剪强度设计值fv(N/mm2):; 面板类型:胶合面板;面板弹性模量E(N/mm2):; 面板抗弯强度设计值fm(N/mm2):; (二)梁侧模板荷载标准值计算 =m2; 新浇混凝土侧压力标准值F 1 (三)梁侧模板面板的计算 面板为受弯结构,需要验算其抗弯强度和刚度。强度验算要考虑新浇混凝土侧压力和倾倒混凝土时产生的荷载;挠度验算只考虑新浇混凝土侧压力。 面板计算简图(单位:mm) 1、强度计算 面板抗弯强度验算公式如下: σ = M/W < f 其中,W -- 面板的净截面抵抗矩,W = 150××6=81cm3; M -- 面板的最大弯矩(N·mm); σ -- 面板的弯曲应力计算值(N/mm2) [f] -- 面板的抗弯强度设计值(N/mm2); 按照均布活荷载最不利布置下的三跨连续梁计算:
M = 1l+ 2 l 其中,q -- 作用在模板上的侧压力,包括: 新浇混凝土侧压力设计值: q 1 = ×××= kN/m; 倾倒混凝土侧压力设计值: q 2 = ××4×=m; 计算跨度(次楞间距): l = 300mm; 面板的最大弯矩 M= ××3002+××3002= ×105N·mm; 面板的最大支座反力为: N= 1l+ 2 l=××+××=; 经计算得到,面板的受弯应力计算值: σ = ×105/ ×104=mm2; 面板的抗弯强度设计值: [f] = 15N/mm2; 面板的受弯应力计算值σ =mm2小于面板的抗弯强度设计值 [f]=15N/mm2,满足要求! 2、抗剪验算 Q=××300+××300)/1000=; τ=3Q/2bh=3××1000/(2×1500×18)=mm2; 面板抗剪强度设计值:[fv]=mm2; 面板的抗剪强度计算值τ=mm2小于面板的抗剪强度设计值 [f]=mm2,满足要求! 3、挠度验算 ν=(100EI)≤[ν]=l/150 q--作用在模板上的侧压力线荷载标准值: q=×; l--计算跨度: l = 300mm; E--面板材质的弹性模量: E = 6000N/mm2; I--面板的截面惯性矩: I = 150×××12=72.9cm4; 面板的最大挠度计算值: ν = ××3004/(100×6000××105) = 0.722 mm; 面板的最大容许挠度值:[v] = min(l/150,10) =min(300/150,10) = 2mm; 面板的最大挠度计算值ν =0.722mm 小于面板的最大容许挠度值 [v]=2mm,满
液压挖掘机行走操作及安全使用注意事项示范文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
液压挖掘机行走操作及安全使用注意事 项示范文本 使用指引:此管理制度资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 1)挖掘机起步前应检查环境安全情况、清理道路上的 障碍物,无关人员离开挖掘机,然后提升铲斗。 2)准备工作结束后驾驶员应先按喇叭,然后操作挖掘 机起步。 3)行走杆操作之前应先检查履带架的方向,尽量争取 挖掘机向前行走。如果驱动轮在前,行走杆应向后操作。 4)如果行走杆在低速范围内挖掘机起步,发动机转速 会突然升高,因此驾驶员要小心操作行走杆菌。 5)挖掘机倒车时要留意车后空间,注意挖掘机后面盲 区,必要时请专人指挥予以协助。 6)液压挖掘机行走速度——高速或低速可由驾驶员选
择。当选择开关在“0”位置时,挖掘机将低速、大扭矩行走;当选择开头在“1”位置时,挖掘机行走速度将根据液压行走回路工作压力而自动升高或下降。例如,挖掘机在平地上行走可选择高速;上坡行走时可选择低速。如果发动机速度控制盘设定在发动机中速(约1400r/min)以下,即使选择开关在“1”位置上,挖掘机仍会以低速行走。 7)挖掘机应尽可能在平地上行走,并避免上部转台自行放置或操纵其回转。 8)挖掘机在不良地面上行走时应避免岩石碰坏行走马达和履带架。泥砂、石子进入履带会场影响挖掘机正常行走及履带的使用寿命。 9)挖掘机在坡道上行走时应确保履带方向和地面条件,使挖掘机尽可能直线行驶;保持铲斗离地20-30cm,如果挖掘机打滑或不稳定,应立即放下铲斗;当发动机在
一、目的 为规范挖掘机的操作,特制定本操作手册。 二、适用范围 适用于公司所有施工项目挖掘机操作人员管理。 三、岗位职责 1、负责挖掘机的操作; 2、负责挖掘机的维护保养和修理; 3、负责根据生产任务完成采装任务; 4、负责本岗位存在的危险源以及管控措施。 四、上岗准备 1、劳保用品的配备 佩戴安全帽,穿工作服,戴防尘口罩,夜班作业人员要穿反光衣、佩戴手电筒、和对讲机 2、检查对讲机工作状态是否正常,每班下班后要将对讲机进行充电; 3、携带上岗证、特种作业操作证。 五、管理内容 1.挖掘机的操作及安全注意事项 .操作之前 1.1.1启动发动机前必须做到:检查燃油、机油和润滑油,检修或调整机械,铲斗必须搁在地面上,轻轻摇晃控制杆以释放液压系统中的压力,将所有控制杆置于中位; 操作过程中: 1.2.1严禁在铲斗支起机身时进入机身下面; 1.2.2当人离开司机室时,铲斗必须搁至地面; 1.2.3当暂时停车于斜坡时,需放下铲斗,在履带下垫斜块,各控制杆置于中位。 1.2.4当挖掘机行驶或工作时,禁止上下车; 1.2.5不得借助铲斗顶住地面以推动挖掘机或利用挖掘机自重来挖掘; 1.2.6当铲斗在地面上受到阻力的时候不要进行行走或回转; 1.2.7不要利用设备的自重增加设备的挖掘力;
1.2.8当在靠近悬崖边作业时,确保机械所处的地面坚固,应使行走马达在设备的后方; 1.2.9机械与空中的供电线间应保持足够的距离; 1.2.10在高速行走挡内,不要快速操作行走杆,①避免突然的启动;②在倒车以前,必须先使前进方向的动作完全停止,前后操作行走杆时,不要使挖掘机受到冲击;③避免突然的制动手动控制杆回至中位不要让其自动弹回中位。 1.2.6不要用回转力来刮平地面或撞击物体,也不要将铲斗作为锤子或打桩器使用,如此操作将损坏挖掘机或缩短其寿命。 1.2.7不要使液压油缸连续全部伸出,如果油缸完全地伸缩会使机器发生损坏。 2.挖掘机的维护保养和修理; 维护保养的主要内容: 2.1.1清洁:随时擦洗,清除机器上的油污和尘土,保持外观清洁;同时定期清洗滤清器; 检查:在挖掘机作业前、中、后进行常规性的看、听、摸和试操作,判断各部分是否工作正常; 紧固:挖掘机工作过程中产生振动,使联接螺栓、销等松动,甚至出现扭断、分离、失控等事故。一旦发现联接松动,必须及时拧紧; 调整:各零部件配合有关间隙要及时进行调节和修整,使其保持灵活可靠。如履带的张紧度、机罩门盖等; 润滑:根据挖掘机各润滑点的要求,按时加注或更换润滑油,使零件运行摩擦最小; 防腐:做到防水、防酸、防潮和防火等,防止机器各部分遭到腐蚀; 更换:液压挖掘机的易损零件,一旦失效应马上更换。如滤清器的纸质滤芯、铲斗斗齿、O型圈、胶管等易损件。 维护保养的类型 液压挖掘机的维护保养分为例行保养、定期保养和特定保养三种。 例行保养:也叫日常保养,是在工作前、中、后进行的保养,以外部清洁、检查、紧固为重点;
脚手架的抗倾覆验算与稳定性计算[摘要]当模板支架、施工用操作架等脚手架不设连墙杆时,必须首先对脚手架进行抗倾覆验算,然后才是强度、刚度和稳定性计算。而现行的国家标准中没有倾覆验算和稳定性验算内容。根据国家有关标准导出了脚手架倾覆验算公式,并有2个算例辅以说明。最后指出脚手架高宽比与脚手架的倾覆有关,与脚手架稳定性承载能力无关。 [关键词]脚手架;倾覆;稳定性;验算 结构设计中,“倾覆”与“稳定”这两个含义是不相同的,设计时都应考虑。《建筑结构可靠度设计统一标准》gb50068-2001第3.0.2条第一款规定承载能力极限状态包括:“①整个结构或结构的一部分作为刚体失去平衡(如倾覆等)……。④结构或结构构件丧失稳定(如压屈等)”。可见它们同属于承载能力极限状态,但应分别考虑。《建筑结构设计术语和符号标准》gb/t 50083-97,对“倾覆”和“稳定”分别作出了定义,并称“倾覆验算”和“稳定计算”。《建筑地基基础设计规范》gb50007-2002,关于地基稳定性计算就是防止地基整体(刚体)滑动的计算。《砌体结构设计规范》gb50003-2001对悬挑梁及雨篷的倾覆验算都有专门规定。施工现场的起重机械在起吊重物时也要做倾覆验算。对于脚手架,由于浮搁在地基上,更应该做倾覆验算。 《建筑施工扣件式钢管脚手架安全技术规范》jgj130-2001及《建筑施工门式钢管脚手架安全技术规范》jgj128-2000中都没有
倾覆验算的内容,这是因为这两本规范规定的脚手架都设置了“连墙杆”,倾覆力矩由墙体抵抗,因此就免去了倾覆验算。如果不设连墙杆,则脚手架的倾覆验算在这两本规范中就成为不可缺少的内容了。所以,对于模板支架、施工用的操作架等无连墙杆的脚手架,首先应保证脚手架不倾覆而进行倾覆验算,然后才是强度、刚度和稳定性计算。如果需要,还可进行正常使用极限状态计算。 1脚手架的倾覆验算 1.1通用的验算公式推导 无连墙杆的脚手架,作为一个刚体应按如下表达式进行倾覆验算: (1)式中:γg1、cg1、g1 k分别为起有利作用的永久荷载的分项系数、效应系数、荷载标准值;γg2、cg2、g2 k分别为起不利作用的永久荷载的荷载分项系数、效应系数、荷载标准值;cq1、q1 k 分别为第一个可变荷载的荷载效应系数、荷载标准值;cqi、qik分别为第i个可变荷载的荷载效应系数、荷载标准值;ψci为第i个可变荷载的组合值系数。当风荷载与一个以上的其它可变荷载组合时采用0.9;当风荷载仅与永久荷载组合时采用1.0。 对于平、立面无突出凹凸不平的脚手架,以下简称为规整脚手架,其倾覆验算应按如下表达式进行: (2)式中:0.9为起有利作用的永久荷载的荷载分顶系数;cw、wk为风荷载的效应系数、风荷载的标准值。 对于规整脚手架,其上作用的永久荷载、可变荷载是抗倾覆的,
目录 摘要 .....................................................................IV Abstract....................................................................V 前言 .................................................................... VI 第一章绪论 ........................................... 错误!未定义书签。 1.1 液压挖掘机在现代化建设中的作用.................. 错误!未定义书签。 1.2 液压挖掘机的工作特点和基本类型 (1) 1.2.1 液压挖掘机的主要优缺点 (1) 1.2.2 液压挖掘机的基本类型及主要特点 ............ 错误!未定义书签。 1.3 国内外液压挖掘机研究现状及发展趋势 (4) 1.3.1 研究现状 (4) 1.3.2 发展趋势 .................................. 错误!未定义书签。 1.4 课题设计的目的和意义 (5) 1.5 本设计所要完成的主要任务 (5) 第二章总体方案设计 .................................... 错误!未定义书签。 2.1 履带式液压挖掘机的组成.......................... 错误!未定义书签。 2.2 设计依据 (7) 2.2.1 履带式行走装置的主要特点 (7) 2.2.2 设计参数 .................................. 错误!未定义书签。 2.3 总体设计原则.................................... 错误!未定义书签。 2.4 动力装置的比较与选型 (8) 2.5 工作装置的比较与选择 (9) 2.5.1 反铲工作装置 .............................. 错误!未定义书签。 2.5.2 正铲工作装置 .............................. 错误!未定义书签。 2.6 回转机构的选择.................................. 错误!未定义书签。 2.7 传动方式的比较与选择............................ 错误!未定义书签。 2.7.1 机械传动 .................................. 错误!未定义书签。 2.7.2 液力机械传动 .............................. 错误!未定义书签。 2.7.3 电力传动 .................................. 错误!未定义书签。
轮式液压挖掘机操作规程 (一)启动前检查 第一条清理设备上的泥土杂物;检查设备外观是否完好,有无变形、裂纹等异常损坏。 第二条检查转向连杆机构有无异常。 第三条检查轮胎有无损伤,气压是否正常,螺栓有无松动和丢失,轮辋、轮胎压圈及压圈锁是否正常。 第四条检查车架有无变形、裂纹现象,各驱动桥有无开焊或裂纹。 第五条检查制动系统和管路有无异常。 第六条检查各部铰接点润滑是否良好。 第七条检查回转齿圈啮合情况和润滑情况是否良好。 第八条检查各工作油缸、动臂、斗杆、铲斗、斗齿、销轴、螺栓等有无变形、裂纹等异常和磨损过限。 第九条检查设备各部有无渗漏现象,各部联结螺栓有无松动、断裂、丢失;附件是否齐全。 第十条检查燃油位、发动机油位、液压油位、变速箱油和差速器油位、蓄电池电解液液位等。 第十一条检查空气滤清器,必要时清理空气滤清器外滤芯。 第十二条检查清理发动机周围和散热器上的杂物和尘土,检查发动机有无渗漏、联结螺栓有无松动丢失;检查进气管、排气管接口处密封状况,是否有泄漏。 第十三条检查发动机风扇皮带、发电机皮带张紧度以及皮带有无损坏。 第十四条检查油管、电气线路有无异常磨损、老化、破裂等现象。 第十五条检查并使主泵吸油管路上的球阀在接通位置。 第十六条检查照明、喇叭、雨刷器、倒车镜、灭火器、通讯设备是否齐全有效。 第十七条检查仪表、指示器和指示灯是否齐全完好。
(二)启动 第十八条检查一切正常并确认周围无障碍物及人员后,将各操纵杆放到空位,停车制动在锁止位置。 第十九条将驾驶室左控制箱向上翻起(或操纵手动控制阀)切断先导控制回路。 第二十条将油门放在中间3/4位置上(即小油门)。 第二十一条将钥匙旋转到接通(“ON”)位置,鸣笛发出启动信号。将钥匙旋转到启动(“START”)位置,启动发动机。如果发动机启动困难,钥匙在启动位置的时间一次不准超过20秒,两次启动间隔时间不准少于2分钟,如果连续 3次不能启动,应检查发动机。 第二十二条当发动机启动后,立即松开钥匙。 第二十三条发动机启动后,观察各仪表指示是否正常,机油压力如果在6秒后仍不正常,应立即熄火检查。 第二十四条发动机启动后应怠速运转3~5分钟,检查发动机等有无异响、异味、异常振动和渗漏,观察发动机排气颜色是否正常。 第二十五条逐渐增大发动机油门,使转速至中速,以使发动机升温。 第二十六条在冬季停放时间较长的车应先进行预热,方可启动。 第二十七条如果使用启动液辅助启动,必须遵守有关启动液使用规定。(三)运行 第二十八条冷车启动后不准立即行驶和作业,发动机水温低于60摄氏度前不准满负荷工作。 第二十九条起步前检查空气压力表,表针指示在绿色区域内方准起步。 第三十条行走前应将平台锁紧销插入销孔,作业前应拨出。 第三十一条起步前检查车辆前后左右是否有人和障碍物,鸣笛示意。 第三十二条起步前必须先将铲斗提起离开地面0.5米左右,解除停车制动。 第三十三条起步后,检查制动系统和转向系统的可靠性。 第三十四条不准发动机熄火或空档滑行。 第三十五条不准用高速起步,起步时不准高于二档,起步后按道路情况升
精品 实验题目控制系统的稳定性分析 一、实验目的 1.观察系统的不稳定现象。 2.研究系统开环增益和时间常数对稳定性的影响。 二、实验仪器 1.EL-AT-II型自动控制系统实验箱一台 2.计算机一台 三、系统模拟电路图 系统模拟电路图如图3-1 图3-1 系统模拟电路图R3=0~500K; C=1μf或C=0.1μf两种情况。 四、实验报告 1.根据所示模拟电路图,求出系统的传递函数表达式。 G(S)= K=R3/100K,T=CuF/10 2.绘制EWB图和Simulink仿真图。
精品 3.根据表中数据绘制响应曲线。 4.计算系统的临界放大系数,确定此时R3的值,并记录响应曲线。 系统响应曲线 实验曲线Matlab (或EWB)仿真 R3=100K = C=1UF 临界 稳定 (理论值 R3= 200K) C=1UF
精品 临界 稳定 (实测值 R3= 220K) C=1UF R3 =100K C= 0.1UF
精品 临界 稳定 (理论 值R3= 1100 K) C=0.1UF 临界稳定 (实测值 R3= 1110K ) C= 0.1UF
精品 实验和仿真结果 1.根据表格中所给数据分别进行实验箱、EWB或Simulink实验,并进行实验曲线对比,分析实验箱的实验曲线与仿真曲线差异的原因。 对比: 实验曲线中R3取实验值时更接近等幅振荡,而MATLAB仿真时R3取理论值更接近等幅振荡。 原因: MATLAB仿真没有误差,而实验时存在误差。 2.通过实验箱测定系统临界稳定增益,并与理论值及其仿真结果进行比较(1)当C=1uf,R3=200K(理论值)时,临界稳态增益K=2, 当C=1uf,R3=220K(实验值)时,临界稳态增益K=2.2,与理论值相近(2)当C=0.1uf,R3=1100K(理论值)时,临界稳态增益K=11 当C=0.1uf,R3=1110K(实验值)时,临界稳态增益K=11.1,与理论值相近 四、实验总结与思考 1.实验中出现的问题及解决办法 问题:系统传递函数曲线出现截止失真。 解决方法:调节R3。 2.本次实验的不足与改进 遇到问题时,没有冷静分析。考虑问题不够全面,只想到是实验箱线路的问题,而只是分模块连接电路。 改进:在实验老师的指导下,我们发现是R3的取值出现了问题,并及时解决,后续问题能够做到举一反三。 3.本次实验的体会 遇到问题时应该冷静下来,全面地分析问题。遇到无法独立解决的问题,要及时请教老师,
目录 1 绪论 (1) 1.1 选题意义 (1) 1.2 国内外研究现状 (2) 1.3 研究内容及方法 (3) 2 行走装置设计总体基本方案 (4) 2.1行走装置设计原则 (4) 2.2轮式液压挖掘机行走装置的结构形式 (4) 2.3液压系统的设计 (6) 2.4轮式行走装置的传动设计(液压机械传动) (10) 2.5轮式行走装置的构造 (11) 2.5.1悬挂装置选择 (11) 2.5.2 转向机构 (12) 2.5.3 转向方式 (13) 3 整机传动系的设计 (15) 3.1选择液压马达类型、行走速度及传动比 (15) 3.2实际速度及牵引力 (16) 3.3挖掘机行走装置参数 (16) 3.4 变速箱设计 (17) 3.4.1低速档齿轮设计 (17) 1 材料选择 ..................................... 错误!未定义书签。 2 齿数确定 ..................................... 错误!未定义书签。 3 按齿面接触强度设计 ........................... 错误!未定义书签。 4 按齿根弯曲强度设计 ........................... 错误!未定义书签。 5 齿轮几何尺寸计算 ............................. 错误!未定义书签。 3.4.2高速档齿轮设计 (18) 3.4.3齿轮变位 (19) 3.5 轮边减速器 (21) 3.5.1传动方案的选择 (21) 3.5.2配齿选择 (21) 3.5.3行星传动系设计 (22)
YF-ED-J9252 可按资料类型定义编号 液压挖掘机安全操作规程 实用版 In Order To Ensure The Effective And Safe Operation Of The Department Work Or Production, Relevant Personnel Shall Follow The Procedures In Handling Business Or Operating Equipment. (示范文稿) 二零XX年XX月XX日
液压挖掘机安全操作规程实用版 提示:该操作规程文档适合使用于工作中为保证本部门的工作或生产能够有效、安全、稳定地运转而制定的,相关人员在办理业务或操作设备时必须遵循的程序或步骤。下载后可以对文件进行定制修改,请根据实际需要调整使用。 1 岗位安全职责 1.1 负责维护保养工作,对液压挖掘机进行检查、维修、润滑,并做好维护保养记录。 1.2 严格按照安全技术交底和操作规程实施作业。 2 岗位任职条件 2.1 操作人员必须熟悉液压挖掘机的构造和性能,经专门培训,并经考试合格,方可单独进行操作。 2.2 操作人员必须取得相关部门颁发的操作证,并持证上岗。
3 上岗作业前准备 3.1 运转人员工作时必须穿好工作服,做好防护。 3.2 夜间工作时,需有充分的照明设备。 3.3 工作前应对发动机、传动部分、作业部分、制动部分、各种仪表等进行检查,确认情况正常后方得开始工作。 4 安全操作规程 4.1 基本规定 (1)加油时禁止吸烟或接近明火;着火时,应用泡沫灭火器或用砂扑火,不得用水冲洗。 (2)新机械或大修后的挖掘机,应按试运转规定的程序和要求进行试车,并按磨合期规定进行作业。 (3)严禁酒后操作;非本机人员不准随意登
液压挖掘机作业安全操作规程 作业前的技术准备 1)使用前请检查三液:冷却液、机油、液压油的水平面、油质(黏度与外观);检查二排水:燃料箱下部有排水塞,每日清晨都要进行排故,油水分离器含水检查或放水;一通:散热器是否通畅。 2).启动与工作预备:小油门启动,小油熄火,切勿高速动 转后突然熄火;发动机最佳工作水温为:90-95 C,液压油最佳工 作温度55-85 C。请勿低温或超高温运转机器。 3)检查液压系统有无渗漏;检查传动装置、制动系统、回转机构及仪器、仪表、并经试运转,确认正常后方允许进入作业状态。 4)详细了解施工任务和现场情况。检查挖掘机停机处土壤的坚实性和稳定性。检查路堑和沟槽边坡的稳定情况,防止挖掘机倾覆。 5)严禁区任何人员在挖掘机作业区内滞留。禁止无关人员进入驾驶室。 6)挖掘机作业现场应有自卸车进出的道路。作业与行驶中的技术要求 1)挖掘机作业时禁止任何人上、下挖掘机和传递物品,不准 边作业边保养、维修;不要随意调整发动机(调速器)以及液压系统、电控系统;要注意选择和创造合理的作业面,严禁掏洞挖 2)挖掘机卸料时应待自卸车停稳后进行;卸料时在不碰撞自卸车任何部位的情况下,应昼降低铲斗高度;禁铲斗从自卸车驾驶室上方越过。铲斗应在汽车车箱上方的中间位置卸料,不得偏装。卸料高度以斗底板打
开后不碰及车箱为宜。 3)作业时必须做到“八不准” :不准“三条腿”作业;不准单边斗牙硬啃;不准强力挖掘大块石和硬啃固石或根底;不准用斗牙挑大块石装车;铲斗未撤出掌子面,不准回转或行走;运输车辆未停稳,不准装车;铲斗不准从汽车驾驶室上方越过;不准用铲斗推动汽车。禁止利用铲斗击碎坚固物体; 4)禁止将挖掘机布置在上、下两个挖掘段内同时作业;挖掘机在工作面内移动时应先平整地面,并清除通道内的障碍物。如发现有塌方危险,应立即处理或将挖掘机撤离至安全地点。 5)禁止用铲斗油缸全伸出方法顶起挖掘机。铲斗没有离开地面时挖掘机不能作横行行驶或回转运动。 6)禁止用挖掘机动臂横向拖拉他物;液压挖掘机不能用冲击方法进行挖掘。 7)挖掘机在作回转运动时,不能对回转手柄作相反方向的操作。 8)驾驶员应时刻注意挖掘机的运转情况,发现异常应立即停车检查,并及时排除故障。 9)在挖掘机作业、运行过程中,应经常检查液压油温度是否正常。 10)挖掘机运行中遇电线、交叉道、桥涵时,了解情况后再 通过,必要时设专人指挥;挖掘机与高压电线的距离不得少于5m;应尽可能避免倒退行走。 11)挖掘机运行时其动臂应与行走机构平行,转台应锁止,铲斗离地面1m左右。下坡运行时应使用低速档,禁止脱档滑行。 1 2)挖掘机行走路线应与边坡、沟渠、基坑保持足够距离,以保证
3.8 控制系统的稳定性 3.8 控制系统的稳定性 稳定性是控制系统最重要的特性之一。它表示了控制系统承受各种扰动,保持其预定工作状态的能力。不稳定的系统是无用的系统,只有稳定的系统才有可能获得实际应用。我们前几节讨论的控制系统动态特性,稳态特性分析计算方法,都是以系统稳定为前提的。 3.8.1 稳定性的定义 图3.26(a)是一个单摆的例子。在静止状态下,小球处于A位置。若用外力使小球偏离A而到达A’,就产生了位置偏差。考察外力去除后小球的运动,我们会发现,小球从初始偏差位置A',经过若干次摆动后,最终回到A点,恢复到静止状态。图3.26(b)是处于山顶的一个足球。足球在静止状态下处于B位置。如果我们用外力使足球偏离B位置,根据常识我们都知道,足球不可能再自动回到B位置。对于单摆,我们说A位置是小球的稳定位置,而对于足球来说,B则是不稳定的位置。 图 3.26 稳定位置和不稳定位置 (a)稳定位置;(b)不稳定位置 处于某平衡工作点的控制系统在扰动作用下会偏离其平衡状态,产生初始偏差。稳定性是指扰动消失后,控制系统由初始偏差回复到原平衡状态的性能。若能恢复到原平衡状态,我们说系统是稳定的。若偏离平衡状态的偏差越来越大,系统就是不稳定的。 在控制理论中,普遍采用了李雅普诺夫(Liapunov)提出的稳定性定义,内容如下: 设描述系统的状态方程为 (3.131)
式中x(t)为n维状态向量,f(x(t),t)是n维向量,它是各状态变量和时间t的函数。如果系统的某一状态,对所有时间t,都满足 (3.132) 则称为系统的平衡状态。是n维向量。当扰动使系统的平衡状态受到破坏时,系统就会偏离平衡状态,在时,产生初始状态=x。在时,如果对于任一实数,都存在另一实数,使得下列不等式成立 (3.133) (3.134) 则称系统的平衡状态为稳定的。 式中称为欧几里德范数,定义为: (3.135) 矢量的范数是n维空间长度概念的一般表示方法。 这个定义说明,在系统状态偏离平衡状态,产生初始状态以后,即以后,系统的状态将会随时间变化。对于给定的无论多么小的的球域S(),总存在另一个的球域,只要初始状态不超出球域,则系统的状态 的运动轨迹在后始终在球域S()内,系统称为稳定系统。 当t无限增长,如果满足: (3.136) 即系统状态最终回到了原来的平衡状态,我们称这样的系统是渐近稳定的。对于任意给定的正数,如果不存在另一个正数,即在球域内的初始状态,在后,的轨迹最终超越了球域S(),我们称这种系统是不稳定的。 图3.27是二阶系统关于李雅普诺夫稳定性定义的几何说明。
模板及支撑系统设计取值 中板纵距为600mm,横距900mm,水平杆步距为900mm;主楞采用φ48钢管双拼间距900mm,次棱采用100*100方木间距300mm。中板梁模板施工面板采用18mm 厚竹胶合板,次楞采用间距300mm的100*100mm方木,主楞采用间距450mm双拼φ48×3.5mm钢管。 顶板纵距为600mm,横距600mm,水平杆步距为900mm。主楞采用φ48钢管双拼间距900mm,次棱采用100*100方木间距300mm。立杆底座支撑在结构板上。顶总梁模板施工面板采用18mm厚竹胶合板,次楞采用间距250mm的100×100mm 方木,主楞采用间距300mm双拼φ48×3.5mm钢管。 11.3模板及支撑系统设计验算说明 11.3.1设计验算原则 (1)应满足模板在运输、安装、使用过程中的强度、刚度及稳定性的要求;(2)从本工程实际出发,优先选用定型化、标准化的模板支撑和模板构件;(3)采取符合实际的力学模型进行计算。 11.3.2模板及支架系统的力学参数
11.3.3模板变形值的规定 为了保证结构表面的平整度,模板及模板支架必须具有足够的刚度,验算时其变形值不超过下列规定: (1)结构表面外露的模板,为模板构件计算跨度的1/400; (2)结构表面隐蔽的模板,为模板构件计算跨度的1/250; (3)支架体系的压缩变形值或弹性挠度,为相应的结构计算跨度的1/1000;11.4侧墙模板及支架计算 11.4.1荷载计算 1、恒载——作用在模板上的侧压力 1/2νtββF=0.22γ(1)21C0=γHF (2)C取式中较小值 1)新浇注混凝土侧压力 F1=0.22rct0β1β2V1/2 =0.22×24×5×1.2×1.15×1 1/2 =36.43KN/m2 其中:rc为混凝土的重力密度,取24KN/m2; t0=200/(T+15)=200/(25+15)=5(注混凝土入模温度25℃); β1,外加剂影响修正系数,不掺外加剂时取1.0,掺具有缓凝作用的外加剂时取1.2,本工程采用商品混凝土,故取1.2; β2,混凝土坍落度影响修正系数,当坍落度小于30mm时,取0.85;50~90mm 时,取1.0;110~150mm时,取1.15,本工程坍落度为140±20mm,取值为1.15;V=1m/h,本工程混凝土采用汽车泵泵送浇筑,板块最大长度为28m宽度为0.8m,则浇筑速度为1m/h,混凝土每小时浇筑=1/28/0.8=22.4m3/h,。 2)新浇注混凝土侧压力 F2=rch=24×5.8=139.2KN/m2 3)新浇注混凝土作用于模板的最大侧压力标准值为 G4k=Fmin=F1=36.43KN/m2 其有效压头高度h=F1/rc=36.43/24=1.52m,计算简图如下:
液压挖掘机行走部件的保养 液压挖掘机主要用于挖掘作业,很少进行远距离行走。因此容易忽视对其下部行走体的保养。但是,下部行走体一旦发生故障则会花费相当多的停机时间和不小的修理费用。为了降低因停机而造成的作业损失及修理费用,应重视对下部行走体的保养和检查。 清扫机器时,应同时清扫下部行走体上的污泥 作业结束后,作业人员在清扫驾驶室的同时是否也对下部行走体上的污泥进行清扫?若下部行走体上附着有污泥。则无法进行其相关部件的检查。因此,请务必清除这些污泥,并对下部行走体进行检查和保养。?螺栓是否松动? ?托链轮和支重轮是否无法转动? ?托链轮、支重轮和驱动轮是否漏油? 如忽视上述异常状态,最终会引发严重事故。若因螺栓折损而使相关部件破损及托链轮或支重轮磨偏,将大大增加维修费用。 应根据土质适当地进行履带张紧度的调整 不同的施工工地的土质会有所差异。应结合土质对履带张紧度进行调整,以延长机器的使用寿命。 ?土质柔软时 履带及轨链节上容易附着泥土,所以,履带要调得略松一些,以防止 因泥土的附着而产生施加于轨链节上的异常应力。
?在遍布卵石的施工工地时 履带也要调得略松一些,这样,在行走于卵石上时,可避免履带板的弯曲。 ?坚固而平坦的地面时 最好把履带调得略紧一些 履带张紧度的调整 若履带张得过紧,会出现行走速度及行走动力下降的现象。这样不仅会导致作业效率的下降,而且由于销和衬套上被施加了过大摩擦力而引起异常磨损。 相反,若履带调得过松,履带松弛地搭在驱动轮和托链轮上,造成的磨损或损伤更大。而且,当松动的履带下垂过大时,可能出现与机架接触并损伤机架的现象。这样,即使是加强了的下部行走体,若不进行正确的调整,也会导致意外故障的发生。 有关履带张紧度调整方法和标准调整量的详情,请参见随机的《操作人员手册》。 降低磨损的保养方法 托链轮、支重轮、驱动轮及轨链节等,在长时间的运转过程中,会出现一定程度的磨损。但是,根据实施日常检查与否,会出现很大程度上的差异。所以,只要稍微花费一点时间进行适当的保养,就能够很 好地控制其磨损度?若在部分托链轮和支重轮无法运转的状态下继续使
一、设计任务 1. 结构设计任务 完成各板式塔的总体结构设计,绘图工作量折合A1图共计4张左右,具体包括以下内容: ⑴各塔总图1张A0或A0加长; ⑵各塔塔盘装配及零部件图2张A1。 2. 设计计算内容 完成各板式塔设计计算说明书,主要包括各塔主要受压元件的壁厚计算及相应的强度校核、稳定性校核等内容。 二、设计条件 1. 塔体内径mm 2000=i D ,塔高m 299.59H i =; 2.设计压力p c =2.36MPa ,设计温度为=t 90C ?; 3. 设置地区:山东省东营市,基本风压值q 0=480Pa ,地震设防烈度8度,场地土类别III 类,地面粗糙度是B 类; 4. 塔内装有N=94层浮阀塔盘;开有人孔12个,在人孔处安装半圆形平台12个,平台宽度B=900mm ,高度为1200mm ; 5. 塔外保温层厚度为δs =100mm ,保温层密度ρ2=3503m /kg ; 三、设备强度及稳定性校核计算 1. 选材说明 已知东营的基本风压值q 0=480Pa ,地震设防烈度8度,场地土类别III 类;塔壳与裙座对接;塔内装有N=94层浮阀塔盘;塔外保温层厚度为δs =100mm ,保温层密度ρ 2=350 3m /kg ;塔体开有人孔12个,在人孔处安装半圆形平台12个,平台宽度B=900mm , 高度为1200mm ;设计压力 p c =2.36MPa ,设计温度为=t 90C ?;壳 3mm ,裙座厚度附加量2mm ;焊接接头系数取为0.85;塔内径mm 2000=i D 。 通过上述工艺条件和经验,塔壳和封头材料选用Q345R 。对该塔进行强度和稳定计算。 2. 主要受压元件壁厚计算
文件编号:RHD-QB-K2915 (操作规程范本系列) 编辑:XXXXXX 查核:XXXXXX 时间:XXXXXX 挖掘机施工安全操作规 程标准版本
挖掘机施工安全操作规程标准版本操作指导:该操作规程文件为日常单位或公司为保证的工作、生产能够安全稳定地有效运转而制定的,并由相关人员在办理业务或操作时必须遵循的程序或步骤。,其中条款可根据自己现实基础上调整,请仔细浏览后进行编辑与保存。 一、挖掘机司机,应遵守一般安全技术规程的规定。 二、挖掘机在工作前,应做好下列准备工作: 1、向施工人员了解施工条件和任务。内容包括:深度、边坡及电线高度、地下电缆、各种管道、坑道、墓穴和各种障碍物的情况和位置。挖掘机进入现场后,司机应遵守施工现场的有关安全规则。 2、按照日常例行保养项目,对挖掘机进行检查、保养、调整、紧固。 3、检查燃料、润滑油、冷却水是否充足,不足时应予添加。在添加燃油时严禁吸烟及接近明火,以
免引起火灾。 4、检查电线路绝缘和各开关触点是否良好。 5、检查液压系统各管路及操作阀、工作油缸、油泵等,是否有泄漏,动作是否异常。 6、检查钢丝绳及固定钢丝绳的卡子是否牢固可靠。 7、将主离合器操纵杆放在“空档”位置上,起动发动机。检查各仪表、传动机构、工作装置、制动机构是否正常,确认无误后,方可开始工作。 8、发动机起动后,严禁有人站在铲斗内、臂杆上、履带和机棚上。 三、挖掘机在工作中,应注意下列安全事项: 1、挖掘机工作时,应停放在坚实、平坦的地面上。 2、挖掘机工作时应当处于水平位置,并将走行
机构刹住。若地面泥泞、松软和有沉陷危险时,应用枕木或木板、垫妥。 3、铲斗挖掘时每次吃土不宜过深,提斗不要过猛,以免损坏机械或造成倾覆事故。铲斗下落时,注意不要冲击履带及车架。 4、配合挖掘机作业,进行清底、平地、修整的人员,须在挖掘机回转半径以内工作。若必须在挖掘机回转半径内工作时,挖掘机必须停回转,并将回转机构刹住后,方可进行工作。同时,机上机下人员要彼此照顾,密切配合,确保安全。 5、挖掘机装载活动范围内,不得停留车辆和行人。若往汽车上卸料时,应等汽车停稳,驾驶员离开驾驶室后,方可回转铲斗,向车上卸料。挖掘机回转时,应尽量避免铲斗从驾驶室顶部越过。卸料时,铲斗应尽量放低,但又注意不得碰撞汽车的任何部位。
液压挖掘机行走装置https://www.doczj.com/doc/3213301746.html, 因为行走装置兼有液压挖掘机的支撑和运行两大功能,因此液压挖掘机行走装置应尽量满足以下要求: 1)应有较大的驱动力,使挖掘机在湿软或高低不平等不良地面上行走时具有良好的通过性能、爬坡性能和转向性能。 2)在不增大行走装置高度的前提下使挖掘机具有较大的离地间隙,以提高其不平地面上的越野性能。 3)行走装置具有较大的支撑面积或较小的接地比压,以提高挖掘机的稳定性。 4)挖掘机在斜坡下行时不发生下滑和超速溜坡现象,以提高挖掘机的安全性。 5)行走装置的外形尺寸应符合道路运输的要求。 液压挖掘机的行走装置,按结构可分为履带式和轮胎式两大类。 履带工行走装置的特点是,驱动力大(通常每条履带的驱动力可达机重的35%-45%),接比压小(40-150kPa),因而越野性能及稳定性好,爬坡能力大(一般为50%-80%,最大的可达100%),且转弯半径小,灵活性好。履带式行走装置在液压挖掘上使用较为普遍。 但履带式行走装置制造成本高,运行速度低,运行和转向时功率消耗大,零件磨损快,因此,挖掘机长距离运行时需借助于其他运输车辆。 轮胎式行走装置与履带式的相比,优点是运行速度快、机动性好,运行时轮胎不损坏路面,因而在城市建设中很受欢迎,缺点是接地比压大,爬坡能力小,挖掘作业时需要用专门支腿支撑,以确保挖掘机的稳定性和安全性。 履带式行走装置组成与工作原理 履带式行走装置由“四轮一带”(即驱动轮、导向轮、支重轮、托轮、以及履带),张紧装置和缓冲弹簧,行走机构,行走架等组成。 挖掘机运行时,驱动轮在履带的紧边——驱动段及接地段(支撑段)产生一个拉力,企图把履带从支重轮下拉出,由于支重轮下的履带与地面间有足够的附着力,阻止履带的拉出,迫使驱动轮卷动履带,导向轮再把履带铺设到地面上,从而使挖掘机借支重轮沿着履带轨道向前运行。 液压传动的履带行走装置,挖掘机转向时由安装在两条履带上、分别由两台液压泵供油的行走马达(用一台油泵供油时需采用专用的控制阀来操纵)通过对油路的控制,很方便地实现转向或就地转弯,以适应挖掘机在各种地面、场地上运动。