第23卷第10期2006年10月
机 电 工 程
M echanica l &E lectrica l Eng i neering M agazine
V o.l 23N o .10O c.t 2006
收稿日期:2006-06-06
基金项目:教育部重点资助项目(03060);安徽省教育厅青年科研基金资助项目(2005j q l 065)
作者简介:张 春(1972-),男,安徽望江人,主要研究方向为模糊控制及控制系统CAD 。
三相电压型整流器S VP WM 控制简化算法研究
张 春1
,韩瑞华2
,江 明1
,陈其工
1
(1.安徽工程科技学院电气工程系,安徽芜湖241000;2.九天公司,河北廊坊065000)
摘 要:提出了应用于三相电压型脉宽调制整流器的空间矢量简化算法。该算法采用输入电压空
间矢量定向,合成所需参考电压,结合直接电流控制的方法进行电流跟踪控制,提高了整流器的整体性能,实现了单位功率因数整流。关键词:整流器;脉宽调制;空间矢量调制中图分类号:T M 461 文献标识码:A
文章编号:1001-4551(2006)10-0039-03
R esearch on sm i plifier algor it hm of t he three -phase volt age rectifier w it h S VP WM
ZHANG C hun 1
,HAN Rui -hua 2
,JI A NG M i n g 1
,CHEN Q i -gong
1
(1.D ep art m ent of E l ectrica lEngineeri ng ,Anhui Universit y of Technol ogy and Science ,Wuhu 241000,Chi na ;
2.J iutian Co mpany ,Lang f ang 065000,Chi na )
Ab strac t :A si m plified a l go rith m t hree -phase vo ltage source PWM rec tifi e r fo r space ve ctor modu lation w as presented .It pred i gests the arith m etic process w it h t he i nput vo ltage space vector orientati on ,and co m plex the dem anded re ference vo lt -age co m bined t he direc t cu rrent con tro lm e t hod t o trace cu rrent si gna l ,which can i mprove integral perfor m ance o f rec tifier and rea lize un ity i nput pow er fac t o r .K ey word s :P WM rectifi e r ;pulse w idth m odula ti on ;space vec t o r modu lati on
0 前 言
当前,消除谐波污染并提高功率因数,已经成为电力电子技术中的一个重大课题[1,2]
。本研究对三
相P WM 整流器在控制策略方面进行了进一步研
究
[3,4]
,通过计算合成参考电压矢量的电压空间矢量在各个扇区内作用时间,给出了各相桥臂在不同扇区的导通时间分配表,简化了算法,同时结合三相整流系统的建模给出了仿真结果。
1 系统控制结构框图
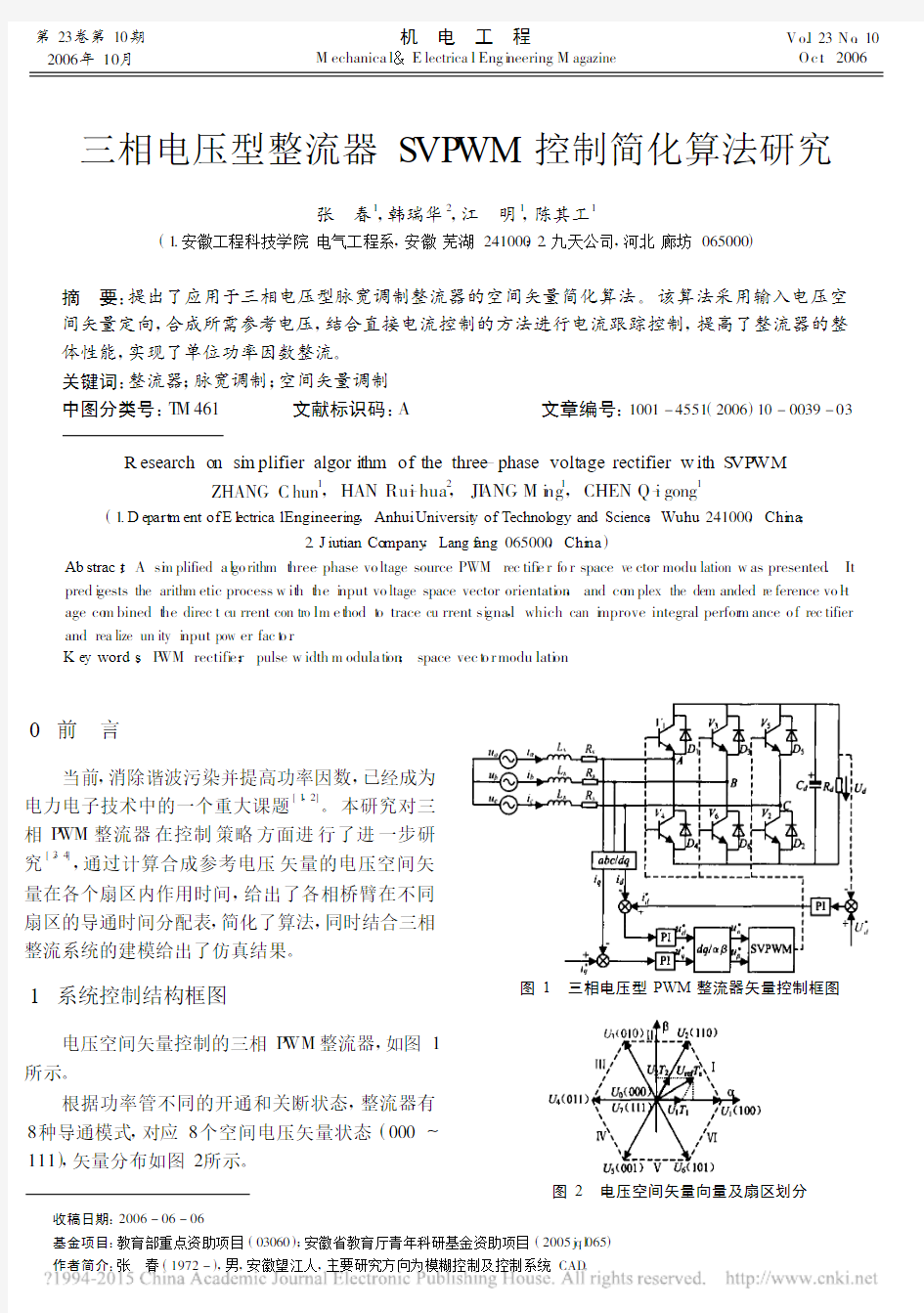
电压空间矢量控制的三相P WM 整流器,如图1所示。
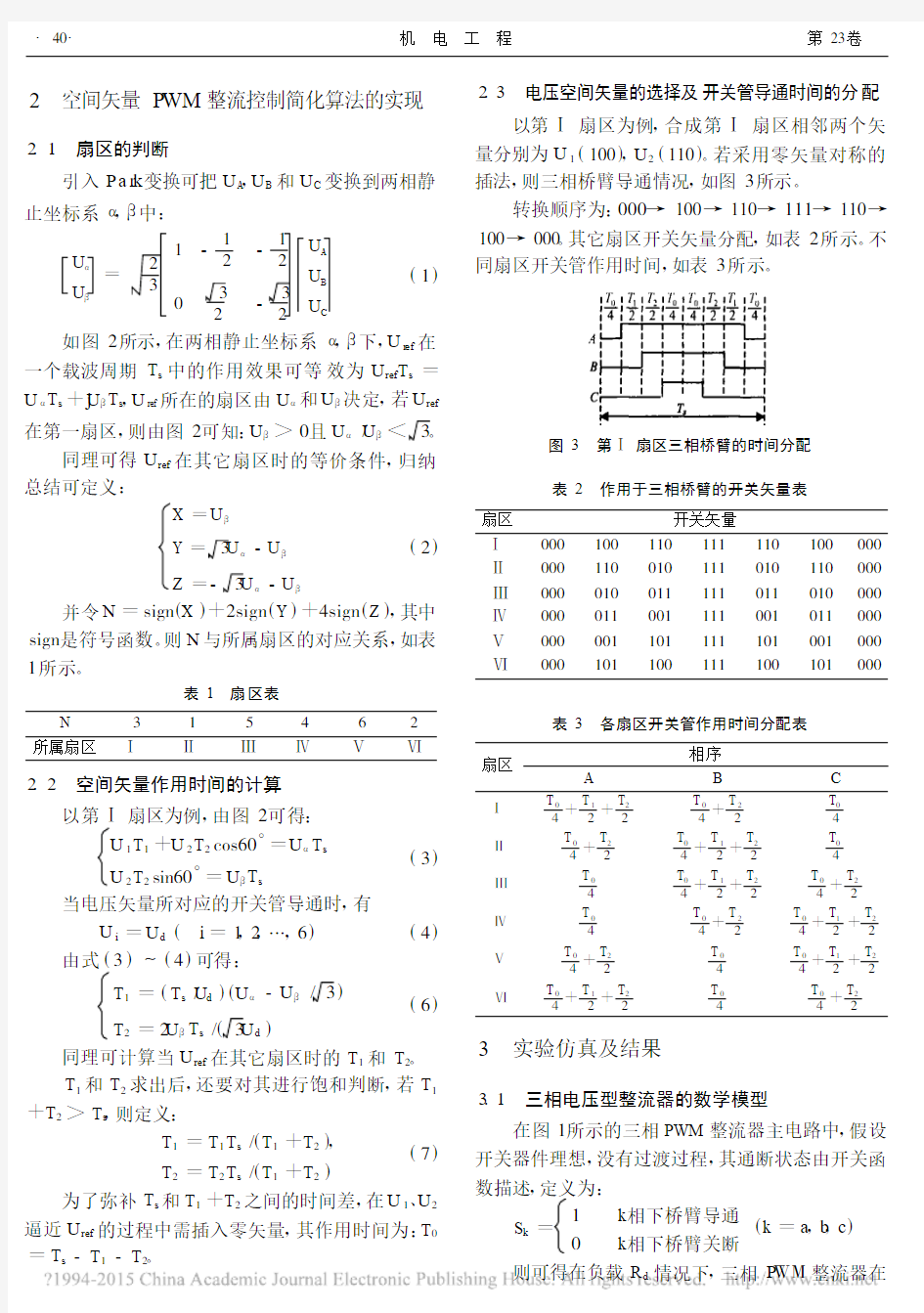
根据功率管不同的开通和关断状态,整流器有8种导通模式,对应8个空间电压矢量状态(000~111),矢量分布如图2所示。
图1 三相电压型PWM 整流器矢量控制框图
图2 电压空间矢量向量及扇区划分
2 空间矢量P WM整流控制简化算法的实现
2.1 扇区的判断
引入Pa r k变换可把U A,U B和U C变换到两相静止坐标系α,β中:
U
αU =2
3
1-
1
2
-
1
2
3
2
-
3
2
U
A
U
B
U
C
(1)
如图2所示,在两相静止坐标系α,β下,U r ef在一个载波周期T s中的作用效果可等效为U ref T s= UαT s+j UβT s,U ref所在的扇区由Uα和Uβ决定,若U ref 在第一扇区,则由图2可知:Uβ>0且UαU/β<3。
同理可得U ref在其它扇区时的等价条件,归纳总结可定义:
X=U
β
Y=3U
α-U
β
Z=-3U
α-U
β
(2)
并令N=sign(X)+2sign(Y)+4sign(Z),其中sign是符号函数。则N与所属扇区的对应关系,如表1所示。
表1 扇区表
N315462
所属扇区ⅠⅡⅢⅣⅤⅥ2.2 空间矢量作用时间的计算
以第Ⅰ扇区为例,由图2可得:
U1T1+U2T2cos60°=UαT s
U2T2sin60°=UβT s
(3)
当电压矢量所对应的开关管导通时,有
U i=U d (i=1,2,…,6)(4)由式(3)~(4)可得:
T1=(T s U/d)(Uα-Uβ/3)
T2=2UβT s/(3U d)
(6)同理可计算当U ref在其它扇区时的T1和T2。
T 1和T
2
求出后,还要对其进行饱和判断,若T
1
+T2>T s,则定义:
T1=T1T s/(T1+T2),
T2=T2T s/(T1+T2)
(7)
为了弥补T s和T1+T2之间的时间差,在U1、U2逼近U ref的过程中需插入零矢量,其作用时间为:T0 =T s-T1-T2。2.3 电压空间矢量的选择及开关管导通时间的分配
以第Ⅰ扇区为例,合成第Ⅰ扇区相邻两个矢量分别为U1(100
),U2(110)。若采用零矢量对称的插法,则三相桥臂导通情况,如图3所示。
转换顺序为:000→100→110→111→110→100→000。其它扇区开关矢量分配,如表2所示。不同扇区开关管作用时间,如表3所示。
图3 第Ⅰ扇区三相桥臂的时间分配
表2 作用于三相桥臂的开关矢量表
扇区开关矢量
Ⅰ000100110111110100000Ⅱ000110010111010110000Ⅲ000010011111011010000Ⅳ000011001111001011000Ⅴ000001101111101001000Ⅵ000101100111100101000
表3 各扇区开关管作用时间分配表
扇区
相序
A B C
Ⅰ
T
4
+
T
1
2
+
T
2
2
T
4
+
T
2
2
T
4Ⅱ
T
4
+
T
2
2
T
4
+
T
1
2
+
T
2
2
T
4Ⅲ
T
4
T
4
+
T
1
2
+
T
2
2
T
4
+
T
2
2Ⅳ
T
4
T
4
+
T
2
2
T
4
+
T
1
2
+
T
2
2
ⅤT0
4
+
T2
2
T0
4
T0
4
+
T1
2
+
T2
2Ⅵ
T0
4
+
T1
2
+
T2
2
T0
4
T0
4
+
T2
2
3 实验仿真及结果
3.1 三相电压型整流器的数学模型
在图1所示的三相PWM整流器主电路中,假设开关器件理想,没有过渡过程,其通断状态由开关函数描述,定义为:
S k=
1 k相下桥臂导通
0 k相下桥臂关断
(k=a,b,c)则可得在负载R d情况下,三相P WM整流器在
40机 电 工 程第23卷
ABC 坐标系中的一般数学模型:
L S di a dt +R s i a =u a -S a -1
3(S a +S b +S c )U d
L S di b dt +R s i b =u b -S b -13
(S a +S b +S c )U d
L S di c dt +R s i c =u c -S c -13(S a +S b +S c )U d
C d dU d dt +i a S a +i b S
b +i
c S c -U
d R d
(
8)
根据式(8)建立的数学模型,利用
SI M ULI NK 提供的基本模块可建立三相整流器的仿真模型,如图4所示。
图4 三相电压型整流器的仿真模型
3.2 参数设置及仿真
仿真电路主要参数为:三相对称交流电压源幅值U m =2202V ,频率f =60H z ,进线电感L s =54mH ,电感寄生电阻R s =3Ψ,直流侧电容C d =1000μF ,直流电压给定为500V 。图5、图6和图7分别给出了电路在整流状态下的三相电流波形、直流输出电压波形以及三相输入电压与三相输入电流的仿真波形。由仿真曲线可见,稳态时三相P WM 电压型整流器的交流侧电流为正弦波,且与电源电压同相位,功率因数为1。
4 结束语
本研究对三相电压型P WM 整流器从控制策略方面进行了进一步研究。仿真模型验证了本控制
算法的有效性。
图5 三相电流波形(i a ,i b ,i c )
图6 输出直流电压波形(U d )
图7 交流侧电压、电流波形(u a ,i a )
参考文献:
[1] 浦志勇,黄立培,吴学智.三相P WM 整流器空间矢量
控制简化算法的研究[J ].电工电能新技术,2002,21(2):56-60.
[2] 王 永,沈颂华,关 淼.新颖的基于电压空间矢量三
相双向整流器的研究[J ].电工技术学报,2006,21(1):104-110.
[3] 马 皓,郎芸萍.空间矢量简化算法在三相PWM 电压
型整流器中的应用[J ].浙江大学学报:工学版,2006,40(1):176-180.
[4] PAN C T ,S H IE H J J .N ew s pace -vec t o r con tro l stra t egies
for three -phase st ep -up /down AC /DC converter [J ].IEEE T ransacti ons on Industrial E l ec tronics ,2000,47(1):25-35.
[编辑:罗向阳]
41 第10期张 春,等:三相电压型整流器SV P WM 控制简化算法研究
多边形的扫描转换 图形学中多边形有两种表示方法:多边形的顶点表示与点阵表示。顶点表示用多边形的顶点序列来刻画多边形;点阵表示则是用位于多边形内的像素的 集合来刻画多边形。 扫描转换多边形或多边形的填充:从多边形的顶点信息出发,求出位于其内部的各个像素,并将其颜色值写入帧缓存中相应单元的过程。 x-扫描线算法 基本思想:如下图所示,按扫描线顺序,计算扫描线与多边形的相交区间,再用要求的颜色显示这些区间的所有像素。 图5-8 x-扫描线算法填充多边形 算法步骤: (1)确定多边形所占有的最大扫描线数,得到多边形顶点的最小和最大y值(ymin和ymax)。 (2)从y=ymin到y=ymax,每次用一条扫描线进行填充。填充过程可分为四个步骤: a.求交:计算扫描线与多边形各边的交点; b.排序:把所有交点按照递增顺序进行排序; c.交点配对:交点两两配对,表示扫描线与多边形的一个相交区间; d.区间填色:将相交区间内的像素置成不同于背景色的填充色。 存在问题:当扫描线与多边形顶点相交时,交点的取舍问题。如下图所示,在扫描线y=1,y=5和y=7时,扫描线过多边形的顶点,若不加以处理,交点配对时会发生错误。
图5-9 与多边形相交的交点的处理 解决方法:当扫描线与多边形的顶点相交时,若共享顶点的两条边分别落在扫描线的两边,交点只算一个;若共享顶点的两条边在扫描线的同一边,这时交点作为零个或两个。实际处理时,只要检查顶点的两条边的另外两个端点的Y值,两个Y值中大于交点Y值的个数是0,1,2,来决定取0,1,2个交点。 改进的有效边表算法 由于x-扫描线算法在处理每条扫描线时,需要与多边形所有的边求交,效率很低,因此需要加以改进,形成改进的有效边表算法。 改进原理: (1)处理一条扫描线时,仅对有效边求交。 (2)利用扫描线的连贯性,即当前扫描线与各边的交点顺序与下一条扫描线与各边的交点顺序很可能相同或非常相似。 (3)利用多边形边的连贯性,即当某条边与当前扫描线相交时,它很可能也与下一条扫描线也相交:若边的直线斜率为k,这样边与两条相邻扫描线的交点有如下关系:xi+1=xi+1/k。 图5-10 与多边形边界相交的两条连续扫描线交点的相关性 有效边(Active Edge):指与当前扫描线相交的多边形的边,也称为活性边。 有效边表(Active Edge Table, AET):把有效边按与扫描线交点x坐标递增的顺序存放在一个链表中,此链表称为有效边表。有效边表的每个结点为:
电力电子课程设计课程设计报告 题目:三相电压型PWM整流器与仿真专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月6 日
摘要:叙述了建立三相电压型PWM整流器的数学模型。在此基础上,使用功能强大的MATLAB软件进行了仿真,仿真结果证明了方法的可行性。 关键词:整流器;PWM;simulink
目录 一任务书 (1) 1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (4) 2.3 pwm控制的基本原理 (6) 2.4 PWM整流器的发展现状 (6) 三设计内容 (8) 3.1 仿真模型 (8) 3.2 各个元件参数 (11) 3.3 仿真结果 (13) 3.4 结果分析 (15) 四总结 (15) 五参考文献 (15)
一任务书 1.1 题目 三相电压型PWM整流器仿真 1.2 设计内容及要求 设计三相电压型PWM整流器及其控制电路的主要参数,并使用MATLAB 软件搭建其仿真模型并验证。 设计要求(pwm整流器仿真模型参数): (1)交流电源电压600V,60HZ (2)短路电容30MVA (3)外接负载500kVar,1MW (4)变压器变比600/240V (5)0.05s前,直流负载200kw,直流电压500V,0.05s后,通过断路器并联一个相同大小的电阻。 1.3 报告要求 (1)叙述三相桥式电路的基本原理 (2)叙述整流电路基本原理 (3)叙述pwm控制的基本原理 (4)记录参数(截图) (5)记录仿真结果,分析滤波结果 (6)撰写设计报告 (7)提交程序源文件
简单多边形裁剪算法 摘要:多边形裁剪算法与线性裁剪算法具有更广泛的实用意义,因此它是目前 裁剪研究的主要课题。本文主要介绍了一种基于多边形顶点遍历的简单多边形裁剪算法,它有效降低了任意多边形裁剪复杂度。通过记录交点及其前驱、后继信息,生成结果多边形,该算法简化了交点的数据结构,节省了存储空间,降低了算法的时间复杂度,具有简单、易于编程实现、运行效率高的特点。 关键词:多边形裁剪;交点;前驱;后继;矢量数组 一、技术主题的基本原理 简单多边形裁剪算法综合考虑现有多边形裁剪算法的优缺点,它是一种基于多边形顶点遍历来实现简单多边形裁剪工作的。其主要的原理是遍历多边形并把多边形分解为边界的线段逐段进行裁剪,输出结果多边形。 二、发展研究现状 近年来,随着遥感绘图、CAD辅助设计、图象识别处理技术的发展,图形裁剪算法从最初在二维平面上线和图形的裁剪扩展到三维空间里体和场的裁剪,国内外相继提出不少行之有效的算法,但越来越复杂的图形和计算也对算法的速度和适用性提出了越来越高的要求。因此,不断简化算法的实现过程,完善细节处理,满足大量任意多边形的裁剪也就成了当今算法研究的焦点之一。 以往多边形裁剪算法不是要求剪裁多边形是矩形,就是必须判断多边形顶点的顺时针和逆时针性,即存在不实用或者是增加了多边形裁剪算法的难度。为了解决现在的问题,我们研究现在的新多边形算法,其中,裁剪多边形和被裁剪多边形都可以是一般多边形,且不需要规定多边形输入方向。它采用矢量数组结构,只需遍历剪裁多边形和被裁剪多边形顶点即完成多边形的裁剪,具有算法简单、运行效率高的特点。 三、新算法设计 1、算法的思想 本算法是为了尽量降低任意多边形裁剪算法复杂度而提出的,其主要思想是采用矢量数组结构来遍历裁剪多边形和被裁多边形顶点,记录裁剪多边形和被裁减多边形交点及其前驱、后继信息,并通过记录相邻交点的线段,然后通过射线法选择满足条件的线段,之后进行线段连接,输出对应的裁剪结果。算法数据结构简单,即没有用常用的数据结构,如线性链表结构、双向链表结构和树形结构,这样就节省了存储空间,增加算法的效率。 2、主要数据结构 多边形裁剪算法的核心是数据结构,它决定了算法的复杂度和计算效率。兼顾数据结构简单和节省存储空间的目的,简单多边形裁剪算法是基于矢量数组vector的数据结构进行裁剪的,多边形矢量数组的每个元素表示多边形顶点,且按顶点输入的顺序存储。裁剪多边形和被裁剪多边以下我们分别用S和C表示,
基于变分网格的曲面简化高效算法? 金勇, 吴庆标+, 刘利刚 (浙江大学数学系,浙江杭州 310027) An Efficient Method for Surface Simplification Based On Variational Shape Approximation* JIN Yong, WU Qing-biao+, LIU Li-gang (Department of Mathematics, Zhejiang University, Hangzhou 310027, China) + Corresponding author: E-mail:qbwu@https://www.doczj.com/doc/3c16058199.html, Abstract:Providing fast and accurate simplification method for large polygon mesh is one of the most important research focuses in computer graphics. Approximating mesh model with a few polygons can improve the rendering speed, and reduce the storage of the model. The paper presents a local greedy algorithm to minimize the energy defined by variational shape approximation. The algorithm simplifies the mesh by controlling the number of the target polygons, while attempting to get ideal effect by adaptive seed triangles selection. The algorithm has intuitive geometric meaning. The method is efficient enough to be efficiently adopted in the geometric modeling system. Key words: Polygon mesh simplification; variational shape approximation; greedy algorithm; geometric modeling 摘要: 为大型的多边形网格模型提供快速、准确的简化算法是计算机图形学中的一个重要的研究方面.以较少的多边形逼近表示网格模型,能够提高模型的绘制速度,减小模型的存储空间.本文根据变分网格逼近表示所定义的全局误差能量,提出一种局部贪心优化算法,该算法通过控制目标网格分片数来简化网格,通过种子的自适应选取以达到理想的简化效果,具有直观的几何意义.本文方法计算量少,效率较高,能够有效应用于几何造型系统中. 关键词:多边形网格简化;变分网格逼近;贪心算法;几何造型 中图法分类号: TP391文献标识码: A 1 引言 三维多边形网格模型,包括三角形网格、四边形网格等,在计算机辅助几何设计、计算机动画、虚拟现实、计算机游戏和医学影像等领域有着大量的应用.随着三维扫描技术的发展,顶点数为数万的模型已经非常常见, ?Supported by the National Natural Science Foundation of China under Grant No.10871178, 60776799 (国家自然科学基金); Technology Department of Zhejiang Province Grant No. 2008C01048-3(浙江省重大科技创新项目) 作者简介: 金勇(1985-),男,上海人,博士研究生,主要研究领域为数字几何处理和计算机辅助几何设计;吴庆标(1963-),男, 浙江台州人,博士,教授,博士生导师,主要研究领域为图形与图像处理,数值计算方法,高性能并行计算和计算机模拟; 刘利刚(1975-),男,江西吉安人,博士,副教授,博士生导师,主要研究领域为数字几何处理,计算机辅助几何设计,计算机图形学和图像处理.
电力电子课程设计课程设计报告 题目三相电压型PWM整流器与仿真专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月6 日 摘要:叙述了建立三相电压型PWM 整流器的数学模型。在此基础上,使用功能强 -可编辑修改-
大的MATLAB 软件进行了仿真,仿真结果证明了方法的可行性。关键词:整流器;PWM ;simulink
-可编辑修改-
目录 一任务书 (1) 1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (6) 2.3 pwm 控制的基本原理 (9) 2.4 PWM 整流器的发展现状........................................ 1..0...三设计内容........................................................... 1..1 3.1 仿真模型...................................................... 1..1 3.2 各个元件参数.................................................. 1..5 3.3 仿真结果...................................................... 1..7 3.4 结果分析...................................................... 1..9 四总结............................................................... 2..0 五参考文献........................................................... 2..0
三相电压型PWM整流器设计与仿真 1 绪论 随着功率半导体器件技术的进步,电力电子变流装置技术得到 了快速发展,出现了以脉宽调制(PWM)控制为基础的各种变流装置,如变频器、逆变电源,高频开关电源以及各类特种变流器等, 电力电子装置在国民经济各领域取得了广泛的应用,但是这些装置 的使用会对电网造成严重的谐波污染问题。传统的整流方式会无论 是二极管不控整流还是晶闸管相控整流电路能量均不能双向传递, 不仅降低能源的利用率还会增加一定的污染,主要缺点是:1)无功功率的增加造成了装置功率因素降低,会导致损耗增加,降低电力装置的利用率等; 2)谐波会引起系统内部相关器件的误动作,使得电能的计量出现误差,外部对信号产生严重干扰; 3)传统的结构,能量只能单向流动,使得控制系统的能量利用率不高,不能起到节能减排的作用。 电网污染的日益严重引起了各国的高度重视,许多国家都已经 制定了限制谐波的国家标准,国际电气电子工程师协会(IEEE),国际 电工委员会(IEC)和国际大电网会议(CIGRE)纷纷推出了自己的谐波标准。国际电工学会于1988年对谐波标准IEC555-2进行了修正,欧洲制定IEC1000-3-2标准。我国国家技术监督局也于1994年颁布了 《电能质量公用电网谐》标准(GB/T 14549-93),传统变流装置大多
数已不符合这些新的标准,面临前所未有的挑战。 目前,抑制电力电子装置对电网污染的方法有两种:一是设置补偿装置。通过对已知频率谐波进行补偿,这种方式适用于所有谐波源,但其缺点是只能对规定频率的谐波进行补偿,应用范围受限。并且当受到电网阻抗特性或其他外界干扰,容易发生并联谐振,导致某些谐波被放大进而使滤波器过载或烧毁;而是对整流器装置本身性能进行改造,通过优化控制策略和参数设置,使网侧输入的电压和电流呈现接近于同相位的正弦波,实现单位功率因数运行即功率因数为1。 目前治理谐波和无功主要是采用功率因数校正技术(PFC技术),由于PWM调制技术引入整流器中,使得整流器能够获得较好的直 流电压并且实现网侧电流正弦化,PWM整流技术已经成为治理电网污染的主要技术手段。PFC技术虽然具有控制简单、功率因数高、 总谐波失真小和易于电路设计等优点,但是其结构并没有发生根本变化只是在输出侧加了一个开关管,而重要的交流侧还是选取二极管做为开关器件,其整流方式只能是单一方向的不能实现能量的双向流动,它 在单相电路中有着广泛的用途,但是由于其自身性质决定其难以用于三相电电路中;PWM整流技术交流侧采用全控器件,与传统PFC相比,PWM整流技术可以在任意功率因数运行可以实现能量双向流动而且具有较好的电流品质和更快的动态响应速度,因而真正实现了“绿色电能变换”提高了系统电能的利用率减少了资源的浪
再经典不过的算法了: // 功能:判断点是否在多边形内 // 方法:求解通过该点的水平线与多边形各边的交点 // 结论:单边交点为奇数,成立! //参数: // POINT p 指定的某个点 // LPPOINT ptPolygon 多边形的各个顶点坐标(首末点可以不一致) // int nCount 多边形定点的个数 BOOL PtInPolygon (POINT p, LPPOINT ptPolygon, int nCount) { int nCross = 0; for (int i = 0; i < nCount; i++) { POINT p1 = ptPolygon[i]; POINT p2 = ptPolygon[(i + 1) % nCount]; // 求解y=p.y 与p1p2 的交点 if ( p1.y == p2.y ) // p1p2 与y=p0.y平行 continue; if ( p.y < min(p1.y, p2.y) ) // 交点在p1p2延长线上 continue; if ( p.y >= max(p1.y, p2.y) ) // 交点在p1p2延长线上 continue; // 求交点的X 坐标-------------------------------------------------------------- double x = (double)(p.y - p1.y) * (double)(p2.x - p1.x) / (double)(p2.y - p1.y) + p1.x; if ( x > p.x ) nCross++; // 只统计单边交点 } // 单边交点为偶数,点在多边形之外--- return (nCross % 2 == 1); }
CENTRAL SOUTH UNIVERSITY 电力电子装置课程设计报告 题目三相电压型整流器设计 学生姓名*** 学号********* 指导教师** 学院信息院 专业***** 完成时间2017.1.2
第一章绪论 随着功率半导体器件技术的进步,电力电子变流装置技术得到了快速发展,出现了以脉宽调制(PWM)控制为基础的各种变流装置,如变频器、逆变电源,高频开关电源以及各类特种变流器等,电力电子装置在国民经济各领域取得了广泛的应用,但是这些装置的使用会对电网造成严重的谐波污染问题。传统的整流方式会无论是二极管不控整流还是晶闸管相控整流电路能量均不能双向传递,不仅降低能源的利用率还会增加一定的污染,主要缺点是: 1)无功功率的增加造成了装置功率因素降低,会导致损耗增加,降低电力装置的利用率等; 2)谐波会引起系统内部相关器件的误动作,使得电能的计量出现误差,外部对信号产生严重干扰; 3)传统的结构,能量只能单向流动,使得控制系统的能量利用率不高,不能起到节能减排的作用。 电网污染的日益严重引起了各国的高度重视,许多国家都已经制定了限制谐波的国家标准,国际电气电子工程师协会(IEEE),国际电工委员会(IEC)和国际大电网会议(CIGRE)纷纷推出了自己的谐波标准。国际电工学会于1988年对谐波标准IEC555-2进行了修正,欧洲制定IEC1000-3-2标准。我国国家技术监督局也于1994年颁布了《电能质量公用电网谐》标准(GB/T 14549-93),传统变流装置大多数已不符合这些新的标准,面临前所未有的挑战。 目前,抑制电力电子装置对电网污染的方法有两种:一是设置补偿装置。通过对已知频率谐波进行补偿,这种方式适用于所有谐波源,但其缺点是只能对规定频率的谐波进行补偿,应用范围受限。并且当受到电网阻抗特性或其他外界干扰,容易发生并联谐振,导致某些谐波被放大进而使滤波器过载或烧毁;而是对整流器装置本身性能进行改造,通过优化控制策略和参数设置,使网侧输入的电压和电流呈现接近于同相位的正弦波,实现单位功率因数运行即功率因数为1。 目前治理谐波和无功主要是采用功率因数校正技术(PFC技术),由于PWM 调制技术引入整流器中,使得整流器能够获得较好的直流电压并且实现网侧电流正弦化,PWM整流技术已经成为治理电网污染的主要技术手段。PFC技术虽然具有控制简单、功率因数高、总谐波失真小和易于电路设计等优点,但是其结构并没有发生根本变化只是在输出侧加了一个开关管,而重要的交流侧还是选取二极管做为开关器件,其整流方式只能是单一方向的不能实现能量的双向流动,它在单相电路中有着广泛的用途,但是由于其自身性质决定其难以用于三相电电路中;PWM整流技术交流侧采用全控器件,与传统PFC相比,PWM整流技术可
课程设计报告电力电子课程设计三相电压型PWM整流器与仿真题目: 专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月6 日
摘要:叙述了建立三相电压型PWM整流器的数学模型。在此基础上,使用功能强大的MATLAB软件进行了仿真,仿真结果证明了方法的可行性。 关键词:整流器;PWM;simulink I 目录 一任务书 (1)
1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (4) 2.3 pwm控制的基本原理 (6) 2.4 PWM整流器的发展现状 (6) 三设计内容 (8) 3.1 仿真模型 (8) 3.2 各个元件参数 (11) 3.3 仿真结果 (13) 3.4 结果分析 (15) 四总结........................................................................................................................ 15 五参考文献 (15) II
一任务书 1.1 题目 三相电压型PWM整流器仿真 1.2 设计内容及要求 设计三相电压型PWM整流器及其控制电路的主要参数,并使用MATLAB软件搭建其仿真模型并验证。 设计要求(pwm整流器仿真模型参数): (1)交流电源电压600V,60HZ (2)短路电容30MVA (3)外接负载500kVar,1MW (4)变压器变比600/240V (5)0.05s前,直流负载200kw,直流电压500V,0.05s后,通过断路器并联一个相同大小的电阻。 1.3 报告要求 (1)叙述三相桥式电路的基本原理 (2)叙述整流电路基本原理 (3)叙述pwm控制的基本原理 (4)记录参数(截图) (5)记录仿真结果,分析滤波结果 (6)撰写设计报告 (7)提交程序源文件 1 二基础资料 2.1 三相桥式电路的基本原理 在三相桥式电路中,对共阴极组和共阳极组是同时进行控制的,控制角都是α。由于三相桥式整流电路是两组三相半波电路的串联,因此整流电压为三相半波时的两倍。很显然在输出电压相同的情况下,三相桥式晶闸管要求的最大反向电压,可比三相半波线路中的晶闸管低一半。 为了分析方便,使三相全控桥的六个晶闸管触发的顺序是1-2-3-4-5-6,晶闸管是这样编号的:晶闸管KP1和KP4接a相,晶闸管KP3和KP6接b相,晶管KP5和KP2接c相。
单相电压型PWM整流器波形分析对于单相VSR而言,其交流侧基波电压控制有两种PWM的调制方式,即双极性调制和单极性调制。以下将根据双极性PWM的调制方式,分析单相电压型PWM整流器(如图1所示)。 图1 单相电压型PWM整流器 基于matlab的波形分析及仿真结果 将图1的单相电压型PWM整流器在matlab中建立仿真模型如下图所示:
图2 单相电压型PWM整流电路仿真模型 系统仿真参数如下:交流侧电网电压220V,工频直流侧电 阻R L=10Ω。主电路储能元件参数为L=3 Mh,C=143μF。PI参数Ki=2.3,τi=128。 图3 控制信号的时序分布 (1)交流侧电压v(t) 若单相VSR直流侧电容足够大,则在PWM过程中可近似认为其直流侧电压为一定值,即v dc(t)=V dc。这样当采用双极性调制时,单相VSR交流侧电压v(t)波形为幅值在V dc、-V dc间切换的PWM波形。第k周期中v(t)波形如图4所示。
图4 交流测电压波形 (2)电感端电压v L(t) 单相vsr网侧电感端电压v L(t)等于电网电动势e(t)与其交流侧电压v(t)之差,即 v L(t)=e(t)-v(t)。若令e(t)=E m sinωt,且当开关频率远高于电网基波频率时,第k个开关周期中e(t)可近似为一常值,即 e(t) ≈ e(kT s)=E m sinωkTs。其中,kT s ≤ t ≤ (k+1)T s。如图5所示。 图5 电感电压波形 (3)网侧电流i(t) 若忽略单相VSR网侧电阻,则网侧电流i(t)为:i(t)=1/L∫v L(t)d t=1/L∫[e(t)-v(t)]d t 得第k个开关周期网侧电流表达式为:i(t′)=1/L(E m sinωkTs-V dc)t′+i(t′=0) (0≤t′
三相电压源型PWM整流器 PI调节器参数整定的原理和方法 1引言 1.1 PID调节器简介 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。目前,在工业过程控制中,95%以上的控制回路具有PID结构。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。 图1-1 PID控制系统原理图 PID控制器传递函数常见的表达式有以下两种: (1) ()i p d K G s K K s s =++ ,Kp代表比例增益,Ki代表积分增益,Kd代表微 分增益;
(2) 1 () p d i G s K T s T s =++ (也有表示成 1 ()(1) p d i G s K T s T s =++),Kp代表比 例增益,Ti代表积分时间常数,Td代表微分时间常数。 这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。 ?比例(P,Proportion)控制 比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产 生,调节器立即产生控制作用,以减少偏差。当仅有比例控制时系统输 出存在稳态误差(Steady-state error)。 ?积分(I,Integral)控制 在积分控制中,控制器的输出与输入误差信号的积分成正比关系。 对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制 系统是有稳态误差的或简称有差系统(System with Steady-state Error)。 为了消除稳态误差,在控制中必须引入“积分项”。积分项对误差取决 于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小, 积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误 差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系 统在进入稳态后无稳态误差。积分作用的强弱取决于积分时间常数Ti, Ti越大,积分作用越弱,反之则越强。 ?微分(D,Differential)控制 在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现 振荡或者失稳。其原因是在于由于存在有较大惯性组件(环节)或有滞 后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。 解决的办法是使抑制误差的作用“超前”,即在误差接近零时,抑制误 差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是 不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微 分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就