
第七章 矩阵位移法
一、是非题
1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。
8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。
二、选择题
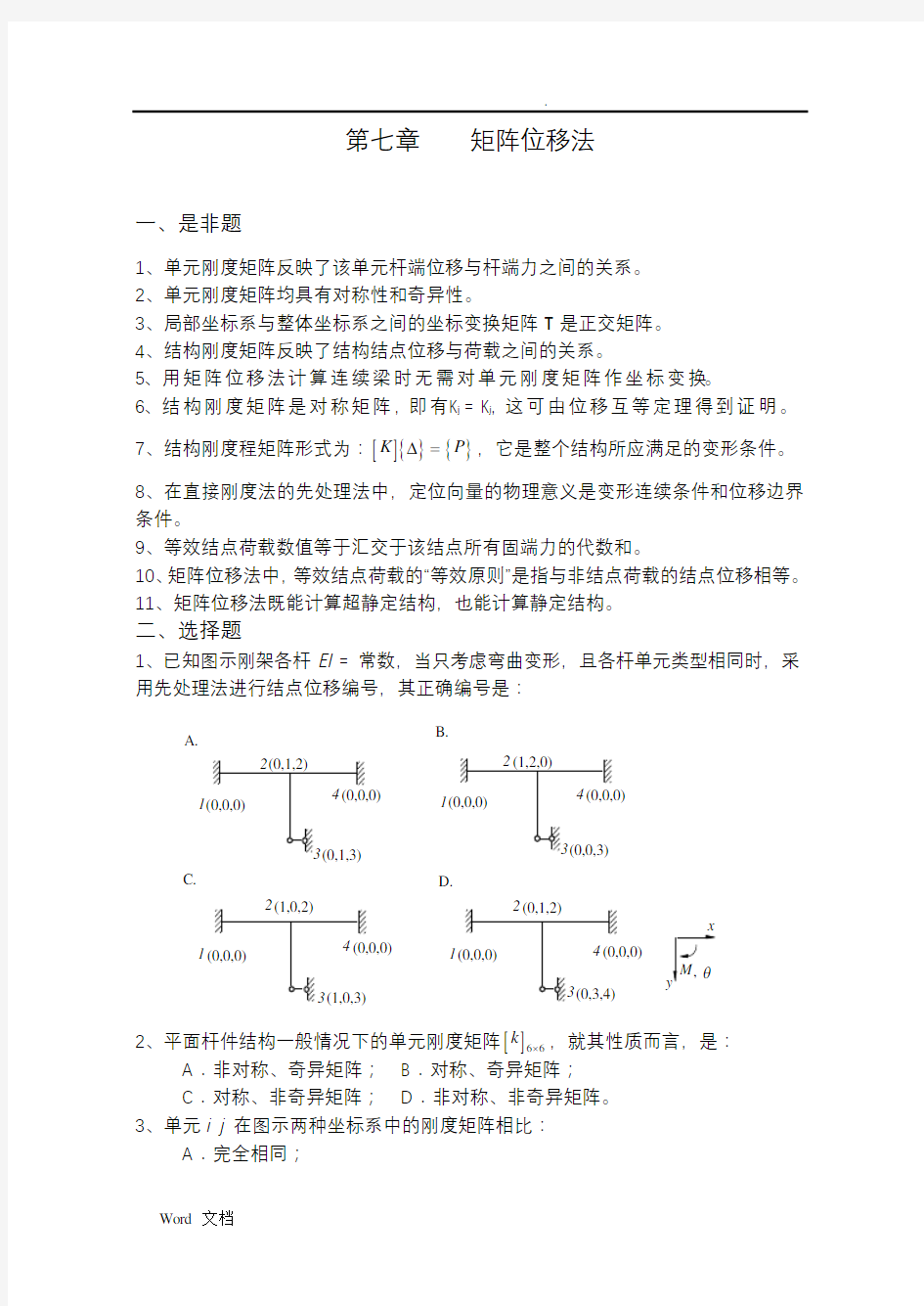
1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:
(0,1,2)
(0,0,0)
(0,0,0)
(0,1,3)
(0,0,0)(1,2,0)
(0,0,0)(0,0,3)
(1,0,2)
(0,0,0)
(0,0,0)(1,0,3)
(0,0,0)
(0,1,2)
(0,0,0)(0,3,4)
A.
B.
C.
D.
2134123412341234
2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵;
C .对称、非奇异矩阵;
D .非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比:
A .完全相同;
B .第2、3、5、6行(列)等值异号;
C .第2、5行(列)等值异号;
D .第3、6行(列)等值异号。
x
i
4、矩阵位移法中,结构的原始刚度程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。
5、单 元 刚 度 矩 阵 中 元 素 k ij 的 物 理 意 义 是 :
A .当 且 仅 当 δi =1 时 引 起 的 与 δj 相 应 的 杆 端 力 ;
B .当 且 仅 当 δj =1时 引 起 的 与 δi 相 应 的 杆 端 力 ;
C .当 δj =1时 引 起 的 δi 相 应 的 杆 端 力 ;
D .当 δi =1时 引 起 的 与 δj 相 应 的 杆 端 力。
三、填充题
1、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
2、图 示 刚 架 用 两 种 式 进 行 结 点 编 号 ,结 构 刚 度 矩 阵 最 大 带 宽 较 小 的 是 图
。
35
641
2
71
234567
(a)
(b)
3、图 示 梁 结 构 刚 度 矩 阵 的 主 元 素 K K 1122== , 。
l
l
4、图 示 桁 架 结 构 刚 度 矩 阵 有 个 元 素 ,其 数 值 等 于 。
3m
3m A
B
C D
EA
EA
EA
5、用 矩 阵 位 移 法 解 图 示 连 续 梁 时 ,结 构 的 综 合 结 点 荷 载 是
l /2
l
l l /2
6、已知图示桁架杆件①的单元刚度矩阵为式(a),又已知各结点位移为式(b),则杆件①的轴力(注明拉力或压力)应为N
①
= 。
l
[]k EA l u v u v u v u v Pl EA ①
=
--????????
??????????????????????????????????=-????????????????????
?
??
???????1
(a) b)010*********
005100230011223344ΛΛΛΛ(
四、计算题
1、用先处理法写出图示梁的整体刚度矩阵[]K 。
1
2
3
l
l
l
i 0
123i i
2、用先处理法写出图示梁的结构刚度矩阵[]K 。
1
2
3
l
l
4
l
EI EI EI 233、计算图示结构的综合结点荷载列阵{}P 。
l /2
l /2l /2
l /2
l
l
4、计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
l /2
l l /2
5、已 知 图 示 连 续 梁
结 点 位 移 列 阵 {}θ如 下 所
示 ,试 用 矩 阵 位 移 法 求 出 杆 件 23
的 杆 端 弯 矩 并 画 出 连 续 梁 的 弯 矩 图 。设 q = 20kN /m ,23 杆 的 i =??10106.kN cm 。
{}θ=--????????
??
??
???-365714572286104
....rad
6、已知图示梁结点转角列阵为{}[]
?=056516822
-/ /T
ql i ql i ,EI =常数。计算
B 支座的反力。
1m
1m
7、试 用 矩 阵 位 移 法 解 图 示 连 续 梁 ,绘 弯 矩 图 。EI = 已 知 常 数 。
x
θ
8、试 求 结 构 原 始 刚 度 矩 阵 中 的 子 块 []K 22 ,已 知 单 元 ①的 整 体 坐 标 的 单 元 刚
度 矩 阵 为 :
[]K ①
=-?-?---?-?????
???
?
???
?
72
360072
36003600360072360036003600110
3600210442101107244
l
l
9、用先处理法写出图示结构的结构刚度矩阵[]K 。E =常数。
l
l
10、用先处理法计算图示连续梁的结点荷载列阵{}P 。
m
4m
4
m
4
11、计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
m
3m
3m 4m 4
12、已 知 图 示 两 端 固 定 梁 跨 中 结 点 C 的 竖 向 位 移 为 ?CV l EI =-5123
() ,转 角 ?C =0 ,l =5m ,EI =常 数 。试 求 单 元 ① 、② 的 杆 端 力 列 阵 。
l
l
13、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
123l
l
4l
5EI
2EI
EA
(0,0,0)
(0,0,1)
(0,2,3)
(0,0,0)
(0,2,4)(0,0,0)
EI
14、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。
l
15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
[
][]k k 1112 [][]
k k 2122 []
k =
i
i i
i
i
单刚分块形式为 :
16、已知图示结构在整体坐标系中的单元刚度矩阵。用先处理法集成结构刚度矩阵
[]K 。(用子块形式写出)。
[][
]k k 1112 [][
]
k k 2122 []
k =
i
i i
i
i
单刚分块形式为 :
17、用先处理法写出图示刚架的结构刚度矩阵[]K ,只考虑弯曲变形。
EI EI EI
EI=o o
l l
l
18、用先处理法写出图示结构的结构刚度矩阵[]K 。各杆长度为l ,EA 、EI 为常数。
A
B
C
D
19、用先处理法写出以子块表示的图示结构的结构刚度矩阵[]K 。
m
12m
20、用先处理法写出图示刚架结构刚度矩阵[]K 。已知:
[][][]
k k k ①
②
③
===?--------????????????????
???
?10300
00300000123001230030100030503000
0300000123001230030500301004
x
21、计算图示结构结点3的等效结点荷载列阵{}P 3E 。
22
22、计算图示结构结点2的等效结点荷载列阵{}P 2E 。
l /2
l /2
q
23、计算图示结构的综合结点荷载列阵元素431,,P P P 。
l
24、用先处理法计算图示结构的综合结点荷载列阵{}P 。
l
/2
/2
25、计算图示结构结点荷载列阵中的元素654,,P P P 。
l /2
l /2
(0,7,8)
3
26、计算图示结构综合结点荷载列阵中的元素431,,P P P 。
l l l
27、计算图示结构综合结点荷载列阵{}P 中的元素9873,,,P P P P 。
l
l
2
28、计算图示刚架对应于自由结点位移的综合结点荷载列阵{}P 。
m
3
m
3
m
29、计算图示刚架对应自由结点位移的综合结点荷载列阵{}P 。各杆长度为 4m 。
30、计算图示结构结点2的综合结点荷载列阵
{}P 2。
l /2
l l /2
l l
31、计算图示刚架考虑弯曲、轴向变形时的综合结点荷载列阵{}P 。
32、若考虑弯曲、轴向变形,用先处理法写出图示结构综合结点荷载列阵{}P 。
l /2
l
/2
ql
33、考虑弯曲、轴向变形,计算图示结构综合结点荷载列阵{}P 。
m 4m
2m
2m
3
34、考虑弯曲、轴向变形时,用先
处理法计算图示结构综合结点荷载列阵{}P 。
8m
m
5m
6
35、用先处理法计算图示结构的综合结点荷载列阵{}P 。
/2
/2
l
l
36、试 用 矩 阵 位 移 法 解 图 示 结构,绘 弯 矩 图 。
m 1m
m
1kN m
.
37、计算下图结构(a )中杆34的杆端力列阵中的第3个元素和第6个元素。不
计杆件的轴向变形。已知下图结构(a )结点位移列阵为:{}[]T 0.66667 0.2 0.7556- 0 0.3667 0 0.3333 0.2 0.2- 0.1333 0
0.2- 0 0 0=?。
1m
1m
l
l
(a ) (b ) 38、计算上图结构(b )单元③的杆端力列阵{}
③
F
,已知各杆
,cm 300 ,kN/cm 101.2424=?=I E ,cm 202=A cm l 100=,结点2位移列阵
{}[][]T T 2rad cm cm 5313.04596.04730.01012222--??==-θ?v u 。
39、考虑杆件的轴向变形,计算图示结构中单元①的杆端力{}
F ①
。已知:
I =(/),124m
4E =?3107kN /m 2, m 2A =05
.。结点
1的位移列阵
{}[]δ16
11037002
2710151485=??-
--...m m rad T
。
5m
40、计算图示刚架单元①在局部坐标下的杆端力{}
F ①
。已知各杆E 、A 、I 、l 均为
常数,不考虑杆件的轴向变形,
{}[]?=--ql EI
l l 2100002727 0 5 19 0 0T
。
l
q
41、已求得图示结构结点2、3的结点位移为式(a)、(b)并已知单元②的整体坐标的单元刚度矩阵。计算单元②2端的弯矩。(长度单位m ,力单位kN ,角度单位弧度)
(b)10 , (a)1040-160-0.2=5
-5
-ΛΛΛΛ???
????????---=???????????????????????????????108.1593.0333222φφv u v u
[]510
205.1105.1050005005.105
.15.105.1105.1205.1050005005.10
5.15.105
.
1???
????????????????
?-------=②
k
42、用先处理法写出图示桁架的结构刚度矩阵[]K 。已知各杆
EA =常数。
l
43、用先处理法计算图示桁架的综合结点荷载列阵{}P 。
3m
444、计算图示结构的自由结点荷载列阵{}P 。
10kN
45、已知桁架的结点位移列阵如下所示。设各杆EA 相同,且EA l /=103
kN /m 。试
用矩阵位移法求13杆(单元①)在局部坐标系下的杆端力列阵。
{}?=-??????????????????
????
????? 10m
-3
0026941442213655800....
l l
46、试用矩阵位移法解图示桁架,绘轴力图 ,设各杆EA 为常数。
4m
20kN
47、计算单元①的轴力。已知图示结构结点1、
3的结点位移为:[][]u v u v Pl EA 1133 5 1 2 3T
T
=-?/ 。
1
2
3
4
l
①
②
⑤
④
③
48、已知各杆的
E A
=?=-
211010
42
.kN/m, m
22,{}[]T
?
21
009524025689
?
=-
..。计算图示桁架单元①的杆端力列阵。
4m
2kN
49、计算图示结构原始刚度矩阵的元素45
44
,K
K。
l
50、用先处理法写出图示结构的结构刚度矩阵[]K。各杆长度为l 。
A B
C
D
EA
EI
EI
2
51、计算图示结构整体刚度矩阵的元素66
55
44
,
,K
K
K。E 为常数。
l l
13
4
2
A , I
A A
/2
22
A I
,
2A
52、计算图示结构中杆12的杆端力列阵中的第6个元素。已知杆12的杆端位移列阵为{}[]
δ
12
=----
0 0.3257 0.0305 0.1616 0.1667T。
1m
1m
=1kN
EI=1kN m
.2
第七章 矩阵位移法(参考答案)
四、
1、[]K i i i i i i i i i =??????
?
?
??4202224122223333(+) 4(+) 0
2、[]K i i i i i i i =????????
?????
?840012216612 0 对称,i EI l =/ 3、{}P ql ql ql ql =--????????????
??2222242524248//// 4、
{}[]T ql ql pl pl M P 12/)12/8/()8/(22-+-+=
5、
42.88
51.40
90
(kN m).M
6、R ql B
=↑067857.() 7、?
????
??
???-=???????????
?3320392422821θθi i i i
?
???
??=?
?????3
9821121i θθ ()
()
?
?????-=?
???????
????-=?
??
???01249826221121M M M M
8、[]K 2221636003600=????
?
?
? 6104 9、[]K i l i l i l i i i i EI l =-???????
?
???
?=
366622/// 12 4对称,式中:
10、
(0,0)
(1,2)(0,3)
(0,0)
① ② ③
{}P =--?-???????
??
?
? kN 5kN m 16kN m 2
11、
{}[]T P 0 34 7-=
12、 {}
{}
{}
{}
δ
δ①
②
①
②
=-??????????
?????
???=-??????????
?????
???=-??????????
????
?
???=---???????????????
??? , , , 005120512000525252525252525233l EI l EI F F 13、i K l EI i i K l EA k k l i K 4,/,12,/,/361333222====+=
14、K EA l EI l K EI l K 223342
151260=+==//,/,
15、[][][][][][]K K K K K K 222222222421=++=①②③③ ,
16
、
[][][][][][][][]K K K K K K K K =+++??
??
???
?
??22222112112222①③③
③③②④
17、
[]??
????=336l
EI K
18、
(0,0,0)
统一编码如图:
①
② ③
(1,0,4)63(0,0,0)1(1,0,2)4(1,0,3)5
(0,0,0)2
[]
4 0 4 0 0 4
6- 0 0 1222
3???
??
???????
???????????
???? ??+=l EI l EI l EI
l EI l EI l EA K
19、k k k k k k 2211
1221
22
22①②②
②
②③++?????
?
?? 20、
21、{}??
???
?????-=2kN.m 12kN 2kN 3E
P 22、{}P ql ql ql 2E =--????????
??//222
23、P ql P ql P ql 13242
24===-,/,
24、{}P ql ql ql =-??????
??
?
? ///2225242
25、P ql P ql P ql 4562
2212==-=/,/,/
26、P p l P P ql P M P l ql 11334122812=-=--=-+,,
27、P ql P ql P ql P 32
7891112220==-=-=/,
/,/,
28、{}[]P =---6 22 14 5 12 18T
29、{}[]P =---4 10 4 0 6 4T
30、{}P P P Pl 2 =--????????
?
?///23234
31、
(0,0,0)
(1,4,3)
(0,0,0)(1,2,3)
1234 {}P =---?????
?????
?????38170kN kN kN m
32、
[]K =?????????
?
?106120
30032403003004
(1,0,2)
(3,4,5)(0,6,0,)(0,0,0) {}P ql ql ql ql ql =--??
?????????????
??
?
?
?
?? 0111223822
2//// 33、
{}[]P T 40 -32 -14=
34、{}P =--???????
??
?
? kN 10kN 10kN m 10
35、{}T
Pl ql ql P P ????
?
?+--=812,2,2,0,02 36、{}[]?=0 0 0 -0.1569 -0.2338 0.4232 0 0 0T
,2336.02=②
F
37、F F 3603330333=?=-?.,.kN m kN m
38、{}
?????
?????????????????----=kN.m kN kN kN.m kN kN 1321726.193.19561.651726.193.19③
F
39、
40、{}
F
ql ql ql ql ①
分=????????????
???
??
?
???? 0079
02340020800575722....() 41、M 28925②
=-.kN
42、
43、{}P =???
???
8kN 6kN
44、
{}[]kN P T 40,30,20,10--=
45、{}
F
①
=-????????????
??1116011160..kN 46、{}?=(/())1EA ×[]T 1167.111
- 137.680-00
1139.555- 0
0322.342
{}
[]F
①
=-85581.kN 85.581kN T
47、N
P ①
=3(压 力 )
48、{}
???
???
????????-=0505 kN kN ①
F
49、
l EA
l
EI K +
=3
44
12
45=K
2134(1,2,3)
(10,11,12)
(7,8,9)(4,5,6)
(4,5,0)
①②③
(7,8,0)
50、
(0,0,0)
(0,0,0)
(1,2,3)(0,0,0)(1,2,0)单元结点位移编码如图:
③
①②
13524
51、K EA l K EI l EA l K EI l 4455366336412==+=/,//,/
52、4319.066
-==F S
第七章 矩阵位移法 一、是非题 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 ? 8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 二、选择题 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。 — 3、单元i j 在图示两种坐标系中的刚度矩阵相比:
第九章 矩阵位移法 【练习题】 9-1 是非题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 9-2 选择题: 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比: A .完全相同; B .第2、3、5、6行(列)等值异号; C .第2、5行(列)等值异号; D .第3、6行(列)等值异号。
第八章 矩阵位移法 – 老八校 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4 l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l 1 3 4 2 A , I A A /222A I , 2A 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 :
第七章 矩阵位移法 一、就是非题 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性与奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 就是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 6、结 构 刚 度 矩 阵 就是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 7、结构刚度方程矩阵形式为:[]{}{}K P ?=,它就是整个结构所应满足的变形条件。 8、在直接刚度法的先处理法中,定位向量的物理意义就是变形连续条件与位移边界条件。 9、等效结点荷载数值等于汇交于该结点所有固端力的代数与。 10、矩阵位移法中,等效结点荷载的“等效原则”就是指与非结点荷载的结点位移相等。 11、矩阵位移法既能计算超静定结构,也能计算静定结构。 二、选择题 1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号就是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 2、平面杆件结构一般情况下的单元刚度矩阵[]k 66?,就其性质而言,就是: A.非对称、奇异矩阵; B.对称、奇异矩阵; C.对称、非奇异矩阵; D.非对称、非奇异矩阵。 3、单元i j 在图示两种坐标系中的刚度矩阵相比: A.完全相同; B.第2、3、5、6行(列)等值异号;
超静定结构计算一S移法 —.判断题: Is判断下列结构用位移法计算时基本未知呈的数目。 2、位移法求解结构力时如果Mp图为零,则自由项血一走为零。 3、位移法未知呈的数目与结构的超静定次数有关。 4、位移法的基本结构可以是静定的,也可以是超静走的。 5、位移法典型方程的物理意义反映了原结构的位移协调条件。 二计算题: (2) (3) (1) (6) £/=■ El El EA 2EI 、b EA E/=oc d 4EI一— J E/=oo 2E1 4A7 2EI 4 El
12.用位移法计算图示结构并作〃图,横梁刚度EA -8 ,两柱线刚度/相同。 13、用位移法计算图示结构并作〃图。F/二常数。 14、求对应的荷载集度g。图示结构横梁刚度无限大。已知柱顶的水平位移为512/(3 曰)(T)。 15、用位移法计算图示结构州乍M图。曰=常数。
16、用位移法计算图示结构r求出未知呈,各杆曰相同。 4m 4m 19、用位移法计算图示结构并作〃图。 -2/ 2f q 二i i 20、用位移法计算图示结构并作〃图。各杆日=営数r q = 20kN/m o 6m 4 ------- B 6m 6m R --- k ----- 1 23、用位移法计算图示结构州乍M图。曰=常数。 7T7F 24、用位移法计算图示结构州乍M图。曰=常数。
°^=ZJ 週AV 酔辭圍闕¥觀⑨由、充 。回申Z7阴甘县欲 遍如士星與莎竺园蔑44辛觀⑨由、6 乙 Ic n n M M I Z M f c/i in
38、用位移法计算图示结构并作〃图。曰=常数。 42、用位移法计算图示结构州乍〃图。 43、用位移法计算图示结构州乍〃图。曰=常数。 48、已知0点的位移0,求几
结构力学自测题(第八单元) 矩阵位移法 姓名 学号 一、是 非 题(将 判 断 结 果 填 入 括 弧 :以 O 表 示 正 确 ,以 X 表 示 错 误 ) 1、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。 ( ) 2、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有 K ij = K ji ,这 可 由 位 移 互 等 定 理 得 到 证 明 。 () 3、图 示 梁 结 构 刚 度 矩 阵 的 元 素 K EI l 113 24=/ 。 ( ) EI l l EI 212 x y M , θ 附: ????? ?????????? ?????????? ???? ?--- -----l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA 460260612061200000260460 6120612000002 22323222323 4、在 任 意 荷 载 作 用 下 ,刚 架 中 任 一 单 元 由 于 杆 端 位 移 所 引 起 的 杆 端 力 计 算 公 式 为 :{} [][]{}F T K e e e =δ 。 ( ) 二、选 择 题 ( 将 选 中 答 案 的 字 母 填 入 括 弧 内 ) 1、已 知 图 示 刚 架 各杆 EI = 常 数,当 只 考 虑 弯 曲 变 形 ,且 各 杆 单 元 类 型 相 同 时 ,采 用 先 处 理 法 进 行 结 点 位 移 编 号 ,其 正 确 编 号 是 : (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0) (1,2,0) (0,0,0) (0,0,3) (1,0,2) (0,0,0) (0,0,0) (1,0,3) (0,0,0) (0,1,2) (0,0,0) (0,3,4) A. B. C. D. 2 1 3 4 1 2 3 4 1 2 3 4 1 2 3 4 x y M , θ ( ) 2、平 面 杆 件 结 构 一 般 情 况 下 的 单 元 刚 度 矩 阵 []k 66?, 就 其 性 质 而 言 ,是 : ( ) A .非 对 称 、奇 异 矩 阵 ; B .对 称 、奇 异 矩 阵 ; C .对 称 、非 奇 异 矩 阵 ; D .非 对 称 、非 奇 异 矩 阵 。 3、单 元 i j 在 图 示 两 种 坐 标 系 中 的 刚 度 矩 阵 相 比 : A . 完 全 相 同 ; B . 第 2、3、5、6 行 (列 ) 等 值 异 号 ; C . 第 2、5 行 (列 )等 值 异 号 ; D . 第 3、6 行 (列 ) 等 值 异 号 。 ( ) i j y x i j y x M , θ M , θ 4、矩 阵 位 移 法 中 ,结 构 的 原 始 刚 度 方 程 是 表 示 下 列 两 组 量 值 之 间 的 相 互 关 系 : ( ) A .杆 端 力 与 结 点 位 移 ; B .杆 端 力 与 结 点 力 ; C .结 点 力 与 结 点 位 移 ; D .结 点 位 移 与 杆 端 力 。 5、单 元 刚 度 矩 阵 中 元 素 k ij 的 物 理 意 义 是 : A .当 且 仅 当 δi =1 时 引 起 的 与 δj 相 应 的 杆 端 力 ; B .当 且 仅 当 δj =1时 引 起 的 与 δi 相 应 的 杆 端 力 ; C .当 δj =1时 引 起 的 δi 相 应 的 杆 端 力 ; D .当 δi =1时 引 起 的 与 δj 相 应 的 杆 端 力。 () 6、用 矩 阵 位 移 法 解 图 示 连 续 梁 时 ,结 点 3 的 综 合 结 点 荷 载 是 : A .[]-ql ql 2 12 T 132 ; B .[]ql ql 2132 12T -; C .[]--ql ql 2112 12T ; D .[]ql ql 2112 12T 。 ( ) 123 l /2 l l ql 2 q 4 ql l /2 x y M , θ 7、用 矩 阵 位 移 法 解 图 示 结 构 时 ,已 求 得 1 端 由 杆 端 位 移 引 起 的 杆 端 力 为 {}[] T F 461--=,则 结 点 1 处 的 竖 向 反 力 Y 1 等 于 : A .6-; B .-10; C .10 ; D .14 。 ( ) 2m 4m 12 3 M 1 Y 20kN/m 1 x y M , θ 三、填 充 题 ( 将 答 案 写 在 空 格 内) 1、图 示 桁 架 结 构 刚 度 矩 阵 有 个 元 素 ,其 数 值 等 于 。 2m 3m 3m A B C D EA EA EA x y M , θ 2、图 示 刚 架 用 两 种 方 式 进 行 结 点 编 号 ,结 构 刚 度 矩 阵 最 大 带 宽 较 小 的 是 图 。 3 5 641 2 7 1 2345 6 7 (a) (b) 3、图 示 梁 结 构 刚 度 矩 阵 的 主 元 素 K K 1122== , 。 l l 2EI EI 1 2 x y M , θ 四、图 a 、b 所 示 两 结 构 ,各 杆 EI 、l 相 同 ,不 计 轴 向 变 形 , 已 求 得 图 b 所 示 结 构 的 结 点 位 移 列 阵 为 {}?=-???? ? ?ql EI ql REI ql EI 34396192192 T 。试 求 图 a 所 示 结 构 中 单 元 ① 的 杆 端 力 列 阵。 q 1 2 3 4(a) ql 2 ② ③ ① 1 2 34 (b) ② ③ ① x y M , θ 五、图 a 所 示 结 构 (整 体 坐 标 见 图 b ),图 中 圆 括 号 内 数 码 为 结 点 定 位 向 量 (力 和 位 移 均 按 水 平 、竖 直 、转 动
《结构力学》经典习题及详解 一、判断题(将判断结果填入括弧内,以 √表示正确 ,以 × 表示错误。) 1.图示桁架结构中有3个杆件轴力为0 。(×) 2.图示悬臂梁截面A 的弯矩值是ql 2。 (×) l l 3.静定多跨梁中基本部分、附属部分的划分与所承受的荷载无关。(√ ) 4.一般来说静定多跨梁的计算是先计算基本部分后计算附属部分。(× ) 5.用平衡条件能求出全部内力的结构是静定结构。( √ ) 6.求桁架内力时截面法所截取的隔离体包含两个或两个以上的结点。(√ ) 7.超静定结构的力法基本结构不是唯一的。(√) 8.在桁架结构中,杆件内力不是只有轴力。(×) 9.超静定结构由于支座位移可以产生内力。 (√ ) 10.超静定结构的内力与材料的性质无关。(× ) 11.力法典型方程的等号右端项不一定为0。 (√ ) 12.计算超静定结构的位移时,虚设力状态可以在力法的基本结构上设。(√) 13.用力矩分配法计算结构时,汇交于每一结点各杆端分配系数总和为1,则表明分配系 数的计算无错误。 (× ) 14.力矩分配法适用于所有超静定结构的计算。(×) 15.当AB 杆件刚度系数i S AB 3 时,杆件的B 端为定向支座。 (×)
二、单项选择题(在每小题的四个备选答案中选出一个正确答案,并将其代号填在题干后面的括号内。不选、错选或多选者,该题无分。) 1.图示简支梁中间截面的弯矩为( A ) q l A . 82ql B . 42ql C . 22 ql D . 2ql 2.超静定结构在荷载作用下产生的内力与刚度(B ) A . 无关 B . 相对值有关 C . 绝对值有关 D . 相对值绝对值都有关 3.超静定结构的超静定次数等于结构中(B ) A .约束的数目 B .多余约束的数目 C .结点数 D .杆件数 4.力法典型方程是根据以下哪个条件得到的(C )。 A .结构的平衡条件 B .结构的物理条件 C .多余约束处的位移协调条件 D .同时满足A 、B 两个条件 5. 图示对称结构作用反对称荷载,杆件EI 为常量,利用对称性简化后的一半结构为(A )。 6.超静定结构产生内力的原因有(D ) A .荷载作用与温度变化 B .支座位移 C .制造误差 D .以上四种原因
第八章 矩阵位移法 1、(O) 2、(X) 3、(O) 4、(X) 5、(X) 6、(O) 7、(O) 8、(X) 9、(O) 10、(O) 11、(A) 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234x y M , θ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 123l l 4l l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) x y M , θ EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l (0,0,1) (0,5,0) (2,3,4) l ① ② 123x y M , θ 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l l 1 3 4 2A , I A A /222A I , 2A x y M , θ 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 3 12① ② ③ [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 : 4x y M , θ
1.图示平面刚架的缩减后的总刚的阶数为___________。(中南大学2011) 4.(14分)图示平面结构用矩阵位移法计算,引入支承条件的总体刚度矩阵是多少阶?求 结点2、结点5的综合结点荷载列阵。(中南大学2011) q 5.(13分)图示平面结构用矩阵位移法计算,原始刚度矩阵是多少阶?试求结点2、结点 3的综合结点荷载列阵。(中南大学2012) 4m4m 4. 矩阵位移法只能计算超静定结构,不能计算静定结构。()(中南大学2012) 6.(13分)图示平面结构用矩阵位移法计算,求结点3、结点4和结点5的综合结点荷载 列阵。(中南大学2013) 2.已求得图示梁3个结点的转角列阵为{ }=[0i / ql -56 2i / ql168 52]T,EI为常数。则B支座的反力为___________。(中南大学2013) 3. 在矩阵位移法中将单元集合成整体时应引入结构的物理关系和变形连续条件。()(中南大学2013)
7.(15分)计算图示结构结点2和结点6的综合结点荷载列阵{}2P和{}6P。(中南大学 2014) 3.图示结构的原始刚度矩阵的最大带宽为___________。(中南大学2014) 10 9 8 7 611 13 15 18 19 17 16 14 12 5 4 3 2 1 3. 已用矩阵位移法求得图a所示结构单元③的杆端力(整体坐标)为{}= F[-3 -1 -4 3 1 -2]T(单位:m kN , N k?),则单元③的弯矩图为图b。()(中国矿业大学2011)(中南大学2014) 2 4 M图(kN·m) (a)(b) 七、已知图示连续梁结点位移列阵{}θ如下所示,试用矩阵位移法求出23杆件的杆端弯矩,并画出该连续梁的弯矩图。已知图中m / kN q20 =,23杆的线刚度cm kN . i? ? =6 10 1 {}θ= ? ? ? ? ? ? ? ? ? ? ? ? ? ? 86 2 72 5 14 7 65 3 . . - . . - (中国矿业大学2012) q 3m6m3m 7-1、用矩阵位移法分别计算图(a)所示连续梁在图(b)和图(c)两种荷载作用下的结点角位移和各单元杆端力,边界采用后处理法,略去轴向变形影响。(中国矿业大学2013)
第9章 矩阵位移法 习 题 9-1:请给图示结构编号(同时用先处理法和后处理法)及建立坐标。 题9-1图 9-2:求图示连续梁的整体刚度矩阵。 题9-2图 9-3:求图示刚架的整体刚度矩阵。 (c ) (e )
题9-3图 9-4:求图示组合结构的整体刚度矩阵。 题9-4图 9-5:求图示桁架结构的整体刚度矩阵,所有杆件的EA 均相同。 题9-5图 9-6:求图示排架结构的整体刚度矩阵。 题9-6图 9-7:求图示结构的等效结点荷载,请利用结构的对称性。 1kN/m
题9-7图 9-8:求图示结构的等效结点荷载,请利用结构的对称性。 题9-8图 9-9:求图示结构的等效结点荷载。 题9-9图 9-10:求出图示结构的荷载列阵。 题9-10图 9-11:求出图示结构的荷载列阵,请分别用先处理法和后处理法进行编号。 q q
题9-11图 9-12:求图示结构的荷载列阵,考虑轴向变形。 题9-12图 9-13:求图示结构的荷载列阵。 题9-13图 9-14:图示连续梁中间支座发生了下向的移动a ,请求出其整体刚度方程。 题9-14图 10kN/m q
9-15:请求出图示连续梁的整体刚度方程。 题9-15图 9-16:求图示连续梁的整体刚度矩阵。 题9-16图 9-17:图示结构温度发生了变化,请求出整体刚度方程。杆件的EI 、EA 相同。 题9-17图 9-18:图示结构温度发生了变化,请求出整体刚度方程。 题9-18图 9-19:图示结构发生了支座移动,请画出结构的内力图。 00
第八章 矩阵位移法 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 ( )
二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4 l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l 1 3 4 2 A , I A A /222A I , 2A 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 :
超静定结构计算——位移法 一、判断题: 1、判断下列结构用位移法计算时基本未知量的数目。 (1) (2) (3) (4) (5) (6) EI EI EI EI 2EI EI EI EI EA EA a b EI= EI=EI= 24442 2、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。 3、位移法未知量的数目与结构的超静定次数有关。 4、位移法的基本结构可以是静定的,也可以是超静定的。 5、位移法典型方程的物理意义反映了原结构的位移协调条件。 二、计算题: 12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度 i 相同。 2 13、用位移法计算图示结构并作M 图。E I =常数。
l l l/2l/2 14、求对应的荷载集度q。图示结构横梁刚度无限大。已知柱顶的水平位移为 () 5123 /() EI→。 12m12m 8m q 15、用位移法计算图示结构并作M图。EI =常数。 l l l 16、用位移法计算图示结构,求出未知量,各杆EI相同。 4m 19、用位移法计算图示结构并作M图。 q l l
20、用位移法计算图示结构并作M 图。各杆EI =常数,q = 20kN/m 。 6m 6m 23、用位移法计算图示结构并作M 图。EI =常数。 l l 2 24、用位移法计算图示结构并作M 图。EI =常数。 q 29、用位移法计算图示结构并作M 图。设各杆的EI 相同。 q q l l /2/2 32、用位移法作图示结构M 图。 E I =常数。
q l l /2 l /2l 36、用位移法计算图示对称刚架并作M 图。各杆EI =常数。 l l 38、用位移法计算图示结构并作M 图。EI =常数。 q l l l l 42、用位移法计算图示结构并作M 图。 2m 2m 43、用位移法计算图示结构并作M 图。EI =常数。
第十章位移法 §10-1 概述 位移法——以结点位移(线位移,转角)为基本未知量的方法。 基本概念:以刚架为例(图10-1) 基本思路:以角位移Z1为基本未知量 平衡条件——结点1的力矩平衡 位移法要点:一分一合 ①确定基本未知量(变形协调)基本体系-独立受力变形的杆件 ②将结构拆成杆件-杆件分析(刚度方程-位移产生内力、荷载产生内力) ③将结构杆件合成结构:整体分析——平衡条件——建立方程 §10-2 等截面直杆的转角位移方程 单跨超静定梁——由杆端位移求杆端力——转角位移方程 矩阵形式 一、端(B端)有不同支座时的刚度方程 (1)B端固定支座 (2)B端饺支座 (3)B端滑动支座 二、由荷载求固端力(3*,4,11*,12,19,20) (1)两端固定 (2)一端固定,一端简支 (3)一端固定,一端滑动(可由两端固定导出) 三、一般公式 叠加原理杆端位移与荷载共同作用 杆端弯矩:(10-1) 位移法意义(对于静定、超静定解法相同) 基本未知量-被动(由荷载等因素引起) →按主动计算——位移引起杆端力+荷载的固端力 →结点满足平衡 正负号规则——结点转角(杆端转角) 弦转角——顺时针为正 杆端弯矩 位移法三要素: 1.基本未知量-独立的结点位移 2.基本体系-原结构附加约束,分隔成独立变力变形的杆件体系。 3.基本方程-基本体系在附加约束上的约束力(矩)与原结构一致 (平衡条件)
§10-3基本未知量的确定 角位移数=刚结点数(不计固定端) 线位移数=独立的结点线位移 观察 几何构造分析方法——结点包括固定支座)变铰结点 铰结体系的自由度数=线位移数 ――即使其成为几何不变所需添加的链杆数。 §10-4典型方程及计算步骤 典型方程(10-5、6) 无侧移刚架的计算 无侧移刚架-只有未知结点角位移的刚架(包括连续梁)(△=0) 有侧移刚架计算 有侧移刚架――除结点有位移外还有结点线位移 求解步骤: (1)确定基本未知量:Z i (按正方向设基本未知量)——基本体系, (2)作荷载、Z i = 1 —— ()()01i P i i M M ??==、图 (3)求结点约束力矩:荷载 —— 自由项R Ip ,及ΔJ = 1 —— 刚度系数 k IJ (4)建立基本方程:[k IJ ]{ Z i } + { R Ip } = {0} —— 附加约束的平衡条件 求解Z i (Δi ) (5) 叠加法作i i P Z M M M ∑+= §10-5 直接建立位移法方程 求解步骤: (1)确定基本未知量:Z i (按正方向设基本未知量)——基本体系, (2)写杆端弯矩(转角位移方程) (3)建立位移法方程—— 附加约束的平衡,求解Z i (4) 叠加法作i i P Z M M M ∑+= §10-6 对称性利用 对称结构 对称荷载作用 —— 变形对称,内力对称 (M 、N 图对称,Q 图反对称——Q 对称) 反对称荷载作用 —— 变形反对称,内力反对称 (M 、N 图反对称,Q 图对称——Q 反对称) —— 取半跨 对称结构上的任意荷载 ——对称荷载+反对称荷载
矩阵位移法 一判断题(6分,每道题3分) 1.(3分)在矩阵位移法中,结构在等效结点荷载作用下的内力,与结构在原有 荷载作用下的内力相同。( ) 2.(3分)图示刚架(E 、A 、I =常数)的结构刚度矩阵的元素K E I l E A l 22312=+//。() l 2y 二选择题(8分,每道题4分) 1.(4分)电算分析中,结构原始刚度矩阵引入边界条件后: A .一定是非奇异的; B .可能奇异,也可能非奇异,要视具体边界条件而定; C .只要引入的条件多于3个,则一定是非奇异的; D .一定是奇异的。( ) 2.(4分)桁架中任一单元的最后内力计算公式为: {}[]{}[]e q e e e F k F -=δ A.; {} []{} {}B. F T k e e e =δ; {}[][]{}[]e q e e e F k T F +=δ C.; {}[][]{}[]e q e e e F k T F -=δ D.。 ( ) 三填空题(12分,每空4分) 1.(4分)已知局部坐标系中单元刚度矩阵[]k e 及单元固端力列阵{}F e 0和整体坐标系中单元杆端位移列阵{}δe 以及坐标转换矩阵[]T ,则单元杆端力列阵 {} F e = 。
2.(8分)图a 所示结构(图中圆括号内数码为结点定位向量,力和位移均按竖直,转动方向顺序排列)。则求结构刚度矩阵[K ]中元素=11K =13K 。 (a) 四计算题(共17分) 1.(8分)按先处理法求图示结构的结点荷载列阵{}P 。只考虑弯曲变形,各杆EI=常数。 m 2.(9分)求图示刚架单元①在局部坐标下的杆端力列阵{} F ① 。已知各杆E 、A 、 I 、l 均为常数。不计轴向变形时 {}[]T 2 0 0 19,0 0 27 , 5 0 27 , 0 0 01000l l EI ql = ? 2 3 q ② y
第7章位移法 一. 教学目的 掌握位移法的基本概念; 正确的判断位移法基本未知量的个数; 熟悉等截面杆件的转角位移方程; 熟练掌握用位移法计算荷载作用下的刚架的方法 了解位移法基本体系与典型方程的物理概念和解法。 二. 主要章节 §7-1 位移法的基本概念 §7-2 杆件单元的形常数和载常数—位移法的前期工作 §7-3 位移法解无侧移刚架 §7-4 位移法解有侧移刚架 §7-5 位移法的基本体系 §7-6 对称结构的计算 *§7-7支座位移和温度改变时的位移法分析(选学内容) §7-8小结 §7-9思考与讨论 三. 学习指导 位移法解超静定结构的基础是确定结构的基本未知量以及各个杆件的转角位移方程,它不仅可以解超静定结构,同时还可以求解静定结构,另外,要注意杆端弯矩的正负号有新规定。 四. 参考资料 《结构力学(Ⅰ)-基本教程第3版》P224~P257 第六章我们学习了力法,力法和位移法是计算超静定结构的两个基本方法,力法发展较早,位移法稍晚一些。力法把结构的多余力作为基本未知量,将超静定结构转变为将定结构,按照位移条件建立力法方程求解的;而我们今天开始学的这一章位移法则是以结构的某些位移作为未知量,先设法求出他们,在据以求出结构的内力和其他位移。由位移法的基本原理可以衍生出其他几种在工程实际中应用十分普遍的计算方法,例如力矩分配法和迭代法等。因此学习本章内容,不仅为了掌握位移法的基本原理,还未以后学习其他的计算方法打下良好的基础。此外,应用微机计算所用的直接刚度法也是由位移法而来的,所以本章的内容也是学习电算应用的一个基础。
本章讨论位移法的原理和应用位移法计算刚架,取刚架的结点位移做为基本未知量,由结点的平衡条件建立位移法方程。位移法方程有两种表现形式:①直接写平衡返程的形式(便于了解和计算)② 基本体系典型方程的形式(利于与力法及后面的计算机计算为基础的矩阵位移法相对比,加深理解) §7-1 位移法的基本概念 1.关于位移法的简例 为了具体的了解位移法的基本思路,我们先看一个简单的桁架的例子:课本P225。图7-1和图7-2所示。 (a) (a) (b) (b) 图7-1 图7-2 第一步:从结构中取出一个杆件进行分析。(杆件分析) 图7-2中杆件AB 如已知杆端B 沿杆轴向的位移为i u (即杆件的伸长)则杆端力Ni F 为: i i i Ni u l EA F (7-1) E-为弹性模量,A-为杆件截面面积,i l -为杆件长度
第十二章 矩阵位移法 【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。分别用位移法和矩阵位移法计算。 图12-1 解:(1)位移法解 ?基本未知量和基本结构的确定 用位移法解的基本结构如图c 所示。这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。 ?位移法基本方程的建立 ?? ? ?? =+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式
?? ??? ?????=??????????+??????????θθθ?? ????????0003213213332 31 232221131211P P P R R R K K K K K K K K K ?系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图) 由图d ,结点力矩平衡条件 ∑=0M ,得 EI K 411=,l EI K 221=,031=K 由图e ,结点力矩平衡条件 ∑=0M ,得 l EI K 212=,l EI l EI l EI K 84422=+=,l EI K 232= 由图f ,结点力矩平衡条件 ∑=0M ,得 013=K ,l EI K 223=,l EI EI EI K 84433=+= 由图g ,结点力矩平衡条件 ∑=0M ,得 81Pl R p -=,2Pl R P -=,03=P R 将系数项和自由项代入位移法基本方程,得 ??? ???????=??????????--+?? ??? ?????θθθ??????????0000118820282024321Pl l EI ?解方程,得?? ????????-= ?? ? ?? ?????θθθ14114162321EI Pl ?由叠加法绘弯矩图,如图h 所示。 (2)矩阵位移法解 ?对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。若用后处理法原始结构刚度阵为44?阶;用先处理法结构刚度阵为33?阶(已知角位移04=θ)。下面采用先处理法来说明矩阵位移法计算过程。 单元标准形式为(图b ) )(e k ?? ????=?? ?? ??????=)()()()() (4224e jj e ji e ij e ii e k k k k l EI l EI l EI l EI
第十章 矩阵位移法 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 ( ) 二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4 l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) EI
13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l ,0) 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l 1 3 4 2A , I A A /222A I , 2A 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。 [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 : 16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵 []K 中的元素,,7877K K EA =常数。,cos α=C ,sin α=S ,C C A ?= S S D S C B ?=?=,,各杆EA 相同。 l [] k EA l i = A B A B D B D A B D -i i ---对称 17、计算图示刚架结构刚度矩阵中的元素8811,K K (只考虑弯曲变形)。设各层高度为h ,各跨长度为l h l 5.0,=,各杆EI 为常数。
第八章 矩阵位移法 – 老八校 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵 [][]K K 22 24 ,。 16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。 ,cos α=C ,sin α=S ,C C A ?= S S D S C B ?=?=,,各杆EA 相同。