
控制机械臂的运动姿态(即控制相邻两个活动构件的相对位置)
控制运动速度(即控制末端执行器运动位置随时间变化的规律)
控制运动加速度(即控制末端执行器在运动过程中的速度变化)
控制机械臂中各动力关节的输出转矩:(即控制对操作对象施加的作用力)
具备操作方便的人机交互功能,机器人通过记忆和再现来完成规定的任务
使机器人对外部环境有检测和感觉功能。工业机器人配备视觉、力觉、触觉等传感器进行测量、识别,判断作业条件的变化。
工业机器人控制系统
1、工业机器人控制系统硬件结构
控制器是机器人系统的核心,国外有关公司对我国实行严密封锁。近年来随着微电子技术的发展,微处理器的性能越来越高,而价格则越来越便宜,目前市场上已经出现了1-2美金的32位微处理器。高性价比的微处理器为机器人控制器带来了新的发展机遇,使开发低成本、高性能的机器人控制器成为可能。为了保证系统具有足够的计算与存储能力,目前机器人控制器多采用计算能力较强的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片组成。此外,由于已有的通用芯片在功能和性能上不能完全满足某些机器人系统在价格、性能、集成度和接口等方面的要求,这就产生了机器人系统对SoC (SystemonChip)技术的需求,将特定的处理器与所需要的接口集成在一起,可简化系统外围电路的设计,缩小系统尺寸,并降低成本。例如,Actel公司将NEOS或ARM7的处理器内核集成在其FPGA产品上,形成了一个完整的SoC系统。在机器人运动控制器方面,其研究主要集中在美国和日本,并有成熟的产品,如美国DELTATAU公司、日本朋立株式会社等。其运动控制器以DSP技术为核心,采用基于PC的开放式结构。
2、工业机器人控制系统体系结构
在控制器体系结构方面,其研究重点是功能划分和功能之间信息交换的规范。在开放式控制器体系结构研究方面,有两种基本结构,一种是基于硬件层次划分的结构,该类型结构比较简单,在日本,体系结构以硬件为基础来划分,如三菱重工株式会社将其生产的PA210可携带式通用智能臂式机器人的结构划分为五层结构;另一种是基于功能划分的结构,它将软硬件一同考虑,其是机器人控制器体系结构研究和发展的方向。
3、控制软件开发环境
在机器人软件开发环境方面,一般工业机器人公司都有自己独立的开发环境和独立的机器人编程语言,如日本Motoman公司、德国KUKA公司、美国的Adept公司、瑞典的ABB公司等。很多大学在机器人开发环境(RobotDevelopmentEnvironment)方面已有大量研究工作,提供了很多开放源码,可在部分机器人硬件结构下进行集成和控制操作,目前已在实验室环境下
进行了许多相关实验。
从机器人产业发展来看,对机器人软件开发环境有两方面的需求。一方面是来自机器人最终用户,他们不仅使用机器人,而且希望能够通过编程的方式赋予机器人更多的功能,这种编程往往是采用可视化编程语言实现的,如乐高MindStormsNXT的图形化编程环境和微软RoboticsStudio提供的可视化编程环境。
4、机器人专用操作系统
(1)VxWorks,VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),是Tornado嵌入式开发环境的关键组成部分。VxWorks具有可裁剪微内核结构;高效的任务管理;灵活的任务间通信;微秒级的中断处理;支持POSIX1003.1b实时扩展标准;支持多种物理介质及标准的、完整的TCP/IP网络协议等。
(2)WindowsCE,WindowsCE与Windows系列有较好的兼容性,无疑是WindowsCE推广的一大优势。WindowsCE为建立针对掌上设备、无线设备的动态应用程序和服务提供了一种功能丰富的操作系统平台,它能在多种处理器体系结构上运行,并且通常适用于那些对内存占用空间具有一定限制的设备。(3)嵌入式Linux,由于其源代码公开,人们可以任意修改,以满足自己的应用。其中大部分都遵从GPL,是开放源代码和免费的。可以稍加修改后应用于用户自己的系统。有庞大的开发人员群体,无需专门的人才,只要懂
Unix/Linux和C语言即可。支持的硬件数量庞大。嵌入式Linux和普通Linux 并无本质区别,PC上用到的硬件嵌入式Linux几乎都支持。而且各种硬件的驱动程序源代码都可以得到,为用户编写自己专有硬件的驱动程序带来很大方便。
(4)μC/OS-Ⅱ,μC/OS-Ⅱ是著名的源代码公开的实时内核,是专为嵌入式应用设计的,可用于8位,16位和32位单片机或数字信号处理器(DSP)。它的主要特点是公开源代码、可移植性好、可固化、可裁剪性、占先式内核、可确定性等。
(5)DSP/BIOS,DSP/BIOS是TI公司特别为其TMS320C6000TM,TMS320C5000TM 和TMS320C28xTM系列DSP平台所设计开发的一个尺寸可裁剪的实时多任务操作系统内核,是TI公司的CodeComposerStudioTM开发工具的组成部分之一。DSP/BIOS主要由三部分组成:多线程实时内核;实时分析工具;芯片支持库。利用实时操作系统开发程序,可以方便快速的开发复杂的DSP程序。
5、机器人伺服通信总线技术
目前国际上还没有专用于机器人系统中的伺服通信总线,在实际应用过程中,通常根据系统需求,把常用的一些总线,如以太网、CAN、1394、SERCOS、USB、RS-485等用于机器人系统中。当前大部分通信控制总线可以归纳为两类,即基于RS-485和线驱动技术的串行总线技术和基于实时工业以太网的高速串行总线技术。
智能机器人控制系统
(1)开放性模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线进行通讯。机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输
入。
(2)模块化层次化的控制器软件系统:软件系统建立在基于开源的实时多任务操作系统Linux上,采用分层和模块化结构设计,以实现软件系统的开放性。整个控制器软件系统分为三个层次:硬件驱动层、核心层和应用层。三个层次分别面对不同的功能需求,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能。
(3)机器人的故障诊断与安全维护技术:通过各种信息,对机器人故障进行诊断,并进行相应维护,是保证机器人安全性的关键技术。
(4)网络化机器人控制器技术:目前机器人的应用工程由单台机器人工作站向机器人生产线发展,机器人控制器的联网技术变得越来越重要。控制器上具有串口、现场总线及以太网的联网功能。可用于机器人控制器之间和机器人控制器同上位机的通讯,便于对机器人生产线进行监控、诊断和管理。
智能机器人学习教程 第1章预备知识 1.1虚拟机器人的结构与功能 1.1.1身体结构 在VJC1.5中,有五种型号的机器人:AS-M、AS-MII、AS-UII、AS-InfoX和AS-InfoM。图1-1是虚拟机器人的外形。虚拟机器人的身体结构跟真实的能力风暴智能机器人是相似的。本书中的范例采用的机器人型号均为AS-MⅡ。设置机器人型号的方法参见附录B。 图1-1虚拟机器人外形 1.1.2感觉器官 能力风暴智能机器人的感觉功能,是由机器人的传感器实现的。能力风暴机器人身上安装的传感器有以下几种: 1.红外传感器 红外传感器由红外发射器和红外接收器两部分组成。一旦程序中发出“红外测障”的指令,红外发射器就开始发射红外线。红外线遇到障碍物会反射回来,被红外接收器接收,从而机器人就能判断出障碍物所在的方位。虚拟机器人能够检测左、右、前三个方向的障碍物,跟真实的能力风暴智能机器人基本相同。发射红外线的虚拟机器人如图1-2所示。 图1-2机器人发射红外线示意图 2.光敏传感器
光敏传感器能够检测光线的强度,检测到的值为0~255之间的整数。光线越亮,检测到的数值越小;光线越暗,检测到的数值越大。此项功能跟真实的能力风暴智能机器人是一样的 3.碰撞传感器 虚拟机器人的碰撞传感器能够检测左、右、前、后四个方向的碰撞,型号为AS-InfoX 的机器人只能检测前、左、右三个方向的碰撞。如前所述,虚拟机器人共分五种,它们的的区别主要就体现在碰撞检测功能上。所以读者在打开程序时,无论是例程,还是自己编写保存的程序,如果涉及到“碰撞检测”,必须先设置相应的机器人型号(参见附录B),然后再打开程序、仿真运行。例如:打开例程“自由行走(M).flw”时,由于名称后面带有M,故须先将机器人型号设置为AS-M,然后再打开程序文件、仿真运行。打开例程“自由行走(Info).flw”时,最好先将机器人型号设置为AS-InfoM,然后再打开程序文件、仿真运行。 在碰撞检测功能方面,虚拟机器人跟真实的能力风暴智能机器人有较大差别(参见附录 C、D)。 4.声音传感器 声音传感器能够检测声强大小,检测到的值为0~255之间的整数。数值越小,声音越低;数值越大,声音越响。此项功能跟真实的能力风暴智能机器人是一样的。 5.地面灰度传感器 地面灰度传感器能够检测地面的灰度,检测到的值为0~255之间的整数。地面颜色越深,灰度值越大;地面颜色越浅,灰度值越小。此项功能跟真实的能力风暴智能机器人基本相同。 1.1.3编程语言 能力风暴智能机器人的编程语言是VJC1.5,由机器人C语言(简称JC)和流程图编程语言两部分组成。读者使用仿真版的时候,可以用流程图编程。在用流程图编程的同时,VJC1.5自动生成JC代码,便于读者观察、解释或修改程序,参见图1-3。在图1-3中,左边是流程图,右边是JC代码。在流程图编辑界面中,点击工具栏上的“JC代码”快捷按 钮,即可看到当前程序的JC代码。
工业机器人控制系统组成及典型结构 一、工业机器人控制系统所要达到的功能机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下: 1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。 2、示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。 3、与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。 4、坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。 5、人机接口:示教盒、操作面板、显示屏。 6、传感器接口:位置检测、视觉、触觉、力觉等。 7、位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。 8、故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。 二、工业机器人控制系统的组成 1、控制计算机:控制系统的调度指挥机构。一般为微型机、微处理器有32 位、64 位等如奔腾系列CPU 以及其他类型CPU 。 2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的 CPU 以及存储单元,与主计算机之间以串行通信方式实现信息交互。 3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。 4、硬盘和软盘存储存:储机器人工作程序的外围存储器。 5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。 6、打印机接口:记录需要输出的各种信息。 7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。 8、轴控制器:完成机器人各关节位置、速度和加速度控制。 9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。 10 、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。 11 、网络接口 1) Ethernet 接口:可通过以太网实现数台或单台机器人的直接PC 通信,数据传输速率高达 10Mbit/s ,可直接在PC 上用windows 库函数进行应用程序编程之后,支持TCP/IP 通信协议,通过Ethernet 接口将数据及程序装入各个机器人控制器中。
机器人控制系统 一、工业机器人控制系统应具有的特点 工业机器人控制系统的主要任务是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项。其中有些项目的控制是非常复杂的,这就决定了工业机器人的控制系统应具有以下特点: (1)工业机器人的控制与其机构运动学和动力学有着密不可分的关系,因而要使工业机器人的臂、腕及末端执行器等部位在空间具有准确无误的位姿,就必须在不同的坐标系中描述它们,并且随着基准坐标系的不同而要做适当的坐标变换,同时要经常求解运动学和动力学问题。 (2)描述工业机器人状态和运动的数学模型是一个非线性模型,随着工业机器人的运动及环境而改变。又因为工业机器人往往具有多个自由度,所以引起其运动变化的变量不止个,而且各个变量之间般都存在耦合问题。这就使得工业机器人的控制系统不仅是一个非线性系统,而且是一个多变量系统。 (3)对工业机器人的任一位姿都可以通过不同的方式和路径达到,因而工业机器人的控制系统还必须解决优化的问题。 二、对机器人控制系统的一般要求 机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下: ?记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。 ?示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。 ?与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。?坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。 ?人机接口:示教盒、操作面板、显示屏。 ?传感器接口:位置检测、视觉、触觉、力觉等。 ?位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。?故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障
智能机器人的发展与应用前景 摘要 本文介绍了智能机器人的发展概况、机器人的感官系统、机器人运动系统及人工智能技术在机器人中的应用,智能机器人是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。 关键词: 智能机器人感官仿生人工智能 1.引言 人们通常把机器人划分为三代。第一代是可编程机器人。这种机器人一般可以根据操作人员所编的程序,完成一些简单的重复性操作。这一代机器人是从60年代后半叶开始投入实际使用的,目前在工业界已得到广泛应用。第二代是“感知机器人”,又叫做自适应机器人,它在第一代机器人的基础上发展起来的,能够具有不同程度的“感知”周围环境的能力。这类利用感知信息以改善机器人性能的研究开始于70年代初期,到1982年,美国通用汽车公司为其装配线上的机器人装配了视觉系统,宣告了感知机器人的诞生,在80年代得到了广泛应用。第三代机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,因此能在非特定的环境下作业,称之为智能机器人。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。而感知本身,就是人类和动物所具有的低级智能。因此机器的智能分为两个层次:①具有感觉、识别、理解和判断功能; ②具有总结经验和学习的功能。所以,人们通常所说的第二代机器人可以看作是第一代智能机器人。 2.智能机器人的感官系统 2.1触觉传感器 英国近几年在阵列触觉传感方面开展了相当广泛的研究。例如:Sussex大学和Shack-leton系统驱动公司研制的基于运动的介电电容传感的阵列;由威尔士大学和软件科学公司研制的采用压强技术的装在机器人夹持器上的传感器。 2.2视觉传感 在机器人视觉方面,目前市场上销售的有以下6类传感器:①隔开物体的二维视觉:双态成像;②隔开物体的二维视觉:灰度标成像;③触觉或叠加物体的二维视觉;④二维观察;⑤二维线跟踪;⑥使用透视、立体、结构图示或范围找寻技术从隔开物体中提取三维信息。在这类系统方面,它们只能做一些很简单的操作。例如:为了使机器人具有某种程度的人眼功能,已进行大量的研究工作并向如下两类系统发展:①从一维物体中提取三维信息;②活动机器人导航、探路和躲避障碍物的现场三维分析。伦敦大学目前正在研究一种双目视觉机器人的实时图像处理机。还有正在研究机器人视觉系统的教育机构有:考文垂工业大学、爱丁堡大学、格拉斯哥大学、格温特大学;而伯明翰大学则专门研究惯性传感器。另外,还有许多从事传感系统开发的单位,都进行了传感反馈研究。如米德尔塞克斯工业大学致力于使机器人能组织和使用来自不同类型传感器的数据。这种机器人能“看”、“感”和“听”,它更接近于人。 2.3听觉传感
更多论文请加QQ 1634189238 492186520 第一章绪论 1.1 工业机器人的发展及分类 1.1.1 工业机器人的发展 工业机器人的发展通常可规划分为三代: 第一代工业机器人:通常是指目前国际上商品化与使用化的“可编程的工业机器人”,又称“示教再现工业机器人”,即为了让工业机器人完成某项作业,首先由操作者将完成该作业所需要的各种知识(如运动轨迹、作业条件、作业顺序和作业时间等),通过直接或间接手段,对工业机器人进行“示教”,工业机器人将这些知识记忆下来后,即可根据“再现”指令,在一定精度范围内,忠实的重复再现各种被示教的动作。1962年美国万能自动化公司的第一台Unimate工业机器人在美国通用汽车公司投入使用,标志着第一代工业机器人的诞生。 第二代工业机器人:通常是指具有某种智能(如触觉、力觉、视觉等)功能的“智能机器人”。即有传感器得到触觉、力觉和视觉等信息计算机处理后,控制机器人的操作机完成相应的适当操作。1982年美国通用汽车在装配线上为工业机器人装备了视觉系统,从而宣布了新一代智能工业机器人的问世。 第三代工业机器人:即所谓的“只治式工业机器人”。它不仅具有感知功能,而且还有一定的决策及规划能力。第一代工业机器人目前仍处在实验室研究阶段。工业机器人经历了诞生---成长---成熟期后,已成为制造业中不可缺少的核心装备,世界上有约75万台工业机器人正与工人朋友并肩战斗在个条生产线上,特种机器人作为机器人家族的后起之秀,由于其用途广泛而大有后来居上之势,仿人机器人、农业机器人、服务机器人、水下机器人、医疗机器人、军用机器人、娱乐机器人等各种用途发特种机器人纷纷面世,而且正以飞快的速度向实用化迈进。 我国的工业机器人从80年代“七五”科技攻关开始起步,在国家的支持下,通过“七五”、“八五”科技攻关,目前已基本掌握了机器人的操作机的设计制造技术、控制系统硬件和软件设计技术、运动学和轨迹规划技术、生产了部分机器人的关键元器件,开发出喷漆、焊弧、点焊、装配、搬运等机器人;其中有130多台配套喷漆机器人在二十与家企业的近30条自动喷漆生产线上获得规模应用,弧焊机器人已应用在汽车制造厂的焊装线上。 但总的来看,我国的工业机器人技术及其工程应用水平和国外比还有一定的距离,如:可靠性低于国外产品;机器人应工程起步较晚,应用领域窄,生产线系统技术与国外比有差距;在应用规模上,我国已安装的国产工业机器人约200台,约占全球已安装台数的万分之四。以上原因主要是没有形成机器人产业,当前我国的机器人生产都是应用户的要求,“一客户,一次重新设计”,品种规格多、批量小、零部件通用化程度低、供货周期长、成本也不低,而且质量、可靠性不稳定。因此迫切需要解决产业化前期的关键技术,对产品进行全面规划,搞好系列化、通用化、模化设计,积极推进产业化进程。 1.1.2 工业机器人的分类 工业机器人按不同的方法可分下述类型 工业机器人按操作机坐标形式分以下几类:(坐标形式是指操作机的手臂在运动时所取的参考坐标系的形式。)
第21卷第1期1999年1月 机器人 ROBOT V ol.21,No.1 J a n.,1999机器人控制器的现状及展望⒇ 范 永 谭 民 (中国科学院自动化研究所 北京 100080) 摘 要 机器人控制器是影响机器人性能的关键部分之一,它从一定程度上影响着机器人的发展.本文介绍了目前机器人控制器的现状,分析了它们各自的优点和不足,探讨了机器人控制器的发展方向和要着重解决的问题. 关键词 机器人控制器,开放式结构,模块化 1 引言 从世界上第一台遥控机械手的诞生至今已有50年了,在这短短的几年里,伴随着计算机、自动控制理论的发展和工业生产的需要及相关技术的进步,机器人的发展已经历了3代[1]: (1)可编程的示教再现型机器人;(2)基于传感器控制具有一定自主能力的机器人;(3)智能机器人.作为机器人的核心部分,机器人控制器是影响机器人性能的关键部分之一.它从一定程度上影响着机器人的发展.目前,由于人工智能、计算机科学、传感器技术及其它相关学科的长足进步,使得机器人的研究在高水平上进行,同时也为机器人控制器的性能提出更高的要求. 对于不同类型的机器人,如有腿的步行机器人与关节型工业机器人,控制系统的综合方法有较大差别,控制器的设计方案也不一样.本文仅讨论工业机器人控制器问题. 2 机器人控制器类型 机器人控制器是根据指令以及传感信息控制机器人完成一定的动作或作业任务的装置,它是机器人的心脏,决定了机器人性能的优劣. 从机器人控制算法的处理方式来看,可分为串行、并行两种结构类型. 2.1 串行处理结构 所谓的串行处理结构是指机器人的控制算法是由串行机来处理.对于这种类型的控制器,从计算机结构、控制方式来划分,又可分为以下几种[2]. (1)单CPU结构、集中控制方式 用一台功能较强的计算机实现全部控制功能.在早期的机器人中,如Hero-I,Robo t-I等,就采用这种结构,但控制过程中需要许多计算(如坐标变换),因此这种控制结构速度较慢. (2)二级CPU结构、主从式控制方式 一级CPU为主机,担当系统管理、机器人语言编译和人机接口功能,同时也利用它的运算能力完成坐标变换、轨迹插补,并定时地把运算结果作为关节运动的增量送到公用内存,供二级CPU读取;二级CPU完成全部关节位置数字控制.这类系统的两个C PU总线之间基本没有联系,仅通过公用内存交换数据,是一个松耦合的关系.对采用更多的CPU进一步分散 ⒇1998-09-03收稿 DOI:10.13973/https://www.doczj.com/doc/3f854546.html, k i.rob ot.1999.01.014
第1章人工智能概述课后题答案 1.1什么是智能?智能包含哪几种能力? 解:智能主要是指人类的自然智能。一般认为,智能是是一种认识客观事物和运用知识解决问题的综合能力。 智能包含感知能力,记忆与思维能力,学习和自适应能力,行为能力 1.2人类有哪几种思维方式?各有什么特点? 解:人类思维方式有形象思维、抽象思维和灵感思维 形象思维也称直感思维,是一种基于形象概念,根据感性形象认识材料,对客观对象进行处理的一种思维方式。 抽象思维也称逻辑思维,是一种基于抽象概念,根据逻辑规则对信息或知识进行处理的理性思维形式。 灵感思维也称顿悟思维,是一种显意识与潜意识相互作用的思维方式。 1.3什么是人工智能?它的研究目标是什么? 解:从能力的角度讲,人工智能是指用人工的方法在机器(计算机)上实现智能;从学科的角度看,人工智能是一门研究如何构造智能机器或智能系统,使它能模拟、延伸和扩展人类智能的学科。 研究目标: 对智能行为有效解释的理论分析; 解释人类智能; 构造具有智能的人工产品; 1.4什么是图灵实验?图灵实验说明了什么? 解:图灵实验可描述如下,该实验的参加者由一位测试主持人和两个被测试对象组成。其中,两个被测试对象中一个是人,另一个是机器。测试规则为:测试主持人和每个被测试对象分别位于彼此不能看见的房间中,相互之间只能通过计算机终端进行会话。测试开始后,由测试主持人向被测试对象提出各种具有智能性的问题,但不能询问测试者的物理特征。被测试对象在回答问题时,都应尽量使测试者相信自己是“人”,而另一位是”机器”。在这个前提下,要求测试主持人区分这两个被测试对象中哪个是人,哪个是机器。如果无论如何更换测试主持人和被测试对象的人,测试主持人总能分辨出人和机器的概率都小于50%,则认为该机器具有了智能。 1.5人工智能的发展经历了哪几个阶段? 解:孕育期,形成期,知识应用期,从学派分立走向综合,智能科学技术学科的兴起
智能机器人的基本内容诠释 导读: 智能机器人技术目前已被广泛应用于生产和生活的许多领域.按其拥有智能的水平可以分为三个层次:工业机器人、初级智能机器人、高级智能机器人。 智能拆除机器入主要适用于建筑拆除、抢险救援、水泥、冶金、核能等行业.具有无线/有线遥控操作、安全可靠、噪音小、振动低、粉尘少、无废气、工作效率高、经济实用、使用灵活等特点。智能拆除机器人是工业机器人的一种。它包含了机械设计与制造、电子电工技术、计算机原理、网络程序设计、传感器、自动控制、数字信号处理、优化设计、人工智能、机器人学等多种技术。 第一章智能机器人的基本解释 我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的“活物”。其实,这个自控“活物”的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。 我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,现在它们已经成了我们自己能够制造的东西了。 第二章智能机器人的分类 2.1综述 可分为一般机器人和智能机器人。一般机器人是指不具有智能,只具有一般编程能力和操作功能的机器人.到目前为止,在世界范围内还没有一个统一的智能机器人定义。大多数专家认为智能机器人至少要具备以下三个要素:一是感觉要素,用来认识周围环境状态;二是运动要素,对外界做出反应性动作;三是思考要素,根据感觉要素所得到的信息,思考出采用什么样的动作。 感觉要素包括能感知视觉、接近、距离等的非接触型传感器和能感知力、压觉、触觉等的接触型传感器。这些要素实质上就是相当于人的眼、鼻、耳等五官,它们的功能可以利用诸如摄像机、图像传感器、超声波传成器、激光器、导电橡胶、压电元件、气动元件、行程开关等机电元器件来实现。 对运动要素来说,智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。 智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人必备的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。
关于智能机器人路径规划的认识 樊阳阳 仪器仪表工程学号2013704008 摘要 智能机器人是人工智能的理想研究平台,是一个在感知、思维、效应方面全面模拟人的机器系统,它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术。在简要介绍智能机器人及发展状况的基础上,深入阐述了机器人在其路径规划算法的研究现状,对全局的路径规化算法作出了详细的研究,指出各种算法的优缺点,提出建立嵌入式智能机器人路径规划平台,实现了基于嵌入式实时系统的智能机器人路径规划算法。 关键词:嵌入式技术;路径规划;智能机器人
On the Understanding of the Intelligent Robot Path Planning Abstract Intelligent robot is an ideal research platform, artificial intelligence (ai) is a comprehensive simulation in terms of perception, thinking, effect of machine system, it is a comprehensive range of artificial intelligence technology, can fully inspect all areas of artificial intelligence technology. The brief introduction of intelligent robots and the development status, on the basis of deeply expounds the robot in its research status quo of path planning algorithm for global path planning algorithm made a detailed research, and points out the advantages and disadvantages of various algorithms, the proposed embedded intelligent robot path planning platform, realizes the intelligent robot path planning algorithm based on embedded real-time system. Key words:Embedded technology;Path planning;Intelligent robot
随着“机器替人”在我国的进一步推进,不仅工业机器人的增速突飞猛进,服务机器人市场也开始出现大爆发,这种爆发一方面来自于国家陆续出台的产业扶植政策,另一方面也因为资本市场的逐渐活跃。因此,不管是上市公司还是初创型企业,都将眼光转向了服务机器人领域。在此背景下,传统的物业管理领域开始了“机器替人”的进程。 近年来,中国的经济飞速增长,劳动力成本也日渐水涨船高,物业管理人员工作繁重,重复性劳动过高,人员流失率大,从业人员素质不高等问题一直困扰着物业管理行业的发展。与此同时,人们对物业服务的要求也变得越来越高,智慧社区、智慧楼宇不仅逐渐成为高档小区的“标配”,也成为了未来社区发展的“终极目标”。机器人在这个过程中发挥了其不可替代的作用。 11月22日,国际房地产顾问“五大行”之一戴德梁行在和人工智能独角兽深兰科技举行签约仪式,戴德梁行亚太区董事局主席暨大中华区行政总裁张国正表示:未来,房产、物业要做到大多数的物业服务用机器人替代。随着人工智能技术的不断进步,像安全检查、访客管理、保洁巡逻、设备检查等多项物业服务都能用智能机器人完成,不仅提升了日常工作效率,也让物业公司大量节省了成本。 笔者观察发现,目前物业机器人主要应用在三大领域,分别是出入管理及接待、自动清洁以及自动巡逻。 生物智能系统:提升出入管理效率及服务体验 不管是小区物业还是写字楼场景,出入管理往往是最耗费时间的环节。陌生人如果要拜访小区或写字楼,往往需要登记身份证并进行核实,再由物业管理人员发放门禁卡。如果碰到前台服务人员过少,或一时之间有多人需要登记的情况,往往需要花费许多时间。若此时再遇上物业服务人员需要解决住户问题,或者还在接电话的情况,这个过程需耗费的时间就更长了。而生物智能管理系统则能很好的解决这个问题。 以深兰科技的手脉设备为例,这是一款用于解决写字楼楼宇、小区物业出入口、大堂单元楼、企业前台等门禁管理系统的手脉闸机。它采用了红外线照射手掌内部毛细血管分叉结构记录,用250位数字加密,识别速度快,并且精准度极高。用户只需通过扫描身份证便可完成验证,同时加载了大数据云端架构等技术,能够实现智能门禁、全景安全监控、智慧考勤等功能。据深兰科技市场品牌部丁先生介绍,深兰的手脉识别系统不仅可用于企业前台及公司门禁管理、自动化考勤及数据表单生成、写字楼、公寓、住宅门禁管理等场景,而且可以用于刷手购物,刷手坐地铁,刷手开车门等生活的方方面面。 类似手脉设备的物业机器人主要解决了三个问题:一是大大提升了人员进出的效率,二是节省了物业公司的人力成本,三则减少了业主与物业之间的矛盾。也正是因为这种人工智能技术能够真正解决行业痛点,不管是以绿地、永旺为代表的房产企业,还是类似雅乐居这样的物业服务公司,还是戴德梁行这样的全球领先地产服务商,都已将“机器替人”提上日程。 智能清洁机器人:提升清洁效率,降低运营成本 在物业清洁领域,重视劳动力的全人工时代早已过去,不少小区或者楼宇已经过渡到了人机协作的半自动化时代。而无人驾驶技术的出现,为劳动力的彻底解放带来“希望的曙光。” 成立于2013年的高仙机器人便是一个典型的例子,这是一家从事自主移动技术研发和应用探索的机器人企业,其生产了很多种类的无人驾驶洗地机。与传统清洁手段相比,这种能够自主移动的智能清洁机器人极大地提升清洁效率。
工业机器人控制系统 的组成
工业机器人控制系统的组成 1、控制计算机:控制系统的调度指挥机构。一般为微型机、微处理器有32位、64位等如奔腾系列CPU以及其他类型CPU。 2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。 3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。 4、硬盘和软盘存储存:储机器人工作程序的外围存储器。 5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。 6、打印机接口:记录需要输出的各种信息。 7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。 8、轴控制器:完成机器人各关节位置、速度和加速度控制。 9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。 10、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。 11、网络接口 1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。 2)Fieldbus接口:支持多种流行的现场总线规格,如Devicenet、ABRemoteI/O、Interbus-s、profibus-DP、M-NET等。
工业机器人控制系统分类 1、程序控制系统:给每一个自由度施加一定规律的控制作用,机器人就可实现要求的空间轨迹。 2、自适应控制系统:当外界条件变化时,为保证所要求的品质或为了随着经验的积累而自行改善控制品质,其过程是基于操作机的状态和伺服误差的观察,再调整非线性模型的参数,一直到误差消失为止。这种系统的结构和参数能随时间和条件自动改变。 3、人工智能系统:事先无法编制运动程序,而是要求在运动过程中根据所获得的周围状态信息,实时确定控制作用。 4、点位式:要求机器人准确控制末端执行器的位姿,而与路径无关。 5、轨迹式:要求机器人按示教的轨迹和速度运动。 6、控制总线:国际标准总线控制系统。采用国际标准总线作为控制系统的控制总线,如VME、MULTI-bus、STD-bus、PC-bus。 7、自定义总线控制系统:由生产厂家自行定义使用的总线作为控制系统总线。 8、编程方式:物理设置编程系统。由操作者设置固定的限位开关,实现起动,停车的程序操作,只能用于简单的拾起和放置作业。
一、认识机器人 [教学目标] 知识目标:了解机器人的概念、特征、分类与用途,简单了解机器人的发展历程。 技能目标:熟练利用网络查找信息和处理信息。 情感目标:培养学生对机器人的兴趣,培养学生关心科技、热爱科学、勇于探索的精神。 [教学重点与难点] 教学重点:机器人的概念、特征;学生的自学能力和探索精神的培养。 难点分析:机器人的概念及其特征;学生自我评价。 [案例描述] 片断1 观看视频引入教学容 师:21世纪被信息技术专家誉为智能机器人的时代,机器人在各行各业将得到更加广泛的应用,机器人技术综合机械工程、电子工程、传感器应用、信息技术、数学、物理等多种学科,它代表着一个国家的高科技发展水平。同学们在生活中有没有接触过机器人?在影视作品中的机器人是什么样的?请同学给大家描述一下。 学生积极举手描述自己生活中、电影中见过的机器人,课堂气氛活跃,教师适时导入新课: 师:下面请同学们看一段关于智能机器人的视频。(教师播放关于机器人比赛的视频) 观看过后:同学们举了这么多机器人的例子,我们从刚才的视频上也看到机器人具有类似人类的形体和较高的智能。那么,到底什么是机器人呢?是不是只有在高科技实验室、科幻电影里面具有与人类相似的形体的才叫机器人呢? 学生开始讨论,问题初步涉及到机器人的特征方面。 师:现实生活中,机器人无处不在,并在我们的生活中起着重要的作用。你是否注意过商场的自动门、街头的取款机?这就是机器人!机器人就在我们身边!那么人们是怎么定义机器人的呢? 片断2 以任务为驱动开展教学 师:请同学们自学课本容回答以下问题 1、什么是机器人? 2、机器人有什么特征?结合机器人的特征回答为什么商场的自动门、街头的取款 机也称为机器人? 学生阅读课本容,总结归纳知识点。几分钟后,大部分学生总结出自己的答案,开始踊跃举手。 学生1:机器人是一种具有类似某些生物器官功能、用以完成特定操作和移动任务的、可通过编程来控制的机械电子装置。 学生2:机器人应该是由计算机控制的通过编排程序具有某些功能的机械。 师:从同学们的回答中可以看出机器人的外表不必像人,只要在功能上能模拟生物的动作和行为,都可以称作机器人。下面请同学们总结机器人的基本特征。 学生回答自己归纳、总结的机器人特征: 1.大脑:控制机器人的程序。 2.动作:任何机器人都有一定的动作表现。 3.身体:是一种物理状态,具有一定的形态。 师:回过头来,我们看看刚才谈到的商场自动门是不是机器人(与以上特征一一比对,得出它是机器人的结论)。 师:下面请同学们思考,你们面前的电脑是不是机器人?为什么? 教师扩展知识引出机器与机器人的区别:
第一章绪论 1 什么是人工智能?试从学科和能力两方面加以说明。 答:人工智能(学科):人工智能(学科)是计算机科学中涉及研究、设计和应用智能机器的一个分支。其近期的主要目标在于研究用机器来模仿和执行人脑的某些智力功能,并开发相关理论和技术。 人工智能(能力):人工智能(能力)是智能机器所执行的通常与人类智能有关的智能行为,如判断、推理、证明、识别、感知、理解、通信、设计、思考、规划、学习和问题求解等思维活动。 2 为什么能够用机器(计算机)模仿人的智能? 答:物理符号系统假设:任何一个系统,如果它能够表现出智能,那么它就必定能够执行上述 6 种功能。反之,任何系统如果具有这6种功能,那么它就能够表现出智能;这种智能指的是人类所具有的那种智能。 推论:既然人是一个物理符号系统,计算机也是一个物理符号系统,那么就能够用计算 机来模拟人的活动。 因此,计算机可以模拟人类的智能活动过程。 3.现在人工智能有哪些学派?它们的认知观是什么? 答:符号主义,又称为逻辑主义、心理学派或计算机学派。认为人工智能源于数理逻辑。连接主义,又称为仿生学派或生理学派。认为人工智能源于仿生学,特别是人脑模型的研究。
行为主义,又称为进化主义或控制论学派。认为人工智能源于控制论。 4.你认为应从哪些层次对认知行为进行研究? 答:应从下面4个层次对谁知行为进行研究: (1)认知生理学:研究认知行为的生理过程,主要研究人的神经系统(神经元、中枢神经系统和大脑)的活动。 (2)认知心理学:研究认知行为的心理活动,主要研究人的思维策略。 (3)认知信息学:研究人的认知行为在人体内的初级信息处理,主要研究人的认知行为如何通过初级信息自然处理,由生理活动变为心理活动及其逆过程 (4)认知工程学:研究认知行为的信息加工处理,主要研究如何通过以计算机为中心的人工信息处理系统,对人的各种认知行为(如知觉、思维、记忆、语言、学习、理解、推理、识别等)进行信息处理。 5.人工智能的主要研究和应用领域是什么? 答:问题求解,逻辑推理与定理证明,自然语言理解,自动程序设计,专家系统,机器学习,神经网络,机器人学,模式识别,机器视觉,智能控制,智能检索,智能调度与指挥,分布式人工智能与 Agent,计算智能与进化计算,数据挖掘与知识发现,人工生命。 6、人工智能的发展对人类有哪些方面的影响?试结合自己了解的情况何理解,从经济、社会何文化等方面加以说明?
Robot Robot is a type of mechantronics equipment which synthesizes the last research achievement of engine and precision engine, micro-electronics and computer, automation control and drive, sensor and message dispose and artificial intelligence and so on. With the development of economic and the demand for automation control, robot technology is developed quickly and all types of the robots products are come into being. The practicality use of robot products not only solves the problems which are difficult to operate for human being, but also advances the industrial automation program. At present, the research and development of robot involves several kinds of technology and the robot system configuration is so complex that the cost at large is high which to a certain extent limit the robot abroad use. To development economic practicality and high reliability robot system will be value to robot social application and economy development. With the rapid progress with the control economy and expanding of the modern cities, the let of sewage is increasing quickly: With the development of modern technology and the enhancement of consciousness about environment reserve, more and more people realized the importance and urgent of sewage disposal. Active bacteria method is an effective technique for sewage disposal,The lacunaris plastic is an effective basement for active bacteria adhesion for sewage disposal. The abundance requirement for lacunaris plastic makes it is a consequent for the plastic producing with automation and high productivity. Therefore, it is very necessary to design a manipulator that can automatically fulfill the plastic holding. With the analysis of the problems in the design of the plastic holding manipulator and synthesizing the robot research and development condition in recent years, a economic scheme is concluded on the basis of the analysis of mechanical configuration, transform system, drive device and control system and guided by the idea of the characteristic and complex of mechanical configuration, electronic, software and hardware. In this article, the mechanical configuration combines the character of direction coordinate and the arthrosis coordinate which can improve the stability and operation flexibility of the system. The main function of the transmission mechanism is to transmit power to implement department and complete the necessary movement. In this transmission structure, the screw transmission mechanism transmits the rotary motion into linear motion. Worm gear can give vary transmission
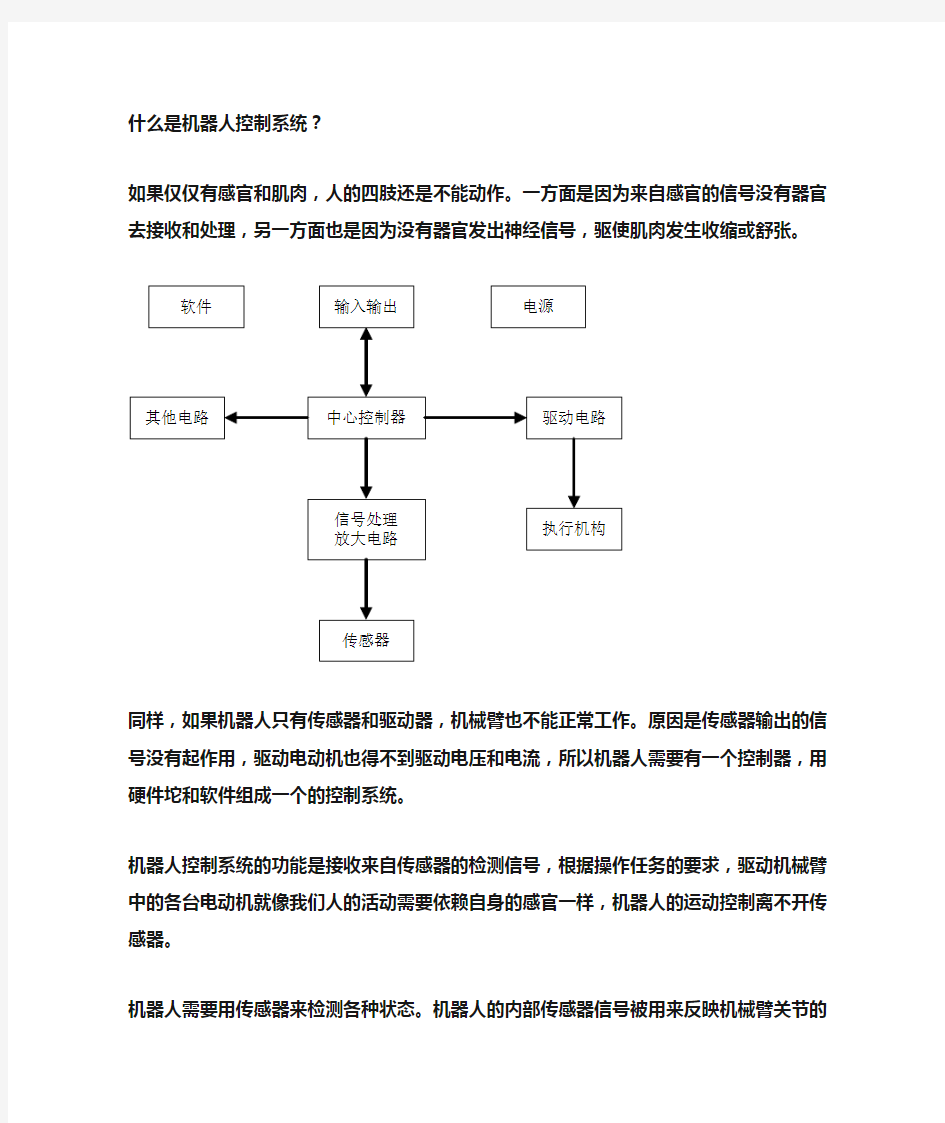
详细解析工业机器人控制系统 什么是机器人控制系统 如果仅仅有感官和肌肉,人的四肢还是不能动作。一方面是因为来自感官的信号没有器官去接收和处理,另一方面也是因为没有器官发出神经信号,驱使肌肉发生收缩或舒张。同样,如果机器人只有传感器和驱动器,机械臂也不能正常工作。原因是传感器输出的信号没有起作用,驱动电动机也得不到驱动电压和电流,所以机器人需要有一个控制器,用硬件坨和软件组成一个的控制系统。 机器人控制系统的功能是接收来自传感器的检测信号,根据操作任务的要求,驱动机械臂中的各台电动机就像我们人的活动需要依赖自身的感官一样,机器人的运动控制离不开传感器。机器人需要用传感器来检测各种状态。机器人的内部传感器信号被用来反映机械臂关节的实际运动状态,机器人的外部传感器信号被用来检测工作环境的变化。 所以机器人的神经与大脑组合起来才能成一个完整的机器人控制系统。 机器人的运动控制系统包含哪些方面? 执行机构----伺服电机或步进电机; 驱动机构----伺服或者步进驱动器; 控制机构----运动控制器,做路径和电机联动的算法运算控制; 控制方式----有固定执行动作方式的,那就编好固定参数的程序给运动控制器;如果有加视觉系统或者其他传感器的,根据传感器信号,就编好不固定参数的程序给运动控制器。 机器人控制系统的基本功能 1.控制机械臂末端执行器的运动位置(即控制末端执行器经过的点和移动路径); 2.控制机械臂的运动姿态(即控制相邻两个活动构件的相对位置); 3.控制运动速度(即控制末端执行器运动位置随时间变化的规律); 4.控制运动加速度(即控制末端执行器在运动过程中的速度变化);
人工智能是什么 人工智能(Artificial Intelligence),英文缩写为AI。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学,具有是认知、决策、反馈的过程。 该领域的研究包括深度学习、智能机器人、计算机视觉、图像识别、自然语言处理和专家系统等。未来人工智能可以对人的意识、思维的信息过程的模拟。人工智能不是人的智能,但能像人那样思考、也可能超过人的智能。
深度学习 AlphaGo是一个机器学习程序,通过深度学习方式来进行训练,击败了人类围棋世界冠军李世石、柯洁,棋力超过人类职业围棋顶尖水平。 从头开始构建自己的知识,没有人类的偏见——AlphaGo 展示了一种全新的创造方式。更具突破性的是,这种人工智能模式识别允许机器在几个小时内飞速积累起数千年的知识。 麻省理工学院使用机器学习技术,通过减少有毒化疗和放疗来治疗一种常出现在脑或脊髓中的恶性肿瘤,为患者减轻治疗中的痛苦。
智能机器人 2012年最有代表性的做手术的机器人“达·芬奇手术系统”。主刀医生坐在控制台中,控制三个机械手臂的机器人,对病人进行手术。每一个机械手臂的灵活性都远远超过人,而且带有摄像机可以进入人体内的,手术的创口非常小,能够实施一些人类一生很难完成的手术。
哈佛大学的毫米级蜘蛛机器人具有18个自由度,能够爬进人体内,破坏肿瘤或者修复受损的组织。
专家系统 国外最早将人工智能应用于智能诊断的是MYCIN专家系统。我国于上世纪70年代末研制成“关幼波肝炎医疗专家系统”和“林如高骨伤计算机诊疗系统”。通过AI数据管理和深度学习的健康管理和药物研发,基于传感器,机器视觉,图像分析和数据科学的智能诊疗,促使了现代医学的进步。如通过DeepMind算法快速诊断超过50余种眼科疾病,微软推出的由人工智能支持的心脏病风险评估API,基于Apollo Hospitals 40万人数据,考虑21种风险因素,从而帮助医生给出更全面的治疗方案。