前言
《机电系统控制基础》既是一门理论性较强、又紧密联系工程实际的实践性较强的课程,本课程的重点在于培养学生对机电系统进行建模、分析与控制的能力。难点在于如何使机电类专业的学生结合工程实际,特别是结合机械工程实际,从整体分析系统的动态行为,理解和掌握略显深奥、难懂的经典控制理论,并应用经典控制论中的基本概念和基本方法来分析、研究和解决机械工程中的实际问题。
通过实验教学环节使学生验证课堂教学的理论,使学生能够建立机电系统控制的整体概念,加深对经典控制论中基本概念和基本方法的理解,并掌握其在分析、研究和解决实际机械工程控制问题中的应用。通过三方面的实验:原理性仿真实验,面向机电系统中典型物理对象/系统的特性测试与分析实验,和典型机电系统的控制三方面实验。将所学的课程内容融会贯通,培养学生分析和解决问题的能力。
1
机电系统控制基础原理性仿真实验
1.1 实验目的
通过仿真实验,掌握在典型激励作用下典型机电控制系统的时间响应特性,分析系统开环增益、系统阻尼、系统刚度、负载、无阻尼自振频率等机电参数对响应、超调量、峰值时间、调整时间、以及稳态跟踪误差的影响;掌握系统开环传递函数的各参数辨识方法,最后,学会使用matlab软件对机电系统进行仿真,加深理解系统动态响应特性与系统各参数的关系。
1.2系统典型输入的响应实验
1.2.1 实验原理
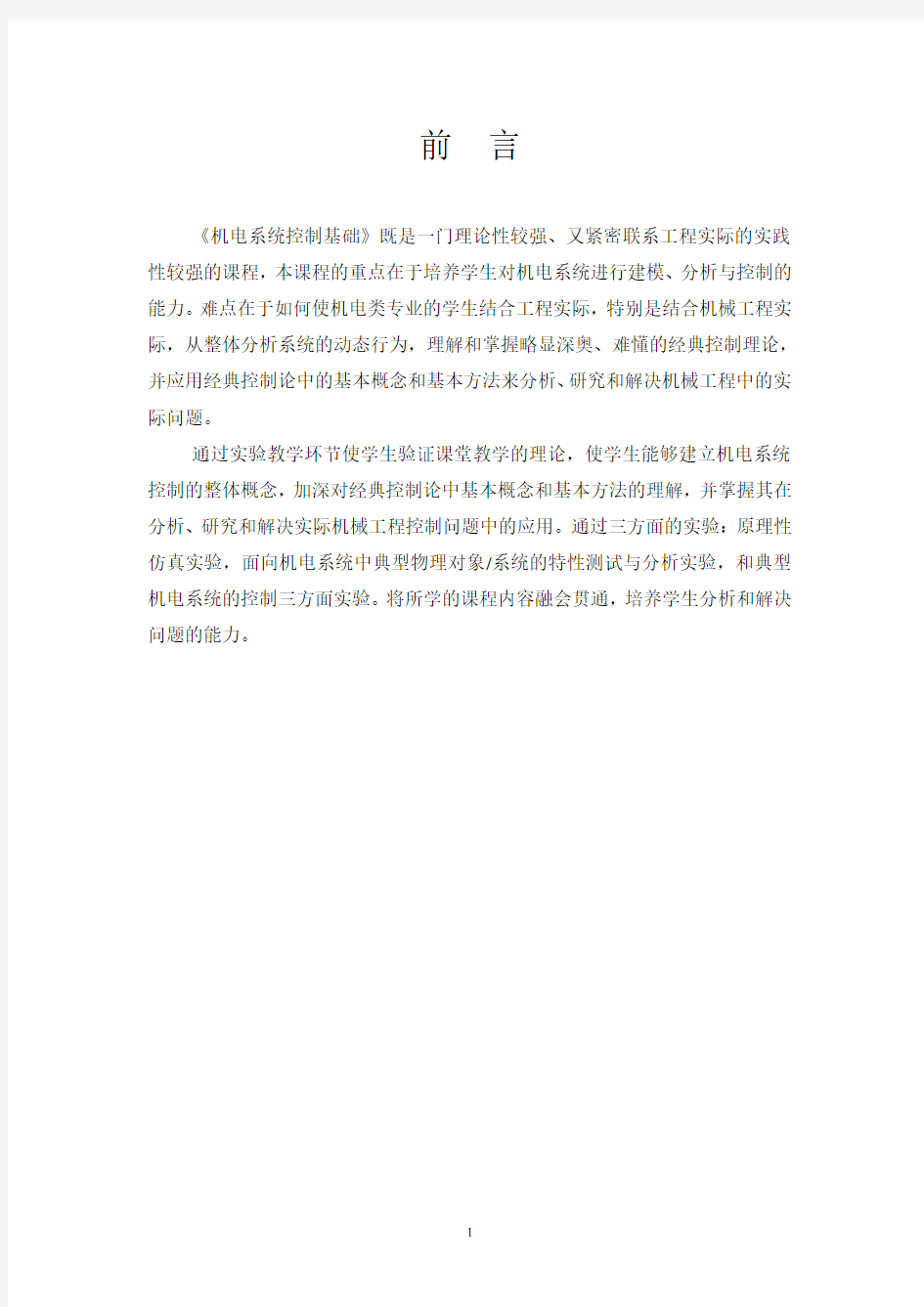
1.一阶系统的单位脉冲响应
惯性环节(一阶系统)单位脉冲响应simulink实现图,如图1-1所示
(a)可观测到输出曲线
(b)输入、输出曲线均可观测到
图1-1惯性环节(一阶系统)单位脉冲响应simulink实现图
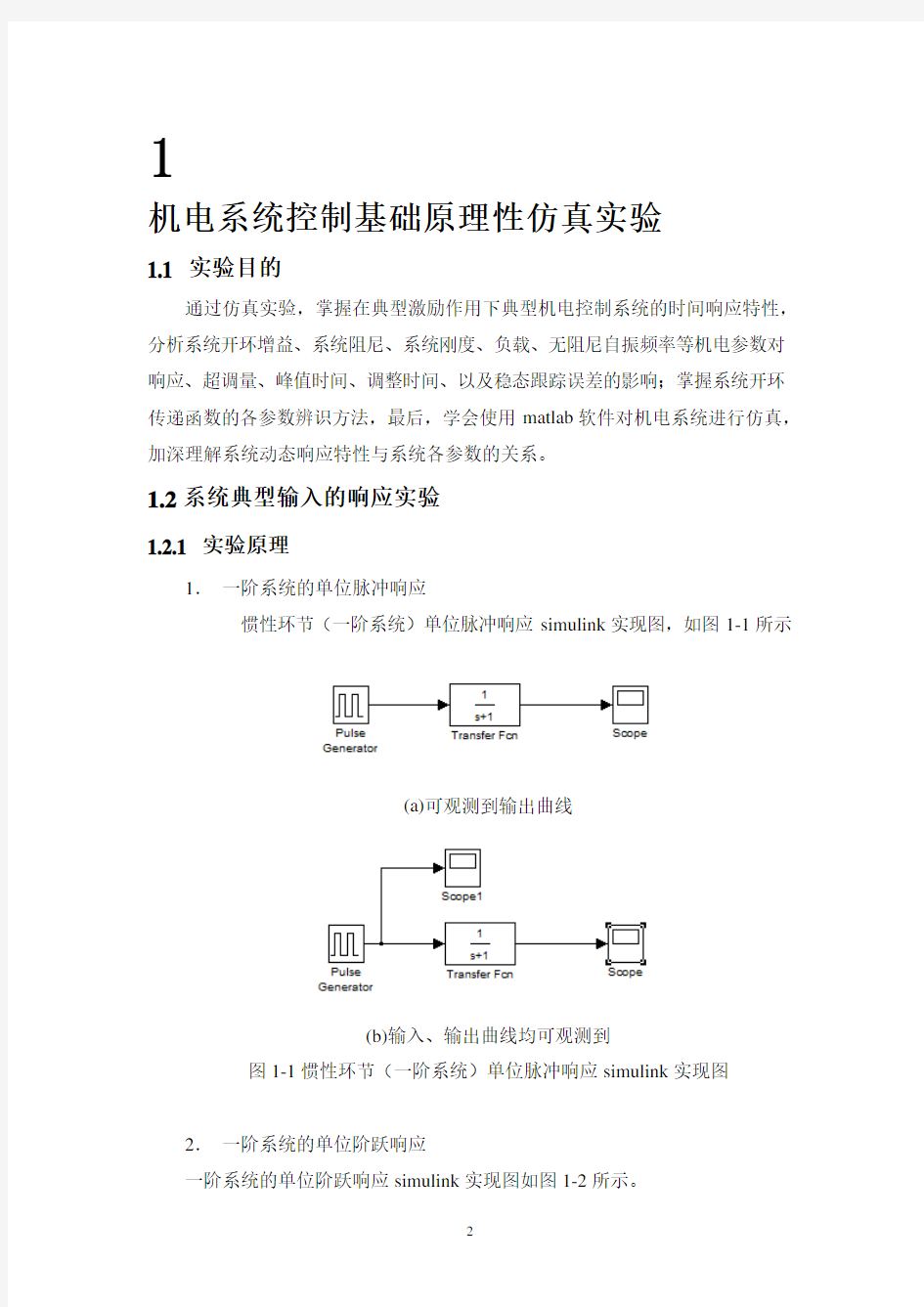
2.一阶系统的单位阶跃响应
一阶系统的单位阶跃响应simulink实现图如图1-2所示。
图1-2一阶系统的单位阶跃响应simulink实现图
3.二阶系统的单位脉冲响应
二阶系统的单位脉冲响应simulink实现图,如图1-3所示。
图1-3二阶系统的单位脉冲响应simulink实现图
4.二阶系统的单位阶跃响应
二阶系统的单位阶跃响应实验simulink实现图如图1-4所示。
图1-4二阶系统的单位阶跃响应实验simulink实现图如图1-4所示
1.2.2 实验内容
1.点击图标,进入matlab操作界面。
2.在command window中输入simulink,可以进入simulink仿真环境。
3.弹出Simulink Library Browser界面。在这个界面中,我们可以选择仿真
实验中所需要的模块。首先新建一个编辑窗口,具体操作是在左上角依
次点击“File”-“New”-“Model”。
4.根据原理图1-1,在Simulink Library Browser 窗口中选择仿真实验所需
环节并拖到Model窗口中。具体操作如下:
5.(1)单击Simulink Library Browser 窗口中的Simulink模块库中的
“Sources(信号源)”打开“Sources”模块子库,单击“Pulse Generator”
模块(阶跃信号)并按住鼠标左键将此模块拖动到untitled窗口;
6.(2)单击Simulink Library Browser 窗口中的Simulink模块库中的
“Continuous”打开“Continuous”模块子库,单击“Transfer Fcn”模块
(传递函数)并按住鼠标左键将此模块拖动到untitled窗口;
7.(3)单击Simulink Library Browser 窗口中的Simulink模块库中的
“Sinks”打开“Sinks”模块子库,单击“Scope”模块(示波器)并按
住鼠标左键将此模块拖动到untitled窗口;
8.用鼠标双击被拖到untitled窗口中的模块,都会出现属性对话框,例如
在“ser 窗口中的Simulink模块库中的“Sources(信号源)”打开“Sources”
模块子库,单击“Pulse Generator”属性对话框中可以脉冲信号的参数;
在“Transfer Fcn”的属性对话框中可以设置传递函数的阶次、时间常数、
放大系数。
9.模块连接,方法如下:
10.(1)将光标移到所要连接的初始模块的输出端(“>”),按下左键并拖
动鼠标到目标模块的输入端(“>”),松开左键即完成两个模块的连接;
11.(2)或者选中初始模块,然后按下Ctrl键并同时鼠标双击目标模块也
可进行两个模块的连接。
12.(3)若需要从某连接线上引出端子,需要按下Ctrl键并按下鼠标左键
拖动鼠标到目标模块。
13.模块连接好,并且各模块参数设定好后可进行仿真,单击工具栏中的三
角形图标,即图标,计算机开始仿真,双击示波器“Scope”可观察
仿真曲线。
14.仿真时间的设定,在untitled窗口中,将光标移到Simulation菜单,按
下鼠标左键,打开子菜单,将高亮条移到Simulation Parameters子菜单
并单击鼠标左键,出现属性对话框,可修改仿真时间。
1.2.3 实验报告要求
实验报告由四部分组成:1)实验目的;2)实验要求;3)实验原理;4)实
验结果。请同学们安要求完成。
2
角位置伺服系统频域特性测试与分析实验2.1实验目的
熟悉直流伺服电动机角位置控制系统的组成及各环节工作原理,包括:电动机参数、增量式码盘精度、机械负载惯量、信号采样频率、死区、控制方法等与角位置伺服系统控制性能指标的关系,针对该典型机电对象或系统,掌握输入信号的设置与离散方法,输出信号的采集与归一化方法,通过速度阶跃响应进行系统参数辨识,通过扫频法,测试系统的频域特性的相位特性和幅频特性曲线,分析系统的稳定性、快速性并掌握系统PID控制的离散方法,主要目的是培养学生进行基本性能实验和综合设计实验的能力。
1、掌握各环节的设计方法;
2、掌握机电系统基本调试方法;
3、通过扫频法,绘出系统的对数频率特性曲线,从实验数据曲线上,分析系统的稳定性、稳定裕度、快速性、频带宽、校正环节的形式与基本离散化方法。
2.2 实验原理
2.2.1直流电动机角位置伺服系统组成
如图2.1直流电动机角位置伺服系统,由直流减速电机、膜片联轴器、磁滞制动器、增量式空心轴码盘组成的角位置反馈闭环系统。码盘感知的角位置信号通过采集卡的I/O传给计算机,由计算机的控制模型计算输出位置信号,通过采集卡的DA、驱动电路,使直流电动机转动,组成的计算机控制的角位置伺服系统示意图如图2.2.
(a)系统采用减速电动机和磁滞制动器
(b)系统无减速电动机和磁滞制动器
(c)系统电源与驱动
图2.1直流电动机角位置伺服系统
图2.2 计算机控制的角位置伺服系统示意图
2.2.2电动机及其驱动电路
直流减速电动机采用惠城区日松菱五金电气商行的Z2D15-24GN,如图2.3,
电动机额定电压24V,额定电流1A,额定转速60rpm,额定转矩2.4Nm,减速比为50。
图2.3 直流减速电动机Z2D15-24GN
图2.4 直流电机的驱动电路板
直流减速电动机的电枢接驱动电路板,当电动机的电枢电压从 1.8v升高至7.5v时,电机转速从 4.763671875度/秒(约
0.79rpm)升高至243.28125度/秒(约40.5rpm),而且呈线性关系
y x
=?,式中x为给定电压(伏),y为电机正转转速(度
42.797*77.48
/秒),死区电压0 1.81
~伏,线性相关系数为1,用码盘测得电动机正转转速与电枢电压的关系如图2.5。
图2.5直流减速电动机正转转速与电枢电压的关系直流电动机的电枢接驱动电路板,当电动机的电枢电压从0.7v 减小至-4.7v时,电机转速从12.19921875度/秒(约2rpm)升高至244.9863281度/秒(约40.1rpm),而且呈线性关系=?,式中x为给定电压(伏),y为电机反转转速
42.436*45.277
y x
(度/秒),死区电压0 1.067
~伏,线性相关系数为1,用码盘测得电动机反转转速与电枢电压的关系如图2.6。
图2.6 直流减速电动机反转转速与电枢电压的关系
2.2.3 增量式空心轴码盘
角度测量传感器采用长春衡伟光电有限公司生产的增量式空心轴码盘HZ38H8-2048DM-D05E,如图2.7,脉冲数2048p/R,电源电压5V或10-30V,最大转速6000rpm,空心轴径6mm,轴允许径向负荷20N,轴允许轴向负荷10N,输出方波信号。增量式空心轴码盘接线如表1。联轴器如图2.8所示。
图2.7 增量式空心轴码盘照片图2.8 联轴器图片
表1增量式空心轴码盘接线
码盘输出的A、B两路相位差90°的两路脉冲,电机带动码盘的旋转,当旋转的方向不同时,相互间超前滞后关系也会发生变化, 从而区分出正转和反转两路计数冲。其方向判别电路和方向如图2.9,判别电路波形如图2.10,码盘判向电路实物如图2.11。
图2.9判别电路原理
(a)正转波形 (b)反转波形 图2.10 码盘方向判别电路原理和波形图
图2.11 USB 接口码盘判向/计数电路实物照片
如图2.10(a),电机正转时,A 相超前B 相90°,A 相从低电平向高电平跳变,A 相经过整形、反向后接入与非门2的一个输入,与非门2的另一个输入为A 相经过R 1C 1放电过程才能由高电平变为低电平,所以在与非门2的输出端c 得到一个113T R C =的负脉冲,然后c 和B 相或得到CP+,即码盘正转的计数脉冲。
如图2.10(b),电机反转时,A 相滞后B 相90°,A 相从高电平向低电平跳变,A 相经过整形、反向后接入与非门1的一个输入,与非门1的另一个输入需要经过R 2C 2放电过程才能由高电平变为低电平,所以在与非门1的输出端d 得到一个223T R C =的负脉冲,然后d 和B 相或得到CP-,即码盘反转的计数脉冲。
2.2.4输入信号
实验采用扫频方法获得实验系统的幅频特性和相频特性,系统输入为电机电枢电压0cos V V t ω=,式中,ω为输入信号的角频率,由图2.5和图2.6知,电动机转速与电枢控制电压成线性关系,故其对应的电机的角速度余弦,如图2.12(a),电机的角位置正弦0sin A A t ω=,如图2.12(b)。
(a) 输入角速度 (b)输入角位置
图2.12 输入信号形式
如图2.13(a )为控制系统主界面,点击“输入信号设置”进入输入信号设置界面,如图2.13(b ),进行输入信号设置,设置输入余弦电枢电压的幅值和频率(系统默认幅值为6V ,默认频率为0.1Hz ),输入结束后,点击“确定”返回系统主界面。
(a )系统主界面
(b)系统输入界面
图 2.13 系统界面
V推荐范围为考虑正反转死区电压以及转速和电压的线性度,电压幅值
2.5V~6V,余弦电枢电压的频率ω推荐范围为0.112
Hz Hz
~,其中输入的余弦电枢电压每个周期被离散为100个点,点击“启动”,生成c:\testdata\ inputfile (*Hz-*V).txt文件,文件中共保存2个周期的离散点,共200个数据点,第一列为离散点时刻,第二列为离散后该时刻的电压值。5Hz6V输入数
据如图2.14
图2.14 5Hz6V输入数据图2.15 5Hz6V输出数据
2.2.5参数设置
当完成输入信号设置,即电动机余弦电枢电压的幅值和频率设置,需要在系统主界面进行电机角位置采样周期的设置(系统默认为1ms),其中采样周期的选择,必须满足采样定理。参数设置完成后,点击“启动”,电机角度自动由码盘采集,并生成数据文件c:\testdata\outputdata(*Hz-*V).txt,点击“暂停”,数据记录结束。
2.2.6输出信号
对于线性系统,系统输入正弦信号,输出一定是正弦信号,输入/输出如图
2.16。
(a) 输入电压信号 (b) 输出信号(c ωω<) (c) 输出信号(c ωω>)
(d )有零漂的实际角位置输出 (e )无零漂的实际角位置输出
图2.16
输入/输出信号形式
如图 2.16(b),当输入位置信号角频率c ωω<时(c ω为穿越零分贝线的角频率,即开环剪切频率),输出位置正弦信号的幅值010B V >,即在对数幅频特性曲线零分贝线之上;反之,如图2.16(c),当输入位置正弦角频率c ωω>时,输出位
置正弦信号的幅值020B V <,即在对数幅频特性曲线零分贝线之下。同理可知,
当输入位置正弦角频率
c ωω=时,输出位置正弦信号的幅值等于输入信号幅值。
值得注意的是,无论输入位置正弦角频率ω是多少,输出信号相对输入信号都存在时间的滞后0201t t t Δ=?,对应的滞后相角360o t γω=Δ××。
针对图2.1所示角位置伺服系统,输出角位置信号由码盘直接检测,输出曲线如图2.16(d )和(e ),分别为输出信号曲线发生零点漂移和无零点漂移两种情况。根据在如图2.13(a )控制系统主界面中输入的采样周期,并且自动生成c:\testdata\inputdata(*Hz-*V).txt 文件,文件的第一列为采样时刻,第二列为在该采样时刻由码盘检测得到的角度值。
2.2.7数据处理
在每个频率和输入电枢电压下得到一组输入和输出文件
inputdata.txt,outputdata.txt ,将数据文件分别保存。系统界面如图2.13(a),单击“启动/暂停”,数据记录结束,保存为输出文件outputdata.txt ,第一列为离散点时刻(秒),第二列为离散后该时刻的角度。5Hz6V 输入数据如图2.15。
不同频率ω的输入电枢电压幅值V 0和输出角位置幅值B 关系可以列入表2.1,其中推荐使用信号频率ω值范围为0.112Hz Hz ~,根据实测数据画出0
20lg B
V 与ω的曲线,即为对数特性曲线中的幅频特性曲线。
输出信号的滞后时间02t 根据码盘读出,输出信号相对于输入信号-的时间滞后为011t t t Δ=?秒或者021t t t Δ=?,输出信号相对于输入信号滞后的角度为
0()360o t γω=Δ××,其中不同频率的输出信号滞后输入信号的角度和频率的关系
可列入表2.2,画出γ与ω的曲线,即为对数特性曲线中的相频特性曲线。
表2.1 不同频率的输入和输出信号幅值关系
表2.2 不同频率的输入和输出信号相位差频率(Hz)
γ(度)
频率(Hz)
γ(度)
17
2.3 实验内容
1. 绘制同一频率输入/输出信号的时域曲线
根据获得的数据文件inputdata.txt 和outputdata.txt ,绘制某一频率下的输入/输出信号的时域曲线,观察输入/输出信号的不同和相同之处。
2. 绘出系统幅频特性曲线
根据在表2.1中获得实验数据,绘出系统幅频特性曲线,并用折线作为渐近线逼近幅频特性曲线。
3. 实测系统开环剪切频率
4. 在幅频特性曲线中,穿越零分贝线的频率即为开环剪切频率c ω。
5. 绘出系统相频特性曲线
根据在表2.2中获得的γ与ω,绘出系统已知频率点的相角,获得相频特性曲线。观察10o
?和50o
?对应的频率值。
6. 实测系统传递函数
7. 根据在实验内容2中得到的幅频特性曲线,确定系统频率特性的形式;
其中,由幅频特性低频段确定系统的开环增益K ;由测得各转角频率确定各惯性环节的时间常数,最后,给出系统的传递函数。
2.4实验报告要求
1. 绘制同一频率输入/输出信号的时域曲线;
2. 绘出系统已知频率点的幅值和相角,并用折线作为渐近线逼近幅频特性
曲线,给出开环剪切频率
c ω;
3. 给出系统的开环增益K 和系统开环传递函数,各惯性环节的时间常数。
4. 给出控制系统的simulink 实现图,通过改变开环增益K ,用示波器观察
系统输出。
2.5思考题
1.电动机选择的依据是什么?
2.系统输入余弦电枢电压的幅值和系统参数辨识精度是否有关?为什
么?
3.采样频率的高低对系统参数辨识精度有何影响?
4.分析输出信号的时域曲线零点漂移的原因;
5.分析电机转速和电枢电压之间产生死区的原因?死区如何影响系统的
控制性能?在运动控制中如何减小死区的影响?
6.分析电机的正反转转速与电压的线性系数不同的原因以及如何提高系
统辨识精度?
7.满足相角滞后10o时的频带宽是多少?满足幅值衰减10%的频带宽是多
少?同时满足相角滞后10o和幅值衰减10%的频带宽是多少?
8.在绘制对数频率特性图时,为什么将余弦电枢电压幅值作为输入信号,
将由码盘检测的角位置信号作为输出信号?并分析输入信号为角位置
信号时,对数频率特性的变化。如何计算输入角位置信号的大小?
9.简述本实验涵盖的基本知识点,以及你建议可扩展实验内容。
“计算机组成原理” 实验指导书 伟丰编写 2014年12月
实验一算术逻辑运算实验 一、实验目的 1、掌握简单运算器的组成以及数据传送通路。 2、验证运算功能发生器(74LS181)的组合功能。 二、实验容 运用算术逻辑运算器进行算术运算和逻辑运算。 三、实验仪器 1、ZY15Comp12BB计算机组成原理教学实验箱一台 2、排线若干 四、实验原理 实验中所用的运算器数据通路如图1-1所示。其中运算器由两片74LS181以并/串形式构成8位字长的ALU。运算器的两个数据输入端分别由两个锁存器(74LS273)锁存,锁存器的输入连至数据总线,数据输入开关(INPUT)用来给出参与运算的数据,并经过一三态门(74LS245)和数据总线相连。运算器的输出经过一个三态门(74LS245)和数据总线相连。数据显示灯已和数据总线(“DATA BUS”)相连,用来显示数据总线容。
图1-l 运算器数据通路图 图1-2中已将实验需要连接的控制信号用箭头标明(其他实验相同,不再说明)。其中除T4为脉冲信号,其它均为电平控制信号。实验电路中的控制时序信号均已部连至相应时序信号引出端,进行实验时,还需将S3、S2、S1、S0、Cn、M、LDDR1、LDDR2、ALU_G、SW_G 各电平控制信号与“SWITCH”单元中的二进制数据开关进行跳线连接,其中ALU_G、SW_G 为低电平有效,LDDR1、LDDR2为高电平有效。按动微动开关PULSE,即可获得实验所需的单脉冲。 五、实验步骤 l、按图1-2连接实验线路,仔细检查无误后,接通电源。(图中箭头表示需要接线的地方, 2、用INPUT UNIT的二进制数据开关向寄存器DR1和DR2置数,数据开关的容可以用与开关对应的指示灯来观察,灯亮表示开关量为“1”,灯灭表示开关量为“0”。以向DR1中置入11000001(C1H)和向DR2中置入01000011(43H)为例,具体操作步骤如下:首先使各个控制电平的初始状态为:CLR=1,LDDR1=0,LDDR2=0,ALU_G=1,SW_G=1,S3 S2 S1 S0 M CN=111111,并将CONTROL UNIT的开关SP05打在“NORM”状态,然后按下图所示步骤进行。
《机电控制技术》 课程大作业一 基于MATLAB的直流电机双闭环调速系统的设计与仿真 学院:机电工程学院 专业:机械设计制造及其自动化 班级:1108110 学号:1110811005 姓名:崔晓蒙 2013-06-17
设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定电压48V ; 额定电流4A ; 额定转速n=500r/min ; 电枢回路总电阻R=0.8Ω;(本次选为8Ω) 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* * im nm U U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。 试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%; 空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。
1.计算电流和转速反馈系数 电流反馈系数:) (A V I U nom im /25.14210 *=?==λβ 转速反馈系数:)/min (02.0500 10 *r V n U nom nm ===α 2.电流环的动态校正过程和设计结果 2.1确定时间常数 由题给电流反馈滤波时间常数s ms T oi 0002.02.0==, 调制周期s f T s 0001.010 1 14=== , 按电流环小时间常数的近似处理方法,有 s T T T oi s i 0003.00002.00001.0=+=+=∑ 2.2选择电流调节器结构 电流环可按Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s G i i i ACR ττ1 )(+= 2.3选择调节器参数 超前时间常数:s T l i 008.0==τ。 电流超调量由题给为%5≤i σ,电流环开环增益:取5.0=∑i I T K ,因此 6667.16660003 .05 .05.0=== ∑i I T K 于是,电流调节器的比例系数为 .7778718 .425.18 008.06667.1666=???==s i I i K R K K βτ 2.4检验近似条件 电流环的截止频率1/s 6667.1666==I ci K ω。 1)近似条件一:s ci T 31≤ ω
第3章习题课答案 3-1 设单位反馈系统的开环传递函数为4 ()(s 5) G s s =+,试求该系统的单位阶跃响应和单位脉冲响应。 解:系统闭环传递函数为 24 (s)44(s 5) 4(s)54(s 1)(s 4) 1(s 5) o i X s X s s s +===++++++ (1)当()1()i x t t =时,1()i X s s = 41 ()411 33()()()(4)(1)14 o o i i X s X s X s X s s s s s s s ===-+++++g 则 441()1()1()1()33 t t o x t t e t e t --=-?+? (2)当()()i x t t δ=时,()1i X s = 44(s)4 33(s)(s)1(s)(s 4)(s 1)14 o o i i X X X X s s ==?=-++++ 则 44()()1()3 t t o x t e e t --= -? 3-2 系统结构图如图3-70所示。已知系统单位阶跃响应的超调量σ%3.16=%,峰值时间1=p t s 。 (1)求系统的开环传递函数)(s G ; (2)求系统的闭环传递函数)(s Φ; (3)根据已知的性能指标σ%、p t 确定系统参数K 及τ; (4)计算等速输入s t t r )(5.1)(?=时系统的稳态误差。 解 (1) )110(10) 1(101)1(10 )(++=++ +=ττs s K s s s s s K s G
(2) 2 2 22210)110(10)(1)()(n n n s s K s s K s G s G s ωξωωτ++=+++=+=Φ (3)由 ?? ???=-===--113.16212ξωπσ?ξπn p o o o o t e 联立解出 ?????===263.063.35.0τωξn 由(2) 18.1363.31022 ===n K ω,得出 318.1=K 。 (4) 63.31263.01018 .1311010)(lim 0=+?=+= =→τK s sG K s v 413.063 .35 .1===v ss K A e 3-3 设图(a )所示系统的单位阶跃响应如图(b )所示。试确定系统参数,1K 2K 和a 。 解 由系统阶跃响应曲线有 ??? ??=-===∞o o o o p t h 3.333)34(1.03)(σ 系统闭环传递函数为 2 2 2 2122 12)(n n n s s K K as s K K s ωξωω++=++=Φ (1) 由 ????? ===-=--o o o o n p e t 3.331.012 12 ξξπσωξπ 联立求解得 ?? ?==28.3333.0n ωξ 由式(1)???====22 21108 2 1n n a K ξωω 另外 3lim 1 )(lim )(21 22100 ==++=? Φ=∞→→K K as s K K s s s h s s 5.21 )(lim )(0 =? Φ=∞→s s s h s
姓名:学号: 课程名称:机电系统控制基础实验 实验序号: 1 实验日期: 实验室名称: 同组人: 实验成绩:总成绩: 教师评语: 教师签字: 年月日
机电系统控制基础原理性仿真实验 一、实验目的 通过仿真实验,掌握在典型激励作用下典型机电控制系统的时间响应特性,分析系统开环增益、系统阻尼、系统刚度、负载、无阻尼自振频率等机电参数对响应、超调量、峰值时间、调整时间、以及稳态跟踪误差的影响;掌握系统开环传递函数的各参数辨识方法,最后,学会使用matlab 软件对机电系统进行仿真,加深理解系统动态响应特性与系统各参数的关系。 二、实验原理 1.一阶系统的单位脉冲响应 惯性环节(一阶系统)单位脉冲响应simulink 实现图,如图2-1 所示 (a)可观测到输出曲线 (b)输入、输出曲线均可观测到 图2-1 惯性环节(一阶系统)单位脉冲响应simulink 实现图 2.一阶系统的单位阶跃响应 一阶系统的单位阶跃响应simulink 实现图如图2-2 所示。 图2-2 一阶系统的单位阶跃响应simulink 实现图 3.二阶系统的单位脉冲响应 二阶系统的单位脉冲响应simulink 实现图,如图2-3 所示。 图2-3 二阶系统的单位脉冲响应simulink 实现图
4.二阶系统的单位阶跃响应 二阶系统的单位阶跃响应实验simulink 实现图如图2-4 所示。 图2-4 二阶系统的单位阶跃响应实验simulink 实现图 三、实验要求 1. 掌握在典型激励作用下典型机电控制系统的时间响应特性。 2. 掌握系统开环传递函数的各参数辨识方法。 3. 使用matlab 软件对机电系统进行仿真 四、实验结果 1. 一阶系统的单位脉冲响应 Simulink 模型图如图4-1 图4-1 一阶系统单位脉冲响应模型图 单位脉冲函数波形图如图4-2 图4-2 单位脉冲函数波形图
自动控制原理 大作业 (设计任务书) 姓名: 院系: 班级: 学号: 5. 参考图5 所示的系统。试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60
度,幅值裕度不小于8 分贝。利用MATLAB 画出 已校正系统的单位阶跃和单位斜坡响应曲线。 + 一.人工设计过程 1.计算数据确定校正装置传递函数 为满足设计要求,这里将超前滞后装置的形式选为 ) 1)(() 1)(1()(2 12 1T s T s T s T s K s G c c ββ++++= 于是,校正后系统的开环传递函数为)()(s G s G c 。这样就有 )5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205 ==c K 所以 100=c K 这里我们令100=K ,1=c K ,则为校正系统开环传函) 5)(1(100 )(++= s s s s G
首先绘制未校正系统的Bode 图 由图1可知,增益已调整但尚校正的系统的相角裕度为? 23.6504-,这表明系统是不稳定的。超前滞后校正装置设计的下一步是选择一个新的增益穿越频率。由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s ,将新的增益穿越频率仍选为2rad/s ,但要求2=ωrad/s 处的超前相角为? 60。单个超前滞后装置能够轻易提供这一超前角。 一旦选定增益频率为2rad/s ,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。要获得另一个转角频率)/(12T βω=,需要知道β的数值, 对于超前校正,最大的超前相角m φ由下式确定 1 1 sin +-= ββφm 因此选)79.64(20 ==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为 )/(12T βω=就是01.0=ω,于是,超前滞后校正装置的相角滞后部分的传函为 1 1001 520 01.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。因此,如果超前滞后校正装置在2=ωrad/s 处提供-10dB 的增益,新的增益穿越频率就是所期望的增益穿越频率。从这一要求出发,可 以画一条斜率为-20dB 且穿过(2rad/s ,-10dB )的直线。这条直线与0dB 和-26dB 线的交点就确定了转角频率。因此,超前部分的转角频率被确定为s rad s rad /10/5.021==ωω和。 因此,超前校正装置的超前部分传函为 )1 1.01 2(201105.0++=++s s s s 综合校正装置的超前与之后部分的传函,可以得到校正装置的传递函数)(S G c 。 即) 1100)(11.0() 15)(12(01.02.0105.0)(++++=++++= s s s s s s s s s G c 校正后系统的开环传递函数为
计算机组成原理实验指导书 (虚拟实验系统)
实验1 1位全加器 ?实验目的 ?掌握全加器的原理及其设计方法。 ?熟悉组成原理虚拟教学平台的使用。 ?实验设备 与非门(3片)、异或门(2片)、开关若干、指示灯若干 ?实验原理 1位二进制加法器单元有三个输入量:两个二进制数Ai,Bi和低位传来的进位信号Ci,两个输出量:本位和输出Si以及向高位的进位输出C(i+1),这种考虑了全部三个输入量的加法单元称为全加器。来实验要求利用基本门搭建一个全加器,并完成全加器真值表。 ?实验步骤 各门电路芯片引脚显示于组件信息栏。 1. 测从组件信息栏中添加所需组件到实验流程面板中,按照图1.1所示搭建实验。 图1.1 组合逻辑电路实验流程图
2. 打开电源开关,按表1设置开关的值,完成表1-1。 表1-1 实验2 算术逻辑运算实验 ?实验目的 ?了解运算器的组成结构 ?掌握运算器的工作原理 ?掌握简单运算器的组成以及数据传送通路 ?验证运算功能发生器(74LS181)的组合功能 ?实验设备 74LS181(2片),74LS273(2片), 74LS245(2片),开关若干,灯泡若干,单脉冲一片 ?实验原理 实验中所用的运算器数据通路图如图2.1所示,实验中的运算器由两片74LS181以并/串形式构成8位字长的ALU。运算器的输出经过一个三态门(74LS245)和数据总线相连,运算器的两个数据输入端分别由两个锁存器(74LS373)锁存,锁存器的输入连至数据总线,数据开关用来给出参与运算的数据(A和B),并经过一个三态门(74LS245)和数据显示灯相连,显示结果。 ?74LS181:完成加法运算 ?74LS273:输入端接数据开关,输出端181。在收到上升沿的时钟信号前181和其 输出数据线之间是隔断的。在收到上升沿信号后,其将输出端的数据将传到181, 同时,作为触发器,其也将输入的数据进行保存。因此,通过增加该芯片,可以通 过顺序输入时钟信号,将不同寄存器中的数据通过同一组输出数据线传输到181 芯片的不同引脚之中 ?74LS245:相当于181的输出和数据显示灯泡组件之间的一个开关,在开始实验后
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称: 机械原理 设计题目: 凸轮机构设计 一.设计题目 设计直动从动件盘形凸轮机构, 1.运动规律(等加速等减速运动) 推程 0450≤≤? 推程 009045≤≤? 2.运动规律(等加速等减速运动) 回程 00200160≤≤? 回程 00240200≤≤? 三.推杆位移、速度、加速度线图及凸轮s d ds -φ 线图 采用VB 编程,其源程序及图像如下: 1.位移: Private Sub Command1_Click() Timer1.Enabled = True '开启计时器 End Sub Private Sub Timer1_Timer() Static i As Single
Dim s As Single, q As Single 'i作为静态变量,控制流程;s代表位移;q代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = i s = 240 * (q / 90) ^ 2 Picture1.PSet Step(q, -s), vbRed ElseIf i >= 45 And i <= 90 Then q = i s = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2) Picture1.PSet Step(q, -s), vbGreen ElseIf i >= 90 And i <= 150 Then q = i s = 120 Picture1.PSet Step(q, -s), vbBlack ElseIf i >= 150 And i <= 190 Then q = i s = 120 - 240 * (q - 150) ^ 2 / 6400 Picture1.PSet Step(q, -s), vbBlue ElseIf i >= 190 And i <= 230 Then
哈工大机械制造大作业
一、零件分析 题目所给的零件是CA6140车床的拨叉。它位于车床变速机构中,主要起换档,使主轴回转运动按照操作者的要求工作,获得所需的速度和扭矩的作用。零件上方的孔与操纵机构相连,二下方的Φ55叉口则是用于与所控制齿轮所在的轴接触,拨动下方的齿轮变速。 其生产纲领为批量生产,且为中批生产。
图1-1 CA6140拨叉零件图 二、零件的工艺分析 零件材料采用HT200,加工性能一般,在铸造毛坯完成后,需进行机械加工,以下是拨叉需要加工的表面以及加工表面之间的位置要求:
1、小头孔Φ25:该加工面为内圆面,其尺寸精度要求为; 2、叉口半圆孔Φ55:该加工面为内圆面,其尺寸精度要求为; 3、拨叉左端面:该加工面为平面,其表面粗糙度要求为,位置精度要求与内圆面圆心距离为; 4、叉口半圆孔两端面,表面粗糙度要求为,其垂直度与小头孔中心线的垂直度为; 5、拨叉左端槽口,其槽口两侧面内表面为平面,表面粗糙度要求为,其垂直度与小头孔中心线的垂直度为0.08mm。 6、孔圆柱外端铣削平面,加工表面是一个平面,其表面粗糙度要求为。 三、确定毛坯
1、确定毛坯种类: 零件材料为,查阅机械制造手册,有,考虑零件在机床运行过程中受冲击不大,零件结构又比较简单,故选择铸造毛坯。 图3-1 毛坯模型 2、毛坯特点: (1)性能特点: (2)结构特点:一般多设计为均匀壁厚,对于厚大断面件可采用空心结构。CA6140拨叉厚度较均匀,出现疏松和缩孔的概率低。 (3)铸造工艺参数: 铸件尺寸公差:铸件公称尺寸的两个允许极限尺寸之差成为铸件尺寸公差。成批和大量生产
计算机组成原理上机实验指导
一、实验准备和实验注意事项 1.本课程实验使用专门的TDN-CM++计算机组成原理教学实验设备,使用前后均应仔细检查主机板,防止导线、元件等物品落入装置内导致线路短路、元件损坏。 2.完成本实验的方法是先找到实验板上相应的丝印字及其对应的引出排针,将排针用电缆线连接起来,连接时要注意电缆线的方向,不能反向连接;如果实验装置中引出排针上已表明两针相连,表明两根引出线内部已经连接起来,此时可以只使用一根线连接。 3.为了弄清计算机各部件的工作原理,前面几个实验的控制信号由开关单元“SWITCH UNIT”模拟输入;只有在模型机实验中才真正由控制器对指令译码产生控制信号。在每个实验开始时需将所有的开关置为初始状态“1”。 4.本实验装置的发光二极管的指示灯亮时表示信号为“0”,灯灭时表示信号为“1”。 5.实验接线图中带有圆圈的连线为实验中要接的线。 6.电源关闭后,不能立即重新开启,关闭与重启之间至少应有30秒间隔。 7.电源线应放置在机内专用线盒中。 8.保证设备的整洁。
二、实验设备的数据通路结构 利用本实验装置构造的模型机的数据通路结构框图如下图。其中各单元内部已经连接好,单元之间可能已经连接好,其它一些单元之间的连线需要根据实验目的用排线连接。 图0-2 模型机数据通路结构框图
实验一运算器实验:算术逻辑运算实验 一.实验目的 1.了解运算器的组成结构; 2.掌握运算器的工作原理; 3.掌握简单运算器的数据传送通路。 4.验证运算功能发生器(74LSl81)的组合功能。 二.实验设备 TDN-CM++计算机组成原理教学实验系统一台,排线若干。 三.实验原理 实验中所用的运算器数据通路如图1-l所示。其中两片74LSl81以串行方式构成8位字长的ALU,ALU的输出经过一个三态门(74LS245)和数据总线相连。三态门由ALU-B控制,控制运算器运算的结果能否送往总线,低电平有效。 为实现双操作数的运算,ALU的两个数据输入端分别由二个锁存器DR1、DR2(由74LS273实现)锁存数据。要将数据总线上的数据锁存到DR1、DR2中,锁存器的控制端LDDR1和LDDR2必须为高电平,同时由T4脉冲到来。 数据开关(“INPUT DEVICE”)用来给出参与运算的数据,经过三态门(74LS245)后送入数据总线,三态门由SW-B控制,低电平有效。数据显示灯(“BUS UNIT”)已和数据总线相连,用来显示数据总线上的内容。 图中已将用户需要连接的控制信号用圆圈标明(其他实验相同,不再说明),其中除T4为脉冲信号外,其它均为电平信号。由于实验电路中的时序信号均已连至“W/R UNIT”的相应时序信号引出端,因此,在进行实验时,只需将“W/R UNIT”的T4接至“STATE UNIT”的微动开关KK2的输出端,按动微动开关,即可获得实验所需的单脉冲。 ALU运算所需的电平控制信号S3、S2、S1、S0、Cn、M、LDDR1、LDDR2、ALU-B、SW-B均由“SWITCH UNIT”中的二进制数据开关来模拟,其中Cn、ALU-B、SW-B为低电平有效,LDDRl、LDDR2为高电平有效。 对单总线数据通路,需要分时共享总线,每一时刻只能由一组数据送往总线。
3-1 题图3-1所示的阻容网络中,i ()[1()1(30)](V)u t t t =--。当t =4s 时,输出o () u t 值为多 少?当t 为30s 时,输出u o (t )又约为多少? 解:661(s)111 1(s)1110410141o i U sC U RCs s R sC -====+???+++ (4)0.632(V)o u ≈,(30)1(V) o u ≈ 3-2 某系统传递函数为21 ()56 s s s s +Φ= ++,试求其单位脉冲响应函数。 解: 2(s)112 (s)5623 o i X s X s s s s +-==+++++ 其单位脉冲响应函数为 23(t)(e 2e )1() t t x t δ--=-+? 3-3 某网络如图3-3所示,当t ≤0-时,开关与触点1接触;当t ≥0+时,开关与触点2接触。 试求输出响应表达式,并画出输出响应曲线。 1V 题图3-1 题图3-3 解: 1(s)1 1(s)2121()o i R U RCs s sC U RCs s R R sC + +===++++ 01(t)1(2)1()(V)i i i u u u t =+=+-? 1111212 (s)(s)121212 o i s s U U s s s s s ++-= ==-+++ 则
2 1(t)(e 2)1()(V) t o u t - =-? 12 01(t)1(e 2)1()(V) o o o u u u t -=+=+-? 其输出响应曲线如图3-3所示 图3-3 题图3-4 3-4 题图3-4所示系统中,若忽略小的时间常数,可认为 1d 0.5()d y B s x -=?。其中,ΔB 为阀芯位移,单位为cm ,令a =b (ΔB 在堵死油路时为零)。 (1) 试画出系统函数方块图,并求(s)(s) Y X 。 (2) 当i ()[0.51()0.51(4)1(40)]cm x t t t s t s =?+?---时,试求t =0s,4s,8s,40s,400s 时的y (t )值,()B ?∞为多少? (3) 试画出x (t )和y (t )的波形。 解:(1)依题意可画出如图3-4所示的系统函数方块图, 图3-4-1 则
计算机组成原理 实验报告 学号: 姓名: 提交日期: 成绩: 计算机组成原理实验报告 Computer Organization Lab Reports ______________________________________________________________________________ 班级: ____ 姓名:____学号:_____ 实验日期:____
一.实验目的 1. 熟悉Dais-CMX16+达爱思教仪的各部分功能和使用方法。 2. 掌握十六位机字与字节运算的数据传输格式,验证运算功能发生器及进位控制的组合功能。了解运算器的工作原理。 3. 完成算术、逻辑、移位运算实验,熟悉ALU运算控制位的运用。 ______________________________________________________________________________二.实验环境 Dais-CMX16+达爱思教仪 ______________________________________________________________________________三.实验原理 实验中所用的运算器数据通路如图1-1所示。ALU运算器由CPLD描述。运算器的输出经过2片74LS245三态门与数据总线相连,2个运算寄存器AX、BX的数据输入端分别由4个74LS574锁存器锁存,锁存器的输入端与数据总线相连,准双向I/O输入输出端口用来给出参与运算的数据,经2片74LS245三态门与数据总线相连。 图1-1 运算器数据通路 图1-1中,AXW、BXW在“搭接态”由实验连接对应的二进制开关控制,“0”有效,通过【单拍】按钮产生的负脉冲把总线上的数据打入,实现AXW、BXW写入操作。 表1-1 ALU运算器编码表 算术运算逻辑运算 M M13 M12 M11 功能M M13 M12 M11 功能 M S2 S1 S0 M S2 S1 S0 0 0 0 0 A+B+C 1 0 0 0 读B 0 0 0 1 A—B —C 1 0 0 1 非A 0 0 1 0 RLC 1 0 1 0 A-1
自动控制原理大作业 1.题目 在通常情况下,自动导航小车(AGV )是一种用来搬运物品的自动化设备。大多数AGV 都需要有某种形式的导轨,但迄今为止,还没有完全解决导航系统的驾驶稳定性问题。因此,自动导航小车在行驶过程中有时会出现轻微的“蛇行”现象,这表明导航系统还不稳定。 大多数的AGV 在说明书中都声明其最大行驶速度可以达到1m/s ,但实际速度通常只有0.5m/s ,只有在干扰较小的实验室中,才能达到最高速度。随着速度的增加,要保证小车得稳定和平稳运行将变得越来越困难。 AGV 的导航系统框图如图9所示,其中12=40ms =21ms ττ, 。为使系统响应斜坡输入的稳态误差仅为1%,要求系统的稳态速度误差系数为100。试设计合适的滞后校正网络,试系统的相位裕度达到50o ,并估计校正后系统的超调量及峰值时间。 ()R s () Y s 2.分析与校正主要过程
2.1确定开环放大倍数K 100) 1021.0)(104.0(lim )(lim =++==s s s sK s sG K v (s →0) 解得K=100 ) 1021.0)(104.0(100++=s s s G s 2.2分析未校正系统的频域特性 根据Bode 图: 穿越频率s rad c /2.49=ω 相位裕度?---=?-?--=99.18)2.49021.0(arctan )2.4904.0(arctan 9018011γ 未校正系统频率特性曲线
由图可知实际穿越频率为s rad c /5.34=ω 2.3根据相角裕度的要求选择校正后的穿越频率1c ω 现在进行计算: ???--=+=---55550)021.0(arctan )04.0(arctan 901801111c c ωω 则取s rad c /101=ω可满足要求 2.4确定滞后校正网络的校正函数 由于1120 1~101c ωω)(= 因此取s rad c /1101 11== ωω)(,则由Bode 图可以列出
计算机组成原理实验指导书 山东财经大学
第一节计算机组成原理常用部件实验 一、实验目的 1、掌握计算机组成原理常用部件的结构原理。 2、掌握常用部件的设计过程。 3、熟悉常用部件的功能与应用。 4、掌握常用部件的测试方法。 5、熟悉组成原理实验台和图形输入法软件的使用方法。 二、计算机组成原理中的常用部件 计算机组成原理中的常用部件通常指的是:加法器、数据选择器、译码器、寄存器和计数器等,这些常用部件均为运算器、总线、控制器、存储系统及数据通路的组成部分。熟练掌握常用部件对后续实验将有极大帮助。 三、实验系统置分调模式时,ispLSI1032E的输入、输出资源连接示意图 图1为本实验系统中ispLSI1032E的输入输出资源连接示意图。 ●输入开关:K15-8和K7-0共2组; ●发光管显示:LED15-8、LED7-0共2组; ●时钟脉冲:连续时钟和单脉冲2个; ●复位输入:RET2为ispLSI1032E的复位输入按键。 凡实验系统置分调模式时,以上输入、输出资源可任意编程使用。 图1 ispLSI1032E与输入、输出资源的连接示意图 四、常用部件实验 实验1 数据选择器 1、实验内容及说明 数据选择器是指从多路数据输入中选择一路作为输出,本实验要求设计一个三选一的数据选择器。图2所示为三路数据选择器的框图,图中:A= a3a2a1a0,B=b3b2b1b0,C=c3c2c1c0,E=e3e2e1e0。
2、实验步骤 (1)原理图输入:根据图3电路,采用图形输入法在计算机上完成实验电路的原理图输入。 (2)管脚定义:根据图1中的管脚连接示意图完成原理图中输入、输出管脚的定义。 其中a3a2a1a0定义在k15-k12(33-30),b3b2b1b0定义在k11-k8(29-26),c3c2c1c0定义在k7-k4(60-57),e3e2e1e0定义在LED3-LED0(79-76)。 图3 数据选择器原理图 (3)原理图编译、适配和下载:将实验系统中的模式开关(K23)置于分调模式;在图形输入软件环境中选择ispLSI1032E器件,进行原理图的编译和适配,无误后完成下载。 (4)数据选择器的调试:使用输入开关在数据选择器输入端预置任意数值,然后使AE、BE、CE 分别有效(高电平有效,即开关向上),观察输出E的值是否和相应的输入值相同。 (5)生成元件符号,以备以后使用。 实验2 寄存器 1、实验内容及说明 本实验要求设计一个8位的寄存器,其中d7—d0、q7—q0分别为寄存器的输入和输出,cp为寄存器的时钟脉冲。 图4为8位寄存器的框图。 图5电路为8位寄存器的线路原理图。
自动控制原理 大作业 (设计任务书) 姓名: 院系: 班级: 学号:
5、 参考图 5 所示的系统。试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60度,幅值裕度不小于8 分贝。利用MATLAB 画出 已校正系统的单位阶跃与单位斜坡响应曲线。 + 一.人工设计过程 1、计算数据确定校正装置传递函数 为满足设计要求,这里将超前滞后装置的形式选为 ) 1)(()1)(1()(2 12 1T s T s T s T s K s G c c ββ++++ = 于就是,校正后系统的开环传递函数为)()(s G s G c 。这样就有 )5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205 ==c K 所以 100=c K 这里我们令100=K ,1=c K ,则为校正系统开环传函) 5)(1(100 )(++=s s s s G 首先绘制未校正系统的Bode 图 由图1可知,增益已调整但尚校正的系统的相角裕度为? 23.6504-,这表明系统就是不稳定的。超前滞后校正装置设计的下一步就是选择一个新的增益穿越频率。由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s,将新的增益穿越频率仍选为2rad/s,但要求2=ωrad/s 处的超前相角为? 60。单个超前滞后装置能够轻易提供这一超前角。 一旦选定增益频率为2rad/s,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。要获得另一个转角频率)/(12T βω=,需要知道β的数值,
SAC-T3D 计算机组成原理教学实验仪 实验指导书 电气与信息学院
SAC-T3D 计算机组成原理教学实验仪 实验指导书 电气与信息学院
目录 第一章概述 (1) 第二章实验部分 (3) 实验一时序电路组成、控制原理实验 (3) 实验二运算器组成实验 (6) 实验三半导体存贮器原理实验 (10) 实验四数据通路实验 (14) 实验五微程序控制器实验 (17)
第一章概述 SAC—T3C计算机组成原理实验仪是根据理工科院校计算机组成原理课程大纲的要求和计算机教学迅速发展的需要,在吸收了国内外先进教学成果的基础上设计定型的。 系统采用模块化组合结构,为大学本科、专科、成人高校等层次的《计算机组成原理》、《计算机组成与结构》、《逻辑设计》,等课程提供了实验条件。 整个系统由运算器电路、存贮器电路、数据通路电路、时序发生器电路、微程序控制器电路、模拟输入逻辑开关、脉冲发生电路、电平脉冲测试电路等组成。 由于系统的模块化,学生可通过一系列积木式实验,对CPU 内部的运算功能、控制功能、总线结构、指令系统的设计和微指令的实现以及CPU内部如何工作有直观、深刻的认识。在各项分实验的基础上,通过自己设计并实现一台模型机的运行。从而对计算机的原理、结构,从部件到分系统,直到整机有一个形象的、生动的、本质的认识。有利于培养学生的动手能力,创造性分析问题和解决问题的能力。 SAC-T3C计算机实验仪布局框图如图1。 其中存贮器、运算器及数据通路、时序、微程序控制电路将在今后逐一详细介绍和使用。前四个实验UMBIN和UMAOUT之间的扁平通信线不用插。 作为辅助电路主要有:脉冲电平测试电路用来进行电平测试和脉冲测试,脉冲产生电路用来产生单拍脉冲和连续脉冲,单拍脉冲输出为P和/P常用作实验中的单拍脉冲信号源。连续脉冲输出为Q1、Q2、Q3、Q4其中Q1~Q4为倍频关系,频率决定于晶体频率,如晶体频率为2M,Q1~Q4分别为1MHZ、500KHZ、250KHZ、125KHZ,在实验中可任选一频率作为时序电路中H的连续脉冲输入。
设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定转速48V ; 额定电流4A ; 额定转速=500r/min ; 电枢回路总电阻8=R Ω; 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* *im nm U U 10V ; 两调节器的输出限幅电压为10V ; PWM 功率变换器的开关频率=f 10kHz ; 放大倍数=s K 4.8。 试对该系统进行动态参数设计,设计指标: 稳态无静差; 电流超调量≤i σ5%; 空载起动到额定转速时的转速超调量σ ≤ 25%; 过渡过程时间=s t 0.5 s 。
1.计算电流和转速反馈系数 电流反馈系数:)(A V I U nom im /25.14210 *=?==λβ 转速反馈系数:)/min (02.0500 10 *r V n U nom nm === α 2.电流环的设计 (1)确定时间常数 电流反馈滤波时间常数s ms T oi 0002.02.0==, 调制周期s f T s 0001.01000 1011=?== , 按电流环小时间常数的近似处理方法,取 s T T T oi s i 0003.00002.00001.0=+=+=∑ (2)选择电流调节器结构 电流环可按Ⅰ型系统进行设计。电流调节器选用PI 调节器,其传递函数为 s s K s G i i i ACR ττ1 )(+= (3)选择调节器参数 超前时间常数:s T l i 008.0==τ。 电流环按超调量%5≤i σ考虑,电流环开环增益:取5.0=∑i I T K ,因此 6667.16660003 .05 .05.0=== ∑i I T K 于是,电流调节器的比例系数为 .7778718 .425.18 008.06667.1666=???==s i I i K R K K βτ (4)检验近似条件 电流环的截止频率1/s 6667.1666==I ci K ω。
《机械制造装备设计》课程大作 业 院(系)外国语学院 专业英语-机械设计制造及 自动化 姓名李网 学号1121510202 班号1215102 任课教师张庆春 完成日期2015.5 哈尔滨工业大学机电工程学院 2015年5月
题目:无丝杠车床主传动系统运动和动力设计 设计要求: 序号机床主参数公比φ最低转速级数Z 功率(kW)2 最大加工直径φ320mm无丝杠车床 1.41 30 12 3
目录 一、运动设计 (1) 1 确定极限转速 (1) 2 确定公比 (1) 3 求出主轴转速级数 (1) 4 确定结构式 (1) 5 绘制转速图 (1) 6 绘制传动系统图 (3) 7 确定变速组齿轮传动副的齿数 (3) 8 校核主轴转速误差 (4) 二、动力设计 (5) 1 传动轴的直径确定 (5) 2 齿轮模数的初步计算 (6) 参考文献 (8)
一、运动设计 1、 确定极限转速 根据设计参数,主轴最低转速为31.5r/min ,级数为12,且公比φ=1.41。于是可以得到主轴的转速分别 30, 42.5, 60, 85, 118, 170, 236, 335, 475, 670, 950, 1320 r/min ,则转速的调整范围max min 1320 4430 n n R n ===。 2、 确定公比φ 根据设计数据,公比φ=1.41。 3、 求出主轴转速级数Z 根据设计数据,转速级数Z=12。 4、 确定结构式 按照主变速传动系设计的一般原则,选用结构式为13612322=??的传动方案。其最后扩大组的变速范围6(21)3 1.2688R ?-==≤,符合要求,其它变速组的变速范围也一定符合要求。 5、 绘制转速图 (1)选定电动机 根据设计要求,机床功率为3KW ,可以选用Y100L2-4,其同步转速为 1500r/min ,满载转速为1420r/min ,额定功率3KW 。 (2)分配总降速传动比 总降速传动比为min 30 0.02111420 d n u n ∏= ==,又电动机转速1440/min d n r = 不在所要求标准转速数列当中,因而需要用带轮传动。 (3)确定传动轴的轴数 轴数=变速组数+定比传动副数=3+1=4。
实验一8位算术逻辑运算实验 一、实验目的 1、掌握算术逻辑运算器单元ALU(74LS181)的工作原理。 2、掌握简单运算器的数据传送通路组成原理。 3、验证算术逻辑运算功能发生器74LSl8l的组合功能。 4、按给定数据,完成实验指导书中的算术/逻辑运算。 二、实验内容 1、实验原理 实验中所用的运算器数据通路如图1.1所示。其中运算器由两片74LS181以并/串形成8位字长的ALU构成。运算器的输出经过一个三态门74LS245 (U33)到ALUO1插座,实验时用8芯排线和内部数据总线BUSD0~D7插座BUSl~6中的任一个相连,内部数据总线通过LZDO~LZD7显示灯显示;运算器的两个数据输入端分别由二个锁存器74LS273(U29、U30)锁存,两个锁存器的输入并联后连至插座ALUBUS,实验时通过8芯排线连至外部数据总线EXD0~D7插座EXJl~EXJ3中的任一个;参与运算的数据来自于8位数据开并KD0~KD7,并经过一三态门74LS245(U51)直接连至外部数据总线EXD0~EXD7,通过数据开关输入的数据由LD0~LD7显示。 图1.1中算术逻辑运算功能发生器74LS18l(U3l、U32)的功能控制信号S3、S2、Sl、S0、CN、M并行相连后连至SJ2插座,实验时通过6芯排线连至6位功能开关插座UJ2,以手动方式用二进制开关S3、S2、S1、S0、CN、M来模拟74LSl8l (U31、U32)的功能控制信号S3、S2、S1、S0、CN、M;其它电平控制信号LDDRl、LDDR2、ALUB’、SWB’以手动方式用二进制开关LDDRl、LDDR2、ALUB、SWB 来模拟,这几个信号有自动和手动两种方式产生,通过跳线器切换,其中ALUB’、SWB’为低电平有效,LDDRl、LDDR2为高电平有效。 另有信号T4为脉冲信号,在手动方式下进行实验时,只需将跳线器J23上T4与手动脉冲发生开关的输出端SD相连,按动手动脉冲开关,即可获得实验所需的单脉冲。 2、实验接线
前言 《机电系统控制基础》既是一门理论性较强、又紧密联系工程实际的实践性较强的课程,本课程的重点在于培养学生对机电系统进行建模、分析与控制的能力。难点在于如何使机电类专业的学生结合工程实际,特别是结合机械工程实际,从整体分析系统的动态行为,理解和掌握略显深奥、难懂的经典控制理论,并应用经典控制论中的基本概念和基本方法来分析、研究和解决机械工程中的实际问题。 通过实验教学环节使学生验证课堂教学的理论,使学生能够建立机电系统控制的整体概念,加深对经典控制论中基本概念和基本方法的理解,并掌握其在分析、研究和解决实际机械工程控制问题中的应用。通过三方面的实验:原理性仿真实验,面向机电系统中典型物理对象/系统的特性测试与分析实验,和典型机电系统的控制三方面实验。将所学的课程内容融会贯通,培养学生分析和解决问题的能力。
1 机电系统控制基础原理性仿真实验 1.1 实验目的 通过仿真实验,掌握在典型激励作用下典型机电控制系统的时间响应特性,分析系统开环增益、系统阻尼、系统刚度、负载、无阻尼自振频率等机电参数对响应、超调量、峰值时间、调整时间、以及稳态跟踪误差的影响;掌握系统开环传递函数的各参数辨识方法,最后,学会使用matlab软件对机电系统进行仿真,加深理解系统动态响应特性与系统各参数的关系。 1.2系统典型输入的响应实验 1.2.1 实验原理 1.一阶系统的单位脉冲响应 惯性环节(一阶系统)单位脉冲响应simulink实现图,如图1-1所示 (a)可观测到输出曲线 (b)输入、输出曲线均可观测到 图1-1惯性环节(一阶系统)单位脉冲响应simulink实现图 2.一阶系统的单位阶跃响应 一阶系统的单位阶跃响应simulink实现图如图1-2所示。