、(6分)判断题
1. 线性系统的传递函数与系统的结构及输入信号有关。()
2. 传递函数中的s是有量纲的。()
3. 系统的脉冲响应反映了系统的静、动特性,可作为系统的数学模型。(
)
4. 线性系统的稳定性只与系统的结构有关。()
5. 闭环系统的极点是稳定的实极点,则阶跃响应是无起调的。()
6. 稳态误差为无穷大的系统是不稳定的系统。()
7. 幅频特性相同的系统相频特性必相同。()
8. 单位负反馈系统的开环传递函数为k(tS
2
1)
,式中k 0,t 0,则该系统的稳定s
性与的大小无关()
9. 当系统输入正弦信号时,系统的稳态输出称之为频率特性。()
10. 由最大相位系统的Bode图,当L 0时,若180,则由该系统所得的单
位负反馈系统必稳定。()
11. 单位负反馈系统的开环系统的中频段决定了系统的动静态性能。(
)
12. 串联滞后矫正是利用矫正网络的滞后特性从而改善系统性能的。(
)
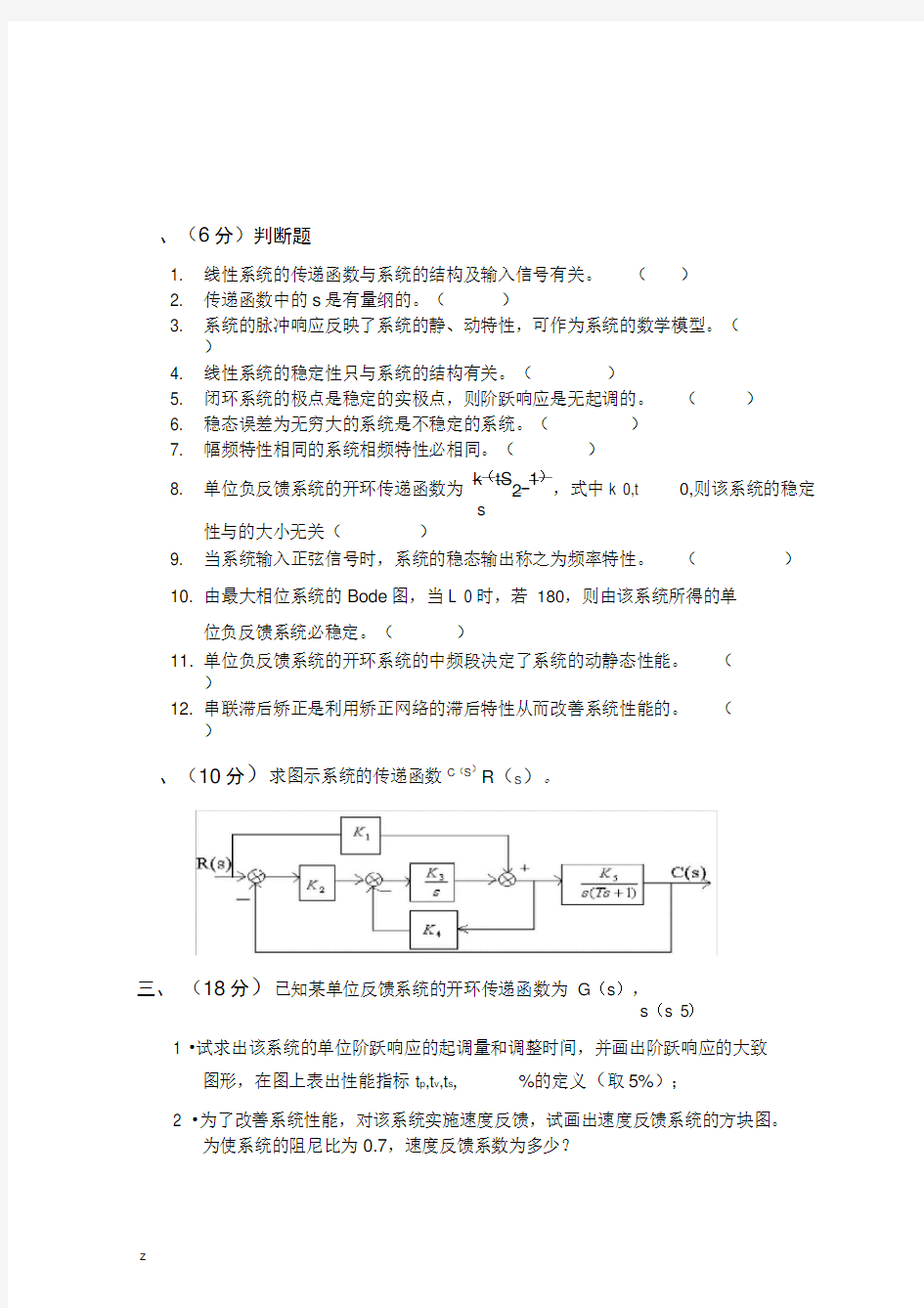
、(10分)求图示系统的传递函数C(S)R(S)。
三、(18分)已知某单位反馈系统的开环传递函数为G(s),
s(s 5)
1 ?试求出该系统的单位阶跃响应的起调量和调整时间,并画出阶跃响应的大致
图形,在图上表出性能指标t p,t v,t s, %的定义(取5%);
2 ?为了改善系统性能,对该系统实施速度反馈,试画出速度反馈系统的方块图。
为使系统的阻尼比为0.7,速度反馈系数为多少?
KO
J
(7;S +1)(7;
5 + 1)
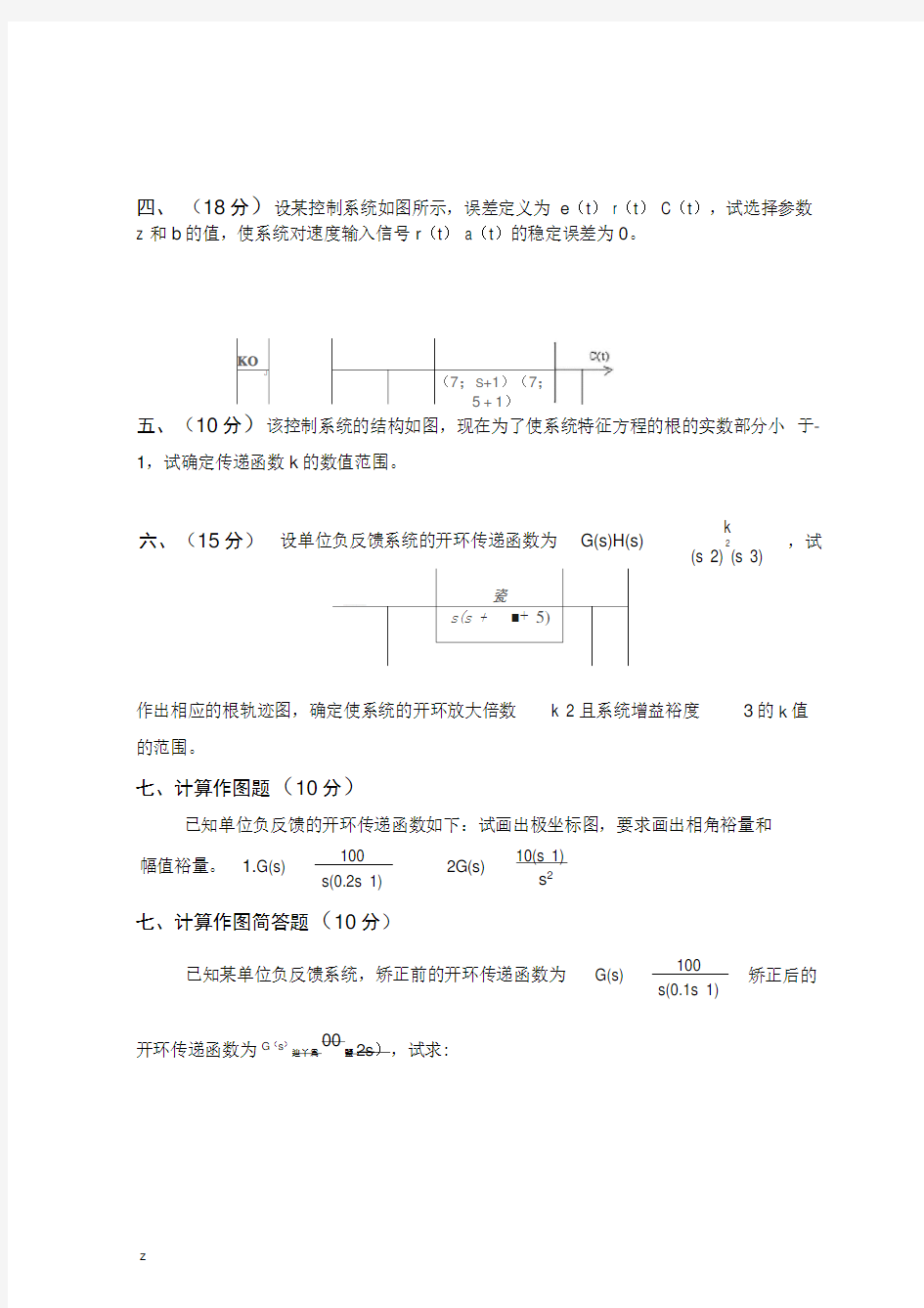
四、 (18分)设某控制系统如图所示,误差定义为 e (t ) r (t ) C (t ),试选择参数
z 和b 的值,使系统对速度输入信号r (t ) a (t )的稳定误差为0。
五、(10分)该控制系统的结构如图,现在为了使系统特征方程的根的实数部分小 于-1,试确定传递函数k 的数值范围。
_______
瓷
s(s + ■+ 5)
作出相应的根轨迹图,确定使系统的开环放大倍数 k 2且系统增益裕度 3的k 值
的范围。
七、计算作图题(10分)
已知单位负反馈的开环传递函数如下:试画出极坐标图,要求画出相角裕量和
七、计算作图简答题(10分)
开环传递函数为
G (s )
辿丫爲
00
鹽
2s ),试求:
六、(15分) 设单位负反馈系统的开环传递函数为 G(s)H(s)
k 2
(s 2) (s 3)
,试
幅值裕量。 1.G(s)
100 s(0.2s 1)
2G(s)
10(s 1) s 2
已知某单位负反馈系统,矫正前的开环传递函数为
G(s)
100 s(0.1s 1)
矫正后的
1. 矫正前后系统的静态速度误差系数,穿越频率c及相位裕度
2. 矫正装置是那种类型?
3. 说明矫正后的系统,哪些方面的特性得到了改善?哪些方面会多出新问
题?
(12 分)
1.F;
2.T
3.T
4.F
5.T 6F 7.F 8.T 9.F. 10.T 11.F 二(10 分)
C(s)
k*
s S k z k s k s
3 2
R(s) T s (1 k3k4T)s k3k4s k3k2k5
(18 分)
解:
2.
“、100
(s)—
s2(15 100k t)s 100
01 n (弧度/秒),
答案:
12.F
1 ? G(s)
100 ;
s(s 5)'
(s)
100
为典型
5s 100
阶系统,
01 (弧度/秒),
2* 10
0.25 ;
1 2*100% 44.5%
1.2(s)
0.25* 10
t s
n
亠1 0.7
2* 10
得 k t
0.09
四. (10分)
五. (10分)
18
六. (15分)
解:开环极点 P 1,2 2, P 3
3
解:
(s)
C(s) R(s)
(zs
E(s) R(s) C(s) b
T
k i
(T | T 2 )s 1 k 1
R(s) (s)R(s) 2
T 1T 2s
仃1 T 2 k 1z)s (1 k 1
2
T 1T 2 s (T 1 T 2) s 1 k 1
bkj
R(s)
当 r(t) at 时,
R(t) -ar,
s
e ss lim sE(s)
s 0
2
T 1T 2s (T 1 T 2 k 1z)s (1 k 1 bk 1) a
lim s
s 0
2
T 1T 2s
(T 1 T 2 )s 1 k 1
T 1 T 2 k 1 z
1 k 1
1 k 1 bk 1 (1 k 1)s ]a
T 2 k 1
k 1 k 1
时,e ss 0
实轴上根轨迹(,3]
3 2 2 7 渐进线玄
3 3
a
60 ,180
与虚轴交点
s 3 7s 2 16s K
12 0
s 3 1 16 s 2
7
K 12
16 s 0 K 12
此时,由s 2行 7s 2 (K 12) 0
即 7 s 2+ 112 二 0,得 % j4 o
又增益裕度为 H ,要求 ?
3即100
3
K K
K
12
临界稳定时的K
K c 100
(令 16
K 12 7
0得到)
由于开环放大倍数 K
K 12
要求K 2即K 24
七.(10分)
八.( 15分)
2.相位超前校正。
稳定误差未变。快速性和稳定性得到了改善。不过,系统抗高频干扰的能力有所下降。
一.选择题:(10分)
—是属于( )。
1 0.11s
(2) 相位滞后矫正;
所以当24 K
100时,能满足K 2,增益裕度
3
3的要
求。
(1)
(2)
-1
1
厂0
1
^-0 +
84.3 ,
c
10, h
/,l Im
_____
12.8 ,
A0
c 22, h
1.校正前:K v 100(1/s), c 31.62(1/s), 17.55 ;
校正后:K v 100(1/s), c 44.72(1/s), 49.43
1 .有串联矫正环节G c(s)
(1)相位超前矫正;