Research of Trajectory Planning for Mobility Assistance Robot Based on CKF
Fucheng Cao??,Yuanchun Li?and Lirong Wang?,
?College of Communication Engineering
JiLin University,ChangChun130022,China
Email:arthurcao@https://www.doczj.com/doc/4c7433203.html,
?College of Electronic Information and Engineering
Changchun University,Changchun130022,China
Abstract—According to the problem on tracking planning of mobility assistance robot,a tracking planning method was presented using the kalman?lter(KF).Based on known nonholonomic dynamic model of mobility assistance robot, the cubature kalman?lter(CKF)was used to improve the in?uence of nonlinear system,and the autonomous navigation and control of mobility assistance robot was realized.The experimental results indicate that the method presented in this paper was excellent than extended kalman?lter(EKF)and unscented kalman?lter(UKF)in the stability,precision and computational complexity.
Keywords-mobility assistance robot;tracking planning; CKF;tracking;
I.I NTRODUCTION
Mobility assistance robot[1],[2]can improve the quality of life for people with disabilities,such as spinal cord injuries,poliomyelitis,and the aged.As one kind of ser-vice robots,it works independently or semi-autonomously. In the research of mobility assistance robot system,self-localization and motion control is the focus and dif?cult problem[3].In this paper,the research object is the two-wheel driven mobile robot.
The main localization schemes to mobile robot are relative and absolute positioning.Relative positioning identify new position based on the initial position and the change of position and orientation.Due to the integral operation of measured value,the noise has been integral,which causes the in?nite growth of the error in time and distance.Absolute positioning is in a global coordinate system to determine the moving target position with the help of beacons or landmarks.Absolute positioning can eliminates the error accumulated and does not depend on the time and initial position.In this paper,absolute positioning is used. Fusing the data from different sources by probabilistic,we can improve the positioning accuracy.The popular method used is the Kalman?lter(KF)in the linear system.For the nonlinear system,the Extended Kalman?lter(EKF)[4], unscented Kalman?lter(UKF)and the particle?lter(PF) are used.The EKF is based on the principle of linearization, which produces lower tracking accuracy and poor stability. The UKF does not need to compute the Jacobian matrix because of the linearization instead by the nonlinear model.However,with increasing of states dimension,the UKF algorithm performance decreases signi?cantly.Although the unscented transform can improve variance matrix positive-de?nite,but the distance from the sampling point to the cen-ter point increases with the dimensionality.When the scale factorκis negative,the predicted covariance is not positive semi-de?nite,which leads to computing termination.Julier presented the scale factor of UT in[5],but it is quit dif?cult to select the scale factor.To the particle?lter,the positioning resolution is the exponential relationship to the sampling particles.The cubature Kalman?lter(CKF)[6]is presented by the Ienkaran and Haykin in2009.The signi?cant idea of the CKF is a third-degree spherical-radial cubature rule that approximates integrals,The cubature rule uses a set of2n equally weighted cubature points,where n is the dimension of the integration domain.The cubature rule is exact for nonlinear functions belonging to monomials of degree three or https://www.doczj.com/doc/4c7433203.html,pared with the KF,EKF,UKF and PF,The CKF can deal with high-dimensional state estimation of nonlinear system greatly and the computational complexity is lower. The main structure is as follows;the section II describes the kinematics model of mobility robot;The section III,a tracking system model is derived;The square-root cubature kalman?lter for tracking is proposed in the section IV;The section V presents the simulations;Finally,a summarize is given.
II.K INEMATICS M ODEL OF M OBILITY R OBOT
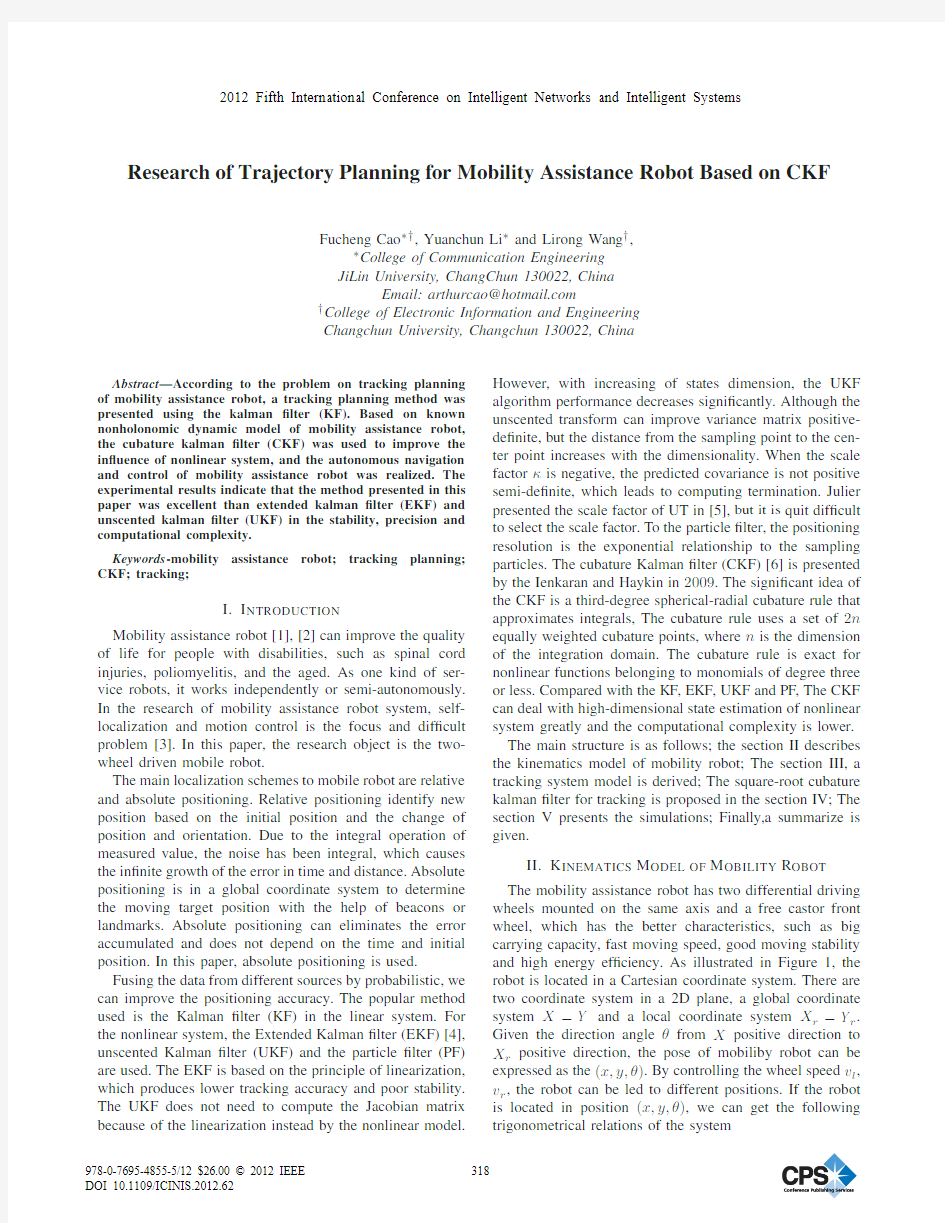
The mobility assistance robot has two differential driving wheels mounted on the same axis and a free castor front wheel,which has the better characteristics,such as big carrying capacity,fast moving speed,good moving stability and high energy ef?ciency.As illustrated in Figure1,the robot is located in a Cartesian coordinate system.There are two coordinate system in a2D plane,a global coordinate system X?Y and a local coordinate system X r?Y r. Given the direction angleθfrom X positive direction to X r positive direction,the pose of mobiliby robot can be
expressed as the(x,y,θ).By controlling the wheel speed v l, v r,the robot can be led to different positions.If the robot is located in position(x,y,θ),we can get the following trigonometrical relations of the system
2012 Fifth International Conference on Intelligent Networks and Intelligent Systems
Figure 1.Kinematics Model of Mobility Robot
ICC =[x ?R sin(θ),y +R cos(θ)](1)
where ICC is the robot instantaneous curvature center.Given the wheel speed v l ,v r are the function of time,and the robot locates in (x,y,θ)in the time t .we control the both wheels at the same gound contact speed.In the time (t +Δt ),the position of the robot is given by
?
??x
y θ ???=T ???x ?ICC x y ?ICC y θ???+???ICC x ICC y ωΔt ?
??,(2)
T =?
?
?cos(ωΔt )?sin(ωΔt )
0sin(ωΔt )cos(ωΔt )
000
1?
?
?.The Equation (2)describes the robot rotating R around its ICC with an angular velocity ω.Different classes of robots will provide different expressions for R and ω.It is possible to compute where the robot will be at any time t based on the control parameters v l and v r ,which is solved by integrating the Equation (2)from some initial condition (x 0,y 0,θ0).This is known as a forward kinematics problem.To the vehicle of a differential drive,it is given by
x (t )=12 t
0[v r (t )+v l (t )]cos[θ(t )]dt,
y (t )=12 t
[v r (t )+v l (t )]sin[θ(t )]dt,
(3)
θ=1L t 0
[v r (t )?v l (t )]dt.
The Equation (3)describes a constraint on the robot velocity that cannot be integrated into a positional constraint.This is known as a nonholonomic constraint and it is in general very dif?cult to solve.Considering the controlling and planning easily and simply,it is assumed that v l (t )=v l ,v r (t )=v r and v l =v r ,then (3)
yields
Figure 2.
Principle of Localization
x (t )=L 2v r +v l v r ?v l sin
t
L (v r ?v l )
,y (t )=?L 2v r +v l v r ?v l cos t L (v r ?v l )
+L 2v r +v l
v r ?v l
,
(4)
θ=t
L
(v r (t )?v l (t ))dt.
where (x,y,θ)t =0=(0,0,0).Given a time t and target position (x,y ).Control parameters v r and v l can be obtained by solving Equation (4),but to θ,we can not get the only solution.
III.T RACKING M ODEL
From the perspective of tracking model,mobility assis-tance robot is a nonlinear system.The control of input u (k )=[P (k )Δθ(k )]T expresses robot moving P (k )dis-tance and rotating Δθ(k )angular during k to k +1.The state of mobility robot is given by x (k )=[x (k )y (k )θ(k )]T .The state equation can be expressed by
x (k +1)=f (x (k ),u (k ))+v (k )
(5)
where v (k )is the Gaussian noise function with zero average and covariance Q ,f (·)is the state transition function as following presented
f (x (k ),u (k ))=???x (k )+P (k )cos[θ(k )]y (k )+P (k )sin[θ(k )]θ(k )+Δθ(k )
??
?(6)
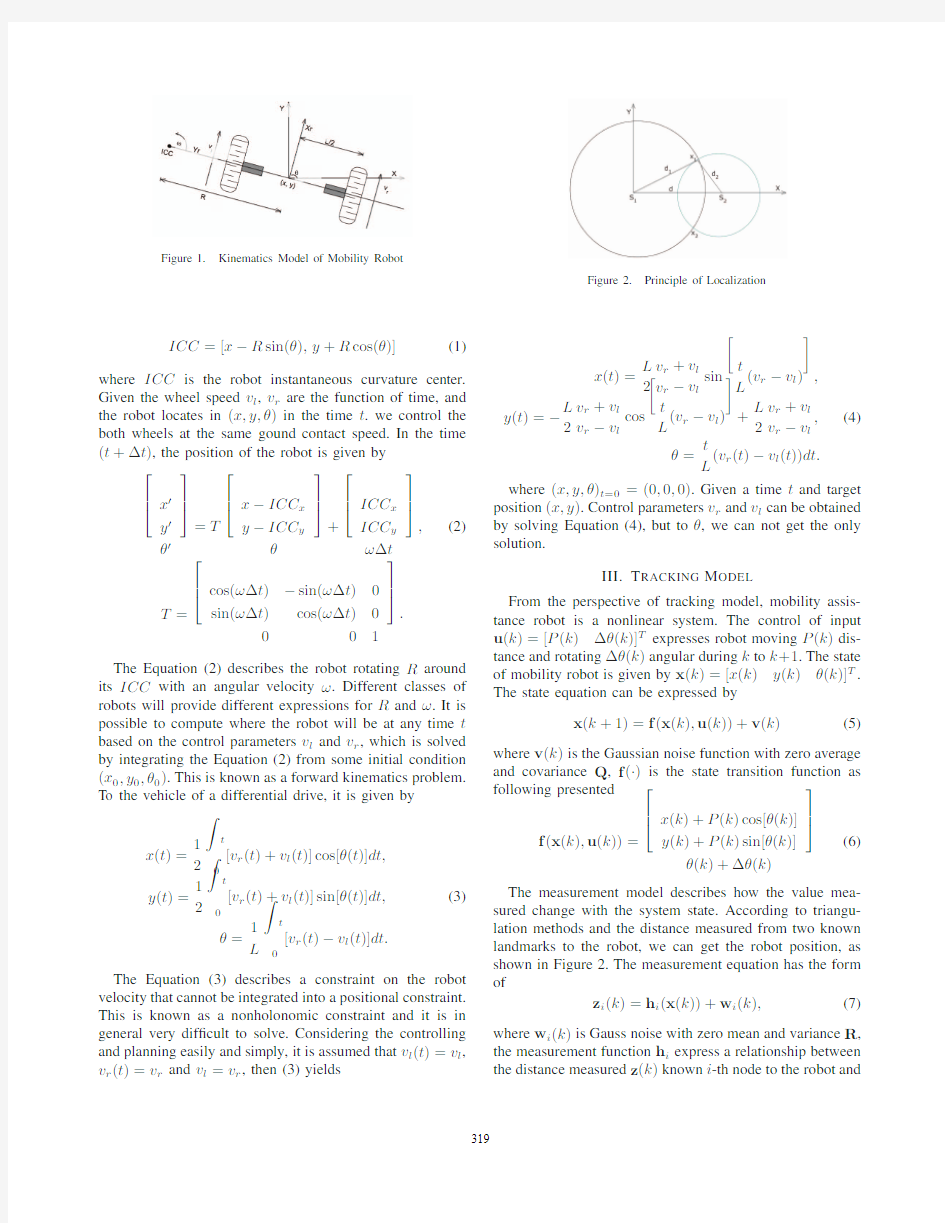
The measurement model describes how the value mea-sured change with the system state.According to triangu-lation methods and the distance measured from two known
landmarks to the robot,we can get the robot position,as shown in Figure 2.The measurement equation has the form of
z i (k )=h i (x (k ))+w i (k ),(7)where w i (k )is Gauss noise with zero mean and variance R ,
the measurement function h i express a relationship between the distance measured z (k )known i -th node to the robot and
the state variable x (k ).Given the known node is located at (x s ,y s ),the measurement equation is given by
z 1(k )=
[x (k )?x s ]2+[y (k )?y s ]2+w 1(k ).
(8)IV.S QUARE -ROOT C UBATURE K ALMAN F ILTER Cubature Kalman Filter [6]has been proposed for high
dimension nonlinear state estimation,which signi?cant con-tribution is the spherical radial numerical integration rule.The computational complexity is in proportion to the dimen-sion of state n when fully symmetric numerical integration rule is taken with the monomial number d =3.In order to ensure the continuous running of CKF,Square-root Cubature Kalman Filter is introduced.
By the matrix QR decomposition operation,the covari-ance matrix P can be expressed as
P =AA T =R T Q T QR =R T R =SS T ,
(9)
where A =QR .In this paper,we have used the CKF
for controlling and tracking of mobility robot.The CKF is detailed in Algorithm 1.
V.S IMULATION
Both of ?xed nodes position are in (x s 1,y s 1)=(0,0),(x s 2,y s 2)=(0,10)respectively,Mobility robot moves around a circular and T (k )=0.05,Δθ(k )=0.4.The number of data points received is 1000.The process noise covariance and measurement noise covariance are Q =0.01×eye (3),R =0.01×eye (2)respectively.The initial
position is x (0)=[660]T and the Square-root of initial covariance is S (0)=√
Q .the times of experiments is 10.To the algorithm of EKF,the Jacobian matrix of the state transfer function and the measurement function are
?f =???10?P (k )sin[θ(k )]01P (k )cos[θ(k )]001
???,
?h =?
??2x (k )[x (k )?x b ]
2y (k )[y (k )?y b ]0
??
?T
.
To the algorithm of UKF,α=1e ?3,κ=0,β=2[7].The computer hardware is the Intel 2.93GH dual-core processor and the kernel of operating system is the Linux 2.6.32version.The version of simulation software is Matlab 7.8(R2009a).The experimental results is shown in Figure 3,4,5and Figure 6.The performance analysis is shown in table I.All the experiment results are shown that the CKF algorithm is better than EKF and UKF algorithm in stability,complexity and tracking precision.
Algorithm 1Cubature Kalman Filter
Prediction
1:Evaluate the cubature points (i =1,...,L ;L =2n x )
x i,k ?1|k ?1=S x,k ?1|k ?1ξi +?x
k ?1|k ?1,n x is dimension of states,ξi =
L/2·[1],[1]∈R is the set
of 10 , 01 , ?10 , 0
?1
2:Evaluate the propagated cubature point sets
?x
i,k ?1|k ?1=f (x i,k ?1|k ?1,u k ?1)3:Estimate the predicted state
?x
k |k ?1=L
i =1
ωi ?x
i,k ?1|k ?14:Estimate the square-root factor of the predicted error covariance
S x,k |k ?1=T ria ([?X
k |k ?1S v,k ?1]),
S v,k ?1is the square-root factor of P v,k ?1,
?X
k |k ?1=[?x 1,k |k ?1??x k |k ?1,···,?x L,k |k ?1??x k |k ?1]W Measurement Update
5:Evaluate the cubature points (i =1,...,L ).
x i,k |k ?1=S x,k |k ?1ξi +?x
k |k ?1,6:Evaluate the propagated cubature points
?z
i,k |k ?1=h (x i,k |k ?1,u k )7:Estimate the predicted measurement
?z k |k ?1=
L
i =1
ωi ?
z i,k ?1|k ?18:Estimate the innovation covariance matrix
S z,k |k ?1=T ria ([?Z
k |k ?1S n,k ]),
S n,k is the square-root factor of P n,k ,
?Z k |k ?1=[?z 1,k |k ?1??z k |k ?1,···,?z L,k |k ?1??z k |k ?1]W 9:Estimate the cross-covariance matrix
P xz,k |k ?1=X k |k ?1Z T
k |k ?1
where
X k |k ?1=[x 1,k |k ?1??x
k |k ?1,···,x L,k |k ?1??x k |k ?1]W 10:Estimate the cubature Kalman gain
K k =(P xz,k |k ?1/S T z,k |k ?1)/S z,k |k ?1
11:Estimate the updated state
?x k |k =?x k |k ?1+K k (z k ??z k |k ?1)
12:Estimate the corresponding error covariance
S x,k |k =T ria ([X k |k ?1?K k Z k |k ?1
K k S n,k ])
Table I
C OMPARISON OF THE ALGORITHMS EXPERIMENTED
Parameters of compared
Algorithms
EKF
UKF CKF Computing time (s)1.136.343.04Times of divergence 860Rato of (error >20cm)
24.20%
10.10%
0.15%
Figure 3.Position tracking simulation
Figure 4.Direction tracking simulation
Figure 5.Tracking error of x direction
Figure 6.Tracking error of y direction
VI.C ONCLUSION
This paper proposed a scheme for mobility assistance robot controlling and tracking based on CKF.The simu-lation results shown that the scheme proposed improved the stability and accuracy for mobility robot tracking,and the computer complexity is lower than other nonlinear tracking methods.
A CKNOWLEDGMENT
The research activities have been funded by Jilin Province Department of Education (No.2012252)and Changchun City Department of Science and Technology (No.2010036).
R EFERENCES
[1]P.Viswanathan,J.Little,A.Mackworth,A.Mihailidis,Adap-tive Navigation Assistance for Visually-Impaired Wheelchair Users ,in IROS Workshop on New and Emerging Technologies in Assistive Robotics,San Francisco,California,2011.[2]Broekens J.,Heerink M.and Rosendal H.Assistive social
robots in elderly care:a review .Gerontechnology 2009;8(2):94-103.
[3]Guilherme N.DeSouza and Avinash C.Kak.Vision for Mobile
Robot Navigation:A Survey .IEEE Transactions on Pattern Analysis and Machine Intelligence archive,V ol.24no 2,pp.237-267,Feb.2002.
[4] D.Simon,Using Nonlinear Kalman Filtering to Estimate
Signals ,Embedded Systems Design,vol.19,no.7,pp.38-53,Jul.2006.[5]Simon J.Julier,and Jeffrey K.Uhlmann,Unscented Filtering
and Nonlinear Estimation ,Proceedings of the IEEE,vol.92.no.3,pp.401-422,Mar.2004.[6]I.Arasaratnam,and S.Haykin,Cubature Kalman Filtering ,
IEEE Transactions on In Automatic Control,vol.54,no.6,pp.1254-1269,Jun.2009.
[7]Wan,E.A.,and Van Der Merwe,R.,The unscented Kalman
?lter for nonlinear estimation ,Adaptive Systems for Signal Processing,Communications,and Control Symposium,pp.153–158,Oct.2000.
“的、地、得”的用法和区别 导入(进入美妙的世界啦~) “的、地、得”口诀儿歌 的地得,不一样,用法分别记心上, 左边白,右边勺,名词跟在后面跑。 美丽的花儿绽笑脸,青青的草儿弯下腰, 清清的河水向东流,蓝蓝的天上白云飘, 暖暖的风儿轻轻吹,绿绿的树叶把头摇, 小小的鱼儿水中游,红红的太阳当空照, 左边土,右边也,地字站在动词前, 认真地做操不马虎,专心地上课不大意, 大声地朗读不害羞,从容地走路不着急, 痛快地玩耍来放松,用心地思考解难题, 勤奋地学习要积极,辛勤地劳动花力气, 左边两人双人得,形容词前要用得, 兔子兔子跑得快,乌龟乌龟爬得慢, 青青竹子长得快,参天大树长得慢, 清晨锻炼起得早,加班加点睡得晚, 欢乐时光过得快,考试题目出得难。 知识典例(注意咯,下面可是黄金部分!) 的、地、得 “的”、“地”、“得”的用法区别本是中小学语文教学中最基本的常识,但在使用中也最容易发生混淆,再加上一段时间里,中学课本中曾将这三个词的用法统一为“的”,因此造成了很多人对它们的用法含混不清进而乱用一通的现象。
一、“的、地、得”的基本概念 1、“的、地、得”的相同之处。 “的、地、得”是现代汉语中高频度使用的三个结构助词,都起着连接作用;它们在普通话中都读轻声“de”,没有语音上的区别。 2、“的、地、得”的不同之处。 吕叔湘、朱德熙所著《语法修辞讲话》认为“的”兼职过多,负担过重,而力主“的、地、得”严格分工。50 年代以来的诸多现代汉语论著和教材,一般也持这一主张。从书面语中的使用情况看,“的”与“地”、“得”的分工日趋明确,特别是在逻辑性很强的论述性、说明性语言中,如法律条款、学术论著、外文译著、教科书等,更是将“的”与“地”、“得”分用。 “的、地、得”在普通话里都读轻声“de”,但在书面语中有必要写成三个不同的字:在定语后面写作“的”,在状语后面写作“地”,在补语前写作“得”。这样做的好处,就是可使书面语言精确化。 二、“的、地、得”的用法 1、的——定语的标记,一般用在主语和宾语的前面。“的”前面的词语一般用来修饰、限制“的”后面的事物,说明“的”后面的事物怎么样。结构形式一般为:形容词、名词(代词)+的+名词。如: ①颐和园(名词)的湖光山色(主语)美不胜收。 ②她是一位性格开朗的女子(名词,宾语)。 2、地——状语的标记,一般用在谓语(动词、形容词)前面。“地”前面的词语一般用来形容“地”后面的动作,说明“地”后面的动作怎么样。结构方式一般为:形容词(副词)+地+动词(形容词)。如: ③她愉快(形容词)地接受(动词,谓语)了这件礼物。 ④天渐渐(时间副词)地冷(形容词,谓语)起来。 3、得——补语的标记,一般用在谓语后面。“得”后面的词语一般用来补充说明“得”前面的动作怎么样,结构形式一般为:动词(形容词)+得+副词。如: ⑤他们玩(动词,谓语)得真痛快(补语)。
英语单词惯用法集锦 习惯接动词不定式的动词(V to inf) adore(vi极喜欢) dread (vt.不愿做,厌恶)plan 计划 afford(+to,vt有条件,能承担)endeavour (vt,竭力做到,试图或力图)prefer(vt.宁可;宁愿(选择);更喜欢)agree 同意endure(忍受.cannot ~ to) prepare准备 aim (vi[口语]打算:) engage (vi.保证,担保;) presume(vt.冒昧;敢于[用于第一人称时为客套话]:) appear (vi.似乎;显得) essay(vt.尝试,试图) pretend(vt.自命;自称;敢于;妄为) apply (申请)expect(期望,希望)proceed(开始,着手,)arrange (vi.做安排,(事先)筹划)fail (vt.未做…;疏忽)promise(许诺,保证做 ask (要求)forget (vt. 忘记)purpose (vt.决心,打算) beg (vt.正式场合的礼貌用语]请(原谅),请(允许):I beg to differ.恕我不能赞同)guarantee(保证,担保)refuse(拒绝)bear 承受,忍受hate([口语]不喜欢;不愿意;)regret (vt. 抱歉;遗憾)begin help (有助于,促进)remember(记住) bother (vi.通常用于否定句]麻烦,费心)hesitate(vi.犹豫;有疑虑,不愿)scheme(策划做)care (vt.想要;希望;欲望[后接不定式,常用于否定、疑问及条件句中])hope (vt.希望,盼望,期待)seek(vt.谋求,图谋[后接不定式]) cease (停止; 不再(做某事)[正式] intend (打算;想要)seem(似乎,好像[后接不定式或从句];觉得像是,以为[ choose (意愿;选定;决定)itch start开始claim (vt. 主张;断言;宣称) continue (继续)like 喜欢swear(vt.起誓保证;立誓要做(或遵守) dare (vt.敢,敢于,勇于,胆敢)long(vi.渴望;热望;极想) decline(vt.拒绝,拒不(做、进入、考虑等) manage(设法完成某事)threaten(vt.威胁,恐吓,恫吓)deign (屈尊做)mean(有意[不用进行时)trouble(vi.费心,费神;麻烦)demand(vi.要求,请求:)need (需要)try(设法做) deserve (应得) neglect (疏忽) undertake(承诺,答应,保证) desire (希望渴望)offer(表示愿意(做某事),自愿;)venture(冒险(做某事))determine(vi.决心,决意,决定,)omit (疏忽,忘记)want 想要 die (誓死做)pine (渴望)wish (希望) 习惯接“疑问词+动词不定式”的动词(有时也包括VN wh-+to do) advise 建议explain 解释perceive 觉察,发觉 answer 答复find 得知,察觉persuade 说服,劝说;使某人相信 ask 询问,问forget 忘记phone 打电话 assure 保证guess 臆测,猜度pray 祈祷 beg 请求,恳求hear 小心聆听(法庭案件)promise 允诺 conceive 想象,设想imagine 以为,假象remember记得 consider 考虑,思考indicate 暗示remind 提醒,使想起 convince 使相信inform告知通知instruct告知,教导 see 看看,考虑,注意decide 解决,决定know 学得,得知 show 给人解释;示范;叙述;discover发现;知道learn 得知,获悉 signal以信号表示doubt 怀疑,不相信look 察看;检查;探明 strike 使想起;使突然想到;使认为suggest 提议,建议tell 显示,表明;看出,晓得;warn 警告,告诫think 想出;记忆,回忆;想出,明白wonder 纳闷,想知道 wire 打电报telegraph 打电报 习惯接动名词的动词(包括v+one’s/one+v+ing) acknowledge 认知,承认…之事实escape免除,避免omit疏忽,忽略 admit 承认,供认excuse 原谅overlook 放任,宽容,忽视adore (非正式)极为喜欢fancy 构想,幻想,想想postpone 延期,搁置 advise 劝告,建议finish完成prefer较喜欢 appreciate 为…表示感激(或感谢)forbid 不许,禁止prevent预防 avoid 逃避forget 忘记prohibit 禁止,妨碍
The way 的用法 Ⅰ常见用法: 1)the way+ that 2)the way + in which(最为正式的用法) 3)the way + 省略(最为自然的用法) 举例:I like the way in which he talks. I like the way that he talks. I like the way he talks. Ⅱ习惯用法: 在当代美国英语中,the way用作为副词的对格,“the way+ 从句”实际上相当于一个状语从句来修饰整个句子。 1)The way =as I am talking to you just the way I’d talk to my own child. He did not do it the way his friends did. Most fruits are naturally sweet and we can eat them just the way they are—all we have to do is to clean and peel them. 2)The way= according to the way/ judging from the way The way you answer the question, you are an excellent student. The way most people look at you, you’d think trash man is a monster. 3)The way =how/ how much No one can imagine the way he missed her. 4)The way =because
in on at 区别用法 妙计口诀 1.早、午、晚要用in, at黎明、午夜、点与分。 年、月、年月、季节、周, 阳光、灯、影、衣、帽用in。 将来时态in...以后, 小处at大处in。 有形with无形by, 语言、单位、材料in。 特征、方面与方式, 心情成语惯用in。 介词at和to表方向, 攻击、位置、恶、善分。 2.日子、日期、年月日,星期加上早、午、晚, 收音、农场、值日on,关于、基础、靠、著论。 着、罢、出售、偷、公、假,故意、支付、相反,准。 特定时日和“一……就”,on后常接动名词。 年、月、日加早、午、晚,of之前on代in。 步行、驴、马、玩笑on,cab,carriage则用in。 at山脚、门口、在当前,速、温、日落、价、核心。 如大体掌握上面介词用法口诀,就不易出错。下面对该口诀分别举例帮助你理解消化。 <1.>关于时间 早、午、晚要用in in the evening 在晚上 in the day 在白天 例: in the afternoon 在下午 in the morning 在早上 at黎明、午、夜、点与分 例 at dawn /at daybreak 在黎明时候 at night 在夜间 at noon 在中午 at midnight 在午夜 (以上短语都不用冠词)
at nine o'clock 在9点钟 at half past ten 在10点半 at ten thirty a.m. 在上午10点30分 at the weekend 在周末 at a quarter to two 1点45分 <2.>关于年、月、年月、季节、周 即在“来年”,在“某月”,在“某年某月” 但在某年某月某日则用on ,在四季,在第几周等都要用in。 in 1927 在1927年 in March 在三月 in December 1986 在1986年12月 in July l984 在1984年7月 in the first week of this semester这学期的第一周 in the third week 在第三周 in spring 在春季 <3.>关于日子、日期、年月日,星期加上早午晚 以下皆用on on October the first 1949 1949年10月1日 on May the first 5月1日 on the sixteenth 16号 on the second of January /on January the second 1月2日 on a summer evening 在夏天的一个夜晚 on New Year's Day 在元旦 on my birthday 在我的生日 on winter day 在冬天 on December 12th 1950 l950年12月12日 on Sunday 在星期天 on Tuesday morning 星期二早晨 但last night 昨夜;in the evening 在晚上 on time准时,in time及时,等则不同。 【注】in the Christmas holidays在圣诞节假期 in the eighteenth century 在十八世纪 in ancient times 在古代 in earlier times 在早期 in modern times 在现代,则用in,at the present time 现在,at the present day当今则用at。 <4.>关于年月日,加早午晚,of之前on代in on the morning of 18th 18日早晨 On the eve of their departure在临行前夕 <5.>阳光、灯、影、衣、冒 in
的、地、得的用法和区别 的、地、得的用法和区别老班教育 一、的、地、得的基本概念 1、的、地、得的相同之处。 的、地、得是现代汉语中高频度使用的三个结构助词,都起着连接作用;它们在普通话中都读轻声de,没有语音上的区别。 2、的、地、得的不同之处。 吕叔湘、朱德熙所著《语法修辞讲话》认为的兼职过多,负担过重,而力主的、地、得严格分工。50 年代以来的诸多现代汉语论著和教材,一般也持这一主张。从书面语中的使用情况看,的与地、得的分工日趋明确,特别是在逻辑性很强的论述性、说明性语言中,如法律条款、学术论著、外文译著、教科书等,更是将的与地、得分用。 的、地、得在普通话里都读轻声de,但在书面语中有必要写成三个不同的字:在定语后面写作的,在状语后面写作地,在补语前写作得。这样做的好处,就是可使书面语言精确化。 二、的、地、得的用法 (一)、用法 1、的——定语的标记,一般用在主语和宾语的前面。的前面的词语一般用来修饰、限制的后面的事物,说明的后面的事物怎么样。 结构形式一般为:形容词、名词(代词)+的+名词。如: 颐和园(名词)的湖光山色(主语)美不胜收。 她是一位性格开朗的女子(名词,宾语)。 2、地——状语的标记,一般用在谓语(动词、形容词)前面。地前面的词语一般用来形容地后面的动作,说明地后面的动作怎么样。 结构方式一般为:形容词(副词)+地+动词(形容词)。如: 她愉快(形容词)地接受(动词,谓语)了这件礼物。 天渐渐(时间副词)地冷(形容词,谓语)起来。 3、得——补语的标记,一般用在谓语后面。得后面的词语一般用来补充说明得前面的动作怎么样。 结构形式一般为:动词(形容词)+得+副词。如: 他们玩(动词,谓语)得真痛快(补语)。 她红(形容词,谓语)得发紫(补语)。 (二)、例说 的,一般用在名词和形容词的后面,用在描述或限制人物、事物时,形容的词语与被形容的词语之间,表示一种描述的结果。如:漂亮的衣服、辽阔的土地、高大的山脉。结构一般为名词(代词或形容词)+的+名词。如,我的书、你的衣服、他的孩子,美丽的景色、动听的歌曲、灿烂的笑容。 地,用法简单些,用在描述或限制一种运动性质、状态时,形容的词语与被形容的词语之间。结构通常是形容词+地+动词。前面的词语一般用来形容后面的动作。一般地的后面只跟动词。比如高兴地跳、兴奋地叫喊、温和地说、飞快地跑;匆匆地离开;慢慢地移动......... 得,用在说明动作的情况或结果的程度时,说明的词语与被说明的词语之间,后面的词语一般用来补充和说明前面的情况。比如。跑得飞快、跳得很高、显得高雅、显得很壮、馋得直流口水、跑得快、飞得高、走得慢、红得很……得通常用在动词和形容词(动词之间)。
1、keep ①keep + 形容词表示“保持” Please keep quite. 请保持安静。 ②keep + 宾语+ 形容词(或介词短语)表示“把……保持在某一状态” We must do everything we can to keep the air clean. 我们必须尽一切所能保持空气清洁。 ③keep sb doing sth 表示“让某人做某事” ——只能用现在分词作宾语补足语,不能用不定式。 He kept us waiting for two hours. 他让我们等了两个小时。 He kept us to wait for two hours. (错误) ④keep on doing sth和keep doing sth 表示“继续做某事,反复做某事”,可换用。 但keep on doing 更强调动作的反复性或做事人的决心。 He keeps on phoning me, but I don’t want to talk to him. Though he failed 3 times, he kept on trying. 他老是给我打电话,但我不想同他讲话。虽然他已失败了3次,但他仍继续干下去。 keep doing sth 经常用于静态动词。 He kept lying in bed all day long. 他整天都躺在床上。 ⑤keep …from doing sth 表示“阻止,使免于” He kept them from fishing in the lake. 他不让他们在那个湖里捕鱼。 2、may not / mustn’t / needn’t / wouldn’t ①may not be 是may be的否定式,意为“可能不是,也许不是” He may be there.他可能在那里。He may not be there.他可能不在那里。 ②must 意为“必须”,mustn’t 意为“千万不可,绝对不可” 所以Must we/I ……?的否定回答要用needn’t—意为“不必” -Must we get there before 11 o’clock? -No, we needn’t. ③wouldn’t = would not 意为“不会,不愿” I wouldn’t say no. 3、do ①do表示“做”,做某事,常指某种不具体的活动;make表示“制作”,指做出某种具体的东西。
The way的用法及其含义(二) 二、the way在句中的语法作用 the way在句中可以作主语、宾语或表语: 1.作主语 The way you are doing it is completely crazy.你这个干法简直发疯。 The way she puts on that accent really irritates me. 她故意操那种口音的样子实在令我恼火。The way she behaved towards him was utterly ruthless. 她对待他真是无情至极。 Words are important, but the way a person stands, folds his or her arms or moves his or her hands can also give us information about his or her feelings. 言语固然重要,但人的站姿,抱臂的方式和手势也回告诉我们他(她)的情感。 2.作宾语 I hate the way she stared at me.我讨厌她盯我看的样子。 We like the way that her hair hangs down.我们喜欢她的头发笔直地垂下来。 You could tell she was foreign by the way she was dressed. 从她的穿著就可以看出她是外国人。 She could not hide her amusement at the way he was dancing. 她见他跳舞的姿势,忍俊不禁。 3.作表语 This is the way the accident happened.这就是事故如何发生的。 Believe it or not, that's the way it is. 信不信由你, 反正事情就是这样。 That's the way I look at it, too. 我也是这么想。 That was the way minority nationalities were treated in old China. 那就是少数民族在旧中
at, in与on的用法区别 1. 表示时间,注意以下用法: ①表示时间的某一点、某一时刻或年龄等用at: I get up at six in the morning. 我早上六点钟起床。 He got married at the age of 25. 他25 岁结婚。 ②泛指一般意义的上午、下午或晚上以及月或年等较长的时间,一般用in:We watch TV in the evening. 我们晚上看电视。 He went to Japan in 1946. 他于1946 去了日本。 ③若表示星期几或某一特定的日期,则用on: He left here on the fifth of May. 他于5 月5 日离开这儿。 2. 表示地点、场所、位置等,注意以下用法: ①表示某一点位置,用at: We live at No 87 Beijing Road. 我们住在北京路87 号。 The hospital is at the end of the street. 医院在这条街的尽头。 与名词所有格连用表示地点,也用at。如: at my sister’s 在我姐姐家 at the doctor’s 在医务室 ②表示空间或范围,用in: What’s in the box? 这盒子里有什么? He lives in Paris with his wife. 他同他妻子住在巴黎。 但有时两者可换用:
The meeting was held at [in] the hotel. 会议在宾馆举行。 ③at与in的另一个区别是:at多用于指较小的地方,而in多用于指较大的地方:in Shanghai 在上海at the station 在车站 ④介词on 用于地点,主要指在某物的表面: What’s on the table? 桌上有什么? There’s a wallet lying on the ground. 地上有个钱包。 【注】在少数搭配中,也用介词on: He works on a farm. 他在农场工作。 3. 在某些搭配中,三者的区别与英国英语和美国英语有关: in the street (英) / on the street (美) 在街上 in the road (英) / on the road (美) 在路上 in the team (英) / on the team (美) 在这个队 at the weekend (英) / on the weekend (美) 在周末 at weekends (英) / on weekends (美) 在周末 4. 有时三者的差别与搭配习惯和用法有关: in bed / on the bed 在床上 in the tree (多指树外之物) / on the tree (多指树本身之物) 在树上
《“的、地、得”的用法》语文微课教案 一、教学背景 在语言文字规范化大背景下,帮助学生解决应用“的地得”的疑惑与困难。 二、设计思路 针对学生对于“的地得”的误用与忽视展开教学,规范结构助词“的地得”的使用。按照“问题的提出、问题的分析、问题的解决”的思路展开教学,总结归纳优化的方式方法。 三、教学目标 1、知道“怎么样的什么、怎么样地干什么、干得怎么样”三种固定搭配。 2、掌握“的、地、得”的区别与联系。 3、运用小儿歌“动前土、名前白、行动后面双人来”的口诀帮助正确使用“的、地、得”。 四、教学重难点 1、知道“的、地、得”的区别。 2、在实际情境中正确运用“的、地、得”。 五、教学时间 8分钟微课堂 六、教学适用对象 义务教育九年制内的学生 七、教学准备
多媒体课件、录屏软件 八、教学设计与过程 开场白: 同学们好!今天我们一起来学习“的、地、得”的正确用法。首先我们来了解一下它们的区别。 1、相同之处:原来它们都是念轻声“de”,都是结构助词,起连接作用。 2、不同之处:在书面语中要写成三个不同的字,而且它们的搭配及用法也各不相同。 (1)怎么样的什么 (2)怎样样地干什么 (3)干得怎么样 下面我们就来学习一下它们的正确用法。 白勺“的”的结构是用“形容词或名词或代词+的+名词”来表示,而我们最常见,用得最多的还是“形容词+的+名词”的结构。 而土也“地”的用法可以用“形容词+地+动词”的结构来表示。 双人“得”是用“动词+得+形容词”的结构来表示 3、练习巩固 (1)形近区分 静静(的)河面静静(地)写字欢乐(的)山谷
欢乐(地)歌唱满意(地)点头满意(的)作品 (2)类别区分 1)跑(得)飞快飞快(地)跑 2)愉快(的)旅行旅行(得)愉快 3)强烈(的)渴望强烈(地)渴望 (3)综合杂糅 小雏鹰飞到大树的上方,高兴地喊起来:“我真的会飞啦!而且飞(得)很高呢!” 小结:能填对这个句子的你肯定就已经学会它们的用法了! 4、特殊情况 质疑:假如遇到特殊情况怎么办呢? 我从书包里拿出书交给她们,她们高兴得.围着我跳起舞来。(出自二年级上册《日记两则》) (1)质疑:为什么这里要使用“得”呢? (2)释疑:原来这里强调的是心情,动词在后,形容词在前,相当于后置,“得”修饰“跳舞”而非“围”。现在你明白了吧? 5、小结归纳: 怎么样,你们学会了吗?为了让同学们能够更快的记住它们的用法,老师送给大家一首口诀来帮助你们熟记三个“的”的正确使用方法:动前土、名前白、行动后面双人来。
一动词加-ing 的情况 consider, suggest/advise,look forward to, excuse/pardon admit,delay/put off,fancy avoid,miss,keep/keep on,practise deny,finish,enjoy/appreciate forbid,imagine,risk can't help,mind,allow/permit,escape 考虑建议盼原谅, 承认推迟没得想. 避免错过继续练, 否认完成就欣赏. 禁止想象才冒险, 不禁介意准逃亡. 如:建议:advise,suggest,冒险:risk,献身:devote oneself to 二动词后加doing 和加to do sth. 意思不一样的情况 ①remember doing指记住过去做过的事,remember to do指记住将来要做的事,表示“不要忘记”。 ②forget doing表示忘记过去做过的事,forget to do表示“没有想起做某事”。 ③mean doing表示“意味着做某事”,mean to do表示“打算做某事”。 ④regret doing表示对已做过的事感到后悔,regret to do表示对将要做的事表示遗憾。 ⑤stop doing表示“停止做某事”,stop to do是停止做正在做的事以便去做另外一件事,这里的to do不是stop的宾语而是stop的目的状语。 ⑥try doing表示“尝试做某事”,try to do表示“设法、试图做某事”。 ⑦go on doing表示继续做同一件事,go on to do表示做完一件事后,接下去做另外一件事。 三动词后加to do sth. afford负担得起agree同意appear似乎,显得arrange安排 ask问attempt企图beg请求begin开始 choose选择claim要求decide决定demand要求 desire愿望determine决定expect期望fail不能 forget忘记happen碰巧hate憎恨,厌恶hesitate犹豫 hope希望intend想要learn学习long渴望 love爱manage设法mean意欲,打算need需要 neglect忽视offer提供omit忽略,漏other扰乱;烦恼
定冠词the的用法: 定冠词the与指示代词this ,that同源,有“那(这)个”的意思,但较弱,可以和一个名词连用,来表示某个或某些特定的人或东西. (1)特指双方都明白的人或物 Take the medicine.把药吃了. (2)上文提到过的人或事 He bought a house.他买了幢房子. I've been to the house.我去过那幢房子. (3)指世界上独一无二的事物 the sun ,the sky ,the moon, the earth (4)单数名词连用表示一类事物 the dollar 美元 the fox 狐狸 或与形容词或分词连用,表示一类人 the rich 富人 the living 生者 (5)用在序数词和形容词最高级,及形容词等前面 Where do you live?你住在哪? I live on the second floor.我住在二楼. That's the very thing I've been looking for.那正是我要找的东西. (6)与复数名词连用,指整个群体 They are the teachers of this school.(指全体教师) They are teachers of this school.(指部分教师) (7)表示所有,相当于物主代词,用在表示身体部位的名词前 She caught me by the arm.她抓住了我的手臂. (8)用在某些有普通名词构成的国家名称,机关团体,阶级等专有名词前 the People's Republic of China 中华人民共和国 the United States 美国 (9)用在表示乐器的名词前 She plays the piano.她会弹钢琴. (10)用在姓氏的复数名词之前,表示一家人 the Greens 格林一家人(或格林夫妇) (11)用在惯用语中 in the day, in the morning... the day before yesterday, the next morning... in the sky... in the dark... in the end... on the whole, by the way...
pretend三种易混淆不定式的用法 今天给大家带来了pretend三种易混淆不定式的用法,我们一起来学习吧,下面就和大家分享,来欣赏一下吧。 pretend三种易混淆不定式的用法 1. pretend to do sth .这个短语的意思是假装(将要)去做什么事情,适用于将来时态动作将来假装要去做但不一定去做的状态。 举例: If youpretend to know what you dont know,youll only make afool of yourself.不懂装懂就会闹笑话。(suri的回答) Child pretend to be mother and father in kindergarten.孩子在幼稚园里面假扮父亲和母亲(表将来)(JasoOon的回答) 2. pretend to have done sth .这个短语的意思是假装已经做过了某事,强调事情的一个完成的状态,侧重于假装的事情已经做好了。 举例:I pretend tohave seen nothing,but I cant.我假装自己没有看到任何东西,但是我做不到(侧重于一个完成时态,已经试图去假装没有看到)
she pretended to have finished the homeworkwhen she went out and played.当她出门玩的时候她假装自己已经完成了家庭作业。(假装做作业这个动作已经在出门玩之前做完了)(JasoOon的回答)以及怀陌的回答:When the teacher came in,he pretended to havefinished the homework.当老师进来的时候他假装自己已经完成家庭作业了,两者有异曲同工之妙。 3. pretendtobe doing sth 这个短语的意思是假装正在做某事,强调动作的一个进行时态。 举例:They pretend to be reading books when the teacher sneakingly stands at the back door.当老师偷偷地站在后门的时候他们假装正在读书(读书与老师站在后门都是过去进行时 态)(JasoOon的回答) Asmanypeople do,youoftenpretend to be doingwork when actuallyyou arejust wasting time online.像很多人一样,你经常假装正在工作,其实是在上网。 群主补充:昨天和今天已提交作业的同学,做得都很好,全部授予小红花。希望你们再接再厉,不要松懈哟。所以下周一出题者为所有已提交作业的同学或者你们选出的代表。
“theway+从句”结构的意义及用法 首先让我们来看下面这个句子: Read the followingpassageand talkabout it wi th your classmates.Try totell whatyou think of Tom and ofthe way the childrentreated him. 在这个句子中,the way是先行词,后面是省略了关系副词that或in which的定语从句。 下面我们将叙述“the way+从句”结构的用法。 1.the way之后,引导定语从句的关系词是that而不是how,因此,<<现代英语惯用法词典>>中所给出的下面两个句子是错误的:This is thewayhowithappened. This is the way how he always treats me. 2.在正式语体中,that可被in which所代替;在非正式语体中,that则往往省略。由此我们得到theway后接定语从句时的三种模式:1) the way+that-从句2)the way +in which-从句3) the way +从句 例如:The way(in which ,that) thesecomrade slookatproblems is wrong.这些同志看问题的方法
不对。 Theway(that ,in which)you’re doingit is comple tely crazy.你这么个干法,简直发疯。 Weadmired him for theway inwhich he facesdifficulties. Wallace and Darwingreed on the way inwhi ch different forms of life had begun.华莱士和达尔文对不同类型的生物是如何起源的持相同的观点。 This is the way(that) hedid it. I likedthe way(that) sheorganized the meeting. 3.theway(that)有时可以与how(作“如何”解)通用。例如: That’s the way(that) shespoke. = That’s how shespoke.
“的、地、得”的用法教案 教学目标: 1.能通过看视频知道“的、地、得”的用法区别。 2.能在小组合作中正确掌握“的、地、得”的用法。 3.能正确熟练地运用“的、地、得”。 教学重点:通过看视频知道“的、地、得”的用法区别。 教学难点:正确熟练地运用“的、地、得”。 教学过程: 一、导入(板书课题:“的、地、得”的用法“的、地、得”) 这三个字认识吧!虽然它们都有一个相同的读音de,但用法却不一样,可不能把他们用错了。究竟他们的用法有什么不同,我们来听听他们的故事吧! 二、看微视频,学习“的、地、得”的用法区别。 三、小结: 1.孩子们,刚才看了视频知道他们是谁吗?(白勺的,土也地,双人得。) (1)白勺的是个杂货铺老板,她的店里都有什么?(彩色的毛巾美味的汉堡结实的帐篷舒适的儿童车捕捉风的网会唱歌的小树开个没完的花朵优美动听的歌曲飘来飘去的云……)还可能有什么? 你们一定会发现,白勺的的用法有什么特点?(后面是名词。)板书:名词 (2)土也地是个运动男孩,他喜欢?(悠闲地散步欢快地跳舞兴奋地跳跃开心地捕蝴蝶看图书踢球骑自行洗澡吃冰淇淋……)他还可能喜欢干什么呢?你发现了吗?土也地的用法特点?(后面是动词。)板书:动词 (3)双人得呢?她是个总喜欢评价别人的小妹妹。(球踢得真棒舞跳得精彩长得好高呀……) 她可能还怎么评价别人?(歌唱得动听饭吃得很饱人长得漂亮)你们会发现,双人得的前面通常都是——动词。板书:动词 2.小结:所以,他们的用法也很简单,区别就在这里。 (白勺的用在名词前面;土也地用在动词前面;双人得用在动词后面。)你明白了吗? 四、我来考考你们,看哪一组完成得又对又快! 1.菜鸟级练习 2.老鸟级练习 3.大虾级练习 五、总结
表示“方式”、“方法”,注意以下用法: 1.表示用某种方法或按某种方式,通常用介词in(此介词有时可省略)。如: Do it (in) your own way. 按你自己的方法做吧。 Please do not talk (in) that way. 请不要那样说。 2.表示做某事的方式或方法,其后可接不定式或of doing sth。 如: It’s the best way of studying [to study] English. 这是学习英语的最好方法。 There are different ways to do [of doing] it. 做这事有不同的办法。 3.其后通常可直接跟一个定语从句(不用任何引导词),也可跟由that 或in which 引导的定语从句,但是其后的从句不能由how 来引导。如: 我不喜欢他说话的态度。 正:I don’t like the way he spoke. 正:I don’t like the way that he spoke. 正:I don’t like the way in which he spoke. 误:I don’t like the way how he spoke. 4.注意以下各句the way 的用法: That’s the way (=how) he spoke. 那就是他说话的方式。 Nobody else loves you the way(=as) I do. 没有人像我这样爱你。 The way (=According as) you are studying now, you won’tmake much progress. 根据你现在学习情况来看,你不会有多大的进步。 2007年陕西省高考英语中有这样一道单项填空题: ——I think he is taking an active part insocial work. ——I agree with you_____. A、in a way B、on the way C、by the way D、in the way 此题答案选A。要想弄清为什么选A,而不选其他几项,则要弄清选项中含way的四个短语的不同意义和用法,下面我们就对此作一归纳和小结。 一、in a way的用法 表示:在一定程度上,从某方面说。如: In a way he was right.在某种程度上他是对的。注:in a way也可说成in one way。 二、on the way的用法 1、表示:即将来(去),就要来(去)。如: Spring is on the way.春天快到了。 I'd better be on my way soon.我最好还是快点儿走。 Radio forecasts said a sixth-grade wind was on the way.无线电预报说将有六级大风。 2、表示:在路上,在行进中。如: He stopped for breakfast on the way.他中途停下吃早点。 We had some good laughs on the way.我们在路上好好笑了一阵子。 3、表示:(婴儿)尚未出生。如: She has two children with another one on the way.她有两个孩子,现在还怀着一个。 She's got five children,and another one is on the way.她已经有5个孩子了,另一个又快生了。 三、by the way的用法
英语语法顺口溜(巧记). 英语学习 动词为纲“滚雪球” 难易编组抓循环 同类归纳印象深图示介词最直观 混淆多因形音义反义词语成对念 构词方法不可忘习惯用语集中练 词不离句法最好课外阅读莫间断 be 的用法口诀 我用am,你用are,is连着他,她,它; 单数名词用is,复数名词全用are。 变疑问,往前提,句末问号莫丢弃。 变否定,更容易,be后not莫忘记。 疑问否定任你变,句首大写莫迟疑。 时间名词前所用介词的速记歌 年月周前要用in,日子前面却不行。 遇到几号要用on,上午下午又是in。 要说某日上下午,用on换in才能行。 午夜黄昏须用at,黎明用它也不错。 at也用在明分前,说“差”可要用上to, 说“过”只可使用past,多说多练牢牢记, 莫让岁月空蹉跎。 记住f(e)结尾的名词复数 妻子持刀去宰狼,小偷吓得发了慌; 躲在架后保己命,半片树叶遮目光。 巧记48个国际音标 单元音共十二,四二六前中后。 双元音也好背,合口集中八个整。 辅音共计二十八,八对一清又七浊, 四个连对也包括。有气无声清辅音, 有声无气浊辅音,发音特点应掌握。 非谓语动词的一些特殊用法后只接不定式作宾语的一些常用特殊谓语动词动词后,不定式,want, hope和wish, agree, decide, mean, manage, promise, expect, pretend,且说两位算在此, 要记牢,要记住,掌握它们靠自己。
英语学习小窍门 后接动词不定式做宾语补足语省略不定式符号“to”的一些常用特殊动词 一些动词要掌握,have, let和make, 此三动词是使役,“注意”“观察”“听到”see, 还有feel和watch,使用它们要仔细, 后接“宾补”略去“to”,此点千万要牢记 除此之外,还可以掌握“八字言”, 一感feel,二听hear, listen to, 三让have, let, make,四看see, look at, observe, watch 后只接动名词做宾语的一些常用特殊动词 特殊动词接“动名”,使用它们要记清, “放弃”“享受”可“后悔”, “坚持”“练习”必“完成”, “延期”“避免”非“介意” 掌握它们今必行。 动名词在句中的功能及其它 “动名”语法其功能,名词特征有动、形,主宾表定都可作,“动名”、“现分”要认清,“现分”不作“宾”和“主”, 动名作“状”可不行。二词皆可作定语,混为一谈不允许,主谓关系视分词,“动名”一词无此义。 现在分词形式及在句子中的作用(包括过去分词的作用): 现在分词真好记,动词后面ING。它的作用真不小,可以充当定状表。 还有宾语补足语,忘记此项不可以。 分词做定语的位置及其它 “定分”位置有二条,词前词后定分晓。 单个分词在词前,有时此规有颠倒。 分词短语在词后,“定从”和它互对照。 “现分”动作进行时,“过分”动作完成了。 (注:“定分”:做定语的分词;“定从”:定语从句;“现分”:现在分词;“过分”:过去分词。) 分词做状语在句子中所表示的意义 分词做状语,概有七意义。“ 时间”和“原因”,“结果”与“目的”。 “方式”加“伴随”,“条件”常出席。 且谈其主语,谓语头前的*。 欲要记住它,必须常练习。(*指句子的主语)