青少年机器人技术等级考试理论综合试卷(三级)
分数:100 题数:30
一、单选题(共20题,共80分)
1.Arduino UNO主控板数字信号引脚的工作模式,下列说法正确的是?
A. 有数字信号输入模式、数字信号输出模式两种
B. 有数字信号输入模式、数字信号输出模式、内部下拉数字信号输入模式三种
C. 有数字信号输入模式、数字信号输出模式、内部上拉数字信号输入模式三种
D. 有高电平模式、低电平模式两种
试题编号:20200604154028957
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:A
考生得分:0
是否评分:已评分
评价描述:
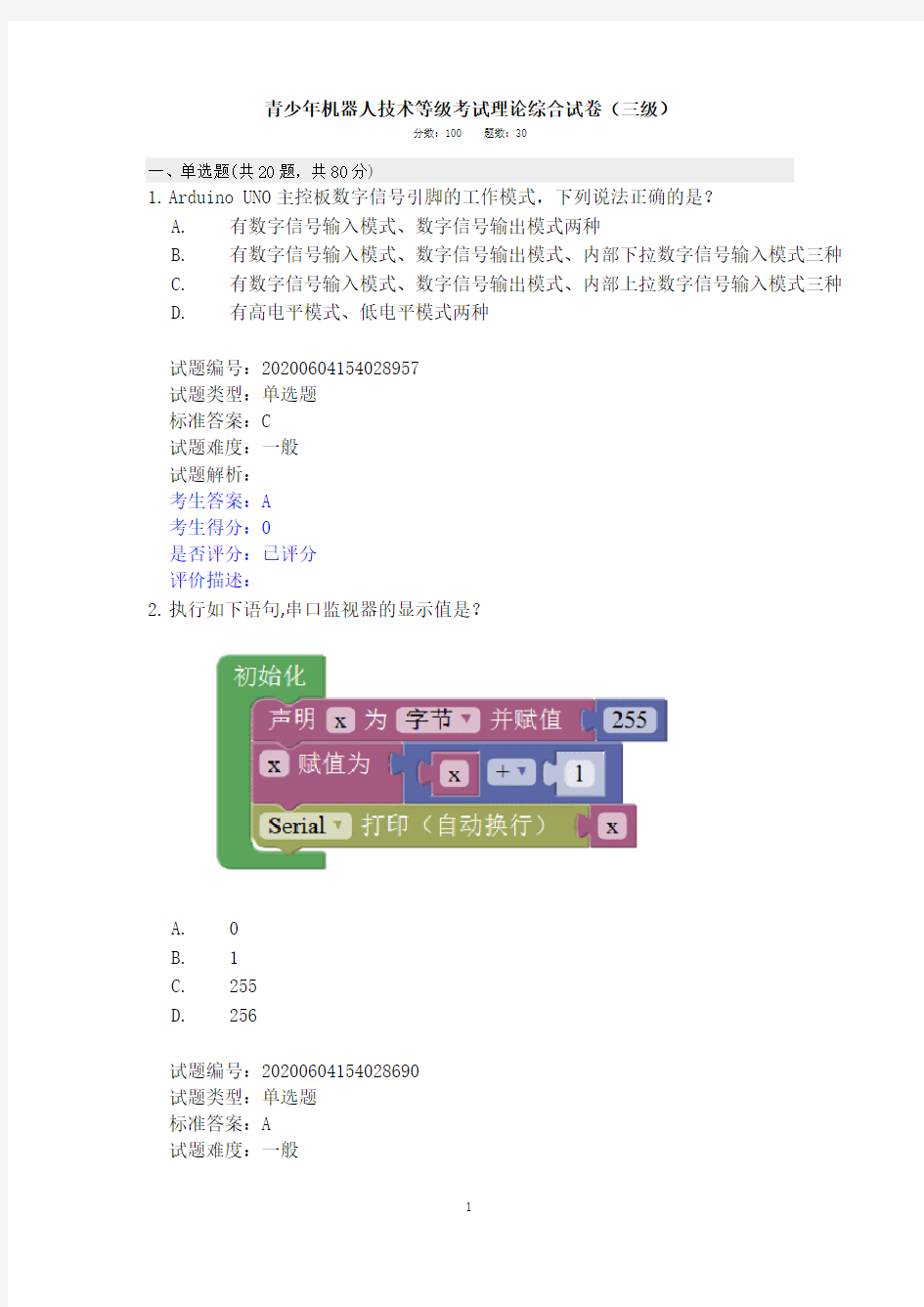
2.执行如下语句,串口监视器的显示值是?
A. 0
B. 1
C. 255
D. 256
试题编号:20200604154028690
试题类型:单选题
标准答案:A
试题难度:一般
试题解析:
考生答案:A
考生得分:4
是否评分:已评分
评价描述:
3.在我们的日常生活中接触过许多家用电器,比如电灯、电冰箱、洗衣机、电脑等,家用电器之
A. 都是串联
B. 都是并联
C. 可以串联,也可以是并联
D. 多盏电灯应该是串联,电脑与电冰箱等应该并联
试题编号:20200604154028596
试题类型:单选题
标准答案:B
试题难度:
试题解析:
考生答案:B
考生得分:4
是否评分:已评分
评价描述:
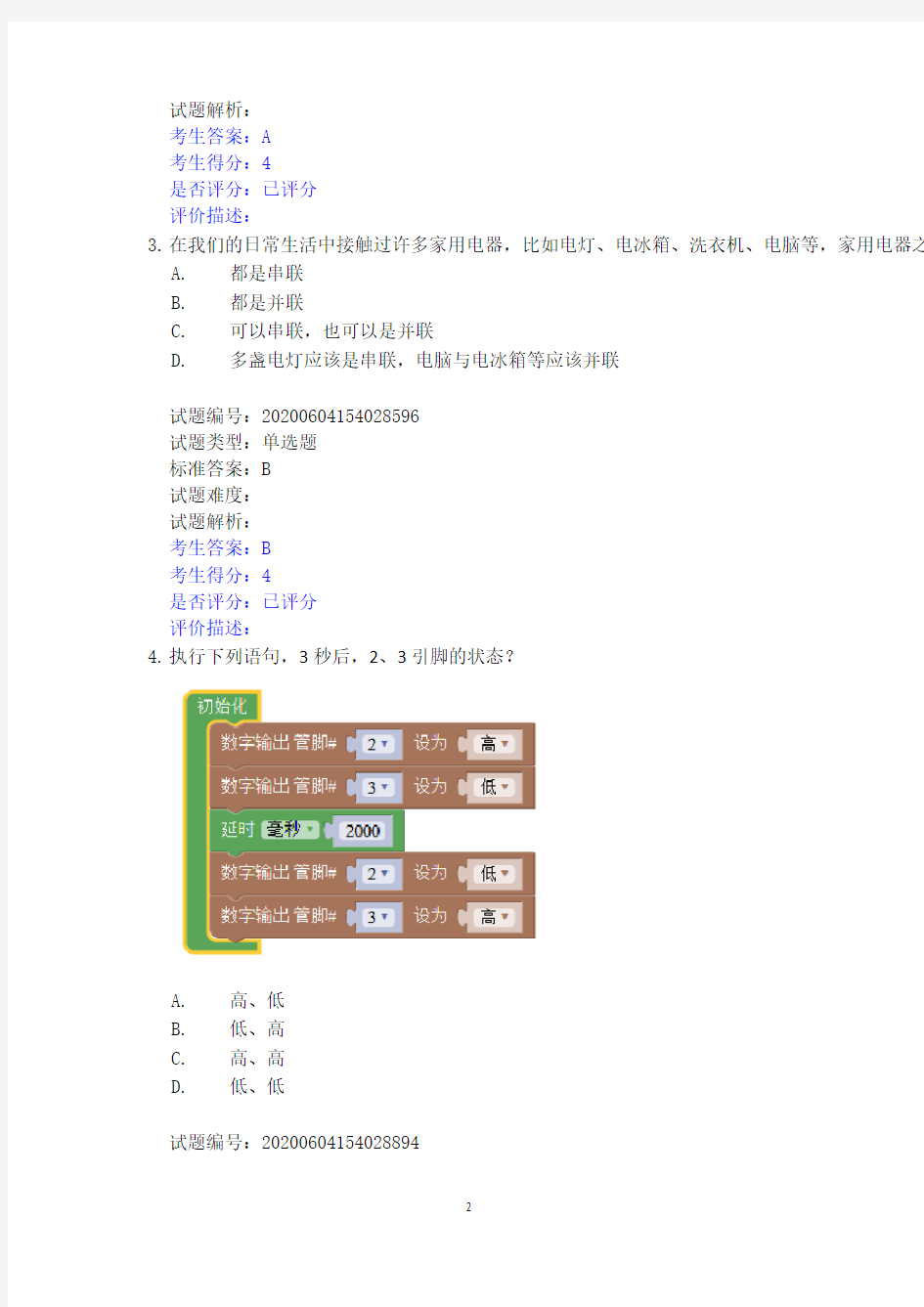
4.执行下列语句,3秒后,2、3引脚的状态?
A. 高、低
B. 低、高
C. 高、高
D. 低、低
试题编号:20200604154028894
试题类型:单选题
标准答案:B
试题难度:一般
试题解析:
考生答案:A
考生得分:0
是否评分:已评分
评价描述:
5.读取电路中按键的返回值时,使用下列哪个模块?
A.
B.
C.
D.
试题编号:20200604154028847
试题类型:单选题
标准答案:A
试题难度:一般
试题解析:
考生答案:B
考生得分:0
是否评分:已评分
评价描述:
6.
对此模块描述正确的是?
A. 此模块一共循环1次
B. 此模块一共循环4次
C. 此模块一共循环5次
D. 此模块一共循环6次
试题编号:20200604154028738
试题类型:单选题
标准答案:C
试题难度:
试题解析:
考生答案:C
考生得分:4
是否评分:已评分
评价描述:
7.下列流程图中,没有选择结构语句的是?
A.
B.
C.
试题编号:20200604154028721试题类型:单选题
标准答案:A
试题难度:一般
试题解析:
考生答案:C
考生得分:0
是否评分:已评分
评价描述:
8.下列电路中,属于串联电路的有?
A.
B.
C.
D.
试题编号:20200604154028941
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:A
考生得分:0
是否评分:已评分
评价描述:
9.电压过高会对人体造成伤害,经验表明人体安全电压不得高于?
A. 220V
B. 36V
C. 12V
D. 5V
试题编号:20200604154028565
试题类型:单选题
标准答案:B
试题难度:
试题解析:
考生答案:B
考生得分:4
是否评分:已评分
评价描述:
10.在常温情况下,下列物体属于绝缘体的是?
A. 石墨
B. 普通橡胶
C. 水银
D. 潮湿的木头
试题编号:20200604154028612
试题类型:单选题
标准答案:B
试题难度:
试题解析:
考生答案:B
考生得分:4
是否评分:已评分
评价描述:
11.利用光敏电阻传感器向Arduino模拟输入A3口发送信息,下列值可能是返回值的是?
A. -128
B. 256
C. -52
D. 1024
试题编号:20200604154028910
试题类型:单选题
标准答案:B
试题难度:
试题解析:
考生答案:B
考生得分:4
是否评分:已评分
评价描述:
12.下图是一个按键控制LED灯的电路连接图,和对应的程序。当按键断开和闭合时,LED灯的状
A. 亮灭
B. 灭亮
C. 不确定灭
D. 灭灭
试题编号:20200604154028879
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:B
考生得分:0
是否评分:已评分
评价描述:
13.下图程序运行结束后,串口监视器显示的x的数值是多少?
A. 0
B. 1
C. 10
D. 无结果
试题编号:20200604154028674
试题类型:单选题
标准答案:D
试题难度:一般
试题解析:
考生答案:C
考生得分:0
是否评分:已评分
评价描述:
14.LED灯连接D3引脚,下图所示是通过光敏电阻控制LED灯亮度的电路和程序,当光敏电阻上的
亮度()。
A. 不变
B. 变亮
C. 变暗
D. 闪烁
试题编号:20200604154028784
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:C
考生得分:4
是否评分:已评分
评价描述:
15.下图程序运行结束后,串口监视器显示的x的数值是多少?
A. 0
B. 1
C. 11
D. 12
试题编号:20200604154028643
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:C
考生得分:4
是否评分:已评分
评价描述:
16.执行以下语句后x,y,z的值是?
A. x=10,y=40,z=30
B. x=10,y=50,z=40
C. x=10,y=20,z=30
D. x=50,y=30,z=10
试题编号:20200604154028753
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:C
考生得分:4
是否评分:已评分
评价描述:
17.下列关于电阻叙述正确的是?
A. 电路两端的电压越大,电路中的电阻就越大
B. 通过导体的电流强度减小,导体的电阻就增大
C. 导体的电阻跟电压成正比,跟电流强度成反比
D. 导体的电阻表示导体对电流阻碍的性质,不随电压、电流的改变而改变
试题编号:20200604154028627
试题类型:单选题
标准答案:D
试题难度:
试题解析:
考生答案:B
考生得分:0
是否评分:已评分
评价描述:
18.理想二极管的反向电阻为?
A. 0Ω
B. 无穷大
C. 约1KΩ
D. 220Ω
试题编号:20200604154028800
试题类型:单选题
标准答案:B
试题难度:
试题解析:
考生答案:C
考生得分:0
是否评分:已评分
评价描述:
19.Arduino UNO或Nano主控板,通过电位器旋转控制舵机的角度程序运行,下列说法不正确的是
A. 电位器连接在A1引脚,舵机连接在A0引脚
B. 电位器从一端旋转至另外一端时,舵机的角度在45度和135之间变化
C. 当电位器转动到中间位置时,舵机停留在45度
D. 程序中通过变量potVal分别保存电位器的返回值和映射后的角度
试题编号:20200604154028926
试题类型:单选题
标准答案:C
试题难度:一般
试题解析:
考生答案:C
考生得分:4
是否评分:已评分
评价描述:
20.Arduino UNO主控板采用的是ATmega328P-PU处理器,该处理器的主频为?
A. 4MHz
B. 8MHz
C. 16MHz
D. 32MHz
试题编号:20200604154028817
试题类型:单选题
标准答案:C
试题难度:
试题解析:
考生答案:B
考生得分:0
是否评分:已评分
评价描述:
二、多选题(共5题,共10分)
21.Arduino UNO主控板,下列同时具有数字信号输入、输出和模拟信号输入的引脚有?
A. 3
B. 5
C. A4
D. A5
试题编号:20200604154028977
试题类型:多选题
标准答案:C|D
试题难度:一般
试题解析:
考生答案:A|B
考生得分:0
是否评分:已评分
评价描述:
22.下列模块中,属于选择结构的模块有哪些?
A.
B.
C.
D.
试题编号:20200604154029062
试题类型:多选题
标准答案:A|B
试题难度:
试题解析:
考生答案:B|A
考生得分:2
评价描述:
23.关于PWM,以下说法不正确的有?
A. 当占空比为10%是,等效输出电压为4.5V
B. 可以利用PWM管脚实现模拟信号输入
C. PWM是指在数字系统中,通过调整占空比来实现模拟输出
D. UNO主控板,A0-A5管脚具有PWM模拟输出功能
试题编号:20200604154029002
试题类型:多选题
标准答案:A|B|D
试题难度:
试题解析:
考生答案:D|C
考生得分:0
是否评分:已评分
评价描述:
24.如图所示的电路中,下列说法正确的是?
A. 电流表A1测量的是通过灯L1的电流
B. 电流表A2测量的是通过灯L2的电流
C. L1和L2两端的电压是相同的
D. A2测量的是干路的电流
试题编号:20200604154029015
试题类型:多选题
标准答案:A|B|C|D
试题难度:一般
试题解析:
考生答案:A|B|C
考生得分:0
评价描述:
25.
对于这个模块,下列说法正确的是?
A. 属于逻辑符号模块
B. 此模块可以实现两边条件只要有一个成立,则整体为“真”
C. 此模块的作用是可以实现两边条件要全都成立,则整体为“真”
D. 此模块为逻辑非模块
试题编号:20200604154029047
试题类型:多选题
标准答案:A|B|C
试题难度:
试题解析:
考生答案:B|A
考生得分:0
是否评分:已评分
评价描述:
三、判断题(共5题,共10分)
26.旋转电位器模块和按键模块都属于模拟输入传感器。
正确错误
试题编号:20200604154029140
试题类型:判断题
标准答案:错误
试题难度:
试题解析:
考生答案:正确
考生得分:0
是否评分:已评分
评价描述:
27.变量的值在程序中不可以发生改变。
正确错误
试题编号:20200604154029156
试题类型:判断题
标准答案:错误
试题难度:
试题解析:
考生答案:错误
考生得分:2
是否评分:已评分
评价描述:
28.导体两端电压为0时,导体的电阻也为0。
正确错误
试题编号:20200604154029109
试题类型:判断题
标准答案:错误
试题难度:
试题解析:
考生答案:正确
考生得分:0
是否评分:已评分
评价描述:
29.在电路搭接过程中,只要操作认真,短路对电路是没有影响的。
正确错误
试题编号:20200604154029093
试题类型:判断题
标准答案:错误
试题难度:一般
试题解析:
考生答案:错误
考生得分:2
是否评分:已评分
评价描述:
30.并联电路中,各支路电流与电阻成反比。
正确错误
试题编号:202006041540290001
试题类型:判断题
标准答案:正确
试题难度:一般
试题解析:
考生答案:正确
考生得分:2
是否评分:已评分
评价描述:
全国青少年机器人技术等级考试20180317理论题 一、单选题(共30题,每题2分,共60分) 1.电压的单位是? A.安培 B.欧姆 C.法拉 D.伏特 2.下列四组物体中,都属于绝缘体的一组是? A.水银、铜丝、铁块 B.陶瓷、于木、塑料 C.碳棒、人体、大地 D.大地、人体、陶瓷 3、执行如下语句,串口监视器的显示值是 A.255 B.1 C.0 D.256 4.二极管的导通条件是所给电压U要满足? A. U>O B.U>截止电压 C.U>导通电压 D.U>击穿电压 5.如图所示的电路中,哪个电路是正确的? 6.此模块的作用是?
A. 延时10秒钟 B.延时10毫秒 C.蜂鸣器发出声音10秒钟 D.电机转动10毫秒 7.一个并联电路并联了3个灯泡,测得电源两边的电压为3V,则通过每个灯泡的电压为? A.3V B. 1V C.6V 8.关于电流和电源,下列说法正确的是? A.电流是由电荷做无规则运动形成的 B.在电源的外部,电流从电源的正极流向电源的负极 C.电路中只要有电源,就一定有电流 D.金属导体中的电流方向与电子移动的方向相同 9.下列说法正确的是? A.编程语言只有C语言一种 B.机器人无程序也可正常运行 C.算法就是为解决一个问题而采取的方法和步骤 D.if语句结构属于顺序结构 10.2017年,战胜围棋选手柯洁的机器人的名称是? A. AlphaGo B. ASIMO C. Watson D. Bigdog 11.三极管的电极不包括哪一个? A.发射极 B.基极 C.接收极 D.集电极 12.程序中的高电平一般用()来表示。 A.0或1 B.0 C.1 D.以上选项都不对 13.通过人体的最大安全电压为? A.380V B.1.5V C.220V D.36V 14. 串联电路中,保持电路两端的电压不变,加大电路中的电阻的阻值,则电路中的电流如何? A.不变 B.变小 C.变大 D.不确定 15.运算符逻辑或的符号为? A.“&&” B. “!” C. “&” D. “||” 16.二极管之所以被称为“半导体”是因为它具有什么特性? A.有两个引脚 B.双向导电性 C.单向导电性D导电性 17.马路上的路灯总一起亮,一起灭,如果它们其中一一盏灯的灯丝断了,其它灯仍正常发光,长据这这些现象判断路灯是?
2020 年全国青少年机器人技术等级考试一级 A 卷 一、单选题(每题 2 分,共 60分) 1. 下列人物形象中,哪一个是机器人?( ) C. D. 答案: D 2. 下列多边形中,最稳定的多边形是( ) 答案: A 3. 为了省力应该使用下面哪一种杠杆( ) C. 阻力臂与动力臂相等的杠杆 D. 无法判断 答案: B 4. 机器人的英文单词是( ) A. botre B.boret C.robot D.rebot 答案: C 5. 人们利用斜面搬运重物是为了( ) B. B. C. D. A. 阻力臂比动力臂长的杠杆 B. 动力臂比阻力臂长的杠杆 A.
A. 省力 B. 费力 C. 少移动距离 D. 好玩 答案: A 答案: A 9. 下列关于定滑轮和动滑轮的描述,正确的是( A. 定滑轮和动滑轮都能省力 B. 定滑轮和动滑轮都能改变力的方向 C. 定滑轮能省力,动滑轮能改变力的方向 D. 定滑轮能改变力的方向,动滑轮能省力 答案: D 10. 使用轮轴时,下面说法中错误的是( A. 轮轴只能省力一半 B. 动力作用在轮上可以省力 C. 动力作用在轴上不能省力 6. 如下图所示,利用定滑轮匀速提升重物 G ,向三个方向拉动的力分别是 F1、F2、F3,三个力 的大小关系是( ) A.F1 最大 B.F2 最大 C.F3 最大 D. 一样大 答案: D 7. 以下说法中不正确的是( A. 人类智能是与生俱来的 B. 人工智能是人类赋予的 C. 机器人不属于人工智能 D.人工智能是模仿人类智能 答案: C A.1 号 B.2 8. 如下图 中,
机器人等级考试(一级) 姓名: 答案解析 您的姓名:* 您的回答:姓名 1.下列人物形象中,哪个是机器人?() [分值:2]您的回答:C. (得分:2) 2.以下哪个是螺丝杆?() [分值:2] 您的回答:B. (得分:2)
3.下图中哪个实物运用到四边形原理?() [分值:2] 您的回答:B. (得分:2) 4.下图中哪个是等臂杠杆?() [分值:2] 您的回答:A. (得分:2) 5.以下属于费力杠杆的一组是?() [分值:2] 您的回答:C. ②④(得分:2) 6.机器人驱动方式不包括?()[分值:2] 您的回答:B.水驱动(得分:2) 7.用斧头作砍木头的工作,是利用()能省力的原理。[分值:2] 您的回答:C.斜面(得分:2) 8.汽车轮胎上设置花纹的目的是?()[分值:2] 您的回答:D.让轮胎增加与地面之间的摩擦,防止打滑;(得分:2)
9.下列关于秋千说法正确的是?()[分值:2] 您的回答:B.秋千荡到最低点时动能最大(得分:2) 10.传动链和齿轮传动共有的特点是?()[分值:2] 您的回答:C.准确无误的传递动力(得分:2) 11.在杠杆结构中,杠杆绕着转动的固定点称为?()[分值:2] 您的回答:C.支点(得分:2) 12.下列图中那一组是齿轮传动装置?() [分值:2] 您的回答:B. (得分:2) 13.风扇通过什么原理为人们实现降温?()[分值:2] 您的回答:B.加速空气流通(得分:2) 14.如果想把玩具汽车的螺丝钉拧紧,首先选用那种工具最合适?()[分值:2] 您的回答:B.螺丝刀(得分:2) 15.是什么原因让我们能够在地面上行走?()[分值:2] 您的回答:C.因为我们的鞋与地面之间存在摩擦力(得分:2) 16.动滑轮实质是?()[分值:2] 您的回答:C.省力杠杆(得分:2) 17.以下不是由于重力产生的现象是?()[分值:2] 您的回答:D.我们在光滑的地板上推箱子,送开手时,箱子会自己移动一段距 离(得分:2) 18.下列是齿轮传动的缺点的是?()[分值:2] 您的回答:C.易损坏机械(得分:2) 19.有关轮轴描述正确的是?()[分值:2] 您的回答:B.轮轴是能连续转动的杆杠(得分:2)
全国青少年机器人技术等级考试 (一级)2017年全年真题集 全国青少年机器人技术等级考试(一级 [所属分类]:各种题型测试 1. 下列人物形象中,哪一个是机器人? A. B. C. D. 答案:D 题型:单选题 分数:2 2.车轮上有凹凸不平的花纹的作用是 A.装饰好看 B.增加摩擦力 C.省油耐用 D.乘坐舒适答案:B 题型:单选题 分数:2 3.下图中,沿着哪个斜面向上拉动小车最省力 A. B. C. D. 答案:D 题型:单选题 分数:2 4.使用滑轮组工作是因为它能 A.省力当但不能改变力的方向 B.能改变力的方向但不能省力 C.既能改变力的方向又能省力 D.以上答案都不对 答案:C 题型:单选题 分数:2 5.木工师傅使用斧头作为工具,是利用()能省力的原理。
A.滑轮 B.轮轴 C.斜面 D.杠杆 答案:C 题型:单选题 分数:2 6.当阻力点到支点的距离大于动力点到支点的距离时,杠杆 A.省力 B.费力 C.既不省力也不费力 D.以上答案都不对 答案:B 题型:单选题 分数:2 7.如下图中,动滑轮有()个。 A.1 B.2 C.3 D.0 答案:A 题型:单选题 分数:2 8.在山区常见到的盘山公路。修建盘山公路是利用我们所学的哪种简单机械 A.滑轮 B.杠杆 C.斜面 D.轮子 答案:C 题型:单选题 分数:2 9.关于简单机械,下列说法不正确的是 A.起重机的起重臂是一个杠杆 B.省力的机械一定会省距离 C.定滑轮、动滑轮和轮轴都是变形的杠杆 D.使用轮轴不一定会省力 答案:B 题型:单选题 分数:2 10.下列图片中,哪个不是机器人 A. B. C. D. 答案:D
全国青少年机器人技术等级考试班纳机器人授权培训介绍 全国青少年机器人技术等级考试是由中国电子学会发起的面向青少年机器人技术能力水平的社会化评价项目。中国电子学会是工业和信息化部直属事业单位,是中国科学技术协会的团体会员单位。 全国青少年机器人技术等级考试面向青少年群体的年龄为6-18周岁,学级为小学1年级至高中3年级。 全国青少年机器人技术等级考试设有独立的标准工作组、教材编写组和考试服务组。考试采用在线计算机考试与动手实际操作考试相结合的方式。考试标准汲取国内外高校的人才选拔标准,支持创客教育的实践与工程化理念,全面考察青少年在机构结构、电子电路、软件编程、智能硬件应用、传感器应用、通信等方面的知识能力和实践能力。 等级考试不指定任何机器人器材品牌型号,全面体现考试标准的
公正性、权威性与前沿性。 中文名 全国青少年机器人技术等级考试 外文名 QualificationCertifyforNationalYouthRoboticsLevelTest 全国青少年机器人技术等级考试项目说明 技术发展背景 机器人技术是当今全球工业现代化进程中必不可少的关键技术。国务院总理李克强在政府工作报告中提出,中国推动产业结构迈向中高端,要实施“中国制造2025”,坚持创新驱动、智能转型、强化基础、绿色发展,加快从制造大国转向制造强国。无论是“工业4.0”还是“中国制造2025”,都离不开机器人技术的研发、应用和推广。国务院总理李克强在2015年的政府工作报告中提出,中国推动产业结构迈向中高端,要实施“中国制造2025”,坚持创新驱动、智能转型、强化基础、绿色发展,加快从制造大国转向制造强国。
全国青少年机器人技术等级考试一年级练习题 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
全国青少年机器人技术等级考试一级练习题 转载自:全国青少年机器人技术等级考试网 一.单选题(20题,每个3分) 1.下列图片中,哪个不是机器人() A. B. C. D. 答案:D 2.机器人的英文单词是() 答案:C 3.机器人结构中,起着支撑作用的部件是() A.机座 B.机体 C.腰部 D.臂部 答案:A 4.以下说法中不正确的是() A.人类智能是与生俱来的 B.人工智能是人类赋予的 C.机器人不属于人工智能 D.人工智能是模仿人类智能 答案:C 5.下列多边形中,最稳定的多边形是() A. B. C. D. 答案:A 6.下面哪种结构放在地面上最容易倾倒() A. B. C. D. 答案:C 7.盘山公路总是修的弯弯曲曲,环绕山坡盘山而上,而不是从山下直通山顶,这是为了() A.美观 B.省距离 C.省力 D.经济 答案:C 8.如下图所示,利用定滑轮匀速提升重物G,向三个方向拉动的力分别是F1、F2、F3,三个力的大小关系是() 最大最大最大 D.一样大 答案:D 9.使用轮轴时,下面说法中错误的是() A.轮轴只能省力一半 B.动力作用在轮上可以省力 C.动力作用在轴上不能省力
D.使用轮半径与轴半径之比为2:1的轮轴时,可以省力一半(动力作用在轮上) 答案:A 10.下图中不属于滑轮组的是() A. B. C. D. 答案:C 11.如下图所示,人们可以很轻松的将水桶从水井中提出,是利用了()机器。 A.轮轴 B.滑轮 C.斜面 D.螺旋 答案:A 12.在你学过的简单机械中,正常使用时,既可能省力又可能费力的机械是() A.杠杆 B.动滑轮 C.定滑轮 D.滑轮组 答案:A 13.下图中,沿着哪个斜面向上拉动小车最省力() A. B. C. D. 答案:D 14.木工师傅使用斧头作为工具,是利用()能省力的原理。 A.滑轮 B.轮轴 C.斜面 D.杠杆 答案:C 15.使用下列简单机械,为了省力的是() A.龙舟比赛用的船桨 B.开瓶用的瓶起子 C.理发用的剪刀 D.旗杆顶的定滑轮答案;B 16.下列说法不正确的是() A.利用机械既可以减轻体力劳动,又可以提高工作效率 B.杠杆是一种简单的机械,杆的形状可以是直的,也可以是弯曲的 C.滑轮是属于杠杆变形的一种简单机械 D.以上说法均不正确 答案:D 17.关于力臂,下列说法正确的是() A.支点到动力作用点的距离叫动力臂 B.支点到阻力作用点的距离叫阻力臂 C.支点到力的作用线的垂直距离叫力臂 D.杠杆的力臂一定在杠杆之上 答案:C 18.关于轮轴的描述,下列说法正确的是() A.轮轴与杠杆没有任何关系 B.轮轴就是轮子 C.轮轴就是根轴
试卷编号:866153 试卷录入者:机器人包老师 试卷总分:100 出卷时间:2018-12-25 14:11 答题时间:30分钟 分数:100 题数:45 一、单选题(共30题,每题2分,共60分) 1.运算符逻辑与的符号为?[2分] A.& B.|| C.! D.&& 参考答案:D 2.如下图所示,当按键按下时,对A1引脚描述正确的是? [2分] A.应使用数字输入模块,并且A1返回高电平 B.应使用模拟输入模块,并且A1返回高电平 C.应使用模拟输入模块,并且A1返回低电平 D.应使用数字输入模块,并且A1返回低电平 参考答案:A 3.下列关于电流方向说法正确的是[2分] A.电流方向和电子运动的方向相同 B.电流方向是负电荷移动的方向。 C.在电路中,电流方向是从正极出发,通过用电器,回到负极。 D.在金属导线中,电流方向与自由移动的电荷运动方向相同。 参考答案:C 4.下列不是电流产生必要条件的是[2分] A.电路中必须有闭合回路,形成通路 B.必须具有能够自由移动的电荷 C.导体两端存在电压差。 D.必须具有能够自由移动的正电荷 参考答案:D 5.如下图所示,两端电压保持不变,电阻大小为5Ω,此时通过电阻的电流大小为1A;当我们将电阻更换阻值为Ω,这是通过电阻的电流为?
[2分] D.不确定 参考答案:B 6.下列定义变量正确的是?[2分] a=0; a=0;b=0; a#; 2a; 参考答案:A 7.此模块 可以实现[2分] A.在V0口的小灯点亮 B.调节VO口小灯的亮度 C.在A0口的小灯点亮 D.调节A0口小灯的亮度 参考答案:A 8.对于导体,说法正确的是?[2分] A.同种材料,相同长度的导体横截面积越大,电阻值越大 B.同种材料,相同横截面积的导体长度越长,电阻值越大 C.不同材质的导体,只要导体长度、横截面积相同,电阻值也相同 D.导体容易导电是因为导体内部一定有可以自由移动的正电荷 参考答案:B
机器人等级考试一共分为八级 1-2级:对应工业革命之后的机械时代; 3-4级:对应电子时代电子电路/机器人搭建; 5-6级:对应信息时代集成电路/通信/I2C总线/机械臂; 7-8级:与中国电子学会全国电子信息专业技术人员水平评价(QCEIT)体系衔接,进入电子信息专业人才序列。 “ 一级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一) 知识 1. 了解主流的机器人影视作品及机器人形象 2. 会分辨稳定结构和不稳定结构 3. 会计算齿轮组的变速比例 4. 能够区分省力杠杆和费力杠杆 5、能够区分那种滑轮会省力 6、了解链传动和带传动各自的优缺点 7、了解不同种类的齿轮 (二) 实践 1. 基本结构认知 2. 知道六种简单机械原理(杠杆,轮轴,滑轮,斜面,楔,螺旋) 3. 齿轮和齿轮比 4. 链传动和带传动 5. 机器人常用底盘(轮式和履带)
二级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一)知识 1.了解中国及世界机器人领域的重要历史事件 2.知道机器人领域重要的科学家 3.知道重要的机器人理论及相关人物 4.知道凸轮、滑杆、棘轮、曲柄等特殊结构在生活中的应用 (二)实践 1.使用电池盒类型的遥控器控制电机运转 2.能够连接独立的电池盒、开关以及电机 3.完成凸轮、滑杆、棘轮、曲柄、连杆等特殊结构模型制作 4.驱动电机完成一定任务 5.掌握如何区分不同的曲柄连杆机构 6.了解电机的工作原理 7.了解摩擦力的产生条件和分类 8.了解凸轮结构中从动件的运动轨迹 三级标准 考试科目:机器人常用知识、电子电路搭建 考试内容
(一)知识 1.掌握电流、电压、电阻、导体、半导体等概念 2.掌握串联、并联的概念 3.了解模拟量、数字量、I/O口输入输出等概念 4.了解电子电路领域的相关理论及相关人物 5.了解二极管特性 6.掌握程序的顺序、选择、循环三种基本结构 7.掌握程序流程图的绘制 8.掌握图形化编程软件的使用 9.掌握变量的概念和应用 10.了解函数的定义 (二)电子电路 1.掌握简单串联并联电路的连接 2.掌握搭建不同LED显示效果电路的内容 3.掌握处理按键类型的开关输入信号的内容 4.掌握使用光敏电阻搭建环境光线检测感应电路的内容 5.掌握通过可调电阻控制LED的亮度变化的内容 6.掌握控制蜂鸣器发声的内容 四级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一)知识 1.掌握数学(加减乘除)、比较(大于小于等于)及逻辑(与或非)运算
全国青少年机器人技术等级考试理论综合试卷(三级) 测试卷 一、单选题(共30题,每题2分,共60分) 正常情况下,程序中,当引脚4输入的电压为2.5V时,串 试题编号:8 试题类型:单选题 标准答案:D 试题难度:一般 试题解析: 考生答案: 考生得分:0 是否评分:已评分 评价描述: 2. 程序中的低电平一般用()来表示。 试题编号:5 试题类型:单选题 标准答案:A 试题难度:一般 试题解析: 考生答案: 考生得分:0
是否评分:已评分 评价描述: 试题编号:5 试题类型:单选题 标准答案:C 试题难度:一般 试题解析: 考生答案: 考生得分:0 是否评分:已评分 评价描述: 试题编号:1 试题类型:单选题 标准答案:B 试题难度:一般 试题解析: 考生答案: 考生得分:0 是否评分:已评分 评价描述: 5. 两节普通干电池并联后的电压为?
试题编号:7 试题类型:单选题标准答案:A 试题难度:一般试题解析: 考生答案: 考生得分:0 是否评分:已评分评价描述: 试题编号:4 试题类型:单选题标准答案:C 试题难度:一般试题解析: 考生答案: 考生得分:0 是否评分:已评分评价描述:
试题编号:7 试题类型:单选题标准答案:C 试题难度:一般试题解析: 考生答案: 考生得分:0 是否评分:已评分评价描述: 试题编号:1 试题类型:单选题标准答案:C 试题难度:一般试题解析: 考生答案: 考生得分:0 是否评分:已评分评价描述:
试题编号:8 试题类型:单选题 标准答案:A 试题难度:一般 试题解析: 考生答案: 考生得分:0 是否评分:已评分 评价描述: A. L1、L2、电压表都是并联 B. L1、L2、电压表都是串联 C. L1与L2串联,L1与电压表并联 D. L1与L2并联,L1与电压表串联 试题编号:1 试题类型:单选题 标准答案:C 试题难度:一般 试题解析: 考生答案: 考生得分:0 是否评分:已评分 评价描述: 关于超声波模块说法正确的是? 试题编号:2 试题类型:单选题
全国青少年机器人技术等级考试 考试试卷(一级) [所属分类]:各种题型测试 1. 下列人物形象中,哪一个是机器人? A. B. C. D. 答案:D 题型:单选题 分数:2 2.车轮上有凹凸不平的花纹的作用是 A.装饰好看 B.增加摩擦力 C.省油耐用 D.乘坐舒适答案:B 题型:单选题 分数:2 3.下图中,沿着哪个斜面向上拉动小车最省力 A. B. C. D. 答案:D 题型:单选题
分数:2 4.使用滑轮组工作是因为它能 A.省力当但不能改变力的方向 B.能改变力的方向但不能省力 C.既能改变力的方向又能省力 D.以上答案都不对 答案:C 题型:单选题 分数:2 5.木工师傅使用斧头作为工具,是利用()能省力的原理。 A.滑轮 B.轮轴 C.斜面 D.杠杆 答案:C 题型:单选题 分数:2 6.当阻力点到支点的距离大于动力点到支点的距离时,杠杆 A.省力 B.费力 C.既不省力也不费力 D.以上答案都不对答案:B 题型:单选题 分数:2 7.如下图中,动滑轮有()个。 A.1 B.2 C.3 D.0 答案:A 题型:单选题 分数:2
8.在山区常见到的盘山公路。修建盘山公路是利用我们所学的哪种简单机械 A.滑轮 B.杠杆 C.斜面 D.轮子 答案:C 题型:单选题 分数:2 9.关于简单机械,下列说法不正确的是 A.起重机的起重臂是一个杠杆 B.省力的机械一定会省距离 C.定滑轮、动滑轮和轮轴都是变形的杠杆 D.使用轮轴不一定会省力 答案:B 题型:单选题 分数:2 10.下列图片中,哪个不是机器人 A. B. C. D. 答案:D 题型:单选题 分数:2 11.在下列日常生活中用到的工具中,具有传动链的是 A.电视机 B.自行车 C.滑板车 D.缝纫机 答案:B 题型:单选题 分数:2 12.下列简单的机械中,既可以省力,同时又可以改变力的方向的是 A.定滑轮 B.动滑轮 C.斜面 D滑轮组
最新机器人等级考试要求 机器人等级考试一共分为八级 1-2级:对应工业革命之后的机械时代; 3-4级:对应电子时代电子电路/机器人搭建; 5-6级:对应信息时代集成电路/通信/I2C总线/机械臂; 7-8级:与中国电子学会全国电子信息专业技术人员水平评价(QCEIT)体系衔接,进入电子信息专业人才序列。“ 一级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一) 知识 1. 了解主流的机器人影视作品及机器人形象 2. 会分辨稳定结构和不稳定结构 3. 会计算齿轮组的变速比例 4. 能够区分省力杠杆和费力杠杆 5、能够区分那种滑轮会省力 6、了解链传动和带传动各自的优缺点 7、了解不同种类的齿轮 (二) 实践 1. 基本结构认知 2. 知道六种简单机械原理(杠杆,轮轴,滑轮,斜面,楔,螺旋) 3. 齿轮和齿轮比 4. 链传动和带传动 5. 机器人常用底盘(轮式和履带)
二级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一)知识 1.了解中国及世界机器人领域的重要历史事件 2.知道机器人领域重要的科学家 3.知道重要的机器人理论及相关人物 4.知道凸轮、滑杆、棘轮、曲柄等特殊结构在生活中的应用 (二)实践 1.使用电池盒类型的遥控器控制电机运转 2.能够连接独立的电池盒、开关以及电机 3.完成凸轮、滑杆、棘轮、曲柄、连杆等特殊结构模型制作 4.驱动电机完成一定任务 5.掌握如何区分不同的曲柄连杆机构 6.了解电机的工作原理 7.了解摩擦力的产生条件和分类 8.了解凸轮结构中从动件的运动轨迹 三级标准 考试科目:机器人常用知识、电子电路搭建 考试内容
精心整理 机器人等级考试(一级) 姓名: 答案解析 您的姓名:* 您的回答:姓名 1. ?? 2.以下哪个是螺丝杆?() ?? B.??? 3.下图中哪个实物运用到四边形原理?() ??[分值:2] 您的回答:B.???(得分:2) 4.下图中哪个是等臂杠杆?()
??[分值:2]您的回答:A.???(得分:2) 5.以下属于费力杠杆的一组是?() ?? ? 6. 7. ? 8. 9. 10.传动链和齿轮传动共有的特点是?() ??? 11. ??? 12.下列图中那一组是齿轮传动装置?() ??[分值:2] 您的回答:B.???(得分:2) 13.风扇通过什么原理为人们实现降温?()??[分值:2] 您的回答:B.加速空气流通???(得分:2) 14.如果想把玩具汽车的螺丝钉拧紧,首先选用那种工具最合适?()??[分值:2]您的回答:B.螺丝刀???(得分:2)
15.是什么原因让我们能够在地面上行走?()??[分值:2] 您的回答:C.因为我们的鞋与地面之间存在摩擦力???(得分:2) 16.动滑轮实质是?()??[分值:2] 您的回答:C.省力杠杆???(得分:2) 17.以下不是由于重力产生的现象是?()??[分值:2] 您的回答:D.我们在光滑的地板上推箱子,送开手时,箱子会自己移动一段距离???(得分:2) 18.下列是齿轮传动的缺点的是?()??[分值:2] 您的回答:C.易损坏机械???(得分:2) 19. 20.下列哪种形状稳定性较好?() ??2] 21. ? 22.以下生活中的物品,属于费力杠杆的是?() ??[分值:2]您的回答:C.???(得分:2) 23.关于定滑轮的描述错误的是?()??[分值:2] 您的回答:A.定滑轮可以省力???(得分:2) 24.下列哪个滑轮组最省力?()
一、单选题(共20题,共80分) Arduino UNO/Nano主控板,下列程序模块返回值的最大值为?()1. 试题编号:20200828135038059 试题类型:单选题 标准答案:A 试题难度:一般 试题解析: 考生答案:B 考生得分:0 是否评分:已评分 评价描述: 2. 我国家庭用电电压和正常状况下人体的安全电压分别为?() 试题编号:20200828135037591 试题类型:单选题 标准答案:B 试题难度:一般 试题解析: 考生答案:A 考生得分:0 是否评分:已评分 评价描述:
3. 下列数据中,不属于模拟信号的有?() 试题编号:20200828135037872 试题类型:单选题 标准答案:D 试题难度:一般 试题解析: 考生答案:C 考生得分:0 是否评分:已评分 评价描述: 程序如下,串口监视器输出的值是?()4.
试题编号:20200828135038247 试题类型:单选题 标准答案:B 试题难度:一般 试题解析: 考生答案:B 考生得分:4 是否评分:已评分 评价描述: 5. 有关串联电路,下列说法不正确的是?() 试题编号:20200828135038278 试题类型:单选题 标准答案:D 试题难度:一般 试题解析: 考生答案:D 考生得分:4 是否评分:已评分 评价描述: Arduino UNO/Nano主控板,执行如下程序模块后,正常情况下,引脚3输出的电压为?()6.
试题编号:20200828135037809 试题类型:单选题 标准答案:D 试题难度:一般 试题解析: 考生答案:B 考生得分:0 是否评分:已评分 评价描述: 下图所示的4个电路中,电路搭设正确的是?() 7. 试题编号:20200828135037763 试题类型:单选题 标准答案:D 试题难度:一般 试题解析: 考生答案:C 考生得分:0 是否评分:已评分 评价描述: 8. HC-SR04超声波传感器有如下4个引脚,用于将数据传送到主控板的引脚是?()
机器人等级考试要求集团文件发布号:(9816-UATWW-MWUB-WUNN-INNUL-DQQTY-
最新机器人等级考试要求 机器人等级考试一共分为八级 1-2级:对应工业革命之后的机械时代; 3-4级:对应电子时代电子电路/机器人搭建; 5-6级:对应信息时代集成电路/通信/I2C总线/机械臂; 7-8级:与中国电子学会全国电子信息专业技术人员水平评价(QCEIT)体系衔接,进入电子信息专业人才序列。?? “ 一级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一)?知识 1. 了解主流的机器人影视作品及机器人形象 2. 会分辨稳定结构和不稳定结构 3. 会计算齿轮组的变速比例 4. 能够区分省力杠杆和费力杠杆 5、能够区分那种滑轮会省力 6、了解链传动和带传动各自的优缺点 7、了解不同种类的齿轮 (二)?实践 1. 基本结构认知 2. 知道六种简单机械原理(杠杆,轮轴,滑轮,斜面,楔,螺旋) 3. 齿轮和齿轮比 4. 链传动和带传动 5. 机器人常用底盘(轮式和履带) 二级标准 考试科目:机器人搭建、机器人常用知识 考试内容: (一)知识 1.了解中国及世界机器人领域的重要历史事件 2.知道机器人领域重要的科学家
3.知道重要的机器人理论及相关人物 4.知道凸轮、滑杆、棘轮、曲柄等特殊结构在生活中的应用 (二)实践 1.使用电池盒类型的遥控器控制电机运转 2.能够连接独立的电池盒、开关以及电机 3.完成凸轮、滑杆、棘轮、曲柄、连杆等特殊结构模型制作 4.驱动电机完成一定任务 5.掌握如何区分不同的曲柄连杆机构 6.了解电机的工作原理 7.了解摩擦力的产生条件和分类 8.了解凸轮结构中从动件的运动轨迹 三级标准 考试科目:机器人常用知识、电子电路搭建 考试内容 (一)知识 1.掌握电流、电压、电阻、导体、半导体等概念 2.掌握串联、并联的概念 3.了解模拟量、数字量、I/O口输入输出等概念 4.了解电子电路领域的相关理论及相关人物 5.了解二极管特性 6.掌握程序的顺序、选择、循环三种基本结构 7.掌握程序流程图的绘制 8.掌握图形化编程软件的使用 9.掌握变量的概念和应用 10.了解函数的定义 (二)电子电路 1.掌握简单串联并联电路的连接 2.掌握搭建不同LED显示效果电路的内容 3.掌握处理按键类型的开关输入信号的内容 4.掌握使用光敏电阻搭建环境光线检测感应电路的内容
考试服务中心:考试时间: 全国青少年机器人技术等级考试(一级) 实际操作考试试卷 考生姓名: 证件编号:□□□□□□□□□□□□□□□□□□ 一、模型样例 手动风扇 二、作品简答(30分) 1、请在下面写出起重机用途?(5分) 2、请写出该模型中蕴含的知识点?(25分) 参考答案: 简答题 1、请在下面写出风扇的用途(5分) 答案:风扇是指热天借以生风取凉的用具。用电或者手动驱动使扇叶进行转动,转化成自然风来达到乘凉效果。 2、请在下面写出该模型中蕴含的知识点(请同学分条作答,25分) (1)列表写出加速传动与减速传动中、半径,齿数,转速和传动力的关系。(15分) 已知:小齿轮与大齿轮的的半径比为1:3.
(3)模型中把手处运用的是哪种简单机械(10分) 答:轮轴。轮轴由轮和轴组成,能绕共同轴线旋转的机械,叫做轮轴。外环叫轮,内环叫轴。轮轴两个环是同心圆。 轮轴的实质:能够连续旋转的杠杆。 动力作用在轮上,则轮轴为省力杠杆,轮和轴的半径相差越大则越省力,但越费距离。动力作用在轴上则轮轴为费力杠杆,轮和轴的半径相差越大则费力,但越省距离。 三、作品展示(70) 请在规定时间内,完成作品搭建调试,并将身份证件及作品置于以下虚线框中,由考评员现场拍摄照片。
乐高机器人---运动篇 8.1简介 灵活的思维造就出了许许多多的机器人,运动使创造物获得了生命,带来无限的乐趣,同时也对自己的创造力进行了挑战。大多数运动机器人都属于轮子型与腿型机器人。虽然轮子在光滑的表面很有效,但是在凹凸不平的地面上运动,腿提供了更有力的方式。底盘结构是为了突出显示它们的传动系统和连接情况,因此,在实际搭建中还需对此结构加固。 8.2简单的差动装置 机器人具有很多优点(尤其具有简单性),至少在乐高的可移动机器人中常用到此结构。差动装置由机器人两边两个平行的驱动轮构成,单独提供动力,另外有一个或多个轮脚(万向轮)用于支撑重量并不是没有作用(图8.1)。注意我们称这个装置为差动装置是因为机器人的运动矢量是由两个独立部件产生的(它与差速齿轮没有关系,此装置上没有使用差速齿轮)。 当两个驱动轮以相同方向、相同速度转动时,机器人作直线运动。如果两个轮子转动速度相同,但方向相反时,机器人会绕着连接两轮线段的中心点旋转。根据轮子不同的转向,表8.1列出了机器人的不同运动状态。 图8.1简单差动装置 表8.1 轮子不同的旋转方向产生不同的运动状态
青少年机器人教育等级评测三级理论题 试卷编号:866213 试卷录入者:机器人包老师(玩得趣科教中心) 试卷总分:100 出卷时间:2019-12-16 16:15 答题时间:30分钟 本试卷从考试酷examcoo网站导出,文件格式为mht,请用WORD/WPS打开,并另存为doc/docx格式后再使用 单选题(每题2分,共20分) 1、如图,该指令属于哪类编程结构? A. 循环结构 MICROSOFT OFFICE 用户
C. 分支(选择)结构 D. 嵌套结构 2、在绘制流程图时,我们用哪种符号程序开始和结束? a b c d A.c B.a C.b、 D.d 3.以下属于“逻辑”运算符的指令的图形化模块是哪个? A. B. C. D. 4、此模块属于()? A. 顺序结构 MICROSOFT OFFICE 用户
MICROSOFT OFFICE 用户 C. 选择结构 D. 无法运行的结构 5、下列可以实现延时5秒的是? A. B. C. D. 6、如下图所示的程序,在2秒钟时间内LED 灯闪烁多少次? A. 20 B. 10 C. 5 D. 3 7、通过电位器旋转控制LED 的亮度,程序运行下列表达正确的是 ?
A. 电位器不能控制LED灯的亮度。 B. 电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭一次。 C. 电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭四次。 D. 电位器从一端旋转至另外一端时,LED灯的状态只有亮灭两种状态。 8、对红外传感器描述正确的是() A.红外传感器一定是模拟传感器。 B.红外传感器一定是数字传感器。 C.红外传感器根据需要可以设计成为数字传感器也可以设置成模拟传感器。 D.以上说法都是错误的。 9、这个模块表示什么? A. 一定是按键传感器模块接入D1端口。 B. 可能是按键传感器模块或者是其他数字输入模块接入D1端口。 C. 一定是模拟传感器模块接入D1端口。 D. 可能是模拟传感器也可能是数字传感器接入了D1端口。 MICROSOFT OFFICE 用户
全国青少年机器人技术等级考试标准 V2.5 (2016年11月第三次修订) 中国电子学会普及工作委员会 中国电子学会标准认证与应用推广中心 全国青少年电子信息科普创新联盟 国家教育信息化产业技术创新战略联盟 2016年11月
说明 本标准由中国电子学会标准认证与应用推广中心制定。V1版本由中国电子学会培训认证科普部开发;V2版本由全国青少年电子信息科普创新联盟标准工作组开发,由中国电子学会普及工作委员会审核通过,适用于由中国电子学会举办的全国青少年机器人技术等级考试,由经授权的全国青少年电子信息科普创新教育基地、全国青少年机器人技术等级考试中心承担招生和考试服务工作。 本标准旨在激发和培养青少年学习现代机器人技术的热情和兴趣,充分适应我国青少年的认知心理和水平,从力学、机械原理、电子信息和软件技术的入门实践出发,引导青少年建立工程化、系统化的逻辑思维,使青少年机器人技术等级考试更具科普性、趣味性和实践性。 本标准不以评价教学为目的,考核内容不是按照学校要求设定,而是从制作机器人所需要的技能和知识,以及国内机器人教育的普及情况而确定,主要以实践应用能力为主。 本标准由低到高分为一级至六级。六级及以上与中国电子学会全国电子信息专业技术资格认证(QCEIT)衔接,进入电子信息工程师序列。 所有相关本标准的解释权属于中国电子学会。
标准工作组成员 组长:杨晋副组长:程晨、吴艳光 工作专家(按拼音排序):包明明、蔡志伟、曹盛宏、陈炜、陈愈容、范瑞峰、方明、李庚、李曦、李作林、 鲁润泽、罗泰然、施宏伟、王建军、王俊、王海涛、 王鹏军、王志军、尤单立、余翀、余文科 外方专家(按字母排序):HermanYu,JesseFlot,PaulCopioli 参与单位: 北京大学(信息科学技术学院) 北京交通大学(电子信息工程学院) 北京航空航天大学(电子信息工程学院) 清华大学(电子工程系) VEX创首国际 Arduino龙湛(上海)信息科技有限公司 ARM安谋电子科技(上海)有限公司 Microsoft微软(中国)有限公司 北京泺喜教育科技有限公司 北京童喜同心教育科技有限公司 西安乐博士机器人有限公司 美科科技(北京)有限公司 中科直线(北京)科技传播有限责任公司 深圳盛思科教文化有限公司
20181208全国青少年机器人技术等级考试试卷(三级) 一、单选题(共30题,每题2分,共60分) 1.正常情况下,程序中,当引脚4输入的电压为 2.5V时,串口监视器的返回值是?[2分] A.0 B.1 C.512 D.不确定 2.程序中的低电平一般用()来表示。[2分] A.0 B.1 C.0或1 D.2 3. 运行下图程序,串口监视器窗口输出数值为? [2分] A.2 B.3 C.6 D.18 4.当光照射光敏电阻时,光敏电阻的阻值?[2分] A.变大 B.变小 C.不变 D.没有规律 5.两节普通干电池并联后的电压为?[2分] A.1.5V B.3V C.6V D.36V 6.ArduinoUNO或Nano主控板,通过电位器旋转控制LED的亮度,程序运行下列表达正确的是? [2分] A.电位器连接在3引脚,LED灯连接在A0引脚。 B.电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭一次。 C.电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭四次。 D.电位器从一端旋转至另外一端时,LED灯的状态只有亮灭两种状态。 7.下列模块中,属于逻辑运算符的是?[2分] A. B. C. D.
A .B. C. D. 11.关于超声波模块 说法正确的是?[2分] A. B. C. D. 13.读取按键值,下列模块正确的是?[2分] A. B. C. D.
[2分] A.20 B.10 C.5 D.3 15. 下列模块中,属于循环结构的模块是?[2分] A. B. C. D. 16.读取电位器模块的返回值,下列模块正确的是?[2分] A. B. C. D. 17.图示下列程序,串口监视器输出的值为[2分] A.5 B.15 C.10 D.20 18.2018世界机器人大会举办地点是?[2分] A.上海 B.北京 C.天津 D.深圳 19.关于二极管描述正确的是?[2分] A.二极管是导体 B.二极管具有单向导通的特性
20180616全国青少年机器人技术等级考试试卷(二级) 试卷编号:866203 试卷录入者:机器人包老师 试卷总分:100 出卷时间:2018-12-25 15:04 答题时间:30分钟 分数:100 题数:50 一、单选题(共30题,每题2分,共60分) 1.下图中,能够将圆周运动转化为往复摆动的是? [2分] A.a B.b C.c D.d 参考答案:C 2.1969年,()提出了“恐怖谷理论”:当人形玩具和机器人仿真度超过一个临界值,人们对它的好感度会突然降低,直至谷底。[2分] A.约瑟夫?英格伯格 B.乔治?德沃尔 C.阿西莫夫 D.森昌弘 参考答案:D 3.下列选项中,关于连杆机构说法错误的是?[2分] A.挖掘机中有连杆机构 B.雨刷器中有连杆机构 C.连杆机构必须是两个杆构成 D.骑自行车时大腿和小腿也相当于连杆机构 参考答案:C
4.如下图所示不完全齿轮机构,主动轮转动(),从动轮可以转动1圈。 [2分] A.1圈 B.2圈 C.3圈 D.4圈 参考答案:D 5.如果制造一个机器人确保其向一个方向移动,我们需要的装置是?[2分] A.棘轮机构 B.连杆机构 C.杠杆结构 D.轮传动 参考答案:A 6.下列关于凸轮机构说确的是?[2分] A.凸轮机构不属于间歇运动机构 B.凸轮机构按照凸轮的形状可分为盘形凸轮、圆周凸轮和移动凸轮 C.凸轮机构的从动件只能直线运动 D.凸轮机构的从动件只能往复摆动 参考答案:B 7.下列关于机器人说法不正确的是?[2分] A.机器人是自动控制机器的总称 B.高仿真机器人是整合了控制论、机械、电子、计算机与人工智能等的产物 C.机器人必须是人形的 D.机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成参考答案:C 8.下列选项中,不属于常用机器人驱动方式的是?[2分] A.电力驱动 B.液压驱动 C.气压驱动 D.风力驱动 参考答案:D 9.约瑟夫?英格伯格和乔治?德沃尔联手制造了第一台?[2分] A.水下机器人 B.服务机器人
2020年全国青少年机器人技术等级考试一级A卷 一、单选题(每题2分,共60分) 1. 下列人物形象中,哪一个是机器人?() A. B. C. D. 答案:D 2.下列多边形中,最稳定的多边形是() A. B. C. D. 答案:A 3.为了省力应该使用下面哪一种杠杆() A.阻力臂比动力臂长的杠杆 B.动力臂比阻力臂长的杠杆 C.阻力臂与动力臂相等的杠杆 D.无法判断 答案:B 4.机器人的英文单词是() A.botre B.boret C.robot D.rebot 答案:C 5.人们利用斜面搬运重物是为了()
A.省力 B.费力 C.少移动距离 D.好玩 答案:A 6.如下图所示,利用定滑轮匀速提升重物G,向三个方向拉动的力分别是F1、F2、F3,三个力的大小关系是() A.F1最大 B.F2最大 C.F3最大 D.一样大 答案:D 7.以下说法中不正确的是() A.人类智能是与生俱来的 B.人工智能是人类赋予的 C.机器人不属于人工智能 D.人工智能是模仿人类智能 答案:C 8.如下图中,动力从哪个齿轮输入时输出速度最小?() 3 1 2 A.1号 B.2号 C.3号 D.以上均相同 答案:A 9.下列关于定滑轮和动滑轮的描述,正确的是() A.定滑轮和动滑轮都能省力 B.定滑轮和动滑轮都能改变力的方向 C.定滑轮能省力,动滑轮能改变力的方向 D.定滑轮能改变力的方向,动滑轮能省力 答案:D 10.使用轮轴时,下面说法中错误的是() A.轮轴只能省力一半 B.动力作用在轮上可以省力 C.动力作用在轴上不能省力
D.使用轮半径与轴半径之比为2:1的轮轴时,可以省力一半(动力作用在轮上) 答案:A 11.盘山公路总是修的弯弯曲曲,环绕上坡盘山而上,而不是从山下直通山顶,这是为了() A.美观 B.省距离 C.省力 D.经济 答案:C 12.若把轮轴、定滑轮、动滑轮看作杠杆,则下列说法正确的是() A.轮轴一定是省力杠杆 B.定滑轮可以看作是等臂杠杆 C.动滑轮可以看作动力臂为阻力臂二分之一倍的杠杆 D.以上说法都不对 答案:B 13.下面哪部电影于机器人无关() A.终结者 B.超能陆战队 C.功夫熊猫 D.机器人历险记 答案:C 14.步行机器人的行走机构多为() A.滚轮 B.履带 C.连杆机构 D.齿轮机构 答案:C 15.关于齿轮,下列说法正确的是() A.齿轮只能提高转速 B.任何带齿的轮子都是齿轮 C.齿轮是能相互啮合的有齿的机械零件 D.以上说法均不正确 答案:C 16.下图中不属于滑轮组的是() A. B. C. D. 答案:C 17.机器人结构中,起着支撑作用的部件是() A.机座 B.机体 C.腰部 D.臂部