机械工程导论认知报告
第一章抽油机
1.1 组成
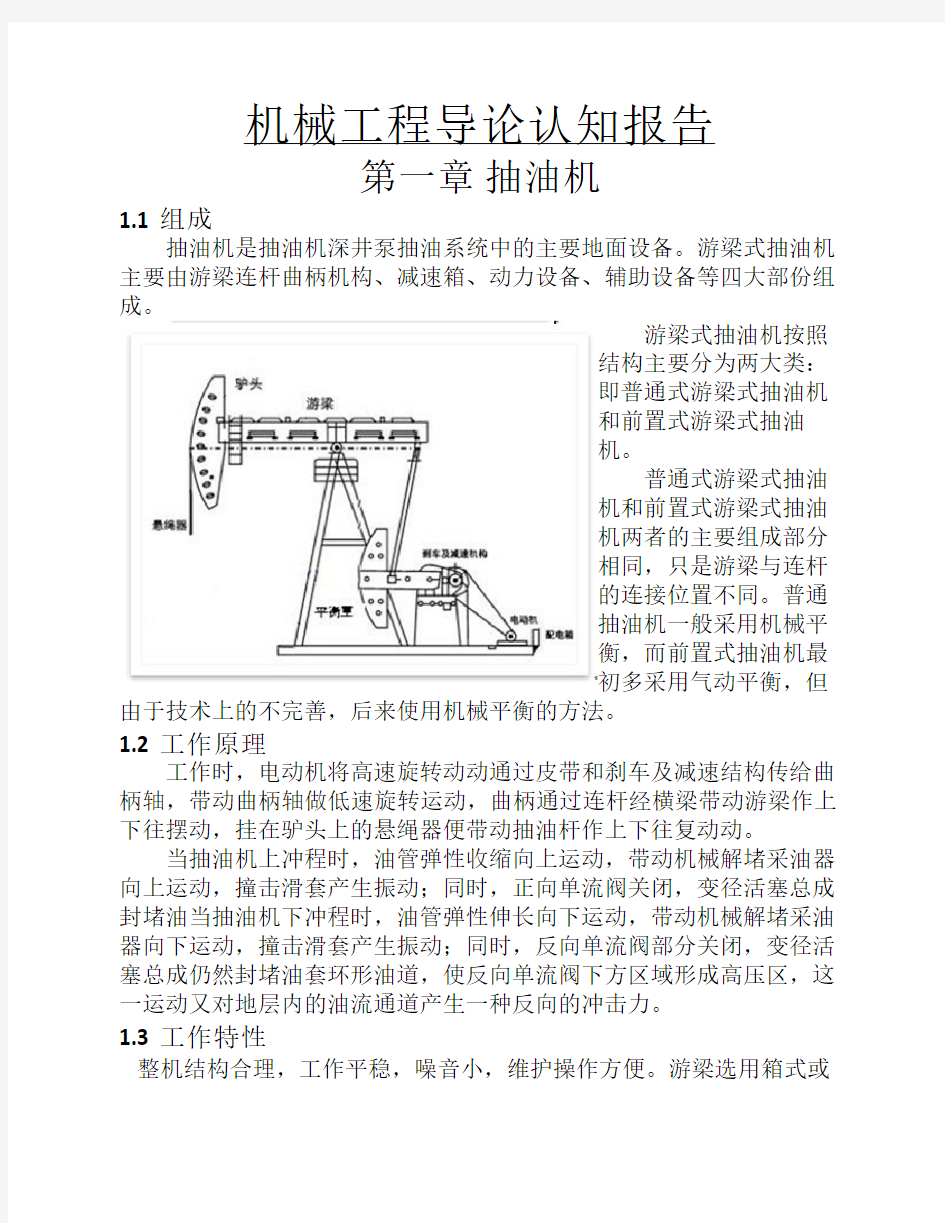
抽油机是抽油机深井泵抽油系统中的主要地面设备。游梁式抽油机主要由游梁连杆曲柄机构、减速箱、动力设备、辅助设备等四大部份组成。
游梁式抽油机按照
结构主要分为两大类:
即普通式游梁式抽油机
和前置式游梁式抽油
机。
普通式游梁式抽油
机和前置式游梁式抽油
机两者的主要组成部分
相同,只是游梁与连杆
的连接位置不同。普通
抽油机一般采用机械平
衡,而前置式抽油机最
初多采用气动平衡,但由于技术上的不完善,后来使用机械平衡的方法。
1.2 工作原理
工作时,电动机将高速旋转动动通过皮带和刹车及减速结构传给曲柄轴,带动曲柄轴做低速旋转运动,曲柄通过连杆经横梁带动游梁作上下往摆动,挂在驴头上的悬绳器便带动抽油杆作上下往复动动。
当抽油机上冲程时,油管弹性收缩向上运动,带动机械解堵采油器向上运动,撞击滑套产生振动;同时,正向单流阀关闭,变径活塞总成封堵油当抽油机下冲程时,油管弹性伸长向下运动,带动机械解堵采油器向下运动,撞击滑套产生振动;同时,反向单流阀部分关闭,变径活塞总成仍然封堵油套环形油道,使反向单流阀下方区域形成高压区,这一运动又对地层内的油流通道产生一种反向的冲击力。
1.3 工作特性
整机结构合理,工作平稳,噪音小,维护操作方便。游梁选用箱式或
工字钢结构,强度高,刚性好,承载能力大。减速器采用人字渐开线或双圆弧齿形齿轮,加工精度高,承载能力强,使用寿命长。驴头可用上翻、上挂或侧转三种形式之一。刹车采用外抱式结构,操作灵活,制动迅速,安全可靠。底座采用地脚螺栓连接或压杠链接两种方式之一。
第二章钻机
2.1 组成
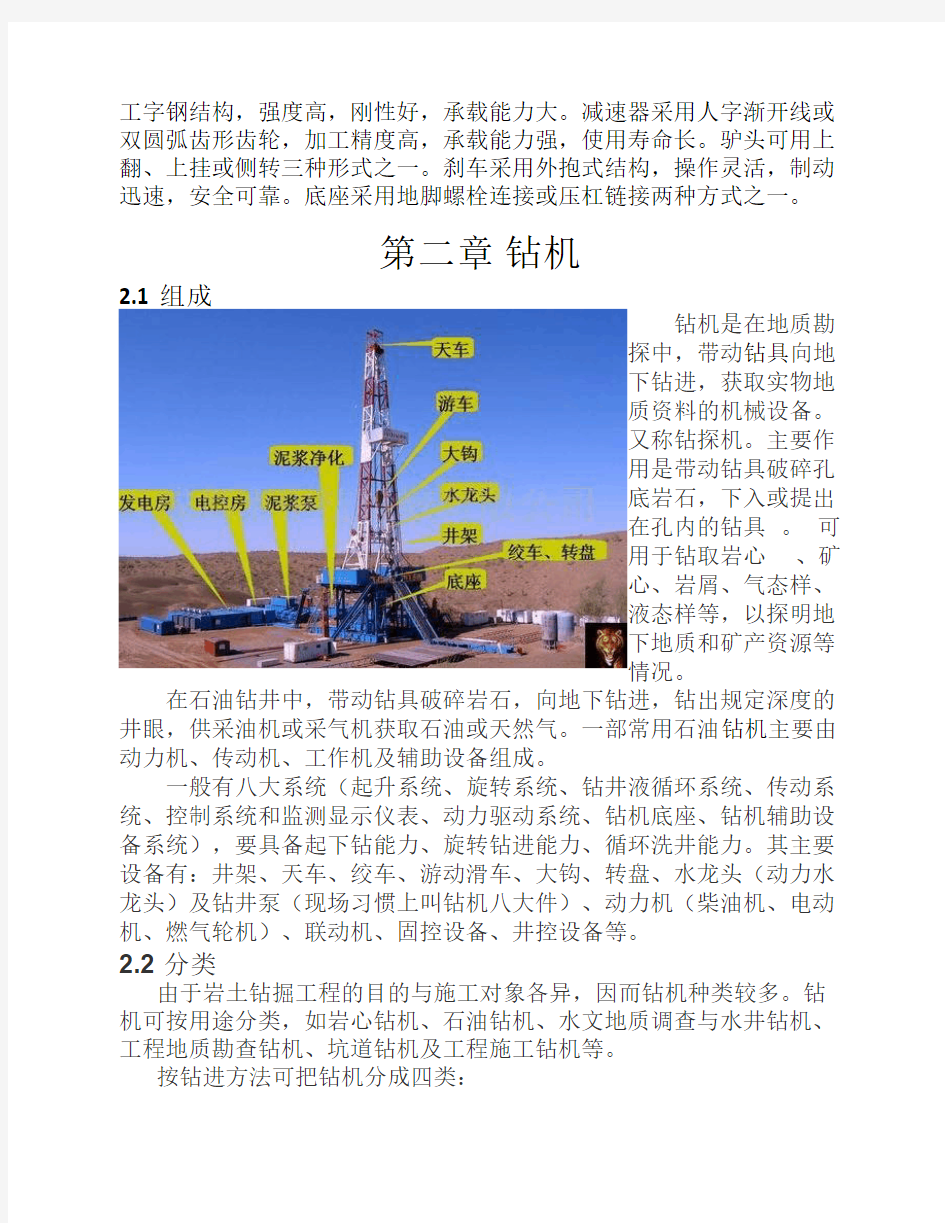
钻机是在地质勘
探中,带动钻具向地
下钻进,获取实物地
质资料的机械设备。
又称钻探机。主要作
用是带动钻具破碎孔
底岩石,下入或提出
在孔内的钻具。可
用于钻取岩心、矿
心、岩屑、气态样、
液态样等,以探明地
下地质和矿产资源等
情况。
在石油钻井中,带动钻具破碎岩石,向地下钻进,钻出规定深度的井眼,供采油机或采气机获取石油或天然气。一部常用石油钻机主要由动力机、传动机、工作机及辅助设备组成。
一般有八大系统(起升系统、旋转系统、钻井液循环系统、传动系统、控制系统和监测显示仪表、动力驱动系统、钻机底座、钻机辅助设备系统),要具备起下钻能力、旋转钻进能力、循环洗井能力。其主要设备有:井架、天车、绞车、游动滑车、大钩、转盘、水龙头(动力水龙头)及钻井泵(现场习惯上叫钻机八大件)、动力机(柴油机、电动机、燃气轮机)、联动机、固控设备、井控设备等。
2.2 分类
由于岩土钻掘工程的目的与施工对象各异,因而钻机种类较多。钻机可按用途分类,如岩心钻机、石油钻机、水文地质调查与水井钻机、工程地质勘查钻机、坑道钻机及工程施工钻机等。
按钻进方法可把钻机分成四类:
冲击式钻机,又分为钢丝绳冲击式、钻杆冲击式两种钻机。回转式钻机,又分为下面三种:立轴式--手把给进式、螺旋差动给进式、液压给进式钻机;转盘式--钢绳加减压式、液压缸加减压式钻机;移动回转器式--全液压动力头式、机械动力头式钻机。振动钻机。复合式钻机:振动、冲击、回转、静压等功能以不同组合方式复合在一起的钻机。
2.3 工作原理
吊环与吊环座之间用销轴连接,吊环座与钩杆焊接成一体,筒体与钩身用左旋螺纹连接,并用止动块防止螺纹松动。钩身和筒体可沿钩杆上、下运动。内、外负荷弹簧的作用是起钻时能使立根松扣后向上弹起。
通体内装有机油。止推轴承的座圈将油腔分为两部分,座圈上开有油孔。由于油流到通过的阻尼作用,吸收了其下钻作业时钩身的冲击震动,可以防止钻杆街头螺纹损坏。
通体上端由6个小弹簧和定位盘组成定位装置,借助定位与吊环座环形接触面之间的摩擦力,可以防止提升空吊卡时转动使调换转位,方便井架工操作。
第三章柔性制造技术
3.1 简介
柔性制造技术也称柔性
集成制造技术,是现代先进
制造技术的统称。柔性制造
技术集自动化技术、信息技
术和制作加工技术于一体,
把以往工厂企业中相互孤立
的工程设计、制造、经营管
理等过程,在计算机及其软
件和数据库的支持下,构成一个覆盖整个企业的有机系统。
3.2 特点
⑴柔性制造技术是从成组技术发展起来的,因此,柔性制造技术仍带有成组技术的烙印——零件三相似原则:形状相似;尺寸相似和工艺相似。
这三相似原则就成为柔性制造技术的前提条件。凡符合三相似相原
则的多品种加工的柔性生产线,可以做到投资最省(使用设备最少,厂房面积最小)生产效率最高(可以混流生产,无停机损失);经济效益最好(成本最低)。
⑵品种中大批量生产时,虽然每个品种的批量相对来说是小的,多个小批量的总和也可构成大批量,因此柔性生产线几乎无停工损失,设计利用率局。
⑶柔性制造技术组合了当今机床技术、监控技术、检测技术、刀具技术、传输技术、电子技术和计算机技术的精华,具有高质量、高可靠性、高自动化和高效率。
⑷可缩短新产品的上马时间,转产快,适应瞬息万变的市场需求。
⑸可减少工厂内另件的库存,改善产品质量和降低产品成本。
⑹减少工人数量,减轻工人劳动强度。
⑺一次性投资大。
第四章机器人
4.1 简介
机器人是自动执行工作的机器装置。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。
国际上对机器
人的概念已经逐渐
趋近一致。一般来
说,人们都可以接
受这种说法,即机
器人是靠自身动力
和控制能力来实现
各种功能的一种机
器。联合国标准化
组织采纳了美国机
器人协会给机器人
下的定义:“一种
可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。”
4.2 结构
即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。
4.3 控制语言
通过符号来描述机器人动作的方法。通过使用机器人语言,操作者对动作进行描述,进而完成各种操作意图。按照语言智能程度的高低,计算机语言可分为三类:执行级、协调级和决策级语言。其中执行级是指用命令来描述机器人的动作,又称为动作级语言;协调级是指着眼于对象物的状态变化的程序,称之为结构化编程语言;决策级又称为目标级语言,只给出工作的目的,自动生成可实现的程序,与自然语言非常相近,而且使用方便。