
第四章静力学和刚度分析(部分)
4.1 引言
本章研究并联机器的静力学和刚度。机器工作时,末端执行器必然要对外界施加一定的力和力矩,而这些均由关节来提供。对于串联机器,驱动力通过一个开环运动链传递;对于并联机器,驱动力通过几个并联路径传递到末端执行器。它们的研究方法有一定的不同。
机器的静力学是在假设机器不发生运动时,研究各关节和末端执行器所承受的力和力矩之间的关系,包括大小和方向。静力学分析对确定机器各构件和轴承的尺寸,以及确定合适的驱动器是必需的,是机器人柔顺控制(compliance control)的基础。本章中,为简化描述,我们使用关节力和操作力这样的术语来表示关节和终端上的力和力矩。
机器静力学分析的方法有多种,包括矢量法、虚功原理、螺旋代数和四元数等。矢量法又称为Chace方法,针对机器的每个构件,建立隔离体图和静力平衡方程,然后统一求解。虚功原理是基于能量转换的方法,在并联机器的研究中应用非常广泛。本章重点介绍基于矢量法和虚功原理的静力学分析。另外,在探讨操作力与关节力之间的关系时,必须考虑各构件受力和变形的关系,因为如果构件变形过大将导致机器性能变坏。终端和关节的受力与变形之间的关系属于机器的刚度分析范畴,这也是本章重要内容之一。
本章首先介绍机器人静力学分析的一些基础知识,包括:构件隔离体图和静力平衡方程,基于不同坐标系下的构件静力平衡方程,基于虚功原理的静力学分析方法,刚度矩阵和柔度矩阵。在随后的并联机器静力学分析部分,应用矢量法和虚功原理对两种不同构型的机器进行了静力学分析。在刚度分析部分,我们首先介绍只考虑系统驱动误差的刚度矩阵的求解;然后重点介绍目前应用非常广泛的用于刚度分析的有限元方法,并且针对几台实际的并联机器,给出了具体的建模和求解过程,并提供了大量的实验数据和分析结论,这些数据对设计和建造该类并联机器具有很好的参考价值。
4.2 静力学和刚度分析基础
这一部分主要介绍机器人静力学和刚度分析的一些基础方法和概念,包括,机构的隔离体图,静力平衡方程,基于不同坐标系的构件静力平衡方程,虚功原理,刚度和柔度矩阵。
4.2.1 隔离体图和静力平衡条件
在静力学研究中,建立隔离体图(free-body diagram)是一个相当基础且重要的分析手段。它的主要思想是:将机构中的一个零件或部件与其它零部件假想分离,将它作为一个独
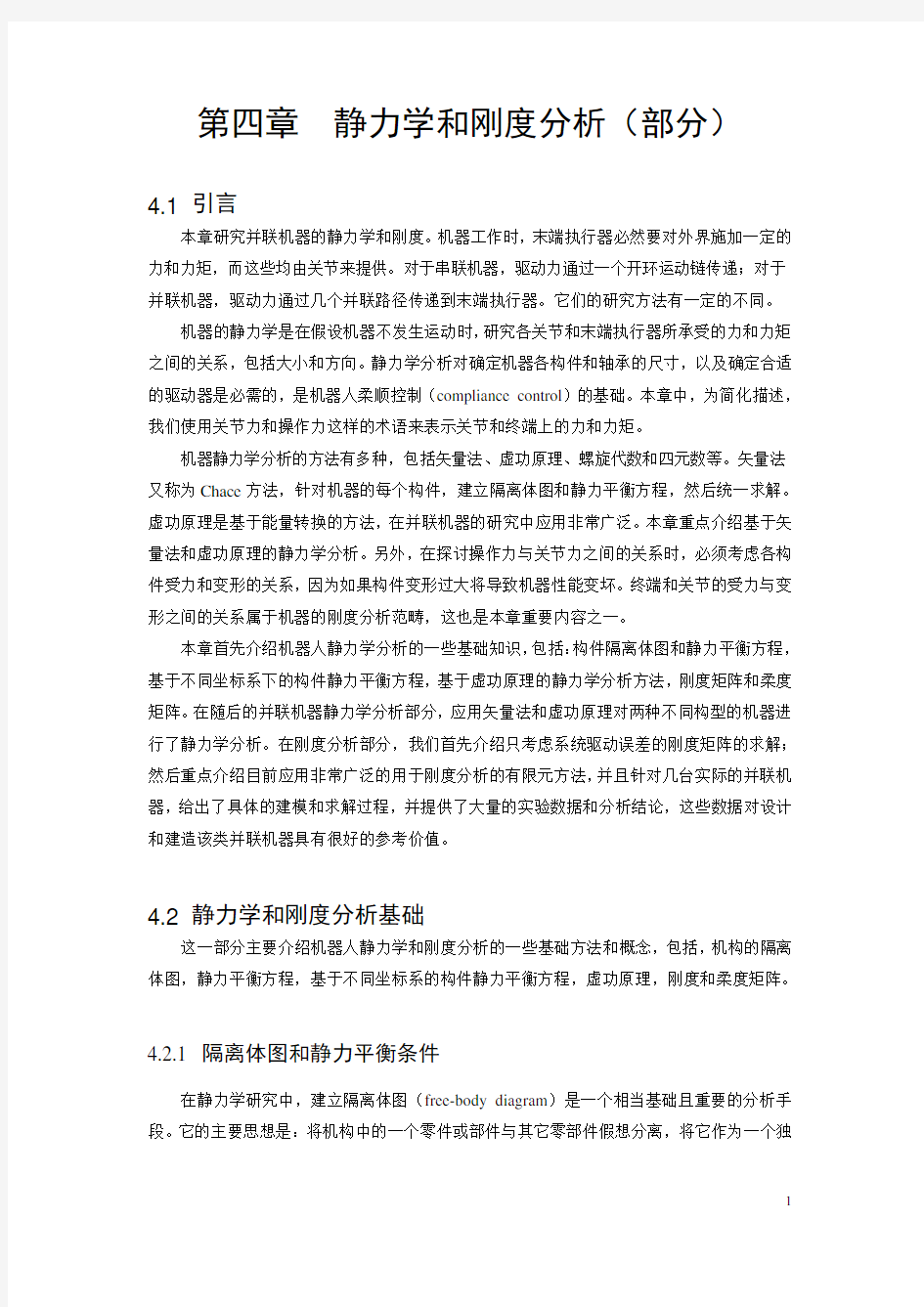
立的单元进行分析。一个隔离体可以包含一个或多个零件,同一个机构,根据需要可以建立多个隔离体。图4.1(a )是一个四杆机构,将固定构件称为构件0,构件O 0O 1 、O 1O 2和O 2O 3称为构件1、2和3。图4.1(b )中的隔离体包含3个运动构件,作用于隔离体上的力包括一个驱动力矩和一个外力负载,以及固定构件通过关节O 0和O 3施加的力和。这里,符号表示构件i 施加于构件j 上的力。图4.1(c )和(d )分别是包含2个和1个运动构件的隔离体图。如果要考察构件的内力,可以将构件假想分割成几个部分,建立隔离体图,如图4.1(e )所示。
0,1f 0,3f i j ,f 图4.1 平面四杆机构的隔离体图
(a )
(c )
(b )
(d )
(e )
1,23,
对于一个处于静力平衡的隔离体,所有外力的矢量和应等于0,相对于任意点的所有力矩的矢量和也必须等于0。这个条件称为静力平衡条件,可表示为
0f =∑ (4.1) 0m =∑ (4.2)
对于平面机构,式(4.1)和(4.2)包含了3个标量方程。对于空间机构,上述方程包含了6个标量方程。求解这些方程就可以获得所有关节上的力和力矩。
4.2.2 静力平衡方程
4.2.2.1 构件的静力平衡方程
在开环机构中,每个构件均通过关节与1个或2个其它构件相连接,下面就根据上节介绍的静力平衡条件,推导构件上的静力平衡方程。图4.2表示作用于一个典型构件上的力和力矩。构件i 通过关节i 和分别与构件1+i 1?i 和1+i 相连。可以将构件对构件的作
i 1+i
用归结为关于坐标系原点的合力和合力矩。同样,构件作用于构件i 上的力可以归结为关于坐标系原点的力和力矩。
}{i O i O i i ,1+f i i ,1+m 1?i }{1?i O 1?i O 1,?i i f 1,?i i m 图4.2 作用于构件i 上的力和力矩
构件i
i
,m g
i m ci
r 关节i +1
x i
O i
需要使用的几个符号定义如下:
i i ,1+f :构件i 基于点施加于构件i O 1+i 上的合力,显然,i i i i ,11,++?=f f 。 i i ,1+m :构件i 基于点施加于构件i O 1+i 上的合力矩,i i i i ,11,++?=m m 。 g :重力加速度矢量。 i m :构件i 的质量。
ci r :构件i 的质心相对于的位置矢量。
}{i O i r :坐标系原点相对于坐标系的位置矢量。
}{i O i O }{1?i O
如图4.2所示,作用于构件i 的力包括、和。力的平衡方程可以写为
1,?i i f 1,+i i f g i m 0g f f =+++?i i i i i m 1,1, (4.3)
作用于构件i 的力矩有两个:和。另外,和分别对点产生力矩。因此,基于点的力矩平衡方程可写为
1,?i i m 1,+i i m 1,?i i f g i m i O i O 0g r f r m m =×+×?+?+?i ci i i i i i i i m 1,1,1, (4.4)
i i ,1+f 和被称为构件和构件i i ,1+m i 1+i 之间的作用力(reaction force )和作用力矩
(reaction moment )。当时,和表示基础构件作用于第一个运动构件的力和力矩。当时,和表示末端执行器对外界的输出力和力矩。
0=i 0,1f 0,1m n i =n n ,1+f n n ,1+m 对于每一个运动构件,重复使用式(4.3)和(4.4)一次。如果机构具有n 个构件,就会产生2n 个矢量方程,这时,方程具有22+n 个变量,因此,必须事先知道其中的两项,方程组才能求解。例如,当给定操作任务求解关节力时,和是给定的矢量。
n n ,1+f n n ,1+m 为方便起见,通常将构件之间的作用力和力矩组合成一个6维矢量,如
??
?
???=???1,1,1
,i i i i i i m f F (4.5) 1,?i i F 被称为在处构件作用于构件的一个力螺旋(wrench )。
1?i O 1?i i
4.2.2.2 迭代求解方法
本节介绍一种静力分析的迭代方法。这种方法一次只针对一个构件,求解其作用力和力矩,而不需要同时求解2n 个矢量方程。
为便于分析,将式(4.3)和(4.4)写成如下的迭代形式:
g f f i i i i i m ?=+?,11, (4.6) g r f r m m i ci i i i i i i i m ×?×+=?+?1,,11, (4.7)
式(4.6)和(4.7)均被表示在固定坐标系下。但通常情况下和都是在构件坐标系下指定的,就需要利用构件的旋转矩阵进行变换,即
i r ci r ci i i ci r R r 0= (4.8) i i i i r R r 0= (4.9)
当给定输出力和力矩时,就可以根据式(4.6)和(4.7),从n i =开始,一次计算一个构件上的作用力和力矩,依次计算出全部构件上的作用力和力矩。
同样,也可以基于某一个构件坐标系来计算构件间的作用力和力矩,这时,式(4.6)和(4.7)就表示为
g f f i i i i i i i i
m ?=+?,11, (4.10)
g r f r m m i i ci i i i i i i i i i i i i
m ×?×+=?+?,1,11, (4.11)
只要得到了基于构件i 坐标系下的作用力,就可以根据构件坐标系之间的旋转矩阵将其转化为构件坐标系下的矢量,形式如下:
1?i 1,11,1
????=i i i i i i i i f R f (4.12)
1,11,1
????=i i i i i i i i m R m (4.13)
式(4.10)和(4.11)中的是重力加速度矢量在构件i 坐标系下的表示,通常在固定坐标系下是已知的,也就是当,已知,然后利用下式计算其它的:
g i
g 0=i g 0
g i
g R g 11 ??=i i i i n i ,,2,1L = (4.14)
同样,如果输出力和力矩是在固定坐标系下给定的,就必须将其按照下式转化为基于终端坐标系的矢量:
n n n n n n
,100,1 ++=f R f (4.15)
n n n n n n
,100,1 ++=m R m (4.16)
只要求出了构件间的作用力,各驱动器产生的驱动力和力矩就可以很容易确定。对于移动关节,驱动力沿关节轴线方向,假设关节间的摩擦力忽略不计,驱动力i τ可按下式计算:
1,T 1??=i i i i f z τ (4.17)
式中,是指向第i 个关节轴的单位矢量。从式(4.17)可看出,驱动器仅仅承受中沿关节轴线方向的一部分力,而中的另外一部分力则由关节轴承来承担。
1?i z 1,?i i f 1,?i i f 同样,对于一个旋转关节,驱动器施加一个相对于关节轴线的力矩,可表示为
1,T 1??=i i i i m z τ (4.18)
与移动关节类似,驱动器只承受中沿关节轴线方向的一部分力矩,其它的部分则由轴承来承担。
1,?i i m 在式(4.17)和(4.18)中得到的i τ统一被称为等效关节力矩(equivalent joint torque )。
4.2.2.3 平面3自由度机器人的静力学分析
以第二章和第三章研究的平面3自由度机器人(见图2.14)为例,阐述基于构件静力平衡方程的静力学分析步骤。
假设,末端执行器的输出力和力矩给定,分别是[]
T
4,30,,y x f f =f 和,
重力加速度矢量指向轴的负方向,各构件的质心位于构件的中点。D-H
参数在表2.1中已经给出,则矢量和可表示为
[]T
4,3,0,0z m =m []T
0,,0c g ?=g 0y ci i r i i
r T
0 ,0 ,2??
?????=i ci i
l r (4.19)
[]T
0 ,0 ,i i i
l =r (4.20)
利用第二章得到的旋转矩阵,对于3,2,1=i ,可得
[T 111
111010,,2
θθs c l c c ?
==r R r ] [T 12122
222020,,2
θθs c l c c ?==r R r ] [T 1231233
333030,,2
θθs c l c c ?
==r R r ] []T
111111010,, θθs c l ==r R r []T
12122222020,, θθs c l ==r R r
[]T
1231233333030,, θθs c l ==r R r
这时就可以根据式(4.6)和(4.7)计算施加于构件3上的作用力和力矩。将,,
和代入式(4.6)和(4.7),可得
3r 3c r 4,3f 4,3m ???
?
?
?????+=?=0 333,42
,3c y x g m f f m g f f (4.21)
???
?
?
?????=×?×+=z c m m 2,3332,333,42
,30 0 g r f r m m (4.22)
式中,12333123312332,35.0θθθc l g m s l f c l f n m c x y z z +?+=。
对于,将上面得到的和与和一起代入式(4.6)和(4.7),得到
2=i 3,2f 3,2m 2r 2c r ()???
??
?????++=?=0 3222,31
,2c y x g m m f f m g f f (4.23)
???
?
?
?????=×?×+=z c m m 1,2221,222,31
,20 0 g r f r m m (4.24)
式中,
()()()
123312231222123312212331221,25.05.0 θθθθθθθc l c l g m c l g m s l s l f c l c l f n m c c x y z z ++++?++=
对于,将,,和代入式(4.6)和(4.7),可得
1=i 1r 1c r 2,1f 2,1m (???
?
?
?????+++=?=0 32111,20
,1c y x g m m m f f m g f f ) (4.25)
???
?
??????=×?×+=z c m m 0,1110,111,20
,10 0 g r f r m m (4.26)
式中,
()()()()
12331221131221121111233122111233122110,15.0 5.05.0 θθθθθθθθθθθθc l c l c l g m c l c l g m c l g m s l s l s l f c l c l c l f n m c c c x y z z ++++++++?+++=
最后,应用式(4.18)计算关节力矩如下:
z m 0,10,1T
01==m z τ (4.27)
z m 1,21,2T 12==m z τ (4.28)
z m 2,32,3T 23==m z τ (4.29)
值得注意的一点,如果忽略重力的影响,关节力矩和末端输出力之间的关系可写成
????
??????=??
???
?????z y x m f f T 321J τττ (4.30)
式中
1 11)()(1233123312212331221112331233122123312211????
?
?????+++?+?++?= c l c l c l c l c l c l s l s l s l s l s l s l θθθθθθθθθθθθJ
也就是说,如果不考虑重力,Jacobian 矩阵的转置矩阵反映了末端输出力和关节力矩之间的传递关系,这一结论在下面的章节中将得到证明。
4.2.3 基于虚功原理的静力学分析
本节引入虚功原理来阐述关节力和操作力之间的关系。一个系统的虚位移是,在外力作用下,系统位形可能发生的微小变化。由于位形的这种微小变化可能发生,也可能不发生,因此被称为虚位移,以区别于由于外力或约束发生变化而产生的实际位移。一般用符号x δ来表示虚位移,以区别于实际位移的符号或x d x Δ。
对于一个机器,各关节处的虚位移可表示为[]T
21,,n q q q δδδδL =q ,末端执行器的虚
位移可表示为[]T
,,δ?δδδL y x =x 。设操作力由终端输出的力和力矩组成,可表示为
[]
T
T T ,m f F = (4.31)
关节力矩矢量为
[]T
21,,,n τττL =τ (4.32)
假设,各关节处的摩擦力忽略不计,也就是所有的关节均看做是理想关节,所有的约束均为理想约束,则各关节处的约束反力所做的虚功总和等于零。这样,假如忽略重力的影响,机构所有主动力做的虚功为
x F q τδδδT T ?=W (4.33)
根据虚功原理,假如一个系统处于平衡,对于任意虚位移,作用于系统上的所有外力的虚功之和等于零。根据前面介绍的机构微分运动学,q δ和x δ不独立,存在以下关系
q J x δδ = (4.34)
式中,为机构在该瞬时的正向Jacobian 矩阵。将式(4.34)代入式(4.33),可得
J 0)(T T =?q J F τδ (4.35)
上式对于任意虚位移q δ均成立,所以可得
0T T =?J F τ (4.36)
对上式取转置,可得
F J τT = (4.37)
方程(4.37)反映了操作力矢量和关节力矢量之间的关系。由于Jacobian 矩阵是依赖于机构位形的,这种映射关系也依赖于机构位形。
4.2.4 力椭球
与研究微分运动特性的过程类似,我们可以研究由一个单位关节力所产生的操作力的情况,以此来揭示静力传递的特性。为此,令
1T =ττ (4.38)
将式(4.37)代入上式,可得
1T T =F JJ F (4.39)
与第三章的分析类似,在一个给定的机器位形下,式(4.39)表示了一个n 维椭球体,被称为力椭球。由于是一个对称的半正定矩阵,它的特征向量是正交的。椭球的主轴方向是
的特征向量的方向,它们的半轴长度等于特征值的平方根的倒数。
T
JJ T JJ 由于Jacobian 矩阵依赖于机器位形,力椭球也依赖于位形。当末端执行器由一个位形运动到另一个位形,力椭球的形状和方向也随之改变。与速度椭球相似,力椭球越接近于圆,机构中力的传递特性就越好。当所有主轴长度相等时,力的传递被认为是各向同性。在一个各向同性点,关节力空间的一个n 维单位球映射为操作力空间的一个m 维的球。在一个奇异点处,关节力空间的一个n 维单位球将被映射为操作力空间的一个m 维柱体。这时,机构的机械利益(mechanical advantage )在某些方向上将变得无限大。
下面以图4.3所示的平面2自由度机器人为例来阐述机构的力椭球。
图4.3 平面2自由度的机械手
(f x , f y )
机器人的操作力和关节力可分别记为[]T
,y x f f =f 和[]
T
2
1
,ττ=τ。将3.2.4节求得的
Jacobian 矩阵代入式(4.37),可得
???
????????
??+??=??????21122122122111221121 f f c l s l c l c l s l s l θ
θθθθθττ (4.40) 设杆长21=
l ,12=l 。在01=θ,2
2π
θ=
的位形下,Jacobian 矩阵为
??
??????=0 21 1J (4.41)
由此可得
???????
???=2 22 2 T
JJ (4.42)
T JJ 的特征值是4142.3221=+=λ和5858.0222=?=λ。相应的特征向量在单位化
之后,可写成和。这两个特征向量与和轴的夹角为
,它们构成了力椭球的主轴。
)707.0 ,707.0(?)707.0 ,707.0(x f y f °45将上式得到的代入式(4.39)可得
T
JJ 1225858.0224142.322222
22
2=??????
??+???
??????=+?y x y x y y x x f f f f f f f f + (4.43) 图4.4显示了力椭球及其主轴。所有单位关节力矢量产生的操作力矢量均位于椭球上,沿长轴方向是[]T
1924.0,924.0=F ,沿短轴方向是[]T
2383.0,383.0?=F 。而产生和所必需的关节力矩分别是和1F 2
F []T
1924.0,383.0?=τ[]T
2383.0,924.0=τ,它们在图中分别对
应着P 、Q 和P *、Q *。可看出,沿着长轴方向的机械利益要远远大于沿短轴方向,也就是说,
在某一位形下,大小相等的关节力矢量,只要方向不一样,它们产生的操作力可能相差很大。因此,在关节力上限确定的情况下,机器在其终端不同方向上能够提供的操作力不同,抵抗外力不发生变形的能力也不同,所以,对机器进行静力学分析具有重要的实际意义。
图4.4 平面2自由度串联机器人的力椭球
(1)关节力空间
(2)操作力空间
4.2.5 刚度分析
当机器执行某一具体操作时,终端要向外界环境施加力或力矩,同时也承受了外界施加的力或力矩。这些力和力矩导致机器各构件要发生变形,偏离预定位形。从直观上看,变形的大小由承受的外载荷与机器本身的刚度决定,也就是说,机器的刚度直接影响位置精度。
机器的刚度主要取决于下面几个因素:构件的尺寸和材料,机构的受力特性,驱动器和控制器的特性。在本节中,我们假设建造机器的主要构件具有足够的刚度,只考虑传动机构和伺服系统对变形的影响。
4.2.
5.1 柔度矩阵
机器中的每个关节均由驱动器通过减速器和传动轴来驱动,当传递力和力矩时,减速器和传动轴都要发生变形。此外,伺服系统在提供驱动力和力矩时,也是依靠位置和速度误差信号和它们的反馈增益。因此,减速器、传动轴和伺服系统的刚度构成了系统的刚度,这里将所有的构件均作为刚体看待。
令n 是关节空间的维数,m 是操作空间的维数,i τ是通过第i 个关节传递的关节力矩,
i q Δ是在该关节处的变形。对于微小变形,可以将i τ和i q Δ表示成下列线性关系:
i i i q k Δτ= n i ,,2,1L = (4.44)
式中,被称为第i 个关节的刚度常数(柔度系数)。为方便起见,可以将上式写成矩阵形
i k
式
q K τΔ= (4.45)
式中,,,[]T
21,,,n τττL =τ[]T
21,,,n q q q ΔΔΔΔL =q ()n k k k diag ,,,21L =K 是一个的对角阵。
n
n ×根据前面分析,关节位移q Δ和终端位移x Δ存在如下关系:
q J x ΔΔ= (4.46)
式中,为机构正向Jacobian 矩阵。同样,操作力和关节力的关系可表示为
J F J τT = (4.47)
假设非奇异,从式(4.45)、(4.46)和(4.47)中消去和J τq Δ,可得
F C x =Δ (4.48)
式中,是一个矩阵,称为机器的柔度矩阵。
T
-1
J JK C =m m ×从定义看出,柔度矩阵C 是一个对称矩阵,它不仅取决于每个驱动关节处的刚度,还受到Jacobian 矩阵的影响。由于Jacobian 矩阵依赖于位形,也依赖于位形。C 将操作力映射为终端变形量。给定操作力矢量C F ,可以根据式(4.48)计算终端位姿的变形量。
4.2.
5.2 刚度矩阵
当非奇异,柔度矩阵C 可逆。用左乘式(4.48)两端,可得
J -1
C x S F Δ = (4.49)
式中,,称为机器的刚度矩阵。
1T 1
???==KJ J C
S 显然,刚度矩阵也依赖于位形。我们可以使用类似于研究速度和静力的方法,考查在终端产生一个单位变形量,需要操作力的大小和方向。令
()()1T =x x ΔΔ (4.50)
将式(4.48)代入上式,可得
1 T T =CF C F (4.51)
在给定位形下,方程(4.27)表示一个m 维的力椭球,称为机构的刚度椭球。由于是一个对称的半正定矩阵,其特征向量正交。椭球的主轴沿特征向量方向,半轴长度等于特征值平方根的倒数。因此,要产生一个单位位移量的变形,所需最大和最小操作力分别是
C C T
C C T
min
1
λ和
max
1
λ,这里,min λ和max λ分别是的最小和最大的特征值。这两个操作
力的方向分别为C C T
min λ和max λ对应的特征向量和的方向。
min e max e 下面以平面2自由度机器人为例来说明刚度的计算过程。机构模型如图4.3所示。终端
变形和操作力分别为和[]T
,y x ΔΔΔ=x []T
,y
x f f =f 。将3.2.4部分求得的Jacobian 矩阵代
入式(4.48),可得柔度矩阵如下
?????
?
?
???????++?++??++?++=2122221212211212
12221122111221121212221122111221121222
21212211)(
))(())(( )( k s l k s l s l k c s l k c l c l s l s l k c s l k c l c l s l s l k s l k s l s l C (4.52) 式中,i i s θsin =,i i c θcos =,)sin(j i ij s θθ+=,)cos(j i ij c θθ+=。
令杆长m 21=l ,;m 12=l m N 121?==k k 。在01=θ,2
2π
θ=
的位形下,柔度矩
阵为
????
???
???=2 22 2 C (4.53)
因此
???
??????=6 2424 6 T
C C (4.54)
方程(4.51)可写为
122
343.022657.1162862
222=????????++?????????=+?y x
y x y y x x f f f f f f f f (4.55) 这个方程表示操作力空间的一个椭球体。的特征值是C C T
657.111=λ和343.02=λ。单位化后的特征向量为和。这两个特征向量与和轴的夹角为,它们构成了椭球的主轴。如图4.5所示,对应了机器刚度最弱的方向,在这个方向上,只要0.2929N 的力就可以产生1个单位的终端变形;对应了机器刚度最好的方向,在这个方向上,需要1.7075N 的力才能够产生1个单位的终端变形。也就是说,机构在最好和最弱的刚度方向上的刚度要相差相近6倍。
T
1]707.0 ,707.0[?=e T
2]707.0 ,707.0[=e x f y f °451e 2e
图4.5 平面2自由度串联机器人的刚度椭球
x
F 2
4.3 并联机器的静力学
相对于串联机构,由于存在多个闭环运动链,在并联机构的静力学分析中,4.2.2节介绍的迭代方法将不再适用。一般的研究方法是,针对每个支链建立力和力矩平衡方程,然后同时求解方程组系统。如果不需要求解各支链上的约束力,仅仅希望获得主动关节的驱动力或力矩时,虚功原理是最合适的方法。本节首先介绍基于力和力矩平衡方程的静力学分析方法,然后介绍基于虚功原理的方法。
4.3.1 基于力平衡方程的静力学分析
并联机构中存在着很多被动关节和被动构件,而这些构件大多是二力杆,即只承受拉力或压力,而不承受外力和外力矩。例如,在一个S-S 的空间二力杆中,如果杆件不受外力和外力矩,它就只承受拉力或压力,力的方向通过两个球关节的球心。这一事实对建立构件的力平衡方程很有帮助。
4.3.1.1 3RRR 平面并联机构的静力学分析
本节以平面3RRR 机构为例,阐述基于力平衡方程的静力学分析方法。
如图3.11所示,将支链i 的第一个构件作为输入构件,第二个构件作为被动构件。重力加速度垂直于平面。假设机构输出力和输出力矩矢量分别为
i a i b xy O ?[]
T
0,,y x f f =f (4.56) []T
,0,0z m =m (4.57)
如果不考虑重力的影响,被动构件相当于一个二力杆,作用于上的力为
i b i b
i
i
i i b f b f =
3,2,1=i (4.58) 式中,下标i 表示第i 个支链,表示作用于上的力的大小,(i f i b i b 3,2,1=i )分别表示矢量DA 、EB 和FC ,表示的模。
i b i b 将所有的作用于运动平台,可以获得如下方程:
i f [T
3
10,,y x i i
i i f f b f =∑
=b ]
(4.59) 将作用于运动平台上的所有力对G 点取矩,可得
[T
3
1,0,0z
i i
i i i m b f =×∑=b e ] (4.60) 式(4.59)和(4.60)可组成含有3个未知数的3个标量方程。这3个线性方程可以写成下面矩阵形式的方程:
??????????=?????????????????
?
??????????????z y x x y y x x y y x x y y x y y y x
x x m f f f f f b b e b e b b e b e b b e b e b b b b b b b b b b b b 321333332222211111332211332211 (4.61)
i e 和可通过前面的运动学分析计算得到。因此,已知输出力和力矩,3个未知力()可以通过式(4.61)的逆转换计算得到,这样,关节力矩就可以通过支链的力矩平衡方程获得,具体形式为
i b i
f 3,2,1=i i i i f a τ×= (4.62)
扩展上式,可得的大小为
i τ()
i
ix iy iy ix i i b b a b a f ?=
τ (4.63)
将式(4.61)和(4.63)中的消掉,可得
i f ??????????????
??????????
?
?????????????=????
??????321333333332222222211111111333332222211111333332222211111 τττx y y x x y y x x y y x x y y x x y y x x y y x x y y x y x y y x y x
y y x y x y y x x
x y y x x x y y x x z y x b a b a b e b e b a b a b e b e b a b a b e b e b a b a b b a b a b b a b a b b a b a b b a b a b b a b a b m f f (4.64) 式(4.64)就是机构的静力学方程,它给出了关节力和操作力之间的映射关系。如果给定
关节力,可根据式(4.64)直接计算操作力。如果指定操作力,就必须计算式(4.64)的逆转换。
4.3.1.2 Gough-Stewart 平台的静力学分析
如图2.45所示,基础坐标系{}{A xyz O ?}和运动坐标系}{B }{uvw P ?的原点O 和P 分别位于基础平台和运动平台的质心,的x 和y 轴与铰链点位于同一平面,的u 和v 轴与铰链点位于同一平面。假设重力影响可忽略不计。已知相对于运动平台质心的输出力和输出力矩m ,下面来计算各支链驱动力(}{A i A }{B i B f i f 6,,2,1L =i )
。 各支链上的移动关节所产生的力可看作是支链内力。由于支链是S-S 结构,支链可看作是一个二力杆,关节力的方向与长度方向重合。因此,各支链作用于运动平台上的力可表示为
i i B A i i i f s f = 6,,2,1L =i (4.65)
式中,下标i 表示第i 个支链,表示的大小,是一个由指向的单位矢量,可表示为
i f i f i s i A i B i
i
i d d s =
6,,2,1L =i (4.66) 式中,和分别为第i 个支链的矢量和长度。运动平台上的力平衡方程可写为
i d i d f s
=∑=6
1
i i
i f (4.67)
将作用于运动平台上的所有力对质心取矩,可得
m s
Rb =×∑=6
1
i i
i i
f (4.68)
式中,i i PB =b ,是相对于的姿态变换矩阵。式(4.67)和(4.68)包含有6个线性标量方程,可写成矩阵形式如下
R }{B }{A ???
?
?
???????????
??×××=??????621662211621 f f f M
L L s Rb s Rb s Rb s s s m f (4.69) 式(4.69)给出了末端执行器的操作力和关节驱动力之间的关系。通过前面的运动学分析,矢量和可获得。因此,给定关节驱动力,可按上式直接计算出终端操作力。如果给定操作力,需要计算式(4.69)的逆变换,才可获得关节驱动力。
i b i s
4.3.2 基于虚功原理的静力学分析
前面已经提到,并联机构存在两种类型的关节:主动关节和被动关节。假设关节之间无摩擦,重力影响可以忽略不计,则各被动关节处的作用力所做虚功为零。
令表示末端执行器的操作力矢量;[
T
T T
,m
f F =][]
T
2
1
,,,n
τττL =τ表示主动关节力
矩矢量;表示主动关节的虚位移矢量;[T
21,,n q q q δδδδL =q ][]T
,,δ?δδδL y x =x 表示末端
执行器的虚位移矢量。所有主动力做的虚功为0,即
0T T =?x F q τδδ (4.70)
并联机构中的q δ和x δ的关系可表示为
x J q δδ1?= (4.71)
式中,是机构的逆向Jacobian 矩阵,通常情况下,的解析表达式可以获得。
将式(4.71)代入式(4.70),可得
x q J J J
11
??=1?J 0)(T 1T =??x F J τδ (4.72)
因为上式对于任意虚位移x δ均成立,所以可以得到
0T 1T =??F J τ (4.73)
对上式取转置,可得
τJ F T ?= (4.74)
方程(4.74)给出了操作力和关节力之间的关系。给定关节力,可根据式(4.74)直接计算操作力τF ;如果给定一个操作力F ,则需要计算式(4.74)的逆变换。
4.3.2.1 3RRR 平面并联机构的静力学分析
下面仍然使用平面3RRR 机构为例,阐述基于虚功原理的静力学分析方法。 机构的输入关节速度矢量被定义为
[]
T 3
21,,θθθ&&&&=q (4.75) 末端执行器的速度矢量是
[]
T ,,?&&gy gx v v =x
(4.76) 根据3.3.3节中的推导,机构的两个Jacobian 矩阵分别为
????
?
???
?????=x y y x y x x y y x y x x y y x y x x b e b e b b b e b e b b b e b e b b 333333222222111111 J (4.77)
?
???????
?
????=x y y x x y y x x y y x q b a b a b a b a b a b a 333322221111 0 0 0 0 0
0 J (4.78)
假设,0≠×i i b a ,则机构的逆向Jacobian 矩阵为
?
?
??
?????????
??
???
?
?????????????==??x y y x x y y x x y y x y x y y x x x y y x x y y x x y y x y x y y x x x y y x x y y x x y y x y x
y y x x
x q b a b a b e b e b a b a b b a b a b b a b a b e b e b a b a b b a b a b b a b a b e b e b a b a b b a b a b 33333333333333333322222222222222222211111111111111111111
J J J (4.79) 将式(4.79)代入到式(4.74),可得
???????????
??????
???????????
?
?????????????=????
??????321333333332222222211111111333332222211111333332222211111 τττx y y x x y y x x y y x x y y x x y y x x y y x x y y x y x y y x y x y y x y x y y x x
x y y x x x y y x x z y x b a b a b e b e b a b a b e b e b a b a b e b e b a b a b b a b a b b a b a b b a b a b b a b a b b a b a b m f f (4.80) 可以看出,使用虚功原理得到的式(4.80)与使用力平衡方程求得的方程(4.64)完全相同。
4.3.2.2 Gough-Stewart 平台的静力学分析
下面应用虚功原理来考查Gough-Stewart 平台的刚度。 末端执行器的速度矢量被定义为
[]
T ,B p ωv x
=& (4.81) 输入关节速度可用6维矢量来表示,形式如下: q
&[]
T 6
21,,,d d d &L &&&=q (4.82) 根据3.3.6节的结论,机构的的两个Jacobian 矩阵分别为
()()()????
???
???????×××=T 66T 6
T
22T
2
T 11T 1 s Rb s s Rb s s Rb s J M M x (4.83) 66×=I J q (4.84)
因此,逆向Jacobian 矩阵为
x x q J J J J ==??1
1 (4.85)
将式(4.85)代入式(4.74),可得
???
?
?
?
??????????
??×××=??????621662211621 f f f M
L L s Rb s Rb s Rb s s s m f (4.86) 应用虚功原理得到的方程(4.86)与应用力平衡方程得到的方程(4.69)完全相同。 从前面的分析可看出,由于并联机构的逆向Jacobian 矩阵可解析表达,只要知道关节力矩,就可以很容易计算出终端承受的力和力矩,因此并联机构在多维力和力矩传感器中得到了广泛的应用。
4.3.3 关节力矩的确定
根据上两节的分析,如果忽略重力的影响,并将各关节视为理想约束的情况下,机构的逆向Jacobian 矩阵的转置矩阵反映了关节力矩向输出力矩的映射关系。一般情况下,机构的逆向Jacobian 矩阵可解析计算,因此,已知关节力矩求解输出力矩非常容易。但已知终端输出力矩求解关节力矩却比较困难,因为需要计算正向Jacobian 矩阵,而对于大多数并联机构来说,正向Jacobian 矩阵无法获得解析表达式。
一般的处理方法有三种。1. 直接利用机构的逆向Jacobian 矩阵,进行数值求逆;2.利用求解线性系统的数值方法,求解式(4.74)中的;3. 使用类似于正向运动学求解过程的迭代方法求解式(4.74)中的。下面仅简要介绍求解关节力矩的迭代方法。
ττ在求解线性方程组中,会将原方程组转化为一个迭代形式的方程。假设式(4.74)中的
是一个方阵,可表示为
T ?J n n ×??
??
??
?
?????=?nn n n n n J J J J J J J J J L M M M L L 2
122
22112111T
J (4.87) 这时,可以将划分为三个子阵,分别为
T
?J
??
??????
?
??
??
?
?
?=??n n n n J J J J ,1 ,12,21,1 0 0 0 0 0 0 0 0 0 0 0 0 L L M M O M M L L D
???
??
????
??
??????=?0 0 0 0 0 0 1,1,1,2n n n J J J L M M O M L L L ???
????
??
??
?
?
????=? 0 0 0 0 0 0 ,1,12,1L L M O M M L n n n J J J U 这样,式(4.74)就可以表示为
()F τU L D τ++= (4.88)
假如1
?D 存在,则
()F D τU L D τ11??++= (4.89)
这样,就将原方程写成了迭代形式:
j k j k c τT τ+=?1 (4.90)
式中,,。式(4.90)被称为Jacobi 迭代方程。
()U L D
T +=?1
j F D c 1?=j 如果将式(4.74)转化为
()F U ττL D +=? (4.91)
只要(存在,原方程可写成
)1
??L D ()()F L D U τL D τ1
1
???+?= (4.92)
写成了迭代形式为
g k g k c τT τ+=?1 (4.93)
式中,,。式(4.93)被称为Gauss-Seidel 迭代方程。
()U L D T 1
??=g ()F L D c 1
??=g
4.3.4 力椭球和阻力椭球
在设计一台并联机器时,一般会给定运动平台要承受的力和力矩,这时就需要计算能够提供这些力和力矩的最大的关节力矩,以选择合适的驱动器和被动关节。另外,如果驱动器和关节承受力矩的能力已经确定,就希望计算终端所能提供的最大输出力和力矩。
假设终端输出力矢量被限定为
1T ≤F F (4.94)
将式(4.74)代入上式,可得
1T 1T ≤??τJ J τ (4.95)
因此,在一个给定的机器位形下,关节力矩就被限制在一个椭球体内,该椭球被称作并联机器的力椭球。椭球的主轴方向是的特征向量的方向,半轴长度等于特征值的
平方根的倒数。力椭球最长轴方向上的点就表示机器在该位形下的最大关节力矩。
T
1
??J
J T
1??J
J 假设关节力矩矢量被限定为
1T ≤ττ (4.96)
将代入上式,可得
F J τT
=1T T ≤F JJ F (4.97)
可以看出,终端输出力矢量被限制在一个椭球体内,该椭球被称作并联机器的阻力椭球(resistivity ellipsoid )。椭球的主轴方向是的特征向量的方向,半轴长度等于特征值的平方根的倒数。阻力椭球最长轴方向上的点就表示机器在该位形下的最大输出力。
T
JJ T
JJ 值得注意的一点是,式(4.97)中的在很多情况下无法得到解析表达式,需要采用数值法获得。
J
4.4 并联机器的刚度分析
影响并联机器刚度的因素主要有以下几类: 1. 组成支链的各构件的结构和材料 2. 关节的刚度。
3. 基础平台和运动平台的刚度。
4. 机器的拓朴结构和几何构型。
5. 机器终端的位置和姿态。
6. 控制系统的刚度。
本节首先探讨理想状况下并联机构的刚度特性,也就是,假设组成机构的各构件均为刚体,不发生变形,机构发生变形的来源是传动机构和伺服系统。基于这种假设,机构的刚度模型得到很大程度的简化,因为各构件和关节的变形没有被考虑。这方面有代表性的工作有Gosselin (1990)、Kerr (1989)和Tahmasebi (1995)。在这种假设下得到的刚度矩阵被称为机构的理想刚度矩阵,这时的刚度模型被称为理想刚度模型。
本节第二部分将介绍引入了支链和基础平台弹性变形的刚度分析。多项研究已经证明,在建造高精密的并联机器时,由于基础平台变形而导致的末端执行器位置偏差是不应该被忽略的。这方面的代表性工作有黄田(2001)、汪劲松和李育文(2002)等。这种假设下得到的刚度矩阵称为理论刚度矩阵,这样的刚度模型被称为理论刚度模型。
基于有限元分析(FEA, Finite Element Analysis )的并联机器刚度研究已经非常普遍。本节第三部分介绍了基于有限元软件ANSYS 的刚度分析,对三种不同结构的并联机器的刚度进行了建模、计算和分析,最后,对该方法进行了简要的评价。
学号 班级 姓名 成绩 静力学部分 物体受力分析(一) 一、填空题 1、 作用于物体上的力,可沿 其作用线 移动到刚体内任一点,而不改变力对刚体的作用 效果。 2、 分析二力构件受力方位的理论依据是 二力平衡公理 . 3、 力的平行四边形法则,作用力与反作用力定律对__变形体___和____刚体__均适用,而 加减平衡力系公理只是用于__刚体____. 4、 图示AB 杆自重不计,在五个已知力作用下处于平衡。则作用于B 点的四个力的合力F R 的 大小R F =F ,方向沿F 的反方向__. 5、 如图(a)、(b )、(c )、所示三种情况下,力F 沿其作用线移至D 点,则影响A 、B 处的约束 力的是图___(c ) _______. (b ) (c ) 第4题图 第5题图 二、判断题 ( √ )1、力的可传性只适用于刚体,不适用于变形体。 ( × )2、凡是合力都比分力大。 ( √ )3、一刚体在两力的作用下保持平衡的充要条件是这两力等值、反向、共线。 ( × )4、等值、反向、共线的两个力一定是一对平衡力。 2 F 3
( √)5、二力构件约束反力作用线沿二力点连线,指向相对或背离。 三、改正下列各物体受力图中的错误 四、画出图中各物体的受力图,未画出重力的物体重量均不计,所有接触处为光滑接触。(必须 取分离体) N F B x F B y F Ax F A y F B F A F Ax F A y F Ax F A y F
(e) B F T F A F B F Ax F A y F C x F C y F A F Ax F A y F B F
一、实验目的 1.掌握用液式测压计测量流体静压强的技能。 2.验证不可压缩流体静力学基本方程,加深对位置水头、压力水头和测压管水头的理解。 3.观察真空度(负压)的产生过程,进一步加深对真空度的理解。 4.测定油的相对密度。 5.通过对诸多流体静力学现象的实验分析,进一步提高解决静力学实际问题的能力。 二、实验装置 本实验的装置如图1-1所示。 图1-1 流体静力学实验装置图 1. 测压管 ; 2. 带标尺的测压管 ; 3. 连通管 ; 4. 通气阀 ; 5. 加压打气球 ; 6. 真空测压管 ; 7. 截止阀 ; 8. U 型测压管 ; 9. 油柱 ; 10. 水柱 ;11. 减压放水阀 说明: (1)所有测压管液面标高均以标尺(测压管2)零读数为基准。 (2)仪器铭牌所注B ?,C ?,D ?系测点B ,C ,D 的标高。若同时取标尺零点作为静力学基本方程的基准,则B ?,C ?,D ?亦成为C z ,C z ,D z 。 (3) 本仪器中所有阀门旋柄均以顺管轴线为开。
三、实验原理 1.在重力作用下不可压缩流体静力学基本方程。 形式一: p z γ +=const (1-1-1a ) 形式二: P=P 。+γ (1-1-1b ) 式中 z---测点在基准面以上的位置高度; P —测点的静水压强(用相对压强表示,一下同); P 。--水箱中液面的表面压强; γ--液体的重度; h —测点的液体深度; 2.油密度测量原理。 当u 形管中水面与油水界面齐平(见图1-1-2),取油水界面为等压面时,有: P01=w γ=0γH (1-1-2) 另当U 形管中水面与油面平齐(见图1-1-3),取油水界面为等压面时,有: P02+W γH=0γH 即 P02=-w γh2=0γH-W γH (1-1-3) 图1-2 图1-3 四、实验要求 1.记录有关常数 实验装置编号No. 12 各测点的标尺读数为: B ?= 2.1 -210m ?; C ?= -2.9 -210m ?; D ?= -5.9 -210m ?; 基准面选在 测压管的0刻度线处 ; C z = -2.3 -210m ?; D z = -5.9 -210m ?; 2.分别求出各次测量时,A 、B 、C 、D 点的压强,并选择一基准验证同一
静力学分析报告 一、制作人员: 二、模型名称:桁架 三、创意来源: 四、模型视图: 五、模型简化
因为桁架本身由硬杆组成,所以简化结构 如下图所示,并求各点的受力情况。 假设桁架受到集中力G的影响 1以节点A为探究对象 m A F=0 F B Y?4?F?3=0 F B Y=0.75F F Y=0 F A Y+F B Y=0 F A Y=0.25F 2以节点B为探究对象 F12F13 B F B Y F Y=0 F13cos45°+F B Y=0 F13=?32 4 F F X=0 ?F13cos45°?F12=0 F12=?3 4 F
3以节点G为探究对象 F F10 G F11F13′ F Y=0 ?F13′cos45°?F?F11=0 F11=?0.25F F X=0 F13′cos45°?F10=0 F8=?0.75F 4以节点H为探究对象 F9F11′ F8 H F12′ F Y=0 F9cos45°+F11′=0 F9= 2 4 F F X=0 ?F9cos45°?F8+F12′=0 F8=0.5F 5以节点I为探究对象 F7 F6I F8′ F Y=0 F7=0
F X=0 ?F6+F8′=0 F6=0.5F 6以节点E为探究对象 F4E F10′ F5F7′F9′ F Y=0 F9′cos45°?F5cos45°=0 F5=2 F F X=0 ?F5cos45°+F9′cos45°?F4+F10′=0 F4=?0.25F 7以节点D为探究对象 F3F5′ F2 D F6′ F Y=0 F3+F5′cos45°=0 F3=1 4 F F X=0 F5′cos45°?F2+F6′=0 F4=0.25F 8以节点C为探究对象 C F4′
第一章静力学的基本概念和公理 一,填空题 1,力对物体的作用效果取决于力的,,,这三者称为力的三要素。 力的外效应是指力使物体的发生改变,力的内效应是指力使物体的发生改变。 力是物体间的相互作用,它可以使物体的_____________发生改变,或使物体产生___________。 2,物体的平衡是指物体相对于地球保持或状态。 3,在力的作用下和都保持不变的的物体称为刚体。 4,对物体的运动或运动趋势起限制作用的各种装置称为。 5,常见的铰链约束有和。 约束反力恒与约束所能限制的物体运动(趋势)方向。 6,刚体受到两个力作用而平衡,其充要条件是这两个力的大小, 作用线。 7,作用力和反作用力是两个物体间的相互作用力,它们一定,, 分别作用在。 作用在刚体上的力可沿其作用线任意移动,而_______________力对刚体的作用效果.所以,在静力学中,力是________________的矢量. 9力对物体的作用效果一般分为__________效应和___________效应. 10对非自由体的运动所预加的限制条件为_____________;约束反力的方向总是与约束所能阻止的物体的运动趋势的方向_____________;约束反力由_____力引起,且随_______________力的改变而改变. 9柔性约束对物体只有沿_________的___________力。 10,铰链约束分为_________和_________。 11,光滑面约束力必过_________沿_________并指向______________的物体。 12,活动铰链的约束反力必通过___________并与___________相垂直。 表示一个力对物体转动效果的度量称为_________,其数学表达式为_________。 14、力偶是指______________________________________________________。 15,力偶对物体的转动效应取决于_______________、________________、_______________三要素。 力偶对其作用平面内任何一点这矩恒等于它的_________,而与_________位置选择无关。 20、平面内两个力偶等效的条件是这两个力偶的__________________;平面力偶平衡的充要条件是___________________。 二,判断题:(判断正误并在括号内填√或×) 1,力的三要素中只要有一个要素不改变,则力对物体的作用效果就不变。( ) 2,刚体是客观存在的,无论施加多大的力,它的形状和大小始终保持不变。()3,如物体相对于地面保持静止或匀速运动状态,则物体处于平衡。( ) 4,作用在同一物体上的两个力,使物体处于平衡的必要和充分条件是: 这两个力大小相等、方向相反、沿同一条直线。( )
教案 专业:道路桥梁工程技术 课程:工程力学 教师:刘进朝 学期:2010-2011-1 教案首页 授课日期: 2010年 9 月 22 日授课班级:10211-10216
教学内容: 课题1 静力学基本知识与结构计算简图一、静力学基本概念
1.力的概念 ※定义:力是物体间相互的机械作用,这种作用使物体的运动状态发生改变和变形状态发生改变。 ※力的三要素:大小,方向,作用点 集中力:例汽车通过轮胎作用在桥面上的力。 2.力系的概念 定义——指作用在物体上的一群力。 根据力系中各力作用线的分布情况可将力系分为平面力系和空间力系两大类。 若两个力系分别作用于同一物体上时,其效应完全相同,则称这两个力系为等效力系。 用一个简单的等效力系(或一个力)代替一个复杂力系的过程称为力系的简化。 力系的简化是工程静力学的基本问题之一。 3.刚体的概念:指在力的作用下,大小和形状都不变的物体。 4.平衡的概念 平衡——指物体相对于惯性参考系保持静止或作匀速直线运动的状态。 二、静力学基本公理 公理1:二力平衡公理。 作用于刚体上的两个力,使刚体平衡的必要与充分条件是:这两个力大小相等,方向相反,作用线共线,作用于同一个物体上(如图所示)。 (a)(b) 注意:①对刚体来说,上面的条件是充要的②对变形体来说,上面的条件只是必要条件 例如,如图所示之绳索 二力构件(二力杆):在两个力的作用下保持平衡的构件。 例如,如图所示结构的直杆AB、曲杆AC就是二力杆。
(a)(b)(c) 公理2:加减平衡力系公理。 在作用于刚体的任意力系上,加上或减去任意平衡力系,并不改变原力系对刚体的作用效应。 加减平衡力系公理也只适用于刚体,而不能用于变形体。 推论1:力的可传性。 作用于刚体的力可沿其作用线移动而不致改变其对刚体的运动效应(既不改变移动效应,也不改变转动效应),如图所示。 因此,对刚体来说,力作用的三要素为:大小,方向,作用线 注意:(1)不能将力沿其作用线从作用刚体移到另一刚体。 (2)力的可传性原理只适用于刚体,不适用于变形体。 例如,如图(a)所示之直杆 (a)拉伸 (b)压缩 在考虑物体变形时,力失不得离开其作用点,是固定矢量。 公理3:力的平行四边形法则。 作用于物体上同一点的两个力可合成一个合力,此合力也作用于该点,合力的大小和方向由以原两力矢为邻边所构成的平行四边形的对角线来表示,如图(a)所示。 F R=F1+F2 力的平行四边形法则可以简化为三角形法则,如图(b)所示,
1.静力学基本概念 1.1力的概念 力是物体间相互机械作用。这种作用使物体的运动状态发生变化,同时使物体发生形变。前者称为力的运动效应;后者称为力的变形效应。 ?力的三要素 力对物体作用的效应,决定于力的大小、方向(包括方位和指向)、和作用点,这三个要素称为力的三要素。 ?力是一个矢量。(既有大小又有方向的量) ?力的单位:牛顿N、千牛KN ? 1.2等效力系 (1)力系作用在物体上力的集合,或作用在物体上若干个力的总称。 (2)等效力系作用于物体上的一个力系可用另一个力系代替,而不改变原力系对物体作用的外效应,以(F1,F2,...,F n )~(F1’,F2’,...,F m’)表示。 1.2 刚体的概念 任何物体在力的作用下,任意两点间均将产生相对运动,使其初始位置发生改变,称之为位移,从而导致物体发生变形。忽略物体变形时,将其抽象为刚体。 在静力学中以刚体为研究对象,在材料力学中则以变形体为研究对象。 1.3其它概念 静力学:是研究物体在力系作用下平衡规律的科学。 刚体静力学:研究刚体在力系作用下的平衡问题。 平衡:物体相对于地面保持静止或作匀速直线运动的状态。 平衡条件:要使物体处于平衡状态,作用于物体上的力系必须满足的条件。 平衡力系:作用于物体上正好使之保持平衡的力系。 1.4刚体静力学研究的基本问题 (1)受力分析-分析作用在物体上的各种力,弄清研究对象的受力情况。 (2)利用平衡条件求解未知力,以解决工程中的相关问题。 2.静力学公理 (1)二力平衡公理 (2)加减平衡力系公理 (3)力的平行四边形法则 (4)作用与反作用定律 (5)刚化公理 公理1 二力平衡公理 作用于刚体上的两个力,使刚体处于平衡状态的必要与充分条件是:这两个力大小相等、方向相反、作用在同一直线上(等值、反向、共线) 二力构件:只受两个力作用而处于平衡的物体。 公理2 加减平衡力系公理 在作用于刚体上的已知力系中,加上或减去任一平衡力系,并不改变原力系对刚体的效应。力的可传性原理: 作用于刚体上的力,可沿其作用线任意移动而不改变它对刚体的作用效应。 注意:力的可传性原理不适用于变形体 公理3 力的平行四边形法则 作用于物体上的两个力,其合力也作用在该点上,合力的大小和方向则由以这两个力为边所
静拉伸试验 一、实验目的 1、测45#钢的屈服强度s σ、抗拉强度m R 、断后伸长率δ和断面收缩率ψ。 2、测定铝合金的屈服强度s σ、抗拉强度m R 、断后伸长率δ和断面收缩率ψ。 3、观察并分析两种材料在拉伸过程中的各种现象。 二、使用设备 微机控制电子万能试验机、0.02mm 游标卡尺、试验分化器 三、试样 本试样采用经过机加工直径为10mm 左右的圆形截面比例试样,试样成分分别为铝合金和45#,各有数支。 四、实验原理 按照我国目前执行的国家 GB/T 228—2002标准—《金属材料 室温拉伸试验方法》的规定,在室温1035℃℃的范围内进行试验。将试样安装在试验机的夹头当中,然后开动试验机,使试样受到缓慢增加的拉力(一般应变速率应≤0.1m/s ),直到拉断为止,并且利用试验机的自动绘图装置绘出材料的拉伸图。 试验机自动绘图装置绘出的拉伸变形L ?主要是整个试样,而不仅仅是标距部分的伸长,还包括机器的弹性变形和试样在夹头中的滑动等因素,由于试样开始受力时,头部在头内的滑动较大,故绘出的拉伸图最初一段是曲线。 塑性材料与脆性材料的区别: (1)塑性材料: 脆性材料是指断后伸长率5%δ≥的材料,其从开始承受拉力直至试样被拉断,变形都比较大。塑性材料在发生断裂时,会发生明显的塑性变形,也会出现屈服和颈缩等现象; (2)脆性材料: 脆性材料是指断后伸长率5%δ<的材料,其从开始承受拉力直至试样被拉断,变形都很小。并且,大多数脆性材料在拉伸时的应力—应变曲线上都没有明显的直线段,几乎没有塑性变形,在断裂前不会出现明显的征兆,不会出现屈服和颈缩等现象,只有断裂时的应力值—强度极限。 脆性材料在承受拉力、变形记小时,就可以达到m F 而突然发生断裂,其抗拉强度也远远 小于45钢的抗拉强度。同样,由公式0m m R F S =即可得到其抗拉强度,而根据公式,10 l l l δ-=。 五、实验步骤 1、试样准备 用笔在试样间距0L (10cm )处标记一下。用游标尺测量出中间横截面的平均直径,并且测出试样在拉伸前的一个总长度L 。 2、试验机准备:
第一章 静力学基本概念与物体的受力分析 下列习题中,未画出重力的各物体的自重不计,所有接触面均为光滑接触。 1.1 试画出下列各物体(不包括销钉与支座)的受力图。 解:如图 (g) (j) P (a) (e) (f) W W F F A B F D F B F A F A T F B A 1.2画出下列各物体系统中各物体(不包括销钉与支座)以及物体系统整体受力图。 解:如图 F B B (b)
(c) C (d) D C F D (e) A F D (f) F D (g) (h) EO B O E F O (i)
(j) B Y F B X B F X E (k) 1.3铰链支架由两根杆AB、CD和滑轮、绳索等组成,如题1.3图所示。在定滑轮上吊有重为W的物体H。试分别画出定滑轮、杆CD、杆AB和整个支架的受力图。 解:如图 'F D 1.4题1.4图示齿轮传动系统,O1为主动轮,旋转 方向如图所示。试分别画出两齿轮的受力图。 解:
1 o x F 2 o x F 2 o y F o y F F F ' 1.5 结构如题1.5图所示,试画出各个部分的受力图。 解: 第二章 汇交力系 2.1 在刚体的A 点作用有四个平面汇交力。其中F 1=2kN ,F 2=3kN ,F 3=lkN , F 4=2.5kN ,方向如题2.1图所示。用解析法求该力系的合成结果。 解 0 0001 423cos30 cos45cos60cos45 1.29Rx F X F F F F KN = =+--=∑ 00001423sin30cos45sin60cos45 2.54Ry F Y F F F F KN ==-+-=∑ 2.85R F KN == 0(,)tan 63.07Ry R Rx F F X arc F ∠== 2.2 题2.2图所示固定环受三条绳的作用,已知F 1=1kN ,F 2=2kN ,F 3=l.5kN 。求该力系的合成结果。 解:2.2图示可简化为如右图所示 023cos60 2.75Rx F X F F KN ==+=∑ 013sin600.3Ry F Y F F KN ==-=-∑ 2.77R F KN ==
第一章静力学的基本概念 第一节力和平衡的概念 一、力的概念 力的运动效应和变形效应 1、力的定义:力是物体间的相互机械作用,这种作用使物体的运动状态或形状发生改变。 物体间的相互机械作用可分为两类:一类是物体间的直接接触的相互作用,另外一类是物和物体间的相互作用。 力的两种作用效应为: (1)外效应,也称为运动效应——使物体的运动状态发生改变; (2)内效应,也称为变形效应——使物体的形状发生变化。 静力学研究物体的外效应。 2、力的三个要素:力的大小、方向和作用点。 力的大小反映物体之间相互机械作用的强度,在国际单位制(SI)中,力的单位是牛(N);在工程单位制中,力的单位是千克力(kgf)。两种单位制之间力的换算关系为:1kgf=9.8N。 力的作用线:[力的方向是指静止物体在该力作用下可能产生的运动(或运动趋势)的方向。]沿该方向画出的直线。力的方向包含力的作用线在空间的方位和指向。 二、刚体和平衡的概念 刚体:在受力作用后而不产生变形的物体称为,刚体是对实际物体经过科学的抽象和简化而得到的一种理想模型。而当变形在所研究的问题中成为主要因素时(如在材料力学中研究变形杆件),一般就不能再把物体看作是刚体了。 平衡:指物体相对于地球保持静止或作匀速直线运动的状态。显然,平衡是机械运动的特殊形态,因为静止是暂时的、相对的,而运动才是永衡的、绝对的。 三、力系、等效力系、平衡力系 力系:作用在物体上的一组力。按照力系中各力作用线分布的不同形式, 力系可分为: (1)汇交力系力系中各力作用线汇交于一点; (2)力偶系力系中各力可以组成若干力偶或力系由若干力偶组成; (3)平行力系力系中各力作用线相互平行; (4)一般力系力系中各力作用线既不完全交于一点,也不完全相互平行。 按照各力作用线是否位于同一平面内,上述力系各自又可以分为平面力系和 空间力系两大类,如平面汇交力系、空间一般力系等等。 等效力系:两个力系对物体的作用效应相同,则称这两个力系互为等效力系。当一个力与一个力系等效时,则称该力为力系的合力;而该力系中的每一个力称为其合力的分力。把力系中的各个分力代换成合力的过程,称为力系的合成;反过来,把合力代换成若干分力的过程,称为力的分解。 平衡力系:若刚体在某力系作用下保持平衡。在平衡力系中,各力相互平衡,或者说,诸力对刚体产生的运动效应相互抵消。可见,平衡力系是对刚体作用效应等于零的力系。 第二节静力学基本公理 静力学公理是人们从实践中总结得出的最基本的力学规律,这些规律的正确性已为实
流体静力学实验报告 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
中国石油大学(华东)现代远程教育 工程流体力学实验报告学生姓名: 学号: 年级专业层次:16春网络春高起专 学习中心:山东济南明仁学习中心 提交时间:2016年5月30日
1.在重力作用下不可压缩流体静力学基本方程 形式之一:(1-1a) 形式之二:P=P0+γh(1-1b) 式中 Z——被测点在基准面以上的位置高度; P——被测点的静水压强,用相对压强表示,以下同; P0——水箱中液面的表面压强; ?γ ——液体重度; ?h——被测点的液体深度。 2.油密度测量原理 当U型管中水面与油水界面齐平(图1-2),取其顶面为等压面,有P01=γw h1=γ0HP01(1-2)另当U型管中水面和油面齐平(图1-3),取其油水界面为等压面,则有P02+γw H=γ0H 即P02=-γw h2=γ0H-γw H(1-3) 由(1-2)、(1-3)两式联解可得: ?代入式(1-2)得油的相对密度 ?(1-4) 据此可用仪器(不用另外尺)直接测得。 ?流型判别方法(奥齐思泽斯基方法):
本实验的装置如图1-1所示。 图1-1 流体静力学实验装置图 1.测压管; 2.带标尺的测压管; 3.连通管; 4.真空测压管;型测压管; 6.通气阀; 7.加压打气球; 8.截止阀; 9.油柱; 10.水柱; 11.减压放水阀 说明 1.所有测管液面标高均以标尺(测压管2)零读数为基准; 2.仪器铭牌所注、、系测点B、C、D标高;若同时取标尺零点作为静力学基本方程的基准, 则、、亦为、、; 3.本仪器中所有阀门旋柄顺管轴线为开。 四、实验步骤 1.搞清仪器组成及其用法。包括: (1)各阀门的开关; (2)加压方法:关闭所有阀门(包括截止阀),然后用打气球充气; (3)减压方法:开启筒底阀11放水; (4)检查仪器是否密封 加压后检查测管l、2、5液面高程是否恒定。若下降,表明漏气,应查明原因并加以处理。 2.记录仪器编号、各常数。 3.实验操作,记录并处理实验数据,见表1-1和表1-2。 4.量测点静压强。 (1)打开通气阀6(此时),记录水箱液面标高和测管2液面标高(此时);(
第一章静力学基本概念与物体的受力分析F列习题中,未画出重力的各物体的自重不计,所有接触面均为光滑接触。 1.1试画出下列各物体(不包括销钉与支座)的受力图。 解:如图 1.2画出下列各物体系统中各物体(不包括销钉与支座)以及物体系统整体受力图。解:如图 C
F D D C F C (C ) F D F A (e) (f) F D F E A F A F O A F12凉F 21 F F (g) (i) F EO W F O
1.3铰链支架由两根杆 AB 、CD 和滑轮、绳索等组成,如题 1.3图所示。在定滑轮上吊有重 为W 的物体H 。试分别画出定滑轮、杆 CD 、杆AB 和整个支架的受力图。 解:如图 1.4题1.4图示齿轮传动系统, O i 为主动轮,旋转 方向如图所示。试分别画出两齿轮的受力图。 解: 1.5结构如题1.5图所示,试画出各个部分的受力图。 解: (j) (k) F D 2y
第二章汇交力系 2.1在刚体的A点作用有四个平面汇交力。其中F i = 2kN, F2=3kN, F3=lkN, F4=2.5kN,方 向如题2.1图所示。用解析法求该力系的合成结果。 解F RX八X = R cos30°F4cos450-F2cos60°- F3cos45°=1.29KN F R y 二 ' Y = Rsin30°- F4 cos450F2 sin60°- F3 cos45°= 2.54KN F R- F:—F Ry =2.85KN .(F R,X) =arctan^ =63.07° 2.2题2.2图所示固定环受三条绳的作用,已知F i= 1kN, F2=2kN, F3=l.5kN。求 该力系的合 成结果。 解:2.2图示可简化为如右图所示 F RX八X = F2 F3COS600 =2.75KN F Ry八丫= R - F3 sin60°= -0.3KN F R - F RX F Ry =2.77KN F2 (F R,X)二arcta门邑二-6.20 F Rx 2.3 力系如题2.3 图所示。已知:F1= 100N , F2=50N, F3=50N, 求力系的合力。 解:2.3图示可简化为如右图所示 80 /BAC =二二arctan 530 60 F Rx二' X =F3 -F2co^ -80KN F Ry八丫二F2sin : -140KN F R - F Rx F Ry =161.25KN /(F R, X)二arctan 60.25° 2.4球重为W = 100N,悬挂于绳上,并与光滑墙相接触,如题 2.4图所示。已 知〉=30°, 试求绳所受的拉力及墙所受的压力。
一.分解合成的基本模型 1.二力合成 2.三力平衡 (合力0 F ) 二.受力分析的基本步骤 1.确定研究对象(整体法、隔离法) 2.具体受力分析(重力、弹力、摩擦力、其他力) 3.检验正误(把受力情况和运动情况作对比) 4.建立直角坐标系,列方程、解方程 F 1 F 2 F F 3 F 1 F 2
题型1.判断合力的范围 例1.N F 31=、N F 42=,求合力的范围。 分析:N F N 71≤≤ 例2.N F 31=、N F 42=,N F 53=,求合力的范围。 分析:N F 120≤≤ 练习1.N F 31=、N F 42=,N F 123=,求合力的范围。 练习 2.N F 31=,N F 42=,N F 53=,N F 71=,N F 92=,N F 113=,求合力的范围。 练习 3.N F 31=,N F 42=,N F 53=,N F 71=,N F 92=,N F 613=,求合力的范围。 题型2.求最小值和最小夹角 例1.已知合力F 的方向水平向右,分力N F 41=,方与水平向右的方向成?30夹角,求分力2F 的最小值为多少? 分析: 如图2F 取最小值时必与合力垂直,N F 2min 2= 练习1.已知分力N F 51=的方向水平向右,分力N F 32=,问分力2F 的方向为多少才能使合力与1F 的夹角最大? 题型3.整体法隔离法在受力分析中的灵活运用 例 1.如图,水平杆是粗糙的,竖直杆是光滑的。两个质量分别为1m 和2m 的小球穿在杆上,并用细线连在一起。当两个小球都平衡时,细线与竖直方向的夹角为θ,求: (1)1m 所受支持力为多大? (2)细线中的张力为多大? 分析:(1)整体分析 水平杆上小球所受支持力为g m m )(21+ F 1 F g m m )(21+ 1 N F 2 N F f F 1 m 2m
1 静力学基本知识 常见问题: 1.静力学研究的内容是什么? 答:静力学是研究物体在力系作用下处于平衡的规律。 2. 什么叫平衡力系? 答:在一般情况下,一个物体总是同时受到若干个力的作用。我们把作用于一物体上的两个或两个以上的力,称为力系。能使物体保持平衡的力系,称为平衡力系。 3.解释下列名词:平衡、力系的平衡条件、力系的简化或力系的合成、等效力系。 答:平衡:在一般工程问题中,物体相对于地球保持静止或作匀速直线运动,称为平衡。例如,房屋、水坝、桥梁相对于地球是保持静止的;在直线轨道上作匀速运动的火车,沿直线匀速起吊的建筑构件,它们相对于地球作匀速直线运动,这些物体本身保持着平衡。其共同特点,就是运动状态没有变化。 力系的平衡条件:讨论物体在力系作用下处于平衡时,力系所应该满足的条件,称为力系的平衡条件,这是静力学讨论的主要问题。 力系的简化或力系的合成:在讨论力系的平衡条件中,往往需要把作用在物体上的复杂的力系,用一个与原力系作用效果相同的简单的力系来代替,使得讨论平衡条件时比较方便,这种对力系作效果相同的代换,就称为力系的简化,或称为力系的合成。 等效力系:对物体作用效果相同的力系,称为等效力系。 4. 力的定义是什么?在建筑力学中,力的作用方式一般有两种情况? 答:力的定义:
力是物体之间的相互机械作用。这种作用的效果会使物体的运动状态发生变化(外效应),或者使物体发生变形(内效应)。 既然力是物体与物体之间的相互作用,因此,力不可能脱离物体而单独存在,有受力体时必定有施力体。 在建筑力学中,力的作用方式一般有两种情况,一种是两物体相互接触时,它们之间相互产生的拉力或压力;一种是物体与地球之间相互产生的吸引力,对物体来说,这吸引力就是重力。 5. 力的三要素是什么? 实践证明,力对物体的作用效果,取决于三个要素:(1)力的大小;(2)力的方向;(3)力的作用点。这三个要素通常称为力的三要素。 力的大小表明物体间相互作用的强烈程度。为了量度力的大小,我们必须规定力的单位,在国际单位制中,力的单位为N或kN。1 kN=1000 N 力的方向通常包含方位和指向两个涵义。如重力的方向是“铅垂向下”。 力的作用点指力对物体作用的位置。力的作用位置实际上有一定的范围,不过当作用范围与物体相比很小时,可近似地看作是一个点。作用于一点的力,称为集中力。 6.作用力和反作用力之间有什么关系? 答:若甲物体对乙物体有一个作用力,则同时乙物体对甲物体必有一个反作用力,这两个力大小相等、方向相反、并且沿着同一直线而相互作用。 作用力和反作用力是分别作用在两个物体上的力,任何作用在同一个物体上的两个力都不是作用力与反作用力。 7. 力的表示法如何? 答:力是一个有大小和方向的量,所以力是矢量。 通常可以用一段带箭头的线段来表示力的三要素。线段的长度(按选定的比
第一章 物体的受力分析和静力学平衡方程 1-1 两球自重为1G 和2G ,以绳悬挂如图。试画:(1)小球(2)大球(3)两球合在一起时的受力图。 答:(1)小球受力图: 约束来源:柔绳,光滑面。 (2)大球受力图: (3)两球受力图: 约束来源:柔绳,光滑面。 约束来源:柔绳。 1-2 某工厂用卷扬机带动加料车C 沿光滑 的斜轨上升到炉顶倒料,如图。已知料自 重为G ,斜轨倾角为α,试画加料车(连轮 A 及 B )的受力图。 答:
约束类型:光滑面,柔软体。 1-3 如图所示,试画出AB杆的受力图。 答: 三力汇交,A固定铰链,B可动铰链 1-4 棘轮装置如图所示。通过绳子悬挂重量 为G的物体,AB为棘轮的止推爪,B处为 平面铰链。试画出棘轮的受力图。 答: N A=N B二力杆,光滑面,柔绳,作用力与反作用力 1-6 化工厂中起吊反应器时为了不致破坏 栏杆,施加一水平力F,使反应器与栏杆 相离开(如图)。已至此时牵引绳与铅垂线
夹角为?30,反应器重量G 为30kN ,试求 水平力F 的大小和绳子的拉力T F 。 答:(1)选取研究对象:反应器 (2)取分离体,花受力图 (3)建立坐标系XOY (4)写平衡方程,联立解得 1-7 重量为G=2kN 的球搁在光滑的斜面上, 用一绳把它拉住(如图)。已知绳子与铅直 墙壁的夹角为?30,斜面与水平面的夹角为 ?15,求绳子的拉力和斜面对球的约束反力。 答:(1)研究对象:球 (2)受力图 (3)建立坐标系XOY (4)写平衡方程 ∑=??-??=030sin 15sin N 0X C A T , ???=15sin 30sin T N A C N 41.1215sin 30sin N 732.01-315cos 30sin 15sin 30cos 15sin 215cos 30sin 15sin 30cos 15sin 015cos 15sin 30sin 30cos 0 15cos 30cos T ,0Y A ==??===? ?+????=??+???==-??? ?? +??=-??+??=∑A C A A A c T N G T G T T G N
学号 _ _____________ 班级 ___________________ 姓名 ______________ 成绩 ________ 静力学部分 物体受力分析(一) 一、填空题 1、 作用于物体上的力,可沿 _其作用线—移动到刚体内任一点,而不改变力对刚体的作用 效果。 2、 分析二力构件受力方位的理论依据是 二力平衡公理 . 3、力的平行四边形法则,作用力与反作用力定律对 变形体—和 ______ 刚体 均适用,而 加减平衡力系公理只是用于 __刚体 4、图示AB 杆自重不计,在五个已知力作用下处于平衡。则作用于 B 点的四个力的合力 F R 的 大小F R = F_,方向沿F 的反方向 5、如图(a )、(b )、( c )、所示三种情况下,力 F 沿其作用线移至 D 点,则影响A 、B 处的约束 力的是图—(C ) ______ . 、判断题 (V )1、力的可传性只适用于刚体,不适用于变形体。 (X )2、凡是合力都比分力大。 (V )3、一刚体在两力的作用下保持平衡的充要条件是这两力等值、反向、共线。 (X )4、等值、反向、共线的两个力一定是一对平衡力。 第5题图 第4题图 (a) (b ) (c)
(V )5、二力构件约束反力作用线沿二力点连线,指向相对或背离。 、改正下列各物体受力图中的错误 四、画出图中各物体的受力图,未画出重力的物体重量均不计,所有接触处为光滑接触。 (必须 取分离体) ⑷ F Ay e 丿
B (f)(9 ) (h )
物体受力分析(二) 一、填空题 1、柔软绳索约束反力方向沿绳索方向丄背离 ________________ 物体? 2、光滑面约束反力方向沿_接触表面的公法线方向」__________指向物体? 3、光滑铰链、中间铰链有_1_个方向无法确定的约束反力,通常简化为方向确定的_2_个反力. 4、只受两个力作用而处于平衡的刚体,叫_二力—构件,反力方向沿_两点连线_ 二、画出以下指定物体的受力图? (c)
第一章静力学的基本概念和公理 一,填空题 1,力对物体的作用效果取决于力的,,,这三者称为力的三要素。力的外效应是指力使物体的发生改变,力的内效应是指力使物体的 发生改变。 力是物体间的相互作用,它可以使物体的_____________发生改变,或使物体产生___________。 2,物体的平衡是指物体相对于地球保持或状态。 3,在力的作用下和都保持不变的的物体称为刚体。 4,对物体的运动或运动趋势起限制作用的各种装置称为。 5,常见的铰链约束有和。 约束反力恒与约束所能限制的物体运动(趋势)方向。 6,刚体受到两个力作用而平衡,其充要条件是这两个力的大小, 作用线。 7,作用力和反作用力是两个物体间的相互作用力,它们一定,,分别作用在。 作用在刚体上的力可沿其作用线任意移动,而_______________力对刚体的作用效果.所以,在静力学中,力是________________的矢量. 9力对物体的作用效果一般分为__________效应和___________效应. 10对非自由体的运动所预加的限制条件为_____________;约束反力的方向总是与约束所能阻止的物体的运动趋势的方向_____________;约束反力由_____力引起,且随_______________力的改变而改变. 9柔性约束对物体只有沿_________的___________力。 10,铰链约束分为_________和_________。 11,光滑面约束力必过_________沿_________并指向______________的物体。 12,活动铰链的约束反力必通过___________并与___________相垂直。 表示一个力对物体转动效果的度量称为_________,其数学表达式为_________。 14、力偶是指______________________________________________________。 15,力偶对物体的转动效应取决于_______________、________________、 _______________三要素。 力偶对其作用平面内任何一点这矩恒等于它的_________,而与_________位置选择无关。20、平面内两个力偶等效的条件是这两个力偶的__________________;平面力偶平衡的充要条件是___________________。 二,判断题:(判断正误并在括号内填√或×) 1,力的三要素中只要有一个要素不改变,则力对物体的作用效果就不变。() 2,刚体是客观存在的,无论施加多大的力,它的形状和大小始终保持不变。() 3,如物体相对于地面保持静止或匀速运动状态,则物体处于平衡。( ) 4,作用在同一物体上的两个力,使物体处于平衡的必要和充分条件是: 这两个力大小相等、方向相反、沿同一条直线。( ) 5,静力学公理中,二力平衡公理和加减平衡力系公理适用于刚体。( ) 6,静力学公理中,作用力与反作用力公理和力的平行四边形公理适用于任何物体。( ) 静置在桌面上的粉笔盒,重量为G。桌面对粉笔盒的支持力N=G,说明G和N是一对作用力与反作用力。
学号_____________ 班级____________________ 姓名 _____________ 成绩_________ 静力学部分物体受力分析(一) 一、填空题 1、作用于物体上的力,可沿_其作用线—移动到刚体内任一点,而不改变力对刚体的作用效果。 2、分析二力构件受力方位的理论依据是_二力平衡公理_? 3、力的平行四边形法则,作用力与反作用力定律对变形体—和_____ 刚体均适用,而 加减平衡力系公理只是用于刚体 ___ ? 4、图示AB杆自重不计,在五个已知力作用下处于平衡。则作用于B点的四个力的合力F R的大 小F R =F,方向沿F的反方向 5、如图(a)、(b)、(c)、所示三种情况下,力F沿其作用线移至D点,则影响A、B处的约束力的 是图—(C)_________ ? 第4题图第5题图 、判断题 (V )1、力的可传性只适用于刚体,不适用于变形体。 (X )2、凡是合力都比分力大。 (V )3、一刚体在两力的作用下保持平衡的充要条件是这两力等值、反向、共线。 (X )4、等值、反向、共线的两个力一定是一对平衡力。
(V )5、二力构件约束反力作用线沿二力点连线,指向相对或背离。 、改正下列各物体受力图中的错误 四、画出图中各物体的受力图,未画出重力的物体重量均不计,所有接触处为光滑接 触。取分离体) (必须
F A F ey
8 -F C D A; L (9 )
学号_____________ 班级____________________ 姓名 ______________ 成绩 ________ 物体受力分析(二) 一、填空题 1、柔软绳索约束反力方向沿绳索方向丄背离_________________ 物体? 2、光滑面约束反力方向沿_接触表面的公法线方向」__________ 指向 _____ 物体? 3、光滑铰链、中间铰链有_1_个方向无法确定的约束反力,通常简化为方向确定的_2_个反力. 4、只受两个力作用而处于平衡的刚体,叫_二力—构件,反力方向沿_两点连线_ 二、画出以下指定物体的受力图? (^)
辽宁工程技术大学课程设计 课程大型工程分析软件及应用 题目平面桁架的静力分析 院系力学与工程学院 专业班级 学生姓名 学生学号 2018年01月07 日
力学与工程学院课程设计任务书 课程 大型工程分析软件及应用课程设计 题目 平面桁架的静力分析 专业 姓名 主要内容: 1、 小型铁路桥由横截面积为3250mm 2的钢制杆件组装而成。一辆火车停在桥上,EX=2.1×105MPa ,μ=0.3,ρ=7.8×103kg/m 3。试计算位置R 处由于载荷作用而沿水平方向移动的距离以及支反力,同时,分析各个节点的位移和单元应力。 2、 试件的几何参数 设计报告目录 a=1m a=1m a=1m b=1m R F2=280KN F1=210KN
第1章概述................................................................................................................... - 4 - 1.1 课程设计的意义、目的..................................................................................................... - 4 - 第2章 ANSYS详细设计步骤........................................................................................ - 4 - 2.1问题分析.............................................................................................................................. - 4 - 2.2基于ANSYS分析的步骤................................................................................................... - 4 - 2.2.1启动ANSYS,进入ANSYS界面........................................................................... - 5 - 2.2.2定义工作文件名和分析标题.................................................................................... - 5 - 2.2.3设定分析类型............................................................................................................ - 5 - 2.2.4选择单元类型............................................................................................................ - 5 - 2.2.5定义实常数................................................................................................................ - 6 - 2.2.6定义力学参数............................................................................................................ - 6 - 2.2.7存盘............................................................................................................................ - 7 - 2.2.8创建关键点先、线.................................................................................................... - 7 - 2.2.9设置、划分网格........................................................................................................ - 9 - 2.2.10施加荷载并求解.................................................................................................... - 11 - 第3章设计结果及分析............................................................................................. - 14 - 3.1显示桁架变形图................................................................................................................. - 14 - 3.2列表显示节点解................................................................................................................. - 15 - 3.3上述分析对应的命令流如下:......................................................................................... - 16 - 结论............................................................................................................................... - 18 - 心得体会....................................................................................................................... - 18 - 参考文献....................................................................................................................... - 19 - 设计报告