第二章 计算方法及其基本原理介绍 化学反应的本质就是旧键的断裂与新建的形成,参与成键原子的电子壳层重新组合就是导致生成稳定多原子化学键的明显特征。因此阐述化学键的理论应当描写电子壳层的相互作用与重排,借助求解满足适当的Schrodinger 方程的波函数描写分子中电子分布的量子力学,为解决这一问题提供了一般的方法,然而,对于一些实际的体系,不引入一些近似,就不可能求解其Schrodinger 方程。这些近似使一般量子力学方程简化为现代电子计算机可以求解的方程。这些近似与关于分子波函数的方程形成计算量子化学的数学基础。 2、1 SCF-MO 方法的基本原理 分子轨道的自洽场计算方法 (SCF-MO)就是各种计算方法的理论基础与核心部分,因此在介绍本文计算工作所用方法之前,有必要对其关键的部分作一简要阐述。 2、1、1 Schrodinger 方程及一些基本近似 为了后面介绍各种具体在自洽场分子轨道(SCF MO)方法方便,这里将主要阐明用于本文量子化学计算的一些重要的基本近似,给出SCF MO 方法的一些基本方程,并对这些方程作简略说明,因为在大量的文献与教材中对这些方程已有系统的推导与阐述[1-5]。 确定任何一个分子的可能稳定状态的电子结构与性质,在非相对论近似下,须求解 R AB =R 图2-1分子体系的坐标
定态Schrodinger 方程 ''12121212122ψψT p B A q p A p pA A pq AB B A p A A A E R Z r R Z Z M =??????? ?-++?-?-∑∑∑∑∑∑≠≠ (2、1) 其中分子波函数依赖于电子与原子核的坐标,Hamilton 算符包含了电子p 的动能与电子p 与q 的静电排斥算符, ∑∑≠+?-=p q p pq p e r H 12121?2 (2、2) 以及原子核的动能 ∑?-=A A A N M H 2121? (2、3) 与电子与核的相互作用及核排斥能 ∑∑≠+-=p A B A AB B A pA A eN R Z Z r Z H ,21? (2、4) 式中Z A 与M A 就是原子核A 的电荷与质量,r pq =|r p -r q |,r pA =|r p -R A |与R AB =|R A -R B |分别就是电子p 与q 、核A 与电子p 及核A 与B 间的距离(均以原子单位表示之)。上述分子坐标系如图2、1所示。可以用V(R,r)代表(2、2)-(2、4)式中所有位能项之与 ∑∑∑-+=≠≠p A pA A B A q p pq AB B A r Z r R Z Z r R V ,1 2121),( (2、5) 原子单位 上述的Schrodinger 方程与Hamilton 算符就是以原子单位表示的,这样表示的优点在于简化书写型式与避免不必要的常数重复计算。在原子单位的表示中,长度的原子单位就是Bohr 半径
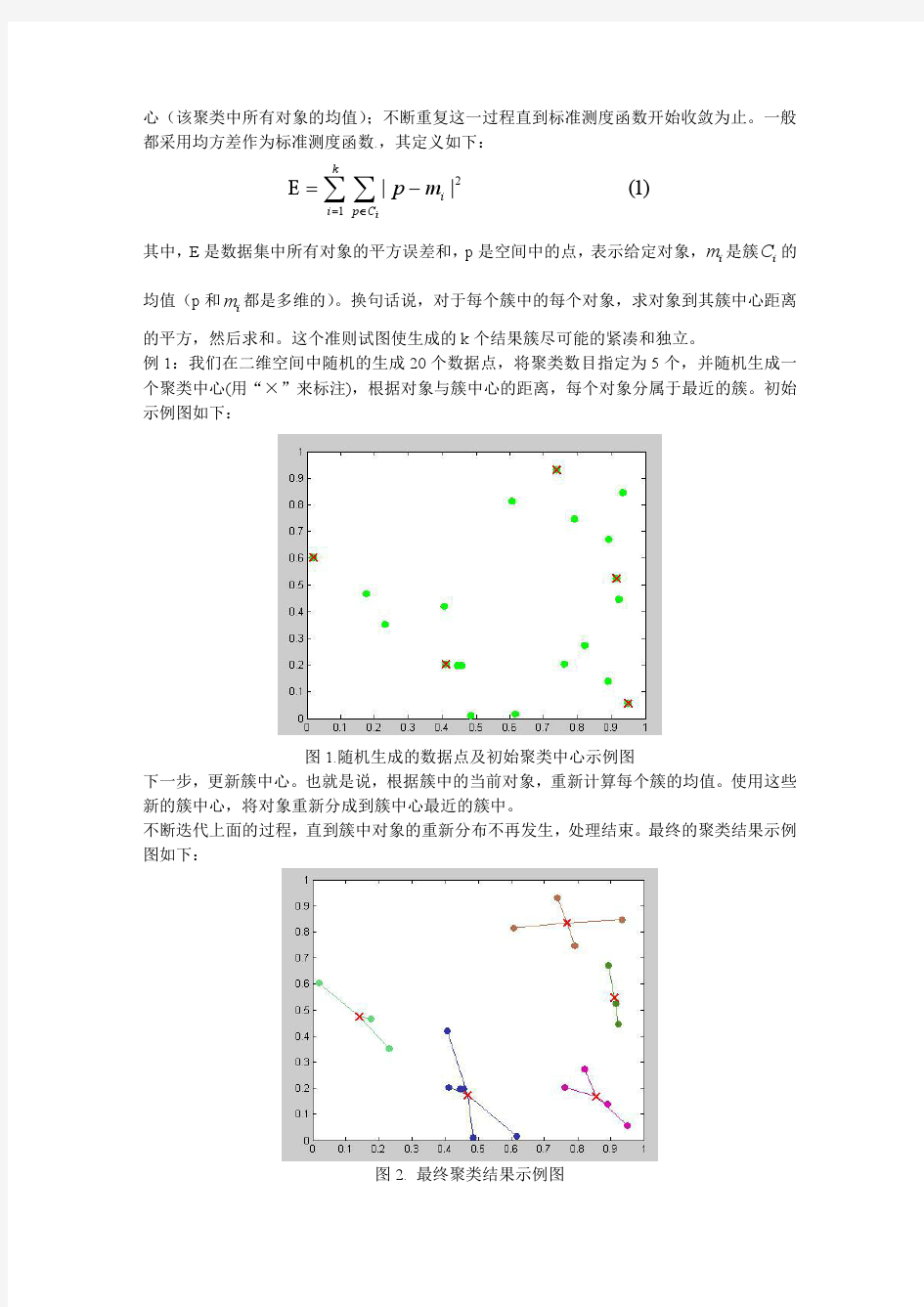
蚁群算法简述及实现 1 蚁群算法的原理分析 蚁群算法是受自然界中真实蚁群算法的集体觅食行为的启发而发展起来的一种基于群体的模拟进化算法,属于随机搜索算法,所以它更恰当的名字应该叫“人工蚁群算法”,我们一般简称为蚁群算法。M.Dorigo等人充分的利用了蚁群搜索食物的过程与著名的TSP问题的相似性,通过人工模拟蚁群搜索食物的行为来求解TSP问题。 蚂蚁这种社会性动物,虽然个体行为及其简单,但是由这些简单个体所组成的群体却表现出及其复杂的行为特征。这是因为蚂蚁在寻找食物时,能在其经过的路径上释放一种叫做信息素的物质,使得一定范围内的其他蚂蚁能够感觉到这种物质,且倾向于朝着该物质强度高的方向移动。蚁群的集体行为表现为一种正反馈现象,蚁群这种选择路径的行为过程称之为自催化行为。由于其原理是一种正反馈机制,因此也可以把蚁群的行为理解成所谓的增强型学习系统(Reinforcement Learning System)。 引用M.Dorigo所举的例子来说明蚁群发现最短路径的原理和机制,见图1所示。假设D 和H之间、B和H之间以及B和D之间(通过C)的距离为1,C位于D和B的中央(见图1(a))。现在我们考虑在等间隔等离散世界时间点(t=0,1,2……)的蚁群系统情况。假设每单位时间有30只蚂蚁从A到B,另三十只蚂蚁从E到D,其行走速度都为1(一个单位时间所走距离为1),在行走时,一只蚂蚁可在时刻t留下浓度为1的信息素。为简单起见,设信息素在时间区间(t+1,t+2)的中点(t+1.5)时刻瞬时完全挥发。在t=0时刻无任何信息素,但分别有30只蚂蚁在B、30只蚂蚁在D等待出发。它们选择走哪一条路径是完全随机的,因此在两个节点上蚁群可各自一分为二,走两个方向。但在t=1时刻,从A到B的30只蚂蚁在通向H的路径上(见图1(b))发现一条浓度为15的信息素,这是由15只从B走向H的先行蚂蚁留下来的;而在通向C的路径上它们可以发现一条浓度为30的信息素路径,这是由15只走向BC的路径的蚂蚁所留下的气息与15只从D经C到达B留下的气息之和(图1(c))。这时,选择路径的概率就有了偏差,向C走的蚂蚁数将是向H走的蚂蚁数的2倍。对于从E到D来的蚂蚁也是如此。 (a)(b)(c) 图1 蚁群路径搜索实例 这个过程一直会持续到所有的蚂蚁最终都选择了最短的路径为止。 这样,我们就可以理解蚁群算法的基本思想:如果在给定点,一只蚂蚁要在不同的路径中选择,那么,那些被先行蚂蚁大量选择的路径(也就是信息素留存较浓的路径)被选中的概率就更大,较多的信息素意味着较短的路径,也就意味着较好的问题回答。
2012研究生机器视觉课程检测及课程设计内容 一、回答下列问题: 1、什么是机器视觉,它的目标是什么?能否画出机器视觉检测系统的结构方 块图,并说出它们的工作过程原理和与人类视觉的关系? 机器视觉是机器(通常指计算机)对图像进行自动处理并报告“图像中有什么”的过程,也就是说它识别图像中的内容。图像中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。 原始数据特征向量类别标识 特征度量模式分类器 机器视觉系统的组成框图 2、在机器视觉检测技术中:什么是点视觉技术、一维视觉技术、二维视觉技 术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等? 能否说出他们的应用领域病句、案例?能否描述它们的技术特点? 答:点视觉:用一个独立变量表示的视觉称之为点视觉。如应用位移传感器测量物体的移动速度。 一维视觉:普通的CCD。 两维视觉:用两个独立变量表示的视觉称之为两维视觉。比如普通的CCD。 三维视觉:用三个独立变量表示的视觉称之为三维视觉。比如用两个相机拍摄(双目视觉);或者使用一个相机和一个辅助光源。 彩色视觉:用颜色作为变量的视觉称之为彩色视觉。物体的颜色是由照 射光源的光谱成分、光线在物体上反射和吸收的情况决定的。比如,一 个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光 反射出来,而吸收了光谱中的其他部分的光谱,而同样的蓝色物体, 在红色的光源照射下,则呈现红紫色, 非可见光视觉技术:用非可见光作为光源的视觉技术。比如非可见光成像技术。
3、机器视觉检测技术中:光源的种类有哪些?不同光源的特点是什么?光照 方式有几种?不同光照方式的用途是什么?又和技术特点和要求? 机器视觉检测技术中光源有以下几种:荧光灯,卤素灯+光纤导管,LED 光源,激光,紫外光等。几种光源的特点如下: 成本亮度稳定度使用寿命复杂设计温度影响种类名 称 荧光灯低差差一般低一般 卤素灯+光纤导管高好一般差一般差LED光源一般一般好好高低光照方式有以下几种: 背景光法(背光照射)是将被测物置于相机和光源之间。这种照明方式的优点是可将被测物的边缘轮廓清晰地勾勒出来。由于在图像中,被测物所遮挡的部分为黑色,而未遮挡的部分为白色,因此形成“黑白分明”的易于系统分析的图像。此方法被应用于90%的测量系统中。 前景光法(正面照射)是将灯源置于被测物和相机之前。又可分为明场照射和暗场照射。明场照射是为了获得物体的几乎全部信息,照射物体的光在视野范围之内几乎全部反射回去;暗场照射是为了获取物体表面的凹凸,照射物体的光在视野范围之外有部分光反射回去。 同轴光法是将灯源置于被测物和相机之间。 4、机器视觉检测系统中,光学系统的作用是什么?光学器件有哪几种,它们 各自的作用是什么?光学镜头有几种类型,它们各自有何用途?光学镜头有哪些技术参数,各自对测量有什么影响? 答:机器视觉检测系统中,光学系统用来采集物体的轮廓、色彩等信息。 光学器件主要有:镜头、成像器件(CCD和CMOS)、光圈、快门等。 镜头的作用是对成像光线进行调焦等处理,使成像更清晰;成像器件的作用是将光学图像转换成模拟电信号;光圈的作用如同人得瞳孔, 控制入射光的入射量,实现曝光平衡;快门的作用是将想要获取的光学
机器视觉算法开发软件----HALCON HALCON是世界范围内广泛使用的机器视觉软件,用户可以利用其开放式结构快速开发图像处理和机器视觉软件。 HALCON提供交互式的编程环境HDevelop。可在Windows,Linux,Unix下使用,使用HDevelop可使用户快速有效的解决图像处理问题。HDevelop含有多个对话框工具,实时交互检查图像的性质,比如灰度直方图,区域特征直方图,放大缩小等,并能用颜色标识动态显示任意特征阈值分割的效果,快速准确的为程序找到合适的参数设置。HDevelop程序提供进程,语法检查,建议参数值设置,可在任意位置开始或结束,动态跟踪所有控制变量和图标变量,以便查看每一步的处理效果。当用户对于机器视觉编程代码完成后,HDevelop可将此部分代码直接转化为C++,C或VB源代码,以方便将其集成到应用系统中。 HALCON提供交互式的模板描述文件生成工具HmatchIt,。可交互式地为一个模型定义一个任意形状的感性趣区域,HmatchIt优化给出此创建模型的合适参数, 自动生成模板描述文件以供程序调用,快速为基于形状匹配和结构匹配的用户找到实现目标识别和匹配应用的合适的参数设置。 HALCON提供支持多CPU处理器的交互式并行编程环境Paralell Develop, 其继承了单处理器板HDevelop的所有特点,在多处理器计算机上会自动将数据比如图像分配给多个线程,每一个线程对应一个处理器,用户无需改动已有的HALCON程序,就立即获得显
著的速度提升。 HALCON中HDevelop Demo中包含680个应用案例,根据不同的工业领域,不同的用法和算法分类列出,用户可以根据自己的需求方便的找到相对应的类似案例,快速掌握其函数用法。 HALCON提供的函数使用说明文档,详细介绍每个函数的功能和参数用法,提供在不用开发语言(VC,VB,.NET等)下的开发手册,而且提供一些算法(例如3D)的原理性介绍,给用户的学习提供帮助。 特点:原型化的开发平台,自动语法检查; 动态察看控制和图标变量; 支持多种操作系统; 支持多CPU; 支持多种文件格式; 自动语言转化功能; 与硬件无关,可支持各种硬件; 应用领域:医学图像分析; 2D/3D测量; 立体视觉; 匹配定位; 光学字符识别; Blob分析;
机器视觉 基于visual C++ 的数字图像处理
摘要 机器视觉就是用机器代替人眼来做测量和判断。它通过图像摄取装置将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来获取信息。本文主要介绍的是数字图像处理中的一些简单应用,通过对图像进行滤波、增强、灰度变换、提取特征等处理来获取图像的信息,达到使图像更清晰或提取有用信息的目的。 关键字:机器视觉、灰度图处理、滤波、边缘提取、连通区域
目录 摘要 (2) 目录 (3) 1 概述 (4) 2技术路线 (4) 3实现方法 (5) 3.1灰度图转换 (5) 3.2 直方图均衡化 (6) 3.3均值滤波和中值滤波 (6) 3.4灰度变换 (7) 3.5拉普拉斯算子 (8) 4 轮廓提取 (9) 5 数米粒数目 (15) 6 存在的问题 ................................................................................................ 错误!未定义书签。 7 总结 ............................................................................................................ 错误!未定义书签。 8 致谢 ............................................................................................................ 错误!未定义书签。参考文献 . (17)
蚁群算法浅析 摘要:介绍了什么是蚁群算法,蚁群算法的种类,对四种不同的蚁群算法进行了分析对比。详细阐述了蚁群算法的基本原理,将其应用于旅行商问题,有效地解决了问题。通过对旅行商问题C++模拟仿真程序的详细分析,更加深刻地理解与掌握了蚁群算法。 关键词:蚁群算法;旅行商问题;信息素;轮盘选择 一、引言 蚁群算法(Ant Colony Optimization, ACO),是一种用来在图中寻找优化路径的算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。蚁群算法是一种模拟进化算法,初步的研究表明该算法具有许多优良的性质。 蚁群算法成功解决了旅行商问题(Traveling Salesman Problem, TSP):一个商人要到若干城市推销物品,从一个城市出发要到达其他各城市一次而且最多一次最后又回到第一个城市。寻找一条最短路径,使他从起点的城市到达所有城市一遍,最后回到起点的总路程最短。若把每个城市看成是图上的节点,那么旅行商问题就是在N个节点的完全图上寻找一条花费最少的回路。 最基本的蚁群算法见第二节。目前典型的蚁群算法有随机蚁群算法、排序蚁群算法和最大最小蚁群算法,其中后两种蚁群算法是对前一种的优化。本文将终点介绍随机蚁群算法。 二、基本蚁群算法 (一)算法思想 各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种信息素,信息素多的地方显然经过这里的蚂蚁会多,因而会有更多的蚂蚁聚集过来。假设有两条路从窝通向食物,开始的时候,走这两条路的蚂蚁数量同样多(或者较长的路上蚂蚁多,这也无关紧要)。当蚂蚁沿着一条路到达终点以后会马上返回来,这样,短的路蚂蚁来回一次的时间就短,这也意味着重复的频率就快,因而在单位时间里走过的蚂蚁数目就多,洒下的信息素自然也会多,自然会有更多的蚂蚁被吸引过来,从而洒下更多的信息素。因此,越来越多地蚂蚁聚集到较短的路径上来,最短的路径就找到了。 蚁群算法的基本思想如下图表示:
1.什么是机器视觉 【概述】 机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和 CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。 正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。【基本构造】 一个典型的工业机器视觉系统包括:光源、镜头、 CCD 照相机、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯 / 输入输出单元等。 系统可再分为: 主端电脑(Host Computer) 影像撷取卡(Frame Grabber)与影像处理器影像摄影机 CCTV镜头显微镜头照明设备: Halogen光源 LED光源 高周波萤光灯源闪光灯源其他特殊光源影像显示器 LCD 机构及控制系统 PLC、PC-Base控制器 精密桌台伺服运动机台 【工作原理】 机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格 / 不合格、有 / 无等,实现自动识别功能。 【机器视觉系统的典型结构】 一个典型的机器视觉系统包括以下五大块: 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。光源可分为可见光和不可见光。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。 2.镜头FOV(Field Of Vision)=所需分辨率*亚象素*相机尺寸/PRTM(零件测量公差比)镜头选择应注意: ①焦距②目标高度③影像高度④放大倍数⑤影像至目标的距离⑥中心点 / 节点⑦畸变 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD和面阵CCD;单色相机和彩色相机。 4.图像采集卡 图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等等。 比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理。有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。 5.视觉处理器 视觉处理器集采集卡与处理器于一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务。现在由于采集
1、相机的信噪比、SNR=1时(光强可探测到的最小光强,绝对灵敏度),动态增益为光强.sat/光强.min(dB/位),量子效率是波长的函数:η=η(λ)--CCD比CMOS灵敏,动态范围大。 2、数据结构:图像、区域和亚像素轮廓 图像:彩色摄像机采集的是每个像素对应的三个采样结果(RGB三通道图像)、图像通道可被看作一个二维数组,设计语言中的表示图像的数据结构;两种约定:离散函数(点对点)R→R n、连续函数:R2→R n。 区域:可以表示一幅图像中一个任意的像素子集,区域定义为离散平面的一个任意子集:R ∈Z2,将图像处理闲置在某一特定的感兴趣区域(一幅图像可被看作图像所有像素点的矩形感兴趣区域)。二值图像特征区域:用1表示在区域内的点,用0表示不在区域内的点;行程表示法:每次行程的最小量的数据表示行程的纵坐标、行程开始和行程结束对应横坐标值。行程编码较二值图像节省存储空间(行程编码保存在16位整数,须要24个字节,而采用二值图像描述区域,每个像素点占1个字节,则有35个字节)。行程编码保存的只是区域的边界。为描述多个区域,采用链表或数组来保存采用形成编码描述的多个区域,每个区域的信息是被独立保存和处理的。 亚像素轮廓:比像素分辨率更高的精度(亚像素阈值分割或亚像素边缘提取)。轮廓基本上可被描述成多表型,然后用排序来说明哪些控制点是彼此相连的,在计算机里,轮廓只是用浮点数表示的横和纵坐标所构成的数组来表示。 3、图像增强:硬件采集的图像质量不好,可应用软件进行增强。 灰度值变换:由于光源照明的影响,局部的图像会产生对比度与设定值不一致,需要局部的去增强对比度。为提高变换速度,灰度值变换通常通过查找表(LUT)来进行(将灰度输入值变换后输出保存到查找表中),最重要的灰度值变换是线性灰度值比例缩放:f(g)=ag+b(ag 表示对比度,b表示亮度)。为了自动获取图像灰度值变换参数a、b的值,通过图像感兴趣区域的最大与最小灰度值设置出a、b的值(灰度值归一化处理)。灰度直方图表示某一灰度值i出现的概率。对于存在很亮和很暗的区域,图像归一化时需要去除一小部分最暗、最亮的灰度值(用2个水平线截取区域),再进行图像归一化处理,将对比度提高(鲁棒的灰度归一化处理)。 辐射标定:传感器收集的能量与图像实际灰度值的关系是非线性时候(一般需要是线性的,提高某些处理算法的精确度),对非线性相应求其逆响应的过程就是辐射标定。取q=?对响应函数求逆运算得到线性响应,求q的过程既是标定。 图像平滑:抑制由于多种原因产生的图像噪声(随即灰度值)。干扰后灰度值=图像灰度值+噪声信号(将噪声看作是针对每个像素平均值为0且方差是б2的随机变量),降噪方法之一、时域平均法,采集多幅图像进行平均,标准偏差将为原来的1/根号n,求的平均值后,将任意一幅图像减去平均,即为该幅图像的噪声;方法之二、空间平均操作法,通过像素数(2n+1)*(2m+1)的一个窗口进行平均操作,会使边缘模糊(计算量非常大,进行(2n+1)*(2m+1)次操作);方法之三、递归滤波器,在前一个计算出的值的基础上计算出新的值,较方法一速度快了30倍;满足所有准则(平滑程度准则t,以及XXs滤波)的高斯滤波器:高斯滤波器是可分的,所以可以非常高效率的被计算出来,能够更好地抑制高频部分。若更关注质量,则应采用高斯滤波器;若关注执行速度,首选使用均值滤波器。 傅里叶变换:将图像函数从空间域转变到频率域,可以再进行频率高低的滤波操作平滑。 4、插值算法:图像被放大不清晰时,通过插值增加放大的增多的像素
(计算智能大作业) 应用蚁群算法求解TSP问题
目录 蚁群算法求解TSP问题 (3) 摘要: (3) 关键词: (3) 一、引言 (3) 二、蚁群算法原理 (4) 三、蚁群算法解决TSP问题 (7) 四、解决n个城市的TSP问题的算法步骤 (9) 五、程序实现 (11) 六、蚁群算法优缺点分析及展望 (18) 七、总结 (18)
采用蚁群算法解决TSP问题 摘要:蚁群算法是通过蚂蚁觅食而发展出的一种新的启发算法,该算法已经成功的解决了诸如TSP问题。本文简要学习探讨了蚂蚁算法和TSP问题的基本内容,尝试通过matlab 仿真解决一个实例问题。 关键词:蚁群算法;TSP问题;matlab。 一、引言 TSP(Travelling Salesman Problem)又称货郎担或巡回售货员问题。TSP问题可以描述为:有N个城市,一售货员从起始城市出发,访问所有的城市一次,最后回到起始城市,求最短路径。TSP问题除了具有明显的实际意义外,有许多问题都可以归结为TSP问题。目前针对这一问题已有许多解法,如穷举搜索法(Exhaustive Search Method), 贪心法(Greedy Method), 动态规划法(Dynamic Programming Method)分支界定法(Branch-And-Bound),遗传算法(Genetic Agorithm)模拟退火法(simulated annealing),禁忌搜索。本文介绍了一种求解TSP问题的算法—蚁群算法,并通过matlab仿真求解50个城市之间的最短距离,经过仿真试验,证明是一种解决TSP问题有效的方法。
数字图像处理与机器视觉 2015-2016期末试卷参考答案南昌大学研究生2015,2016年第2学期期末考试试卷 试卷编号: (开)卷课程名称: 数字图像处理与机器视觉适用班级: 2015级硕士研究生姓名: 学号: 专业: 学院: 机电工程学院考试日期: 题号一二三四五六七八九十总分累分人 签名题分 10 15 15 10 20 30 100 得分 考生注意事项:1、本试卷共4页,请查看试卷中是否有缺页或破损。如有请报告以便更换。 2、使用A4答题纸,注意装订线。 一、单项选择题(从下列各题四个备选答案中选出一个正确答案,并将其 代号填在题前的括号内。每小题1分,共10分) ( b )1.图像与灰度直方图间的对应关系是: a.一一对应 b.多对一 c.一对多 d.都不对 ( d )2. 下列算法中属于图象平滑处理的是: a.Hough变换法 b.状态法 c.高通滤波 d. 中值滤波 ( c )3.下列算法中属于图象锐化处理的是: a.局部平均法 b.最均匀平滑法 c.高通滤波 d. 中值滤波 ( d )4. 下列图象边缘增强算子中对噪声最敏感的是: a.梯度算子 b.Prewitt算子 c.Roberts算子 d. Laplacian算子 ( b )5. 下列算法中属于点处理的是: a.梯度锐化 b.二值化 c.傅立叶变换 d.中值滤波 ( d )6.下列算子中利用边缘灰度变化的二阶导数特性检测边缘的是:
a.梯度算子 b.Prewitt算子 c.Roberts算子 d. Laplacian算子 ( c )7.将灰度图像转换成二值图像的命令为: a.ind2gray b.ind2rgb c.im2bw d.ind2bw ( d )8.数字图像处理的研究内容不包括: a.图像数字化 b.图像增强 c.图像分割 d.数字图像存储 ( d )9.对一幅100?100像元的图象,若每像元用,bit表示其灰度值,经霍夫曼编码后图象的压缩比为2:1,则压缩图象的数据量为: a.2500bit b.20000bit c.5000bit d.40000bit ( b )10.图像灰度方差说明了图像哪一个属性: a.平均灰度 b.图像对比度 c.图像整体亮度 d.图像细节 第 1 页 二、填空题(每空1分,共15分) l. 图像处理中常用的两种邻域是 4-邻域和 8-邻域。 2.图象平滑既可在空间域中进行,也可在频率域中进行。 3.常用的灰度内插法有最近邻元法、双线性内插法和三次内插法。 4. 低通滤波法是使高频成分受到抑制而让低频成分顺利通过,从而实现图像平滑。 5.Prewitt边缘检测算子对应的模板是和。 -1 -1 -1 -1 0 1 0 0 0 -1 0 1 1 1 1 -1 0 1 (不分先后) 6.图像压缩系统是有编码器和解码器两个截然不同的结构块组成的。 7.灰度直方图的纵坐标是该灰度出现的频率。 8.依据图象的保真度,图象编码可分为无失真(无损)编码和有失真(有损)编码两 种。
第一性原理计算原理和 方法精编 Document number:WTT-LKK-GBB-08921-EIGG-22986
第二章 计算方法及其基本原理介绍 化学反应的本质是旧键的断裂和新建的形成,参与成键原子的电子壳层重新组合是导致生成稳定多原子化学键的明显特征。因此阐述化学键的理论应当描写电子壳层的相互作用与重排,借助求解满足适当的Schrodinger 方程的波函数描写分子中电子分布的量子力学,为解决这一问题提供了一般的方法,然而,对于一些实际的体系,不引入一些近似,就不可能求解其Schrodinger 方程。这些近似使一般量子力学方程简化为现代电子计算机可以求解的方程。这些近似和关于分子波函数的方程形成计算量子化学的数学基础。 SCF-MO 方法的基本原理 分子轨道的自洽场计算方 法(SCF-MO)是各种计算方法的理论基础和核心部分,因此在介绍本文计算工作所用方法之 前,有必要对其关键的部分作 一简要阐述。 Schrodinger 方程及一些基本近似 为了后面介绍各种具体在自洽场分子轨道(SCF MO)方法方便,这里将主要阐明用于本文量子化学计算的一些重要的基本 R AB =R 图2-1分子体系的坐标
近似,给出SCF MO 方法的一些基本方程,并对这些方程作简略说明,因为在大量的文献和教材中对这些方程已有系统的推导和阐述[1-5]。 确定任何一个分子的可能稳定状态的电子结构和性质,在非相对论近似下,须求解定态Schrodinger 方程 ''12121212122ψψT p B A q p A p pA A pq AB B A p A A A E R Z r R Z Z M =??????? ?-++?-?-∑∑∑∑∑∑≠≠ () 其中分子波函数依赖于电子和原子核的坐标,Hamilton 算符包含了电子p 的动能和电子p 与q 的静电排斥算符, ∑∑≠+?-=p q p pq p e r H 12121?2 以及原子核的动能 ∑?-=A A A N M H 2121? 和电子与核的相互作用及核排斥能 ∑∑≠+-=p A B A AB B A pA A eN R Z Z r Z H ,21? 式中Z A 和M A 是原子核A 的电荷和质量,r pq =|r p -r q |,r pA =|r p -R A |和R AB =|R A -R B |分别是电子p 和q 、核A 和电子p 及核A 和B 间的距离(均以原子单位表示之)。上述分子坐标系如图所示。可以用V(R,r)代表-式中所有位能项之和 ∑∑∑-+=≠≠p A pA A B A q p pq AB B A r Z r R Z Z r R V ,12121),( 原子单位
机器视觉基本概念 2018.1.29 机器视觉系统 作用:利用机器代替人眼来做各种测量和判断。 它是计算机学科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。 机器视觉系统的特点:是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。可以在最快的生产线上对产品进行测量、引导、检测、和识别,并能保质保量的完成生产任务 视觉检测:指通过机器视觉产品(即图像摄取装置,分CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。是用于生产、装配或包装的有价值的机制。它在检测缺陷和防止缺陷产品被配送到消费者的功能方面具有不可估量的价值。 照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。 光源可分为可见光和不可见光。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。 照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。 镜头 FOV(Field of Vision)=所需分辨率*亚象素*相机尺寸/PRTM(零件测量公差比) 镜头选择应注意: ①焦距②目标高度③影像高度④放大倍数⑤影像至目标的距离⑥中心点/节点⑦畸变
第二章 计算方法及其基本原理介绍 化学反应的本质是旧键的断裂和新建的形成,参与成键原子的电子壳层重新组合是导致生成稳定多原子化学键的明显特征。因此阐述化学键的理论应当描写电子壳层的相互作用与重排,借助求解满足适当的Schrodinger 方程的波函数描写分子中电子分布的量子力学,为解决这一问题提供了一般的方法,然而,对于一些实际的体系,不引入一些近似, 确定任何一个分子的可能稳定状态的电子结构和性质,在非相对论近似下,须求解定态Schrodinger 方程 ''12121212122 ψψT p B A q p A p pA A pq AB B A p A A A E R Z r R Z Z M =??? ?????-++?-?-∑∑∑∑∑∑≠≠ (2.1) 其中分子波函数依赖于电子和原子核的坐标,Hamilton 算符包含了电子p 的动能和电子p
与q 的静电排斥算符, ∑∑≠+?-=p q p pq p e r H 12121?2 (2.2) 以及原子核的动能 ∑?-=A A A M H 2? (2.3) 和电子与核的相互作用及核排斥能 ∑∑≠+-=p A B A AB B A pA A eN R Z Z r Z H ,21? (2.4) 式中Z A 和M A 是原子核A 的电荷和质量,r pq =|r p -r q |,r pA =|r p -R A |和R AB =|R A -R B |分别是电子p 和q 、核A 和电子p 及核A 和B 间的距离(均以原子单位表示之)。上述分子坐标系如图2.1所示。可以用V(R,r)代表(2.2)-(2.4)式中所有位能项之和 ∑∑∑-+= ≠≠p A pA A B A q p pq AB B A r Z r R Z Z r R V ,1 2121),( (2.5) 原子单位 上述的Schrodinger 方程和Hamilton 算符是以原子单位表示的,这样表示的优点在于简化书写型式和避免不必要的常数重复计算。在原子单位的表示中,长度的原子单位是Bohr 半径 能量是以Hartree 为单位,它定义为相距1Bohr 的两个电子间的库仑排斥作用能 质量则以电子制单位表示之,即定义m e =1 。
智能控制之蚁群算法 1引言 进入21世纪以来,随着信息技术的发展,许多新方法和技术进入工程化、产品化阶段,这对自动控制技术提出新的挑战,促进了智能理论在控制技术中的应用,以解决用传统的方法难以解决的复杂系统的控制问题。随着计算机技术的飞速发展,智能计算方法的应用领域也越来越广泛。 智能控制技术的主要方法有模糊控制、基于知识的专家控制、神经网络控制和集成智能控制等,以及常用优化算法有:遗传算法、蚁群算法、免疫算法等。 蚁群算法是近些年来迅速发展起来的,并得到广泛应用的一种新型模拟进化优化算法。研究表明该算法具有并行性,鲁棒性等优良性质。它广泛应用于求解组合优化问题,所以本文着重介绍了这种智能计算方法,即蚁群算法,阐述了其工作原理和特点,同时对蚁群算法的前景进行了展望。 2 蚁群算法概述 1、起源 蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型技术。它由Marco Dorigo于1992年在他的博士论文中引入,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。 Deneubourg及其同事(Deneubourg et al.,1990; Goss et al.,1989)在可监控实验条件下研究了蚂蚁的觅食行为,实验结果显示这些蚂蚁可以通过使用一种称为信息素的化学物质来标记走过的路径,从而找出从蚁穴到食物源之间的最短路径。 在蚂蚁寻找食物的实验中发现,信息素的蒸发速度相对于蚁群收敛到最短路径所需的时间来说过于缓慢,因此在模型构建时,可以忽略信息素的蒸发。然而当考虑的对象是人工蚂蚁时,情况就不同了。实验结果显示,对于双桥模型和扩展双桥模型这些简单的连接图来说,同样不需要考虑信息素的蒸发。相反,在更复杂的连接图上,对于最小成本路径问题来说,信息素的蒸发可以提高算法找到好解的性能。 2、基于蚁群算法的机制原理 模拟蚂蚁群体觅食行为的蚁群算法是作为一种新的计算智能模式引入的,该算法基于如下假设: (1)蚂蚁之间通过信息素和环境进行通信。每只蚂蚁仅根据其周围的环境作出反应,也只对其周围的局部环境产生影响。 (2)蚂蚁对环境的反应由其内部模式决定。因为蚂蚁是基因生物,蚂蚁的行为实际上是其基因的自适应表现,即蚂蚁是反应型适应性主体。 (3)在个体水平上,每只蚂蚁仅根据环境作出独立选择;在群体水平上,单
蚁群算法原理及在TSP 中的应用 1 蚁群算法(ACA )原理 1.1 基本蚁群算法的数学模型 以求解平面上一个n 阶旅行商问题(Traveling Salesman Problem ,TSP)为例来说明蚁群算法ACA (Ant Colony Algorithm )的基本原理。对于其他问题,可以对此模型稍作修改便可应用。TSP 问题就是给定一组城市,求一条遍历所有城市的最短回路问题。 设()i b t 表示t 时刻位于元素i 的蚂蚁数目,()ij t τ为t 时刻路径(,)i j 上的信息量,n 表示TSP 规模,m 为蚁群的总数目,则1()n i i m b t ==∑;{(),}ij i i t c c C τΓ=?是t 时刻集合C 中元素(城市)两两连接ij t 上残留信息量的集合。在初始时刻各条路径上信息量相等,并设 (0)ij const τ=,基本蚁群算法的寻优是通过有向图 (,,)g C L =Γ实现的。 蚂蚁(1,2,...,)k k m =在运动过程中,根据各条路径上的信息量决定其转移方向。这里用禁忌表(1,2,...,)k tabu k m =来记录蚂蚁k 当前所走过的城市,集合随着 k tabu 进化过程作动态调整。在搜索过程中,蚂蚁根据各条路径上的信息量及路 径的启发信息来计算状态转移概率。()k ij p t 表示在t 时刻蚂蚁k 由元素(城市)i 转移 到元素(城市)j 的状态转移概率。 ()*()()*()()0k ij ij k k ij ij ij s allowed t t j allowed t t p t αβ αβτητη??????????? ∈?????=????? ??? ∑若否则 (1) 式中,{}k k allowed C tabuk =-表示蚂蚁k 下一步允许选择的城市;α为信息启发式因子,表示轨迹的相对重要性,反映了蚂蚁在运动过程中所积累的信息在蚂蚁运动时所起作用,其值越大,则该蚂蚁越倾向于选择其他蚂蚁经过的路径,蚂蚁之间协作性越强;β为期望启发式因子,表示能见度的相对重要性,反映了蚂蚁在运动过程中启发信息在蚂蚁选择路径中的重视程度,其值越大,则该状态转移概率越接近于贪心规则;()ij t η为启发函数,其表达式如下: 1 ()ij ij t d η= (2)
第一性原理计算的理论方法 随着科技的发展,计算机性能也得到了飞速的提高,人们对物理理论的认识也更加的深入,利用计算机模拟对材料进行设计已经成为现代科学研究不可缺少的研究手段。这主要是因为在许多情况下计算机模拟比实验更快、更省,还得意于计算机模拟可以预测一些当前实验水平难以达到的情况。然而在众多的模拟方法中,第一性原理计算凭借其独特的精度和无需经验参数而得到众多研究人员的青睐,成为计算材料学的重要基础和核心计算。本章将介绍第一性原理计算的理论基础,研究方法和ABINIT软件包。 1.1 第一性原理 第一性原理计算( 简称从头计算,the abinitio calculation) ,指 从所要研究的材料的原子组分出发,运用量子力学及其它物理规律,通过自洽计算来确定指定材料的几何结构、电子结构、热力学性质和光学性质等材料物性的方法。基本思想是将多原子构成的实际体系理解成为只有电子和原子核组成的多粒子系统,运用量子力学等最基本的物理原理最大限度的对问题进行”非经验”处理。【1】第一性原理计算就只需要用到五个最基本的物理常量即( m o.e.h.c.k b ) 和元素周期表中各组分元素的电子结构,就可以合理地预测材料的许多物理性质。用第一性原理计算的晶胞大小和实验值相比误差只有几个百分点,其他性质也和实验结果比较吻合,体现了该理论的正确性。
第一性原理计算按照如下三个基本假设把问题简化: 1.利用Born-Oppenheimer 绝热近似把包含原子核和电子的多粒子问题转化为多电子问题。 2.利用密度泛函理论的单电子近似把多电子薛定谔方程简化为比较容易求解的单电子方程。 3.利用自洽迭代法求解单电子方程得到系统基态和其他性质。以下我将简单介绍这些第一性原理计算的理论基础和实现方法:绝热近似、密度泛函理论、局域密度近似(LDA)和广义梯度近似(GGA)、平面波及赝势方法、密度泛函的微扰理论、热力学计算方法和第一性原理计算程序包ABINIT。 1.2量子力学与Born-Oppenheimer 近似固体是由原子核和核外的电子组成的,在原子核与电子之间,电子与电子之间,原子核与原子核之间都存在着相互作用。从物理学的角度来看,固体是一个多体的量子力学体系【2】,相应的体系哈密顿量可以写成如下形式: H (r,R) E H(r ,R) (1-1) 其中r,R 分别代表所有电子坐标的集合、所有原子核坐标的集合。在不计外场作用下,体系的哈密顿量日包括体系所有粒子( 原子核和电子) 的动能和粒子之间的相互作用能,即 H H e H N H e N (1-2) 其中,以是电子部分的哈密顿量,形式为: 22 1 e2 H e(r) r2i 1 e(1-3)
题目:请比较PageRank算法和HITS算法的优缺点,除此之外,请再介绍2种用于搜索引擎检索结果的排序算法,并举例说明。 答: 1998年,Sergey Brin和Lawrence Page[1]提出了PageRank算法。该算法基于“从许多优质的网页链接过来的网页,必定还是优质网页”的回归关系,来判定网页的重要性。该算法认为从网页A导向网页B的链接可以看作是页面A对页面B的支持投票,根据这个投票数来判断页面的重要性。当然,不仅仅只看投票数,还要对投票的页面进行重要性分析,越是重要的页面所投票的评价也就越高。根据这样的分析,得到了高评价的重要页面会被给予较高的PageRank值,在检索结果内的名次也会提高。PageRank是基于对“使用复杂的算法而得到的链接构造”的分析,从而得出的各网页本身的特性。 HITS 算法是由康奈尔大学( Cornell University ) 的JonKleinberg 博士于1998 年首先提出。Kleinberg认为既然搜索是开始于用户的检索提问,那么每个页面的重要性也就依赖于用户的检索提问。他将用户检索提问分为如下三种:特指主题检索提问(specific queries,也称窄主题检索提问)、泛指主题检索提问(Broad-topic queries,也称宽主题检索提问)和相似网页检索提问(Similar-page queries)。HITS 算法专注于改善泛指主题检索的结果。 Kleinberg将网页(或网站)分为两类,即hubs和authorities,而且每个页面也有两个级别,即hubs(中心级别)和authorities(权威级别)。Authorities 是具有较高价值的网页,依赖于指向它的页面;hubs为指向较多authorities的网页,依赖于它指向的页面。HITS算法的目标就是通过迭代计算得到针对某个检索提问的排名最高的authority的网页。 通常HITS算法是作用在一定范围的,例如一个以程序开发为主题的网页,指向另一个以程序开发为主题的网页,则另一个网页的重要性就可能比较高,但是指向另一个购物类的网页则不一定。在限定范围之后根据网页的出度和入度建立一个矩阵,通过矩阵的迭代运算和定义收敛的阈值不断对两个向量authority 和hub值进行更新直至收敛。 从上面的分析可见,PageRank算法和HITS算法都是基于链接分析的搜索引擎排序算法,并且在算法中两者都利用了特征向量作为理论基础和收敛性依据。