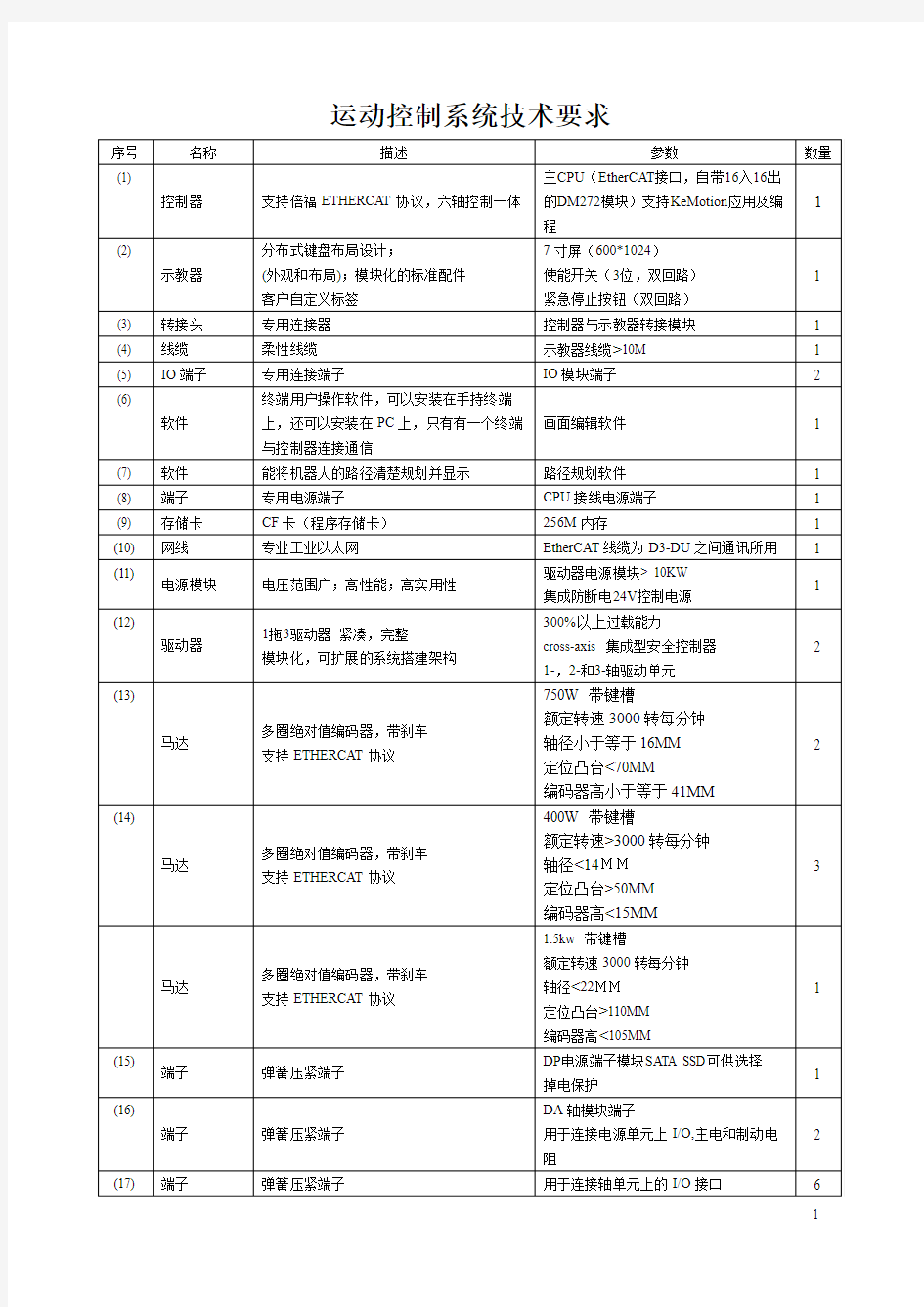
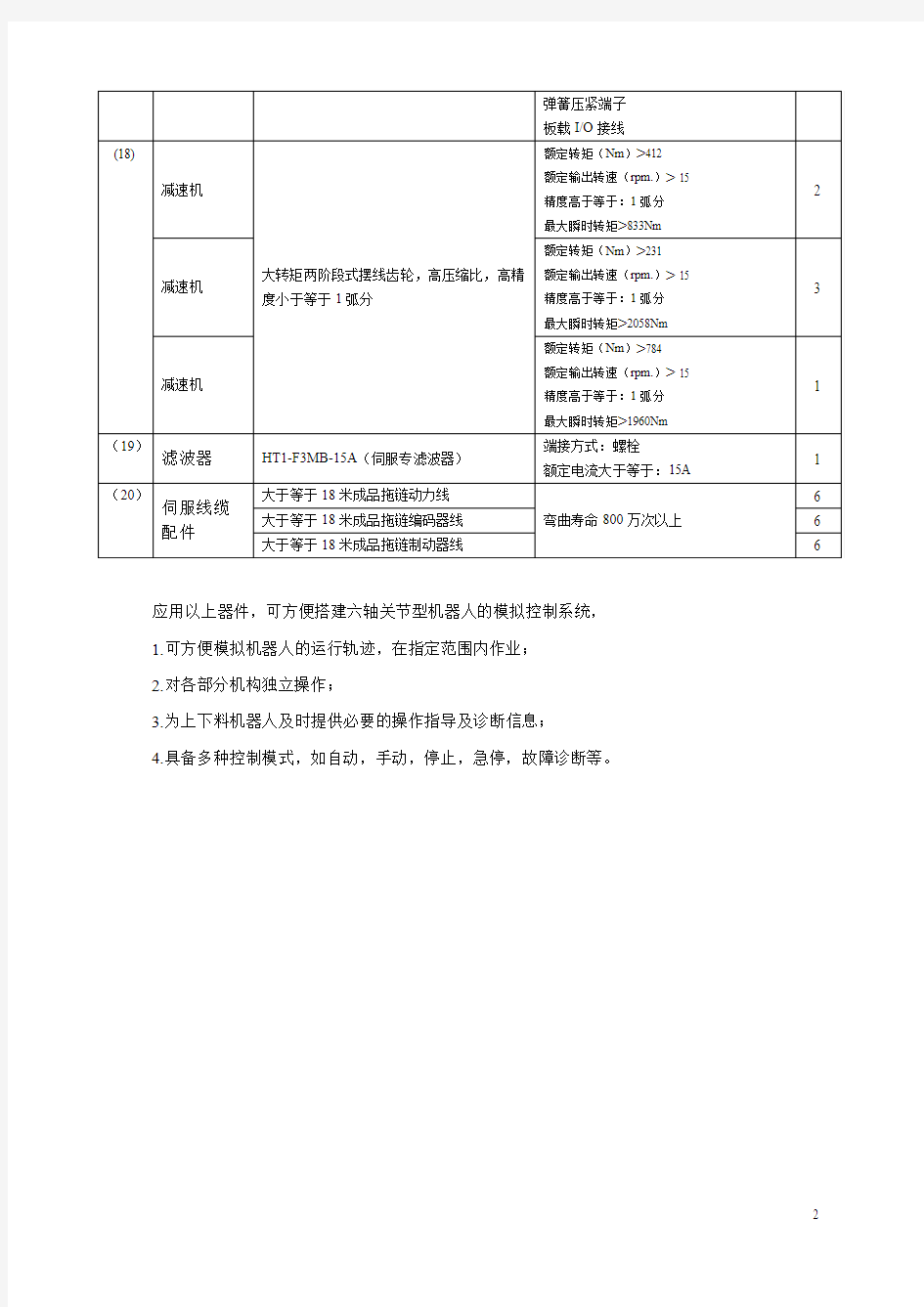
运动控制系统技术要求
应用以上器件,可方便搭建六轴关节型机器人的模拟控制系统,
1.可方便模拟机器人的运行轨迹,在指定范围内作业;
2.对各部分机构独立操作;
3.为上下料机器人及时提供必要的操作指导及诊断信息;
4.具备多种控制模式,如自动,手动,停止,急停,故障诊断等。
《运动控制系统》课程设计报告 时间 2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博 __ 学号 41151093 指导教师潘月斗 ___ 成绩 _______
摘 要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
卷烟厂后勤保障设施及倒班宿舍设备采购项目及安装工程招标 技术要求及标准 一、招标围 工程地点:卷烟厂 招标容: 标段一:后勤保障设施厨房、就餐区设备采购及安装、厨房二次深化设计(土建装修、通风、所有厨具的给水、排水、用电、用气、排风、抽油烟装置、排水池及满足厨具运行的相关设备的位置、标高、口径、接驳点、负荷、插座等) 标段二:后勤保障设施及倒班宿舍多功能厅设备、倒班宿舍设施采购及安装 二、资质要求 1、在中华人民国工商管理部门注册的,能够独立承担民事责任的独立法人。 2、投标人可以为设备制造厂商或代理经销商。投标人是从事设备、设施安装、设计的专业公司,具有很强的技术队伍,在行业具有良 好的信誉和业绩 3、投标设备制造的相关资质证明原件,包含但不仅限于:全国工业产品生产许可证(燃气灶具)、产品质量检验报告等;投标人或代 理品牌燃气燃烧器具、设备设施安装维修企业资质证书原件。 4、投标人在本市具备相应的安装、售后、维修保养机构(提供有关证明资料原件)。 5、具有良好的商业信誉和健全的财务管理制度。 6、本次招标不接受联合体招标。
三、厨房及就餐区设备质量要求、技术要求及数量 主厨区 序号名称规格型号数量单位备注 01 双通工作台1800*8002台 1、设计制作标准参照《不锈钢厨房设备操作台》(QB/T 2319.3-2004); 2、工作台的面板选用304#厚度为1.5mm不锈钢腹膜磨砂板,工作台面板下垫厚度18mm细木工板; 3、工作台的侧板、层板、门板及其他辅助板选用304#厚度为1.2mm不锈钢腹膜磨砂板; 4、工作台底板选用304#厚度为1.2mm不锈钢腹膜磨砂板; 5、工作台台面和底板都需要加固,加固槽头选用厚度1.2mm不锈钢腹膜磨砂板; 6、工作台的支撑脚管选用D51*1.0mm不锈钢管; 7、工作台的支撑脚底部装配有D51mm不锈钢可调脚,调教围为上下40mm。 02 三门海鲜蒸柜1200*100 1 台 1、设计制作标准参照《不锈钢厨房设备操作台》(QB/T 2319.3-2004); 2、板材:面1.2mm不锈钢板,柜体用1.2mm 不锈钢板,骨架40*40角铁; 3、台下衬板2.8mmA3钢板。优质耐高温棉、耐火材料,高级耐火棉隔热以及耐火砖砌结火位。通脚采用Φ50×1.5无缝; 4、SUS304高档不锈钢炉胆、外壳,坚固耐用,维护简单; 5、三门海鲜蒸柜蒸腔通道独立,食物不串味; 6、食品机械卫生要求完全达标。 03 六眼煲仔炉1000*1100 1 台 1、设计制作标准参照《不锈钢厨房设备操作台》(QB/T 2319.3-2004); 2、炉面选用304#厚度1.5mm不锈钢腹膜磨砂板; 3、侧板、围板选用1.0mm不锈钢板; 4、附件:4个可调节子弹脚。
11级电气工程与自动化专业《运动控制系统》基本要求(2014-05-23) 第一章 绪论 了解本课程的研究内容。 第二章 (转速单)闭环控制的直流调速系统 1、 了解V (SCR )--M 、PWM--M 两种主电路方案及其特点(2.1节、P16、P97--98、笔记); 2、 他励(或永磁)直流电动机三种数学模型及转换,解耦模型中I do ~U d 环节的处理(P27--28、笔记); 3、 稳态性能指标中D 、S 间关系及适用范围(2.2.1节、P29--30、笔记); 4、 转速单闭环直流调速系统组成原理、特点及适用范围(P2 5、笔记); 5、 带电流截至负反馈的转速单闭环直流调速系统的组成原理、特点(笔记、2.5.2节)。 第三章 转速、电流反馈控制的直流调速系统 1、 双闭环直流调速系统的组成原理(主要指:V —M 不可逆调速系统、PWM-M 调速系统)、特点,符合实际的系统数学模型,静(稳)态参数的整定及计算(P60、P59--6 2、笔记); 2、 ASR 、ACR 的作用(P65); 3、 典1、典2系统的特点、适用范围、参数整定依据(3.3.2节、笔记); 4、 基于工程设计法的ASR 、ACR 调节器参数整定方法(P77--78、3.3.3节、例3-1、3-2、笔记); 5、 理解ASR 退饱和时的(阶跃响应)转速超调量等时域指标算式(P86--88、笔记); 6、 系统分别在正常恒流动态、稳态阶段,及机械堵转故障、转速反馈断开故障下的(新稳态)物理量计算; 7、 M 、T 、M/T 三种数字测速方法及特点(2.4.2节、笔记); 8、 了解了解M/T 数字测速的技术实现方法、系统控制器的技术实现方法(P82-85、笔记)。 第四章 可逆控制和弱磁控制的直流调速系统 1、 PWM--M 可逆直流调速系统组成原理及特点(4.1节,笔记) 2、 V (SCR )--M 可逆主电路中的环流概念、类型、特点(P103--104、笔记); 3、 常用的晶闸管-直流电动机可逆调速系统组成原理及特点(4.2.2节,图4-1 4、图4-1 5、4.2.3节)。 第五章 基于稳态模型的异步电动机调速系统 1、 异步电动机定子调压调速的机械特性簇与特点,转速闭环调压调速系统组成原理及适用范围(5.1--5.2节); 2、 软起动器的作用及适用条件(5.2.4节); 3、 异步电动机变压变频调速的基本协调控制关系(一点两段)及其依据(5.3.1节); 4、 异步电动机四种协调控制的特点,各自的机械特性簇、特点及比较(5.3.2节--5.3.3节、笔记); 5、 SPWM 、CFPWM 、SVPWM 变频调速器组成原理与特点,及其中各环节的作用(5.4节); 6、 了解基于转差频率控制的转速闭环变频变压调速系统的基本原理(5.6节)。 第六章 基于动态模型的异步电动机调速系统 1、 交流电动机坐标变换的作用,矢量控制(VC )的基本思想、特点(6.6、6.7、笔记); 2、 异步电动机VC 系统的一般组成原理(图6-20); 3、 了解各种具体的VC 系统组成方案,理解转子磁链直接与间接定向控制的区别(6.6. 4、6.6.6节、笔记); 4、 异步电动机直接转矩控制(DTC )系统的基本原理及特点(6.7.3节),DTC 与VC 的比较(6.8节)。 第七章 绕线转子异步电动机双馈调速系统 1、 绕线转子异步电动机次同步串级调速主电路及其工作原理,()S f β=公式及特点(7.2.1节、笔记); 2、 绕线转子异步电动机双闭环次同步串级调速系统组成原理;起动、停车操作步骤;(7.5、7.6、7.4.3节、笔记)。 第八章 同步电动机变压变频调速系统 1、 正弦波永磁同步电动机(PMSM )矢量控制系统组成原理,0sd i =时的转矩公式(8.4.3节); 2、 具有位置、速度闭环的正弦波永磁同步电动机(伺服)矢量控制系统组成原理(图8-26、27扩展、笔记)。 第九章 伺服系统 1、 位置伺服系统的典型结构(开环、半闭环、闭环、混合闭环)及特点(笔记、9.1.2); 2、 位置伺服系统的三种运行方式、位置伺服系统的三种方案;(笔记、9.3.2--9.3.4) 3、 数字伺服系统中电子齿轮的作用(笔记); 4、 数字式位置、速度伺服系统的指令形式(笔记)。 *** 考试须知---要点提示: (1)无证件者不能考试;(2)未交卷者中途不得离场;(3)严禁带手机到座位,操作手机者按作弊论处。 附:答疑地点(2-216)、时间:(1)2014-6-6,13:00--15:00;(2)2014-6-7,8:00--11:00,13:00--15:00。
运动控制系统实验报告 专业班级 学号 姓名 学院名称 运动控制仿真实验报告 一、实验内容与要求 1.单闭环转速负反馈 2.转速电流双闭环负反馈
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建 具体要求:针对1 2 (1)仿真各环节参数 (2)仿真模型的建立 (3)仿真结果,分为空载还是负载,有无扰动 (4)仿真结果分析 二、Simulink 环境下的仿真 1.单闭环转速负反馈 1.1转速负反馈闭环调速系统仿真各环节参数 直流电动机:额定电压N U =220V ,额定电流dN I =55A ,额定N n =1000r/min ,电动机电动 势系数e C =0.192V ·min/r 。 假定晶闸管整流装置输出电流可逆,装置的放大系数s K =44,滞后时间常数 s T =0.00167s 。 电枢回路总电阻R=1.0Ω,电枢回路电磁时间常l T =0.00167s ,电力拖动统机电时间 常数m T =0.075s 。 转速反馈系数α=0.01V ·min/r 。 对应额定转速是的给定电压 n U =10V 。
1.2仿真模型的建立 图1-1单闭环转速负反馈直流调速系统的仿真模型 PI 调节器的值定为 =0.56, = 11.43。 图1-2单闭环转速负反馈直流调速系统加入扰动负载时的仿真模型 1.3仿真结果 p K 1
图1-3空载启动不加扰动转速和电流波形 图1-4空载启动加负载扰动转速和电流波形 1.4仿真结果分析 (1)空载启动无扰动:由空载启动不加扰动转速和电流波形可知,当 =0.56, = 11.43。系统转速有较大的超调量,但快速性较好的。空载启动电流的最大值有230A 左右,而额定电流 dN I =55A ,远远超过了电动机承受的最大电流。 (1)空载启动加负载扰动:由空载启动加负载扰动转速和电流波形可知,在空载启动1S 后加负载扰动,在1S 到1.5S 时间段,转速和电流有明显的下降,但系统马上进行了调节。 p K 1
厨具设备制作工艺、材料及技术要求 一、电器设备: 1、所提供的电器设备均符合中国电工标准。设备单相220V三线制50HZ,三相380V五线制50HZ。所有用电设备均需配备漏电保护。 2、所提供的电机均采用防爆、防潮、全封闭型。 根据韶关市供电质量状况,凡1KV A及以上的电机均需配备过载保护。 3、所有软线和插头均应定额在设备满负荷的200%或以上,并符合配线规定和中国电工标准。 4、所提供的冷柜、热柜、热汤池、电烤炉、发酵柜均采用恒温自动控制器。 二、制冷设备 1、所提供的保鲜冷柜均采用进口压缩机组机,不锈钢内外壳,浇铸式聚氨脂发泡保温材料,灵活可靠的门锁。 2、所提供的冷库均是合格制造商生产,铝压花冷房板拼装,进口压缩机组。 三、阀门、水龙头及配件器材 1、所有洗涤星池均应配有国产名牌的摇摆水龙头。 2、油阀门采用压铸式铜密封截止阀。 3、水阀门采用压铸式截止阀或球阀。 4、燃气阀门采用进口球阀。 四、手柄、托架、锁及小五金件 1、所有厨房设备配备的手柄,拉手、挂勾、托架或其它五金类
器件,均应是不锈钢制品,或是黄铜制品及压铸铝合金制品,表面抛光处理及镀铬磨光。 2、所有厨房设备的门、抽屉、冰箱等使用的锁均有镀铬磨光,牢固结实。 五、螺栓、螺罗、紧固件 所有设备的裸露表面应尽可能无螺栓、螺母或铆钉、紧固件应该是隐蔽的,在设备内部无论何处看到的或布接到角的紧固件,均应用镀铬黄铜或不锈钢制成,不得用钢铁制品。 六、柱腿、横撑和台脚 1、柱腿应用ф38X1.5不锈钢管制成,横撑应用ф25X1.2不锈钢制成,台脚应用可调试子弹脚,台脚调节高度不小于25mm。 2、所有横撑均应为水平焊接,离地高度为150mm。 七、台下层板 1、所有厨房工作台,柜的层板应为1.2mm不锈钢板。 2、层板应有足够的加强筋和牢固的支承。 3、所有层板为水平焊接,底层板离地高度为150mm。 八、抽屉 1、所有抽屉应由1.0mm不锈钢制成(除非另有规定外),其外形尺寸应为500X500X130。 2、抽屉应采用大尺寸滚珠轴承支撑,抽屉拉出长度应不小于其自身长度的2/3。并要使支撑重负荷时不发生偏斜。 3、所有抽屉均应有可置换的轻氯丁橡胶减震垫。 九、星盆、滴水板
精心整理 二、填空题 1.PWM控制技术包括单极性控制和双极性控制两种方式。 2.反馈控制系统的作用是:抵抗扰动,服从给定。 3.静态环流可以分为直流平均环流和瞬时脉动环流。 4.PWM逆变器根据电源类型不同可以分为电压型和电流型。 5.直流电动机电枢的电流由负载决定。 20.V-M系统中,采用三相整流电路,为抑制电流脉动,可采用的主要措施是设置平波电抗器. 21.在单闭环调速系统中,为了限制全压启动和堵转电流过大,通常采用电流截止负反馈。22.在无静差的直流调速系统中,I部分的作用是__消除稳态误差____。 23.在α=β配合控制的直流可逆调速系统中,存在的是瞬时脉动环流,可用串接环流电抗器抑制。24.调速系统的稳态性能指标有调速范围、静差率。 25.某直流调速系统电动机的额定转速为n =1430r/min,额定速降为115r/min,要求静差率s≤30%, N 则系统允许的最大调速范围为。
26.转速、电流双闭环调速系统当中,两个调节器采用串联联接,其中转速反馈极性为负、电流反馈极性为负。 27.转速、电流双闭环系统,采用PI调节器,稳态运行时,转速n取决于给定电压、ASR的输出量取决于负载电流。 28.下图为单闭环转速控制系统。 (1)图中V是晶闸管整流器; 是平波电抗器,它的作用是抑制电流脉动和保证最小续流电流; (2)图中L d 37.在两组晶闸管反并联的可逆调速系统中,反转用正组晶闸管实现回馈制动的。 38、交流异步电动机调压调速工作时,其最大转矩随电机电压的降低而降低。 39、恒压频比控制方式是指给异步电动机供电的电压和之频率比为常数。 40、异步电动机变压变频调速控制特性曲线中,基频以下调速称为恒转矩调速,基频以上调速称为恒功率调速。 42、转速、电流双闭环直流调速系统中,对负载变化起抗扰作用的是转速调节器。 43、对于调速系统,最主要的抗扰性能是抗负载扰动和抗电网电压的性能。 44、在调速系统中常用的抗扰性能指标为动态降落和恢复时间。
单轴电机运动控制实验报告范文 实验一晶闸管直流调速系统电流-转速调节器调试 一.实验目的 1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。2.掌握直流调速系统主要单元部件的调试步骤和方法。 二.实验内容 1.调节器的调试 三.实验设备及仪器 1.教学实验台主控制屏。2.MEL―11组件3.MCL―18组件4.双踪示波器5.万用表 四.实验方法 1.速度调节器(ASR)的调试 按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。 (1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI 调节器,加入一定的输入电压(由MCL―18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于5V。 (2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画 图1-5 速度调节器和电流调节器的调试接线图
出曲线。 (3)观察PI特性 拆除“5”、“6”端短接线,突加给定电压(0.1V),用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 2.电流调节器(ACR)的调试按图1-5接线。 (1)调整输出正,负限幅值 “9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值等于5V。 (2)测定输入输出特性 将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察PI特性 拆除“9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 一.实验目的 1.了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。3.熟悉MCL-18,MCL-33的结构及调试方法
《运动控制系统》课程设计报告 时间2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博__ 学号 指导教师潘月斗 ___ 成绩 _______
摘要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
自动控制系统实验报告 学号: 班级: 姓名: 老师:
一.运动控制系统实验 实验一.硬件电路的熟悉和控制原理复习巩固 实验目的:综合了解运动控制实验仪器机械结构、各部分硬件电路以及控制原理,复习巩固以前课堂知识,为下阶段实习打好基础。 实验内容:了解运动控制实验仪的几个基本电路: 单片机控制电路(键盘显示电路最小应用系统、步进电机控制电路、光槽位置检测电路) ISA运动接口卡原理(搞清楚译码电路原理和ISA总线原理) 步进电机驱动检测电路原理(高低压恒流斩波驱动电路原理、光槽位置检测电路)两轴运动十字工作台结构 步进电机驱动技术(掌握步进电机三相六拍、三相三拍驱动方法。) 微机接口技术、单片机原理及接口技术,数控轮廓插补原理,计算机高级语言硬件编程等知识。 实验结果: 步进电机驱动技术: 控制信号接口: (1)PUL:单脉冲控制方式时为脉冲控制信号,每当脉冲由低变高是电机走一步;双 脉冲控制方式时为正转脉冲信号。 (2)DIR:单脉冲控制方式时为方向控制信号,用于改变电机转向;双脉冲控制方式 时为反转脉冲信号。
(3)OPTO :为PUL 、DIR 、ENA 的共阳极端口。 (4)ENA :使能/禁止信号,高电平使能,低电平时驱动器不能工作,电机处于自由状 态。 电流设定: (1)工作电流设定: (2)静止电流设定: 静态电流可用SW4 拨码开关设定,off 表示静态电流设为动态电流的一半,on 表示静态电流与动态电流相同。一般用途中应将SW4 设成off ,使得电机和驱动器的发热减少,可靠性提高。脉冲串停止后约0.4 秒左右电流自动减至一半左右(实际值的60%),发热量理论上减至36%。 (3)细分设定: (4)步进电机的转速与脉冲频率的关系 电机转速v = 脉冲频率P * 电机固有步进角e / (360 * 细分数m) 逐点比较法的直线插补和圆弧插补: 一.直线插补原理: 如图所示的平面斜线AB ,以斜线起点A 的坐标为x0,y0,斜线AB 的终点坐标为(xe ,ye),则此直线方程为: 00 00Y Ye X Xe Y Y X X --= -- 取判别函数F =(Y —Y0)(Xe —Xo)—(X-X0)(Ye —Y0)
《运动控制系统》课程教学大纲 大纲执笔人:大纲审核人: 课程编号:0808000555 英文名称:Motion control system 学分:4 总学时:64。其中,讲授54 学时,实验 10 学时,上机 0 学时,实训 0 学时。 适用专业: 自动化 先修课程:自动控制原理、现代控制理论基础、电力电子技术 一、课程性质与教学目的 《运动控制系统》是一门讲授交、直流电动机控制理论和控制规律,以提高电能利用效率及运动控制品质的一门专业主干课程,是自动化专业的一门必修课。其目的是使学生了解并掌握各类交、直流电动机控制系统的基本结构、工作原理和性能指标,着重培养学生对运动控制系统的综合分析能力和工程设计能力,从而掌握现代交、直流电动机的控制理论和系统设计方法,为今后从事专业工作打下扎实的基础。 二、基本要求 本课程秉承理论与实际相结合的理念,应用自动控制理论解决运动控制系统的分析和设计问题,以转矩和磁链(或磁通)控制规律为主线,由简入繁、由低及高地循序深入,论述系统的静、动态性能。通过本课程的学习,要求学生能够了解运动控制系统的定义、结构及其分类,理解运动控制的必要性,掌握单、双闭环直流电动机调速系统、VVVF变频器、交流异步电动机矢量控制系统、正弦波永磁同步电动机调速系统、位置控制系统等的结构与原理、分析与设计方法。 三、重点与难点 1. 课程重点 (1)直流调速系统:以直流电动机为对象组成的运动控制系统,转速单闭环调速系统,转速、电流双闭环控制调速系统的基本组成和控制规律,静态、动态性能分析,直流调速系统的工程设计方法,直流调速系统的数字控制方法。 (2)交流调速系统:异步电动机的稳态模型及基于稳态模型的交流调速系统,异步电动机的动态模型及基于动态模型的高性能交流调速系统,同步电动机变频调速系统。 2、课程难点 (1)双闭环直流调速系统:通过双闭环直流调速系统静、动态模型研究及性能分析,对转速与电流环的典型系统校正,推导PI 控制规律与工程计算方法。 (2)空间电压矢量PWM:从稳态和动态、时域和空间等方面论述矢量、标量、相量的区别与联系,各自的表现形式,基本特征与物理意义。 (3)异步电动机动态数学模型:依据旋转磁场产生原理,论述时间和空间变量的相对关系,讨论静止与旋转(或交变)的关系与转化,理解在各种坐标系下的数学模型。通过计算机数字仿真,分析比较各种物理量在不同坐标系的表现形式和相互间的联系。 (4)矢量控制系统:着重论述按转子磁链定向,定子电流转矩分量和励磁分量的解耦,等效
运动控制系统实验报 告 姓名刘炜原 学号 201303080414
实验一 晶闸管直流调速系统电流 -转速调节器调试 一. 实验目的 1 ?熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。 2?掌握直流调速系统主要单元部件的调试步骤和方法。 三. 实验设备及仪器 1?教学实验台主控制屏。 2. ME —11 组件 3. MC —18 组件 4. 双踪示波器 5. 万用表 四. 实验方法 1. 速度调节器(ASR 的调试 按图1-5接线,DZS (零速封锁 器)的扭子 开关扳向“解除”。 (1) 调整输出正、负限幅值 “ 5”、“ 6”端 接可调电容, 使ASR 调节器为PI 调节器,加入 一定的输入电压(由MC —18的给 定提供,以下同),调整正、负限 幅电位器RR 、 RP ,使输出正负值 等于:5V 。 (2) 测定输入输出特性 将反馈网络中的电容短接 (“ 5”、“6 ”端短接),使 ASR 调节器为P 调节器,向调节器输入 端逐渐加入正负电压,测出相应的 输出电压,直至输出限幅值,并画 出曲线。 (3) 观察PI 特性 拆除“ 5”、“6”端短接线,突加 二.实验内容 1?调节器的调试 C B RF 4 2 HP1 RP2 6 4 2 3 1 NMCL-31A 可调电容,位于 NMCL-18的下部 封锁 -S 2 反 号 Q 9 ASR ( ??) DZS (零速封锁 解除 ACR 电就声书器) 11 12 图1-5速度调节器和电流调节器的调试接线图
给定电压(_0.1V),用慢扫描示波器观察输出电压的 变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容 箱改变数值。 2.电流调节器(ACR的调试 按图1-5接线。 (1)调整输出正,负限幅值 “9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值等于_5V。 (2)测定输入输出特性 将反馈网络中的电容短接(“ 9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察PI特性 拆除“ 9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变 数值。
一.家用厨房设备术语 GB/—200x 家用厨房设备术语 1、范围 本部分规定了家用厨房设备按特征、结构、功能等分类命名的专用术语。 2、家用厨房设备所使用的主要术语的分类 家用厨房设备 house hold kitchen为了烹饪作业的需要所组成的操作平台、水槽、橱柜、相关电器及功能五金件的组合。 按所处的空间位置命名的术语: 吊柜 wall cupboard安装在墙面上高度在低柜台面以上的橱柜。 低柜 low cupboard放置在地面上起操作台作用的橱柜。 高柜 high cupboard放置在地面上,高度高于低柜且不起操作台作用的橱柜。 按功能命名的术语 灶具柜 cupboard for stove放置灶具(嵌入或台式)的橱柜。 水槽柜 cupboard for flume放置水槽(包含排水机构)的橱柜。 操作台柜 cupboard for work用于切、配、调理等功能的低柜。 调料柜 cupboard for cooking materials放置调料品的橱柜。 米柜 cupboard for rice安装米箱储米的橱柜。
抽屉柜 cupboard for drawers安装一层或多层抽屉的橱柜。 拉篮柜 cupboard for baskets安装各种拉篮的橱柜。 吸油烟机柜 cupboard for range hood吸油烟机上方的吊柜。 转角柜 corner cupboard安装在转角部位的橱柜。 钢瓶柜 cupboard for steel bottle放置液化气钢瓶的橱柜。 储藏柜 cupboard for storage起储藏功能用的吊柜、低柜和高柜的统称。 家用厨房设备五金件 hardware for kitchen facility in house形成橱柜构造和功能的部分。 五金配件 hardware fittings组成厨柜结构和构造必备的部件(包含铰链.拉手.连接件.滑轨.吊码.搁板销.调整脚等)。 五金辅件 hardware accessory主要组成或增加橱柜功能的可选部件(包含各种拉篮.垃圾桶.米箱.挂件.调味架.转角盘.刀架等)。 家用厨房电器 home electric's appliance in kitchen在厨房中参与烹饪、清洁和储藏等的各种家用电器(包含吸油烟机、灶具、洗碗机、消毒碗柜、冰箱、微波炉、烤箱和电饭煲等)。 按结构和构造命名的部件术语(见图1)
运动控制系统 实验指导书 赵黎明、王雁编 广东海洋大学信息学院自动化系
直流调速 实验一不可逆单闭环直流调速系统静特性的研究 一.实验目的 1.研究晶闸管直流电动机调速系统在反馈控制下的工作。 2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。 3.学习反馈控制系统的调试技术。 二.预习要求 1.了解速度调节器在比例工作与比例—积分工作时的输入—输出特性。 2.弄清不可逆单闭环直流调速系统的工作原理。 三.实验线路及原理 见图6-7。 四.实验设备及仪表 1.MCL系列教学实验台主控制屏。 2.MCL—18组件(适合MCL—Ⅱ)或MCL—31组件(适合MCL—Ⅲ)。 3.MCL—33(A)组件或MCL—53组件。 4.MEL-11挂箱 5.MEL—03三相可调电阻(或自配滑线变阻器)。 6.电机导轨及测速发电机、直流发电机M01(或电机导轨及测功机、MEL—13组件)。 7.直流电动机M03。 8.双踪示波器。 五.注意事项 1.直流电动机工作前,必须先加上直流激磁。 2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。 3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。 4.三相主电源连线时需注意,不可换错相序。 5.电源开关闭合时,过流保护发光二极管可能会亮,只需按下对应的复位开关SB1
即可正常工作。 6.系统开环连接时,不允许突加给定信号U g起动电机。 7.起动电机时,需把MEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。 8.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。 9.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。 六.实验内容 1.移相触发电路的调试(主电路未通电) (a)用示波器观察MCL—33(或MCL—53,以下同)的双脉冲观察孔,应有双脉冲,且间隔均匀,幅值相同;观察每个晶闸管的控制极、阴极电压波形,应有幅值为1V~2V 的双脉冲。 (b)触发电路输出脉冲应在30°~90°范围内可调。可通过对偏移电压调节单位器及ASR输出电压的调整实现。例如:使ASR输出为0V,调节偏移电压,实现α=90°;再保持偏移电压不变,调节ASR的限幅电位器RP1,使α=30°。 2.求取调速系统在无转速负反馈时的开环工作机械特性。 a.断开ASR的“3”至U ct的连接线,G(给定)直接加至U ct,且Ug调至零,直流电机励磁电源开关闭合。 b.合上主控制屏的绿色按钮开关,调节三相调压器的输出,使U uv、Uvw、Uwu=200V。 注:如您选购的产品为MCL—Ⅲ、Ⅴ,无三相调压器,直接合上主电源。以下均同。 c.调节给定电压U g,使直流电机空载转速n0=1500转/分,调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载的范围内测取7~8点,读取整流装置输出电压U d 3.带转速负反馈有静差工作的系统静特性 a.断开G(给定)和U ct的连接线,ASR的输出接至U ct,把ASR的“5”、“6”点短接。 b.合上主控制屏的绿色按钮开关,调节U uv,U vw,U wu为200伏。 c.调节给定电压U g至2V,调整转速变换器RP电位器,使被测电动机空载转速n0=1500转/分,调节ASR的调节电容以及反馈电位器RP3,使电机稳定运行。 调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载范围内测取7~8
1 运动控制系统的任务是通过对电动机电压、电流、频率等输入电量的控制,来改变工作机械的转矩、速度、位移等机械量,使各种工作机械按人们期望的要求运行,以满足生产工艺及其他应用的需要。(运动控制系统框图) 2. 运动控制系统的控制对象为电动机,运动控制的目的是控制电动机的转速和转角,要控制转速和转角,唯一的途径就是控制电动机的电磁转矩,使转速变化率按人们期望的规律变化。因此,转矩控制是运动控制的根本问题。 第1章可控直流电源-电动机系统内容提要 相控整流器-电动机调速系统 直流PWM变换器-电动机系统 调速系统性能指标 1相控整流器-电动机调速系统原理 2.晶闸管可控整流器的特点 (1)晶闸管可控整流器的功率放大倍数在104以上,其门极电流可以直接用电子控制。(2)晶闸管的控制作用是毫秒级的,系统的动态性能得到了很大的改善。 晶闸管可控整流器的不足之处 晶闸管是单向导电的,给电机的可逆运行带来困难。 晶闸管对过电压、过电流和过高的du/dt与di/dt都十分敏感,超过允许值时会损坏晶闸管。 在交流侧会产生较大的谐波电流,引起电网电压的畸变。需要在电网中增设无功补偿装置和谐波滤波装置。 3.V-M系统机械特 4.最大失控时间是两个相邻自然换相点之间的时间,它与交流电源频率和晶闸管整流器的类型有关。 5.(1)直流脉宽变换器根据PWM变换器主电路的形式可分为可逆和不可逆两大类 (2)简单的不可逆PWM变换器-直流电动机系统 (3)有制动电流通路的不可 逆PWM-直流电动机系统 (4)桥式可逆PWM变换器 (5)双极式控制的桥式可逆PWM变换器的优点 双极式控制方式的不足之处 (6)直流PWM变换器-电动机系统的能量回馈问题 ”。(7)直流PWM调速系统的机械特性 6..生产机械要求电动机在额定负载情况下所需的最高转速和最低转速之比称为调速范围,用字母D来表示(D的表达式) 当系统在某一转速下运行时,负载由理想空载增加到额定值时电动机转速的变化率,称为静差率s。 D与s的相互约束关系 对系统的调速精度要求越高,即要求s越小,则可达到的D必定越小。 当要求的D越大时,则所能达到的调速精度就越低,即s越大,所以这是一对矛盾的指标。第二章闭环控制的直流调速系统 内容提要 ?转速单闭环直流调速系统 ?转速、电流双闭环直流调速系统 调节器的设计方法 1.异步电动机从定子传入转子的电磁功率可分成两部分:一部分是机械轴上输出的机械功率;另一部分是与转差率成正比的转差功率。.异步电动机按调速性能分类第一类基于稳态模型,动
运动控制仿真实验报告 姓名:班级:学号: ——晶闸管三相全控桥式整流仿真实验 ——实用 Buck 变换仿真实验 晶闸管三相全控桥式整流仿真实验(大电感负载) 原理电路:
R2 晶闸管三相可控整流仿真实验2原理电路框图 输入三相交流电,额定电压380伏(相电压220伏),额定频率50Hz,星型联接。输入变压器可省略。为便于理解电路原理,要求用6只晶闸管搭建全控桥。 实验内容: 1、根据原理框图构建Matlab仿真模型。所需元件参考下表: 仿真元件库:Simulink Library Browser 示波器Simulink/sink/Scope 要观察到整个仿真时间段的结果波形必须取消对输出数据的5000点限制。 要观察波形的FFT结果时,使能保存数据到工作站。仿真结束后即可点击仿真模型左上方powergui打开FFT窗口,设定相关参数:开始时间、分析波形的周期数、基波频率、最大频率等后,点Display即可看到结果。 交流电源SimPowerSystems/Electrical Sources/AC Voltage Source 设定频率、幅值、相角,相位依次滞后120度。 晶闸管SimPowerSystems/Power Electronics/Thyristor 6脉冲触发器SimPowerSystems/Extra Library/Control Blocks/Synchronized 6-Pulse Generator 设定为50Hz,双脉冲 利用电压检测构造线电压输入。Block端输入常数0. 输出通过信号分离器分为6路信号加到晶闸管门极,分离器输出脉冲自动会按顺序从1到6排列,注意按号分配给主电路对应晶闸管。 电阻、电容、电感SimPowerSystems/Elements/Series RLC Branch 设定参数 负载切换开关SimPowerSystems/Elements/Breaker 设定动作时间 信号合成、分离Simulink/Signal Routing/Demux,Mux 电流傅立叶分解SimPowerSystems/Extra Library/Discrete Measurements/Discrete Fourier 设定输出为50Hz,基波 有效值SimPowerSystems/Extra Library/Discrete Measurements/Discrete RMS value 设定为50Hz 位移功率因数计算Simulink/User-Difined Functions/Fcn 将度转换为弧度后计算余弦
厨房设备建设方案 1、主要施工方法 一)、工程概况 二)、工程特点 针对厨具设备采购及安装工程特点,我司做如下几点安排: 1、针对本工程的特点,必须组织足够的人力与物力,并且做好详尽而周密的施工计划 和组织安排,方能确保工程按时按质完成;因此,我司将做好内部统筹、外部协调,确保工程实施顺利进行。 2、本工程的施工技术要求高,必须确保施工质量的优良;设备调试工作和联合调试将 是最大的技术质量考核关键点。 3、本工程的工程量大,必须组织足够的人力与物力,并且厨房做好详尽而周密的施工 计划和组织安排,方能确保工程按时按质完成;同时由于工程量大,土建、装修及机电安装等单位将同期施工,会出现多专业、多人数同时进行交叉施工的场面,施工单位必须做好内部统筹、外部协调,确保工程实施顺利进行。 4、本工程的施工技术要求高,必须确保施工质量的优良;设备调试工作和联合调试将 是最大的技术质量考核关键点。 三)、安装工程主要内容 (1)给排水、供电系统安装相应水位,电位给出接驳点。 (2)炉具安装规整,炉面光滑平整,各阀门气掣开启自如。 (3)洗涤设备、星盆接头密封良好,阀门开启自如。 (4)安装台柜、吊柜平整,稳定不倾斜,不晃动,表面及四周光滑,无毛刺,柜门开启自动。 (5)外购机电设备安装。
(6)厨房设备水、电、气局部接驳及部分接驳。 (7)与厨房机电设备承包商配合,保证排烟、排风管道安装到位。(8)测试及验收:先单机测试,再总体运行。
2、主要施工机构设备表
3、人员安排表 (1).主要生产、施工人力 在本工程生产和施工过程中配备的劳动力,均由具备较高的制作安装技术和操作经验丰富的自身职工队伍组成。 (2).生产、施工班组主要职责 i.生产组:按照生产计划主要负责生产设备的开料、焊接、组装工作。 ii.安装组:按照现场施工计划,主要负责所有设备进场后的安装调试工作。 iii.电工组:主要负责现场施工安装好的动力电气接驳和调试工作。 iv.运输队:主要负责将生产好的设备搬运到施工工地的运输工作。
问答题部分 1、试述交流调速系统要获得工业应用的条件,为什么 条件:(1)使用高转子电阻电动机 (2)系统工作点只是沿着极限开环特性变化 原因:能够在恒转矩负载下扩大调整范围,并使电动机能够在较低转速下运行而不致过热。 2、简述交流软启动器的作用。 定义:软启动器是一种集软停车、轻载节能和多种保护功能于一体的新颖电机控制装置,它的主要构成是串接于电源与被控电极之间的三相反并联晶闸管及其电子控制电路。 作用:防止电动机启动电流过大损坏电机,或造成电网电压下降过大,使电机无法正常启动。 3、简述恒压频比控制方式。 绕组中的感应电动势是难以直接控制的,当电动势较高时,可以忽略定子绕组的漏磁阻抗压降,而认为定子相电压s g U E ≈,则得:1 s U f =常值 这是恒压频比的控制方式。但是,在低频时s U 和g E 都比 较小,定子阻抗压降所占的分量就比较显著,不再能忽略。这时,需要人为地把电压s U 抬高一些,以便近似地补偿定子压降。 4、交流电机矢量控制的基本思想是什么 基本思路:将异步电动机经过坐标变换等效在直流电动机,模仿直流电动机的控制策略,得到直流电动机的控制量,再经过相应的坐标反变换,控制异步电机。(关键词:坐标变换) 5、试分析矢量控制系统与直接转矩控制系统的优缺点。 VC 系统强调c T 与r ψ的解耦,有利于分别设计转速与磁链调节器,实现连续调节,可以获得较宽的调速范围,但是按 定向受电动机转子参数的影响,降低了系统的鲁棒性。DTC 系统则实行e T 与r ψ的砰-砰控制,避开了旋转坐标变换,简化了控制结构,控制定子磁链而不是转子磁链,不受转子参数变化的影响,但不可避免的产生转矩脉动,低速性能较差,调速范围受到限制。 6、试分析什么是转差频率控制转差频率控制的规律是什么(P188、189) 定义:控制转差频率就代表控制转矩,这就是转差频率控制的基本概念。 控制规律:(1)在s sm w w ≤的范围内,转矩e T 基本上与s w 成正比,条件是气隙磁通不变。 (2)在不同的定子电流值时,按下图的1s s U f w I =()函数关系控制定子电压和频率,就能 保持气隙磁通m Φ恒定。