机械工程控制基础试题集锦
一、填空题(20分)
1、系统的稳态误差与输入信号的形式及系统的结构和参数或系统的开环传递函数有关。
2、对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、快速 性和精确或准确性。
3、传递函数的定义是对于线性定常系统,在初始条件为零的条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
4、传递函数的组成与输入、输出信号无关,仅仅决定于系统本身的结构和参数,并且只适于零初始条件下的线性定常系统。
5、判别系统稳定性的出发点是系统特征方程的根必须为负实根或负实部的复数根,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。
6、频率响应是系统对正弦输入稳态响应,频率特性包括幅频和相频两种特性。
7、系统的性能指标按其类型可分为时域性能指标,频域性能指标,综合性能指标。 8、用频率法研究控制系统时,采用的图示法分为极坐标图示法和对数坐标_图示法。 9、系统稳定的充要条件是:系统的全部特征根都具有负实部。 10、对广义系统,按反馈情况可分为 开环系统 、 闭环系统 。
1. 对控制系统的基本要求一般可以归纳为稳定性、快速性 和准确性。
2. 按系统有无反馈,通常可将控制系统分为 开环控制系统 和 闭环控制系统 。 3. 在控制工程基础课程中描述系统的数学模型有微分方程 、传递函数等。
4. 稳态误差反映出稳态响应偏离系统希望值的程度,它用来衡量系统控制精度的程度。 5. 一阶系统
1
1
Ts +的单位阶跃响应的表达是/1t T e --。 6. 有系统的性能指标按照其类型分为时域性能指标和频域性能指标。 7. 频率响应是线性定常系统对正弦输入的稳态响应。
8. 稳态误差不仅取决于系统自身的结构参数,而且与输入信号的类型有关。 9. 脉冲信号可以用来反映系统的抗冲击能力。 10. 阶跃信号的拉氏变换是 1/s 。
1. 传递函数的定义是对于线性定常系统,在初始条件为零的条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
2. 瞬态响应是系统受到外加作用激励后,从初始状态到最终或稳定状态的响应过程。
3. 判别系统稳定性的出发点是系统特征方程的根必须为负实根或负实部的复数根,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。
4. I 型系统G s K
s s ()()
=
+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下,
稳态误差为 ∞ 。
5. 频率响应是系统对正弦输入稳态响应,频率特性包括幅频和相频两种特性。
6. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是(渐进)稳定的系统。
7. 传递函数的组成与输入、输出信号无关,仅仅决定于系统本身的结构和参数,并且只适于零初始条件下的线性定常系统。
8. 系统的稳态误差与输入信号的形式及系统的结构和参数或系统的开环传递函数有关。 9. 如果在系统中只有离散信号而没有连续信号,则称此系统为离散(数字)控制系统,其输入、输出关系常用差分方程来描述。
10. 反馈控制系统开环对数幅频特性三频段的划分是以ωc (截止频率)附近的区段为中频段,该段着重反映系统阶跃响应的稳定性和快速性;而低频段主要表明系统的稳态性能。 11. 对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、快速 性和精确或准确性。
35.机械工程控制论是研究该领域中系统的动力学问题。
36.一个环节的传递函数为Ts s G 200)(=,则该环节是微分环节。
37.表征二阶系统的性能指标中超调量仅与阻尼有关,阻尼越小则该指标越大。 38.两线性系统1
f 2f 及其拉氏变换21F F ,有常数21K K ,则
=+][2211f K f K L 2211F K F K +
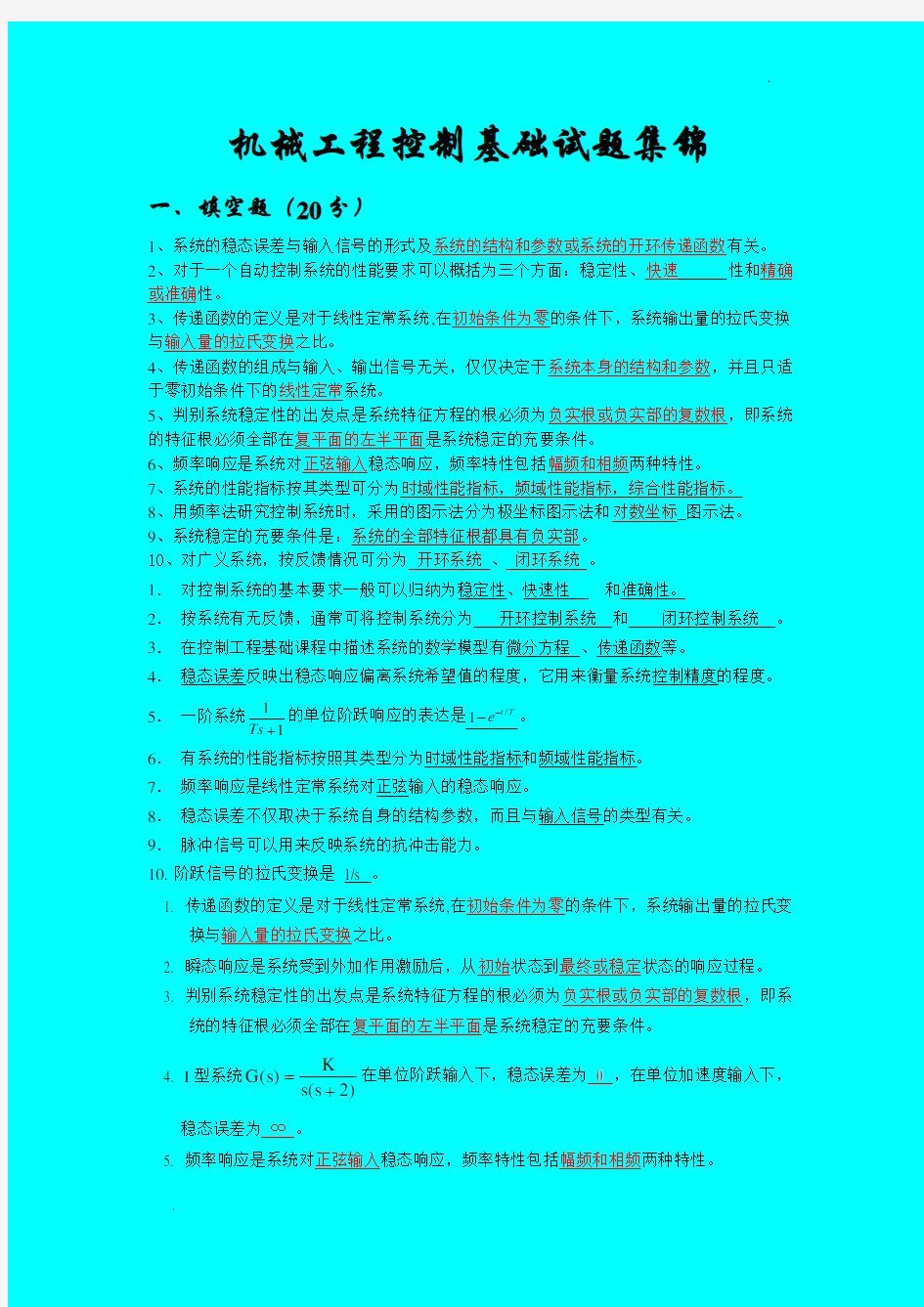
39.系统的波德图如下,则该系统是一阶惯性系统,其转折频率为1,在转折频率处的
相位角是-45,超过转折频率处曲线的斜率是-20dB/dec ,该系统具有低通特点。
40.线性系统最显著的特征是满足叠加性。
41.一阶系统的时间常数越小,系统瞬态响应过程越短,对斜坡输入的稳态误差是无穷
大。
42.线性系统输入为正弦信号时,该系统的输出也是同频率的正弦信号。
43.系统的稳态精度由系统的开环增益决定,而相对稳定性由相位裕量和幅值裕量来决
定。
44.工业中常用的PID 校正是指比例、积分、微分校正。
45.对自动控制系统的基本要求是稳定性、快速性、准确性。 46.系统时间响应由稳态响应和瞬态响应组成。
47.系统的稳态误差表达了系统的精度和抗干扰能力,是系统的性能之一。
48.系统稳定的必要和充分条件是特征方程的所有根都为负实数或者具有负实部的复数。 49.开环频率特性的低频段表征了闭环系统的稳态特性,中频段表征了闭环系统的动态
特性,高频段表征了闭环系统的复杂性。
50.系统的传递函数反映系统本身的动态特性,决定于系统本身的参数,与外界输入无
关。
51.对一个线性系统,当输入是正弦信号时,该系统的稳态输出也是同频率的正弦信号。 52.系统特征方程为0800200881422345=+++++s s s s s 则系统稳定或不稳定。 53.系统的瞬态响应反映了系统本身的动态特性,表征系统的相对稳定性和灵敏度。 54.振荡环节在转折频率处的相位角是-90 ,大于转折频率时的对数幅频特性曲线的渐
近线斜率为-40dB ,小于转折频率时的对数幅频特性曲线的渐近线斜率为0dB 。 55.二阶系统的无阻尼固有频率由系统本身的刚度和质量决定。
56.函数)(t f 及其一阶导数都可拉氏变换,则)(t f 的初值可表示为
∞→→?=s t s F s t f |)(lim |)(lim 0。
57.单位阶跃输入的拉氏变换为s
1。
58.开环频率特性的低频段表征了闭环系统的稳态特性,中频段表征了闭环系统的动态
特性,高频段表征了闭环系统的复杂性。
59.增加系统的开环增益可以提高系统的稳态精度和响应速度,但又会使相位裕量或者
幅值裕量减小,从而使系统的稳定性下降。 60.单位斜坡函数的拉普拉斯变换是1/S
2
61.一阶微分环节的传递函数)(1)(s T s G +=。
62.一阶惯性环节在转折频率时的相位角是-45 ,大于转折频率时的对数幅频特性曲线的渐近线斜率为-20Db/dec
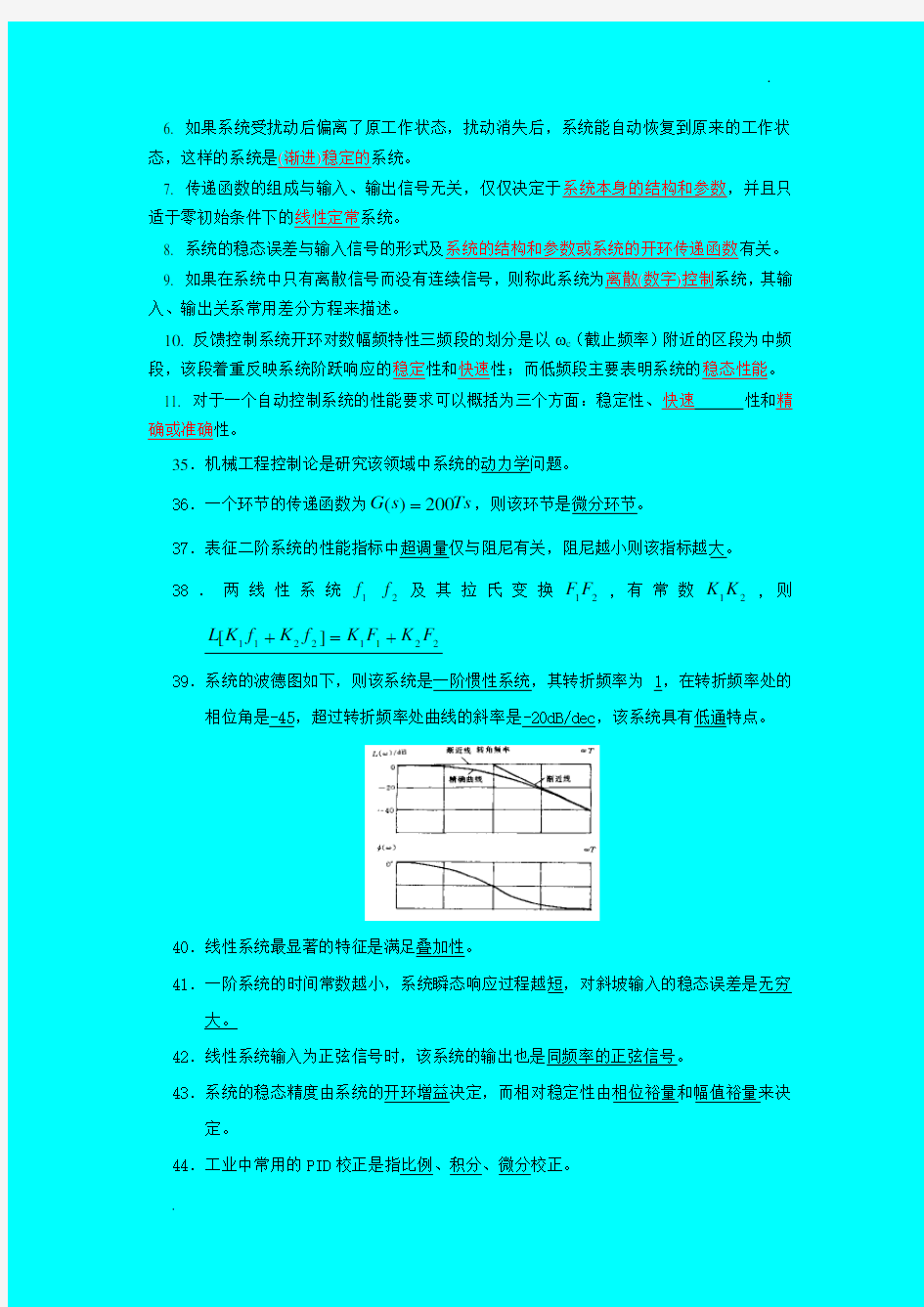
63.下图中的符号分别表示哪些性能指标
p M 表示最大超调量,r t 表示上升时间,p t 表示峰值时间,s t 表示调整时间
64.对I 型系统输入阶跃信号,则其稳态误差为零。 65.典型延时环节的传递函数为s e τ-。
二、选择题(20分)
1、拉氏变换将时间函数变换成 ( D )
A .正弦函数
B .单位阶跃函数
C .单位脉冲函数
D .复变函数
2、微分环节的频率特性相位移θ(ω)= ( A )
A. 90°
B. -90°
C. 0°
D. -180° 3、设系统的传递函数为G(s)=25
525
2
++s s ,则系统的阻尼比为 ( C ) A.25
B. 5
C. 2
1
D. 1
4、正弦函数sin t ω的拉氏变换是 ( B )
A.ω+s 1
B.2
2s ω+ω C.22s s ω+ D. 2
2s 1ω+ 5、比例环节的频率特性相位移θ(ω)= ( C )
A.90°
B.-90°
C.0°
D.-180°
6、一阶系统的阶跃响应, ( D ) A.当时间常数T 较大时有振荡 B.当时间常数T 较小时有振荡 C.有振荡 D.无振荡
7、系统特征方程式的所有根均在根平面的左半部分是系统稳定的 ( C )
A.充分条件
B.必要条件
C.充分必要条件
D.以上都不是
8、时域分析法研究自动控制系统时最常用的典型输入信号是 ( D )
A .脉冲函数
B .斜坡函数
C .抛物线函数
D .阶跃函数
9、令线性定常系统传递函数的分母多项式为零,则可得到系统的 ( B )
A .代数方程
B .特征方程
C .差分方程
D .状态方程 10、线性定常系统的传递函数,是在零初始条件下 ( D )
A .系统输出信号与输入信号之比
B .系统输入信号与输出信号之比
C .系统输入信号的拉氏变换与输出信号的拉氏变换之比
D .系统输出信号的拉氏变换与输入信号的拉氏变换之比
1.单位脉冲响应函数为t t h 189)(=,则系统的传递函数为 【 A 】 A .
2189
s
B .
s
189
C .
2189
s
D .
s
189
2.关于叠加原理,下列叙述正确的是 【 B 】 A .适合于非线性定常系统 B .适合于线性定常系统
C .适合于所有系统
D .适合于非线性系统
3.对于一阶系统s e s s G 81
2.31
)(-+=,则该系统可看成下述环节由串联而成
【 A 】 A .惯性环节、延时环节 B .比例环节、惯性环节、延时环节
C .惯性环节、超前环节
D .比例环节、惯性环节、超前环节
4.若二阶阻尼系统的无阻尼固有频率为n ω,则有阻尼固有频率d ω为 【 C 】 A .等于n ω
B .大于n ω
C .小于n ω
D .与n ω无关 5
.下
列
叙
述
正
确
的
是
【 C 】
A .时域响应只能分析系统的瞬态特性
B .频率响应只能分析系统的稳
态特性 C .时域响应和频率响应都能揭示系统的动态特性D .频率响应无量纲 6
.
关
于
线
性
系
统
的
正
确
描
述
是
【 C 】 A .都可以用传递函数表示 B .只能用传递函数表示 C .可以用不同模型描述 D .都是稳定的 7
.
已
知
环
节
的
波
德
图
如
下
图
,
则
该
环
节
为
【 B 】
A .比例环节
B .微分环节
C .积分环节
D .惯性环节
8.对于二阶系统而言,阻尼比越大,系统的 【 B 】 A .相对稳定性越差 B .相对稳定性越好 C .稳态误差越小 D .稳态误差越大 9
.
属
于
系
统
时
域
的
数
学
模
型
是
【 C 】
A .频率特性
B .传递函数
C .微分方程
D .频响函数
10.一线性系统的特征方程为)()(5)(3)(22
3
t x t t x t x t x
?=++ 则该系统是 【 C 】 A .线性定常系统
B .线性系统
C .非线性系统
D .非线性时变系统
11.典型环节的传递函数为:)1/(1)(s s G +=,该环节为: 【 A 】 A .惯性环节
B .积分环节
C .微分环节
D .比例环节
12.系统的微分方程为F t x t x t x
4)(3)(2)(=++ ,系统的极点为 【 A 】
A .21j s ±-=
B .j s ±=
2
C .01=s j s ±=
223
D .全不是
13.关于线性系统响应时间的描述正确的是: 【 C 】
A .时间响应为系统输出的稳态值
B .由单位阶跃响应和单位脉冲响应组成
C .由强迫响应和自由响应组成
D .与系统初始状态无关 14.已知系统传递函数4
4
)(2++=s s s G ,则阻尼比为: 【 A 】
A .0.25
B .0.5
C .1
D .2
15.二阶振荡系统的阻尼比为7.00<<ζ,则关于无阻尼固有频率n ω,有阻尼固有频
率
d
ω,振荡频率
r
ω的关系
【 C 】
A .r d n ωωω<<
B .d r n ωωω<<
C .n d r ωωω<<
D .r n d ωωω<< 16.单位反馈系统的传递函数)
9)(4)(2(1
)(--++=s s s s s G ,则系统
【 B 】 A .稳定
B .不稳定
C .临界稳定
D .无法判断
17.单位反馈闭环系统的误差为零时,则输出 【 C 】 A .为0
B .停止改变
C .等于希望值
D .无法判断
18.一阶微分环节G(s)=1+Ts ,当频率ω=1时,则相频特性∠G(jω)为 【 A 】 A. 45° B. -45° C. 90° D. -90°
19.对于稳定系统,幅值裕量Kg 为 【 A 】 A .大于0dB
B .小于0 dB
C .小于等于0 dB
D .等于1 20
.
系
统
传
递
函
数
【 B 】 A .与外界无关
B .反应了系统、输入、输出的关系
C .完全反应系统的动态特性
D .与系统初始状态有关
21
.
线
性
系
统
稳
定
与
否
取
决
于
【 A 】
A .系统的结构和参数
B .系统的输入
C .系统的干扰
D .系统的初始状态 22
.
减
小
一
阶
系
统
的
时
间
常
数
,
则
系
统
【 C 】
A .系统准确定变差
B .系统响应变慢
C .系统响应快
D .稳定性变差
23.欠阻尼二阶系统而言,瞬态响应的超调量表征了系统的 【 D 】 A .系统的可靠性 B .系统的准确性