AAU3213天线权值配置指导书
1 操作前核查
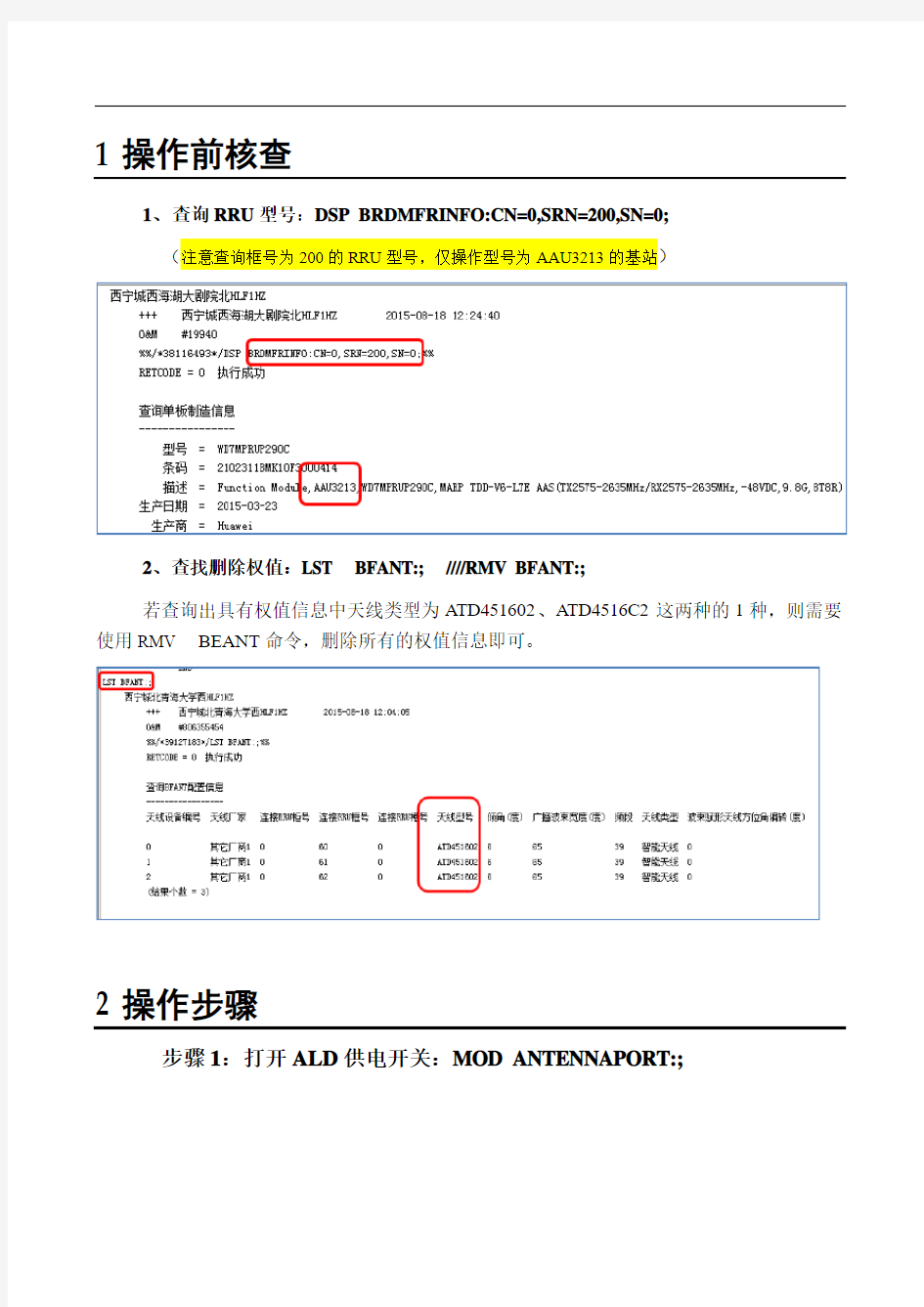
1、查询RRU型号:DSP BRDMFRINFO:CN=0,SRN=200,SN=0;
(注意查询框号为200的RRU型号,仅操作型号为AAU3213的基站)
2、查找删除权值:LST BFANT:; ////RMV BFANT:;
若查询出具有权值信息中天线类型为ATD451602、ATD4516C2这两种的1种,则需要使用RMV BEANT命令,删除所有的权值信息即可。
2 操作步骤
步骤1:打开ALD供电开关:MOD ANTENNAPORT:;
步骤2:查询ALD开关状态:DSP ANTENNAPORT:;
步骤3:扫描天线信息:SCN ALD:;
步骤4:添加RET设备:ADD RET
参数设置按照下表进行:
注:请在添加天线2~3分钟后设置天线下倾角。(即步骤5)
步骤
5:修改内置电下倾:MOD RETSUBUNIT
步骤6:查询天线的实际下倾角:DSP RETSUBUNIT
命令查询天线的实际下倾角,验证实际下倾角与设置下倾角是否一致。
注:后续步骤为添加内置方位角的步骤
步骤7:添加RAE :ADD RAE
参数按照下表配置即可:
步骤8:检查RAE状态:DSP RAESUBUNIT
步骤9:修改RAE子单元:MOD RAESUBUNIT
步骤10:添加天线权值信息:ADD BFANT
步骤11:修改电子水平方位角:MOD BFANT
抛物面天线的工作原理 普通抛物面天线的结构如图3-1所示。馈源是一种弱方向性天线,安装在抛物面前方的焦点位置上,故普通抛物面天线又称为前馈天线。由馈源辐射出来的球面波被抛物面往一个方向(天线轴向)反射,形成尖锐的波束,这种情况与探照灯极为相似。 图 3-1 普通抛物面天线的结构图图 3-2 普通抛物面天线的几何关系图 抛物面是由抛物线绕它的轴线(z轴)旋转而成的,如图3-2所示。在yoz平面上,以F为焦点,O 为顶点的抛物线方程为: 相应的立体坐标方程为: 为了便于分析,也可引入极坐标。令极坐标系(ρ,ψ) 的原点与焦点F重合,则相应的旋转抛物面的方程可表示为: 设D为抛物面口径的直径,为口径对焦点所张的角(简称口径张角),由上述关系式可导出决定抛物面口径张角的抛物面焦径比: 焦径比的大小表征了抛物面的结构特征,f/D越大,口径张角越小,抛物面越浅,加工就容易,但馈源离主反射面越远,天线的抗干扰能力就越差,反之亦然。 抛物面具有如下重要的几何光学特性:由焦点发出的各光线经抛物面反射,其反射线都平行于z轴;反之,当平行光线沿z轴入射时,则被抛物面反射而聚焦于F点。其原因是,由焦点发出的各光线经抛物面反射后到达口径面的行程相等(这一结论可利用抛物线的以下性质来证明:从抛物线任一点到焦点的距离等于该点到准线的距离)。
微波的传播特性与光相似,因此,位于焦点F的馈源所辐射的电磁波经抛物面反射后,在抛物面口径上得到同相波阵面,使电磁波沿天线轴向传播。如果抛物面口径尺寸为无限大,那么抛物面就把球面波变为理想平面波,能量只沿z轴正方向传播,其它方向辐射为零。但实际上抛物面的口径是有限的,这时天线的辐射是波源发出的电磁波通过口径面的绕射,它类似于透过屏上小孔的绕射,因而得到的是与口径大小及口径场分布有关的窄波波束。 3.2.2 偏馈天线 前馈抛物面天线的馈源位于天线的主波束内,因而对所接收的电磁波形成了遮挡,其结果降低了天线的增益,增大了旁瓣。将馈源移出天线反射面的口径,可消除馈源及其支撑物对电磁波的遮挡。图3-3示出了偏馈反射面天线的结构示意图。 实际上,偏馈反射面是在旋转抛物反射面上截取一部分而构成的。它同样可将焦点发出的球面波转换成沿轴向传播的平面波。馈源的相位中心仍放在原抛物面的焦点上,但馈源的最大辐射须指向偏馈反射面的中心。尽管反射面的轮廓呈椭圆型,但它的口径仍是一个圆。此外,对于偏馈天线而言,电磁波的最大辐射方向并不在偏馈反射面的法向,而是与法向成一定的夹角。这一特点也是偏馈天线的另一特 色,如图3-4所示。对于偏馈天线有式中,ψo是抛物面轴线与焦点到反面中心联线的夹角。反射面在这条中心两旁张成2ψe的角度。 图 3-3 偏馈天线的结构图 图 3-4 偏馈反射面天线的几何关系图
《模糊控制》实验指导书李士勇沈毅周荻邱华洲袁丽英 实验名称: 实验地点: 指导教师: 联系电话: Harbin Institute of Technology 2005.3
模糊控制实验指导书 一、 实验目的 利用Matlab 软件实现模糊控制系统仿真实验,了解模糊控制的查询表方法和在线推理方法的基本原理及实现过程,并比较模糊控制和传统PID 控制的性能的差异。 二、 实验要求 设计一个二维模糊控制器分别控制一个一阶被控对象1 1 )(11+=s T s G 和二阶被控对象) 1)(1(1 )(212++= s T s T s G 。先用模糊控制器进行控制,然后改变控制对 象参数的大小,观察模糊控制的鲁棒性。为了进行对比,再设计PID 控制器,同样改变控制对象参数的大小,观察PID 控制的鲁棒性。也可以用其他语言编制模糊控制仿真程序。 三、 实验内容 (一)查询表式模糊控制器实验设计 查询表法是模糊控制中的最基本的方法,用这种方法实现模糊控制决策过程最终转化为一个根据模糊控制系统的误差和误差变化(模糊量)来查询控制量(模糊量)的方法。本实验利用了Matlab 仿真模块——直接查询表(Direct look-up table )模块(在Simulink 下的Functions and Tables 模块下去查找),将模糊控制表中的数据输入给 Direct look-up table ,如图1所示。设定采样时间(例如选用0.01s ),在仿真中,通过逐步调整误差量化因子Ke ,误差变化的量化因子Kec 以及控制量比例因子Ku 的大小,来提高和改善模糊控制器的性能。
智能控制理论及应用 (实验指导书) 实验一模糊控制的理论基础实验 实验目的: 学习隶属函数编程;模糊矩阵合成运算编程;模糊推理运算编程。 1隶属函数编程 学习P39 例2-12 (以下为例程) 完成思考题P80 2-2 写出W及V两个模糊集的隶属函数,并绘出“非常老,很老,比较老,有点老”的四个隶属度函数仿真后的曲线。 %Membership function for old People clear all; close all; for k=1:1:1001 x(k)=(k-1)*0.10; if x(k)>=0&x(k)<50 y(k)=0; else y(k)=1/(1+(1/((x(k)-50)/5)^2)); end end plot(x,y,'k'); xlabel('X Years');ylabel('Degree of membership'); 2 模糊矩阵合成仿真程序 学习P31例2-10,仿真程序如下。 完成思考题P81 2-5,并对比手算结果。 clear all; close all; A=[0.2,0.8; 0.6,0.1]; B=[0.5,0.7; 0.1,0]; %Compound of A and B for i=1:2 for j=1:2 AB(i,j)=max(min(A(i,:),B(:,j)')) end end
3 模糊推理仿真程序 学习P47 例2-16,仿真程序如下。 完成思考题2-9,并对比手算结果。 clear all close all a=[1;0.5] b=[0.1;0.5;1] c=[0.2;1] for i=1:2 for j=1:3 ab(i,j)=min(a(i),b(j));%求出D end end t1=[]; for i=1:2 t1=[t1;ab(i,:)']; end %准备好DT; for i=1:6 for j=1:2 r(i,j)=min(t1(i),c(j)); end end %求出R a1=[0.8;0.1] b1=[0.5;0.2;0] for i=1:2 for j=1:3 ab1(i,j)=min(a1(i),b1(j)); %求出D1 end end t2=[]; for i=1:2 t2=[t2;ab1(i,:)']; end for i=1:6 for j=1:2 d(i,j)=min(t2(i),r(i,j)); c1(j)=max(d(:,j)); end end
面天线的结构和工作原理 一、抛物面天线 (一)抛物面天线的结构 常用的抛物面天线从结构上看,主要由两部分组成: 照射器,由一些弱方向性天线来担当,想短电对称振子天线,喇叭天线。 作用:是把高频电流转换为电磁波并投射到抛物面上。 抛物面,它一般有导电性能较好的铝合金板构成,其厚度为1.5-3(mm),或者用玻璃钢构成主抛物面,然后在其内表面粘贴一层金属网或金属栅栏。网孔的最大值要求小于λ/8-λ/10,过大将造成对电磁波的漏射现象,影响天线的正常工作性能。 作用:构成天线辐射场方向性的主要部分。 图 1-1 普通抛物面天线的结构图图 1-2 普通抛物面天线的几何关系图(二)工作原理 抛物面具有如下重要的几何光学特性:由焦点发出的各光线经抛物面反射,其反射线都平行于z轴;反之,当平行光线沿z轴入射时,则被抛物面反射而聚焦于F点。其原因是,由焦点发出的各光线经抛物面反射后到达口径面的行程相等(这一结论可利用抛物线的以下性质来证明:从抛物线任一点到焦点的距离等于该点到准线的距离)。 微波的传播特性与光相似,因此,位于焦点F的馈源所辐射的电磁波经抛物面反射后,在抛物面口径上得到同相波阵面,使电磁波沿天线轴向传播。如果抛物面口径尺寸为无限大,那么抛物面就把球面波变为理想平面波,能量只沿z轴正方向传播,其它方向辐射为零。但实际上抛物面的口径是有限的,这时天线的辐射是波源发出的电磁波通过口径面的绕射,它类似于透过屏上小孔的绕射,因而得到的是与口径大小及口径场分布有关的窄波波束。 二、卡塞格伦天线
(一)卡塞格伦天线的结构 卡塞格伦天线是一种双反射面天线,其主反射面是旋转抛物面,副反射面是旋转双曲面。卡塞格伦天线的结构与普通抛物面天线的差别,不仅在于多了一个副反射面,而且把馈源安装到了主反射面后面上,如图1-3所示。故有时也把卡塞格伦天线称为后馈天线。 图 1-3 卡塞格伦天线的结构图 (二)卡塞格伦天线的工作原理 卡塞格伦天线的工作原理是,根据双曲面的性质,由F2发出的电磁波被副面反射,其反射的电磁波方向可以看成是共轭焦点F1发出的射线方向。又因为F1是抛物面的焦点,所以,由F2发出的电磁波经副反射面和主反射面反射后,在口径面形成同相场,从而得到平行于轴向的电磁辐射波。 双反射面的优点之一在于可以采用赋形技术。如果修正旋转双曲面的形状,使口径场分布符合要求,同时适当地修改主面以校正由于副面改变而引起的口径场相位差,那么,卡塞格伦天线将有较高的电性能。但卡塞格伦天线的副面直径一般要取较大,这在小口径天线中会造成较大的遮挡,所以在小天线中很少采用卡塞格伦结构方案。
天线是卫星通信系统的重要组成部分,是地球站射频信号的输入和输出通道,天线系统性能的优劣影响整个通信系统的性能。地球站与卫星之间的距离遥远,为保证信号的有效传输,大多数地球站采用反射面型天线。反射面型天线的特点是方向性好,增益高,便于电波的远距离传输。 反射面的分类方法很多,按反射面的数量可分为双反射面天线和单反射面天线;按馈电方式分为正馈天线和偏馈天线;按频段可分为单频段天线和多频段天线;按反射面的形状分为平板天线和抛物面天线等。下文对一些常用的天线作简单介绍。 1.抛物面天线 抛物面天线是一种单反射面型天线,利用轴对称的旋转抛物面作为主反射面,将馈源置于抛物面的焦点F上,馈源通常采用喇叭天线或喇叭天线阵列,如图1所示。发射时信号从馈源向抛物面辐射,经抛物面反射后向空中辐射。由于馈源位于抛物面的焦点上,电波经抛物面反射后,沿抛物面法向平行辐射。接收时,经反射面反射后,电波汇聚到馈源,馈源可接收到最大信号能量。
图1 抛物面天线 抛物面天线的优点是结构简单,较双反射面天线便于装配。缺点是天线噪声温度较高;由于采用前馈,会对信号造成一定的遮挡;使用大功率功放时,功放重量带来的结构不稳定性必须被考虑。 2.卡塞格伦天线 卡塞格伦天线是一种双反射面天线,它由两个发射面和一个馈源组成,如图2所示。主反射面是一个旋转抛物面,副反射面为旋转双曲面,馈源置于旋转双曲面的实焦点F1上,抛物面的焦点与旋转双曲面的焦点重合,即都位于F2点。从从馈源辐射出来的电磁波被副反射面反射向主反射面,在主反射面上再次被反射。由于主反射面的焦点与副反射面的焦点重合,经主副反射面的两次反射后,电波平行于抛物面法向方向定向辐射。对经典的卡塞格伦天线来说,副反射面的存在遮挡了一部分能量,使得天线的效率降低,能量分布不均匀,必须进行修正。修正型卡塞格伦天线通过天线面修正后,天线效率可提高到0.7—0.75,而且能量分布均匀。目前,大多数地球站采用的都是修正型卡塞格伦天线。 卡塞格伦天线的优点是天线的效率高,噪声温度低,馈源和低噪声放大器可以安装在天线后方的射频箱里,这样可以减小馈线损耗带来的不利影响。缺点是副反射面极其支干会造成一定的遮挡。
《智能控制技术》实验报告书 学院: 专业: 学号: 姓名:
实验一:模糊控制与传统PID控制的性能比较 一、实验目的 通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。 二、实验内容 本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。 通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1) 控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。 设计系统的模糊控制,并与传统的PID控制的性能进行比较。 三、实验原理、方法和手段 1.实验原理: 1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID 控制器参数k p、k i、k d; 2)根据模糊控制规则,编写模糊控制器。 2.实验方法和手段: 1)在PID控制仿真中,经过仔细选择,我们取k p=5,k i=0.1,k d=0.001; 2)在模糊控制仿真中,我们取k e=60,k i=0.01,k d=2.5,k u=0.8; 3)模糊控制器的输出为:u= k u×fuzzy(k e×e, k d×e’)-k i×∫edt 其中积分项用于消除控制系统的稳态误差。 4)模糊控制规则如表1-1所示: 在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=t d/T),umin用于表示控制的死区电平,umax用于表示饱和电平。当Nd=0时,表示系统不存在纯延迟。 5)根据上述给定内容,编写PID控制器、模糊控制器的MATLAB仿真程序,
过程控制系统实验指导书 王永昌 西安交通大学自动化系 2015.3
实验一先进智能仪表控制实验 一、实验目的 1.学习YS—170、YS—1700等仪表的使用; 2.掌握控制系统中PID参数的整定方法; 3.熟悉Smith补偿算法。 二、实验内容 1.熟悉YS-1700单回路调节器与编程器的操作方法与步骤,用图形编程器编写简单的PID仿真程序; 2.重点进行Smith补偿器法改善大滞后对象的控制仿真实验; 3.设置SV与仿真参数,对PID参数进行整定,观察仿真结果,记录数据。 4.了解单回路控制,串级控制及顺序控制的概念,组成方式。 三、实验原理 1、YS—1700介绍 YS1700 产于日本横河公司,是一款用于过程控制的指示调节器,除了具有YS170一样的功能外,还带有可编程运算功能和2回路控制模式,可用于构建小规模的控制系统。其外形图如下: YS1700 是一款带有模拟和顺序逻辑运算的智能调节器,可以使用简单的语言对过程控制进行编程(当然,也可不使用编程模式)。高清晰的LCD提供了4种模拟类型操作面板和方便的双回路显示,简单地按前面板键就可进行操作。能在一个屏幕上对串级或两个独立的回路进行操作。标准配置I/O状态显示、预置PID控制、趋势、MV后备手动输出等功能,并且可选择是否通信及直接接收热偶、热阻等现场信号。对YS1700编程可直接在PC机上完成。
SLPC内的控制模块有三种功能结构,可用来组成不同类型的控制回路:(1)基本控制模块BSC,内含1个调节单元CNT1,相当于模拟仪表中的l台PID调节器,可用来组成各种单回路调节系统。 (2)串级控制模块CSC,内含2个互相串联的调节单元CNTl、CNT2,可组成串级调节系统。 (3)选择控制模块SSC,内含2个并联的调节单元CNTl、CNT2和1个单刀三掷切换开关CNT3,可组成选择控制系统。 当YS1700处于不同类型的控制模式时,其内部模块连接关系可以表示如下:(1)、单回路控制模式
Efficient Feed for Offset Parabolic Antennas for 2.4 GHz Dragoslav Dobri?i?, YU1AW 2.4GHz 抛物面天线的高效馈源 Resume 摘要 This article examines some of the possible solutions to the problems of efficiently illuminating SAT TV offset parabolic antennas in the use on WLAN frequencies of 2.4 GHz.. 本文探讨用于2.4GHz频段的卫星电视偏馈抛物面天线的馈源的解决办法。 Introduction 引言 The problems that occur while illuminating shallow offset parabolic dishes, in addition to those related to the efficient use of parabolic dishes generally are additionally aggravated by the specific geometry of the parabolic mirror itself. [2] Feed positioning in the way that its phase center exactly coincides with the focus of the offset parabolic dish and its aiming so that the radiation maximum falls in the geometric center of the elliptic reflector surface are not intuitive at all, as in classic parabolic antennas. Therefore, there is much confusion and many wrongly positioned feeds that do not correctly illuminate offset parabolic dishes, decreasing their efficiency and gain. 这个问题时常存在于一些浅照射的偏馈抛物面天线,除了和抛物面天线有效利用有关之外,抛物面反射镜本身的具体尺寸[2]又使之更加严重。馈源的定位方式——其相位中心必须严格与偏馈抛物面天线的焦距保持一致,而且对准。这样,其最大辐射值落在椭圆形反射面的几何中心,是不直观的,正如在经典抛物线天线那样。因此,有许多混乱,许多错误的馈源定位,不能正确地照射偏馈抛物面天线,降低了它们的效率和增益。 The optimal feed for some given parabola has to fulfill several important characteristics: 对于给定抛物面天线最佳馈源必须具有几个重要特点: 1.The radiation angle of the main beam, between the points in which the gain is -10dB in relation to the maximal value, has to match the subtended angle. The feed radiation angle, both in horizontal and in vertical plane has to be the same, regardless the ellipticity of offset parabola. 1、主束的辐射角度,在辐射功率为-10dB的点到最大值之间,必须与张角相配。馈源的辐射角在水平和垂直都应当相同。而不管偏馈抛物面的椭圆率如何。 2.The phase center of the feed has to be well defined and stable with changes of frequencies within the working range. The change of the phase within the whole angle of illumination has to be as small as possible.
工学院课程考核论文 课程名称:微波技术与天线 题目:板状天线基本原理及分析专业:电子信息工程 班级:08级1班 姓名:李亮亮 学号:1665080115 任课教师:张平娟
摘要 本文主要介绍了板状天线的原理以及做出相应的分析。 由于微带天线具有重量轻、低剖面、成本低、易于制造、封装和安装等许多固有的优点,本文选用微带贴片天线作为天线单元。首先采用传输线法和腔模理论对矩形微带天线进行分析,计算出矩形贴片的长,宽,并选择基板材料和高度。然后针对设计指标详细讨论了各种因素对微带贴片天线性能的影响,用背馈的方式完成了微带贴片天线单元的设计方案,从而简化馈电网络。 板状天线基本原理及分析 一.板状天线基本原理 板状天线的基本知识: 无论是GSM 还是CDMA,板状天线是用得最为普遍的一类极为重要的基站天线。这种天线的优点是:增益高、扇形区方向图好、后瓣小、垂直面方向图俯角控制方便、密封性能可靠以及使用寿命长。板状天线也常常被用作为直放站的用户天线,根据作用扇形区的范围大小,应选择相应的天线型号。 图1-1板状天线的基本形式 如图所示,板状天线是在阵列天线或者天线单元的下方加上一块反射板,使波束往前方发射,利用反射板可把辐射能控制到单侧方向,平面反射板放在阵列的一边构成扇形区覆盖天线。下面的图1-2说明了反射面的作用,反射面把功率反射到单侧方向,提高了增益。天线的基本知识全向阵(垂直阵列不带平
面反射板)。抛物反射面的使用,更能使天线的辐射,像光学中的探照灯那样,把能量集中到一个小立体角内,从而获得很高的增益。不言而喻,抛物面天线的构成包括两个基本要素:抛物反射面和放置在抛物面焦点上的辐射源,基站天线可供设计的参数是天线的垂直波瓣和水平波瓣,垂直波瓣是通过阵列天线来实现的,而水平波瓣是由所采用的天线单元样式和相应的反射板所决定。 图1-2水平面方向图 板状天线高增益的形成: 1.采用多个半波振子排成一个垂直放置的直线阵,如图1-3 图1-3直线阵的方向和模型 2.在直线阵的一侧加一块反射板(以带反射板的二半波振子垂直阵为例),如图2-4
卫视经纬版 电子报/2002年/04月/21日/第008版/ 自制大口径抛物面天线 江西张敏 本人对大口径抛物面天线心仪已久,可惜该类天线价格不菲。无奈之下,本人遂蒙生自制的念头。经过深思熟虑,年前动手试制,竟一举成功!高兴之余,现将关键工艺介绍如下,愿与有志之士共享! 一、精工制作抛物线模具 常常听人告诫:抛物面天线精度高,手工打造的天线,只能当作摆设!为此,本人特别设计如下制作工艺,经实践证明,方法简单,一试即成! 抛物面天线直径2.4m,焦距1.2m,抛物线标准方程式:Y2= 4.8X 取刨花板(2.4m 1.2m)一块,水平放置于地上,在上面精确画出Y2= 4.8X的抛物线。用手锯沿抛物线锯开,即得到一条标准的抛物线截面。用扁铁沿抛物线截面绷紧并钉牢,这样就获得了一条光滑、坚硬的抛物线截面模具。 将刨花板垂直安置在地面上,并用铅垂线校正,以确保X轴垂直于地平面。最后,将模具牢牢固定即可(见图1)。 二、制作抛物线天线骨架 天线骨架由6个不同直径的钢筋圆圈和6条固定钢筋焊接而成。钢筋圆圈的制作数据见下表。 用 14mm的钢筋在弯管机上分别弯制出6、5、4、3、2、1圆圈,并用电焊焊好接头。将圆圈6水平安放到模具上,用水平仪校正,然后牢牢固定,用同样的方法,将圆5安装到模具上。然后取两小段钢筋,用电弧焊将圆5和圆6沿抛物线对称焊牢。圆4、3、2、1和0原点钢板均照此方法安装并焊牢。最后,用 2.5mm铁钉从钢板中心孔钉入模具抛物线截面顶点O内。 至此,抛物面天线骨架已焊接成一个整体了,将此骨架顺时针旋转60,沿着抛物线对称焊入两根固定筋。照此方法,将6根固定筋全部焊牢,天线骨架制作完毕。 三、安装反射网 反射网就地取材,无特殊要求。本人在一家电焊店购得两张镀锌铁丝网(下脚料),将它们沿对角线剪开,得到4张三角形铁丝网。将天线骨架从模具上取下来,把4张铁丝网压入骨架并初步整平固定,然后放在模具上,压平压紧,用铁丝固定。接着将骨架顺时针转动一个小角度,压平压紧铁丝网,用铁丝固定。照此方法,将铁丝网固定到骨架上。最后,还要用模具精确校正一遍,以确保操作精度。 四、安装支架 用一根长0.9m和一根长1.2m的钢筋焊成一个直角。将1.2m钢筋的一端固定到焦点处,将0.9m钢筋的一端与圆6焊牢。在焦点处可配焊一小段角铁,便于安装下变频器件(见图2)。 五、安装基座及调试 安装调试方法报刊上介绍较多,本文不再赘述。在天线调整好方位角和仰角后,根据具体情况,在内架上焊入3~4根钢筋以固定天线。笔者将该天线喷上草绿色油漆安放在小院内的绿色树丛中,与环境非常协调、融洽。
SCARA机器人实验指导书哈尔滨科利达智能控制技术有限公司
SCAR/教学机器人简介 KLD—400教学机器人有3个旋转关节,其轴线相互平 行,在平面内进行定位和定向。另一个关节是移动关节,用于完 成末端件在垂直平面的运动。手腕参考点的位置由两旋转关节的 角位移①1和①2,及移动关节的位移Z决定的,即P= f(①1,①2, Z), SCARA教学机器人为平面关节型机器人,本机器人采用 伺服电机和步进电机驱动,控制简单,编程方便, KLD—400 教学机器人是专为满足高等院校机电一体化、自动控制等专业 进行机电及控制课程教学实验需要和相关工业机器人应用培训 需要而最新开发的四自由度机器人,它是一个多输入多输出的动 力学复杂系统,是进行控制系统设计的理想平台;它具有高度的 能动性和灵活性,具有广阔的可达空间,是进行运动规划和编程系统设计的理想对象。除教学和培训外,KLD—400还可用于细小零件的搬运和电子元件的装配等工业作业。 系统特点 ?机构采用平面关节型(SCAR)结构,按工业标准要求设计,速度快、柔性好; ?采用交流伺服电机和谐波减速器等,模块化结构,简单、紧凑,完全满足实验的要求; ; ?控制系统采用Windows系列操作系统,二次开发方便、快捷,适于教学实验 ?提供通用机器人语言编程系统,可通过图形示教自动生成机器人语言等程序; ?提供实验教材,内容涵盖机器人运动学、动力学、控制系统的设计、机器人轨迹规划等。用户可以从中选择相关内容满足不同层次的教学实验需要。 ?性价比高;适于在高等院校大范围推广。 系统配置 ?硬件平台:KLD—400系列伺服运动控制器和微机平台(PC用户自备,带 ISA插槽) ?软件平台:1)Windows操作系统;2)KLD—400机器人图形示教软件 技术参数 结构形式平面关节式(SCARAB) 负载能力1kg 运动精度(脉冲当量/转)关节112800 关节212800 关节3800pulse/mm 关节41600 未端重复定位精度± 0.1mm 每轴最大运动范围关节10~270° 关节20~200° 关节30~60mm 关节40~345°
卡塞格伦天线的工作原理 时间:2015-08-10 来源:天线设计网TAGS:卡赛格伦 我们已经知道,反射面天线的方向图形状(波束指向、主瓣宽度、副瓣电平)决定于天线口径上的场(或电流)分布。而口径场分布又由馈源的方向图和反射面的形状确定。改变反射面的形状,即采用长焦距的反射面来得到较均匀的口径场分布。但是,焦距变长之后,天线纵向尺寸变大,这不仅使结构上不便,而且馈线变长会增加损耗,对远距离通讯来说增加噪声,降低效率。 另外,要获得低副瓣(如-40dB),口径场振幅分布还不能是均匀的,应满足一定分布规律。这由单反射面和一个馈源来调整是困难的。采用双反射面天线,可方便地控制口径场分布。既可以使反射面的焦距较短,又可保证得到所需的天线方向图,而且使设计增加了灵活性。双反射面天线系统的设计起源于卡塞格伦光学望远镜。这种光学望远镜以其发明人卡塞格伦Cassegrain命名。下图为中国科学院国家天文台、中电集团39所联合研制的 40米射电望远镜,位于中科院云南天文台(昆明东郊凤凰山),于2005年8月动工兴建,2006年5月投入运行。40米射电望远镜的主要任务,是接收嫦娥卫星下行的科学数据并参与完成对绕月卫星的精密测轨。 40米射电望远镜是一台转台式卡塞格伦型天线,总重约360吨。天线主反射面直径40米,由464块铝合金实体单块面板和不锈钢网状单块面板构成,中央(直径26米以内部分)由208块实体单块面板构成,周边直径26米至40米部分则由256块网状单块面板构成。正十六边形的天线中心体空间行架结构及辐射梁、环梁构成天线的主反射体背架结构。40米天线馈电采用后馈卡焦方式,焦长为13.2米。直径4.2米的双曲线副反射体由4根与俯仰轴成450 方向对称布局的支撑柱支撑。是不是很高大上呢?
馈源方向图可以作为激励引入。 大型抛物面天线的FEKO仿真计算 发表时间:2009-8-8 作者: 陈鑫*余川来源: 安世亚太 关键字: FEKO 仿真抛物面天线方向图 本文利用FEKO 软件仿真计算得到了抛物面天线的方向图。在仿真过程中将喇叭馈源生成的方向图做为激励加入, FEKO 软件的这一特点不但提高了计算速度、节约了所需要的系统资源,也为进一步对抛物面天线阵的仿真打下了基础。 1 前言 在电子对抗、跟踪遥测等工程应用领域内,由于抛物面天线具有发射功率大、副瓣较低、结构简单易加工、相关技术较成熟等优点,常常被选做发射天线或者阵列单元。 在频率较高频段,特别是C 波段以上的频段,其波长已经在10 厘米以内,对于直径在一米以上的大型抛物面天线或者天线阵列来说,市面上其他电磁场仿真软件在对于电大天线的仿真计算能力很弱,有些根本无法计算,而FEKO 软件恰恰弥补了这一空白。 本文利用FEKO 软件仿真计算得到了直径为110 厘米的抛物面天线方向图(X 波段),在仿真过程中将喇叭馈源生成的方向图数据文件做为激励加入,抛物面表面采用PO 算法,大大提高了计算效率,节省了所需硬件资源,为进一步对抛物面天线阵的仿真打下了基础。 2 馈源仿真计算 对于传统前馈抛物面的仿真,一般都是将喇叭馈源和抛物面整体建模、整体计算的方法。在计算机硬件资源和时间允许的情况下,其优点是操作简单,直接得出计算结果;但是如果需要计算天线阵列或者更大的抛物面天线,也许对于计算机资源要求就太高,往往无法满足需要。因此,我们首先用SABOR 软件快速设计喇叭几何尺寸,计算喇叭的大致远场方向图和增益(图1)。在FEKO 中用MLFMM 计算该尺寸的喇叭方向图,如图2 所示,计算结果与设计一致,满足下一步计算要求。
一、过程控制仪表认识实验 一、实验目的 1、熟悉装置的具体结构、明确各部件的作用。 2、掌握常用传感器的工作原理及使用方法。 二、实验内容 1、水箱 本装置包括上水箱、中水箱、下水箱和储水箱,上、中、下三个水箱都有三个槽,分别是缓冲槽、工作槽和溢流槽。实验时,水流首先进入缓冲槽(可减小水流对工作槽的冲击),当缓冲槽中注满水时,水流便溢出到工作槽。 整个装置的管道都采用铝塑管,以防止阀门生锈。 打开储水箱后的小球阀可排出水箱中的水,另外还可排出空气,以防抽不上水。 2、微型锅炉、纯滞后系统、热电阻 本装置采用锅炉进行温度实验,锅炉用不锈钢材料制作,共有四层,从内向外依次是加热层、冷却层、溢流层和纯滞后管道层(盘管长达20米)。 热电阻为Pt100,三线制工作。 温度变送器内部已有内置电源,不能再接外加电源。 系统用2Kw的加热丝进行加热,并采用可控硅移相触发模块(移相触发角与输入电流成正比),本模块输入为4—20mA的标准电流,输出为380V的交流电。 3、液位传感器 本装置采用扩散硅压力变送器(不锈钢隔离膜片),标准二线制进行传输,因此工作时需要串接24V电源。 压力变送器通电15分钟后,方可调整零点和量程。使用的原则是:没通电,不加压;先卸压,再断电。 零点调整:在水箱液位为零时,调整输出电流表的读数为4mA。 满量程调整:在水箱加满水时,调整输出电流表的读数为20mA。
调整的原则是:先调零点,再调满量程,要反复多次调整(满量程调整后会影响零点)。 4、电动调节阀 采用德国PS公司生产的PSL 202型智能电动调节阀。调节阀由220V50HZ电源供电。工作环境温度为-20—70摄氏度,输入信号为4—20mA的控制信号,输出信号为4—20mA 的阀位信号。 5、变频器 采用日本三菱FR-S520变频器,内控为0—50HZ,外控为4—20mA,可通过控制屏上的双掷开关进行切换。 内控:上电时,EXT灯先亮,开关打到内控,Run灯亮,开始内控变频控制水泵。 外控:开关打到外控,按PU/EXT键,使EXT灯亮,按Run运行,按Stop停运。 内外控切换时,要注意按键和开关配合使用。 6、水泵 采用丹麦格兰富水泵,扬程高达10米,噪音很低。 7、流量计 流量计由流量传感器和转换器组成。 采用LDS-10S型电磁流量传感器,其流量为0—0.3立方米/秒,压力为1.6Mpa,4—20mA 标准输出,可与显示、记录仪表、积算器配套,避免了涡轮流量计非线性与死区大的缺点。 转换器采用LDZ-4型电磁流量转换器。 它为内置电源。 8、调节器 采用上海万迅公司的AI全通用人工智能调节器。708型为模糊控制器,818型为PID 控制器。 输入为1、2端子,输入为1—5V。 输出为7、8端子,输出为4—20mA。 主要功能是:接受反馈信号Vi,与给定Vs进行比较,得到偏差,并对偏差进行PID连续运算,通过改变PID参数,可改变控制作用。
无线网络WiFi天线原理 1.7.2 高增益栅状抛物面天线 从性能价格比出发,人们常常选用栅状抛物面天线作为直放站施主天线。由于抛物面具有良好的聚焦作用,所以抛物面天线集射能力强,直径为 1.5 m 的栅状抛物面天线,在900兆频段,其增益即可达 G = 20dBi。它特别适用于点对点的通信,例如它常常被选用为直放站的施主天线。 抛物面采用栅状结构,一是为了减轻天线的重量,二是为了减少风的阻力。 抛物面天线一般都能给出不低于 30 dB 的前后比,这也正是直放站系统防自激而对接收天线所提出的必须满足的技术指标。 1.7.3 八木定向天线 八木定向天线,具有增益较高、结构轻巧、架设方便、价格便宜等优点。因此,它特别适用于点对点的通信,例如它是室内分布系统的室外接收天线的首选天线类型。 八木定向天线的单元数越多,其增益越高,通常采用 6 - 12 单元的八木定向天线,其增益可达 10-15dBi。 1.7.4 室内吸顶天线 室内吸顶天线必须具有结构轻巧、外型美观、安装方便等优点。 现今市场上见到的室内吸顶天线,外形花色很多,但其内芯的购造几乎都是一样的。这种吸顶天线的内部结构,虽然尺寸很小,但由于是在天线宽带理论的基础上,借助计算机的辅助设计,以及使用网络分析仪进行调试,所以能很好地满足在非常宽的工作频带内的驻波比要求,按照国家标准,在很宽的频带内工作的天线其驻波比指标为VSWR ≤ 2 。当然,能达到VSWR ≤ 1.5 更好。顺便指出,室内吸顶天线属于低增益天线, 一般为G = 2 dBi。 1.7.5 室内壁挂天线 室内壁挂天线同样必须具有结构轻巧、外型美观、安装方便等优点。 现今市场上见到的室内壁挂天线,外形花色很多,但其内芯的购造几乎也都是一样的。这种壁挂天线的内部结构,属于空气介质型微带天线。由于采用了展宽天线频宽的辅助结构,借助计算机的辅助设计,以及使用网络分析仪进行调试,所以能较好地满足了工作宽频带的要求。顺便指出,室内壁挂天线具有一定的增益,约为G = 7 dBi。 2 电波传播的几个基本概念 目前GSM和CDMA移动通信使用的频段为: GSM:890 - 960 MHz, 1710 - 1880 MHz CDMA: 806 - 896 MHz 806 - 960 MHz 频率范围属超短波范围;1710 ~1880 MHz 频率范围属微波范围。 电波的频率不同,或者说波长不同,其传播特点也不完全相同,甚至很不相同。 2.1 自由空间通信距离方程 设发射功率为PT,发射天线增益为GT,工作频率为f . 接收功率为PR,接收天线增益为GR,收、发天线间距离为R,那么电波在无环境干扰时,传播途中的电波损耗 L0 有以下表达式: L0 (dB) = 10 Lg( PT / PR ) = 32.45 + 20 Lg f ( MHz ) + 20 Lg R ( km ) - GT (dB) - GR (dB) [ 举例] 设:PT = 10 W = 40dBmw ;GR = GT = 7 (dBi) ; f = 1910MHz 问:R = 500 m 时, PR = ? 解答: (1) L0 (dB) 的计算 L0 (dB) = 32.45 + 20 Lg 1910( MHz ) + 20 Lg 0.5 ( km ) - GR (dB) - GT (dB)
第八章 口径天线理论基础 在第七章以前我们讨论的是线状天线,其特点是天线呈直线、折线或曲线状,且天线的尺寸为波长的几分之一或数个波长。所构成的基本理论称之为线天线理论。既使是第七章的开槽缝隙天线,在分析时也是借助了缝隙天线的互补天线—金属线天线来分析。 在实际工作中,还将遇到金属导体构成的口径天线和反射面天线。有时我们统称为口面天线。它们包括:喇叭天线、透镜天线、抛物面天线、双反射面的卡塞格伦天线等。见P169图8-1。它们的尺寸可以是波长的十几到几十倍以上。 口面天线的分析模型如图8-1所示: 图8-1 口面天线的分析模型 S ′为天线金属导体面,为开口面,S S ′+构成一个封闭面,封闭面内有一源。 S 对这样一个分析模型,要求解空间某点p 处的电磁场E P 、H P 。它们可描述为由两部分组成:一部分是源的直达波,一部分是由天线导体面上感应电流产生的散射场。这种分析方法我们称之为面电流法。面电流法对反射面天线有效,它是分析反射面天线的方法之一。但是,面电流法对喇叭天线、波导口天线一类的口径天线无效,或者说处理很难。我们可采用口径场法。 口径场法步骤: 1、解内问题,即由场源求得口面上的场分布; 2、解外问题,即由口面上场分布求解远区辐射场。 由此可见,反射面天线也可用口径场法分析。 喇叭天线一类:口径场法; 反射面天线一类:口经场法,面电流法。(近似方法) 有的反射面天线如抛物环面,由于口径场不易确定,还只得用面电流法。 口径场法和面电流法都是近似的方法,它们只能求出口径面前方半空间的辐射场,口面后方半空间的场无法求得。实际上口面天线的外表面及口径边缘L 上均有感应电流。这部分电流就是对口面天线后向辐射的主要贡献。但通常的做法是采用几何绕射理论,求由边缘L 产生的绕射。 值得说明的是,口面天线的边缘绕射场与前方半空间的场相比是微不足道的。 如果采用口径场法,那么,现在的问题是:能否用口径天线口面上的场分布来确定天线辐射场?回答是肯定的,这就须由惠更斯—菲涅尔原理来说明。
无线网络WIFI天线原理 1 天线 1.1 天线的作用与地位 无线电发射机输出的射频信号功率,通过馈线(电缆)输送到天线,由天线以电磁波形式辐射出去。电磁波到达接收地点后,由天线接下来(仅仅接收很小很小一部分功率),并通过馈线送到无线电接收机。可见,天线是发射和接收电磁波的一个重要的无线电设备,没有天线也就没有无线电通信。天线品种繁多,以供不同频率、不同用途、不同场合、不同要求等不同情况下使用。对于众多品种的天线,进行适当的分类是必要的:按用途分类,可分为通信天线、电视天线、雷达天线等;按工作频段分类,可分为短波天线、超短波天线、微波天线等;按方向性分类,可分为全向天线、定向天线等;按外形分类,可分为线状天线、面状天线等;等等分类。 *电磁波的辐射 导线上有交变电流流动时,就可以发生电磁波的辐射,辐射的能力与导线的长度和形状有关。如图1.1 a 所示,若两导线的距离很近,电场被束缚在两导线之间,因而辐射很微弱;将两导线张开,如图1.1 b 所示,电场就散播在周围空间,因而辐射增强。必须指出,当导线的长度L 远小于波长λ 时,辐射很微弱;导线的长度L 增大到可与波长相比拟时,导线上的电流将大大增加,因而就能形成较强的辐射。
1.2 对称振子 对称振子是一种经典的、迄今为止使用最广泛的天线,单个半波对称振子可简单地单独立地使用或用作为抛物面天线的馈源,也可采用多个半波对称振子组成天线阵。两臂长度相等的振子叫做对称振子。每臂长度为四分之一波长、全长为二分之一波长的振子,称半波对称振子, 见图1.2 a 。另外,还有一种异型半波对称振子,可看成是将全波对称振子折合成一个窄长的矩形框,并把全波对称振子的两个端点相叠,这个窄长的矩形框称为折合振子,注意,折合振子的长度也是为二分之一波长,故称为半波折合振子, 见图1.2 b。
ALERTON楼宇自控实验 一、实验目的 本实验为学生综合课程设计的一部分,在熟悉美国Honeywell楼宇自控系统软硬件的基础上,完成一次回风空调系统楼宇自控系统的初步方案设计,并在ALERTON楼宇自控实验平台上,完成一次回风空调系统楼控系统的软件设计调试。 通过实验,了解楼宇自控系统软硬件系统的构成,掌握建筑设备(特别是空调系统)的控制原理,掌握楼宇自控系统设计的一般方法。 一、实验装置: ALERTON楼宇自控实验平台:ALERTON实验展板为控制系统,并与局域网相连,实验室的每台计算机均为工作站,监控系统的运行状况。 (一)BACtalk楼宇自控系统简介 BACtalk楼宇自控系统是一个“Native BACnet”系统,具备先进性,开放性和标准化特性。是一套先进、可靠和完善的楼宇监控系统,可以收集、记录、保存和管理各系统中重要信息及数据,从而达到自动化管理和节约能源的效果。下面分别对ALERTON/BACtalk的软硬件系统进行介绍。 BACtalk系统网络结构图 1. BACtalk的硬件系统 BACtalk系统采用分布式结构,分散控制,集中管理。它是由管理层、系统集成层、现场控制器层、传感器/执行器层所构成的一种智能化控制网络。 (1)管理层 操作站设置在主控室及其它重要场所,是楼宇自控系统与操作人员的人机界面,由个人电脑、彩色显示器、鼠标、键盘及打印机等组成。操作人员通过互联网浏览器可以进行BACTalk系统操作,存取或更改系统内的资料及设定数据。其中的网络包括以太网和控制器网。 ①以太网:通信协议为BACnet/IP。以太网通讯路由器支持BACnet/IP协议RJ45通讯口及 10Mbyte速度,并连接主控制器网,负责其间路由功能,可和其它路由器及BACtalk Server