第一章:
单向静拉伸试验:是应用最广泛的力学性能试验方法之一。
1)可揭示材料在静载下的力学行为(三种失效形式):即:过量弹性变形、塑性变形、断裂。
2)可标定出材料最基本力学性能指标:如:屈服强度、抗拉强度、伸长率、断面收缩率等。 拉伸力-伸长曲线
拉伸曲线:
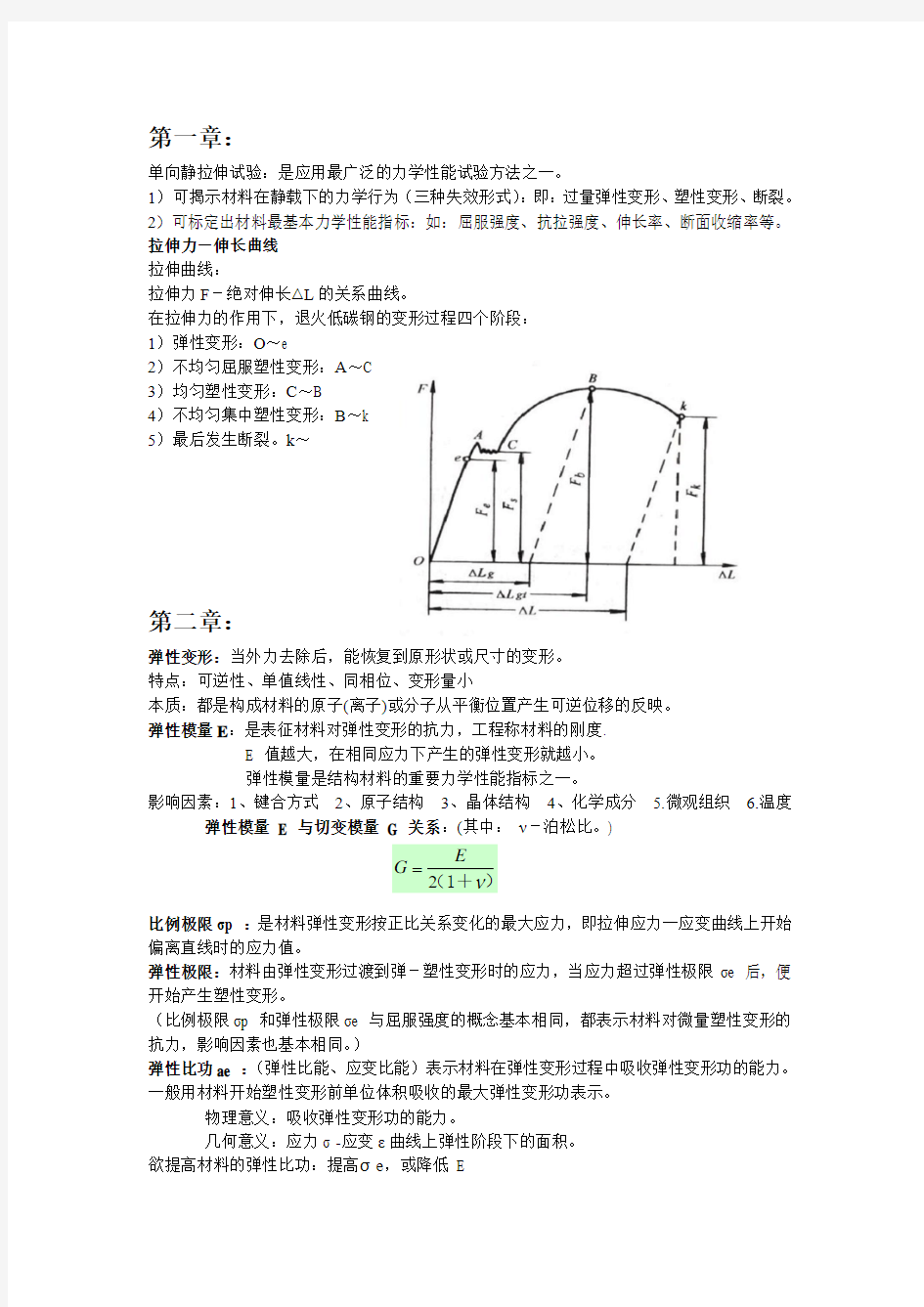
拉伸力F -绝对伸长△L 的关系曲线。
在拉伸力的作用下,退火低碳钢的变形过程四个阶段:
1)弹性变形:O ~e
2)不均匀屈服塑性变形:A ~C
3)均匀塑性变形:C ~B
4)不均匀集中塑性变形:B ~k
5)最后发生断裂。k ~
第二章:
弹性变形:当外力去除后,能恢复到原形状或尺寸的变形。
特点:可逆性、单值线性、同相位、变形量小
本质:都是构成材料的原子(离子)或分子从平衡位置产生可逆位移的反映。 弹性模量E :是表征材料对弹性变形的抗力,工程称材料的刚度.
E 值越大,在相同应力下产生的弹性变形就越小。
弹性模量是结构材料的重要力学性能指标之一。
影响因素:1、键合方式 2、原子结构 3、晶体结构 4、化学成分 5.微观组织 6.温度 弹性模量 E 与切变模量 G 关系:(其中: ν-泊松比。)
比例极限σp :是材料弹性变形按正比关系变化的最大应力,即拉伸应力一应变曲线上开始偏离直线时的应力值。
弹性极限:材料由弹性变形过渡到弹-塑性变形时的应力,当应力超过弹性极限σe 后,便开始产生塑性变形。
(比例极限σp 和弹性极限σe 与屈服强度的概念基本相同,都表示材料对微量塑性变形的抗力,影响因素也基本相同。)
弹性比功ae :(弹性比能、应变比能)表示材料在弹性变形过程中吸收弹性变形功的能力。一般用材料开始塑性变形前单位体积吸收的最大弹性变形功表示。
物理意义:吸收弹性变形功的能力。
几何意义:应力σ -应变ε曲线上弹性阶段下的面积。
欲提高材料的弹性比功:提高σe ,或降低
E
2E G ν=(1+)
弹簧钢:含碳较高并添加Si 、Mn 等合金元素强化基体,经淬火+中温回火获得回火托氏体组织及冷变形强化,以提高其弹性极限,使弹性比功ae 和弹性提高。
纯弹性体的弹性变形:只与载荷大小有关,而与加载方向和加载时间无关。
材料的非理想弹性行为:可分为滞弹性、粘弹性、伪弹性及包申格效应等几种类型。
滞弹性:是指材料在弹性范围内快速加载或卸载后,随时间的延长而产生的附加弹性应变的现象。
金属的循环韧性:金属材料在交变载荷(振动)下吸收不可逆变形功的能力
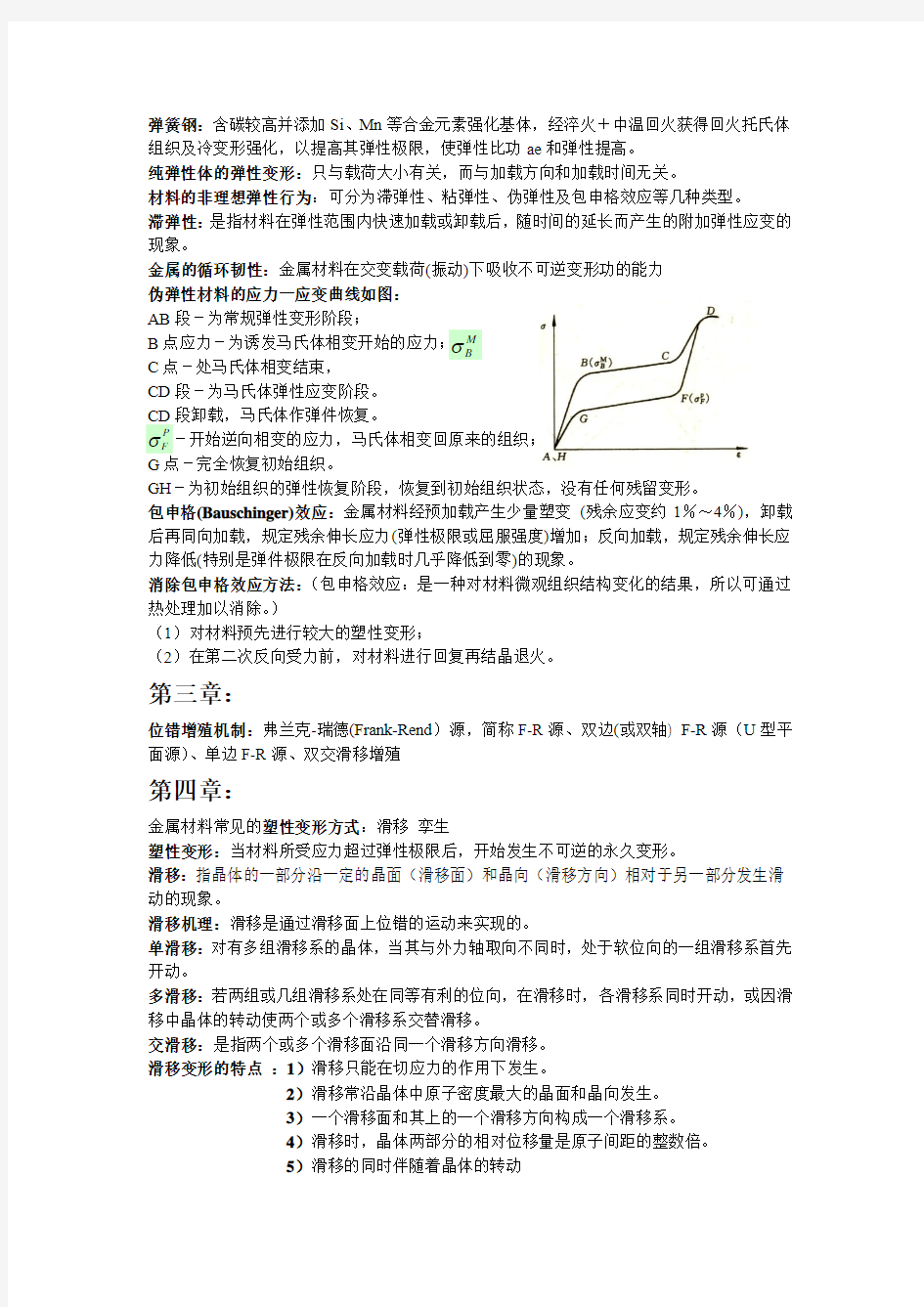
伪弹性材料的应力一应变曲线如图:
AB 段-为常规弹性变形阶段;
B 点应力-为诱发马氏体相变开始的应力;
C 点-处马氏体相变结束,
CD 段-为马氏体弹性应变阶段。
CD 段卸载,马氏体作弹件恢复。
-开始逆向相变的应力,马氏体相变回原来的组织;
G 点-完全恢复初始组织。
GH -为初始组织的弹性恢复阶段,恢复到初始组织状态,没有任何残留变形。
包申格(Bauschinger)效应:金属材料经预加载产生少量塑变 (残余应变约1%~4%),卸载后再同向加载,规定残余伸长应力(弹性极限或屈服强度)增加;反向加载,规定残余伸长应力降低(特别是弹件极限在反向加载时几乎降低到零)的现象。
消除包申格效应方法:(包申格效应:是一种对材料微观组织结构变化的结果,所以可通过热处理加以消除。)
(1)对材料预先进行较大的塑性变形;
(2)在第二次反向受力前,对材料进行回复再结晶退火。
第三章:
位错增殖机制:弗兰克-瑞德(Frank-Rend )源,简称F-R 源、双边(或双轴) F-R 源(U 型平面源)、单边F-R 源、双交滑移增殖
第四章:
金属材料常见的塑性变形方式:滑移 孪生
塑性变形:当材料所受应力超过弹性极限后,开始发生不可逆的永久变形。
滑移:指晶体的一部分沿一定的晶面(滑移面)和晶向(滑移方向)相对于另一部分发生滑动的现象。
滑移机理:滑移是通过滑移面上位错的运动来实现的。
单滑移:对有多组滑移系的晶体,当其与外力轴取向不同时,处于软位向的一组滑移系首先开动。
多滑移:若两组或几组滑移系处在同等有利的位向,在滑移时,各滑移系同时开动,或因滑移中晶体的转动使两个或多个滑移系交替滑移。
交滑移:是指两个或多个滑移面沿同一个滑移方向滑移。
滑移变形的特点 :1)滑移只能在切应力的作用下发生。
2)滑移常沿晶体中原子密度最大的晶面和晶向发生。
3)一个滑移面和其上的一个滑移方向构成一个滑移系。
4)滑移时,晶体两部分的相对位移量是原子间距的整数倍。
5)滑移的同时伴随着晶体的转动
M B σP F σ
孪生:在切应力作用下,晶体的一部分沿一定晶面和晶向相对于另一部分所发生的均匀切变。此切变并未使晶体点阵发生变化,但却使切变区晶体取向与未切变区晶体呈镜面对称。
孪生变形特点:1)孪生也是在切应力作用下发生的
2)孪生使一部分晶体发生均匀切变
3)孪生使晶体变形部分位向发生改变,孪晶面两侧晶体位向呈镜面对称
4)孪生时相邻原子面的相对位移量小于一个原子间距
5)孪生对塑变的直接贡献比滑移小很多
6)孪生变形的拉伸应力-应变曲线呈锯齿状
7)孪生变形与晶体结构
8)孪生使表面出现浮凸
晶界及晶粒位向差的影响:1、晶界的影响:双晶在室温下拉伸变形后,呈现竹节状。即晶界处晶体变形较小,而晶内变形量则大得多,整个晶粒的变形不均匀。这表明:晶界强度高于晶内。晶界对塑性变形的影响:晶体在外力作用下变形,当滑移的位错运动到晶界附近时,受到阻碍而堆积,称位错塞积。要使变形继续进行, 须增加外力, 而使金属变形抗力提高。
2、晶粒位向的影响:因各相邻晶粒位向不同,当一晶粒发生塑变时,为保持金属的连续性,周围晶粒若不发生塑变,则必以弹性变形来与之协调。这便成为塑性变形晶粒的变形阻力。因各晶粒间的相互约束,使多晶体金属的变形抗力提高。
多晶体金属塑性变形特点:1)各晶粒变形不同时性:当多晶体受外力作用时,因各晶粒取向不同,软取向晶粒先滑移变形,而硬取向晶粒可能仍处于弹性变形状态。只有外力继续增大,才能使滑移从某些晶粒传播到相邻晶粒,并不断传播下去,从而产生宏观可见的塑性变形。
2)各晶粒的变形不均匀:多晶体各晶粒变形不同时性,也反映了各晶粒变形不均匀。变形不均匀性:不仅存在于各晶粒间、基体与第二相间,也存在于同一晶粒内部。因晶界对滑移的阻碍作用,使得靠近晶界区域的滑移变形量明显小于晶粒中心区域。当宏观塑变量还不大时,个别晶粒或晶粒局部塑变量可能已达极限,加上变形不均匀产生较大内应力,就有可能使这些晶粒中形成裂纹,导致金属材料早期断裂。
3)各晶粒变形的相互协调:多晶体作为一个整体,不允许各个晶粒任意自由变形,否则将造成晶界开裂,这就要求各晶粒间能协调变形。为此,各晶粒须能同时沿几个滑移系进行滑移(多滑移)。一般认为,各晶粒至少应有5个独立滑移系启动,才能确保产生任何方向不受约束的塑性变形,即其形状才能相应地作各种改变,而不引起晶界开裂。
细晶强韧化:通过细化晶粒来同时提高金属的强度、塑性和韧性的方法
屈服:金属材料在拉伸时,当应力超过弹性极限,即使外力不再增加,甚至下降情况下,而变形继续进行的现象
应变时效现象:若将低碳钢经少量预变形,去载后立即加载,则暂不出现屈服现象。但若预变形后,将试样放置一段时间或稍微加热(200℃)后再加载拉伸,则又出现屈服现象,且屈服强度会有所提高
屈服的解释:一般认为,在固溶体中溶质或杂质原子造成点阵畸变所产生应力场和位错应力场发生交互作用,使溶质原子将聚集在位错线附近,形成所谓的柯垂尔(Cottrell)气团。因此交互作用,使体系能量处于较低状态;只有在较大应力作用下,位错才能脱离溶质原子的钉扎;表现为应力-应变曲线上的上屈服点;当位错继续滑移时,就不需要开始时那么大的应力,表现为应力-应变曲线上的下屈服点;当继续变形时,因应变硬化作用,应力又出现升高的现象。
应变时效解释:1)当卸载后,短时间内因位错已经挣脱溶质原子束缚,故继续加载时不会出现屈服现象。2)当卸载后经较长时间或短时加热,溶质原子又会扩散重新聚集到位错线附近,故继续拉伸,又会出现屈服现象。
影响金属材料屈服强度的因素:
1)内因
1.金属本性及晶格类型
(1)位错运动所受的各种阻力①晶格阻力(P-N力)②位错间交互产生的阻力
2.晶粒大小和亚结构
3.溶质元素
4.第二相
2)外因
5.温度
6.应变速率与应力状态。
弥散强化:当第二相以弥散分布形式存在时,将产生显著的强化作用,若借助粉末冶金或其它方法加入,则为弥散强化。
第二相颗粒可分为“可变形的”和“不可变形的”
1)弥散强化的颗粒属不可变形的;
2)沉淀强化的颗粒多属可变形,但当沉淀粒子长大到一定程度后,也会变为不可变形的。单相固溶体合金:随溶质含量增加,固溶体强度、硬度提高,塑性、韧性下降,称固溶强化。弥散强化机理:当运动位错与不可变形颗粒相遇时,位错线因受阻挡而发生弯曲;随着应力增加,弯曲加剧,最终绕颗粒的位错相遇,并留下一个位错环,而位错线将继续前进。显然,此过程需额外做功,且位错环将对后续位错产生进一步阻碍作用,这都将使材料强度的上升。当第二相在晶内呈颗粒状弥散分布时,颗粒越细,分布越均匀,合金的强度、硬度越高,塑性、韧性略有下降,这种强化方法称弥散强化或沉淀强化。
应变硬化指数n :反映了材料抵抗继续塑性变形的能力。也是表征材料应变硬化行为的性能指标。
应变硬化指数n 对材料结构、组份与状态变化敏感。应变硬化指数n 也与层错能有关,层错能低的材料应变硬化程度大。
第五章:
机件的三种主要失效形式:磨损、腐蚀、断裂。
断裂:又可分为完全断裂和不完全断裂。
断裂的类型:断裂过程大都包括裂纹的形成与扩展两个阶段。按照不同的分类方法,将断裂分为以下几种:
1)按宏观塑性变形程度:韧性断裂、脆性断裂。
2)按裂纹扩展途径:穿晶断裂、沿晶断裂。
3)按断裂机理:纯剪切断裂、微孔聚集型、解理断裂。
4)按断裂面取向分类:正断;切断。
韧性断裂:材料断裂前及断裂过程中产生明显宏观塑性变形的断裂。
特点:1)断裂有一个缓慢撕裂过程,且消耗大量塑性变形能。
2)断裂面一般平行于最大切应力并与主应力成45°角。
3)断口呈纤维状,灰暗色。
4)典型宏观断口特征呈杯锥状。
杯锥状断口:有纤维区、放射区、剪切唇(断口三要素)。
脆性断裂:材料断裂前基本不产生明显宏观塑性变形,无明显预兆,表现为突然发生的快速断裂,故有很大危险性。
特点:1)断裂面一般与正应力垂直,断口平齐而光亮,常呈放射状或结晶状。
2)矩形截面板状试样脆性断口可见“人字纹花样”。
3)人字纹放射方向与裂纹扩展方向平行,其尖顶指向裂纹源。
微孔聚集型断裂:(纯剪切断裂另一种形式)通过微孔形核、长大聚合而导致材料分离,是韧性断裂的普遍方式。
宏观断口:常呈现暗灰色、纤维状,
微观断口特征:则是断口上分布大量“韧窝”。
微孔聚集型断裂断口微观特征:韧窝
韧性断裂主要过程:微孔形核长大和聚合。在断口上留下痕迹即为电镜下观察到的大小不等的圆形或椭圆形韧窝。
韧窝-是韧性断裂的微观基本特征。
解理断裂:金属材料在一定条件(如低温、高应变速率,或有三向拉应力状态)下,当外加正应力达到一定数值后,以极快速率沿一定晶体学平面(解理面)产生的穿晶断裂。解理常见于:体心立方(bcc)和密排六方(hcp)金属中。
解理面:一般是低指数面或表面能最低的晶面。
解理裂纹的形成和扩展:裂纹形成必与塑性变形有关,而塑变又是位错运动的反映。因此,裂纹形成与位错运动有关-提出裂纹形成位错理论。
解理断裂:是沿晶体特定界面发生的脆性穿晶断裂。
基本微观特征:解理台阶、河流花样、舌状花样。
微观断口:由许多大致相当于晶粒大小的解理(刻)面集合而成的。
解理台阶和河流花样:
在解理刻面内部,解理裂纹一般要跨越若干相互平行且位于不同高度的解理面,而出现解理台阶和河流花样。
河流花样:实际上是解理台阶的一种标志。
解理台阶、河流花样、舌状花样是解理断裂基本微观特征。
准解理断裂:
常见于淬火+回火的高强度钢,或贝氏体组织钢中。因弥散细小碳化物质点影响了裂纹形成与扩展,当裂纹在晶粒内扩展时,难于严格沿一定晶体学平面扩展。
断裂路径:不再与晶粒位向有关,而主要与细小碳化物有关。
微观特征:似解理河流但又非真正解理,故称准解理。
第六章:
应力腐蚀断裂(SCC):金属构件在静载拉应力和特定化学介质共同作用下,经过一段时间后,因电化学腐蚀所导致的正常延性材料发生早期低应力脆性延迟破坏现象
应力腐蚀断裂:并不是应力作用下的机械性破坏与化学介质作用下的腐蚀性破坏的简单迭加所致。而是在两者联合作用下,按特有机理产生的断裂。其断裂强度比单因素分别作用后再迭加的还要低得多。
应力腐蚀断裂产生条件:应力、化学介质、金属材料
应力腐蚀断裂机理:是滑移-溶解理论(或称钝化膜破坏理论)和氢脆理论。
氢致延滞断裂:在高强度钢或其他材料(如α+β钛合金)中固溶有适量的氢(原来存在或从环境介质中吸收),在低于屈服强度的应力持续作用下,经过一段时间(孕育)后,在金属内部,特别在三向拉应力区形成裂纹,裂纹逐步扩展,最后突然发生脆性断裂。这种因氢的作用而产生的延迟断裂称为“氢致延迟断裂”。工程上所说“氢脆”:大多数是指这类氢脆。氢脆断口宏观特征:具有脆性断裂特征。断口面平齐而光亮,呈放射状或颗粒状。
氢脆断口微观特征:①沿晶断裂:大多沿原奥氏体晶界的沿晶断裂,晶界面上较平坦,且
无附着物,并有二次裂纹。②随氢脆类型、H含量、材料成分、晶粒度、应力大小、应变速度等不同而变化;
除沿晶外,还有穿晶断裂(微孔型、解理、准解理型)。
第七章:
疲劳:金属机件或构件在变动应力和应变长期作用下由于累积损伤而引起的断裂现象
疲劳分类:
1)按应力状态:弯曲疲劳、扭转疲劳、拉压疲劳及复合疲劳;
2)按环境和接触:大气疲劳、腐蚀疲劳、高温疲劳、热疲劳、接触疲劳等;
3)按断裂寿命和应力高低:高周疲劳和低周疲劳,这是最基本的分类方法。
高周疲劳:断裂应力水平较低,σ<σs ,断裂寿命较长,Nf >105周次。也称低应力疲劳,一般疲劳多属这类。
低周疲劳:断裂应力水平较高,σ>σs,断裂寿命较短,Nf =(102~105)用次,往往有塑性应变,也称高应力疲劳或应变疲劳。
疲劳的特点
(1)疲劳是低应力循环延时断裂,即具有寿命的,
(2)疲劳是脆性断裂
(3)疲劳对缺陷(缺口、裂纹及组织缺陷)十分敏感
疲劳断口:保留了断裂过程的很多信息,有明显形貌特征。并受材料性质、应力状态、大小及环境等因素的影响,
疲劳断口分析是研究疲劳断裂过程和原因的重要方法之一。
典型断口:有三个不同区域——疲劳源、疲劳区及瞬断区
(1)疲劳源:是疲劳裂纹萌生的策源地。
(2)疲劳区:疲劳裂纹亚稳扩展区,是判断疲劳断裂的重要证据。
(3)瞬断区:裂纹最后失稳快速扩展区。
疲劳过程:包括疲劳裂纹萌生、裂纹亚稳扩展及最后失稳扩展三个阶段
机理:宏观疲劳裂纹是由微观裂纹的形成、长大从连接而成的。
疲劳条带是疲劳断口微观特征,贝纹线是断口的宏观特征。
疲劳裂纹扩展第二阶段是在应力循环下,裂纹尖端钝锐反复交替变化的过程。
应力集中:机件表面缺口应力集中,常是引起疲劳破坏的主要原因。
残余应力及表面强化的影响
残余应力状态对疲劳强度(高周疲劳)有显著影响:残余压应力提高疲劳强度;残余拉应力则降低疲劳强度。
残余压应力的有利影响与外加应力的应力状态有关:a)弯曲疲劳时,残余压应力的效果比扭转疲劳大;b)拉压疲劳时,影响较小。
残余压应力:可有效降低缺口根部的拉应力峰值,显著提高机件的疲劳强度。
当然,还和残余压应力值大小、深度及分布,以及在疲劳过程中是否会发生松弛等因素有关。表面强化方式:通常有表面喷丸、滚压、表面淬火及表面化学热处理等。
表面热处理及化学热处理
表面淬火:有火焰淬火、感应淬火和低淬透性钢的整体加热薄壳淬火等。
表面化学热处理:有渗C、渗N及C-N共渗等。
都是利用组织相变,获得表面强化的常用的工艺方法。
表面强化方法:能使机件获得表硬心韧的综合力学件能,还可利用表面组织相变及组织应力、热应力变化,使机件表面层获得高强度和残余压应力。在有效提高机件疲劳强度和疲劳寿命
同时,还能提高表面耐磨性和耐蚀性。
冶金及其加工缺陷:
钢材在冶炼和轧制生产中还有气孔、缩孔、偏折、白点、折叠等冶金加工缺陷;零件在铸造、锻造、焊接及热处理中也会有缩孔、裂纹、过烧及过热等缺陷。这些缺陷常是疲劳裂纹的发源地,严重地降低疲劳强度。钢材在轧制和锻造时,因夹杂物沿压延方向分布而形成流线,流线纵向的疲劳强度高,横向的疲劳强度低。
第八章:
蠕变:指金属在长时间恒温、恒载荷作用下缓慢地产生塑性变形的现象。
蠕变断裂:由于蠕变而最后导致金属材料的断裂。
按蠕变速率变化情况,蠕变过程分为三个阶段。
(1)减速蠕变阶段
(2)恒速蠕变阶段
(3)加速蠕变阶段
金属蠕变:主要是通过位错滑移、原子扩散等机理进行的,且随温度及应力的变化而有所不同。
位错滑移蠕变(在蠕变过程中,位错滑移仍然是一种重要的变形机理)
在常温下,若滑移面上位错运动受阻产生塞积,滑移便不能继续进行。需更大切应力作用才能使位错重新运动和增殖。在高温下,位错可惜助外界提供的热激活能和空位扩散来克服某些短程障碍,从而使变形不断产生。
位错热激活方式:有多种,高温下主要是刃位错的攀移。
刃位错攀移克服障碍的几种模型:塞积在某障碍前的位错
a)通过热激活,可越过固定位错与弥散质点,在新的滑移面上运动;
b)与临近滑移面上的异号位错相遇,而对消;
c)形成亚晶界;
d)被晶界所吸收。
扩散蠕变:是在较高温度(约比温度(T/Tm)远超过0.5)下的一种蠕变变形机理。它是在高温下大量原子和空位定向移动造成的。
晶界滑动:另外,在高温条件下,由于晶界上的原子容易扩散,受力后晶界易产生滑动,也促进蠕变进行。但晶界滑动对蠕变的贡献并不大,一般为10%左右。不是独立的蠕变机理。因为晶界滑动一定要和晶内滑移变形配合进行,否则就不能维持晶界的连续性,会导致晶界上产生裂纹。
蠕变断裂机理
金属材料在长时高温载荷作用下的断裂,大多为沿晶断裂。
一般认为,这是由于晶界滑动在晶界上形成裂纹并逐渐扩展而引起的。
第2章 金属塑性变形的物性方程 物性方程又称本构方程,是εσ-关系的数学表达形式。弹性变形阶段有广义Hooke 定律,而塑性变形则较为复杂。在单向受力状态下,可由实验测定εσ-曲线来确定塑性本构关系。但在复杂受力情况下实验测定困难,因此只能在一定的实验结果基础上,通过假设、推理,建立塑性本构方程。为了建立塑性本构方程,首先需弄清楚塑性变形的开始条件——屈服,以及进入塑性变形后的加载路径等问题。 §2.1 金属塑性变形过程和力学特点 2.1.1 变形过程与特点 以单向拉伸为例说明塑性变形过程与特 点,如图2-1所示。金属变形分为弹性、均匀 塑性变形、破裂三个阶段。塑性力学视s σ为 弹塑性变形的分界点。当s σσ<时, σ与ε存在统一的关系,即εσE =。 当s σσ≥以后,变形视作塑性阶段。 εσ-是非线性关系。当应力达到b σ之后, 变形转为不均匀塑性变形,呈不稳定状态。 b σ点的力学条件为0d =σ或d P =0。经短暂的不 稳定变形,试样以断裂告终。 若在均匀塑性变形阶段出现卸载现象,一 部分变形得以恢复,另一部分则成为永久变形。卸载阶段εσ-呈线性关系。这说明了塑性变形时,弹性变形依然存在。弹塑性共存与加载卸载过程不同的εσ-关系是塑性变形的两个基本特征。 由于加载、卸载规律不同,导致εσ-关系不唯一。只有知道变形历史,才能得到一一对应的εσ-关系,即塑性变形与变形历史或路径有关。这是第3个重要特征。 事实上,s σσ>以后的点都可以看成是重新加载时的屈服点。以g 点为例,若卸载则εσ-关系为弹性。卸载后再加载,只要g σσ<点,εσ-关系仍为弹性。一旦超过g 点,εσ-呈非线性关系,即g 点也是弹塑性变形的交界点,视作继续屈服点。一般有s g σσ>,这一现象为硬化或强化,是塑性变形的第4个显著特点。 在简单压缩下,忽略摩擦影响,得到的压缩s σ与拉伸s σ基本相同。但是若将拉伸屈服后的试样经卸载并反向加载至屈服,反向屈服一般低于初始屈服。同理,先压后拉也有类似现象。这种正向变形强化导致后继反向变形软化的现象称作Bauschinger 效应。这是金属微观组织变化所致。一般塑性理论分析不考虑Bauschinger 效应。 Bridgman 等人在不同的静水压力容器中做单向拉伸试验。结果表明:静水压力只引起物体的体积弹性变形,在静水压力不很大的情况下(与屈服极限同数量级)所得拉伸曲线图2-1 应力应变曲线
一、弹性和塑性的概念 可变形固体在外力作用下将发生变形。根据变形的特点,固体在受力过程中的力学行为可分为两个明显不同的阶段:当外力小于某一限值(通常称之为弹性极限荷载)时,在引起变形的外力卸除后,固体能完全恢复原来的形状,这种能恢复的变形称为弹性变形,固体只产生弹性变形的阶段称为弹性阶段;当外力一旦超过弹性极限荷载时,这时再卸除荷载,固体也不能恢复原状,其中有一部分不能消失的变形被保留下来,这种保留下来的永久变形就称为塑性变形,这一阶段称为塑性阶段。 根据上述固体受力变形的特点,所谓弹性,就定义为固体在去掉外力后恢复原来形状的性质;而所谓塑性,则定义为在去掉外力后不能恢复原来形状的性质。“弹性(Elastici ty)”和“塑性(Plasticity)”是可变形固体的基本属性,两者的主要区别在于以下两个方面: 1)变形是否可恢复 .......:弹性变形是可以完全恢复的,即弹性变形过程是一个可逆的过程;塑性变形则是不可恢复的,塑性变形过程是一个不可逆的过程。 2)应力和应变之间是否一一对应 .............:在弹性阶段,应力和应变之间存在一一对应的单值函数关系,而且通常还假设是线性关系;在塑性阶段,应力和应变之间通常不存在一一对应的关系,而且是非线性关系(这种非线性称为物理非线性)。 工程中,常把脆性和韧性也作为一对概念来讲,它们之间的区别在于固体破坏时的变形大小,若变形很小就破坏,这种性质称为脆性;能够经受很大变形才破坏的,称为韧性或延性。通常,脆性固体的塑性变形能力差,而韧性固体的塑性变形能力强。 二、弹塑性力学的研究对象及其简化模型 弹塑性力学是固体力学的一个分支学科,它由弹性理论和塑性理论组成。弹性理论研究理想弹性体在弹性阶段的力学问题,塑性理论研究经过抽象处理后的可变形固体在塑性阶段的力
塑性变形的力学基础 录入: 151dreamhow 来源: 日期: 2008-2-6,10:14 金属成形时,外力通过模具或其它工具作用在坯料上,使其内部产生应力,并且发生塑性变形。由于外力的作用状况坯料的尺寸与模具的形状千差万别,从而引起材料内各点的应力与应变也各不相同。因此必须研究变形体内各点的应力状态、应变状态以及产生塑性变形时各应力之间的关系与应力应变之间的关系。 一、点的应力与应变状态 在变形物体上任意点取一个微量六面单元体,该单元体上的应力状态可取其相互垂直表面上的应力来表示,沿坐标方向可将这些应力分解为九个应力分量,其中包括三个正应力和六个剪应力,如图 1a 所示。相互垂直平面上的剪应力互等,t xy=t yx,t yz=t zy,t zx=t xz。因此若已知三个正应力和三个剪应力,那么该点的应力状态就可以确定了。改变坐标方位,这六个应力分量的大小也跟着改变。对任何一种应力状态,总是存在这样一组坐标系,使得单元体各表面上只有正应力而无剪应力,如图 1b 所示。这三个坐标轴就称应力主轴,三个坐标轴的方向称主方向,这三个正应力就称为主应力,三个主应力的作用面称为主平面。 图1 点的应力状态 a)任意坐标系b)主轴坐标系 三个主方向上都有应力存在称为三向应力状态,如宽板弯曲变形。但板料大多数成形工序,沿料厚方向的应力s t与其它两个互相垂直方向的主应力(如径向应力s r与切向应力s q)相比较,往往很小,可以忽略不计,如拉深、翻孔和胀形变形等,这种应力状态称为平面应力状态。三个主应力中只有一个有值,称为单向应力状态,如板料的内孔边缘和外形边缘处常常是自由表面,s r、s t为零。 除主平面不存在剪应力之外,单元体其它方向上均存在剪应力,而在与主平面成45°截面上的剪应力达到极值时,称为主剪应力。s1≥s2≥s3时,最大剪应力为t =±(s1一s3)/2,最大剪应力与材料的塑性变形关系很大。 max 应力产生应变,应变也具有与应力相同的表现形式。单元体上的应变也有正应变与剪应变,当采用主轴坐标时,单元体六个面上只有三个主应变分量e1、e2和 e ,而没有剪应变分量。塑性变形时物体主要是发生形状的改变,体积变化很小,3 可忽略不计,即: e +e2+e3=0 (1) 1 此即为塑性变形体积不变定律。它反映了三个主应变值之间的相互关系。根据体积不变定律可知:塑性变形时只可能有三向应变状态和平面应变状态,而不可能有单向应变状态。在平面应变状态时若 e2=0 ,另外两个应变的绝对值必然相等,而符号相反。 二、屈服准则(塑性条件) 当物体受单向应力作用时,只要其主应力达到材料的屈服极限,该点就进入塑性状态。而对于复杂的三向应力状态,就不能仅根据某一个应力分量来判断该点是
金属塑性变形与断裂集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
金属材料塑性变形与断裂的关系 摘要:金属的断裂是指金属材料在变形超过其塑性极限而呈现完全分开的状态。材料受力时,原子相对位置发生了改变,当局部变形量超过一定限度时,原于间结合力遭受破坏,使其出现了裂纹,裂纹经过扩展而使金属断开。任何断裂都是由裂纹形成和裂纹扩展两个过程组成的,而裂纹形成则是塑性变形的结果。金属塑性的好坏表明了它抑制断裂能力的高低。 关键词:塑性变形解理断裂准解理断裂沿晶断裂冷脆疲劳应力腐蚀 氢脆高温断裂 一、解理断裂与塑变的关系 解理断裂在主应力作用下,材料由于原子键的破断而产生的沿着某一晶面的快速破断过程。解理断裂的的产生条件是位错滑移必须遇到阻力,且位错滑移聚集到一定程度。断裂面沿一定的晶面发生,这个平面叫做解理面。解理台阶是沿两个高度不同的平行解理面上扩展的解理裂纹相交时形成的。形成过程有两种方式:通过解理裂纹与螺型位错相交形成;通过二次解理或撕裂形成。 第一种,当解理裂纹与螺型位错相遇时,便形成一个台阶,裂纹继续向前扩展,与许多螺型位错相交便形成众多台阶,他们沿裂纹前端滑动而相互交汇,同号台阶相互汇合长大,异号台阶相互抵消,当汇合台阶足够大的时候便在电镜下观察为河流状花样。
第二种,二次解理是指在解理裂纹扩展的两个互相平行解理面间距较小时产生的,但若解理裂纹的上下两个面间距远大于一个原子间距时,两解理裂纹之间的金属会产生较大的塑性变形,结果由于塑性撕裂而形成台阶,称为撕裂棱晶界。舌状花样是由于解理裂纹沿孪晶界扩散留下的舌头状凹坑或凸台。 从宏观上看,解理断裂没有塑性变形,但从微观上看解理裂纹是以塑性变形为先导的,尽管变形量很小。解理断裂是塑性变形严重受阻,应力集中非常严重的一种断裂。 二、准解理断裂与塑变的关系 准解理断裂介于解理断裂和韧窝断裂之间,它是两种机制的混合。产生原因: (1)、从材料方面考虑,必为淬火加低温回火的组织,回火温度低,易产生此类断裂。 (2)、构件的工作温度与钢材的脆性转折温度基本相同。 (3)、构件的薄弱环节处处于平面应变状态。 (4)、材料的尺寸比较粗大。 (5)、回火马氏体组织的缺陷,如碳化物在回火时的定向析出。 准解理断裂往往开始是因为碳化物,析出物或者夹杂物在外力作用下产生裂纹,然后沿某一晶面解理扩展,之后以塑性变形方式撕裂,其断裂面上显现有较大的塑性变形,特征是断口上存在由于几个地方的小裂纹分别扩展相遇发生塑性撕裂而形成的撕裂岭。准解理断裂面不是一
名词解释 (1)加工硬化(变形强化):当金属外加应力超过屈服强度后,随着变形程度的增加,变形的抗力也增加,要继续变形,必须增加外力,这种现象就叫加工硬化。 (2)颈缩:当应力达到抗拉强度时,试样不在均匀伸长,而是试样局部地方截面开始变细。 (3)位错宽度: (4)孪晶变形:晶体在切应力作用下沿着一定的晶面和晶向,在一个区域内发生连续顺序的切变,变形导致这部分的晶体取向改变了。 (5)多滑移:在多个滑移系上同时或交替进行的滑移。 (6)交滑移:晶体在两个或者多个滑移面上沿同一滑移方向进行的滑移。 (7)发生多系滑移时,在两个相交滑移面上运动的位错必然会互相交截,原来一直线位错经过交截后就会出现弯折部分,如果弯折部分仍在滑移面上,就叫扭折,若弯折部分不再滑移面上,就叫割阶。 (8)派纳力:在理想晶体中位错在点阵周期场中运动时所需克服的阻力 (9)纤维组织:金属经过冷变形后,等轴状晶粒沿受力方向拉长,其中的夹杂物或者第二相也随之拉长。 (10)形变织构:金属在形变时,晶体的滑移面会移动,使滑移层逐渐转向与拉力轴平行。 原来的各个晶粒是任意取向的,现在由于晶粒的转动使各个晶粒的取向趋于一致,这就形成了晶体的择优取向。 (11)回复:在加热温度较低时,由于金属中的点缺陷及位错近距离迁移而引起的晶体某些变化。 (12)再结晶:冷变形金属由拉长的变形晶粒生成无畸变的新的等轴晶粒的过程。(13)二次再结晶: (14)热变形:金属在再结晶温度以上的加工变形。 (15)蠕变:材料在高温下的变形不仅与应力有关,而且和应力作用的时间有关。(16)应变时效:低碳钢经过少量预变形后,如果去载后立即再行加载则不会出现明显的屈服平台;若在室温下放置一较长的时间或在低温下经过短时加热后在进行拉伸试验,则屈服点又复出现,且屈服应力提高。 (17)第二相强化:当第二相以细小弥散的微粒均匀分布于基体相中时,将会产生显著的强化作用。 (18)固溶强化:合金在形成单向固溶体后,变形时的临界切应力都高于纯金属,这叫做固溶强化。 (19)再结晶后晶粒的大小由变形度和退火温度决定。 (20)回复和再结晶的驱动力是弹性畸变能,晶粒长大的驱动力是自身界面能。 填空 (1)位错宽度越窄,界面能越小,弹性畸变能越高,位错运动需克服的能垒越大,位错越难运动,派纳力越大。 (2)位错宽度主要取决于结合键的本性和晶体结构。 (3)位错只有沿着原子排列最紧密的面及原子密排方向上运动,派纳力才最小。面心立方金属和沿几何面(0001)滑移的密排六方金属,派纳力最小。 (4)最容易发生交滑移的是体心立方结构。 (5)任意两种类型位错相互交割时,只要形成割阶,一定为刃型割阶,割阶的大小和方向取决于穿过位错的柏氏矢量。 (6)固溶强化,两者原子的尺寸差别越大,溶解度越小,强化效果越大。
杆件的塑性变形 15.1 概 述 工程问题中绝大部分构件必须在弹性范围内工作,不允许出现塑性变形。但有些问题确须考虑塑性变形。 15.2 金属材料的塑性性质 图15.1是低碳钢拉伸的应力-应变曲线。过屈服极限后,应力和应变的关系是非线性的有 p e εεε+= (15.1) 弹性范围内,应力和应变之间是单值对应的。塑性阶段却并非如此,应力和应变不再是单值对应的关系(如图15.2)。 下面是几种常见的塑性材料模型。 图 15.1 低碳钢拉伸的应力-应变曲线 图15.2 弹塑性应力-应变
有时也把应力-应变关系近似地表为幂函数,幂强化材料的应力-应变关系曲线如图15.7所示。 n εσc = 15.3 拉伸和压缩杆系的塑性分析 现以图15.8所示两端固定的杆件为例来说明静不定拉压杆系的塑性分析,当载荷P 逐渐增加时,杆件两端的反力是 b a Pa R b a Pb R += ' += 21 (a) P 力作用点的位移是 ()b a EA Pab EA a R += =1δ (b) 如a b >则21R R >。随着P 的增加, AC 段 图15.8 两端固支杆 图15.3 理想弹塑性材料模型 图15.4刚塑性材料模型 图15.6刚塑性线性强化材料模型 图15.5线性强化材料模型 图15.7幂强化材料模型
的应力将首先达到屈服极限。若相应的载荷 为1P ,载荷作用点的位移为1δ,由(a )、(b ) 两式求得 () b b a A P A b a b P R += =+= s 1, S 111σσ E a s 1σδ= 由平衡方程可知 S 2σA P R -= (c) 载荷作用点c 的位移为 ()EA b P P 11-+ =δδ (d) CB 段也进入塑性阶段时,S 2σA R =,由(c )式求出相应的载荷为 S 22σA P = 载荷达到2P 后,整个杆件都已进入塑性变形。 例18.1 在图15.9a 所示静不定结构中,设三杆的材料相同,横截面面积同 为A 。试求使结构开始出现塑性变形的载荷1P 、极限载荷p P 。 解:以1N 和2N 分别表AC 和AD 杆的轴力,3N 表AB 杆的轴力。令s 1E E =, s 1A A =,得 图15.9 三杆桁架
单向静拉伸试验:是应用最广泛的力学性能试验方法之一。 1)可揭示材料在静载下的力学行为(三种失效形式):即:过量弹性变形、塑性变形、断裂。 2)可标定出材料最基本力学性能指标:如:屈服强度、抗拉强度、伸长率、断面收缩率等。 拉伸力-伸长曲线 拉伸曲线: 拉伸力F -绝对伸长△L 的关系曲线。 在拉伸力的作用下,退火低碳钢的变形过程四个阶段: 1)弹性变形:O ~e 2)不均匀屈服塑性变形:A ~C 3)均匀塑性变形:C ~B 4)不均匀集中塑性变形:B ~k 5)最后发生断裂。k ~ 弹性变形:当外力去除后,能恢复到原形状或尺寸的变形。 特点:可逆性、单值线性、同相位、变形量小 本质:都是构成材料的原子(离子)或分子从平衡位置产生可逆位移的反映。 弹性模量E :是表征材料对弹性变形的抗力,工程称材料的刚度. E 值越大,在相同应力下产生的弹性变形就越小。 弹性模量是结构材料的重要力学性能指标之一。 影响因素:1、键合方式 2、原子结构 3、晶体结构 4、化学成分 5.微观组织 6.温度 弹性模量 E 与切变模量 G 关系:(其中: ν-泊松比。) 比例极限σp :是材料弹性变形按正比关系变化的最大应力,即拉伸应力一应变曲线上开始 偏离直线时的应力值。 弹性极限:材料由弹性变形过渡到弹-塑性变形时的应力,当应力超过弹性极限σe 后,便 开始产生塑性变形。 (比例极限σp 和弹性极限σe 与屈服强度的概念基本相同,都表示材料对微量塑性变形的 抗力,影响因素也基本相同。) 弹性比功ae :(弹性比能、应变比能)表示材料在弹性变形过程中吸收弹性变形功的能力。 一般用材料开始塑性变形前单位体积吸收的最大弹性变形功表示。 物理意义:吸收弹性变形功的能力。 几何意义:应力σ -应变ε曲线上弹性阶段下的面积。 欲提高材料的弹性比功:提高σe ,或降低 E 弹簧钢:含碳较高并添加Si 、Mn 等合金元素强化基体,经淬火+中温回火获得回火托氏体 组织及冷变形强化,以提高其弹性极限,使弹性比功ae 和弹性提高。 纯弹性体的弹性变形:只与载荷大小有关,而与加载方向和加载时间无关。 2E G ν=(1+)
第一章塑性变形的力学基础 1、塑性加工时所受的外力 金属在发生塑性变形时,作用在变形物体上的外力有两种:作用力和约束反力。第二讲塑性变形的力学基础返回首页 2、作用力 通常把压力加工设备可动工具部分对变形金属所作用的力叫作用力或主动力。用实际例子加以说明: (1)锻压时锤头对工件的压力(图1-1a中之P); (2)挤压加工时活塞对金属推挤的压力(图1-1b中之P); (3)拉拔加工时,工件所承受的拉力(图1-1c中之P)。 图1-1 基本压力加工过程的受力图和应力状态图 (a)镦粗;(b)挤压;(c)拉拔;(d)轧制 3、约束反力 工件在主动力的作用下,其运动将受到工具阻碍而产生变形。金属变形时,其质点的流动又会受到工件与工具接触面上摩擦力的制约,因此工件在主动力的作用下,其整体运动和质点流动受到工具的约束时就产生约束反力。这样,在工件和工具的接触表面上的约束反力就有正压力和摩擦力。 (1)正压力 沿工具和工件接触表面法线方向阻碍工件整体移动或金属流动的力,它的方向和接触面垂直,并指向工件,如图1-1中之N。 (2)摩擦力 沿工具和工件接触面切线方向阻碍金属流动的力,它的方向和接触面平行,并与金属质点流动方向和流动趋势相反。如图1-1中之T。
4、轧制压力 轧件对轧辊总的正压力和摩擦力的合力值等于轧辊对轧件的总压力,我们把轧件对轧辊总压力的垂直分力叫轧制压力,也就是轧机压下螺丝承受的力。 5、内力的概念和内力产生的原因 (1)内力的概念:当物体在外力作用下,并且物体的运动受到阻碍时,为了平衡外力而在物体内部产生的力叫内力 (2)内力产生的原因: 为了平衡外部的机械作用所产生的内力。在生产加工(轧制)过程中,由于不均匀变形、不均匀加热或冷却(物理过程)及金属内的相变(物理-化学过程)等,都可以促使金属内部产生内力。 6、应力、应力集中 (1)应力的概念:内力的强度称为应力,或者说是内力的大小以应力来度量,即以单位面积上所作用的内力大小表示之。应力的单位一般用N/m2(Pa)或N/mm2(MPa)表示之。 (2)应力集中的概念: 当金属内部存在应力,其表面又有尖角、缺口、结疤、折迭、划伤、裂纹等缺陷存在时,应力将在这些缺陷处集中分布,使这些缺陷部位的实际应力比正常的应力高出数倍。这种现象叫做应力集中。 金属内部的气泡、缩孔、裂纹、夹杂物等对应力的反应与物体的表面缺陷相同,在应力作用下,也会发生应力集中。 (3)应力集中的危害: 应力集中在很大程度上降低了金属的塑性,金属的破坏往往从应力集中的地方开始。 7、弹性变形和塑性变形的概念 (1)弹性变形的概念: 去掉所加的力后,变形也就消失,物体恢复到原来的形状和尺寸。 (2)塑性变形的概念: 去掉所加的力后,在宏观上产生了不能复原的永久变形,这就是塑性变形。 8、应力状态 (1)应力状态的定义 所谓物体处于应力状态,就是物体内的原子被迫偏离其平衡位置的状态。
第一章: 单向静拉伸试验:是应用最广泛的力学性能试验方法之一。 1)可揭示材料在静载下的力学行为(三种失效形式):即:过量弹性变形、塑性变形、断裂。 2)可标定出材料最基本力学性能指标:如:屈服强度、抗拉强度、伸长率、断面收缩率等。 拉伸力-伸长曲线 拉伸曲线: 拉伸力F -绝对伸长△L 的关系曲线。 在拉伸力的作用下,退火低碳钢的变形过程四个阶段: 1)弹性变形:O ~e 2)不均匀屈服塑性变形:A ~C 3)均匀塑性变形:C ~B 4)不均匀集中塑性变形:B ~k 5)最后发生断裂。k ~ 第二章: 弹性变形:当外力去除后,能恢复到原形状或尺寸的变形。 特点:可逆性、单值线性、同相位、变形量小 本质:都是构成材料的原子(离子)或分子从平衡位置产生可逆位移的反映。 弹性模量E :是表征材料对弹性变形的抗力,工程称材料的刚度. E 值越大,在相同应力下产生的弹性变形就越小。 弹性模量是结构材料的重要力学性能指标之一。 影响因素:1、键合方式 2、原子结构 3、晶体结构 4、化学成分 5.微观组织 6.温度 弹性模量 E 与切变模量 G 关系:(其中: ν-泊松比。) 比例极限σp :是材料弹性变形按正比关系变化的最大应力,即拉伸应力一应变曲线上开始偏离直线时的应力值。 弹性极限:材料由弹性变形过渡到弹-塑性变形时的应力,当应力超过弹性极限σe 后,便开始产生塑性变形。 (比例极限σp 和弹性极限σe 与屈服强度的概念基本相同,都表示材料对微量塑性变形的抗力,影响因素也基本相同。) 弹性比功ae :(弹性比能、应变比能)表示材料在弹性变形过程中吸收弹性变形功的能力。一般用材料开始塑性变形前单位体积吸收的最大弹性变形功表示。 物理意义:吸收弹性变形功的能力。 几何意义:应力σ -应变ε曲线上弹性阶段下的面积。 欲提高材料的弹性比功:提高σe ,或降低 E 2E G ν=(1+)
弯曲变形 基本概念题 一、选择题 1.梁的受力情况如图所示,该梁变形后的 挠曲线如图()所示(图中挠曲线的虚线部 分表示直线,实线部分表示曲线)。 2. 如图所示悬臂梁,若分别采用两种坐标 系,则由积分法求得的挠度和转角的正负号为 ()。 题2图题1图 A.两组结果的正负号完全一致 B.两组结果的正负号完全相反 C.挠度的正负号相反,转角正负号一致 D.挠度正负号一致,转角的正负号相反 3.已知挠曲线方程y = q0x(l3 - 3lx2 +2 x3)∕(48EI),如图所示,则两端点的约束可能为下列约束中的()。 题3图 4. 等截面梁如图所示,若用积分法求解梁的转角、挠度,则以下结论中( )是错误的。 A.该梁应分为AB、BC两段进行积分 B.挠度积分表达式中,会出现4个积分常数 -26-
题4图 题5图 C .积分常数由边界条件和连续条件来确定 D .边界条件和连续条件表达式为x = 0,y = 0;x = l ,0==右左y y ,0='y 5. 用积分法计算图所示梁的位移,边界条件和连续条件为( ) A .x = 0,y = 0;x = a + l ,y = 0;x = a ,右左y y =,右左 y y '=' B .x = 0,y = 0;x = a + l ,0='y ;x = a ,右左y y =,右左 y y '=' C .x = 0,y = 0;x = a + l ,y = 0,0='y ;x = a ,右左y y = D .x = 0,y = 0;x = a + l ,y = 0,0='y ;x = a ,右左 y y '=' 6. 材料相同的悬臂梁I 、Ⅱ,所受荷载及截面尺寸如图所示。关于它们的最大挠度有如 下结论,正确的是( )。 A . I 梁最大挠度是Ⅱ梁的 41倍 B .I 梁最大挠度是Ⅱ梁的2 1 倍 C . I 梁最大挠度与Ⅱ梁的相等 D .I 梁最大挠度是Ⅱ梁的2倍 题6图 题7图 7. 如图所示等截面梁,用叠加法求得外伸端C 截面的挠度为( )。 A . EI Pa 323 B . EI Pa 33 C .EI Pa 3 D .EI Pa 233 8. 已知简支梁,跨度为l ,EI 为常数,挠曲线方程为)24)2(323EI x lx l qx y +-=, -27-
金属材料塑性变形与断裂的关系 摘要:金属的断裂是指金属材料在变形超过其塑性极限而呈现完全分开的状态。材料受力时,原子相对位置发生了改变,当局部变形量超过一定限度时,原于间结合力遭受破坏,使其出现了裂纹,裂纹经过扩展而使金属断开。任何断裂都是由裂纹形成和裂纹扩展两个过程组成的,而裂纹形成则是塑性变形的结果。金属塑性的好坏表明了它抑制断裂能力的高低。 关键词:塑性变形解理断裂准解理断裂沿晶断裂冷脆疲劳应力腐蚀 氢脆高温断裂 一、解理断裂与塑变的关系 解理断裂在主应力作用下,材料由于原子键的破断而产生的沿着某一晶面的快速破断过程。解理断裂的的产生条件是位错滑移必须遇到阻力,且位错滑移聚集到一定程度。断裂面沿一定的晶面发生,这个平面叫做解理面。解理台阶是沿两个高度不同的平行解理面上扩展的解理裂纹相交时形成的。形成过程有两种方式:通过解理裂纹与螺型位错相交形成;通过二次解理或撕裂形成。 第一种,当解理裂纹与螺型位错相遇时,便形成一个台阶,裂纹继续向前扩展,与许多螺型位错相交便形成众多台阶,他们沿裂纹前端滑动而相互交汇,同号台阶相互汇合长大,异号台阶相互抵消,当汇合台阶足够大的时候便在电镜下观察为河流状花样。 第二种,二次解理是指在解理裂纹扩展的两个互相平行解理面间距较小时产生的,但若解理裂纹的上下两个面间距远大于一个原子间距时,两解理裂纹之间的金属会产生较大的塑性变形,结果由于塑性撕裂而形成台阶,称为撕裂棱晶界。舌状花样是由于解理裂纹沿孪晶界扩散留下的舌头状凹坑或凸台。 从宏观上看,解理断裂没有塑性变形,但从微观上看解理裂纹是以塑性变形为先导的,尽管变形量很小。解理断裂是塑性变形严重受阻,应力集中非常严重的一种断裂。 二、准解理断裂与塑变的关系 准解理断裂介于解理断裂和韧窝断裂之间,它是两种机制的混合。产生原因:
塑性变形的力学原理 element of mechanics of plasticity 从认定塑性变形体为均质连续体出发,依据宏观的实验结果,研究变形体内的应力、应变以及它们和变形温度、速度等条件之间的关系(见金属塑性变形)。 应力-应变曲线在材料试验中,常用圆棒受拉,短柱受压,薄壁管受扭转,以测定负载和变形的关系;然后分别算出单位面积上的负载(称为应力,常用ζ表示)和单位长度的变形(称为应变,常用ε表示)。材料的ζ和ε间的对应关系称为应力-应变曲线(ζ-ε曲线)。最常用的试验是试样受拉时,由原始长 度l0增加到l,常称比值为工程应变或应变,而称自然对数值l n (l/l )为对数应 变或真应变。若在外力P的作用下,受拉试样由原始截面积A 减小到每一瞬间的 值A,则称比值P/A 为习惯应力,P/A为真应力。常见的延性金属的应力-应变曲线,按有无明显的屈服点,分为两类(见金属力学性能的表征)。 对于小变形量,用工程应力-应变曲线即可;而对于大变形量,需用真应力-应变曲线。在一次受拉试验中,我们可以得到材料的特征性的ζ-ε曲线,此外,还可以得到材料的屈服应力(ζs)、断裂应力(ζb)、截面收缩率(ψ%)、延伸率即伸长率(δ%)和弹性模量(E)等特性指标。 常用ζs作为材料塑性变形时的抗力,ψ%和δ%为其承受塑性变形的能力(塑性指标)。但对塑性加工而言,由于变形量大、变形条件复杂,所以上述指标值不能直接应用,而只能表示某个可以单独测定的条件(如温度、变形速率等)对变形抗力和塑性指标的影响。因此我们常用ζ0来表示材料在简单应力状态条件下的变形抗力,用ζ表示在某个复杂条件下的变形抗力;在高变形速率的实验 中,由于ζ s 和ζ b 难于分别测定,所以有时也用ζb的变化来代表变形抗力的变 化。 塑性加工总是在复杂的应力状态条件下实现的。早在1911年卡门(T.von Karman)就用实验证明在高流体静压力下,通常认为是“脆性的”花岗岩可以有相当大的塑性变形。但是从一个简单的试验结果出发来定量地描述各种加工条件下的塑性指标,是很困难的;因而必须用接近于加工条件的方式进行实测,测得的数值称为塑性加工性指标(见金属塑性加工)。我们用塑性变形条件来计算应力状态条件对于变形抗力的影响。 复杂应力下的塑性变形有两个论题:如何用最简化的数学语言叙述复杂应力状态?在这样的背景下如何叙述进入塑性变形状态的条件? 应力状态条件取均质连续体内一点(或不考虑力分布的单元体)作受力分析的对象,则可证明存在着一组唯一的三维直角坐标系,不论外部的作用力如何分布,在此系内沿坐标面在单元体上的切应力为零。此坐标系称为主坐标系,垂直于坐标面的正应力称为主应力,常用ζ1、ζ2、ζ3表示。这样,任何复杂的
杆件的塑性变形 15.1 概 述 工程问题中绝大部分构件必须在弹性范围内工作,不允许出现塑性变形。但有些问题确须考虑塑性变形。 15.2 金属材料的塑性性质 图15.1是低碳钢拉伸的应力-应变曲线。过屈服极限后,应力和应变的关系是非线性的有 p e εεε+= (15.1) 弹性范围内,应力和应变之间是单值对应的。塑性阶段却并非如此,应力和应变不再是单值对应的关系(如图15.2)。 下面是几种常见的塑性材料模型。 图 15.1 低碳钢拉伸的应力-应变曲线 图15.2 弹塑性应力-应变
有时也把应力-应变关系近似地表为幂函数,幂强化材料的应力-应变关系曲线如图15.7所示。 n εσc = 15.3 拉伸和压缩杆系的塑性分析 现以图15.8所示两端固定的杆件为例来说明静不定拉压杆系的塑性分析,当载荷P 逐渐增加时,杆件两端的反力是 b a Pa R b a Pb R += ' += 21 (a) P 力作用点的位移是 ()b a EA Pab EA a R += =1δ (b) 如a b >则21R R >。随着P 的增加, AC 段 图15.3 理想弹塑性材料模型 图15.4刚塑性材料模型 图15.6刚塑性线性强化材料模型 图15.5线性强化材料模型 图15.7幂强化材料模型
的应力将首先达到屈服极限。若相应的载荷 为1P ,载荷作用点的位移为1δ,由(a )、(b ) 两式求得 () b b a A P A b a b P R += =+= s 1, S 111σσ E a s 1σδ= 由平衡方程可知 S 2σA P R -= (c) 载荷作用点c 的位移为 ()EA b P P 11-+ =δδ (d) CB 段也进入塑性阶段时,S 2σA R =,由(c )式求出相应的载荷为 S 22σA P = 载荷达到2P 后,整个杆件都已进入塑性变形。 例18.1 在图15.9a 所示静不定结构中,设三杆的材料相同,横截面面积同为A 。试求使结构开始出现塑性变形的载荷1P 、极限载荷 p P 。 解:以1N 和2N 分别表AC 和AD 杆的轴力,3N 表AB 杆的轴力。令s 1E E =, s 1A A =,得 图15.9 三杆桁架
第一章一维条件下的弹塑性变形 一、教学目标 了解塑性力学中的两个基本实验:单向拉伸实验和静水压力实验; 掌握塑性强化材料和理想弹塑性材料的应力应变曲线异同; 了解刚塑性模型和幂次强化模型; 掌握包氏效益应力-应变变化过程,两种强化模型:随动强化和等向强化模型; 了解塑性变形的细观机理和等效比拟; 明确弹塑性力学与弹性力学解题的差异:应力-应变过程相依关系; 掌握塑性强化和理想弹塑性材料的本构关系:增量本构和全量本构。 二、教学内容 介绍金属的单向拉伸压缩实验和静水压力实验结果——应力-应变曲线,讲解两种不同材料拉伸曲线异同和简化模型,介绍静水压力对变形过程的影响; 介绍应变强化现象,讲解两种强化模型的后继屈服限的异同; 介绍弹塑形变形的细观机理和一维变形行为的等效模型,更直观的说明材料在拉压和加卸载时的变形; 介绍弹性和塑形应力-应变曲线的异同,过程相依的概念; 讲解塑形强化材料和理想弹塑性材料的一维增量本构关系和全量本构关系。 三、重点难点 1)重点: 两种材料模型,及相应的应力-应变简化曲线;两个强化模型;两种细观机理;两种本构关系。 2)难点: 本构关系的推导。
四、 讲课提纲 五、 讲课内容 1一维应力条件下的弹塑性变形 1.1金属材料基本实验 在塑性力学中有两个基本实验:单向拉伸(或压缩)实验;材料在静水压力作用下物体体积变形的实验。这两个实验的结果是建立各种塑性理论的基础,现分别介绍: 1.1.1金属材料受单轴拉伸和压缩 引例: 材料力学中低碳钢试样的拉伸实验。以标准形状(尺寸)的试件在材料试验机上进行,试件在受到拉力F 作用时可以认为其中一段是处于均匀的单向应力状态。 真实应力曲线 本质 细观机理 等效模型 弹性 滑移(塑性) 理论公式化 增量本构关系 一维增量本构关系 全量本构关系 一维全量本构关系 0 d d σ ε 两种增量 可恢复变形 体积改变 永久变形 体积不变 拉压对称 现象 金属材料简单拉压 两种材料 模型 静水压力 体积变化基本是弹性的 理想弹塑形 屈服平台 塑性强化 屈服后任抵抗变形 应变强化 随动强化 (包氏效应) 等向强化 两种强化模型 σ ε
第三章金属塑性变形的力学基础 金属在外力作用下由弹性状态进入塑性状态,研究金属在塑性状态下的力学行为称为塑性理论或塑性力学,它是连续介质的一个力学分支。为了简化研究过程,塑性理论通常采用以下假设: 1)变形体是连续的,即整个变形体内不存在任何空隙。这样,应力、应变、位移等物理量也都是连续的,并可用坐标的连续函数来表示。 2)变形体是均质的和各向同性的。这样,从变形体上切取的任一微元体都能保持原变形体所具有的物理性质,且不随坐标的改变而变化。 3)在变形的任意瞬间,力的作用是平衡的。 4)在一般情况下,忽略体积力的影响。 5)在变形的任意瞬间,体积不变。 在塑性理论中,分析问题需要从静力学、几何学和物理学等角度来考虑。静力学角度是从变形体中质点的应力分析出发,根据静力学平衡条件导出该点附近各应力分量之间的关系式,即平衡微分方程。几何学角度是根据变形体的连续性和均匀性,用几何的方法导出应变分量与位移分量之间的关系式,即几何方程。物理学角度是根据实验与假设导出应变分量与应力分量之间的关系式。此外,还要建立变形体从弹性状态进入塑性状态并使塑性变形继续进行时,其应力分量与材料性能之间的关系,即屈服准则或塑性条件。 以上是塑性变形的力学基础,也是本章的主要内容。它为研究塑性成形力学问题提供基础理论。 第一节金属塑性成形过程的受力分析 塑性成形是利用金属的塑性,在外力作用下使金属成形的一种加工方法。作用于金属的外力可以分为两类:一类是作用在金属表面上的力,称为面力或接触力,它可以是集中力,但更一般的是分布力;第二类是作用在金属每个质点上的力,称为体积力。 1. 面力 面力可分为作用力、反作用力和摩擦力。 作用力是由塑性加工设备提供的,用于使金属坯料产生塑性变形。在不同的塑性加工工序中,作用力可以是压力、拉力或剪切力,但在多数情况下是用压力来成形的,因此塑性加工又称为压力加工。 反作用力是工具反作用于金属坯料的力。一般情况下,反作用于金属的力与施加的作用力互相平行,并组成平衡力系,如图3-1a中,F=F’(F—作用力、F’—反作用力)。而在图2-1b、c中,反作用力F’’自相平衡。 a)b)c)
弯曲变形 1. 已知梁的弯曲刚度EI 为常数,今欲使梁的挠曲线在x =l /3处出现一拐点,则比值M e1/M e2为: (A) M e1/M e2=2; (B) M e1/M e2=3; (C) M e1/M e2=1/2; (D) M e1/M e2=1/3。 答:(C) 2. 外伸梁受载荷如 致形状有下列(A)(B)、(C),(D)答:(B) 3. 简支梁受载荷并取坐标系如图示,则弯矩M 、剪力F S 与分布载荷q 之间的关系以及挠曲线近似微分方程为: (A)EI x M x w q x F F x M ) (d d ,d d , d d 2 2S S ===; (B)EI x M x w q x F F x M )(d d ,d d , d d 2 2 S S =-=-=; (C)EI x M x w q x F F x M )(d d ,d d , d d 2 2S S -==-=; (D)EI x M x w q x F F x M )(d d ,d d , d d 2 2S S -=-==。 答:(B) 4. 弯曲刚度为EI 的悬臂梁受载荷如图示,自由端的挠度EI l M EI Fl w B 232 e 3 +=
(↓) 则截面C 处挠度为: (A)2 e 3 322323??? ??+??? ??l EI M l EI F (↓); (B)2 3 3223/323??? ??+??? ??l EI Fl l EI F (↓) ; (C)2 e 3 322)3/(323??? ??++??? ??l EI Fl M l EI F (↓);(D)2 e 3 322)3/(323? ? ? ??-+??? ??l EI Fl M l EI F (↓)。 答:(C) 5. 画出(a)、(b)、(c)三种梁的挠曲线大致形状。 答: 6. 7. (a)、(b) 刚度关系为下列中的哪一种: (A) (a)>(b); (B) (a)<(b); (C) (a)=(b); (D) 不一定。 答:(C) 8. 试写出图示等截面梁的位移边界条件,并定性地画出梁的挠曲线大致形状。 答:x =0, w 1=0, 1w '=0;x =2a ,w 2=0 =2a , 32 w w '='。 9. 试画出图示静定组合梁在集中力F 作用下挠曲线的大致形状。 (a) (b) (c) w ===θw w
、弹性和塑性的概念 可变形固体在外力作用下将发生变形。根据变形的特点,固体在受力过程中的力学行为可分为两个明显不同的阶段: 当外力小于某一限值(通常称之为弹性极限荷载)时,在引起变形的外力卸除后,固体能完全恢复原来的形状,这种能恢复的变形称为弹性变形,固体只产生弹性变形的阶段称为弹性阶段;当外力一旦超过弹性极限荷载时,这时再卸除荷载,固体也不能恢复原状,其中有一部分不能消失的变形被保留下来,这种保留下来的永久变形就称为塑性变形,这一阶段称为塑性阶段。 根据上述固体受力变形的特点,所谓弹性,就定义为固体在去掉外力后恢复原来形状的性质;而所谓塑性,则定义为在去掉外力后不能恢复原来形状的性质。弹性(Elasticity)”和塑性(Plasticity)”是可变形固体的基本属性,两者的主要区别在于以下两个方面:1)变形是否可恢复: 弹性变形是可以完全恢复的,即弹性变形过程是一个可逆的过程;塑性....... 变形则是不可恢复的,塑性变形过程是一个不可逆的过程。 2)应力和应变之间是否一一对应: 在弹性阶段,应力和应变之间存在一一对应的单值函数关............. 系,而且通常还假设是线性关系;在塑性阶段,应力和应变之间通常不存 在一一对应的关系,而且是非线性关系(这种非线性称为物理非线性)。 工程中,常把脆性和韧性也作为一对概念来讲,它们之间的区别在于固体破坏时的变形大小,若变形很小就破坏,这种性质称为脆性;能够经受很大变形才破坏的,称为韧性或延性。 通常,脆性固体的塑性变形能力差,而韧性固体的塑性变形能力强。 二、弹塑性力学的研究对象及其简化模型
弹塑性力学是固体力学的一个分支学科,它由弹性理论和塑性理论组成。弹性理论研究理想弹性体在弹性阶段的力学问题,塑性理论研究经过抽象处理后的可变形固体在塑性阶段的力学问题。因此,弹塑性力学就是研究经过抽象化的可变形固体,从弹性阶段到塑性阶段、直至最后破坏的整个过程的力学问题。 构成实际固体的材料种类很多,它们的性质各有差异,为便于研究,往往根据材料的主要性质做出某些假设,忽略一些次要因素,将它抽象为理想的“模型”。在弹性理论中,实际固体即被抽象为所谓的“ 理想弹性体”,它是一个近似于真实固体的简化模型。“理想弹性”的特征是: 在一定的温度下,应力和应变之间存在一一对应的关系,而且与加载过程无关,与时间无关。 在塑性理论中,由于实际固体材料在塑性阶段的应力-应变关系过于复杂,若采用它进行理论研究和计算都非常复杂,因此,同样需要进行简化处理。常用的简化模型可分为两类,即理想塑性模型和强化模型。 1.理想塑性模型 在单向应力状态下,理想塑性模型的特征如图 0.1 所示。理想塑性模型又分为理想弹塑性模型和理想刚塑性模型。当所研究的问题具有明显的弹性变形时,常采用理想弹塑性模型。 在总变形较大、而且弹性变形部分远小于塑性变形部分时,为简化计算,常常忽略弹性变形部分,而采用理想刚塑性模型;另外,在计算结构塑性极限荷载时,也常采用理想刚塑性模型。 2.强化模型 在单向应力状态下,强化模型的特征如图 0.2 所示。强化模型又分为线性强化弹塑性模型、线性强化刚塑性模型和幂次强化模型三种。
第六章弯曲变形 一、是非判断题 1.梁的挠曲线近似微分方程为EIy’’=M(x)。(√)梁上弯矩最大的截面,挠度也最大,弯矩为零的截面,转角为 零。(×) 两根几何尺寸、支撑条件完全相同的静定梁,只要所受载荷相 同,则两梁所对应的截面的挠度及转角相同,而与梁的材料是 否相同无关。(×) 等截面直梁在弯曲变形时,挠曲线的曲率最大值发生在转角等 于零的截面处。(×) 若梁上中间铰链处无集中力偶作用,则中间铰链左右两侧截面 的挠度相等,转角不等。(√) 简支梁的抗弯刚度EI相同,在梁中间受载荷F相同,当梁的跨 度增大一倍后,其最大挠度增加四倍。(×) 当一个梁同时受几个力作用时,某截面的挠度和转角就等于每 一个单独作用下该截面的挠度和转角的代数和。(√) 8.弯矩突变的截面转角也有突变。(×) 二、选择题 1. 梁的挠度是(D)
A 横截面上任一点沿梁轴线方向的位移 B 横截面形心沿梁轴方向的位移 C横截面形心沿梁轴方向的线位移 D 横截面形心的位移 2. 在下列关于挠度、转角正负号的概念中,(B)是正确的。 A 转角的正负号与坐标系有关,挠度的正负号与坐标系无关 B 转角的正负号与坐标系无关,挠度的正负号与坐标系有关 C 转角和挠度的正负号均与坐标系有关 D 转角和挠度的正负号均与坐标系无关 3. 挠曲线近似微分方程在(D)条件下成立。 A 梁的变形属于小变形 B 材料服从胡克定律 C 挠曲线在xoy平面内 D 同时满足A、B、C 4. 等截面直梁在弯曲变形时,挠曲线的最大曲率发生在(D)处。 A 挠度最大 B 转角最大 C 剪力最大 D 弯矩最大 5. 两简支梁,一根为刚,一根为铜,已知它们的抗弯刚度相同。跨中作用有相同的力F,二者的(B)不同。 A支反力 B 最大正应力 C 最大挠度D最大转角6. 某悬臂梁其刚度为EI,跨度为l,自由端作用有力F。为减小最大挠度,则下列方案中最佳方案是(B) A 梁长改为l /2,惯性矩改为I/8 B 梁长改为3 l /4,惯性矩改为I/2 C 梁长改为5 l /4,惯性矩改为3I/2