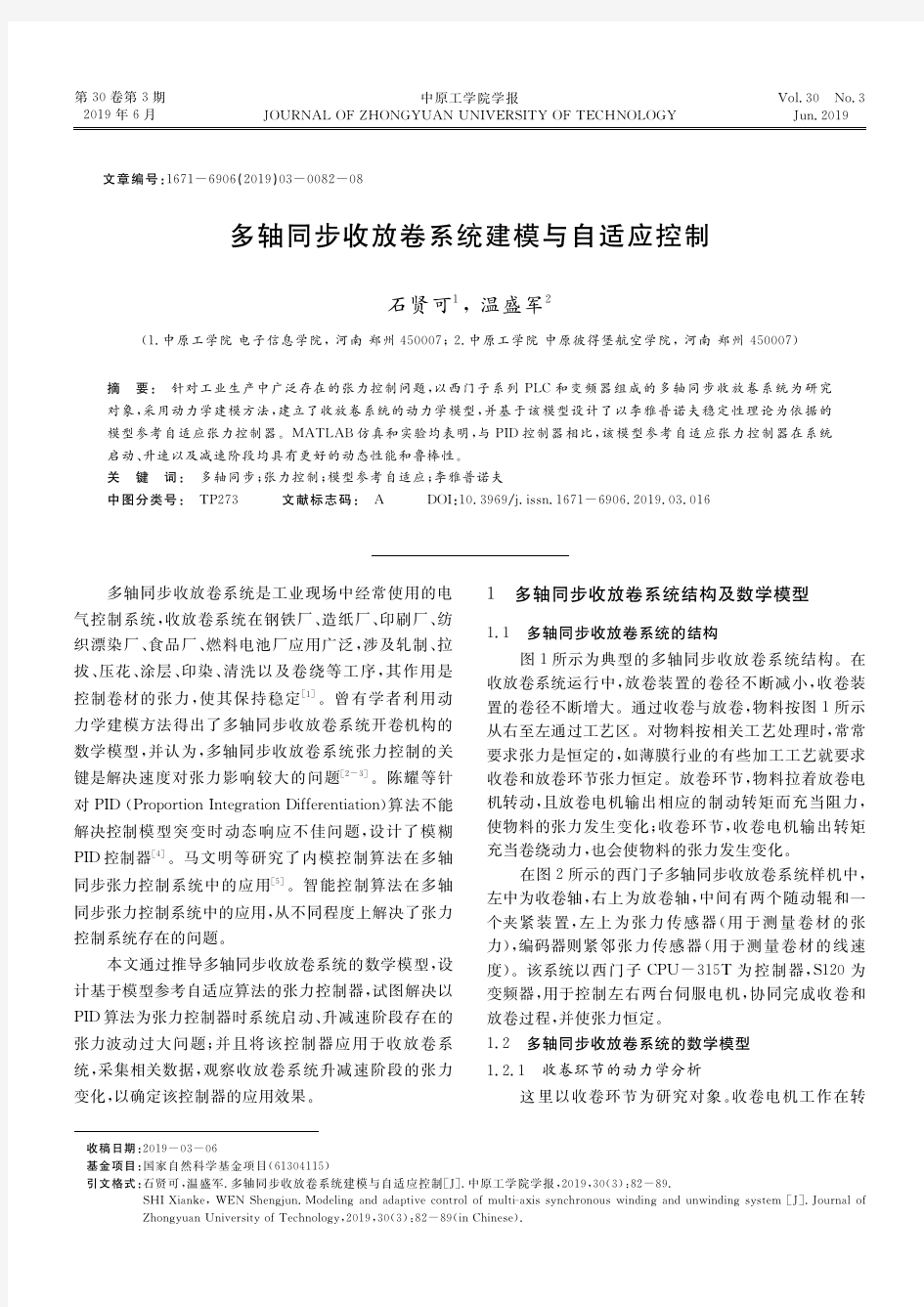
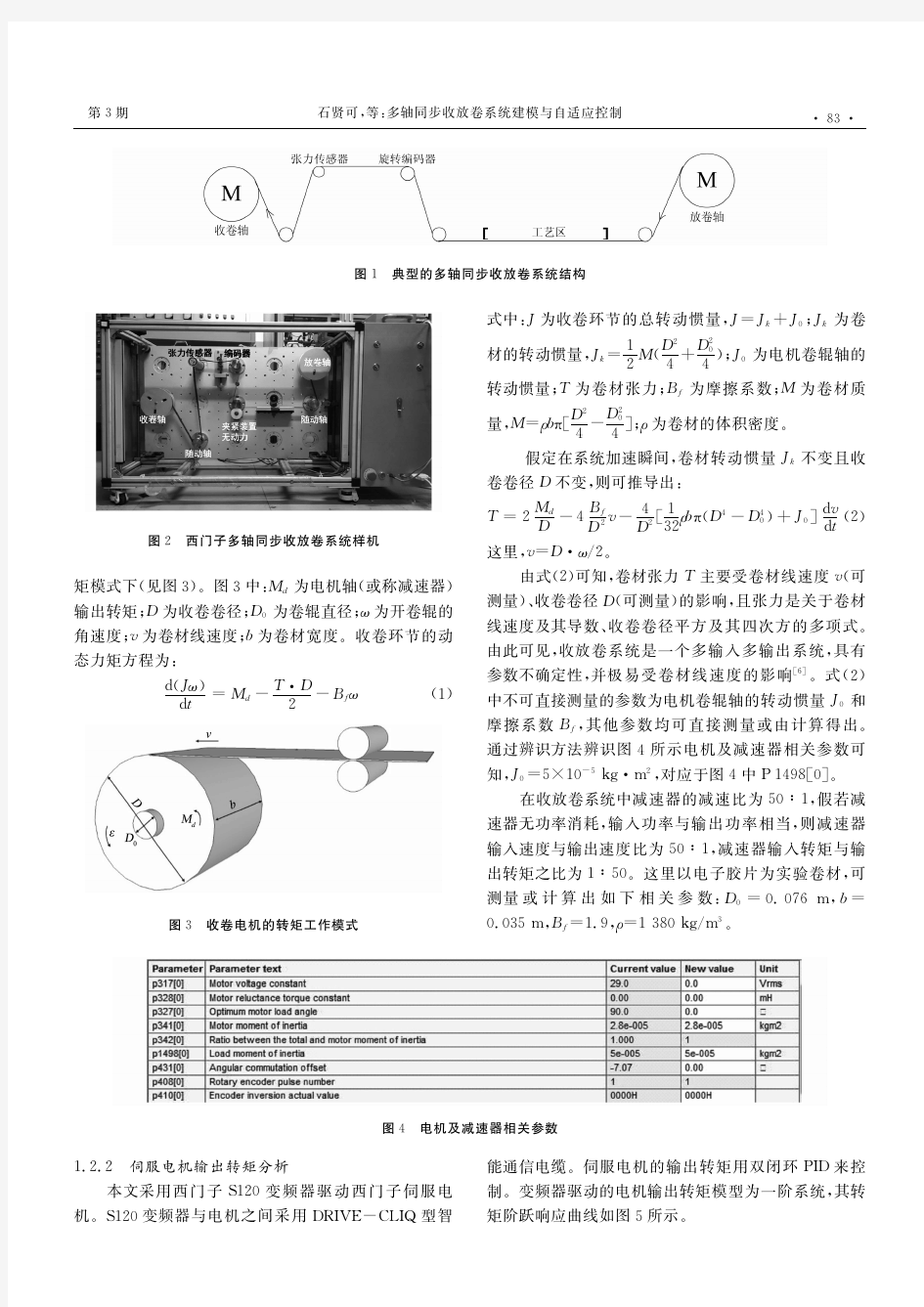
多轴系统同步控制技术研究 摘要:本文主要介绍多轴系统的同步控制技术。首先介绍了多轴系统的产生原因和同步控制的概念,然后结合两者介绍了多轴系统中同步控制技术的发展及其在数控系统中的应用情况。其次,详细阐述了多轴系统同步控制的控制机理,分析了同步控制的基本理论。基于控制机理,介绍了五种常用的同步控制策略,剖析了各种方法的优缺点及适用场合。最后,简要介绍了多轴系统中同步控制常用的控制算法。 关键字:多轴系统,同步控制,控制机理,控制策略,控制算法 Abstract:This article mainly introduces synchronous control skill in multi-axis system. First, it expounds the reasons of development of multi-axis and the concept of synchronous control, and then introduces the development of synchronous control in multi-axis system and application in CNC system by combining multi-axis system with synchronous control. Second, it expounds the control mechanism and basic theories of synchronous control. Based on control mechanism, this article introduces five control strategy methods, and discusses the relative merits of each method. At last, it presents the control algorithm used in synchronous control of multi-axis. Key Word:multi-axis system , synchronous control , control mechanism,control strategy , control algorithm 自1952年美国麻省理工学院研制成功第一台数控系统,数控技术经过半个多世纪的发展,在机械行业中得到了广泛的应用。随着电子技术和控制技术的飞速发展,当今的数控系统功能非常强大,数控系统的应用也日趋完善,大大的缩短了各种机械装置的生产周期,提高了机械加工效率和加工精度,改善了产品质量。 造纸、纺织、钣金加工等行业的发展,传统的单轴驱动技术因为存在以下局限性而难以满足这些领域内的应用需求:一方面单运动轴系统的输出功率存在上限,无法应用于对功率需求较大的场合;另一方面,使用单运动轴驱动大型对称负载,往往会导致两端负载的驱动力不一致,从而对加工质量和设备使用寿命产生不利影响]1[。为解决单轴系统的各种缺点与不足,多轴控制技术应运而生。当执行元件之间存在着一定的约束关系的时候,就需要采取适当的速度、位置策略对各执行器的运转进行同步控制。近年来伺服控制技术的飞速发展,多轴同步系统更是得到了广泛的应用。 所谓同步控制,就是一个坐标的运动指令能够驱动两个电动机同时运行,通
多轴系统同步控制技术研 究分解 Prepared on 24 November 2020
多轴系统同步控制技术研究 摘要:本文主要介绍多轴系统的同步控制技术。首先介绍了多轴系统的产生原因和同步控制的概念,然后结合两者介绍了多轴系统中同步控制技术的发展及其在数控系统中的应用情况。其次,详细阐述了多轴系统同步控制的控制机理,分析了同步控制的基本理论。基于控制机理,介绍了五种常用的同步控制策略,剖析了各种方法的优缺点及适用场合。最后,简要介绍了多轴系统中同步控制常用的控制算法。 关键字:多轴系统,同步控制,控制机理,控制策略,控制算法 Abstract:This article mainly introduces synchronous control skill in multi-axis system. First, it expounds the reasons of development of multi-axis and the concept of synchronous control, and then introduces the development of synchronous control in multi-axis system and application in CNC system by combining multi-axis system with synchronous control. Second, it expounds the control mechanism and basic theories of synchronous control. Based on control mechanism, this article introduces five control strategy methods, and discusses the relative merits of each method. At last, it presents the control algorithm used in synchronous control of multi-axis. Key Word:multi-axis system , synchronous control , control mechanism,control strategy , control algorithm 自1952年美国麻省理工学院研制成功第一台数控系统,数控技术经过半个多世纪的发展,在机械行业中得到了广泛的应用。随着电子技术和控制技术的飞速发展,当今的数控系统功能非常强大,数控系统的应用也日趋完善,大大的缩短了各种机械装置的生产周期,提高了机械加工效率和加工精度,改善了产品质量。
数控机床多轴同步控制方法 济南二机床集团有限公司李耿轶王宇融 关键词数控机床同步控制多轴 在机床控制中双轴或多轴同步控制是一种常见的控制方法,如动梁式龙门铣床的横梁升降控制,龙门框架移动式加工中心的龙门框架移动控制等。虽然在这些情况下可以采用单电动机通过锥齿轮等机械机构驱动双边的方案,但是传动机构复杂、间隙较大,容易造成闭环控制系统的不稳定,而且运行噪声大,维护困难。另外若用于负载转动惯量较大的场合,由于传动效率低,必然要选用功率很大的电动机,仅仅从经济性来考虑,这个方案就不太理想,因此采用两个电动机双边驱动是比较理想的方案,这就产生了双轴同步控制的问题。 1 机床多轴同步控制方案的比较 1.1 普通机床的同步控制 对于普通机床的双轴电动机同步控制一般有以下 解决方案。①由一套直流调速装置驱动两台直流电动机,两台电动机的电枢串联,励磁线圈并联。为了保持速度同步,两电动机轴必须保持刚性连接。两台电动机中只有一台电动机提供速度反馈信号,其控制示意图见图1。②由两套交流变频调速系统分别控制作为主从轴的两台交流变频或伺服电动机,两台电动机各自提供自己的速度反馈信号。为了保持速度同步,两电动机轴也须保持刚性连接,其控制示意图见2。 图1 直流调速系统的同步控制 这两种控制系统都属于位置环开环系统,只能依靠轴的刚性连接保持电动机转速或位置的同步,且结构简单、可靠性较高,我们为用户改造的B2063铣刨床X轴传动即采用图2所示的控制方法。这两种控制系统对电动机所连接的运动部件的实际位置不做检测,对于丝杠螺距、联轴节间隙、丝杠扭转、丝杠轴向变形等因素所产生的误差无法补偿,控制精度较差,因此不能应用于数控机床。
OpenHW12项目申请 基于ZYNQ SoC的多轴运动控制系统 安富利特别题目 基于Zynq平台的伺服控制或运动控制系统 项目成员: 华中科技大学 二〇一二年十一月
目录 1项目概述 (1) 1.1工业应用 (1) 1.2系统方案 (3) 2工作原理介绍 (6) 3项目系统框架图 (8) 3.1ZYNQ硬件系统框架图 (8) 3.2软件系统框架图 (9) 3.3多轴控制器实现 (10) 4项目设计预计效果 (11) 5附录一:项目技术基础 (13) 5.1软硬件协同设计架构 (13) 5.2软件设计 (14) 5.3总结 (16) 6附录二:ZYNQ基础 (16)
1项目概述 1.1工业应用 运动控制系统广泛应用于工业自动化领域,包括机器人手臂、装配生产线、起重设备、数控加工机床等等。并且随着高性能永磁材料的发展、电力电子技术的发展以及大规模集成电路和计算机技术的发展使得永磁同步电机(PMSM,Permanent Magnet Synchronous Motor)控制系统的设计开发难度降低、成本降低,同时PMSM在运动控制系统中作为执行器件的应用也越来越广泛。大量运动控制器的设计与实现都是基于通用嵌入式处理器。在此基础上,很多学者和研究人员对运动控制系统进行了大量的研究。 多轴控制的发展是为了满足工业机器人、工业传动等应用需求。其主要包括两大方面,多轴串联控制和多轴同步控制。当系统负载较大、传动精度要求很高、运行环境比较复杂的情况下,经常使用多轴串联的方式来解决,如图1.1所示。 (1)双电机齿条传动(2)NASA 70-m天线设备 图1.1 多轴串联控制系统应用
毕业设计(论文)开题报告 1.结合毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2000字左右的文献综述: 多轴运动控制器文献综述 摘要:运动控制是20世纪90年代在国际上兴起的结合现代电力电子技术、计算机 技术、传感器技术等进行控制系统设计的一门多学科交叉的技术,在数控机床、 汽车、轻工、纺织和军事等领域应用广泛,其中的数控技术、机器人技术更是一个 国家运动控制技术发展水平的重要标志。 Abstract:Motion control is a interdisciplinary technology in the nineteen nineties,as the combination of modern power electronics technology, computer Technology, sensor technology, control system design . In the NC machine tool,Auto, light industry, textile and military and other fields are widely used, in which the numerical control technology, robotic technology are the symbol of a state's level of development of motion control technology. 1.运动控制器的概念: 运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。这类控制器可以成为独立运行的运动控制器。这类控制器主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了相关的功能,用户只需要按照其协议要求编写应用加工代码文件,然后传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统2.运动控制需求:
数控插补多轴运动控制系统解剖实验 实验学时:8 实验类型:独立授课实验 实验要求:必修 一、实验目的 1、通过本实验使学生掌握数控插补多轴控制装置的基本工作原理; 2、根据常用低压电器原理分析各运动控制电气元件的应用原理,分析数控插补运 动实现的控制原理; 3、根据机电一体化产品的设计要求和设计流程进行运动控制系统的功能分析、机 械结构分析、控制系统分析以及相关传感器选型等方面的设计内容。 本实验以数控插补多轴运动控制系统为具体对象,使学生掌握机电一体化产品设计和开发的技术流程和主要内容,通过运动控制系统的实现过程掌握常用电气元件识别和原理、数控插补原理、位置伺服控制系统等的设计和实现方式。 二、实验内容 1、通过数控插补多轴控制装置及其相关系统的测试和观察,分析数控插补的工作 原理; 2、分析系统的功能、机械结构分析、运动关系以及相关传感器等,分析其相关的 机械结构、电机及其驱动模块和传感反馈环节等; 3、根据常用低压电器原理,分析系统各运动控制电气元件的应用原理,分析数控 插补运动过程实现的控制原理,并绘制相关的控制原理图和系统连接图。 三、实验设备 1、多轴运动控制系统一套(含电控箱) 2、PC机一台 3、GT-400-SG-PCI 卡一块(插在 PC机内部) 四、实验原理
该数控插补多轴运动控制系统是依据开放式数控系统原理构建的,其以通用计算机(PC)的硬件和软件为基础,采用模块化、层次化的体系结构,能通过各种形式向外提供统一应用程序接口的系统。开放式数控系统可分为 3类:(1)CNC 在 PC 中;(2)PC作为前端,CNC作为后端;(3)单 PC,双 CPU平台。 本实验采用第一类,把顾高公司的 GT-400-SG-PCI 多轴运动控制卡插入PC机的插槽中,实现电机的运动控制,完成多轴运动控制系统的控制。其优点如下:(1)成本低,采用标准 PC机;(2)开放性好,用户可自定义软件;(3)界面比传统的 CNC 友好。 图1为该系统的硬件构成图,运动平台机械本体采用模块化拼装,主要由普通PC机、电控箱、运动控制卡、伺服(步进)电机及相关软件组成。其主体由两个直线运动单元(GX系列)组成。每个GX系列直线运动单元主要包括:工作台面、滚珠丝杆、导轨、轴承座、基座等部分,其结构见图2。伺服型电控箱内装有交流伺服驱动器,开关电源,断路器,接触器,运动控制器端子板,按钮开关等。步进型电控箱则装有步进电机驱动器,开关电源,运动控制器端子板,船形开关等。 图1 数控插补多轴控制系统硬件构成
Abstract In particular, industrial robots refer to manipulators with multiple degrees of freedom, which are suitable for repetitive and highly demanding industrial production operations. They are often used in production lines such as spraying, welding and assembly, replacing higher-cost labor. It also increases production efficiency and yield. First of all, this article mainly analyzes the principle of industrial robots, and models them. The Lagrange method is used to establish the dynamical model equation of the robots as the controlled object in the paper. In addition, a cross-coupling control strategy is proposed for the problem of multi-axis synchronization to achieve simultaneous tracking of position and velocity between multiple axes. Then, an adaptive control algorithm is proposed for multi-axis synchronous control of industrial robots. The advantage of adaptive algorithms is the online estimation of unknown parameters in the system. Model reference adaptive algorithm is widely used,using the system model as a reference, the unknown parameters in the system ate extracted as variables, the reference model of the system is linearized, and the unknown online estimation parameters are added to the control law. Combining the adaptive control algorithm with the neural network, without relying on the system reference model, the RBF neural network is used to approximate all the models instead of the original unknown parameters, which improves the system’s ability to overcome friction and external interference. Then, it studies the application of sliding mode variable structure algorithm to industrial robots. It mainly solves the nonlinear characteristics and unpredictable external interference problems of the system. Once the system enters the sliding mode motion state, it has nothing to do with the control object parameter change and system disturbance. It has strong robustness, but it inevitably causes the system's chattering phenomenon. For this purpose, the law of exponential approaching laws is used to constrain the trajectory of the sliding mode to reduce buffeting. In addition, different stages of the sliding mode movement require different gains, and the gains of the fuzzy system and the adaptive control adjustment system are introduced to effectively reduce chattering. Finally, an experimental platform composed of upper computer, servo driver and industrial robot was established. The upper computer and servo driver used EtherCAT communication, and established a dynamic model for the EFORT industrial robot in the laboratory. The next, the obtained kinetic model equations are simulated in Matlab and each algorithm Simulink, and the output control torque data is obtained. A real-time task is established on the upper computer's EtherCAT master station, and the output control torque data is periodically transmitted to the servo driver through the robot control driver II
北京理工大学珠海学院 《计算机仿真》课程设计说明书题目: 控制系统建模、分析、设计和仿真 学院:信息学院 专业班级:自动化四班 学号: 学生姓名: 指导教师: 2012年 6 月 9 日
北京理工大学珠海学院 课程设计任务书 2011 ~2012 学年第2学期 学生姓名:专业班级: 指导教师:范杰工作部门:信息学院 一、课程设计题目 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为09xxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容 最少拍有波纹控制系统
[8号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取0.02秒,分别设计一单位加速度信号输入时的最少拍有波纹 控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 1、求被控对象传递函数G(s)的MATLAB 描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际闭环系统稳 定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳定的要求。 (8分) 6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。(12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。(3分) 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。(8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际闭环系统稳 定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际闭环系统稳 定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。(12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。(8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) ) 7)(5)(2()6)(1(879)(2+++++= s s s s s s s G
机车定置试验台多轴电气同步控制系统电气传动2005年第35卷第11期 机车定置试验台多轴电气同步控制系统 谢建灵汤钰鹏张忠权 北京交通大学 摘要:介绍了机车定置试验台的优点及其工作原理,提出了针对8K型电力机车定置试验台的励磁电流单闭环调节系统,解决了励磁调节系统的多轴电气同步控制以及电压、电流限制等问题。 关键词:多轴电气同步励磁调节限制定置试验台 Multi—spindleElectricSynchronizationControlling SystemofLocomotive7sFixationTestRig XieJianlingTangYupengZhangZhongquan Abstract:Thepaperintroducestheadvantagesandtheprincipleofthelocomotive’Sfixationtestrig,andpresentessingleclosed—loopregulatedsystemofexcitingcurrentoflocomotive’Sfixationtestrigon8Kelectric locomotive.Multi-spindleelectricsynchronizationcontrolandtheproblemsofvoltageandcurrentrestraintare solved. KeyⅥ:、rds..multi—spindleelectricsynchronizationexcitationregulationrestraintfixationtestrig 1引言2主电路及其工作原理 各种可进行机车运行试验的试验台的建成,为机务段机车检修过程的中间试验和验收前的检测提供了条件。机车定置试验台用于把机车定置在试验室内,重现机车在线路上的运行状态,以便对所试机车的牵引性能及参数进行测量和分析。经过实践,证实了机车定置试验台试验与线路运行试验相比具有如下优点: 1)试验周期短,试验成本低; 2)具有良好的重复性; 3)可任意设定工况进行加载试验。 为了使各轨道滚轮同步,即使各轨道滚轮的转速相同,可对机车定置试验台进行同步控制。同步控制有两种方式:一种是机械上的同步,即机械同步;另一种是对电路的控制实现同步,即电气同步。本文提出了针对8K型电力机车定置试验台的励磁电流单闭环调节系统,多轴同步采用电气同步控制方式,通过改变测功电机励磁电流的大小,调节加载在电机上的阻力矩,从而实现多轴的转速同步。 机车车辆在线路上运行时,各车轮的线速度相同,这要求机车定置试验台各滚轮的线速度相同,在其直径相等的条件下,则要求滚轮的转速相同。其次,为了实现4轴机车或动车稳定的牵引工况,要求滚轮提供与车轮牵引力大小相等的制动力即牵引负荷,而模拟其稳定的动力制动工况则需要滚轮提供与车轮制动力相当的驱动力即推送动力。 本试验台具有4组轨道轮对,各备一套采用直流电机的测功机组。本文仅对机车定置试验台制动工况进行设计和分析。机车定置试验台制动工况时的主电路原理如图1所示。 ~ 图1主电路原理图 33 万方数据
ACS多轴运动控制系统应用 为了满足当今半导体产业的最高的多轴自动化应用的需求,工程师们转而朝向把最好的集成和基于网络的控制属性的运动控制平台方向。许多先进机器的控制平台,即基于网络和集中控制开始看到从自动化领域里广泛的实践,因为它们需要大量的处理能力和通信带宽,这在几年前微处理器和网络技术是无法实现的。在高端多轴自动化行业很多人知道,从20 世纪90 年代以来的集中式多轴控制器的好处。使用中央高速处理器,处理协调多轴运动控制已被证明为确定性数字伺服控制的有效架构,使最快的更新率和精密的同步。 另外,网络结构,如CANopen 网络的,已经成功地实践在了太阳能电池板划线,半导体制造和通用自动化应用中等需要可扩展性,开放的多厂商和设备,对成本控制敏感的系统设计中的运动控制领域。网络标准也一直在不断发展,并且不断提高的带宽和可靠性。现在,随着基于以太网的实时工业网络,如EtherCAT 技术–决定性的实时工业网络具有足够的带宽以支持高性能协调很多个运动控制轴和I / O,是有可能的实现机器控制控制解决方案,他具有集中式和基于网络控制的最佳品质。下面是三个最近需要高度的协调和精确的多轴运动控制案例,每一个展现着对控制系统的独特的挑战和极限。1。太阳能电池板划线和光学检测设备扁平面板和薄片的激光划线经常需要用到极其高性能的运动控制,包括高的速度和加速度,高度协调的多轴激光路径,晶圆检查和及其最小的运动误差最大化光伏(PV)的晶圆密度或解决最小的缺陷。大尺寸面板占用面积超过一平方米以上;而且,由于面板增加的尺寸的规模,导致的机器设备的复杂性和多轴数和运动的性能和功率的需求。最近,太阳能面板板划线设备和检测设备的制造商在设计一条15 轴的生产线的控制系统是遇到了很多挑战。有些版本的机器还使用了其他辅助轴和I / O 设备。一个集中
摘要 步进电机是将电脉冲信号转变成角位移的执行机构,其转速、停止位置只与脉 冲信号的频率和脉冲数有关,具有误差小,易控制等特点,广泛应用于机械、电子、 纺织、化工、石油等行业。尤其是在医疗行业中,比如在X 光扫描方面,都会用到 电机,步进电机的优点使其成为医疗行业里最为适用的电机。本设计中的多轴控制 系统可以运用在X 光扫描仪等多种仪器上。 本设计选用STC89C55RD+型单片机作为核心控制单元,实现M35SP-7 型步进电机的多轴运动控制,并通过RS232 串口实现与上位PC 机通讯功能。设计中运用单 片机软件编程方式实现步进电机环形分配器功能,用P1.0 口、P1.1 口、P1.2 口和 P1.3 口分别控制四相步进电机的A 相、B 相、C 相和D 相绕组的通电顺序,软件上采用查表方法实现单双八拍工作方式环形脉冲分配。步进电机驱动部分采用 ULN2003A 驱动芯片,实现功率放大,驱动步进电机。最后使用Proteus 软件绘制 了单片机控制步进电机多轴运动的原理图。上述设计经实验验证是有效可行的。 关键词单片机,步进电机,多轴运动,串口通讯
Abstract Stepper motor is an implementing mechanism that convert the electronic pulse into angle displacement.Its speed and the stop position only about the frequency and pulse several of the pulse signal,its characteristics are minor error,easy to control and so on,it is widely applied to mechanical, electronic, textile, chemical, oil, etc. Especially in the medical industry,such as an x-ray scanning,need motors.Stepper motor's advantages make it become the most suitable medical industry machine.The multi-axis control system in the design can be used on a variety of instruments such as an x-ray scanning. This design choose STC89C55RD + SCM as the core of the control unit,to realize M35SP-7 type stepper motor's multi-axis control,and use RS232 serial to realize PC communication function.This design use SCM software programming realize stepper motor circular distribution function,P1.0, P1.1, P1.2 and P1.3 respectively controlling A, B, C and D phases' electricity order on the four phase step motor's.Software is used on look-up table method teak eight single working way circular pulse distribution.This design use ULN2003A realize power amplifier to drive stepper motor.Finally using Proteus to draw the principle diagram of the SCM control stepper motor multi-axis motion.The above design experiments showed is effective and feasible. Keywords:SCM, Stepper Motor, Multi-axis motion, serial communication
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920540705.0 (22)申请日 2019.04.19 (73)专利权人 南通苏尼康自动化技术有限公司 地址 226000 江苏省南通市崇川区紫琅路 30号狼山工业园2号楼5楼 (72)发明人 黄桢懿 冯程 (51)Int.Cl. G05B 19/04(2006.01) (54)实用新型名称多轴运动控制器(57)摘要本实用新型公开了多轴运动控制器,它包括触摸屏、铝面板、液晶屏、多块线路板和后盖,铝面板的中间开有放置触摸屏的窗口,触摸屏从铝面板的后侧往前侧方向安装在铝面板内,铝面板的后侧固定有后盖固定框,后盖固定框包括边框和底边,边框与底边垂直连接,底边固定在铝面板后侧,后盖固定框嵌于后盖内,液晶屏放置在后盖固定框内,液晶屏外设置有压板,所述压板将液晶屏固定在后盖固定框内,压板与后盖之间设置多块线路板,后盖的侧面设置有用于固定紧固件的锁耳,后盖通过紧固件与铝面板固定。在后盖和后盖固定框围成的空间内合理安排液晶屏和线路板的空间,各线路板之间通过铜支柱连接,上下之间有空间可以布置各元器件,触摸屏和液晶屏从铝面板的后侧安装进入,并且被后盖固定框围住,结构紧凑, 固定稳固。权利要求书1页 说明书2页 附图3页CN 209433206 U 2019.09.24 C N 209433206 U
权 利 要 求 书1/1页CN 209433206 U 1.多轴运动控制器,其特征在于:它包括触摸屏、铝面板、液晶屏、多块线路板和后盖,所述铝面板的中间开有放置触摸屏的窗口,所述触摸屏从铝面板的后侧往前侧方向安装在铝面板内,所述铝面板的后侧固定有后盖固定框,所述后盖固定框包括边框和底边,所述边框与底边垂直连接,所述底边固定在铝面板后侧,所述后盖固定框嵌于后盖内,所述液晶屏放置在后盖固定框内,所述液晶屏外设置有压板,所述压板将液晶屏固定在后盖固定框内,所述压板与后盖之间设置多块线路板,所述后盖的侧面设置有用于固定紧固件的锁耳,所述后盖通过紧固件与铝面板固定。 2.根据权利要求1所述的多轴运动控制器,其特征在于:所述液晶屏置于后盖固定框内并紧贴在铝面板后侧。 3.根据权利要求2所述的多轴运动控制器,其特征在于:各块线路板之间通过铜支柱连接固定,第一线路板与压板之间通过铜支柱连接,第二线路板与第一线路板之间通过铜支柱连接,第三线路板与第二线路板之间通过铜支柱连接。 4.根据权利要求3所述的多轴运动控制器,其特征在于:第三线路板上设置有多个通信端口。 2
多轴运动控制系统和实时通信网络 贝加莱工业自动化(上海)有限公司叶莘 在现代机械制造中,多轴运动控制已经越来越普遍,用电子方式来实现机械运动轴之间协调同步,取代了传统的机械凸轮和齿轮,给机械设计制造带来了巨大的灵活性。以往只有通过复杂的机械设计和加工才能实现的运动过程,现在可以通过软件编程轻松实现。而且,使用电子运动控制,精度更高,动态性能更好,没有机械损耗,使维护变得方便而简单。用户可以实现更加灵活的,模块化的机械结构。 在几乎所有的机械制造领域中,特别如纺织机械,印刷机械,包装机械,塑料机械,食品机械等,多轴运动控制的应用已经非常广泛,成为高性能,高品质机械制造的重要标志。 运动控制的核心是驱动系统,数据传输方式也逐渐由模拟量发展成基于总线的数字信号传输。为了有效协调同步各个轴的运动过程,实现高精度的多轴运动控制,一个实时高效的数字通信网络是必不可少的。 本文将讨论高精度多轴运动控制对通信网络提出了什么样的要求。然后以全球首个真正实时的工业以太网ETHERNET Powerlink为例,介绍一个完全符合这些要求的运动控制网络。 1. 多轴运动控制的模式和发展趋势 在多轴运动控制中,各个厂商提供的控制理念和模式不尽相同,各种类型都有其优缺点,用户要根据自己的实际需求来选择方案。 大体来说,控制模式可以从2个层面上区分:驱动单元和总体架构。从单个驱动单元来看,可以从智能集成度划分等级,从总体控制架构来看,有分布式和集中式2种模式不同的解决方案对通信网络的要求也不一样,下面我们先介绍一下上面提到的控制模式,以及它们分别对通信系统的要求。 驱动单元:非智能型和全智能型 对于单轴的驱动器来说,可以对它内部的智能集成度来进行划分。驱动系统的核心作用是按照控制要求驱动电机。可控的物理量有三个:扭矩,速度,位置。传感器把这三个物理量反馈到控制系统,由控制系统进行计算和输出,实现对这三个量的闭环控制,从而实现运动控制。众多厂商提供的驱动器按智能集成度大体可以分成三种类型: 1. 开环式驱动器 2. 自带电流闭环控制,速度闭环控制,有时也带位置闭环控制的驱动器 3. 集成运动控制系统的全智能型驱动器 第一种开环式的驱动器是一个单纯的执行机构,它本身只是一个放大器,把控制信号放大输出给相应功率的电机完成运动过程,所有的控制协调功能都由外部控制系统实现。 第二种驱动器自身集成了最多3层叠加的闭环控制。最底层是电流闭环,用来调制输出扭矩,在此基础上实现速度闭环,最上一层为位置闭环。这里的位置闭环只是相对于电机转子的旋转位置而言。如果要实现某种特定运动过程,比如在设定速度下精确定位,还需要外部的智能设备(运动控制系统)。 第三种类型是集成运动控制系统的驱动器,系统本身除了有三层闭环控制的功能外,也集成了运动控制系统,具有很高的智能,客户可以直接对其进行编程。机械行业应用中的典型运动过程,如包装机械,印刷机械,塑料机械中的常见的机械动作,被优化成软件工艺模块集成到驱动器内。用户不需要再对系统进行复杂的编程,直接给相应的工艺模块赋予参数就可以实现这些复杂动作。有些驱动器内甚至还集成PLC功能。这类驱动器不需要外部的控制系就可以单独完成复杂的运动控制。
多轴运动控制器 1、运动控制器概述 随着现代控制技术的提高,运动控制器的出现在某种意义上满足了新型数控系统的标准化、开放性的要求,为各种工业设备、国防设备以及智能医疗装置的自动化控制系统的研制和改造提供一个统一的硬件平台。整体而言,运动控制器是一种控制装置,其核心为中央逻辑控制单元,敏感元件一般为传感器,控制对象为电机或动力装置和执行单元。目前,大多数的运动控制器是一种基于PC机或工业PC机的上位控制单元,多用于控制步进电机或伺服电机,在控制过程中,控制器可以完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等)。一般地,控制器都配有开放的函数库供用户在DOS或Windows系统平台下自行开发,从而构造所需的控制系统。 图1给出典型的PC+运动控制器组成的开放式控制系统的简图:一般地,运动控制器发送运动控制指令到伺服驱动器,由伺服驱动器驱动伺服电机运行,再通过伺服电机上的编码器反馈信号返回至运动控制器,至此,整个运动控制系统实现运动控制器的闭环控制。 图1 典型的Pc+运动控制器组成的开放式控制系统的
2、运动控制器国内外研究现状 在20世纪90年代,国际发达国家就已经相继推出运动控制器产品,包括美国Deltatau公司的PMAC多轴运动控制器,英国TRIO 公司的PCI208多轴运动控制器以及德国MOVTEC公司开发的DEC4T运动控制器等。近年来,运动控制器作为一个独立的工业自动化控制类产品,已经被越来越多的工业领域所接受。目前,由这些发达国家研制的运动控制器已开始在机器人控制、半导体加工、飞行模拟器等新兴行业得到了很大的应用,其在传统的机床控制领域所占的市场份额也在不断的扩大。 我国在运动控制器产品开发方面相对滞后,1999年固高科技有限公司开始开发、生产开放式运动控制器,随后,国内又有其它几家公司进入该领域,但实际上,其大多是在国内推广国外生产的运动控制器产品,真正进行自主开发的公司较少。深圳固高、深圳摩信是国内较早(20世纪90年代晚期)从事独立开放式运动控制器的厂家,推出了一些通用的运动控制器。如固高的GT系列运动控制器、摩信的MCT8000系列运动控制器;长沙力鼎科技有限公司的MC系列3轴模拟电压控制/编码器反馈型运动控制器,4轴有/无反馈脉冲输出型运动控制器;南京顺康数码科技有限公司的MC6014A使用了带插补功能、可以控制4个电机的DSP运动控制芯片,适用于PC机ISA总线的线路板;成都步进机电有限公司的MPC01和MPC02系列3轴步进或数字式伺服控制运动控制器。
第2章 控制系统描述方式及建模方法 (1)数学模型 一个实际的系统针对所控的变量经一定的合理的假设就变成了物理模型,再根据物理定律和机械定律等进行推导就得到了数学模型。 数学模型只能对某些特定的输入响应,故它不能包含实际系统对输入响应的全部真实的信息,且数学模型是实际系统的简化,所以在建模时就有很大学问。 太复杂和精细的模型可能包含难于估计的参数,也不便于分析。过于简单的模型不能描述系统的重要性能。这就需要我们在建模时掌握好复杂和简单的度,作合理的折中。 (2)仿真数学模型 建立数学模型意味着在计算机上建立起对象的可以计算的模型。 一般来说,系统的数学模型都必须改写成适合于计算机处理的形式才能使用,这种模型被称为仿真数学模型。 (3)仿真模型分类 数学模型分为静态模型和动态模型,前者主要用于系统的静态误差分析。动态模型又分为连续模型(用微分方程表述)和离散模型(用差分方程表述)。 系统的数学模型还可按目的分为三大类,即 1)用来帮助对象设计和操作的模型; 2)用来帮助控制系统设计和操作的模型; 3)用来系统仿真的模型。 本书主要研究后两种情况。 2.1 控制系统描述方式 控制系统主要有如下6种系统描述方式: (1)微分方程(组) (状态空间) 这种方法比较直观,特别是借助于计算机,可以迅速而准确地求得结果。但是,如果系统结构形式改变,便需要重新列写并求解微分方程,因此不便于对系统进行分析和设计。 典型的状态方程如式(2-1-1)所示。 Du CX Y Bu AX X +=+=& (2-1-1) (2)传递函数 运用拉氏变换求解系统的线性常微分方程,可以得到系统在复数域的数学模型,称其为传递函数。传递函数不仅可以表征系统的动态特性,而且可借以研究系统的结构或参数变化对系统性能的影响。 在经典控制理论中广泛应用的频率法和根轨迹法,就是在传递函数基础上建立起来的。因此,传递函数是经典控制理论中最基本也是最重要的概念。