ICSP’04Proceedings
ResearchofDriveControlSysteminElectricVehiclebasedon
DSP
LitIQuanZhon8YiZhouZude
fscllooIoflnlbnnationEngineering.WuhanUniversityoftechnology,WuhanChina430070)
E-mail:。z。h。.o..n...m,.a..e.t..(茄。,..o..u..b...1.i.c....w.——h——.—h——b—一.on
AbsUactBecatlselbregroundot"ElectricVehicledevelopmentbectnllesbrightfutureii|orcandmoreandtechniquethatcorrelatestoitsc‘,11tlnaotlsilnprovenleBtsinstep.DSP?basedDrive
ContmlmstemofEVvailengendermajoreconomicaIvaluemidsoeietyefibcl13litIntroducesresearchofDiroctTorqueCotltrOI(DTC)speedcontrolsvstemwhichwillapplytoTM¥320F2407DSPwhichbasedEVdr;vecentrelsystem,andcarriasonsomeresearchofttspert'ornlanceatlowspeedespecially141
Keywords;SignalProcessor(DSPjDirectTorqueControl(DTC)ElectricVehicle(EV)DriveCentrelSystem
1.Introduction
DirectTorqueConta'ol(DTCltechnologycalculatesand
controlsACmotortorquedirectlywithanalyzingwaysof
spacevectorsundel’statorCOOrcIination,generates
PWM
(PLtlseWidthmodify)signalswithdiscretetwospots
modulation(Band—BandContr01)byusingstatormagnetic
fielddirectionandtakedirectedcentrelonswitchstateof
ln~ellOl’optimall?inordertoobtainhighlydynanuc
pclforrnanceofltstol-quef1JItomitscomplexvectortransformandsimplie'ingoparationofmotormathematicalmodel,hasnotgeneralPWMsignalgeneratorItisakindofACspeed
controlwaywithhighlystatic-dynamicperformanceIn
addilianDTCadoptstablequerymodeofswitchstatefor
confirmingswitchstateofACmotor,whichmakescontrol
m‘stemStlalCtUl℃simplifyandrealizeentiredigitalization
easily…AssoonasDTCwassupported,itgotgreatattentionatlargescaleanddevelopedrapidlyforitsnovelcontrolidea,simplifiedsystemstructureandfined
performanceAtpresent,thennnlberoftrolleysandelectriccaginewithDTCsvstem
ofthusedb、ABBCompanyismorethan1000.“1
2.ElectricVehicle(EV)controlsystemtheorywithDTC
Fhehardx、1areofEVdlivecontrolsystemismadeof
strongpowerandlightpowerpartItoftenneedstocombinewithⅫfftwaredesignduringthedesignof掣stemhardwareso
‘0。’1。。7。。‘8’。’0’。3‘’。-。。8。。4。。。0。‘。6。。。-。。7。。/。。0。。。4。。/。。¥。。。2。。。0。。’.。0。‘。0。’。@。。。。‘。2‘。。0。。。0。。。4。。。。I。。E。+。E。’—E—.manydemandsandsolutionsarebroughtforwardTherearealotofproblemsandcorresponsivesettlementsadditionally
&wingrealizingproductionsAllofabovewillbediscussedinthispaper
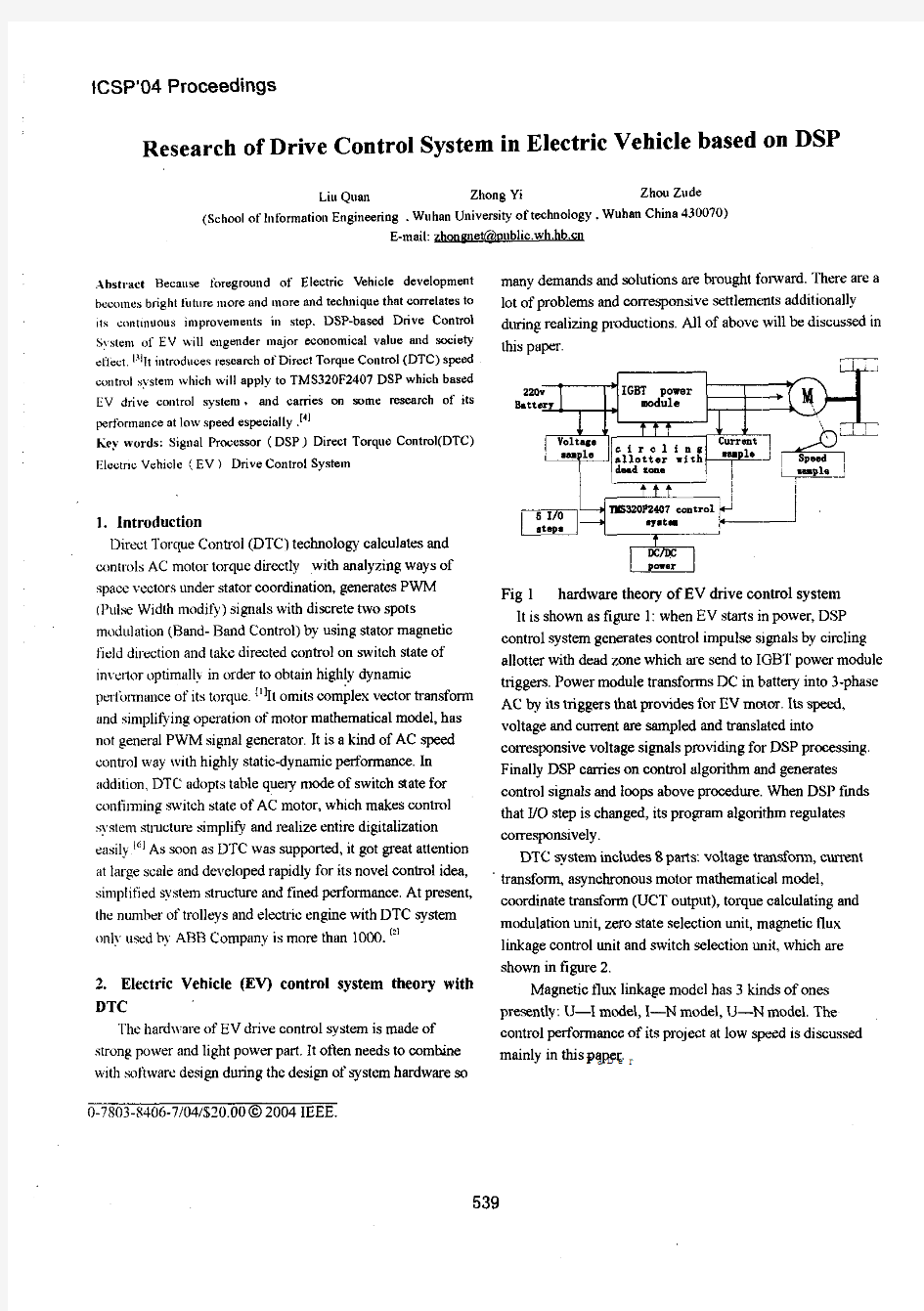
FiglhardwaretheoryofEVdrivecontrolsystemItlsshewnasfigurelwhenEVstartsinpower,DSP
controlsystemgeneratescontrolimpulsesignalsbycircling
allotterwithdeadzonewhieharcsendto10BTpowermeduletriggersPowermodule
transformsDCinbatteryinto3-phaseAC_byitstriggersthatprovidesforEVmotorItsspeed,
voltageandcurrentarcsampledandtranslatedinto
corresponsivevoltagesignalsprovidingtotDSPprocessing
FinallyDSPcarriesoncontrolalgorithm
andgenerates
controlsignalsandloopsaboveprocedureWhenDSPfmdsthatYOstepischanged,itsprogramalgorithmregulates
corresponsively
DTCsystemineludes8paris:voltagetrlmsform.cml'ent
transform,asynchronousmotormathematicslmodel,
coordinatetransform(UCToutput),torquecalculatingand
modulationunit,zerostateselectionunit,magneticflux
linkagecontrolunitandswitchselectionunit,whichare
showninfigure2
Magneticfluxlinkagemodelhas3kindsofones
presently:U—_I
model.I刈medel.U划modelThe
controlperformanceofitsprojectatlowspeedisdiscussed
mainlylnthisPaDer
Fi92softwaretheory.ofEVdrivecontrolsystearU一|modellsthesimplestandcommonestone迅those
onesAthi8hswea.becausetheinfluenceofstatorresistancelsvcrv
small.controlprecisionisfinerelativelyButthe
influence。l’stalorresistancemaditseul'remch蟛ng鲢lOWspeed.controlen∞rwillbelargerbyitschange,
l—粕modelresolvesmainlythefacingproblemofU—4
modelattowspeed,useswithrotorre,stance,rotorleakageinductanceandrotorspeed:sothismodelisappliedatlow
speedButtherearetoomanyparametersfileused,control
en蛩rwillbemoreobvious.
U—Nmodelcombineswithadvantagesofabovetwo
models。andrealizetoswitch5mloothtyatthesametime.1—_Nmodelisadoptedatmiddlespeed.but目modelis
transmittednaturallyathighspeedThiskindofmodelis
complexandisthet_esearehfocuslnfllispaper
3.MiddleSpeedControlMod《lofDTCControlSystem
Atmiddlespeed,statorfluxlinkageisdeterminedby
fomaulsl:
eAO=睡。,一j,驻冰:)dt(1)
Here,RsismotorstatorresistanceBythisway,themeritisthattheonlymotorpmmeterisRwhich㈨beensuredeasilyduringthecalculatingprocessStatorvoltageUs(t)andstatorcun'antIs(t)arealsophysinaiparameterswhichcallberesolvedeasilyinthisformula强js蕞聪ofway攮鞋enslIreSstatolfluxlinkagebystatol’voltageandstatorcurrentis
namedasl卜Ireedel
ExperimentResultsandAnalysis:
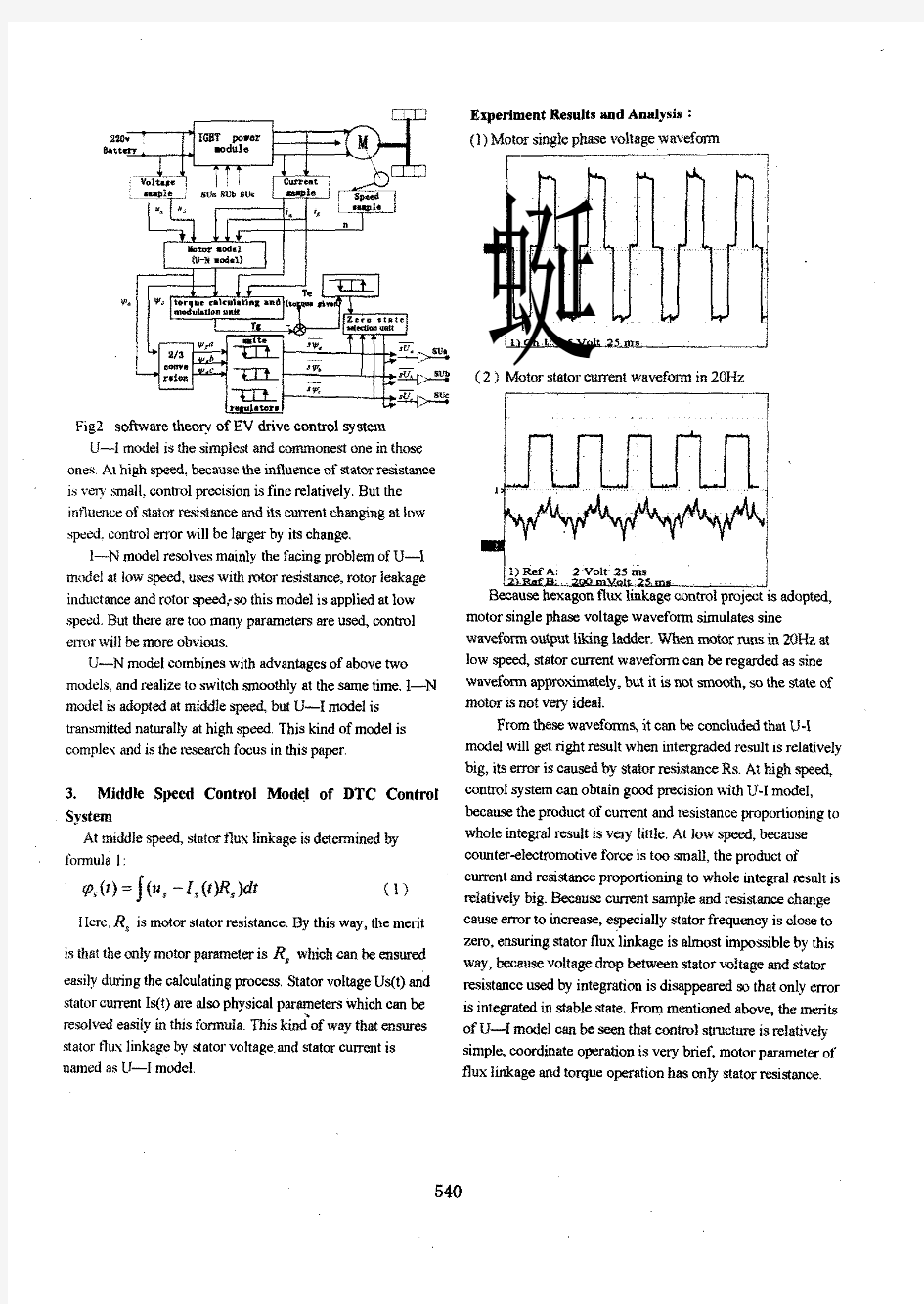
(1)Motorsinglephasevoltagewaveform
(2,MotorstatornulTentwaveform通20Hz
Becausehexagonfluxlinkagecontrolprojactisadopted,motorsinglephiLsevoltagewaveformsimulatessine
wavefbrmoutputlikingladder.Whenmotormllsin20Hz髓lowspeed,statorcurrentwaveformCanberegardedflssine
waveformapprox.imateiy,butitisnotsmooth,sothestateofmotorisnotveryideal
Fromthesewaveforms,itcanbeeoacladedthatU*I
modalwillgetri#tresultwhenintergradedresultisrelativelybig,淞wiscau∞dbystatorresistanceRsAthi垂speed,
controlsystemoanobtaingoodprecisionwithU-ImodeI、
becausetheproductofcurrentandresistancepmportioningtowholeintegralresultisverylittleAtlowspeed,because
counter-electromotiveforceistoo.q'nall,theproductof
currentandresistanceproportioningtowholeintegralresultisrelativelybig.Becausecurrentsamplea翻resistancechangecauseelTortoincrease,especiallystatorfrequencyisclosetozero,ensuringstatorfluxlinkageisalmostimpossiblebythisway,b∞ausevoltagedropbetweenstatorvoltageandstatorresistanceusedbyintegrationisdisappearedsothatonlyerrorisintegratedinstablestate+Frommentionedabove,themeritsof臻0modelcallbeseenthatcontrolstructureisrelativelysimple,coordinateoperationisverybrief,motorparameteroffluxlinkageandtorqueoperationhasonlystatorresistance
1…州J一肘一~~一一眦搿一一肿一蜒
Sothis
controlproieCtdependsonmotorparameterlittleand
itsrobustnessisvet,
.'yniceMoreoverbecausestatortlux
linkagedirectionalcontrol
isadopted,dynamicresponse
1s
vei'、fastHowever,itsshortcomingisthatZerostatelasttime
wlIlbet(’0longatlowspeed,voltagedropofsuitorflux
linkagemakesitsshapedeflect,SOfundamentalwave
amplitudefalls.whichmakes
SOmeinfluence
on
control
sVslemBecausefluxlinkageshapeofthiscontrolsystemIS
hexagon.its
inlluenceof
eUlTent
harmonic
on
EVbattery
can
not
beignolcd
4.A¨.SpeedControlModelofDTCControlSystem
U—N
all,speedmodeladoptsthatitobtainsstatorflux
linkageby
stator
voltageandspeedItcombineswithU—Imodel
and
I—N
modeltraitsInputofU—Nmodelisstator
voltageandsDeodsignalSO
asto
obtainothermotor
parametcra
SoU_NmodeliSalsoealledmotormodel,it
simulateseverymotorphysicalparametersverywell
Motor
in【xtelnotonlycombineswith
U—I
modelandI—_Nmodel
merits.butalsoi.esotvesswitchproblemnaturallyAthigh
speed.motor
model
worksin
U—Imodel。flux
linkageinfact
lS
obtainedbystatorvoltageandmatoronlTentBecauseof
statoJ‘resistance,rotate
speed
error
andfluxlinkage
error
causedbymotorparametershave
no
meaninginthisscopeAt
Iov。rspeed.motormodelworksinI--Nmodel,because
of
currentviewfinderandPI
adjustoraction.itCanreviseand
acliust
stator
resistance
error
to
reachgood
dynamic
performance.SOitrealize
slidingmodecontrolofmotoralL-
speed
ptoiect
541
Fig3statorfluxlinkage
I州all-speedmodel(motor
moden
R。to,。quat。。。:以:霉羔(∥一y,)+,缈∥,
(2)
Ld
Statorequation:驴=“。一i。+R。
(3)
Fluxlinkageequation:少=Li,y,=缈一L口i,
(4)
Here,妒,ismotor
rotorflux
linkage’“』ismotorstator
Voltase,’R,,smotor
stator
resistance,鲁i8
rotortime
constantFromfourformulasabove.motorU—_NmodelCan
be
set
up,andismadeoftwochannels(dchannel’p
channel),itsexpressionsareinducedthat:
忆=%一(‘+吖。比
(5)
儿:晏k一%)一m%
(6)
=小(-+爿毗]
虬=‘一‘
蛐M卜,+等缸,)]
n=”,一(‘+肼,)R
审、p=莩bp—v。^+。p、。
。=*旧)一%]
,5/p=i,一‘
州=。卜,+等扣)]
ExperimentResultsandAnalysis
(3)Statorcurrantandvoltagewavetbrmswhenlowphase
switches
to
middlephase
.j|]r1一nn—f].几厂]n.『_
7\/、/\^.烈ooW
"
””
∽…
㈣㈨
㈧
(4)Stshn‘cHrrentandvoltagewaveformswhenmiddlephasen~itchestohighphase:
respon∞isveD'fast:itsstateswitchisqmtesmooth,andhasnotan)disturbanceandflnctuate,soitreachesthepurposeofslidingmodecoutr01whenlnotorswitchesfrom25}也to35Hzand20Hzto55}乜Inaddition.fromexperimentresults.itcanbesecnthatnlotolstatorCUl'rentlsalmostsinewaveformat
highspeed,somotorworkingstateispreferablefinally
(5)StatolCUlTentwavefofmwithU—_Nall-印eedmodelin
12Hzatlowspeed:
FromthiswovetoITn.1tcanbeseenthatmotorcallrun
stabh'lnlowfrequencybecauseofcurrentviewfinderandPIacliustolaction,statorcun'entwaveformissmoothing
obviously.hasnotquitepinnacledisturbaneeandissinewaveapproximately,soitsperformancegetmoreimprovementat
lowspeedthantha“nU—Imc,del
5.Conclusion
Atpresent、EVcontrol"systemrealizesnotonlyphase
contml(10w.middle,high,nop,anti,fivephases),butalso
steplessspeedcontrol,andobtainsgoodstatic-dynamiceffectDTCpmj∞thasdevelopedinOeFmauformorethanten
years.whosetorqueperformanceatlowspeedandhi【ghel"
harmonicoperationallimprovedparticularly,anditisappliedtoprtvductionNowDTCisappliedtohigh-powerelectric
locomotive.undeagmund,trolleyearandmaindrivesystemofEVwidelyForexample,hi曲speedtrainwhichcrosses
EnglishChanneladoptsthisconu-olsystemEAEE
staffroomofRuhrUniversityinGermanalwayskeepsaheadInthis
field,andtheycontinuetodeepenthisresearchwhichmainlyisonsuchthreeaspects:
l?Theapplicationofnon—velocitysensor
2?Theapplicationofmedium-littlepowerIGBTfrequencyconverteronall-speedISRcontrolpmioc{
3‘neapplicationofhugepowersystembythreespotsfrequencyconverterforreducingelectricnetworkhmmonicPresentlyDTCresearchisjustonemulatingandexperimentphaseinourcountry.therearcstillmanyproblemsofcontrolperformanceandapplicationwaitingtoresolvetSl
Acknowledgements
Thispaperispartiallysupportedby:ChinaHumanNSF#03JJYl012,HtmlanNSF#03JJYl012andMinistry.of
educationScienceandTechnologyFoundation#03120
References
lPekkaTiitnen.DirectTorqueContolfDTC)一theNextGeneration.TransContolsvstemsandSoftware.Mavl995
2MikaAaltonen.DirectTorqueControlofACMotorDrives.TransABBReview,Mar.1995.ppl9.24
3ZhouZude.LiuQuanStudyofDetectingImpactDamageforCompositeMaterialBasedonIntelligentSellsorJourualofW、111allUniversityofTechnologv2002,l
4LiuQuan,XuChaoSophisticatedDigitalSystemVirtualLabBasedonEmbeddedStructureProceedingsofthe8”JointInternationalComputerConfelcncc2002.1l
5ITakahashi,andT.Noguchi.”Takea100kbackupon
thepastdecadeofdirecttorqueoontrolofinducfion
motors”.Proceedingsofthe1997IndustrialElectronics
Society,MmualMeetingConference.V01.2.1997.PP546—55l
6MDepenbrook.”Directself-controlfDSC)ofinverter.
fedinductionmotor”,IEEETransonPE.3.No4.Oct
1988.PP420-429