人工神经网络在地震预报中的应用
关键词:人工神经网络,地震预测,BP算法
地震预报主要是通过以下两种途径进行探索 :
一是关于孕震过程和地震模式的理论和实验研究。孕震过程的研究包括地震力学、震源物理等方面的理论、观测和实验研究,试图通过对震源过程物理力学机制的研究,逐步揭示和掌握地震孕育、发展和发生的规律,从而实现地震预报的目标。地震模式的研究是从一定的理论前提出发,提出地震发生的模式,从理论上推导各种可能的前兆及不同的关联组合,并通过实际观测不断检验和修改理论模式。
二是根据在长期实践中积累的大量震例资料,总结出经验性规律并推广应用于地震预测。通过对前兆资料的整理研究,分析总结出地震不同孕育阶段异常变化的时间、空间、强度和频度特征及其与未来地震三要素的关系,建立统计性和经验性的预报判据、指标和方法,并在预报实践中不断检验和改进。
误差反传播(ErrorBack Propagation)算法:BP算法
BP算法是误差反传播算法重要的组成部分。本章将针对于BP算法相关内容做出全面分析:近年来,BP网络在我国突飞猛进的发展,并在较短的时间内遍及各领域,如图像识别、预测预估、数据压缩、语声变换、自动控制以及模式辨识等。据有效统计显示,截止现阶段,我国应用BP算法的神经网络已达到80%,为此,实现BP算法在地震预报中的应用,将能够取得良好的成效。
BP算法的学习过程由信号的正向传播和误差的逆向传播两个过程组成。信号的正向传播步骤为:输入样本→输入层→各隐层(处理)→输出层;误差的反向传播步骤为:输出误差(某种形式)→隐层(逐层)→输入层。同时,BP算法的实现步骤为:初始化→输入训练样本对,计算各层输出→计算网络输出误差→计算各层误差信号→调整各层权值→检查网络总误差是否达到精度要求。信号的正向传播和误差的逆向传播的各层权值调整过程是周而复始进行的,而权值调整过程实质上为神经网络学习的过程,该过程需进行到将网络输出的误差减少到可接受的程度为止。
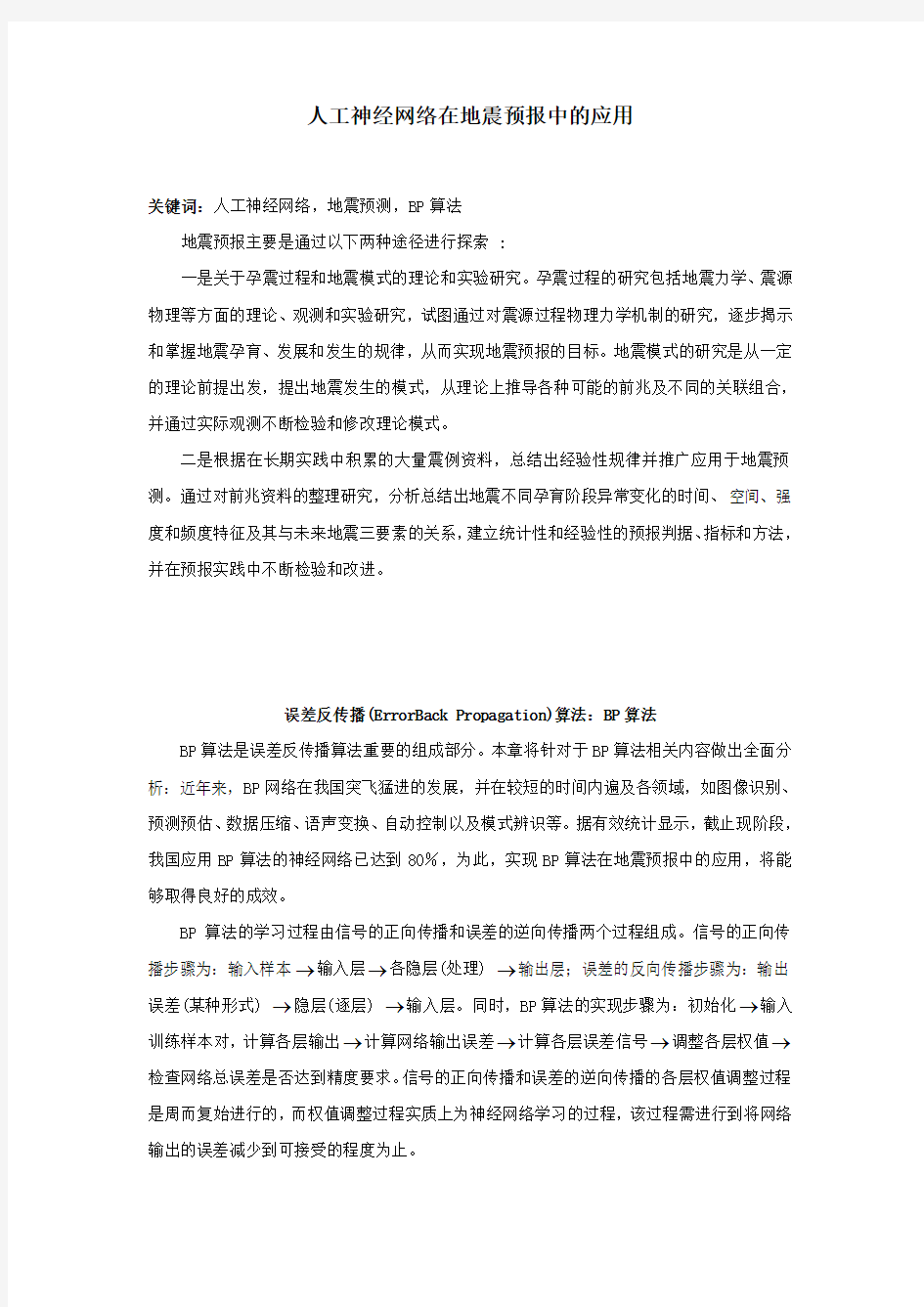
每组数据有6个项目作为输入,目的是预测震级,因此选择输入层为6个节点,输出层为1个节点,隐层节点采用几何金字塔规则确定为2个。因为单极性Sigmoid 函数
()()1/1g s e s s λ=+-可使同一网络既能处理小信号,也能处理大信号,所以作为转换函
数。
累计误差BP 算法的具体步骤:
先给出P 个训练对()()()
11,,,i i p p X T X T X T ??????。 1)预置较小的随机权矩阵。
2)施输入模式以于网络,计算各层的输入:
()()()1ji ii
j Y s f W s Y s ??=-??
其中,()j Y s 为s 层上第j 个神经元的输出值;()ji
W s 为s 一1层第i 个神经元至第s 层第j 个神经元的连接权。
3)修改权值:
()()
()()1ji ji
ti j W s W s t e s X η+=+
其中,置ti X 为该权值的输入信号;η为学习率;t 为学习次数;()j e s 为s 层第j 个神经元的误差。 对于中间层的神经元:
()()()()1k
i i j j e s X X e s W s k =-∑
对于实际输出:
()()()1i j j i j e s Y Y t y =--
其中,一为第j 个神经元的期望输出。 4)计算全局误差:
()21,2
j j P E t p y p E =
-=∑∑∑ 5)返回步骤2),向网络加下一个模式对,直到P 个模式对均循环一遍,再进行步骤6)。 6)若max E E < (预先设定值),则停止;否则,令E=0,返回步骤2)。
使用BP 神经网络对地震震级的预测
在实际地震预报中,前兆及地震学异常的时间和种类多少与未来地震震级大小有一定关系。但是异常与地震之间有较强的不确定性,同样一种预报方法或前兆在一些地震前可能异常很突出,但在另一些地震前则可能表现得很不明显甚至根本不出现。同样,一些异常出现后,其后也不一定发生较强地震。因此地震前的各类异常与未来地震的震级及发震时间之间具有较强的非线性关系,它们很难通过某种解析表达式进行表达。而神经网络是一种高度自适应的非线性动力系统,通过BP 神经网络学习可以得到输入与输出之间的高度非线性映射,因此使用BP 神经网络可以建立起输入与输出之间的非线性关系。本系统中用于地震震级预测的BP 神经网络的输入和输出神经元构成如下: 1 输入神经元(共15个神经元)
本系统选择在各次震例中出现次数相对多的14项异常的时间T(月)和异常数量N 作为输入神经元。其中有
(1)地震学异常时间i T :条带、空区、应变释放、地震频次、b 值、地震窗、波速比。 (2)前兆异常时间i T :短水准、地倾斜、地电、水氡、水位、应力、宏观。
由于一次地震前可能出现多台异常(j= 1,2,...,n),并且一项异常可能在孕震的不同段出现,因此当某项前兆异常有多台出现,可取其加权和为输入值
i T =,j ij j
t ω∑ j= 1,2,…,n (1)
式中tij 为某台站某项前兆异常的持续时间。如果某台的某项异常在中期、短期或临震3个阶段中都有异常(《中国震例》中算作3次),则取异常开始至发震的时间段为tij;如在2个阶段中有异常,则取其2个异常时段的时间之和为ij t ,j ω为权值, /
j ij ij
j
t t
ω=∑ (2)
宏观异常算1项。如果某项地震学或前兆异常时间过长(i t ≥5 a),可取i t = 5 a 。
(3)异常数量N 为某次地震前所出现的所有地震学和前兆异常项目之和。其异常种类 应包括上述输入单元以外的其他各类异常,同一异常在不同阶段都出现时算作1项。 2 输出神经元(1个)
即为实际地震震级i M 。 3 BP 神经网络对震级的学习与检验
表1、表2分别为30个学习样本和15个检验样本的数据以及外推检验情况。通过学习得到BP 神经网络的权值文件后,再对学习样本和待检验样本进行内符和外推检验。可以看
到神经网络能完全正确地识别这30个学习样本,利用BP 神经网络得到的最大计算震级与实际震级之差为M ?=0.1,内符检验正确率为100%。
如果对其他的15个待检验样本进行判别,可以看到利用BP 神经网络得到的所有最大计算震级与实际震级之差M ?≤0.5,其中13次震例的误差都小于0.25。若取M ?≤0.5时为预报正确,那么震级的报准率为100%,其预报效果十分理想。
表 神经网络研究异常与震级的关系的学习样本及内符检验结果(地震异常时间单位:月)
1BP 地震窗波速比短水准地倾斜
地电水氡水位应力宏观
地震序列条带空区释放频次
b 值应变地震地震数量检验震级实际异常震级
123456789101112131415
16
1718
192021222324252627282930
47
5.313.2397.1113.5 4.618.311.2 1.11.18.1
12.20.8 3.1
2.1
5.17.40.40.2
00.33.20.13.10.33.1 2.10.11.411
210567 5.3
5.25.95.35.45.4 5.30
5.155.905.405.415.471210.20
9.23.100
00
00
00
6060000058.41200
36240
0000
02.1166.119.30.10.27.80.5 5.5
100.81.11.60.710.36.500.100.11.7
0.6 4.0 1.10.20.10.1
988128 6.05.55.05.85.8 5.955.505.005.795.790000000
000
00
00000
00
0000000000000000
000
00
00000000000000
00
00161530167
18106558118720106911 6.95.85.26.06.05.26.06.85.05.45.45.35.96.76.2
7.27.87.66.3 6.307.587.827.216.206.705.885.315.315.405.026.806.025.195.996.025.205.776.896016.237.621.632.519.912.257605543.5
21
205.666022
21.51529.636326036.246.624
12.0112.26012.260
5.119.160
358.915.46.5
11.216.1106050.311.34.522.710.2605.139.833.5 4.539.524.447.753.87.516.2 5.13.620.724.413.28.4 1.19.80.24.20.212.2 2.922.4
36.07.38.92.99.4
6011.8
2.822.314.516.9
27.28.2
11.29.150.50.112.21.611.27.67.010.436.710.2110.10.22.1
2.62.1
2.60.10.10.2
24.415.36.10.612.20.53.99.224.422.014.31.90.16.26.5 1.814.2 3.35.2140.4 5.30.70.315.50.10.1
0.2400000
0000000
00000000
00000000030
000000000000000
00000000000000000000000
000
000000000
00
0000
0000000000
0000000
00
00000000000000
000
00000000
注:地震序号1、为1976年4月6日和林格尔地震2、1976年5月29日龙陵地震;3、1976年7月28日唐山地震;4、1976年8月16日松潘地震;5、1976年9月23日巴音木仁地震;6、1976年11月7日宁蒗地震;7、1978年5月18日营口地震;8、1978年5月19日下关地震;9、1978年7月13日黑水地震;10、1978年8月10日平潭地震;11、1979年3月2日固镇地震;12、1979年3月15日普洱地震;13、1979年3月29日库车地震;14、1979年6月19日介休地震;15、1979年7月9日溧阳地震;16、1979年8月25日五原地震;17、1980年4月18日天峻地震;18、1980年11月6日玛纳斯地震;19、1981年1月24日道孚地震;20、1981年8月13日丰镇地震;21、1981年11月9日隆尧地震;22、1982年2月25日龙南地震;23、1982年4月14日海原地震;24、1982年6月16日甘孜地震;25、1982年7
月3日剑川地震;26、1983年3月3日呼图壁地震;27、1983年6月1日阜康地震;28、1983年11月7日菏泽地震;29、1983年12月15日和静地震;30、1984年1月6日武威地震。
地震窗波速比短水准地倾斜
地电水氡水位应力宏观
地震序列条带空区释放频次
b 值应变地震地震表 神经网络研究异常与震级关系的检验样本及外推检验结果(地震异常时间单位:月)
2BP 数量检验震级实际异常123456789101112
131415024.734.43020.300028.39.56060000
15.9000
810.902
00009.636.5482360601
14.410.11.566019.329.1
28.53,723,314.214.223.147.9 2.70.1
9.12.414.91.30.70.613.61.00.98.118.91.3
4.81.33.0
0.30.821.3 1.1
4.9 1.40.1
0.36
12 5.3
5.79
6.495.496.395.065.625.055.426.066.776.35.36.25.16.05.05.46.36.981955675100.60.40.10.52.43.110.80.50.10.50.511.63.613.623.6 3.4 6.46039.51
7.4 1.617.520.57.3
11.27.4
15.5
2.5230.4
3.20.30.174106174 5.37.36.27.15.5 5.386.936.417.495.34000
000000
000
00000
000
00
00000000000000000000
000000
000
00
0000000
0000000000000000000000000000000
00000000震级
注:地震序号1、为1974年4月22日溧阳地震2、1974年5月11日永善地震;3、1975年1月15日康定地震;4、1975年2月4日海城地震;5、1975年9月2日郎家沙地震;6、1976年11月15日宁河地震;7、1977年5月12日宁河地震;8、1977年7月23日库车地震;9、1997年10月19日平果地震;10、1977年12月19日伽师地震;11、1984年2月17日祁连地震;12、1984年5月21日南黄海地震;13、1984年11月23日灵武地震;14、1985年4月18日禄劝地震;15、1985年9月2日建水地震。
SOM 自组织神经网络
SOM 网络结构
SOM 网络为输入层和竞争层(输出层)的双层结构[]49,其竞争层可以在一维或二维网络矩阵上,形成输入信号的特征拓扑分布,从而实现提取输入信号模式特征的能力。其网络模型通常由处理单元矩阵、比较选择机制、局部互连作用和自适应过程四个部分组成。
SOM 网络中神经元以一维或二维形式为主,但也可以是多维形式。图3.6所示为二维网络结构,输入层有P 个输入节点,竞争层上的q 个输出节点按二维形式构成一个节点矩阵,所有输入节点和输出节点之间都有权值连接,并且竞争层上的输出节点之间也可能是局部互连的。
竞争层
输入层
图.网络结构
36S O M
若设定P 是输入向量,k W 是输出神经元k 与网络输入层之间的连接权值,么神经元k 的输
k k W T P = (3.2)
依据“赢者通吃”的竞争机制,可以得到网络实际具有响应的输出单元i 输出为:
{}max k k
Ti t = (3.3)
对式3.2和3.3进行修正,得到:
()k k i k
i k
T r t
t k s σ?=+
-∈∑ , 1
m
k kl l l w p ?==∑, {}max k k
Ti t ε=- , (3.4)
式中的o(x)是非线性函数,即
(3.5)
k s 是与输出神经元k 有关的处理单元集合,i r 是与横向连接及权值有关的数,kl w 是输
出与输入神经元(即k 与1)的连接权值,l p 是输入神经元l 的输,ε是一个很小的正数,i t 为浮动阈值函数。 SOM 网络学习算法
SOM 网络学习算法[]50能够自动计算出输入数据之间的相似度,并将类似的输入数据在网络上就近分配,具体步骤如下:
(1)网络初始化。使用随机数设定输入层和竞争层的连接权值的初始值。
(2)将输入向量P 导入到网络输入层。
(3)计算输入向量与竞争层每个神经元的权值向量之间的距离,即欧氏距离
j d :
j d =
.6)
其中,ij W 为输入层的i 神经元与竞争层的.j 神经元之间的权值。
(4)选择输入向量与权值向量距离最小的神经元。从公式3.6计算的结果中选择出一个具有最小距离的神经元,若j d 为最小,则称其为胜出神经元,记为j*,并给出j*的“邻接神经元”集合。
(5)权值的学习。依据式3.7更新j ‘和其“邻接神经元”的权值:
()(),*ij i ij W h j j P W η?=- (3.7)
其中,η是一个取值为[]0,1的常数。 h(j ,j*)为邻域函数,可用3.8式表示:
()2
2*,*exp j j h j j σ??
-= -
? ???
(3.8) 2σ会随着学习过程而减小。因此,学习过程是从粗调向微调变化的过程,邻域函数可以产生有效的映射。
(6)是否达到预先设定的要求。若达到要求则结束算法,否则返回步骤2,提供新的样本重复上述学习过程。
参考文献
[1]项月文 .基于SOM自组织神经网络的地震预报技术研究[D].南昌:南昌大学,2012-12-18
[2]王炜. BP神经网络在地震综合预报中的应用[J]. 地震,1994,19(2):( 118~126)
[3]姜金征. 人工神经网络在地震预测中的应用[J]. 山西建筑,2013,39(1):(21~22)
[4]蒋淳. 神经网络模型在地震预报中的某些应用[J].中国地震,1994,10(3):(262~269)
[5]陈以.组合人工神经网络在地震预测中的应用研究[J].计算机仿真,2011,28(1):(190~193)
[6]杜兴信. 人工神经网络方法在地震预报中的初步应用[J].华南地震,1994,14(2):(11~16)
[7]李东升. 人工神经网络及其在地震预报中的应用[J].地震,1995,(4):(379~383)
[8]刘舜奎.人工神经网络在地震分析预报中的应用[J].厦门大学学报,1999,38(4):(534~540)
[9]蔡煜东. 人工神经网络在地震综合预报中的应用[J].地震学报,1993,15(2): (257~260)
[10]王炜. 人工神经网络在地震中短期预报中的应用[J].中国地震,2000,16(2):(149~157)
[11]温岩. 基于MA TLAB工具箱的神经网络在地震预报中的应用[J].东北地震研究,2001,17(3):(36~41)
人工神经网络原理及实际应用 摘要:本文就主要讲述一下神经网络的基本原理,特别是BP神经网络原理,以及它在实际工程中的应用。 关键词:神经网络、BP算法、鲁棒自适应控制、Smith-PID 本世纪初,科学家们就一直探究大脑构筑函数和思维运行机理。特别是近二十年来。对大脑有关的感觉器官的仿生做了不少工作,人脑含有数亿个神经元,并以特殊的复杂形式组成在一起,它能够在“计算"某些问题(如难以用数学描述或非确定性问题等)时,比目前最快的计算机还要快许多倍。大脑的信号传导速度要比电子元件的信号传导要慢百万倍,然而,大脑的信息处理速度比电子元件的处理速度快许多倍,因此科学家推测大脑的信息处理方式和思维方式是非常复杂的,是一个复杂并行信息处理系统。1943年Macullocu和Pitts融合了生物物理学和数学提出了第一个神经元模型。从这以后,人工神经网络经历了发展,停滞,再发展的过程,时至今日发展正走向成熟,在广泛领域得到了令人鼓舞的应用成果。本文就主要讲述一下神经网络的原理,特别是BP神经网络原理,以及它在实际中的应用。 1.神经网络的基本原理 因为人工神经网络是模拟人和动物的神经网络的某种结构和功能的模拟,所以要了解神经网络的工作原理,所以我们首先要了解生物神经元。其结构如下图所示: 从上图可看出生物神经元它包括,细胞体:由细胞核、细胞质与细胞膜组成;
轴突:是从细胞体向外伸出的细长部分,也就是神经纤维。轴突是神经细胞的输出端,通过它向外传出神经冲动;树突:是细胞体向外伸出的许多较短的树枝状分支。它们是细胞的输入端,接受来自其它神经元的冲动;突触:神经元之间相互连接的地方,既是神经末梢与树突相接触的交界面。 对于从同一树突先后传入的神经冲动,以及同一时间从不同树突输入的神经冲动,神经细胞均可加以综合处理,处理的结果可使细胞膜电位升高;当膜电位升高到一阀值(约40mV),细胞进入兴奋状态,产生神经冲动,并由轴突输出神经冲动;当输入的冲动减小,综合处理的结果使膜电位下降,当下降到阀值时。细胞进入抑制状态,此时无神经冲动输出。“兴奋”和“抑制”,神经细胞必呈其一。 突触界面具有脉冲/电位信号转换功能,即类似于D/A转换功能。沿轴突和树突传递的是等幅、恒宽、编码的离散电脉冲信号。细胞中膜电位是连续的模拟量。 神经冲动信号的传导速度在1~150m/s之间,随纤维的粗细,髓鞘的有无而不同。 神经细胞的重要特点是具有学习功能并有遗忘和疲劳效应。总之,随着对生物神经元的深入研究,揭示出神经元不是简单的双稳逻辑元件而是微型生物信息处理机制和控制机。 而神经网络的基本原理也就是对生物神经元进行尽可能的模拟,当然,以目前的理论水平,制造水平,和应用水平,还与人脑神经网络的有着很大的差别,它只是对人脑神经网络有选择的,单一的,简化的构造和性能模拟,从而形成了不同功能的,多种类型的,不同层次的神经网络模型。 2.BP神经网络 目前,再这一基本原理上已发展了几十种神经网络,例如Hopficld模型,Feldmann等的连接型网络模型,Hinton等的玻尔茨曼机模型,以及Rumelhart 等的多层感知机模型和Kohonen的自组织网络模型等等。在这众多神经网络模型中,应用最广泛的是多层感知机神经网络。 这里我们重点的讲述一下BP神经网络。多层感知机神经网络的研究始于50年代,但一直进展不大。直到1985年,Rumelhart等人提出了误差反向传递学习算法(即BP算),实现了Minsky的多层网络设想,其网络模型如下图所示。它可以分为输入层,影层(也叫中间层),和输出层,其中中间层可以是一层,也可以多层,看实际情况而定。
人工神经网络的发展与应用 神经网络发展 启蒙时期 启蒙时期开始于1980年美国著名心理学家W.James关于人脑结构与功能的研究,结束于1969年Minsky和Pape~发表的《感知器》(Perceptron)一书。早在1943年,心理学家McCulloch和数学家Pitts合作提出了形式神经元的数学模型(即M—P模型),该模型把神经细胞的动作描述为:1神经元的活动表现为兴奋或抑制的二值变化;2任何兴奋性突触有输入激励后,使神经元兴奋与神经元先前的动作状态无关;3任何抑制性突触有输入激励后,使神经元抑制;4突触的值不随时间改变;5突触从感知输入到传送出一个输出脉冲的延迟时问是0.5ms。可见,M—P模型是用逻辑的数学工具研究客观世界的事件在形式神经网络中的表述。现在来看M—P 模型尽管过于简单,而且其观点也并非完全正确,但是其理论有一定的贡献。因此,M—P模型被认为开创了神经科学理论研究的新时代。1949年,心理学家D.0.Hebb 提出了神经元之间突触联系强度可变的假设,并据此提出神经元的学习规则——Hebb规则,为神经网络的学习算法奠定了基础。1957年,计算机学家FrankRosenblatt提出了一种具有三层网络特性的神经网络结构,称为“感知器”(Perceptron),它是由阈值性神经元组成,试图模拟动物和人脑的感知学习能力,Rosenblatt认为信息被包含在相互连接或联合之中,而不是反映在拓扑结构的表示法中;另外,对于如何存储影响认知和行为的信息问题,他认为,存储的信息在神经网络系统内开始形成新的连接或传递链路后,新 的刺激将会通过这些新建立的链路自动地激活适当的响应部分,而不是要求任何识别或坚定他们的过程。1962年Widrow提出了自适应线性元件(Ada—line),它是连续取值的线性网络,主要用于自适应信号处理和自适应控制。 低潮期 人工智能的创始人之一Minkey和pape~经过数年研究,对以感知器为代表的网络系统的功能及其局限性从数学上做了深入的研究,于1969年出版了很有影响的《Perceptron)一书,该书提出了感知器不可能实现复杂的逻辑函数,这对当时的人工神经网络研究产生了极大的负面影响,从而使神经网络研究处于低潮时期。引起低潮的更重要的原因是:20世纪7O年代以来集成电路和微电子技术的迅猛发展,使传统的冯·诺伊曼型计算机进入发展的全盛时期,因此暂时掩盖了发展新型计算机和寻求新的神经网络的必要性和迫切性。但是在此时期,波士顿大学的S.Grossberg教授和赫尔辛基大学的Koho—nen教授,仍致力于神经网络的研究,分别提出了自适应共振理论(Adaptive Resonance Theory)和自组织特征映射模型(SOM)。以上开创性的研究成果和工作虽然未能引起当时人们的普遍重视,但其科学价值却不可磨灭,它们为神经网络的进一步发展奠定了基础。 复兴时期 20世纪80年代以来,由于以逻辑推理为基础的人工智能理论和冯·诺伊曼型计算机在处理诸如视觉、听觉、联想记忆等智能信息处理问题上受到挫折,促使人们
①保持良好的功能位:保持肢体处于良姿位,如仰卧时在背后垫一软枕,使患肢肩略向前, 手关节保持背屈,肘关节微屈曲,手臂稍上抬高于肩部水平;病侧卧位时患侧肩向前,患侧肘伸直,手指张开,掌面朝上,健侧下肢在前,病肢在后,屈膝,脚掌和小腿尽量保持垂直;健侧卧时患侧肩向前伸,肘伸直,患侧髋前伸,屈膝。 ②②被动及主动锻炼:包括肌肉按摩及各关节的活动,入院d1即开始给患肢进行肌肉按 摩,从偏瘫肢体的近端依次反复向远端轻捏肌肉,4~5次/d,20min/次;关节活动由大关节开始至小关节,依次做抬高、伸屈、内收、外展活动,2~3次/d;当瘫痪的肢体功能开始恢复时应鼓励患者增加主动运动,如两手握紧,健肢带动患肢抬高过头、放下,反复训练,逐日增加次数,或者下肢作拱桥位训练。 ③③步行训练:随着病情的好转,先进行床边坐位的训练,之后开始训练站立及步行锻炼, 先在原地踏步,走时宜缓慢,行走时还应养成正确的姿势。 脑血管病的康复是一个循序渐进,持之以恒的过程。患病后要抓住时机,病情稳定后宜尽早进行肢体功能锻炼。 下面介绍几种常用的肢体功能锻炼方法: 1. 床上卧位活动:两手握拳,手臂及下肢交替屈伸或抬起放下。 2. 床上半卧位活动:从床上借助外力(两侧床档或床尾链)坐起,除进行床上卧床活动外,还应增加上下肢撑床等抗阻力练习。 3. 床下半卧位活动:从床上坐起,借外力移于椅子上,作提腿。原地踏步动作。 4. 站立运动:从坐位转为主位,可扶床架或椅背站立,一腿提起片刻再换另一退提起。 5. 步行练习:开始可以扶床架或桌子行走,然后可拉手仗行走,最后逐渐摆脱辅助物行走。 6. 日常行为于精神动作锻炼:让患者自己穿脱衣裤,刷牙洗脸,刚开始可协助患者做,以后逐渐放手让患者单独去做,让患者多作一些摘菜、拨豆,串纸帘等精细动作的训练。 在进行肢体功能锻炼时要将患者的安全放在首位,必要时应有专人陪同,以保证病人的安全。 中风患者 2.3被动运动和主动运动①按摩:按摩应轻柔缓慢,对瘫痪肌予按摩揉捏,对拮抗 肌予安抚性按摩,可使其放松.②对偏瘫肢体关节做无痛范围内的屈,伸,内旋,外 展被动活动,先大关节,后小关节.作髋关节和肘关节活动时,注意手法柔和,活动 幅度不宜过大,应≤90..③翻身锻炼:协助,鼓励患者向健侧和患侧做翻身运动,逐渐从被动运动过渡到自主运动.④进行坐位,立位,步行,上下楼梯锻炼.在他人的
人工神经网络的发展及应用 西安邮电学院电信系樊宏西北电力设计院王勇日期:2005 1-21 1 人工神经网络的发展 1.1 人工神经网络基本理论 1.1.1 神经生物学基础生物神经系统可以简略地认为是以神经元为信号的处理单元,通过广泛的突触联系形成的信息处理集团,其物质结构基础和功能单元是脑神经细胞,即神经元(neuron) 。 (1)神经元具有信号的输人、整合、输出三种主要功能作用行为,结构如图1 所示: (2)突触是整个神经系统各单元间信号传递驿站,它构成各神经元之间广泛的联接。 (3)大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物,其变化是先天遗传信息确定的总框架下有限的自组织过程。 1.1.2 建模方法神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系,这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法:①神经生物学模型方法,即根据微观神经生物学知识的积累,把脑神经系统的结构及机理逐步解释清楚,在此基础上建立脑功能模型;②神 经计算模型方法,即首先建立粗略近似的数学模型并研究该模型的动力学特性,然后冉与真实对象作比较(仿真处理方法)。1.1.3 概
念人工神经网络用物理町实现系统采模仿人脑神经系统的结构和功能,是一门新兴的前沿交义学科,其概念以T.Kohonen.Pr 的论述 最具代表性:人工神经网络就是由简单的处理单元(通常为适应性神经元,模型见图2)组成的并行互联网络,它的组织能够模拟生物神 经系统对真实世界物体所作出的交互反应。 1.2 人工神经网络的发展 人工神经网络的研究始于40 年代初。半个世纪以来,经历了兴起、高潮与萧条、高潮及稳步发展的较为曲折的道路。1943 年,心理学家W.S.Mcculloch 和数理逻辑学家W.Pitts 提出了M—P 模型, 这是第一个用数理语言描述脑的信息处理过程的模型,虽然神经元的功能比较弱,但它为以后的研究工作提供了依据。1949 年,心理学家D. O. Hebb提出突触联系可变的假设,根据这一假设提出的学习规律为神经网络的学习算法奠定了基础。1957 年,计算机科学家Rosenblatt 提出了著名的感知机模型,它的模型包含了现代计算机的一些原理,是第一个完整的人工神经网络。1969 年,美国著名人工智能学者M.Minsky 和S.Papert 编写了影响很大的Perceptron 一书,从理论上证明单层感知机的能力有限,诸如不能解决异或问题,而且他们推测多层网络的感知能也不过如此,在这之后近10 年,神经网络研究进入了一个缓慢发展的萧条期。美国生物物理学家J.J.Hopfield 于1982年、1984 年在美国科学院院刊发表的两篇文章,有力地推动了神经网络的研究,引起了研究神经网络的
人工神经网络 系别:计算机工程系 班级: 1120543 班 学号: 13 号 姓名: 日期:2014年10月23日
人工神经网络 摘要:人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。在工程与学术界也常直接简称为神经网络或类神经网络。神经网络是一种运算模型,由大量的节点(或称神经元)之间相互联接构成,由大量处理单元互联组成的非线性、自适应信息处理系统。它是在现代神经科学研究成果的基础上提出的,试图通过模拟大脑神经网络处理、记忆信息的方式进行信息处理。 关键词:神经元;神经网络;人工神经网络;智能; 引言 人工神经网络的构筑理念是受到生物(人或其他动物)神经网络功能的运作启发而产生的。人工神经网络通常是通过一个基于数学统计学类型的学习方法(Learning Method )得以优化,所以人工神经网络也是数学统计学方法的一种实际应用,通过统计学的标准数学方法我们能够得到大量的可以用函数来表达的局部结构空间,另一方面在人工智能学的人工感知领域,我们通过数学统计学的应用可以来做人工感知方面的决定问题(也就是说通过统计学的方法,人工神经网络能够类似人一样具有简单的决定能力和简单的判断能力),这种方法比起正式的逻辑学推理演算更具有优势。 一、人工神经网络的基本原理 1-1神经细胞以及人工神经元的组成 神经系统的基本构造单元是神经细胞,也称神经元。它和人体中其他细胞的关键区别在于具有产生、处理和传递信号的功能。每个神经元都包括三个主要部分:细胞体、树突和轴突。树突的作用是向四方收集由其他神经细胞传来的信息,轴突的功能是传出从细胞体送来的信息。每个神经细胞所产生和传递的基本信息是兴奋或抑制。在两个神经细胞之间的相互接触点称为突触。简单神经元网络及其简化结构如图2-2所示。 从信息的传递过程来看,一个神经细胞的树突,在突触处从其他神经细胞接受信号。 这些信号可能是兴奋性的,也可能是抑制性的。所有树突接受到的信号都传到细胞体进行综合处理,如果在一个时间间隔内,某一细胞接受到的兴奋性信号量足够大,以致于使该细胞被激活,而产生一个脉冲信号。这个信号将沿着该细胞的轴突传送出去,并通过突触传给其他神经细胞.神经细胞通过突触的联接形成神经网络。 图1-1简单神经元网络及其简化结构图 (1)细胞体 (2)树突 (3)轴突 (4)突触
脑出血患者的功能锻炼 急性期以预防为主(1)保持肢体功能位置,取仰卧位时,瘫痪侧上肢垫高超过肩部,肘略弯曲,腕和手指轻度伸展,手握纱布卷,膝下放一小枕,腿外侧放沙袋以防腿外展、外旋;足底放置足板以防足下垂和外翻;随翻身变动体位为半仰卧位、侧卧位和半俯卧位。(2)被动体位:按关节活动范围进行被动运动,由健侧到患侧,由大关节到小关节循序渐进,对肘、指、踝关节活动要特别注意,因这些部位易发生强直,应多做运动。每次每个关节每个方向活动5?6下,每天3?5次。(3)按摩患侧肢体给予轻柔而有节奏的按摩使其放松,伸肌 则按摩与揉捏相结合,并按摩胸大肌,减轻其痉挛性收缩,以免妨碍肩关节运动,每天2次,每次 15?20 min。 恢复期以增强患肢的活动为主对患肢进行坐、立、行的训练及各种日常训练。当患者能自行翻身后,将训
练体位改为坐位,健手扶床,两腿下垂,增加脊柱和髋关节肌肉、韧带功能和坐位平衡能力。站立训练:先行辅助站立练习,后行床边站立练习,坚持循序渐进,防止肢体萎缩。行走训练:在患者站稳10?15 min而无疲劳时,即可开始步行锻炼。 日常生活训练对患者进行包括吃饭、穿衣、洗漱、如厕及室外活动等训练,帮助患者树立重新生活的信心。 心理护理脑出血患者的突然发病及其后遗症,给患者造成极大的心理创伤。急性期表现出焦虑、无能为力等心理问题,患者由健康变为瘫痪,这一变故使患者感到悲痛欲绝,甚至产生轻生的念头,部分患者由脑出血所致性格怪异,使家人难以接受。针对患者各种情绪反应可采用交谈笔记、手势辨认,充分了解其需求,告诉患者功能障碍经过积极锻炼是可以恢复的,增强其战胜疾病的信心。 附属陈村医院康复科【下载本文档,可以自由复制内
人工神经网络及其应用实例人工神经网络是在现代神经科学研究成果基础上提出的一种抽 象数学模型,它以某种简化、抽象和模拟的方式,反映了大脑功能的 若干基本特征,但并非其逼真的描写。 人工神经网络可概括定义为:由大量简单元件广泛互连而成的复 杂网络系统。所谓简单元件,即人工神经元,是指它可用电子元件、 光学元件等模拟,仅起简单的输入输出变换y = σ (x)的作用。下图是 3 中常用的元件类型: 线性元件:y = 0.3x,可用线性代数法分析,但是功能有限,现在已不太常用。 2 1.5 1 0.5 -0.5 -1 -1.5 -2 -6 -4 -2 0 2 4 6 连续型非线性元件:y = tanh(x),便于解析性计算及器件模拟,是当前研究的主要元件之一。
离散型非线性元件: y = ? 2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6 -4 -2 2 4 6 ?1, x ≥ 0 ?-1, x < 0 ,便于理论分析及阈值逻辑器件 实现,也是当前研究的主要元件之一。 2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6 -4 -2 2 4 6
每一神经元有许多输入、输出键,各神经元之间以连接键(又称 突触)相连,它决定神经元之间的连接强度(突触强度)和性质(兴 奋或抑制),即决定神经元间相互作用的强弱和正负,共有三种类型: 兴奋型连接、抑制型连接、无连接。这样,N个神经元(一般N很大)构成一个相互影响的复杂网络系统,通过调整网络参数,可使人工神 经网络具有所需要的特定功能,即学习、训练或自组织过程。一个简 单的人工神经网络结构图如下所示: 上图中,左侧为输入层(输入层的神经元个数由输入的维度决定),右侧为输出层(输出层的神经元个数由输出的维度决定),输入层与 输出层之间即为隐层。 输入层节点上的神经元接收外部环境的输入模式,并由它传递给 相连隐层上的各个神经元。隐层是神经元网络的内部处理层,这些神 经元在网络内部构成中间层,不直接与外部输入、输出打交道。人工 神经网络所具有的模式变换能力主要体现在隐层的神经元上。输出层 用于产生神经网络的输出模式。 多层神经网络结构中有代表性的有前向网络(BP网络)模型、
人工神经网络在蕨类植物生长中的应用 摘要:人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。根据此特点结合蕨类植物的生长过程进行了蕨类植物生长的模拟。结果表明,人工神经网络的模拟结果是完全符合蕨类植物的生长的,可有效的应用于蕨类植物的生长预测。 关键词:人工神经网络;蕨类植物;MATLAB应用 一人工神经网络的基本特征 1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。这特别适于实时控制和动态控制。各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。 2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。因此人工神经网络是一种具有高度非线性的超大规模连续时间动力学系统。 3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。作为神经元间连接键的突触,既是信号转换站,又是信息存储器。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。 4、具有联想存储功能:人的大脑是具有联想功能的。比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。用人工神经网络的反馈网络就可以实现这种联想。神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。 5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。 二人工神经网络的基本数学模型 神经元是神经网络操作的基本信息处理单位(图1)。神经元模型的三要素为: (1) 突触或联接,一般用,表尔神经元和神经元之间的联接强度,常称之为权值。 (2) 反映生物神经元时空整合功能的输入信号累加器。 图1 一个人工神经元(感知器)和一个生物神经元示意图 (3) 一个激活函数用于限制神经元输出(图2),可以是阶梯函数、线性或者是指数形式的
人工神经网络概述及其在分类中的应用举例 人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。人工神经网络是在对人脑组织结构和运行机智的认识理解基础之上模拟其结构和智能行为的一种工程系统。 神经网络在2个方面与人脑相似: (1) 人工神经网络获取的知识是从外界环境中学习得来的。 (2) 互连神经元的连接强度,即突触权值,用于存储获取的信息。他既是高度非线性动力学系统,又是自适应组织系统,可用来描述认知、决策及控制的智能行为。神经网络理论是巨量信息并行处理和大规模并行计算的基础。 一人工神经网络的基本特征 1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。这特别适于实时控制和动态控制。各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。 2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。因此人工神经网络是一
种具有高度非线性的超大规模连续时间动力学系统。 3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。作为神经元间连接键的突触,既是信号转换站,又是信息存储器。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。 4、具有联想存储功能:人的大脑是具有联想功能的。比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。用人工神经网络的反馈网络就可以实现这种联想。神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。 5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。 6、软件硬件的实现:人工神经网络不仅能够通过硬件而且可借助软件实现并行处理。近年来,一些超大规模集成电路的硬件实现已经问世,而且可从市场上购到,这使得神经网络具有快速和大规模处理能力的实现网络。许多软件都有提供了人工神经网络的工具箱(或软件包)如Matlab、Scilab、R、SAS等。 二人工神经网络的基本数学模型
偏瘫患者肢体康复方法之被动训练 根据瘫痪患者的病情,可分别进行被动运动、按摩运动、助力主动运动、主动运动和抗阻力运种。锻炼目的:增强患者肢体肌肉力量,恢复被损伤的运动功能,心肺功能,促进脑功能的恢复,防止瘫痪肢体的畸形和挛缩。 运动强度:开始运动时,要有医护人员或家属监护,运动时最高心率控制在每分钟100次以下。在恢复后期,根据病情与体能恢复情况,运动时最高心率可达到每分钟100~120 次。 运动种类与练习次数、时间:偏瘫患者的被动运动:一般在疾病急性发作后2周内严格卧床休息,减少活动。疾病急性期之后不再反复,患者肢体完全瘫痪或仅有微弱动作,即可进行被动的医疗体育活动。早期的被动运动是防止严重运动障碍与肌肉萎缩的重要手段。 患者仰卧位,在医务人员或家属的帮助下从大关节到小关节逐一进行上、下肢被动运动。 1.上肢被动运动: a.手指屈伸:帮助者一手握患者手背,另一手握患者手指做屈伸练习。
b.手指摇转:帮助者一手握患者手心,另一手握患者手指做摇转练习 c.上翻、下压手腕:帮助者一手握患者手腕上,另一手握患者手心,做手腕上翻、下压练习。 d.手腕摇转:帮助者握患者手腕上,另一手握患者手心,做手腕左右摇动与转动练习。 e.屈肘:帮助者一手握患者上臂,或上臂压在床上,使臂定位,另一手握患者手腕做肘部伸屈与旋转练习
f.肩部上抬、外展、内收:帮助者一手扶患者肩上(锁骨),一手握患者手腕,做肩部的上抬、外展、内收练习。 2.下肢被动运动: a.患者仰卧位,在医务人员或家属的帮助下进行下肢被动运动。 b.足趾前后与旋转活动:帮助者一手握患者足背,另一手握患者足趾,做足趾前后与旋转活动。
偏瘫肢体功能锻炼的健康教育八步操适用于脑卒中肢体偏瘫的早期康复护理,锻炼时遵循由近端到远端、由简到繁、由轻到重、活动范围由小到大、由单一关节到整个肢体、负荷由弱到强、时间由短到长、循序渐进、以患者能耐受为度,患者均为仰卧,呈功能体位,主要包括以下的锻炼步骤:(具体见图) 1、肩关节外展内旋上举式: 2、肘关节屈伸式? 3、腕关节掌屈指屈式? 4、手指关节屈曲伸直式?双手上举训练 5、髋关节屈曲伸直式 6、膝关节屈曲伸直式? 7、内外旋踝式 8、足趾关节外翻内翻法式 以上各动作缓慢尽力,每次重复运动10-15次,每次停3-5秒,收回呈起始位 肩关节:屈曲0°~90°、外展0°~90°、外旋0°~30° 肘关节:屈曲20°~120° 前臂:90°旋后位~中立位 ①上肢的关节活动度训练 A:肩关节的屈曲和外展 治疗者一手握住患侧上肢做肩关节的屈曲和外展运动,另一侧手固定肩关节加以保护。 B:肩关节的内旋和外旋 治疗者一手固定肱骨近端,另一手固定腕关节在90度范围内活动。做肩关节的内旋、外旋被动运动要注意保护关节。 C:肘关节的屈曲和伸展
治疗者一手扶持患肢腕关节上方,另一手固定肱骨远端,在完成肘关节屈曲的同时前臂旋后,屈曲135度。完成肘伸展的同时完成前臂旋前,伸展可达0~5度。 D:腕关节的运动 治疗者一手固定前臂,另一手四指握患手的掌面,拇指在手背侧,充分地做好腕关节屈曲和伸展被动运动。 E:手指关节 掌指关节和手指关节都是挛缩的好发部位。治疗者一手在患手的尺侧固定,另一手四指在患手的手背侧,拇指在患手掌侧使掌指关节完成屈曲90度,伸展30~45度运动。 ②下肢的关节活动度训练 A:踝关节的被动运动 足下垂严重影响步行能力,必须早期开始预防其发生。治疗者用一手固定踝关节上方,另一手握住足跟向后下方牵拉,同时用右手前臂将足底向踝关节屈曲方向运动。做被动的屈曲踝关节运动十分重要。 B:足趾被动运动 治疗者左手固定前脚掌,右手活动跖趾关节和趾趾关节。 ③训练的原则 A:早期开始,一般可在发病后病情稳定的2~3天进行。 B:患者应取仰卧位,两侧均要进行训练,先做健侧,后做患侧。 C:活动某一个关节时,近端关节必须予以固定。手法要轻柔适度,避免产生疼痛。 D:手法的速度要缓慢,有节奏,一般一个动作需要3~5秒。 E:被动关节活动每日3次,各关节的诸运动方向均要进行训练,每种运动各3~5次为宜。 F:保持最大关节活动范围,肩水平外展不要超过90°,否则易引起软组织损伤。
人工神经网络及其应用 摘要:神经网络是新技术领域中的一个时尚词汇。很多人听过这个词,但很少人真正明白它是什么。本文的目的是介绍关于人工神经网络的基本包括它的背景,发展,发展前景。 关键词:神经网络,发展,背景。 1 人工神经网络产生的背景 自古以来,关于人类智能本源的奥秘,一直吸引着无数哲学家和自然科学家的研究热情。生物学家、神经学家经过长期不懈的努力,通过对人脑的观察和认识,认为人脑的智能活动离不开脑的物质基础,包括它的实体结构和其中所发生的各种生物、化学、电学作用,并因此建立了神经元网络理论和神经系统结构理论,而神经元理论又是此后神经传导理论和大脑功能学说的基础。在这些理论基础之上,科学家们认为,可以从仿制人脑神经系统的结构和功能出发,研究人类智能活动和认识现象。另一方面,19世纪之前,无论是以欧氏几何和微积分为代表的经典数学,还是以牛顿力学为代表的经典物理学,从总体上说,这些经典科学都是线性科学。然而,客观世界是如此的纷繁复杂,非线性情况随处可见,人脑神经系统更是如此。复杂性和非线性是连接在一起的,因此,对非线性科学的研究也是我们认识复杂系统的关键。为了更好地认识客观世界,我们必须对非线性科学进行研究。人工神经网络作为一种非线性的、与大脑智能相似的网络模型,就这样应运而生了。所以,人工神经网络的创立不是偶然的,而是20世纪初科学技术充分发展的产物。 2 人工神经网络的发展 人工神经网络的研究始于40年代初。半个世纪以来,经历了兴起、高潮与萧条、高潮及稳步发展的远为曲折的道路。 1943年,心理学家W.S.Mcculloch和数理逻辑学家W.Pitts 提出了M—P模型,这是第一个用数理语言描述脑的信息处理过程的模型,虽然神经元的功能比较弱,但它为以后的研究工作提供了依据。1949年,心理学家D.O.Hebb提出突触联系可变的假设,根据这一假设提出的学习规律为神经网络的学习算法奠定了基础。1957 年,计算机科学家Rosenblatt 提出了著名的感知机模型,它的模型包含了现代计算机的一些原理,是第一个完整的人工神经网络,第一次把神经网络研究付诸工程实现。由于可应用于模式识别,联想记忆等方面,当时有上百家实验室投入此项研究,美国军方甚至认为神经网络工程应当比“原子弹工程”更重要而给予巨额资助,并在声纳信号识别等领域取得一定成绩。1960年,B.Windrow和E.Hoff提出了自适应线性单元,它可用于自适应滤波、预测和模式识别。至此,人工神经网络的研究工作进入了第一个高潮。 1969年,美国著名人工智能学者M.Minsky和S.Papert编写了影响很大的Perceptron一书,从理论上证明单层感知机的能力有限,诸如不能解决异或问题,而且他们推测多层网络的感知机能力也不过如此,他们的分析恰似一瓢冷水,很多学者感到前途渺茫而纷纷改行,原先参与研究的实验室纷纷退出,在这之后近10年,神经网络研究进入了一个缓慢发展的萧条期。这期间,芬兰学者T.Kohonen 提出了自组织映射理论,反映了大脑神经细胞的自组织特性、记忆方式以及神经细胞兴奋刺激的规律;美国学者S.A.Grossberg的自适应共振理论(ART );日本学者K.Fukushima提出了认知机模型;ShunIchimari则致力于神经网络
BP神经网络原理及应用 1 人工神经网络简介 1.1生物神经元模型 神经系统的基本构造是神经元(神经细胞),它是处理人体内各部分之间相 互信息传递的基本单元。据神经生物学家研究的结果表明,人的大脑一般有1011 个神经元。每个神经元都由一个细胞体,一个连接其他神经元的轴突1010 和一些向外伸出的其它较短分支——树突组成。轴突的功能是将本神经元的输出信号(兴奋)传递给别的神经元。其末端的许多神经末梢使得兴奋可以同时送给多个神经元。树突的功能是接受来自其它神经元的兴奋。神经元细胞体将接受到的所有信号进行简单地处理后由轴突输出。神经元的树突与另外的神经元的神经末梢相连的部分称为突触。 1.2人工神经元模型 神经网络是由许多相互连接的处理单元组成。这些处理单元通常线性排列成组,称为层。每一个处理单元有许多输入量,而对每一个输入量都相应有一个相关 联的权重。处理单元将输入量经过加权求和,并通过传递函数的作用得到输出量,再传给下一层的神经元。目前人们提出的神经元模型已有很多,其中提出最早且影 响最大的是1943年心理学家McCulloch和数学家Pitts在分析总结神经元基本特
性的基础上首先提出的M-P 模型,它是大多数神经网络模型的基础。 )()(1∑=-=n i j i ji j x w f t Y θ (1.1) 式(1.1)中为神经元单元的偏置(阈值),ji w 为连接权系数(对于激发状态, ji w 取正值,对于抑制状态,ji w 取负值) ,n 为输入信号数目,j Y 为神经元输出,t 为时间,f()为输出变换函数,有时叫做激发或激励函数,往往采用0和1二值函数或S形函数。 1.3人工神经网络的基本特性 人工神经网络由神经元模型构成;这种由许多神经元组成的信息处理网络具有并行分布结构。每个神经元具有单一输出,并且能够与其它神经元连接;存在许多(多重)输出连接方法,每种连接方法对应一个连接权系数。严格地说,人工神经网络是一种具有下列特性的有向图: (1)对于每个节点存在一个状态变量xi ; (2)从节点i 至节点j ,存在一个连接权系数wji ; (3)对于每个节点,存在一个阈值; (4)对于每个节点,定义一个变换函数(,,),j i ji j f x w i j θ≠,对于最一般的情况,此函数取()j ji i j i f w x θ-∑形式。 1.4 人工神经网络的主要学习算法 神经网络主要通过两种学习算法进行训练,即指导式(有师)学习算法和非指导式(无师)学习算法。此外,还存在第三种学习算法,即强化学习算法;可把它看做有师学习的一种特例。 (1)有师学习 有师学习算法能够根据期望的和实际的网络输出(对应于给定输入)间的差来调整神经元间连接的强度或权。因此,有师学习需要有个老师或导师来提供期望或目标输出信号。有师学习算法的例子包括规则、广义规则或反向传播算法以及LVQ 算法等。 (2)无师学习 无师学习算法不需要知道期望输出。在训练过程中,只要向神
偏瘫患者的功能锻炼 Company number【1089WT-1898YT-1W8CB-9UUT-92108】
偏瘫患者的功能锻炼 为脑血管病常见的症状,它给病人带来了直接的危害,也给家庭和社会带来了种种负担。由于一侧肢体瘫痪,饮食、大小便等一切日常生活处处需要别人的照顾和护理,病人感到十分痛苦;由于长期卧床,病人抵抗力下降,容易发生各种并发症;且约6%~10%的病人治疗不当导致终身残废。因此,偏瘫肢体的功能恢复就成为偏瘫病人采取的一项至关重要的治疗护理措施。 1 功能的目的 偏瘫的功能锻炼的目的是加快肢体功能恢复的速度,改善偏瘫肢体功能恢复的程度,预防偏瘫肢体的畸形和挛缩。 2 功能锻炼的时间及方法 2.1 功能锻炼的时间早期实行功能锻炼是一项重要的康复措施。根据病情,可以在急性期过后即第2周到第4周起把护理的重点逐渐转移到功能的恢复,因为偏瘫病人神经功能恢复的最佳时期是病发后的4~6周。 2.2 功能锻炼的方法一般分为3个阶段。 2.2.1 第一阶段卧床期病人尚处于急性期或恢复早期,卧床不起。这时候,护理人员要向病人及家属讲明功能锻炼的意义,其目的主要是防止,并临床示范,教会病人家属对瘫痪肢体进行按摩和被动运动。对病
人患肢的大小关节做屈膝、屈肘、伸指等被动运动,可以避免因关节长期不用所产生的僵硬,并起到放松肌肉,牵伸挛缩的肌肉和韧带,促进神经功能的恢复。随着病情的好转,可间断辅助病人在床上练习坐起,以过渡到能自己坐起,坐在床上或椅子上练习提腿,伸膝活动。最好在足和踝关节处做一个足托,以防止病人因棉被压足背而形成足下垂。2.2.2 第二阶段离床期病人处于恢复期,患肢虽开始有活动的动作,但仍没有力量完成主动运动时,可有护理人员及患者家属帮助。开始由坐学会站立,先是扶物起立,原地踏步,轮流将两腿抬高,离开地面,在家人的保护下双手扶住椅背或床架向前移动脚步,或一手持拐杖,练习走路,足尽量不要外翻。此时上肢仍多处于瘫痪状态,可以在练习步行时,用宽布将患肢臂肘部吊在胸前,以保持肩关节的功能位。上肢的功能锻炼也应早期进行,通常上肢的恢复要比下肢慢而且困难,这与大脑神经支配的解剖部位有关。最初可以将患肢抬高,做上举动作,能改善上肢的血液循环,在平卧时可以由旁人将上臂放在离身的位置,然后病人自己将上臂移向身体,来回地移动练习,也可做曲臂、伸臂、抬臂、屈肘等活动。对手的功能锻炼除早期采取按摩和被动运动外,应经常做各种手指的屈伸、开合等练习。可用一些滚铁蛋的训练方法,如选用小皮球或乒乓球练习手指的屈伸和并拢,也可用核桃或石蛋练习手指的灵活性,或用手提轻物,练习手腕活动;其他方法如进行绳带打结、解纽扣、拨弄算盘、写字、编制手工艺品等多样化练习,均可促使手指功能的恢复。
偏瘫肢体功能锻炼指引(被动运动) 一.本肢体功能锻炼主要是被动性全关节运动,每天最好做2~3次。 二.收集资料及评估: 1.了解病人的诊断及关节活动受限的程度。 2.了解有关活动的医嘱;若病人有下列情形,应须有医嘱方可执行全关节运动: A.急性关节炎,骨折,肌腱断裂,脱臼等 B.若病人有心脏疾病者,应特别小心,因为病人无法承受剧烈运动。 3.评估病人听从指示的能力。 4.评估是否需要其他的协助。 5.评定运动的目的,如:维持现有的功能,预防功能丧失或使功能恢复。 6.确定做运动的关节。 三.准备工作: 1.病人单位的安排应有足够的空间,使协助者能维持良好的身体力学。 2.注意病人的舒适与隐私 3.协助病人穿上宽松的衣服 4.将床位调至适合工作的高度,并固定床脚的轮子 5.解释病人如何做运动及护理人员给与协助的方式 6.复习一般的关节活动,如:屈曲,伸展,过度伸展,旋转,外展,内收等。四.运动原则: 1.让病人采取一个自然舒适的姿势,操作者面向病人以观察病人的反应。 2.当抬起病人的手脚时,操作者需移动自己的重心,并使用脚的力量维持有效的动作和正确的身体力学。 3.保持病人运动的部位靠近操作者,以避免操作者不必要的拉扯和伸展。 4.针对几个固定的关节,如;肩膀,上臂,腕,手指,大腿,踝,脚趾,膝,肘及脊椎关节等,做全关节运动,但勿造成病人疼痛和痉挛. A.每个人的关节运动范围不同,应依据其反应来操作. B.当病人感到疼痛,疲劳或有抵抗作用时,则停止操作,以避免其关节受伤.
5.操作时,病人关节的前后应该予以支托. 6.慢慢的有节律的重复操作5~10次完全的全关节运动,慢而有节律的操作可避免受伤及合并症,重复操作则能维持关节的弹性与活动性. 7.指导患者利用健侧肢体帮助患侧(麻痹)肢体做运动. 8.利用为病人做基础护理或协助翻身及转换姿势时,执行被动性全关节运动 9.做完全关节运动后为病人测量生命体征(体温,脉搏,呼吸,血压),并观察病人对活动的反应. 10.维持病人正确的肢体位置,重新铺好床单,整理病人单位. 11.记录病人对活动的耐受性,操作次数,有无不良反应,及对病人全关节运动的建议. 12.协助并鼓励病人做全关节运动. A.将病人的 手臂与身体成一直线 B.抬高手臂,保持肘伸展 C.将手移至头上,将肘弯曲 1.被动运动----肩部运动
人工神经网络概述及其在分类中的应用举例 秦兴德(周末班)学号:08200203 人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。人工神经网络是在对人脑组织结构和运行机智的认识理解基础之上模拟其结构和智能行为的一种工程系统。 神经网络在2个方面与人脑相似: (1) 人工神经网络获取的知识是从外界环境中学习得来的。 (2) 互连神经元的连接强度,即突触权值,用于存储获取的信息。他既是高度非线性动力学系统,又是自适应组织系统,可用来描述认知、决策及控制的智能行为。神经网络理论是巨量信息并行处理和大规模并行计算的基础。 一人工神经网络的基本特征 1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。这特别适于实时控制和动态控制。各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。 2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。因此人工神经网络是一种具有高度非线性的超大规模连续时间动力学系统。 3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。作为神经元间连接键的突触,既是信号转换站,又是信息存储器。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。 4、具有联想存储功能:人的大脑是具有联想功能的。比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。用人工神经网络的反馈网络就可以实现这种联想。神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。 5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。 6、软件硬件的实现:人工神经网络不仅能够通过软件而且可借助软件实现并行处理。近年来,一些超大规模集成电路的硬件实现已经问世,而且可从市场上购到,这使得神经网络具有快速和大规模处理能力的实现网络。许多软件都有提供了人工神经网络的工具箱(或软件包)如Matlab、Scilab、R、SAS等。 二人工神经网络的基本数学模型
偏瘫患者的上肢功能训练 由于上肢功能的恢复要比其它部位慢,康复的效果也没有其它部位明显,患者往往对上肢功能的恢复失去信心。由于其它部位的功能恢复比较快,患者常常把更多的精力放到这些容易看到成果的部位的训练上来,而忽略了对偏瘫上肢的必要的照顾和锻炼,从而产生了一系列的偏瘫上肢问题,如:关节活动受限、肩痛、肩 -手综合症、肩关节半脱位、水肿等。这些问题的产生使上肢功能的恢复变得更加困难,而且会给患者带来更多痛苦,从而影响患者的整体功能的恢复。由于偏瘫上肢长期处于被忽略的位置, 大脑很少能够接受到患侧上肢的信息, 使大脑不能对患侧上肢进行有效的重新支配,患侧上肢就可能形成习惯性的废用。尽管上肢功能的恢复比较困难,也比较缓慢,但患者和家属还是应该给予足够的重视。 被动活动 偏瘫上肢的主动运动恢复比较缓慢,因此,早期给予患者被动活动锻炼是非常必要的。早期被动活动可以向大脑传递患肢的相关信息,能更好地促进大脑的功能重组,加快患肢功能的恢复。被动活动还可以防止上面所提及的偏瘫上肢问题的产生,同时也可以防止偏瘫上肢发展成为典型的痉挛模式。下面介绍几种简单实用的被动活动的方法: ⑴仰卧位肩外旋和臂上举 患者仰卧,患腿屈曲,膝关节直立(髋无内外旋转 举起患者的患臂,肘部伸直,使其超过头部,同时使肩胛带向前活动 然后打开患者的患手,展开手指,使拇指与四指分开 ⑵侧卧位上举 患者健侧卧位 上肢伸直上举,肩向外旋转
手掌朝向床头,拇指指向身后 治疗者用握手的方式握住患者的手, 使患者的拇指在最外面, 并使患者的手腕向上翘 (背伸⑶侧卧位活动肩胛骨 患者健侧卧位 治疗者一只手放在患者患侧肩胛骨上面,用另一只手和前臂支持患者的上肢,并使肩向外旋转和向前伸 然后,治疗者将患者的患侧肩胛骨向前和向后活动 ⑷仰卧位活动肩胛骨 患者仰卧 治疗者一手插入患者肩胛骨下面,另一只手握住患者前臂 治疗者用握住患者前臂的手拉患者的上肢向前并抬高他的肩部,另一只手将他的肩胛骨向下推 ⑸患者自助活动(此活动每天要多次练习 患者仰卧或坐位 双手十指相互交叉握住,患侧拇指在最上面 保持肘部伸直和肩关节前伸 然后患者利用健手帮助患手把上肢上举过头,再慢慢放下,反复练习 仰卧位主动活动