
一、填空题
1、哈佛体系结构数据空间和地址空间(分开),ARM920T采用(哈佛)的内核架构。
2、 ARM7TDMI采用( 3 )级流水线结构,ARM920TDMI采用( 5 )级流水线。
3、ARM7TDMI中,T表示支持16位Thumb指令集,D表示(在片可调式),M表示内嵌乘法器Multiplier,I表示(嵌入式ICE ),支持在线断点和调试。
4、“嵌入性”、“专用性”与“计算机系统”是嵌入式系统的三个基本要素。
5、ARM处理器共有37个寄存器,31个通用寄存器,6个状态寄存器。寄存器R13通常用作堆栈指针,称作SP。寄存器R14用作子程序链接寄存器,也称为链接寄存器LK (Link Register)。
6、程序状态寄存器CPSR的N、Z、C、V分别指--,I=1指-禁止IRQ中断-、F=1指-禁止FIQ中断-,M[4:0]用做-处理器模式选择-。
7、ARM微处理器支持四种类型的堆栈,即:满递增堆栈、满递减堆栈、空递增堆栈、空递减堆栈。
8、ARM微处理器有 7 种工作模式,它们分为两类特权模式、非特权模式。其中用户模式属于非特权模式
9、ARM支持两个指令集, ARM核因运行的指令集不同,分别有两个状态 ARM状态、thumb状态,状态寄存器CPSR的 T (或者填 D5 )位反映了处理器运行不同指令的当前状态
10、ARM处理器有两种总线架构,数据和指令使用同一接口的是冯诺依曼结构,数据和指令分开使用不同接口的是哈佛结构
11、ARM核有多个寄存器,其中大部分用于通用寄存器,有小部分作为专用寄存器, R15 寄存器用于存储PC,R13通常用来存储 SP (或者填堆栈指针)
12、编译链接代码时,有两种存储代码和数据的字节顺序,一种是小端对齐,另一种是大端对齐
13、不同的中断处理不同的处理模式,具有不同的优先级,而且每个中断都有固定的中断入口地址。当一个中断发生时,相应的R14存储中断返回地址,SPSR存储状态寄存器CPSR的值。
14、嵌入式微处理器有嵌入式微处理器、嵌入式微控制器、曲入式DSP处理器和嵌入式片上系统四种类型。
15、ARM9TDMI采用5级流水线:取指、译码、执行、访存和写回。
16、AMBA总线结构包括ASB、AHB和APB总线。ASB/AHB用于CPU与存储器、DMA控制器、总线仲裁控制器等片上系统中芯片的连接,APB用于连接低速的外围设备。
17、函数的参数传递方法有两种:R0~R3寄存器和堆栈
二、指令解析
1、LDR R0,[R1] ;从R1寄存器指向的地址中取出一个字的数据,存储到R0寄存器中
2、 STR R0,[R1],#8 ;将R0中的字数据写入R1为地址的存储器中,并将新地址R1+8写入R1
3、 ADDS R1,R1,#1 ;R1+1给R1
4、 LDMFD R13!,{R0,R4-R12,PC} ;将堆栈内容恢复到寄存器(R0,R4 到R12,LR)。
5、初始值R1=23H,R2=0FH执行指令BIC R0, R1,R2,LSL #1后,寄存器R0,R1的值分别是多少? R0=21H, R1=23H, R2=1EH
6、写一条 ARM 指令,完成操作r1 = r2 * 3(4分)
add r1, r2, r2 LSL #1
7、说明指令STMIA r12!, {r0-r11}的操作功能。(4分)
将R0-R11十二个寄存器中的32位数据,存储到R12地址指针为起始地址的内存中,地址的操作方式是先操作、后增加,并更新地址。
8、ADD R0,R0,#1 ;将R0+1的结果送R0是保存
9、ADD R0,R1,[R2] ;将以R2中的内容为地址的单元中的值与R1相加,结果送R0保存
10、LDR R0,[R1+4] ;指令实现的功能是将R1的内容加4后送R0
4.LDR R0,[R1+4]!;将R1的内容加4后送R0,然后R1的内容自增4个字节
5.B Lable ;程序无条件跳转到标号Lable处执行
6.MOV R1,R0 ;指令实现的功能是将寄存器R0的值传送到寄存器R1
7.CMP R1,R0 ;寄存器R1的值与寄存器R0的值相减,根据结果设置CPSR的标志位
8.CMN R1,R0 ;将寄存器R1的值与寄存器R0的值相加,根据结果设置CPSR的标志位9.ORR R0,R0,#3 ;该指令设置R0的0、1位,其余位保持不变
10.MRS R0,SPSR ;传送SPSR的内容到R0
11.CMP R1,R2 ;寄存器R1的值与寄存器R2的值相减,根据结果设置CPSR的标志位12.MRS R0,CPSR ;传送SPSR的内容到R0
13.MOV R2,R0 ;将寄存器R0的值传送到寄存器R2
14.ADD R1,R1,#3 ;将R1+3的结果送R1是保存
15.ADD R2,R1,[R0] ;将以R0中的内容为地址的单元中的值与R1相加,结果送R2保存16.LDR R1,[R0+4] ;将R1的内容加4后送R0
17.LDR R1,[R0+4]!;将R1的内容加4后送R0,然后R1的内容自增4个字节。
18.AND R0,R0,#3 ;保持R0的0、1位,其余位清零
19.B 0x1200 ;程序无条件跳转到0x1200处执行
20.CMN R1,R2 ;将寄存器R1的值与寄存器R2的值相加,并根据结果设置CPSR的标志位
三、看图回答
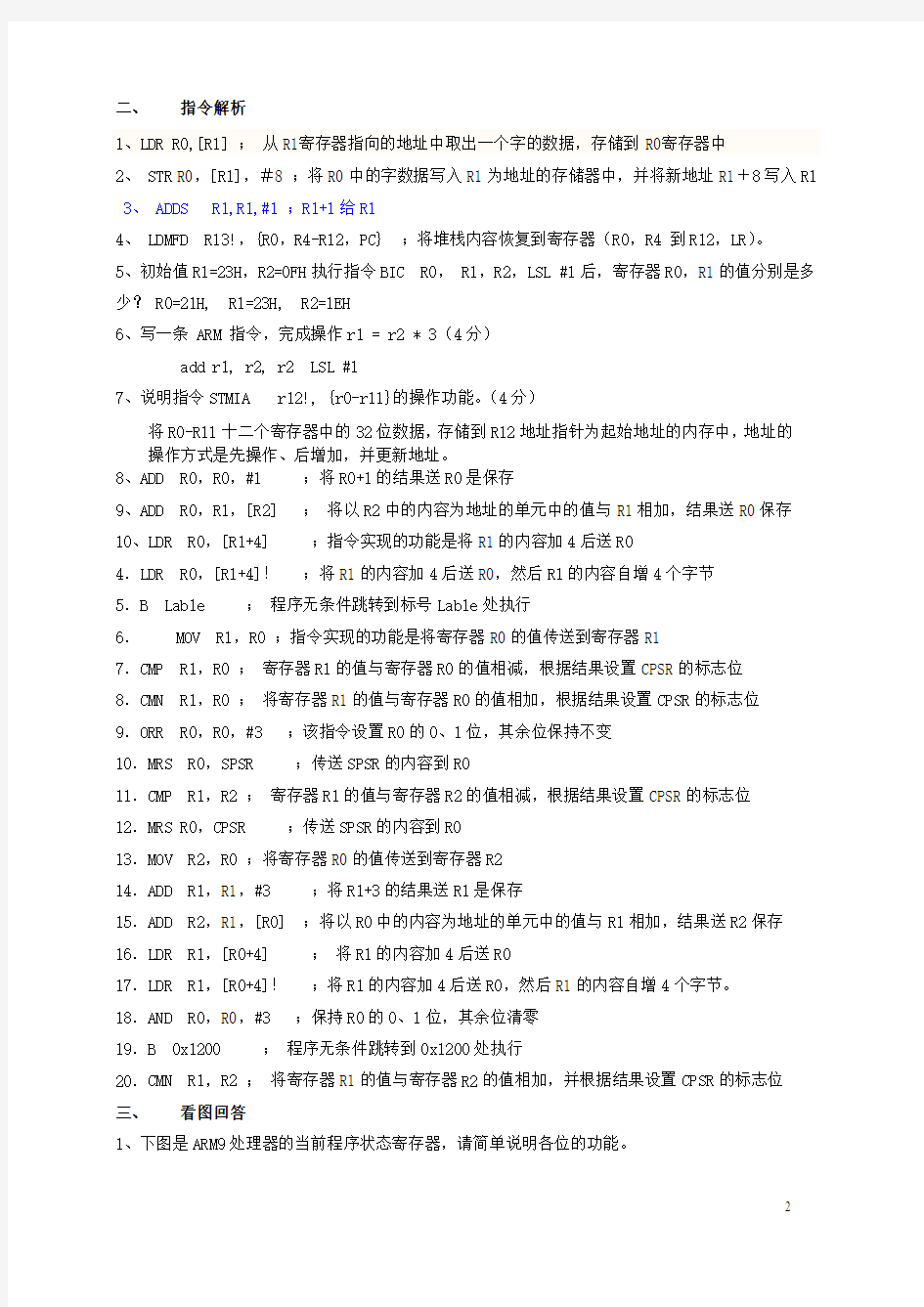
1、下图是ARM9处理器的当前程序状态寄存器,请简单说明各位的功能。
1673120435282930278ARM7当前程序状态寄存器
N :负标志位,运算结果的第31位值,记录标志设置的结果。 Z :零标志位,如果标志设置操作的结果为0,则置位。
C :进位标志位,记录无符号加法溢出,减法无错位,循环移位。 V :溢出标志位,记录标志设置操作的有符号溢出。
I :中断禁止标志位,置位时禁止IRQ 中断,否则允许IRQ 中断使能。 F :中断禁止标志位,置位时禁止FIQ 中断,否则允许FIQ
中断使能。
T :控制位,置位时处理器运行在Thumb 状态下,清零时处理器运行在ARM 状态下。 M0~M4:模式控制位,定义处理器的7中模式。
其余位为保留位,留作将来使用。
2、阅读下列与看门狗有关的寄存器描述,解释每一行代码的功能。
#define rWTDAT (*(volatile unsigned *)0x53000004) // 第2行 #define rWTCNT (*(volatile unsigned *)0x53000008) // 第3行 void watchdog_test(void) { rWTCON = ((PCLK/1000000-1)<<8)|(3<<3)|(1<<2); // 第4行 rWTDAT = 7812;
// 第5行
rWTCNT = 7812; // 第6行 rWTCON |=(1<<5);
// 第7行
}
3、阅读以下S3C2410部分用户手册.求:当PCLK 或 UCLK 为40 MHz 时,串口0的波特率为2400 bps ,串口1的波特率为115200bps ,相应的控制寄存器如何设置. UART BAUD RATE DIVISOR REGISTER
There are three UART baud rate divisor registers (寄存器)including UBRDIV0, UBRDIV1 and UBRDIV2 in the UART block (模块). The value stored in the baud rate divisor register
(UBRDIVn), is used to determine the serial Tx/Rx clock rate(baud rate) as follows: UBRDIVn = (int)(PCLK / (bps x 16) ) –1 or UBRDIVn = (int)(UCLK / (bps x 16) ) –1 Where, the divisor should be from 1 to (216-1) and UCLK should be smaller than PCLK.
四、简答题
1、根据嵌入式系统的特点,写出嵌入式系统的定义。
答:嵌入式系统是以应用为中心,以计算机技术为基础,软/硬件可裁减,功能。可靠性,成本,体积,功耗要求严格的专用计算机系统。
2、嵌入式系统的主要应用领域有哪些?
3、什么是RISC?什么是CISC?
答:RISC是英文Reduced Instruction Set Computer的缩写,汉语意思为"精简指令系统计算机"。相对应的CISC就是"复杂指令系统计算机"的意思。
CPU从指令集的特点上可以分为两类:CISC和RISC。
4、ARM9TDMI中的T、D、S、I分别表示什么含义?
答:T表示支持16位Thumb指令集,D表示在片可调式(Debug),M表示内嵌乘法器Multiplier,I表示嵌入式ICE ,支持在线断点和调试。
4、ARM处理器模式和ARM处理器状态有什么区别?
答:(1)ARM7T ARM 体系结构支持7种处理器模式,分别为:用户模式、快中断模式、中断模式、管理模式、中止模式、未定义模式和系统模式。
(2)ARM 处理器状态:ARM状态、Thumb状态。
(3)两种处理器状态都有这7种处理器模式;两个状态之间切换并不影响处理器模式或寄存器内容。
5、ARM9TDMI有几种寻址方式?
答:立即寻址、寄存器寻址、基地址变址寻址、寄存器偏移寻址、寄存器间接寻址、多寄存器寻址6、ARM9的内部寄存器R13、R14、R15的主要功能和作用?
7、FIQ、IRQ有什么不同?向量IRQ和非向量IRQ有什么不同?
答:(1)FIQ的优先级比IRQ高,对外部事件响应比IRQ快。
(2)A:向量IRQ 具有中等优先级,对外部事件响应比较及时;非向量IRQ优先级最低,中断延迟时间比较长。
B:向量IRQ能为每个向量IRQ中断源设置服务程序地址;而所有的非向量IRQ中断都共用一个相同的服务程序入口地址。
8、ARM9TDMI支持哪几种指令集,各有什么特点?
9、ARM9TDMI有几种处理器模式,简单介绍该几种模式的工作特点?
答:P45
ARM7T ARM 体系结构支持7种处理器模式
1.用户模式:正常处理程序时的模式
2.快中断模式:响应快速中断时的处理模式
3.中断模式:响应普通中断时的模式
4.管理模式:操作系统的保护模式
5.中止模式:指令或数据预取操作中止时的模式,该模式下实现虚拟存储器或存储器保护
6.未定义模式:当执行未定义的指令时进入该模式
7.系统模式:运行特权操作系统任务时的模式
10、ARM9TDMI采用了几级流水线工作方式,简要说明。
11、ARM9TDMI支持的数据类型有几种?各有什么要求?
12、ARM920T体系结构支持哪两种方法存储字数据?
13、ARM920T体系结构所支持的哪几种异常?说明其具体含义。
14、简述ARM处理器对异常的响应的步骤。
15、简述ARM处理器从异常返回的步骤
16、写出基于ARM920T核的处理器的异常优先级(Exception Priorities)。
17.写出基于ARM920T核的处理器的异常向量(Exception Vectors)及异常进入的模式
18.画出采用大端格式存放01020304H的存储器示意图。
19.画出采用小端格式存放05060708H的存储器示意图。
20、ARM920T有哪些运行模式,其中哪些属于特权模式?
21、用ARM汇编指令写出实现64位加法和64位减法的代码段,使用的寄存器请自行分配
假定低32位数存放在r0和r1里面,高32位数存放在r2和r3里面。
答:加法:ADDS r0, r0, r1 //加S是因为要让这个操作影响标志位
ADC r2, r2, r3 //ADC是带进位的加法,如果上一条指令产生进位则一起加进来
减法:SUBS r0, r0, r1 //加S是因为要让这个操作影响标志位
SBC r2, r2, r3 // SBC是带进位的减法指令
22、S3C2410 支持几种引导方式(或者说是内存映射方式)?简述Nand引导方式S3C2410硬件做的事情。
1)nor flash启动方式。 2)nand flash启动方式。
从Nand flash 启动时,S3C2410首先会执行固化在片上ROM中的一段小程序,这段程序负责将nand flash前2K的代码搬移到片上RAM,然后将PC指针指向0x0地址(注意这个时候片上RAM被映射到0x0的起始地址)
23、ARM微处理器内核是如何进行异常处理的?
答:1)当异常产生时,ARM内核拷贝CPSR到SPSR_
果需要);保存返回地址到LR_
答:ARM提供的可执行的映像文件的模板包括了下面3个生成目标:
1)Debug使用本生成目标生成的映像文件中包含了所有的调试信息,用于在开发过程中使用;
2)2)Release使用本生成目标生成的映像文件中不包含调试信息,用于生成实际发行的软件版本;3)DebugRel使用本生成目标生成的映像文件中包含了基本的调试信息。
25、为什么需要嵌入式操作系统?
答:嵌入式系统与一般的系统不同,设计成为执行特定的操作,但是初期的嵌入式系统比较单纯,不需要特殊的操作系统,由人来编写程序并顺序执行,只有当中间发生中断时才会暂时脱离此顺序程序。过去的嵌入式系统主要与简单而顺序的操作有关,使用操作系统成为浪费和不必要的举措。但是最近的嵌入式系统领域中系统本身相当庞大,网络和多媒体成为系统的基本功能,嵌入式系统要做的事情既多又复杂,顺序程序的操作变得越来越难。因而在嵌入式系统中出现了操作系统的概念,要满足其实时的要求,进而产生了实时操作系统。26、简述μC/OS-Ⅱ操作系统的移植条件。
答:要使μc/os-ii能正常运行,处理器必须满足以下要求。
(1)处理器的c编译器能产生可重入代码
可重入代码是指可以被多个任务同时调用,而不会破坏数据的一段代码;或者说代码具有在执行过程中打断后再次被调用的能力。
(2)处理器支持中断,并且能产生定时中断。arm处理器支持中断并能产生定时中断。
(3)c语言可以开/关中断
arm处理器核包含一个cpsr寄存器,该寄存器包括一个全局中断禁止位,控制它打开和关闭中断。
(4)处理器支持一定数量的数据存储硬件堆栈
对于一些只有10根地址线的8位控制器,芯片最多可访问1kb存储单元,在这样的条件下移植是比较困难的。
(5)处理器有将堆栈指针以及其他cpu寄存器的内容读出并存储到堆栈或内存中去的指令arm处理器中汇编指令stmfd可以将所有寄存器压栈,对应的也有一个出栈指令ldmfd。27、简要说明嵌入式操作系统多任务通讯的常用方式。
答:多任务通讯的方式:a)共享内存,主要是数据的共享;b)信号量,用于基本的互斥和任务同步;c)消息队列和管道,单CPU的消息传送;d)Socket和远程过程调用,用于网络间任务消息传送。
28、嵌入式开发环境主要包括哪些组件?
嵌入式系统开发需要交叉编译和在线调试的开发环境,主要包括
1宿主机2目标机(评估电路板)3基于JTAG的ICD仿真器、或调试监控软件、或在线仿真器ICE。4运行于宿主机的交叉编译器和链接器、以及开发工具链或软件开发环境。5嵌入式操作系统
29、在进行基于ARM核的嵌入式系统软件开发时,调用如下函数:
int do_something(int arg1,void *arg2,char arg3,int *arg4)
这四个参数通过什么方式从调用程序传入被调函数?
根据ATPCS编程规范,调用函数和子程序通过R0——R3四个寄存器传递参数,
超过四个参数使用堆栈传递。因此arg1通过R0传入,arg2, 通过R1传入,arg3通过R2传入,arg4通过R3传入
30、简述MMU的含义及主要工作。
答:MMU,也就是“内存管理单元”(memory management unit)。
其主要作用是两个方面:一是地址映射;二是对地址访问的保护和限制。
31、ARM9TDMI核中TDMI的基本含义是:P42
T表示支持16位Thumb指令集,D表示在片可调式(Debug),
M表示内嵌乘法器Multiplier,I表示嵌入式ICE ,支持在线断点和调试。
32、简述ARM微处理器支持的指令集。
ARM微处理器支持32位的ARM指令集和16位的Thumb指令集。ARM指令集效率高,但代码密度低;Thumb指令集具有较高的代码密度,可保持ARM的大多数性能上的优势,可看做是ARM指令集的子集。ARM程序和Thumb程序可以相互调用,且没有状态切换开销。
33、解释以下标识符的作用
33、描述嵌入式系统中存储系统结构,存储器分类以及各类存储器的常规用途
分类:随机存储器(RAM):方便读写,
但掉电后信息丢失。
只读存储器(ROM):读取方便,Array但写入需要特殊时序,
掉电后信息不丢失。
34、最小系统框图原理
时钟模块:为ARM工作提供时钟复位模块:实现复位
JTAG:实现代码的下载与调试UART:实现对调试信息的终端显示
FLASH模块:存放启动代码,操作系统,用户程序
SDRAM模块:为程序提供存储空间
五、编程题
1.用汇编语言编写程序读取存储器0x40003100地址上的数据,将数据加1,若结果小于10则使用
STR指令把结果写回原地址,若结果大于等于10,则把0写回原地址。
2、用汇编语言调用C语言实现n个数相加,n为C函数的参数,由汇编语言传递,结果存放在R5寄存器中。
C程序:
2.3汇编指令实验2
X EQU 11
Y EQU 8
BIT23 EQU (1<<23)
AREA Example3,CODE,READONLY
ENTRY
CODE32
START ;使用MOV.ADD指令实现:R8=R3=X+Y MOV R0,#X
MOV R1,#Y
ADD R3,R0,R1
MOV R8,R3
;实现R5=0X5FFFFFF8-R8*8
MVN R0,#0XA000000
SUB R5,R0,R8,LSL#3
;判断(5*Y/2)吗,若大于,则R5=R5&0XFFFF0000
否则,R5=R5|0X000000FF
MOV R0,#Y
ADD R0,R0,R0,LSL#2 MOV R0,R0,LSL#1
MOV R1,#X
MOV R1,R1,LSL#1
CMP R0,R1
LDRHI R2,=0XFFFF0000
ANDHI R5,R5,R2
ORRLS R5,R5,#0X000000FF
使用TST指令测试R5的BIT23是否为1,若是则将BIT6位清零
TST R5,#BIT23
BICNE R5,R5,#0X00000040
B START
END
2.4汇编指令实验3
AREA Example3,CODE,READONLY ENTRY
CODE32
START ;(x>y)z=100;
;else z=50;
MOV R0,#76
MOV R1,#243
CMP R0,R1
MOVHI R2,#100
MOVLS R2,#50
;for(i=0;i<10;i++)
;{ x++
;}
MOV R0,#0
MOV R2,#0
FOR_L1 CMP R2,#10
BHS FOR_END
ADD R0,R0,#1
ADD R2,R2,#1
B FOR_L1
FOR_END NOP
;while(x ;{x*=2 ;} MOV R0,#1 MOV R1,#20 B WHILE_L2 WHILE_L1 MOV R0,R0,LSL#1 WHILE_L2 CMP R0,R1 BLS WHILE_L1 WHILE_END NOR ;do ;{ ;} while(x>0); MOV R0,#5 DOWHILE_L1 ADD R0,R0,#-1 DOWHILE_L2 MOVS R0,R0 BNE DOWHILE_L1 DOWHILE_END NOP ;switch(key&0x0F) ;{ case0: ; case2: ; case3: x=key+y; ; break; ; case5: x=key-y; ; break; ; case7: x=key-y; ; break; ; default:x=168; ; break; ;} MOV R1,#3 MOV R2,#2 SWITCH AND R2,R2,#0x0F CASE_0 CMP R2,#0 CASE_2 CMPNE R2,#0 CASE_3 CMPNE R2,#0 BNE CASE_5 ADD R0,R2,R1 B SWITCH_END CASE_3 CMP R2,#5 BNE CASE_7 SUB R0,R2,R1 B SWITCH_END CASE_7 CMP R2,#7 BNE DEFAULT MUL R0,R2,R1 B SWITCH_END DEFULT MOV R0,#168 SWITCH_END NOP HALF B HALF END 2.6 C语言程序实验 #define unit8 unsigned int #define unit32 unsigned int #define N 100 unit32 sum; void Main(void) { unit32 i; sum=0; for(i=0;i<=N;i++) { sum+=i; } while(1); } 汇编 IMPORT |Image$$RO$$Limit| IMPORT |Image$$RW$$Base| IMPORT |Image$$ZI$$Base| IMPORT |Image$$ZI$$Limit| IMPORT Main AREA Start,CODE,READONLY ENTRY CODE32 Rest LDR SP,=0X40003F00 LDR R0,=|Image$$RO$$Limit| LDR R1,=|Image$$RW$$BaseE| LDR R3,=|Image$$ZI$$Base| CMP R0,R1 BEQ LOOP1 LOOP0 CMP R1,R3 LDRCC R2,[R0],#4 STRCC R2,[R1],#4 BCC LOOP0 LOOP1 LDR R1,=|Image$$ZI$$Limit| MOV R2,#0 LOOP2 CMP R3,R1 STRCC R2,[R3],#4 BCC LOOP2 B Main END 2.7 2.8 GPIO输出控制实验 #include "config.h" #define LED1_CON (1<<11) #define LED2_CON (1<<12) #define LED3_CON (1<<4) #define LED4_CON (1<<6) #define BEEP (1<<10) #define BEEP_MASK (~BEEP) void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<50000; i++); } //控制蜂鸣器BE的一声 void RunBeep(void) { rGPHDAT=rGPHDAT&BEEP_MASK; //BEEP=0 DelayNS(5); rGPHDAT=rGPHDAT|BEEP; BEEP=1 DelayNS(5); } //控制LED1~LED4全部点亮 void LED_DispAllOn(void) { rGPHDAT=rGPHDAT|(0x03<<11); rGPHDAT=rGPHDAT|(0x05<<4); } //控制LED1~LED4全部熄灭 void LED_DispAllOff(void) { rGPHDAT=rGPHDAT&(~(0x03<<11)); rGPHDAT=rGPHDAT&(~(0x05<<4)); } //控制LED1~LED4显示指定16进制数值。LED4为最高位,LED1为最低位 点亮表示该位为1 void LED_DispNum (unit32 dat) { dat=dat&0x0000000F; //参数过滤 //控制LED4,LED3显示(d3,d2位) if(dat&0x08)rGPHDAT=rGPHDAT|(0X01<<16 ); else rGPHDAT=rGPHDAT&(~(0X01<<16)); if(dat&0x04)rGPHDAT=rGPHDAT|(0X01<<4) ; else rGPHDAT=rGPHDAT&(~(0X01<<4)); //控制LED2,LED1显示(d1,d0位) rGPHDAT=(rGPHDAT&(~(0X03<<11)))|((dat &0x03)<<11); } 初始化I/0,然后控制LED显示 int main(void) { int i; 初始化I/0 rGPECON=(rGPECON&(~(0X0F<<22)))|(0X05 <<22); rGPHCON=(rGPECON&(~(0X33<<8)))|(0X11< <8); rGPHCON=(rGPECON&(~(0X03<<20)))|(0X51 <<20); } 控制LED显示 while(1) { RunBeep(); //蜂鸣器响一声 LED全闪烁5次 for(i=0;i<5;i++) { LED_DisAllOff();// LED全熄灭 DelayNS(5); LED_DisAllOn();//LED全点亮 DelayNS(5); 控制LED指示0~F的十六进制数值 } for(i=0;i<16;i++) { LED_DisNum(i);//显示数值i DelayNS(5); } } return(0); } 2.9GPIO输入控制实验 #include "config.h" #define KEY_CON (1<<4) #define BEEP (1<<10) #define BEEP_MASK (~BEEP) void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<50000; i++); } int main(void) { rGPFCON=(rGPFCON&(~(0x03<<8))); rGPHCON=(rGPHCON&(~(0x03<<20)))|(0x01 <<20); while(1) { if(rGPFDAT&KEY_CON) { rGPHDAT=rGPHDAT|BEEP; } else { rGPHDAT=rGPHDAT|BEEP_MASK; } DelayNS(1); } return(0); } 2.10外部中断实验 #include "config.h" #define LED1_CON (1<<11) #define LED2_CON (1<<12) #define LED3_CON (1<<4) #define LED4_CON (1<<6) #define KEY_CON (1<<4) uint8 ledcon=0x00; void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<50000; i++); } void IRQ_Eint4(void) { int i; rGPFCON=rGPFCON&(~(0x03<<8)); for(i=0;i<10000;i++); if(rGPFDAT&KEY_CON) { rGPFCON=rGPFCON|(0x02<<8); rEINTPEND=(1<<4); rSRCPND=(1<<4); rINTPND=rINTPND; return; } rGPFCON=rGPFCON|(0x02<<8); if(ledcon) { ledcon=0; rGPEDAT=rGPEDAT&(~LED1_CON); } else { ledcon=1; rGPEDAT=rGPEDAT|LED1_CON; } rEINTPEND=(1<<4); rSRCPND=(1<<4); rINTPND=rINTPND; } void EINT_init(void) { rGPFCON=(rGPFCON&0xFFFFFCFF)|(0x02<<8 ); rEXTINT0=(0x02<<16); VICVectAddr[4]=(uint32)IRQ_Eint4; rPRIORITY=0x00000000; rINTMOD=0x00000000; rINTMSK=~0x00000010; rEINTMASK=~0x00000010; } void LED_DispAllOff(void) { rGPEDAT= rGPEDAT&(~(0x03<<11)); rGPHDAT= rGPHDAT&(~(0x05<<4)); } int main(void) { rGPECON=(rGPECON&(~(0x0F<<22)))|(0x05 <<22); rGPHCON=(rGPHCON&(~(0x33<<8)))|(0x11< <8); LED_DispAllOff(); EINT_init(); IRQEnable(); while(1); return(0); } 2.11 UART通讯实验 #include "config.h" void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<50000; i++); } 串口接受字符 Unit g_getch=0; Int main(void) {int i; UART_Select(0); UART_Init(); for(i=0;i<10.i++); { UART_Send(“hello world!”\n); } While(1) { g_getch=UART_Get Key();//接收字符 if(g_getch==0x0d) //判断是否为回车键{ UART_SendByte=(‘\r’);//发送换行符 UART_SendByte=(‘\n’); } Else {UART_ SendByte(g_getch); } } return(0); } 2.13 定时器实验 #include "config.h" #define BEEP (1<<10) #define BEEP_MASK void DelayNS(uint32 dly) { uint32 i; for(; dly>0; dly--) for(i=0; i<50000; i++); } Void IRQ_Time0(void) { 取反蜂鸣器控制I/O的状态 If(rGPHDAT&BEEP) { rGPHDAT=rrGPHDAT &BEEP_MASK; } Else { rGPHDAT=rrGPHDAT |BEEP; } 清除中断标志 rSRCPND=1<<10; rINTPND=rINTPND; 初始化定时器0,每0.5秒产生一次定时器中断 int main(void) { //初始化I/O rGPHCON= (rGPHCON( ~(0x03<<20)))|(0x01<<20); // rGPHDAT=rrGPHDAT |BEEP;//防止蜂鸣器响设置中断服务程序 VICVectAddr[10]=(unit32)IRQ_Time0; 设置中断控制器 rPRIOITY =0x00000000;//使用默认的固定的优先级 rINTMOD= 0x00000000;//所有中断均为IRQ 中断 rINTMSK= ~(1<<10);//打开timer0中断 定时器设置 rTCFGO =250;//预分频器0设置为250,取得200KHZ rTCFG1 =1;//timer0再取1/4分频,取得50KHZ rTCMPB0 =0x0000;//设置定时器为0 rTCNTB0 =25*1000;//定时0.5秒 rTCON =(1<<1);//更新定时器数据 rTCON =(1<<0)|(1<<3);//启动定时器IRQEable();//使能IRQ中断 While(1); Return(0); } 嵌入式系统期末考试题库及答案 《嵌入式系统》试题库 《嵌入式系统》试题库 一、填空题 1、嵌入式系统的基本定义为:以应用中心,以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 2、从模块结构来看,嵌入式系统由三大部分组成,分别是:硬件、软件和开发平台。 3、从层次角度来看,嵌入式系统由四大部分组成,分别是:应用软件层、操作系统层、板级支持包(或硬件抽象层)和硬件层。 4、嵌入式产品的主要度量指标包括:上市时间、设计成本和产品质量。 5、嵌入式系统的设计过程包括:需求分析、规格说明、体系结构设计、构件设计、系统集成和系统测试。 6、需求分析包括:功能性需求分析和非功能性需求分析。 7、确定输入信号是数字信号还是模拟信号属于功能性需求。 8、确定系统的物理尺寸和重量属于非功能性需求。 9、在嵌入式系统的设计过程中,其中规格说明解决“做什么”。 10、在嵌入式系统的设计过程中,其中体系结构设计解决“如何做”。 11、在嵌入式系统的设计过程中,软硬件划分应该在体系结构设计阶段完成。12、在嵌入式系统的设计过程中,处理器的选择应该在体系结构设计阶段完成。13、在嵌入式系统的设计过程中,嵌入式操作系统的选择应该在体系结构设计阶段完成。14、在嵌入式系统的设计过程中,完成原理图设计应在构件设计阶段完成。15、在嵌入式系统的设计过程中,完成版图设计应在构件设计阶段完成。16、在嵌入式系统的设计过程中,完成软件设计应在构件设计阶段完成。 17、反映嵌入式系统设计人员的水平能力主要在于总体设计(需 求分析、规格说明和体系结构设计)和系统调试。 18、设计流程指的是设计过程中所经历的过程步骤。 19、设计重用技术主要分为基于IP 核的模块级重用和基于平台的系统级重用。20、软硬件协同设计由系统描述、软硬件划分、软硬件协同综合以及软硬件协同模拟与验证几个阶段组成。 21、嵌入式处理器的分类包括三种,分别是:嵌入式微处理器、微控制器(或单片机)和 第1 页共44 页 1 《嵌入式系统》试题库 数字信号处理器(DSP)。 22、列举常见的ARM 系列处理器:ARM7 系列、ARM9 系列、ARM11 系列、Cortex-M 系列、Cortex-R 系列、Cortex-A 系列等。 23、ARM 系列微处理器支持的数据类型有:字节、半字和字等三种类型。24、ARM 系列微处理器支持的字数据存储格式有:大端格式和小端格式。25、ARM 系列处理器通过执行BX 或者BLX 指令来实现工作状态的切换。26、列举常见的存储器类型:SRAM、DRAM、Flash、EEPROM 等。27、对于RAM 存储器主要有两种,分别是:SRAM 和DRAM。 28、在时钟信号边沿到来之前的一段时间内,数据信号必须保持稳定,这段时间称为器件的建立时间;在时钟信号边沿到来之后的一段时间内,数据信号必须保持稳定,这段时间称为器件的保持时间。 29、总线是在多于两个模块(设备、子系统)之间传送信息的公共通路。30、总线的功能是信息共享和交换。 31、总线由传输信息的物理介质和管理信息传输的协议组成。 32、挂接在总线上的设备依据启动总线事务的能力可以分为主设备和从设备。33、总线协议依据同步方式可分为同步时序协议和异步时序协议。34、总线仲裁方式可分为集中式仲裁和分布式仲裁。 1.下面哪一种工作模式不属于ARM特权模式(A)。 A.用户模式B.系统模式C.软中断模式D.FIQ模式 2.ARM7TDMI的工作状态包括( D )。 A.测试状态和运行状态B.挂起状态和就绪状态 C.就绪状态和运行状态D.ARM状态和Thumb状态 3.下面哪个Linux操作系统是嵌入式操作系统( B )。 A.Red-hat Linux B.uclinux C.Ubuntu Linux D.SUSE Linux 4.使用Host-Target联合开发嵌入式应用,( B )不是必须的。 A.宿主机B.银河麒麟操作系统 C.目标机D.交叉编译器 5.下面哪个不属于Linux下的一个进程在内存里的三部分的数据之一(A)。 A.寄存器段B.代码段 C.堆栈段D.数据段 选择题(共5小题,每题2分,共10分) 1.下面哪个系统属于嵌入式系统( D )。 A.“天河一号”计算机系统B.IBMX200笔记本电脑 C.联想S10上网本D.Iphone手机 2.在Makefile中的命令必须要以(A)键开始。 A.Tab键B.#号键 C.空格键D.&键 3.Linux支持多种文件系统,下面哪种不属于Linux的文件系统格式( B )。 A.Ext B.FA T32 C.NFS D.Ext3 4.下面哪种不属于VI三种工作模式之一( D )。 A.命令行模式B.插入模式 C.底行模式D.工作模式 5.下面哪一项不属于Linux内核的配置系统的三个组成部分之一( C )。 A.Makefile B.配置文件(config.in) C.make menuconfig D.配置工具 1.人们生活中常用的嵌入式设备有哪些?列举4个以上(1) 手机,(2) 机顶盒,(3) MP3,(4) GPS。(交换机、打印机、投影仪、无线路由器、车载媒体、PDA、GPS、智能家电等等。) 2.ARM9处理器使用了五级流水线,五级流水具体指哪五级:(5) 取指,(6) 译码,(7) 执行,(8) 缓冲/数据,(9) 回写。 3.在Makefile中的命令必须要以(10) Tab 键开始。 4.Linux支持多种文件系统,主要包括哪些(写出其中4中就行)(11) Ext,(12) VFA T,(13) JFS,(14) NFS。(JFS、ReiserFS、Ext、Ext2、Ext3、ISO9660、XFS、Minx、MSDOS、UMSDOS、VFAT、NTFS、HPFS、NFS、SMB、SysV、PROC等) 5.VI的工作模式有哪三种:(15) 命令行模式,(16) 插入模式,(17) 底行模式。 1. 与个人计算机(PC)相比,嵌入式系统具有许多不同的特点。下面不属于嵌入式系统特点的是( )。 A)嵌入式系统与具体应用紧密结合,具有很强的专用性 B)嵌入式系统通常包含在非计算机设备(系统)中,具有隐蔽性 C)嵌入式系统的软硬件资源往往受到严格的限制 D)嵌入式系统性能较低,价格也比较便宜 【解析】:与人们日常使用的个人计算机相比,嵌入式系统具有许多不同的特点。1)专用型, 嵌入式系统与具体应用紧密结合,具有很强的专用型;2)隐蔽性,嵌入式系统通常总是非计 算机设备(系统)中的一个部分,它们隐藏在其内部,不为人知;3)资源受限,嵌入式系统 通常要求小型化、轻量化、低功耗及低成本,因此其软硬件资源受到严格的限制;4)高可靠 性;5)实时性;6 )软件固化。综上所述,D选项不属于嵌入式系统的特点。 2. 嵌入式系统中的CPI具有一些与通用计算机所使用的CPU不同的特点,下面不是其特点的是()。 A)支持实时处理 B)低功耗 C)高主频 D)集成了测试电路 【解析】:嵌入式系统中的CPU一般具有4个特点:1 )支持实时处理;2)低功耗;3)结构可扩展;4)集成了测试电路。因此,该题选C。 嵌入式系统使用的片上系统英文缩写名为SoC下面关于SoC叙述中错误的是()。 A SoC也称为系统级芯片,它是电子设计自动化水平的提高和集成电路制造技术飞速发展的产物 B)SoC芯片中既包含数字电路,也可以包含模拟电路,甚至还能包含数字/模拟混合电路和射频电路 C)SoC将嵌入式系统的几乎全部功能都集成在一块芯片中,单个芯片就能实现数据的采集、转换、存储、处理和I/O等多种功能 D)SoC的设计制造难度很大,目前还没有得到广泛使用 【解析】:随着电子设计自动化水平的提高和VLS制造技术的飞速发展,半导体加工已经从微米、亚微米进入到深亚微米的时代,单个芯片上可以集成几亿个甚至几十亿个晶体管,因而能够把计算机或其他一些电子系统的全部电路都集成在单个芯片上,这种芯片就是所谓的片上系统。 SoC芯片中既包含数字电路,也可以包含模拟电路,甚至还能包含数字/模拟混合电路和射频电 路。由于SoC将嵌入式系统的几乎全部功能都集成在一块芯片中,单个芯片就能实现数据的采集、 转换、存储、处理和I/O等多种功能。目前,大多数32位的嵌入式处理芯片均为SoC, SoC逐渐成为集成电路设计的主流发展趋势。综上可知,D选项不正确。 微电子技术特别是集成电路制造技术是嵌入式系统发展的重要基础,下面关于集成电路的叙述中错误的是()。 A)集成电路的集成度指的是单个集成电路所含电子元件(如晶体管、电阻、电容等)的数目多少 B)根据集成度的高低,集成电路可以分为小规模、中规模、大规模、超大规模和极大规模等几种 C)嵌入式系统中使用的处理器芯片属于大规模集成电路 D)集成电路的制造工艺复杂且技术难度非常高,许多工序必须在恒温、恒湿、超洁净的无尘厂房内完成 (1)什么是预编译,何时需要预编译: 答案: 1、总是使用不经常改动的大型代码体。 2、程序由多个模块组成,所有模块都使用一组标准的包含文件和相同的编译选项。在这种情况下,可以将所有包含文件预编译为一个预编译头。 (2)char * const p char const * p const char *p 上述三个有什么区别? 答案: char * const p; //常量指针,p的值不可以修改 char const * p;//指向常量的指针,指向的常量值不可以改const char *p;//和char const *p (3)char str1[] = "abc"; char str2[] = "abc"; const char str3[] = "abc"; const char str4[] = "abc"; const char *str5 = "abc"; const char *str6 = "abc"; char *str7 = "abc"; char *str8 = "abc"; cout < < ( str1 == str2 ) < < endl; cout < < ( str3 == str4 ) < < endl; cout < < ( str5 == str6 ) < < endl; cout < < ( str7 == str8 ) < < endl; 结果是:0 0 1 1 str1,str2,str3,str4是数组变量,它们有各自的内存空间;而str5,str6,str7,str8是指针,它们指向相同的常量区域。 (4)以下代码中的两个sizeof用法有问题吗? [C易] void UpperCase( char str[] ) // 将str 中的小写字母转换成大写字母{ for( size_t i=0; i 1.下面哪一种工作模式不属于ARM特权模式( A )。 A.用户模式B.系统模式C.软中断模式D.FIQ模式 2.ARM7TDMI的工作状态包括( D )。 A.测试状态和运行状态B.挂起状态和就绪状态 C.就绪状态和运行状态D.ARM状态和Thumb状态 3.下面哪个Linux操作系统是嵌入式操作系统( B )。 A.Red-hat Linux B.uclinux C.Ubuntu Linux D.SUSE Linux 4.使用Host-Target联合开发嵌入式应用,( B )不是必须的。 A.宿主机B.银河麒麟操作系统 C.目标机D.交叉编译器 5.下面哪个不属于Linux下的一个进程在内存里的三部分的数据之一( A )。 A.寄存器段B.代码段 C.堆栈段D.数据段 选择题(共5小题,每题2分,共10分) 1.下面哪个系统属于嵌入式系统( D )。 A.“天河一号”计算机系统B.IBMX200笔记本电脑 C.联想S10上网本D.Iphone手机 2.在Makefile中的命令必须要以( A )键开始。 A.Tab键B.#号键 C.空格键D.&键 3.Linux支持多种文件系统,下面哪种不属于Linux的文件系统格式( B )。 A.Ext B.FAT32 C.NFS D.Ext3 4.下面哪种不属于VI三种工作模式之一( D )。 A.命令行模式B.插入模式 C.底行模式D.工作模式 5.下面哪一项不属于Linux内核的配置系统的三个组成部分之一( C )。 A.Makefile B.配置文件(config.in) C.make menuconfig D.配置工具 1.人们生活中常用的嵌入式设备有哪些?列举4个以上(1) 手机,(2) 机顶盒,(3) MP3,(4) GPS。(交换机、打印机、投影仪、无线路由器、车载媒体、PDA、GPS、智能家电等等。) 2.ARM9处理器使用了五级流水线,五级流水具体指哪五级:(5) 取指,(6) 译码,(7) 执行,(8) 缓冲/数据,(9) 回写。 3.在Makefile中的命令必须要以(10) Tab 键开始。 4.Linux支持多种文件系统,主要包括哪些(写出其中4中就行)(11) Ext,(12) VFAT,(13) JFS,(14) NFS。(JFS、ReiserFS、Ext、Ext2、Ext3、ISO9660、XFS、Minx、MSDOS、UMSDOS、VFAT、NTFS、HPFS、NFS、SMB、SysV、PROC等) 5.VI的工作模式有哪三种:(15) 命令行模式,(16) 插入模式,(17) 底行模式。 嵌入式系统开发技术题库第3套 一、选择题 1:与个人计算机(PC)相比,嵌入式系统具有许多不同的特点。下面不属于嵌入式系统特点的是()。A:嵌入式系统与具体应用紧密结合,具有很强的专用性 B:嵌入式系统通常包含在非计算机设备(系统)中,具有隐蔽性 C:嵌入式系统的软硬件资源往往受到严格的限制 D:嵌入式系统性能较低,价格也比较便宜 2:嵌入式系统中的CPU具有一些与通用计算机所使用的CPU不同的特点,下面不是其特点的是()。A:支持实时处理 B:低功耗 C:高主频 D:集成了测试电路 3:嵌入式系统使用的片上系统英文缩写名为SoC,下面关于SoC叙述中错误的是()。 A:SoC也称为系统级芯片,它是电子设计自动化水平的提高和集成电路制造技术飞速发展的产物 B:SoC芯片中既包含数字电路,也可以包含模拟电路,甚至还能包含数字/模拟混合电路和射频电路C:SoC将嵌入式系统的几乎全部功能都集成在一块芯片中,单个芯片就能实现数据的采集、转换、存储、处理和I/O等多种功能 D:SoC的设计制造难度很大,目前还没有得到广泛使用 4:微电子技术特别是集成电路制造技术是嵌入式系统发展的重要基础,下面关于集成电路的叙述中错误的是()。 A:集成电路的集成度指的是单个集成电路所含电子元件(如晶体管、电阻、电容等)的数目多少 B:根据集成度的高低,集成电路可以分为小规模、中规模、大规模、超大规模和极大规模等几种 C:嵌入式系统中使用的处理器芯片属于大规模集成电路 D:集成电路的制造工艺复杂且技术难度非常高,许多工序必须在恒温、恒湿、超洁净的无尘厂房内完成 5:文字信息是人们用以表达和传递信息的媒体之一,大多数嵌入式系统都必须处理文字信息。下面关于文字信息的表示及其处理的叙述中,错误的是()。 A:目前使用最广泛的西文字符集是ASCII字符集,它包含96个可打印字符 B:GB2312是我国目前广泛使用的汉字编码国家标准之一 C:GB2312包括6000多汉字,但不包含西文、俄文等其他字符 D:GB2312字符集中的汉字与符号在系统中采用双字节表示 6:假设一台数码相机一次可拍摄16位色1024 x 1024的彩色相片共80张,数据压缩比平均是4,则它使用的存储器容量大约是()。 A:40MB B:60MB C:80MB D:120MB 7:在数字音频信息数字化过程中,正确的处理顺序是()。 A:量化、取样、编码 B:取样、编码、量化 C:取样、量化、编码 D:编码、取样、量化 8:互联网借助TCP/IP协议把许多同构或异构的计算机网络互相连接起来,实现了遍布全球的计算机的互连、互通和互操作,其中的IP协议起着关键性的作用。下面有关IP协议的叙述中,错误的是()。 1. Linux文件权限一共10位长度,分成四段,第三段表示的内容是。 A 文件类型 B 文件所有者的权限 C 文件所有者所在组的权限 D 其他用户的权限 2. 终止一个前台进程可能用到的命令和操作。 A kill B 《嵌入式系统》试题库 《嵌入式系统》试题库 一、填空题 嵌入式系统的基本定义为:以应用中心,以计算机技术为基础,软件硬件可裁剪,适、 1应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。从模块结构来看,嵌入式系统由三大部分组成,分别是:硬件、软件和开发平台。、 2从层次角度来看,嵌入式 系统由四大部分组成,分别是:应用软件层、操作系统层、、 3板级支持包(或硬件抽象层) 和硬件层。嵌入式产品的主要度量指标包括:上市时间、设计成本和产品质量。、 4嵌入式系统的设计过程包括:需求分析、规格说明、体系结构设计、构件设计、系统、 5集成和系统测试。需求分析包括:功能性需求分析和非功能性需求分析。 6、确定输入信号是数字信号还 是模拟信号属于功能性需求。 7、确定系统的物理尺寸和重量属于非功能性需求。 8、在嵌 入式系统的设计过程中,其中规格说明解决“做什么”。 9、在嵌入式系统的设计过程中,其 中体系结构设计解决“如何做”。 10、在嵌入式系统的设计过程中,软硬件划分应该在体系结构设计阶段完成。 11、在嵌入式系统的设计过程中,处理器的选择应该在体系结构设计阶段 完成。、 12在嵌入式系统的设计过程中,嵌入式操作系统的选择应该在体系结构设计阶段完成。、13在嵌入式系统的设计过程中,完成原理图设计应在构件设计阶段完成。、 14在嵌入式系统 的设计过程中,完成版图设计应在构件设计阶段完成。、15在嵌入式系统的设计过程中,完 成软件设计应在构件设计阶段完成。 16、反映嵌入式系统设计人员的水平能力主要在于总体 设计(需求分析、规格说明和体系 17、结构设计)和系统调试。设计流程指的是设计过程中所经历的过程步骤。、 18核的模块级重用和基于平台的系统级重用。 IP 设计重用技术主要分为基于19、 软硬件协同设计由系统描述、软硬件划分、软硬件协同综合以及软硬件协同模拟与验 20、证几个阶段组成。嵌入式处理器的分类包括三种,分别是:嵌入式微处理器、微控制器(或单片机)和、21页共页第 1 44 《嵌入式系统》试题库 嵌入式系统试卷及答案 2014年上学期11级计算机专业嵌入式系统期末试卷 专业班级学号姓名___ _____ 考试时间120分钟考试方式闭卷考试成绩__________ _ 题号一二三四五六 得分 一、选择题(本大题共10个小题,每小题1分,共10分) 1、和PC机系统相比,下列哪点不是嵌入式系统所特有的:( C) A、系统内核小 B、专用性强 C、可执行多任务 D、系统精简 2、ADD R0,R1,#3属于( A)寻址方式。 A、立即寻址 B、多寄存器寻址 C、寄存器直接寻址 D、相对寻址 3、GET伪指令的含义是:(A) A、包含一个外部文件 B、定义程序的入口 C、定义一个宏 D、声明一个变量 4、μCOS-II操作系统不属于:(C) A、RTOS B、占先式实时操作系统 C、非占先式实时操作系统 D、嵌入式实时操作系统 5、FIQ中断的入口地址是:(A) A、0x0000001C B、0x00000008 C、0x00000018 D、0x00000014 6、ARM指令集和Thumb指令集分别是(D)位的。 A、8位,16位 B、16位,32位 C、16位,16位 D、32位,16位 7、BL和BX的指令的区别是( D ) A、BL是跳转并切换状态;BX带返回的跳转并切换状态。 B、BL是带返回的连接跳转;BX带返回的跳转并切换状态。 C、BL是跳转并切换状态;BX是带返回的连接跳转。 D、BL是带返回的连接跳转;BX是跳转并切换状态。 8、Boot Loader 的启动过程是( A ) A.单阶段 B. 多阶段 C.单阶段和多阶段都有 D.都不是 9、以下说法不正确的是( B ) A 、任务可以有类型说明 B 、任务可以返回一个数值 C 、任务可以有形参变量 D 、任务是一个无限循环 10、若已定义的函数有返回值,则以下关于该函数调用叙述中错误的是(D) A、函数调用可以作为独立的语句存在 精品文档 10个小题,每小题1分,共10分)Array 1、以下说法不正确的是()。 A、任务可以有类型说明 B、任务可以返回一个数值 C、任务可以有形参变量 D、任务是一个无限循环 2、用图形点阵的方式显示一个16*16点阵汉字需要()字节。 A、8 B、32 C、16 D、64 3、μCOS-II操作系统中最多可以管理()个任务。 A、64 B、56 C、128 D、63 4、存储一个32位数0x2168465到2000H~2003H四个字节单元中,若以大端模式存 储,则2000H存储单元的内容为()。d A、0x21 B、0x68 C、0x65 D、0x02 5、以ARM为内核的微处理器是()位的。d A、4位 B、8位 C、16位 D、32位 6、RS232-C串口通信中,表示逻辑1的电平是()。d A、0v B、3.3v C、+5v~+15v D、-5v~-15v 7、寄存器R14除了可以做通用寄存器外,还可以做()。b A、程序计数器 B、链接寄存器 C、栈指针寄存器 D、基址寄存器 8、IRQ中断的入口地址是()。 A、0x00000000 B、0x00000008 C、0x00000018 D、0x00000014 9、采用RS232-C串行通信至少需要三根线,其中不包括()。 A、电源线 B、地线 C、发送数据线 D、接收数据线 10、Unicode编码与()编码方式兼容。 A、ASCII码 B、GBK C、GB2312 D、区位码 二、填空题(本大题共24个空,每空1分,共24分) 11、发展到现在,常用的操作系统包括三大类,分别为:批处理系统、分 时系统、和实时系统。 12、在图形操作系统中,字符通常有两种存储方式:一种是方式;一种是 方式。在嵌入式开发系统中一般使用方式。 13、ARM7指令系统采用三级流水线指令,分别包括:、、 和。 14、ARM处理器有七种工作模式,分别为、、、、 、、和状态。见第二套题的19题 15、OSTaskSuspend (self)可把正在运行的任务挂起,参数self指任务本 身。 用此函数挂起的任务可通过 OSTaskResume 函数唤醒。 16、创建信号量OSSemCreat(0)函数中,参数0表示信号量的初始值。 17、若一个优先级为35的任务就绪,则在就绪表中,OSRdyTbl[]的 2 置位, 变量OSRdyGrp的 4 置位。 18、网络通信中面向连接的协议是____tcp____,面向无连接的协议是___udp_____。 三、简答题(本大题共4个小题,每小题5分,共20分) 19、简述进程和线程有什么区别,μCOS-II操作系统中的任务属于进程还是线程?进程:包含正在运行的一个程序的所有状态信息,包括程序的代码、程序的数据、PC值、一组通用的寄存器的当前值,堆、栈,一组系统资源(如打开的文件)。进程有动态性、独立性、并发性的特点。 线程:是较进程更小的能独立运行的基本单位,是进程当中的一条执行流程,它可以满足统一进程内不通实体间的并发执行而又共享相同的地址空间。 一个进程中可以同时存在多个线程 各个线程之间可以并发地执行 嵌入式系统复习题 ARM复习题一 一、填空。 1、cpsr寄存器的作用是___________。 2、ARM926EJ-S中的“9”表示的含义是________,“E”表示的含义是________,“J”表示的含义是________。 3、LINUX下察看当前目录的命令是________,察看文件内容的命令是 ________,删除目录的命令是________。 4、字数据的高字节存储在低地址中,而字数据的低字节则存放在高地址中,这样的存储方式我们称之为__________格式。 5、ARM9TDMI中的“T”表示的含义是_支持Thumb指令集__,“D”表示的含义是_支持片上Debug__,“M”表示的含义是__ 内嵌硬件乘法器___ ,“I”表示的含义是__支持片上断点调试___。 6、ARM指令中的第二个操作数“operand2”有_立即数__、_寄存器__、__寄存器移位__三种具体形式。 7、字数据的高字节存储在低地址中,而字数据的低字节则存放在高地址中,这样的存储方式我们称之为__大端___格式。 8、LINUX下察看当前目录的命令是__ls__,察看文件内容的命令是 __cat____,压缩与解压的命令是__tar____,磁盘、目录挂接命令是 __mount__。 9、LINUX将设备分成__块设备____和___字符设备_______两大类。 二、简答。 1、简述嵌入式系统和通用计算机的区别? 2、VFS的功能有哪些? 记录可用的文件系统的类型; 将设备同对应的文件系统联系起来; 处理一些面向文件的通用操作 3、简述硬实时操作系统和软实时操作系统的区别? 4、简述嵌入式系统的开发模式。 5、交叉编译工具(链)主要包括什么? 对目标系统的编译器 gcc、目标系统的二进制工具binutils、目标系统 选择题: 1、下面哪一种工作模式不属于特权模式()。 A、用户模式 B、系统模式 C、软中断模式 D、模式 3、920T的工作状态包括()。 A、测试状态和运行状态 B、挂起状态和就绪状态 C、就绪状态和运行状态 D、状态和状态 4、232串口通信中,表示逻辑1的电平是()。 A、0v B、3.3v C、+5v~+15v D、-5v~-15v 5、汇编语句“ R0, R2, R3, 1”的作用是()。 A. R0 = R2 + (R3 << 1) B. R0 =( R2<< 1) + R3 C. R3= R0+ (R2 << 1) D. (R3 << 1)= R0+ R2 6、I2C协议中有几根线() A.1 B.2 C.3 C.4 7、指令“ R0!, {R1, R2, R3, R4}”的寻址方式为()。 A、立即寻址 B、寄存器间接寻址 C、多寄存器寻址 D、堆栈寻址 9、232C串行通信总线的电气特性要求总线信号采用()。 A、正逻辑 B、负逻辑 C、高电平 D、低电平 10、下面哪种操作系统不属于商用操作系统。 ( ) A. B. C. D. 11. 下面哪点不是嵌入式操作系统的特点。 ( ) / 22 A. 内核精简 B. 专用性强 C. 功能强大 D. 高实时性 12. 下面哪种不属于嵌入式系统的调试方法。 ( ) A. 模拟调试 B. 软件调试 C. 调试 D. 单独调试 13. 在嵌入式处理器中,下面哪种中断方式优先级最高。 ( ) A. B. 数据中止 C. D. 14. 和的说法正确的是。 ( ) A. 的读速度比稍慢一些 B. 的写入速度比慢很多 C. 的擦除速度远比的慢 D.大多数写入操作需要先进行擦除操作 15. 下面哪种嵌入式操作系统很少用在手机上。 ( ) A. B. C. D. 16、0x17&0x11的运算结果是。 ( ) A.0x01 B.0x11 C.0x17 D.0x07 17、以下哪种方式不属于文件系统的格式。 ( ) 18、下面哪个特点不属于设备的特点。 ( ) A.串行通信方式 B.不可热拨插 C.分、和 D.通信速率比串口快 19、寄存器中反映处理器状态的位是() 位位位位 嵌入式试题(大全) 1、ARM汇编语言与c++的混合编程通常用以下哪几种方式在C/C++代码中嵌入汇编指令、在汇编程序和C/C++的程序之间进行变量的互访、汇编程序、C/C++程序间的相互调用。 2、嵌入式处理器可以分为微控制器,微处理器,数字信号处理器,片上系统。P8 3、目前世界上的四大嵌入式处理器内核分别是MIPS内核、ARM内核、PowerPC内核、68/OOLDFIRE核。P30 4、ARM微处理器中支持字节(8位),半字(16位),字(32位),3种数据类型其中字需要4字节对齐,半字需要2字节对齐。P43 5、S3C2410X-/S3C2440X是三星公司出品的基于ARM920T核的嵌入式微处理器,它与基于ARM的S3C44BOX 的最大区别在于,S3C24/OX/S3C244OX内部带有全性能的内存管理单元(MMU)。P12 6、ARM7TDMI采用冯*诺依曼结构,因此对存储器的控制没有专门的存储管理单元,存储器采用间的而直接的地址方式来表示实际的物理地址,没有进行段式页的转换。P50 7、LIMUX内核包含进程调度、内存管理、文件系统、进程间通信,网络及资源管理部分。P256 8、嵌入式系统地3个基本要素是嵌入性,专用性,计算机系统,P1 嵌入式系统发展的4个阶段分别是以单片机为核心的低级嵌入式系统,以嵌入式微处理器为基础的初级嵌入式系统,以嵌入式操作系统为标志的中级嵌入式系统,以Internet为标志的高级嵌入式系统。P3 9、嵌入式系统的硬件有电源模块,嵌入式处理器,存储器模块,可编程逻辑器件,嵌入式系统周边元器件,各种I/O接口,总线以及外部设备和插件等组成。嵌入式系统的软件包括中间层程序、嵌入式操作系统、应用软件以及实际后用程序层。P6--7 10、目前世界上的四大嵌入式处理器内核分别是MIPS内核,ARM内核,PowerPC内核,68K/COLDFIRE 内核。P30 11、ARM处理器工作在不同模式,使用的寄存器有所不同,其共同点是无论何种模式,R15均作为PC使用,CPSR 为当前程式状态寄存器;R7~R0 为公用的通用寄存器。不同之处在于高端7个通用寄存器和转台寄存器在不同模式下不同。P35 12、S3C44BOX内部除ARM7TDMI内核处,还包括许多可编程外围设备组建,这些外围设备组件的可编程功能均是通过各个可编程外围设备组件中的相关控制寄存器来完成设置的。 13、嵌入式系统地调试工具有:指令集模拟器,驻留监控软件,JTAG仿真器,在线仿真器。P23 14、嵌入式系统简单的说就是嵌入到目标体系中的专用计算机系统。P1 15、ARM微处理器的工作状态有两种:ARM状态和THUMB状态,其中ARM 是指ARM工作于32位指令状态,THUMB 是指ARM执行16位的THUMB指令状态,二者的状态转换是通过BX指令完成的。P33 简答题 1、基于ARM体系结构的嵌入式处理器具有哪些技术特征?并对每种技术特征予以简单的说明。P33 答:(1)单周操作:ARM指令系统在一个机器周期内完成简单和基本的操作。 (2)采用加载/存储指令结构:存储器访问指令的执行时间长,因此只采用了加载和存储两种指令对存储器进行读和写的操作,面向运算部件的操作都经过加载指令和存储指令,从存储器取出后预先存放到寄存器对内,以加快执行速度。(3)固定的32位长度指令:指令格式固定为32位长度,使指令译码结构简单,效率提高。 (4)3地址指令格式:采用三地址指令格式、较多寄存器和对称的指令格式便于生成优化代码,降低编译开销(5)指令流水线技术:ARM采用多级流水线技术,以提高指令执行的效率。 2、请你从技术的角度和系统地角度给出嵌入式系统的定义。P1 以应用为中心,计算机技术为基础,软硬件可剪裁,适应应用系统对功能,成本,体积,可靠性,功耗严格要求的计算机系统。 3、uCLinux内核移植包括哪些主要任务?并对每个任务进行简单的说明。P286 (1)配置内核。uCLinux常用的配置选项包括系统及其存储器配置、网络支持、USB支持、显示器支持以及触摸支持等。 (2)编译内核。编译内核主要包括使用Make Dep建立依赖关系、使用Make编译内核、使用MakezImage编译压缩核 心(zImage)。 (3)下载、运行、调试内核。可以通过调试器下载内核并运行,也可以通过Boot Loader将内核烧写到FLASH中,然 后运行uCLinux。 4、请你说明系统从异常处理程序中返回需要执行哪些操作?P40 (1)恢复原来被保护的用户寄存器 (2)将SPSR_mode寄存器值复制到CPSR中,使得CPSR从相应的SPSR中恢复,以恢复被中断的程序工作状态。 (3)根据异常类型将PC值恢复成断点地址,以执行用户原来运行着的程序。 (4)清除CPSR中的中断禁止标志I和F,开放外部中断和快速中断。 嵌入式系统2012考 试试题 (本大题共10个小题,每小题1分,共10分) 1、以下说法不正确的是()。 A、任务可以有类型说明 B、任务可以返回一个数值 C、任务可以有形参变量 D、任务是一个无限循环 2、用图形点阵的方式显示一个16*16点阵汉字需要()字节。 A、8 B、32 C、16 D、64 3、μCOS-II操作系统中最多可以管理()个任务。 A、64 B、56 C、128 D、63 4、存储一个32位数0x2168465到2000H~2003H四个字节单元中,若以大端模式 存储,则2000H存储单元的内容为()。d A、0x21 B、0x68 C、0x65 D、0x02 5、以ARM为内核的微处理器是()位的。d A、4位 B、8位 C、16位 D、32位 6、RS232-C串口通信中,表示逻辑1的电平是()。d A、0v B、3.3v C、+5v~+15v D、-5v~-15v 7、寄存器R14除了可以做通用寄存器外,还可以做()。b A、程序计数器 B、链接寄存器 C、栈指针寄存器 D、基址寄存器 8、IRQ中断的入口地址是()。 A、0x00000000 B、0x00000008 C、0x00000018 D、0x00000014 9、采用RS232-C串行通信至少需要三根线,其中不包括()。 A、电源线 B、地线 C、发送数据线 D、接收数据线 10、Unicode编码与()编码方式兼容。 A、ASCII码 B、GBK C、GB2312 D、区位码 二、填空题(本大题共24个空,每空1分,共24分) 11、发展到现在,常用的操作系统包括三大类,分别为:批处理系统、 分时系统、和实时系统。 12、在图形操作系统中,字符通常有两种存储方式:一种是方式;一种是 方式。在嵌入式开发系统中一般使用方式。 13、ARM7指令系统采用三级流水线指令,分别包括:、、 和。 14、ARM处理器有七种工作模式,分别为、、、、 、、和状态。见第二套题的19题 15、OSTaskSuspend (self)可把正在运行的任务挂起,参数self指任务本身。 《嵌入式系统》试题库 一、填空题 1、嵌入式系统的基本定义为:以应用中心,以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 2、从模块结构来看,嵌入式系统由三大部分组成,分别是:硬件、软件和开发平台。 3、从层次角度来看,嵌入式系统由四大部分组成,分别是:应用软件层、操作系统层、板级支持包(或硬件抽象层)和硬件层。 4、嵌入式产品的主要度量指标包括:上市时间、设计成本和产品质量。 5、嵌入式系统的设计过程包括:需求分析、规格说明、体系结构设计、构件设计、系统集成和系统测试。 6、需求分析包括:功能性需求分析和非功能性需求分析。 7、确定输入信号是数字信号还是模拟信号属于功能性需求。 8、确定系统的物理尺寸和重量属于非功能性需求。 9、在嵌入式系统的设计过程中,其中规格说明解决“做什么”。 10、在嵌入式系统的设计过程中,其中体系结构设计解决“如何做”。 11、在嵌入式系统的设计过程中,软硬件划分应该在体系结构设计阶段完成。 12、在嵌入式系统的设计过程中,处理器的选择应该在体系结构设计阶段完成。 13、在嵌入式系统的设计过程中,嵌入式操作系统的选择应该在体系结构设计阶段完成。 14、在嵌入式系统的设计过程中,完成原理图设计应在构件设计阶段完成。 15、在嵌入式系统的设计过程中,完成版图设计应在构件设计阶段完成。 16、在嵌入式系统的设计过程中,完成软件设计应在构件设计阶段完成。 17、反映嵌入式系统设计人员的水平能力主要在于总体设计(需求分析、规格说明和体系结构设计)和系统调试。 18、设计流程指的是设计过程中所经历的过程步骤。 19、设计重用技术主要分为基于IP 核的模块级重用和基于平台的系统级重用。 20、软硬件协同设计由系统描述、软硬件划分、软硬件协同综合以及软硬件协同模拟与验证几个阶段组成。 21、嵌入式处理器的分类包括三种,分别是:嵌入式微处理器、微控制器(或单片机)和 学习中心/函授站_ 姓名学号 西安电子科技大学网络与继续教育学 院 2014学年下学期 《嵌入式系统》期末考试试题 (综合大作业) 题号一二三四五总分 题分2010302020 得分 考试说明: 1、大作业于2014年12月25日下发,2015年1月10日交回; 2、考试必须独立完成,如发现抄袭、雷同均按零分计; 3、答案须手写完成,要求字迹工整、卷面干净。 一、问题简述(每小题4分,共20分) 1、简述嵌入式系统的定义和组成结构。 答:嵌入式系统是以应用为中心,以计算机技术为基础,并软硬件可剪裁、功能、 ,可靠性、体积、重量、成本、功耗、成本、安装方式等方面符合要求的专用计算机系统。 嵌入式系统一般由嵌入式微处理器、存储与I/O部分、外设与执行部分、嵌入式软件等四个部分组成。 2、简单说明ARM微处理器的特点。 答:(1) 体积小、低功耗、低成本、高性能。 (2) 支持Thumb(16位)/ARM(32位)双指令集,能很好地兼 容8位/16位器件。 (3) 大量使用寄存器,指令执行速度更快。 (4) 大多数数据操作都在寄存器中完成,通过Load/Store结 构在内存和寄存器之间批量传递数据。 (5) 寻址方式灵活简单,执行效率高。 (6) 指令长度固定。 3、简述嵌入式系统产品的设计和开发过程。 答:①在嵌入式系统的开发过程中,一般采用的方法是首先在通用PC机上的集成开发环境中编程;②然后通过交叉编译和链接,将程序转换成目标平台(嵌入式系统)可以运行的二进制代码;③接着通过嵌入式调试系统调试正确;④最后将程序下载到目标平台上运行。 要强调,选择合适的开发工具和调试工具,对整个嵌入式系统的开发都非常重要。 4、简述嵌入式系统设计中要考虑的因素。 答:在嵌入式系统的开发过程中,要考虑到实时性、可靠性、稳 定性、可维护性、可升级、可配置、易于操作、接口规范、抗干 扰、物理尺寸、重量、功耗、成本、开发周期等多种因素。 5、什么是BootLoader,了解其在嵌入式系统中作用。 答:就是启动载入或引导加载又叫自举装载。由于系统加电后需 要首先运行BootLoader这段程序,因此它需要放在系统加电后 最先取指令的地址上。嵌入式处理器的生产厂商都为其处理器预 先安排了一个在系统加电或复位后最先取指令的地址。 二、名词解释(每小题2分,共10分) 1、DSP(Digital Signal Processor),数字信号处理器,一种特别用于快速处理数字信号的微处理器。DSP处理器对系统结构和指令进行了特殊设计,使其适合于执行DSP算法,编译效率较高,指令执行速度也较高。 2、RTOS Real Time Operating System. 译为实时操作系统。实时系统是指一个能够在指定的或者确定的时间内,实现系统功能和对外部或内部、同步或异步事件作出响应的系统。 3、BSP设计板级支持包(BSP)的目的主要是为驱动程序提供访问硬件设备寄存器的函数包,从而实现对操作系统的支持。类似于PC机上的BIOS,是一个承上启下的软件层次。由嵌入OS和用户开发相结合取得。BSP一般是在嵌入式系统上固化存放。 4、总线竞争就是在同一总线上,同一时刻,有两个以上器件要通嵌入式系统期末考试题库及答案
嵌入式系统期末考试试卷 习题
嵌入式系统第三套试题
华为经典嵌入式面试题集资料
嵌入式系统期末考试试卷 习题
嵌入式系统开发技术试题库
嵌入式期末考试题库大全
嵌入式系统期末考试题库及答案
嵌入式系统试卷及答案
(整理)嵌入式系统考试试题.
嵌入式系统考试题库
嵌入式选择题整理题库
嵌入式试题库
最新嵌入式系统考试试题
最新嵌入式系统期末考试题库及答案
嵌入式系统模拟试题及答案
相关主题
文本预览