
运动分析源程序
#include "stdio.h"
#include "math.h"
#define PI 3.1415926
void main()
{ double a=0.4,b=0.2,L1=0.1,L2=0.34,L3=0.3,L4=0.28,z3=0.15,L6=0.4472;
double Q1,Q2,Q3,Q4,L5,Q6=5.8195;
double W1=2*PI*420/60,W2,W3,W4,V5;
double E2,E3,E4,a5;
double A,B,C;
int x;
scanf("%d",&x);
Q1=x;
Q1=Q1*PI/180;
A=2*L1*L2*sin(Q1)-2*L6*L2*sin(Q6);
B=2*L1*L2*cos(Q1)-2*L2*L6*cos(Q6);
C=L1*L1+L2*L2+L6*L6-L3*L3-2*L1*L6*cos(Q1-Q6);
Q2=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));
if(Q1>52.685*PI/180&&Q1<335.387*PI/180)
Q3=PI-asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);
else
Q3=asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);
W2=-W1*L1*sin(Q1-Q3)/(L2*sin(Q2-Q3));
W3=W1*L1*sin(Q1-Q2)/(L3*sin(Q3-Q2));
E2=(-W1*W1*L1*cos(Q1-Q3)-W2*W2*L2*cos(Q2-Q3)+W3*W3*L3)/( L3*sin(Q2-Q3));
E3=(W1*W1*L1*cos(Q1-Q2)+W2*W2*L2-W3*W3*L3*cos(Q3-Q2))/(L 3*sin(Q3-Q2));
Q4=PI-asin(z3*sin(Q3)/L4);
L5=z3*cos(Q3)-L4*cos(Q4);
W4=z3*W3*cos(Q3)/(L4*cos(Q4));
E4=(L4*W4*W4*sin(Q4)+z3*E3*cos(Q3)-z3*W3*W3*sin(Q3))/(L4*cos (Q4));
V5=z3*W3*cos(Q3)*tan(Q4)-z3*W3*sin(Q3);
a5=L4*(E4*sin(Q4)+W4*W4*cos(Q4))-z3*(E3*sin(Q3)+W3*W3*cos(Q3));
Q1=Q1*180/PI;
Q3=Q3*180/PI;
Q2=Q2*180/PI;
Q4=Q4*180/PI;
printf("Q1=%f\tV5=%f\ta5=%f\n",Q1,V5,a5);
}
运行结果
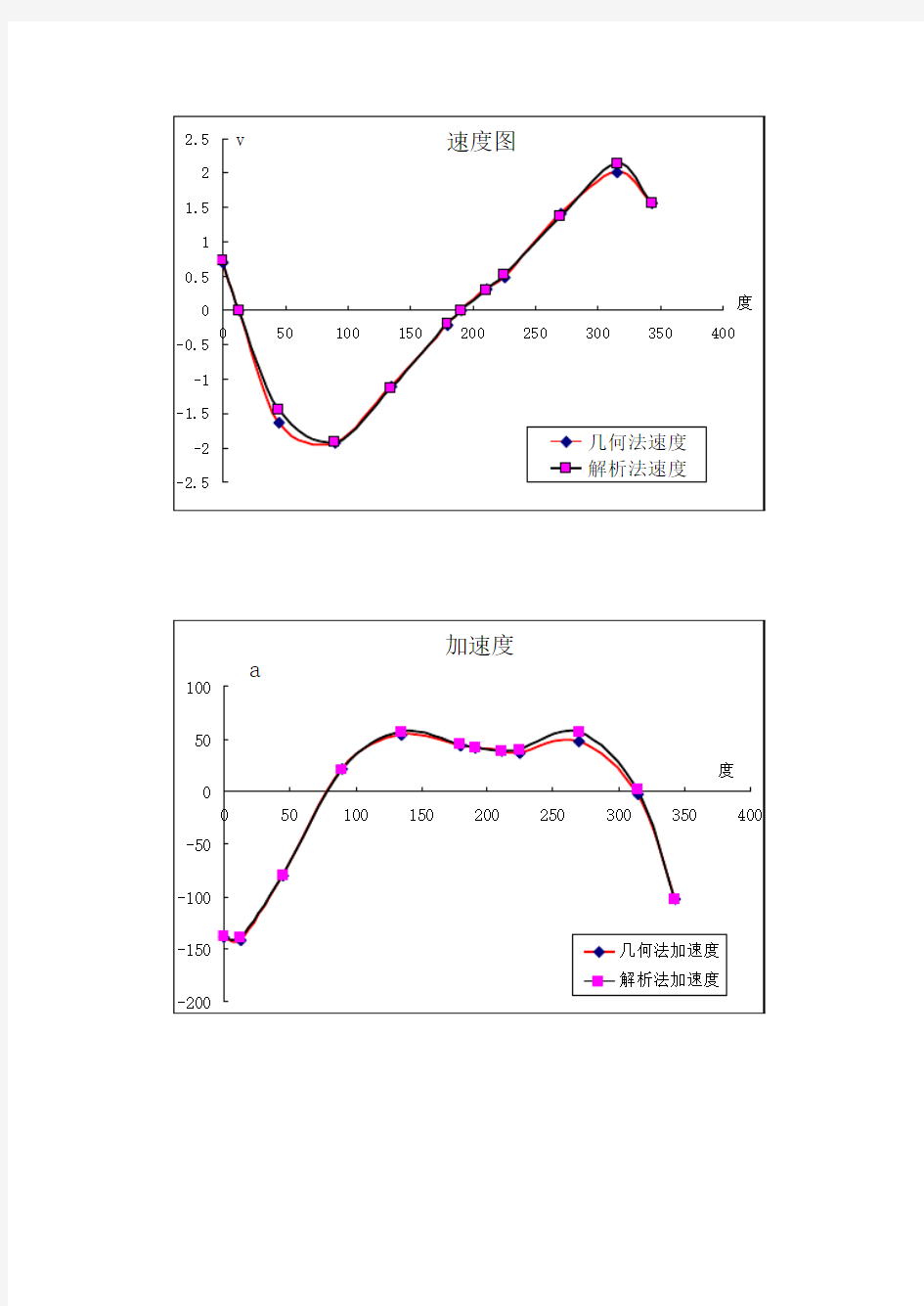
Q1=0.000000 V5=0.723117 a5=-138.562170 Q1=45.000000 V5=-1.453729 a5=-80.061441 Q1=90.000000 V5=-1.929183 a5=20.042530 Q1=135.000000 V5=-1.139577 a5=56.642956 Q1=180.000000 V5=-0.205239 a5=44.695398 Q1=225.000000 V5=0.512321 a5=39.975979 Q1=270.000000 V5=1.362726 a5=56.223212 Q1=315.000000 V5=2.128956 a5=1.304283 Press any key to continue
极位:
Q1=13.000000 V5=-0.002777 a5=-139.309541 Q1=191.000000 V5=-0.018039 a5=41.257996 左极位后20°:
Q1=211.000000 V5=0.295342 a5=38.588547 右极位前30°:
Q1=343.000000 V5=1.560056 a5=-103.074286
受力分析源程序
#include "stdio.h"
#include "math.h"
#define PI 3.1415926
main(int)
{ double a=0.4,b=0.2,L1=0.1,L2=0.34,L3=0.3,L4=0.28,z3=0.15,L6=0.4472;
double Q1,Q2,Q3,Q4,L5,Q6=5.8195;
double W1=2*PI*420/60,W2,W3,W4,V5;
double E2,E3,E4,a5;
doublef45x,f45y,f34x,f34y,f23x,f23y,f36x,f36y,f12x,f12y,f16x,
f16y,M0,as4x,as4y,as3x,as3y,Pr;
double m3=11,m4=10,m5=11,Lds3=0.07,Les4=0.14,Js3=0.02,Js4=2.8, g=9.8;
double A,B,C;
int x;
scanf("%d",&x);
Q1=x;
Q1=Q1*PI/180;
A=2*L1*L2*sin(Q1)-2*L6*L2*sin(Q6);
B=2*L1*L2*cos(Q1)-2*L2*L6*cos(Q6);
C=L1*L1+L2*L2+L6*L6-L3*L3-2*L1*L6*cos(Q1-Q6);
Q2=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));
if(Q1>52.685*PI/180&&Q1<335.387*PI/180)
Q3=PI-asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);
else
Q3=asin((L1*sin(Q1)+L2*sin(Q2)-L6*sin(Q6))/L3);
W2=-W1*L1*sin(Q1-Q3)/(L2*sin(Q2-Q3));
W3=W1*L1*sin(Q1-Q2)/(L3*sin(Q3-Q2));
E2=(-W1*W1*L1*cos(Q1-Q3)-W2*W2*L2*cos(Q2-Q3)+W3*W3*L3)/( L3*sin(Q2-Q3));
E3=(W1*W1*L1*cos(Q1-Q2)+W2*W2*L2-W3*W3*L3*cos(Q3-Q2))/(L 3*sin(Q3-Q2));
Q4=PI-asin(z3*sin(Q3)/L4);
L5=z3*cos(Q3)-L4*cos(Q4);
W4=z3*W3*cos(Q3)/(L4*cos(Q4));
E4=(L4*W4*W4*sin(Q4)+z3*E3*cos(Q3)-z3*W3*W3*sin(Q3))/(L4*cos( Q4));
V5=z3*W3*cos(Q3)*tan(Q4)-z3*W3*sin(Q3);
a5=L4*(E4*sin(Q4)+W4*W4*cos(Q4))-z3*(E3*sin(Q3)+
W3*W3*cos(Q3));
if(Q1<344*PI/180&&Q1>211*PI/180)
Pr=2100;
else
Pr=0;
as4y=0.5*L4*(E4*cos(Q4)-W4*W4*sin(Q4));
as4x=-0.5*L4*(sin(Q4)*E4+W4*W4*cos(Q4));
as3x=-Lds3*(sin(Q3)*E3+W3*W3*cos(Q3));
as3y=Lds3*(E3*cos(Q3)-W3*W3*sin(Q3));
f45x=Pr+m5*a5;
f45y=((m4*as4y*Les4+f45x*L4)*fabs(sin(Q4))-Js4*E4)/(L4*fabs(cos(Q4 )))-(m4*as4y*Les4+m4*g*Les4)/L4;
f34x=m4*as4x+f45x;
f34y=m4*as4y+m4*g+f45y;
f23y=((f34y*(L3-z3)+m3*as3x*(L3-Lds3)-(f34x+m3*as3x)*L3)*fabs(sin (Q3))-(f34y*(L3-z3)+m3*g*(L3-Lds3)+m3*as4y*(L3-Lds3))-Js3*E3*(1+L3)+ L3*fabs(sin(Q3))*(m3*as3x*Lds3+f34x*z3))/(L3*fabs(cos(Q3))*(1+L3))+(f3 4y+m3*as3y+m3*g+m3*as3y*Lds3+m3*g*Lds3+f34y*z3)/(1+L3);
f23x=m3*as3x*Lds3+f34x*z3-((m3*as3y*Lds3+m3*g*Lds3+f34y*z3-f23y*L 3)*fabs(cos(Q3))-Js3*E3)/fabs(sin(Q3));
f36x=f23x-f34x-m3*as4x;
f36y=f23y-f34y-m3*as3y-m3*g;
f12x=f23x;
f12y=f23y;
f16x=-f12x;
f16y=-f12y;
M0=L1*f12x*fabs(sin(Q1))+L1*f12y*fabs(cos(Q1));
Q1=Q1*180/PI;
Q3=Q3*180/PI;
Q2=Q2*180/PI;
Q4=Q4*180/PI;
printf("Q1=%f\nf12x=%f\tf12y=%f\tf16x=%f\nf16y=%f\tf23x=%f\tf23y=%f\n
f34x=%f\tf34y=%f\tf36x=%f\nf36y=%f\tf45x=%f\tf45y=%f\nM0=%f\n\n",Q1, f12x,f12y,f16x,f16y,f23x,f23y,f34x,f34y,f36x,f36y,f45x,f45y,M0);
}
运行结果:
Q1=0.000000
f12x=17.765709 f12y=10529.171093 f16x=-17.765709
f16y=-10529.171093 f23x=17.765709 f23y=10529.171093 f34x=-1498.449708 f34y=-473.952615 f36x=1487.907845
f36y=10853.632966 f45x=-1524.183865 f45y=-612.560480 M0=1052.917109
Q1=45.000000
f12x=15.620848 f12y=17655.996734 f16x=-15.620848
f16y=-17655.996734 f23x=15.620848 f23y=17655.996734 f34x=-914.893109 f34y=-1094.650815 f36x=968.152944
f36y=18698.355689 f45x=-880.675848 f45y=-1138.584446 M0=1249.572079
Q1=90.000000
f12x=-27.781326 f12y=-1593.917401 f16x=27.781326
f16y=1593.917401 f23x=-27.781326 f23y=-1593.917401 f34x=119.832516 f34y=-1631.799744 f36x=-36.914997
f36y=107.428967 f45x=220.467830 f45y=-1557.059526 M0=-2.778137
Q1=135.000000
f12x=1.746307 f12y=-274.537300 f16x=-1.746307
f16y=274.537300 f23x=1.746307 f23y=-274.537300 f34x=663.627931 f34y=918.859937 f36x=-706.492583 f36y=-1348.841579 f45x=623.072514 f45y=774.453110 M0=-19.289235
Q1=180.000000
f12x=72.496480 f12y=1096.595500 f16x=-72.496480
f16y=-1096.595500 f23x=72.496480 f23y=1096.595500 f34x=597.981897 f34y=2333.321630 f36x=-642.451182 f36y=-1559.912307 f45x=491.649383 f45y=2025.529900 M0=109.659550
Q1=225.000000
f12x=-1.187157 f12y=-801.303358 f16x=1.187157
f16y=801.303358 f23x=-1.187157 f23y=-801.303358 f34x=2615.855028 f34y=2725.805453 f36x=-2700.773366 f36y=-3776.191638 f45x=2539.735772 f45y=2490.192311 M0=-56.744652
Q1=270.000000
f12x=-71.339087 f12y=-3362.886346 f16x=71.339087
f16y=3362.886346 f23x=-71.339087 f23y=-3362.886346 f34x=2722.715707 f34y=1499.742106 f36x=-2798.741209 f36y=-4953.953835 f45x=2718.455329 f45y=1417.788811 M0=-7.133936
Q1=315.000000
f12x=-87.735770 f12y=-11506.494217 f16x=87.735770
f16y=11506.494217 f23x=-87.735770 f23y=-11506.494217 f34x=1995.868177 f34y=-679.023733 f36x=-1953.277114 f36y=-10738.478415 f45x=2114.347116 f45y=-585.343147 M0=-819.835789
Press any key to continue左极位
Q1=191.000000
f12x=70.835563 f12y=1079.995938 f16x=-70.835563
f16y=-1079.995938 f23x=70.835563 f23y=1079.995938 f34x=555.424372 f34y=2242.657616 f36x=-596.333863 f36y=-1479.131618 f45x=453.837960 f45y=1941.407675 M0=107.366944
右极位:
Q1=13.000000
f12x=16.035702 f12y=9226.154046 f16x=-16.035702
f16y=-9226.154046 f23x=16.035702 f23y=9226.154046
f34x=-1492.448849 f34y=-232.563603 f36x=1464.532845 f36y=9285.837683 f45x=-1532.404946 f45y=-393.953180 M0=899.329557
左极位后20°:
Q1=211.000000
f12x=56.037059 f12y=864.567500 f16x=-56.037059
f16y=-864.567500 f23x=56.037059 f23y=864.567500 f34x=511.929262 f34y=1915.024461 f36x=-552.092969 f36y=-1331.984141 f45x=424.474020 f45y=1647.809675 M0=76.994023
右极位前30°:
Q1=343.000000
f12x=-68.415863 f12y=-17870.261008 f16x=68.415863
f16y=17870.261008 f23x=-68.415863 f23y=-17870.261008 f34x=928.825780 f34y=22.246898 f36x=-956.148863 f36y=-17939.676255 f45x=966.182853 f45y=-16.696299
M0=-1710.941793
第一节、机械运动 1、 参照物:以某一物体为标准来判断另一物体的运动状态,这个标准就是参照物。相对于这个标准, 如果位置发生变化,则它是运动的,如果位置没有变化,则它是静止的。 2、 选择不同的参照物来观察同一个物体结论可能不同。同一个物体是运动还是静止取决于所选的参 照物,这就是运动和静止的相对性。 (没有绝对的静止或运动,只有相对静止或运动) 3、 机械运动:物理学里把物体空间位置变化叫做机械运动。 匀速直线运建 宜线运动一 变速直线运动 曲线运动 5、比较物体运动 快慢的方法: ⑴在相同的时间内比较通过的路程 ⑵在相同的路程内比较通过的时间 6、速度:物体在单位时间内通过的路程叫做速度。它是扌描述物体运动的快慢的物理量。 计算公式: 变形公式: 7、速度单位:国际单位:米/秒,符号:m/s ,读作:米每秒。常用单位:千米 /时,符号:km/h ,读 ⑤常识:人步行速度:米 /秒,自行车速度:4米/秒,汽车速度:30米/秒,光速:3X 108米/秒 第二节、 力的存在 & 力的概念:力是物体对物体的作用。 9、 力产生的条件:①必须有两个或两个以上的物体;②物体间必须有相互作用(不接触也能产生力, 如吸铁石;相互 接触的物体不一定产生力,如相互挨着的课桌) 10、 力的作用效果:①改变物体的形状(发生形变)②改变物体的运动状态(物体的运动状态是否改 谨约匚:h 换算?它表来的米般千米(时,匀速#行时千米出时詔(”米秒 :2m/s=2 X 3. 6kmM=h (过程单位同后)的时间对的谨度,或巷是相同賂 ■/ ?乙 程时的时间,再用公式计算 AT 图像,頁线汽匀速运动 卜t 图像,曰詢匀速运动, :①单位换算过程 ?0 40 19 ,乙九加速运动 (J )平均违度—皂路捏 吋阿(求棊段路程上朗平均逮度.必须扰出该诺毎及对应的时司). < ■ 1 I 4V
摘要 在工程技术领域,经常会遇到一些需要反复操作,重复性很高的工作,如果能有一个供反复操作且操作简单的专用工具,图形用户界面就是最好的选择。如在本设计中对于牛头刨床平面六杆机构来说,为了保证结构参数与运动参数不同的牛头刨床的运动特性,即刨刀在切削过程中接近于等速运动从而保证加工质量和延长刀具寿命,以及刀具的急回性能从而提高生产率,这样的问题如果能够通过设计一个模型平台,之后只需改变参量就可以解决预期的问题,这将大大的提高设计效率。本设计中正是通过建立牛头刨床六杆机构的数学模型,然后用MA TLAB程序设计出一个友好的人机交互的图形界面,并将数学模型参数化,使用户只需改变牛头刨床的参数就可以方便的实现运动分析和运动仿真,用户可以形象直观地观察到牛头刨床的运动轨迹、速度变化及加速度变化规律。 关键词:牛头刨床六杆机构MA TLAB 运动仿真程序开发
Abstract In the engineering area, often repeatedly encountered some operational needs, repetitive highly, and if the operation can be repeated for a simple operation and dedicated tool graphical user interface is the best choice. As in the planer graphic design for six pole bodies, and campaigns to ensure the structural parameters of different parameters planer movement characteristics, planning tool in the process of cutting close to equal campaign to ensure processing quality and extended life cutlery and cutlery rush back to the performance enhancing productivity, If such issues can be adopted to design a model platform parameter can be changed only after the expected settlement, which will greatly enhance the efficiency of the design. It is through the establishment of this design planer six pole bodies mathematical model, and then use MATLAB to devise procedures of a friendly aircraft in the world graphics interface, and mathematical models of the parameters, so that users only need to change the parameters planer can facilitate the realization of movement analysis and sports simulation, Users can visual image observed in planer movement trajectories, speed changes and acceleration changes. Keywords:Planer 6 pole bodies MATLAB Campaign simulation Procedure development.
第八章运动和力知识点总结含答案 一、选择题 1.中央电视台《是真的吗》某期节目中,有这样一个实验:将一根绳子穿过内壁和端口光滑的空心圆筒,绳子上端系一个金属球,下端与装有皮球的网袋连接。转动空心圆筒,使金属球转动(如图)。随着转速加大,网袋由静止开始向上运动。下列判断正确的是() A.金属球转动速度越大,惯性越大 B.金属球转动过程中,运动状态保持不变 C.网袋静止时,它对绳子的拉力和绳子对它的拉力是一对平衡力 D.网袋开始向上运动,说明所受到的拉力大于它的重力 2.如图摆球从A点静止释放,经过最低点B点,摆向另一侧的最高点C,在此过程中,下列说法中正确的是() A.小球到达B点的瞬间,若剪断悬线,小球将沿水平方向做匀速直线运动 B.小球到达B点的瞬间,若受到的力全部消失,小球将保持静止状态 C.小球到达C点的瞬间,若受到的力全部消失,小球将保持静止状态 D.小球到达C点的瞬间,若受到的力全部消失,小球将做匀速圆周运动 3.在一列匀速直线行驶的列车内,一位同学相对于车厢竖直向上跳起,可能会出现下列哪种情况() A.落在车厢内原来起跳点之前B.落在车厢内原来起跳点之后 C.落在车厢内原来起跳点D.不确定落点的位置 4.如图,轻质弹簧竖直放置,下端固定于地面,上端位于O点时弹簧恰好不发生形变.现将一小球放在弹簧上端,再用力向下把小球压至图中A位置后由静止释放,小球将竖直向上运动并脱离弹簧,不计空气阻力,则小球()
A.运动至最高点时,受平衡力作用 B.被释放瞬间,所受重力大于弹簧弹力 C.从A点向上运动过程中,速度先增大后减小 D.从O点向上运动过程中,重力势能转化为动能 5.如图所示,将轻质弹簧的一端固定在水平桌面上,在弹簧正上方O点释放一个重为G 的金属小球,下落到A点时与弹簧接触并压缩弹簧至最低点B点,随即被弹簧竖直弹出(整个过程弹簧在弹性范围内)。 A.小球在A点时速度最大 B.小球在B点时受平衡力 C.小球从A点到B位置先做加速运动再做减速运动 D.小球从A点到B位置做减速运动 6.在粗糙程度相同的水平面上,重为10N的物体在F=5N的水平拉力作用下,沿水平面由A点匀速运动到B点,此时撤去拉力,物体继续向前运动到C点停下来,此过程中下列说法正确的是( ) A.物体在AB段摩擦力等于10N B.物体在AB段摩擦力小于5N C.物体在BC段摩擦力等于5N D.物体在AB段摩擦力大于BC段摩擦力7.一个盛有盐水的容器中悬浮着一个鸡蛋,容器放在斜面上,如图所示,鸡蛋会受到来自水的各个方向的压力,如果画出这些力的合力,则这个合力的方向是图中的 A.F1 B.F2 C.F3
机械原理课程设计 六杆机构运动分析 学院:工程机械 专业:机械设计制造及其自动化 班级:25041004 设计者:王东升于新宇 2013年 1月8日一、分析题目
如图1所示六杆机构,对其进行运动和动力分析。已知数据如表1所示。 r1=r3=L2=110mm ,L4=600mm ,L AD=39mm ,n1=40r/min ,L CS4=220mm. 图1 六杆机构 二、分析内容 (1)进行机构的结构分析; 如2图所示,建立直角坐标系。机构中活动构件为1、2、3、4、5,即活动构件数n=5。A、C、B、D、E处运动副为低副(6个转动副,1个移动副),共7个,即P l=7。则机构的自由度为:F=3n-2P l=3Χ5-2Χ7=1。 图2(a)图2(b) 图2(c) 如图2,拆出基本杆组,(a)为原动件,(b)、(c)为二级杆组,该机构是由机架0、原动件1和2个Ⅱ级杆组组成,故该机构是Ⅱ级机构。 (2)绘制滑块E的运行线图;
利用JYCAE软件求解。 1、将题设所给的原始数据(机构的活动构件数、转动副数、移动副数、己知长度值总数 和机构的自由度)分别输入JYCAE软件中,如图3: 图3—1
图3—2 图3—3
图3—4 2、机构的运动分析 输入完所有的原始数据以后,开始运动分析。求E点的运动线图,要选取基本单元5,但是利用基本单元5的条件是已知C点的运动状态,所以先利用基本单元1、2求得C点的运动状态,然后求的E点运动线图。如图4。 图4—1 解得B点运动参数
图4—2 解得C点运动参数 图4—3 解得E点运动参数共选取3个基本单元,如图4—4,然后运算。
平面六杆机构运动分析 2111306008 王健 1、 曲柄摇杆串RRP 型II 级杆组平面六杆机构数学模型 如图1所示,当曲柄1做匀速转动时,滑块5做往复移动,该机构的行程速比系数大于1,有急回特性,且传动角较大。设曲柄1的角速度为ω,并在铰链C 建立坐标oxy 。由图可知,该机构由构件1、2、3、6组成的曲柄导杆机构和构件3、4、5、6组成的摆动滑块机构组成。机构中错误!未找到引用源。 (i=1,2,3,4)分别表示曲柄l 、机架2、导杆3、连杆4的长度及滑块5的行程用5s 表示。曲柄转动中心A 的坐标(y x H H ,)。 图1 六杆机构运动简图 对构件1、2、3、6组成的曲柄导杆机构进行运动分析。曲柄1转动角度 ?、连杆2转动角度 错误!未找到引用源。 及摇杆3转动角度错误!未找到引用源。都是以X 轴正方向为起始边的度量角度,单位为rad 。并设机构初始位置为曲柄1转角 0=?的位置。该机构的位置方程为: ?θδππi i i i x i y e L e L e L e H e H 1232/+=++ (1) 式(1)中x 、y 轴的分量等式为:
{ θ?δθ?δcos cos cos cos sin sin 213213L L L H L L L H x y +=+-+=+ (2) 当 错误!未找到引用源。 在 3600-作匀速变化时,就可以求出对应的连杆2的转角 错误!未找到引用源。 以及摇杆3的转角δ的值。将式消去 错误!未找到引用 源。 ,得到: ()()22213213cos cos sin sin L L H L L H L x y =--+-+?δ?δ (3) 将(3)式分解,并分别定义: ()212122231cos )sin (??L H L H L L A x y ++-+-= )sin (2131?L H L B y -= )cos (2131?L H L C x += 摇杆3的角位移 ()]/)tan[(2112121211C A C A B B a --+-+=δ (4) 由(2)式可得连杆 2 的角位移 ]/)sin sin arcsin[(213L L L H y ?δθ-+= (5) 假设曲柄作匀角速度dt d /φω=是常数,对式2求时间导数,得到连杆2的角速度2ω以及摇杆3角速度3ω,方程式如下: ( )()][sin cos sin cos sin cos 11233322?ω?ωωωδδθθL L L L L L =-- (6) 对式(6)求时间导数, 得到连杆 2 的角加速度及摇杆 3 的角加速度2a ,方程式 如下: ()()] [cos cos cos sin sin sin sin cos sin cos 3232221232322212233322δωθ?ωδωθ?ωδ δθθL L w L L L w L a a L L L L -+-----= (7) 再对构件3、4、5、6 组成的摆动滑块机构进行运动分析。首先建立机构位置方程,方程如下: 2/3543πφδi i i e S e L e L += (8) 式中5S 为滑块的行程。 按同样的方法可分别得到滑块 5 的位置、速度、加速度方程。连杆4和滑块5的位置方程为:
初中物理第八章运动和力知识点 【篇一:初中物理第八章运动和力知识点】 第八章运动和力第八章运动和力第一节牛顿第一定律第一节牛顿第一定律 1、伽利略斜面实验:(1)三次试验小车都从斜面顶端滑 下的目的是:保证小车开始沿着平面运动的速度相同。 (2)实验得出得结论:在同样条件下,平面越光滑,小车前进的越远。 (3)伽利略的推理:在理想情况下,如表面绝对光滑,物体将以 恒定不变的速度永远运动下去。 (4)伽利略斜面实验,在实验的基础上,进行了合理的推理,称作 理想化实验。 2、牛顿第一定律:(也叫惯性定律):一切物体在没有受到力的作 用的时,总保持静止状态或匀速直线运动状态。 说明:a、我们周围物体不受力是不可能的,因此不能用实验来直接 证明牛顿的第一定律。 b、物体在不受力的情况下:原来静止的物体,会保持静止;原来运 动的物体,不管原来做什么运动,都会做匀速直线运动。 c、揭示了力的本意,维持物体运动状态不变不需要力,改变物体 运动状态需要力。 3、惯性:指物体保持原来运动状态不变的性质。 一切物体在任何情况下都有惯性,惯性反映了物体保持原来状态的 本领,惯性大小只与物体的质量有关,与物体是否受力、受力大小、是否运动、运动速度等无关。 4、惯性是物体本身的一种属性,绝不能说成在惯性作用下或受到 惯性、克服惯性等。 5、防止惯性的现象:汽车安装安全气囊,汽车安装安全带;利用惯 性的现象;跳远助跑可提高成绩,拍打衣服可除灰尘。 解释现象:例:汽车突然刹车时,乘客为何向汽车行驶的方向倾倒?答:汽车刹车时,乘客与汽车一起处于运动状态,当刹车时,乘客 的脚由于受摩擦力作用,随汽车突然停止,而乘客的上身由于惯性 要保持原来的运动状态,继续向汽车行驶的方向运动。 第二节二力平衡第二节二力平衡 1、定义:物体在受到两个力的作 用时,如果能保持静止状态或匀速直线运动状态称二力平衡。
第三章运动和力复习提纲 一.机械运动 1.机械运动:物体空间位置发生了变化的运动。也是最简单、最基本的运动形式。 2.参照物:在研究机械运动时,被选作标准的物体叫做参照物。 参照物的选择是任意的(除研究对象本身外),科学中一般取地面或相对于地面静止的物体作为参照物,可以不加以说明;若选取其他合适的物体做参照物研究机械运动时,则要作出说明。3.运动和静止的相对性:运动和静止是相对参照物而言的。选择不同的参照物对同一物体运动的描述结果可能是不同的。 4.机械运动的分类: 根据运动路线的形状,可分为直线运动和曲线运动;而直线运动根据运动快慢是否变化,可分为匀速直线运动和变速直线运动。匀速直线运动是最简单的机械运动,即运动的方向和快慢不发生变化的运动。 5.比较物体的快慢有两种方法: ⑴相同时间比较路程,路程大的速度快;⑵相同的路程比较时间,用时少的速度快。 6.速度和平均速度 ⑴速度是表示物体运动快慢的科学量。 ①定义:物体在单位时间内通过的路程叫做速度。 ②计算公式:v=s/t ;变形公式:s=vt t=s/v ③速度单位:国际单位:米/秒,记作:m/s常用单位:千米/时,记作:Km/h 换算关系:1米/秒= 3.6千米/时“1米/秒”表示:物体在1秒内通过的路程为1米。 【注意】Ⅰ在速度计算中,路程、时间、速度三个量必须对应于同一个物体;运算中单位要统一,且要带单位计算。 Ⅱ在匀速直线运动中,任何时刻的速度是一定的,不能认为v与s成正比,与t成反比。 Ⅲ速度常识:人步行的速度为1.3 m/s,自行车的速度为4.2 m/s,高速公路上汽车的速度约为100 Km/h,动车组的速度约为200 Km/h,大型喷气式飞机的速度约为900 Km/h,空气中 声速为340 m/s,光和无线电波(电磁波)的速度3×108 m/s。 ⑵平均速度:当物体做变速直线运动时,由公式v=s/t算出来的速度称为平均速度。即平均速 度等于某段路程及通过这段路程的时间的比值。 二.力的存在 1.力的概念:力是物体对物体的作用。 2.力产生的条件:①必须有两个或两个以上的物体。②物体间必须有相互作用。
第6章 刚体的平面运动分析 6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0?= 0。试求动齿轮以圆心A 为基点的平面运动方程。 解:?cos )(r R x A += (1) ?sin )(r R y A += (2) α为常数,当t = 0时,0ω=0?= 0 2 2 1t α?= (3) 起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过 θ ? ?+=A 因动齿轮纯滚,故有? ? =CP CP 0,即 θ?r R = ?θr R = , ??r r R A += (4) 将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为: ??? ? ?? ???+=+=+=22 2212sin )(2cos )(t r r R t r R y t r R x A A A α?αα 6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。试以杆与铅垂线的夹角 表示杆的角速度。 解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。则角速度杆AB 为 h v AC v AP v AB θθω2000cos cos === 6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。试问当拖车以速度v 前进时,轮A 与垫滚B 的 角速度A ω与B ω有什么关系设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。 解: R v R v A A == ω R v R v B B 22== ω B A ωω2= 6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。试求该瞬时杆BC 的角速度和点C 的速度。 习题6-1图 A B C v h 习题6 P v A B C v h 习题6-2 习题6-3解图 习题6-3图 v A v B
初二物理第八章运动 和力
运动和力 第1节牛顿第一定律 【本节知识点】 1、牛顿第一定律:一切物体在没有受到外力作用的时候,总保持静止状态或匀速直线运动状态.(牛顿第一定律是在经验事实的基础上,通过进一步的推理而概括出来的,因而不能用实验来直接证明这一定律) 2、惯性:物体保持运动状态不变的性质叫惯性.牛顿第一定律也叫做惯性定律【基础达标训练】 1、(2013?黑河)正在水平面上滚动的小球,如果它受到的外力同时消失,那么它将() A、立即停下来 B、慢慢停下来 C、做匀速直线运动 D、改变运动方向 2、(2013?河北)第一位提出“物体的运动并不需要力来维持”的物理学家是() A、伽利略 B、奥斯特 C、帕斯卡 D、阿基米德 3、( 2013?鄂州)我国于2013年6月11日17︰38在酒泉发射中心成功发射“神州十号”飞船,并开创了中国载人应用型飞行的先河。火箭升空120秒后,逃逸塔与箭体分离,在分离的瞬间,下列关于逃逸塔的说法正确的是() A、失去重力 B、速度为零 C、仍有向上的速度 D、速度反向【能力提高训练】 4、(2013?龙岩)下列现象中,属于利用惯性的是() A、高速路上汽车限速行驶 B、汽车驾乘人员系安全带 C、人踩到香蕉皮上易滑倒 D、拍打衣服灰尘脱离衣服 5、(2013?陕西)下列说法中,防止惯性带来危害的是() A、通过拍打衣服,除去它上面的浮灰 B、投掷铅球时,球脱手后仍能继续向前运动 C、迅速向下撞击斧子木柄的把手端,斧头就能套紧在木柄上 D、行驶中的车辆之间保持一定距离 6、(2013?东营)如图1所示,水平公路上向前行驶的汽车中,有一竖直站立的人突然向前倾。以下说法正确的是() A、人向前倾说明人不具有惯性 B、人向前倾说明车具有惯性 C、车突然加速 D、车突然减速
其中 ) ) 4 ) ) b 图 a 图 七年级科学(下)第三章《运动和力》测试题 、选择题 D. B. C. 实心球在空中上升 实心球从空中下落 实心球在地上越滚越慢 实心球停在地面上 A .船和山 B .山和船 C .地面和山 D .河岸和流水 3?如图是投掷实心球的场景。下列情况中实心球受到平衡力作用的是( A . 5?如图,分别用大小相等的力拉和压同一弹簧。该实验表明, 弹 簧受力产生的效果与力的( ) A .大小有关 B .作用点有关 C.方向有关 D ?大小、方向、作用点都有关 6 ?如图所示,使一薄钢条下端固定,现分别用不同的力去推它,使其发生甲、乙、丙、丁各图所示的形 变。 如果F l =F 3 = F 4>F 2,那么说明力的作用效果跟力的作用点有关的图是 ( ) A .图甲和图乙 '. . ...' 6牛拉力。并使其保持静止,此时弹簧 10?如图所示,某同学实验时在弹簧涮力计的两侧沿水平方向各加 测 力计的示数为( ) A . 0 牛 B . 3 牛 C . 6 牛 D . 12 牛 1. 2001年9月11日,恐怖分子利用劫持一架质量为 104吨,约载35吨燃油的波音757飞机,水平撞击世 贸大楼的北部塔楼爆炸,使世贸大楼受重创的巨大能量是( ) A .飞机的重力势能 B .飞机的动能 C .飞机的热能 D .燃油燃烧产生的热能 2.敦煌曲子词中有这样的词句: 满眼风波多闪灼,看山恰似走来迎,仔细看山山不动,是船行。 看山恰似走来迎"和 是船行"所选的参照物分别是( ) F 列哪幅图中的箭头能正确表示球受到的重力的方向( B .图甲和图丙 C .图甲和图丁 B .撑杆跳高的运动员此时受到重力、杆的作用力和一个向上的推力 C .脱离运动员手后的铅球是在推力下向前运动的,说明运动的物体 一定受到了推力 D . b 图杆被撑杆跳高的运动员压弯了说明力能使物体发生形变 &使用弹簧秤前,应先调节指针指在零刻度线上,再观察其量程。若指针指在零刻度线上方而没有及时 调节就 开始测重力,则所测得的重力大小与真实值相比将是( ) A .偏小 B .偏大 C .相同 D .不能确定 9. F 1和F 2的大小如图所示,在比较 F 1和F 2的大小时,下列说法中正确的是( A . F 1 机械原理大作业(一)平面六杆机构的运动分析 班级: 学号: 姓名: 同组者: 完成时间: 一.题目 1.1 说明 如图所示为一片面六杆机构各构件尺寸如表格1所示,又知原动件1以等角速度ω=1rad/s沿逆时针方向回转,试求各从动件的角位移、角加速度以及E点的位移、速度及加速度的变化情况。1.2 数据 组号L1L2L’2L3L4L5L6 x G y G 1-A 26.5 105.6 65.0 67.5 87.5 34.4 25.0 600 153.5 41.7 表格1 条件数据 1.3 要求 三人一组,编程计算出原动件从0~360o时(计算点数N=36)所要求各运动变量的大小,并绘制运动线图及点的轨迹曲线。 二.解题步骤 由封闭图形ABCD可得: 由封闭图形AGFECD可得 于是有: 112233 1122433 sin sin sin1 cos cos sin2 l l l l l l l θθθ θθθ +=-------- +=+----- / 1122225566 / 1122225566 cos cos sin cos cos153.53 sin sin cos sin sin41.74 l l l l l l l l l l θθθθθ θθθθθ +++=+---- +-+=+----- 对以上1到4导可得- 222333111 222333111 / 55566611122222 / 55566611122222 cos cos cos sin sin sin sin sin sin(sin cos) cos cos cos(cos sin) l l l l l l l l l l l l l l l l θωθωθω θωθωθω θωθωθωωθθ θωθωθωωθθ-+= -=- -=--- -=--+ 物理第八章运动和力知识点-+典型题及答案 一、选择题 1.如图所示,用细线将小球悬挂在无人机上,图甲中无人机带着小球竖直向上运动;图乙中无人机带着小球水平向右运动;两图中,小球与无人机均保持相对静止,不计空气阻力。下列说法中正确的是() A.甲图中,小球可能做加速直线运动 B.甲图中,若悬挂小球的细线突然断了,小球立刻向下运动 C.乙图中,小球可能做匀速直线运动 D.乙图中,小球受到的重力和细绳对小球的拉力是一对平衡力 2.小明发现蹦极运动中只受到两个力的作用(不计空气阻力),重力大小不变,而弹性绳的弹力是变化的。蹦极运动的过程是利用弹性绳捆住人的脚,从高处p跳下,人到a处时刚好拉直弹性绳,人继续向下运动到最低点c后又返回向上运动,如此反复,最终停在b 位置。在开始下降时,经过pa段、ab段、bc段的过程中,人的运动情况分析错误的是() A.pa段加速运动 B.ab段加速运动 C.bc段减速运动 D.a点速度最大 3.如图所示,是南开中学教师运动会的“同心鼓”项目,这个项目要求老师们同时用力拉着鼓四周的绳子,通过有节奏的收、放绳子使鼓起伏,让球在鼓面上跳动。下列说法正确的是() A.球在上升过程中所受合力不为零,合力方向竖直向下 B.球上升到最高点,此时速度为零,受平衡力 C.球与鼓面撞击后向上运动,是因为球受到惯性 D.鼓悬空保持静止时,因受到多个不同方向的拉力,合力不为零 4.如图所示, “舞狮”是我国传统年俗活动,此时狮子静止在支架上,关于该活动说法正确的是 A.狮子对支架的压力和和狮子受到的重力是一对相互作用力 B.狮子受到的重力和支架受到狮子的压力是一对平衡力 C.当狮子向上跃起时,狮子受到的是非平衡力 D.狮子向上跃起后到达最高点的瞬间,受到的是平衡力 5.下列体育项目中的一些现象,不能用“力的作用是相互的”来解释的是 A.跳水运动员踩踏跳板,身体向上跳起 B.滑冰运动员用力推墙,身体离墙而去 C.铅球运动员投出铅球后,铅球在空中会下落 D.游泳运动员向后划水,身体前进 6.如图所示,重力为G的木块被沿竖直方向的两根绳子拉住处于静止状态,已知木块受绳子向上拉力为F1,向下拉力为F2,当上面绳子被剪断后,不计空气阻力,木块下落过程中所受合力大小和方向为 A.F1-G 竖直向上 B.F2+G竖直向下 C.F1-F2竖直向下 D.F1+F2竖直向上 7.一杯水放在列车内的水平桌面上,如果水面突然发生了如图所示的变化,则列车的运动状态可能发生的变化是() A.列车突然向右启动或向左运动时突然刹车 B.列车突然向左启动或向右运动时突然刹车 C.列车突然加速 一、填空题: 1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有6个速度瞬心,其中3个是绝对瞬心。 8.速度比例尺μν表示图上每单位长度所代表的速度大小,单位为:(m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为(m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 P直接标注在图上)。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij 12 三、 在图a 所示的四杆机构中,l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度 a ) 24) 14(P 13) P 24 P 23→∞ 2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。 9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( ) 第八章运动和力知识点及练习题及答案 一、选择题 1.一只木箱,静止放在水平地面上,下列说法中正确的是() A.木箱所受的重力和木箱对地面的压力为一对平衡力 B.木箱所受的重力和地面对木箱的支持力为一对平衡力 C.木箱对地面的压力和地面对木箱的支持力为一对平衡力 D.木箱所受的重力和木箱对地球的吸引力为一对平衡力 2.现有3块相同的砖,每块砖重为10N,一人用竖直的两板将三块砖如图所示夹起,则“2号”砖左侧和右侧各自所受摩擦力大小分别为() A.5N 5N B.5N 10N C.10N 5N D.10N 10N 3.如图所示,放在水平地面上的两个物体一起匀速直线运动,下列对这两个物体受力分析正确的是() A.A对B的压力与B受到地面的支持力是一对平衡力 B.A对B的压力与B对A的支持力是一对平衡力 C.B对A的支持力与A的重力是一对相互作用力 D.A对地球的吸引力与地球对A的吸引力大小相等 4.随着经济的快速发展和物质生活水平的提高,人们的精神文化需求日益增长,轮滑运动慢慢成为广大青年群众积极参与的社会活动,在轮滑运动中,下列说法正确的是()A.轮滑受到的重力和水平地面对轮滑的支持力是一对平衡力 B.轮滑下面的轮子是通过变滑动为滚动的方式减小摩擦的 C.轮滑匀速转弯时,受到平衡力的作用 D.轮滑运动时不用力仍能保持向前滑行是由于受到惯性的作用 5.随着生活水平的提高,扫地机器人逐步进入普通家庭。如图是某扫地机器人在水平地面上匀速前行的情景。下列属于平衡力的是() A.地面对机器人的摩擦力和机器人的重力 B.地面对机器人的支持力和机器人的重力 C.机器人对地面的压力和机器人的重力 D.地面对机器人的摩擦力和机器人对地面的压力 6.第24届冬奥会将于2022年在北京—张家口举办.如图所示,当运动员穿着滑雪板在水平雪地上进行滑行训练时,下列说法中正确的是() A.以滑雪板为参照物,运动员是运动的 B.穿滑雪板是为了减小对雪地的压力 C.雪地对滑雪板的支持力和滑雪板对雪地的压力是相互作用力 D.滑雪板受到的重力和雪地对滑雪板的支持力是一对平衡力 7.体检时,小宏静立在体重秤上,下列几对力中属于彼此平衡的是 A.小宏对秤的压力与秤受到的支持力 B.小宏对秤的压力与秤对他的支持力 C.秤受到的重力与秤对小宏的支持力 D.小宏受到的重力与秤对他的支持力 8.电视机放在水平桌面上静止,下列各对力中属于平衡力的是() A.桌面对电视机的支持力与电视机对桌面的压力 B.桌子受到的重力与电视机受到的重力 C.电视机受到的重力与桌面对电视机的支持力 D.电视机对桌面的压力与地面对桌子的支持力 9.用弹簧测力计拉着重8N的物体在水平面上以2.5m/s的速度做匀速直线运动,弹簧测力计的示数为2N.当绳子突然断开时,则:() A.物体速度保持不变,受到的摩擦力等于2N B.物体速度逐渐减小,受到的摩擦力等于2N C.物体速度逐渐不变,受到的摩擦力等于8N D.物体立即停止,受到的摩擦力为零 F 作用,在水平地面上做匀速10.如图所示,重200N的小车受到水平向右的拉力15N 机械原理 课程设计说明书 题目六杆机构运动分析 学院工程机械学院 专业机械设计制造及其自动化 班级机制三班 设计者秦湖 指导老师陈世斌 2014年1月15日 目录 一、题目说明??????????????????????????????????????????????????? 2 1、题目要求????????????????????????????????????????????? 3 2、原理图????????????????????????????????????????????? 3 3、原始数据????????????????????????????????????????????? 3 二、结构分析??????????????????????????????????????????????????? 4 三、运动分析????????????????????????????????????????????????? 5 1、D点运动分析?????????????????????????????????? 8 2、构件3运动分析??????????????????????????????????9 3、构件4运动分析??????????????????????????????????9 4、点S4运动分析??????????????????????????????????10 四、结论?????????????????????????????????????????????????????10 五、心得体会?????????????????????????????????????????????????????10 六、参考文献?????????????????????????????????????????????????????11 第八章运动和力知识点总结及解析 一、选择题 1.一只木箱,静止放在水平地面上,下列说法中正确的是() A.木箱所受的重力和木箱对地面的压力为一对平衡力 B.木箱所受的重力和地面对木箱的支持力为一对平衡力 C.木箱对地面的压力和地面对木箱的支持力为一对平衡力 D.木箱所受的重力和木箱对地球的吸引力为一对平衡力 2.如图所示,一轻弹簧上端固定在天花板上,下端连接一小球。开始时小球静止在O 点,将小球向下拉到B点,释放小球,已知AO=OB,研究小球在竖直方向上的受力和运动情况,则() A.小球运动到O点时将停止运动并保持静止 B.小球运动到A点时将停止运动并保持静止 C.小球从B运动到O的过程中弹力大于重力、速度不断增大 D.小球从O运动到A的过程中弹力大于重力、速度不断减小 3.茶杯放在水平桌面上处于静止状态,下列说法正确的是() A.桌面受到杯子的压力就是杯子的重力 B.杯子受到的重力和桌面对杯子的支持力是一对平衡力 C.桌子受到的重力与地面对桌子的支持力是一对平衡力 D.杯子受到的重力和桌面对杯子的支持力是一对相互作用力 4.在粗糙程度相同的水平面上,重为10N的物体在F=5N的水平拉力作用下,沿水平面由A点匀速运动到B点,此时撤去拉力,物体继续向前运动到C点停下来,此过程中下列说法正确的是( ) A.物体在AB段摩擦力等于10N B.物体在AB段摩擦力小于5N C.物体在BC段摩擦力等于5N D.物体在AB段摩擦力大于BC段摩擦力5.把一个重为G的物体竖直向上抛出,如果物体在空中运动时所受的空气阻力大小恒定为f,则该物体在上升过程与下降过程中所受重力和阻力的合力分别为F上、F下,则()A.F上 = G B.F上>G C.F下 = G D.F下>G 6.值日时,小东提着一桶水走进教室.下列情况中,属于彼此平衡的两个力的是: () A.水桶对人的拉力和人对水桶的拉力 B.水桶受到的重力和水桶对人的拉力 C.水桶受到的重力和人对水桶的拉力 D.水桶受到的重力和水桶对地球的引力 第3章《运动和力》1-5节 姓名: 3.1 机械运动 1、机械运动:一个物体相对于另一个物体位置的变化。 2、参照物:为研究物体的运动假定不动的物体(不能选择所研究的对象本身作为参照物) 如果选择的参照物不同,描述结果可能是不同的。所以运动和静止是_相对_的 例1:小船在河里顺流漂下,船上坐着一个人,河岸上有树,如果以人作为参照物,那么小船是 , 河水是 ,树是 ,河岸是 的 例2在新型飞机的研制中,将飞机模型放在风洞中固定不动,让风(高速流动的空气)迎面吹来,可以模拟飞机在空中的飞行情况,在此情境中下列说法正确的是( ) A .飞机模型相对于地面是运动的 B .飞机模型相对于空气是运动的 C .空气相对于地面是静止的 D .空气相对于飞机模型是静止的 3、机械运动的分类:按运动路线分:直线运动和曲线运动 按运动快慢是否变化分:匀速直线运动和变速直线运动 4、比较物体运动快慢的两种方法: ① 比较相同时间内通过的路程;② 比较通过相同路程所用的时间。 5、速度:物体在单位时间内通过的路程,速度是描述物体 运动快慢 的物理量 速度(v )=)时间()路程(t s 变形公式:① s =v t 、② t =v s 某物体速度是10米/秒,它表示物体在1秒钟内通过的路程是10米。 单位换算关系:1米/秒(m /s )=3.6千米/时(km /h ) 例:某车沿平直的公路匀速行驶,1分钟通过了600米的路程,求该车的速度为多少米每秒?合多少千米每时? (写出计算过程) 3.2 力的存在 1.力是物体对物体的作用,产生力的条件是(1)两个物体(2)相互作用(但不一定接触,如重力) 2.力的作用效果:力可以改变物体的形状(发生形变);力可以改变物体的运动状态。 物体的运动状态是否改变指:物体速度大小和运动方向是否改变。平面六杆机构的运动分析
物理第八章 运动和力知识点-+典型题及答案
第3章 平面机构的运动分析答案
平面机构的运动分析习题和答案
第八章 运动和力知识点及练习题及答案
机械原理课程设计六杆机构运动分析
第八章 运动和力知识点总结及解析
第3章《运动和力》1-5节
相关主题
文本预览