
工业机器人核心部件-谐波减速器
作者:csuzhm2009-03-24 00:18 星期二晴
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构;
2)谐波减速机械;
3)摆线针轮减速机构;
4)行星齿轮减速机械;
5)无侧隙减速机构;
6)蜗轮减速机构;
7)滚珠丝杠机构;
8)金属带/齿形减速机构;
9)球减速机构。
其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改):
谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。
(一)传动原理
它主要由三个基本构件组成:
(1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮;
(2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮;
(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由
啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。
谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即z2-z1=n
式中z2、z2--分别为刚轮与柔轮的齿数。
当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为
i=-z1/(z2-z1)
双波传动中,z2-z1=2,柔轮齿数很多。上式负号表示柔轮的转向与波发生器的转向相反。由此可看出,谐波减速器可获得很大的传动比。
(二)特点
1.承载能力高谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数(重叠系数)比较多,因而单位面积载荷小,承载能力较其他传动形式高。
2.传动比大单级谐波齿轮传动的传动比,可达i=70~500。
3.体积小、重量轻。
4.传动效率高、寿命长。
5.传动平稳、无冲击,无噪音,运动精度高。
6.由于柔轮承受较大的交变载荷,因而对柔轮材料的抗疲劳强度、加工和热处理要求较高,工艺复杂。
谐波减速器在国内于六七十年代才开始研制,到目前已有不少厂家专门生产,并形成系列化。广泛应用于电子、航天航空、机器人等行业,由于它的独特优点,在化工行业的应用也逐渐增多。
当波发生器为主动时,凸轮在柔轮内转动,就近使柔轮及薄壁轴承发生变形(可控的弹性变形),这时柔轮的齿就在变形的过程中进入(啮合)或退出(啮离)刚轮的齿间,在波发生器的长轴处处于完全啮合,而短轴方向的齿就处在完全的脱开。
波发生器通常成椭圆形的凸轮,将凸轮装入薄壁轴承内,再将它们装入柔轮内。此时柔轮由原来的圆形而变成椭圆形,椭圆长轴两端的柔轮与之配合的刚轮齿则处于完全啮合状态,即柔轮的外齿与刚轮的内齿沿齿高啮合。这是啮合区,一般有30%左右的齿处在啮合状态;椭圆短轴两端的柔轮齿与刚轮齿处于完全脱开状态,简称脱开;在波发生器长轴和短轴之间的柔轮齿,沿柔轮周长的不同区段内,有的逐渐退出刚轮齿间,处在半脱开状态,称之为啮出。
波发生器在柔轮内转动时,迫使柔轮产生连续的弹性变形,此时波发生器的连续转动,就使柔轮齿的啮入—啮合—啮出—脱开这四种状态循环往复不断地改变各
自原来的啮合状态。这种现象称之错齿运动,正是这一错齿运动,作为减速器就可将输入的高速转动变为输出的低速转动。
对于双波发生器的谐波齿轮传动,当波发生器顺时针转动1/8周时,柔轮齿与刚轮齿就由原来的啮入状态而成啮合状态,而原来脱开状态就成为啮入状态。同样道理,啮出变为脱开,啮合变为啮出,这样柔轮相对刚轮转动(角位移)了1/4齿;同理,波发生器再转动1/8周时,重复上述过程,这时柔轮位移一个齿距。依此类推,波发生器相对刚轮转动一周时,柔轮相对刚轮的位移为两个齿距。
柔轮齿和刚轮齿在节圆处啮合过程就如同两个纯滚动(无滑动)的圆环一样,两者在任何瞬间,在节圆上转过的弧长必须相等。由于柔轮比刚轮在节圆周长上少了两个齿距,所以柔轮在啮合过程中,就必须相对刚轮转过两个齿距的角位移,这个角位移正是减速器输出轴的转动,从而实现了减速的目的。
波发生器的连续转动,迫使柔轮上的一点不断的改变位置,这时在柔轮的节圆的任一点,随着波发生器角位移的过程,形成一个上下左右相对称的和谐波,故称之为:“谐波”。
(1) 结构型式
谐波传动减速器包括三个基本构件:波发生器、柔轮、刚轮(如图1所示)。三个构件中可任意固定一个,其余两个一为主动,一为从动,可实现减速或增速(固定传动比),也可变成两个输入,一个输出,组成差动传动。
图1
(2) 工作原理
谐波传动减速器的工作原理如图2a、b、c、d所示,当刚轮固定,波发生器为主动,柔轮为从动时,柔轮在椭圆形的波发生器作用下产生变形,在波发生器长轴两端处的柔轮轮齿与刚轮轮齿完全啮合;在波发生器短轴两端处,柔轮轮齿与刚轮轮齿完全脱开;在椭圆长轴两侧,柔轮轮齿与刚轮轮齿处于不完全啮合状态。在波发生器长轴旋转的正方向一侧,称为啮入区;在长轴旋转的反方向一侧,称为啮出区。由于波发生器的连续转动,使得啮入、完全啮合、啮出、完全脱开这四种情况依次变化,循环不已。由于柔轮比刚轮的齿数少2个,所以当波发生器转动一周时,柔轮向相反方向转过两个齿的角度,从而实现了大的减速比。
图2
安徽理工大学继续教育学院 毕业设计 题目二级直齿圆柱齿轮减速器 系别 专业机械电子工程 班级 09 姓名汪凡凯 学号 指导教师 日期 2011年5月
摘要 齿轮传动是现代机械中应用最广的一种传动形式。它由齿轮、轴、轴承及箱体组成的齿轮减速器,用于原动机和工作机或执行机构之间,起匹配转速和传递转矩的作用。齿轮减速器的特点是效率高、寿命长、维护简便,因而应用极为广泛。 本设计讲述了带式运输机的传动装置——二级圆柱齿轮减速器的设计过程。首先进行了传动方案的评述,选择齿轮减速器作为传动装置,然后进行减速器的设计计算(包括选择电动机、设计齿轮传动、轴的结构设计、选择并验算滚动轴承、选择并验算联轴器、校核平键联接、选择齿轮传动和轴承的润滑方式九部分内容)。运用AutoCAD软件进行齿轮减速器的二维平面设计,完成齿轮减速器的二维平面零件图和装配图的绘制。 关键词:齿轮啮合轴传动传动比传动效率
目录 1、引言 (1) 2、电动机的选择 (2) 2.1. 电动机类型的选择 (2) 2.2.电动机功率的选择 (2) 2.3.确定电动机的转速 (2) 3、计算总传动比及分配各级的传动比 (4) 3.1. 总传动比 (4) 3.2.分配各级传动比 (4) 4、计算传动装置的传动和动力参数 (5) 4.1.电动机轴的计算 (5) 4.2.Ⅰ轴的计算(减速器高速轴) (5) 4.3.Ⅱ轴的计算(减速器中间轴) (5) 4.4.Ⅲ轴的计算(减速器低速轴) (6) 4.5.Ⅳ轴的计算(卷筒轴) (6) 5、传动零件V带的设计计算 (7) 5.1.确定计算功率 (7) 5.2.选择V带的型号 (7) 5.3.确定带轮的基准直径d d1 d d2 (7) 5.4.验算V带的速度 (7) 5.5.确定V带的基准长度L d 和实际中心距a (7) 5.6.校验小带轮包角ɑ 1 (8)
P r e c i s i o n G e a r i n g&M o t i o n C o n t r o l
{ { { The Basic Component Set 1) T he Wave generator (WG) is a thin raced bearings assembly ? tted onto an elliptical plug, and normally is the rotating input member.2) T he Flexspline (FS) is a non-rigid ring with external teeth on a slightly smaller pitch diameter than the Circular Spline. It is ? tted over and is elastically de? ected by the Wave Generator.3) T he Circular Spline (CS) is a rigid ring with internal teeth, engaging the teeth of the Flexspline across the major axis of the Wave Generator.4) T he Dynamic Spline (DS) is a rigid ring having internal teeth of same number as the Flexspline. It rotates together with the Flexspline and serves as the output member. It is identi? ed by chamfered corners at its outside diameter. Contents Compact, High Ratio, In-Line Gearing .............................2The Basic Component Set ................................................2Con? guration .....................................................................3Typical Installation .............................................................3Ordering Information .........................................................3Dimensions ........................................................................4Performance Ratings ........................................................5Lubrication .........................................................................6Installation .........................................................................6Ef? ciency ...........................................................................7No-Load Running Torque, Starting Torque,and Back Driving Torque (7) Compact, High Ratio, In-Line Gearing Harmonic Drive HDUF “Pancake” type component set offers the designer high ratio, in-line mechanical power transmissions in extremely compact con? gurations. The component set consists of four elements: the Wave generator, an elliptical bearing assembly; the Flexspline, a non-rigid ring with external teeth; and the Circular Spline and the Dynamic Spline, rigid internal gears. Rotation of the Wave Generator imparts a rotating elliptical shape to the Flexspline causing progressive engagement of its external teeth with the internal teeth of the Circular Spline and the Dynamic Spline. The ? xed Circular Spline has two more teeth than the Flexspline, thereby imparting relative rotation to the Flexspline at a reduction ratio corresponding to the difference in the number of teeth. With the same number of teeth, the Dynamic Spline rotates with and at the same speed as the Flexspline.
工业机器人核心技术全解析 无论是德国率先提出的“工业4.0”概念,美国推行的“先进制造伙伴关系(AMP)”计划,还是日本正在实施的“智慧制造系统(IMS)”和中国工信部通过的“中国制造2025规划”,这些都指向同一个目标,那就是希望通过先进的IT与自动化技术来促进制造业的革新,以实现“智能化”,提升效率,降低成本。而要实现这个目标工业机器人是不可或缺的一环。 以前,工业机器人应用最为广泛的是汽车制造业;现在,工业机器人制造企业正努力向其他领域拓展。工业机器人制造企业也如雨后春笋般不断涌现,据统计仅去年中国国内差不多增加了200多加工业机器人制造厂商。对于工业机器人的市场前景,业界都是一致看好,普遍认为未来5~10年将会迎来工业机器人的一个爆发期。不过,要想在这一波浪潮中得益的话也并不容易。因为工业机器人涉及的系统相当复杂,仅核心零部件就包括了机械系统、控制器、伺服器和减速器等等。本刊就工业机器人的关键技术问题采访了一些半导体厂商,详细介绍了工业机器人当中的一些电子核心零部件。 控制器平台之争 在Altera公司亚太区工业业务部市场开发首席经理江允贵看来,有三个趋势在推动着工业自动化市场的蓬勃发展。一是,提升能源效率,降低能源成本;二是提升生产效率,这包括功能安全、生产线的稳定安全、保护操作人员的安全、以及机器损坏的降低和更长的生命周期和可靠度;三是所谓的智能工厂。而只有前面两个因素达到后,才有可能实现智能工厂。他认为工业机器人是自动化里的很关键一部分。 江允贵拿智能工厂举例,他说现在一个典型的的智能工厂,从企业到工厂,以及工厂内如都是以工业以太网相连接的,他认为用工业以太网取代传统的以太网,主要是因为工业以太网的实时性更好。工业以太网可以连接主站和从站,连接主站中的PLC、PAC/运动控制器和HMI,和从站中的伺服器、I/O模块等等。
兰州工业学院学院 毕业设计 题目二级直齿圆柱齿轮减速器系别机电工程学院 专业机械设计与制造 班级机设 姓名***** 学号****** 指导教师**** 日期2013年12月
设计任务书 题目: 带式运输机传动系统中的二级直齿圆柱齿轮减速器设计要求: 1:运输带的有效拉力为F=2500N。 2:运输带的工作速度为V=1.7m/s。 3:卷筒直径为D=300mm。 5:两班制连续单向运转(每班8小时计算),载荷变化不大,室内有粉尘。6:工作年限十年(每年300天计算),小批量生产。 设计进度要求: 第一周拟定分析传动装置的设计方案: 第二周选择电动机,计算传动装置的运动和动力参数: 第三周进行传动件的设计计算,校核轴,轴承,联轴器,键等: 第四周绘制减速器的装配图: 第五周准备答辩 指导教师(签名):
摘要 齿轮传动是现代机械中应用最广的一种传动形式。它由齿轮、轴、轴承及箱体组成的齿轮减速器,用于原动机和工作机或执行机构之间,起匹配转速和传递转矩的作用。齿轮减速器的特点是效率高、寿命长、维护简便,因而应用极为广泛。 本设计讲述了带式运输机的传动装置——二级圆柱齿轮减速器的设计过程。首先进行了传动方案的评述,选择齿轮减速器作为传动装置,然后进行减速器的设计计算(包括选择电动机、设计齿轮传动、轴的结构设计、选择并验算滚动轴承、选择并验算联轴器、校核平键联接、选择齿轮传动和轴承的润滑方式九部分内容)。运用AutoCAD软件进行齿轮减速器的二维平面设计,完成齿轮减速器的二维平面零件图和装配图的绘制。 关键词:齿轮啮合轴传动传动比传动效率
目录 1、引言 (1) 2、电动机的选择 (2) 2.1. 电动机类型的选择 (2) 2.2.电动机功率的选择 (2) 2.3.确定电动机的转速 (2) 3、计算总传动比及分配各级的传动比 (4) 3.1. 总传动比 (4) 3.2.分配各级传动比 (4) 4、计算传动装置的传动和动力参数 (5) 4.1.电动机轴的计算 (5) 4.2.Ⅰ轴的计算(减速器高速轴) (5) 4.3.Ⅱ轴的计算(减速器中间轴) (5) 4.4.Ⅲ轴的计算(减速器低速轴) (6) 4.5.Ⅳ轴的计算(卷筒轴) (6) 5、传动零件V带的设计计算 (7) 5.1.确定计算功率 (7) 5.2.选择V带的型号 (7) 5.3.确定带轮的基准直径d d1 d d2 (7) 5.4.验算V带的速度 (7) 5.5.确定V带的基准长度L d 和实际中心距a (7) 5.6.校验小带轮包角ɑ 1 (8)
认识机器人 机器人的发展史: 认识机器人首先先了解下robot机器人这一词是怎么来的。1920年捷克作家卡雷尔·卡佩克发表了科幻剧本《罗萨姆的万能机器人》。在剧本中,卡佩克把捷克语“Robota”写成了“Robot”,“Robota”是奴隶的意思。该剧预告了机器人的发展对人类社会的悲剧性影响,引起了大家的广泛关注,被当成了机器人一词的起源。从此,“robot”以及相对应的中文“机器人”一词开始在全世界流行。 上个世纪60年代前后,随着微电子学和计算机技术的迅速发展,自动化技术也取得了飞跃性的变化,开始出现了现在普遍意义上的机器人。1959年,美国英格伯格和德沃尔制造出世界上第一台工业机器人,取名“尤尼梅逊”,意为“万能自动”。尤尼梅逊的样子像一个坦克炮塔,炮塔上伸出一条大机械臂,大机械臂上又接着一条小机械臂,小机械臂再安装着一个操作器。这三部分都可以相对转动、伸缩,很像是人的手臂了。它的发明人专门研究了运动机构与控制信号的关系,编制出程序让机器记住并模仿、重复进行某种动作。英格伯格和德沃尔认为汽车制造过程比较固定,适合用这样的机器人。于是,这台世界上第一个真正意义上的机器人,就应用在了汽车制造生产中。 经过近百年来的发展,机器人已经在很多领域中取得了巨大的应用成绩,其种类也不胜枚举,几乎各个高精尖端的技术领域更是少不了它们的身影。在这期间,机器人的成长经历了三个阶段。第一个阶段中,机器人只能根据事先编好的程序来工作,这时它好像只有干活
儿的手,不懂得如何处理外界的信息。打个比方,如果让这样的机器人去抓会损坏它的东西,它也一定会去做。第二个阶段中,机器人好像有了感觉神经,具有了触觉、视觉、听觉、力觉等功能,这使得它可以根据外界的不同信息做出相应的反馈。如果再让它去抓某些东西,它可能就不干啦。第三个阶段,机器就真正长大成人啦,这时它不仅具有多种技能,能够感知外面的世界,而且它还能够不断自我学习,用自己的思维来决策该做什么和怎样去做。第一阶段的机器人,是小孩子,人们称它为“示教再现型”;第二阶段的机器人是一个青年,人们称它为“感觉型”;第三阶段的机器人则是成年人,称为“智能型”。1968年,美国斯坦福研究所研制出世界上第一台智能型机器人。这个机器人可以在一次性接受由计算机输出的无线遥控指令后,自己找到目标物体并实施对该物体的某些动作。1969年,该研究所对机器人的智能进行测定。他们在房间中央放置了一个高台,在台上放一只箱子,同时在房间一个角落里放了一个斜面体。科学家命令机器人爬上高台并将箱子推到地下去。开始,这个机器人绕着台子转了20分钟,却无法登上去。后来,它发现了角落里的斜面体,于是它走过去,把斜面体推到平台前并沿着这个斜面体爬上了高台将箱子推了下去。这个测试表明,机器人已经具备了一定的发现、综合判断,决策等智能。 到了上个世纪70年代,第二代机器人开始迅速发展并进入实用和普及的阶段,而第三代机器人在今天也已经得到了突飞猛进的变化。它能够独立判断和行动,具有记忆、推理和决策的能力,在自身
随着现代科技的飞速发展,机器人已不只是存在于影视作品中,人们逐渐可以发现,在我们的社会生活中越来越多地方都开始使用服务型机器人,甚至很多人家里也有诸如扫地机器人之类的产品。除此以外,还有一类使用频率较高的工业机器人。但是,不论是服务型机器人还是工业机器人,都会使用到精密减速器,但很少有人了解这一仪器具体有何作用,下面就给大家介绍一下。 工业机器人的动力源一般为交流伺服电机,因为由脉冲信号驱动,其伺服电机本身就可以实现调速,为什么工业机器人还需要减速器呢?工业机器人通常执行重复的动作,以完成相同的工序;为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,对工业机器人的定位精度和重复定位精度要求很高。因此,提高和确保工业机器人的精度就需要采用RV减速器或谐波减速器。精密减速器在工业机器人中的另一作用是传递更大的扭矩。当负载较大时,一味提高伺服电机的功率是很不划算的,可以在适宜的速度范围内通过减速器来提高输出扭矩。此外,伺服电机在低频运转下容易发热和出现低频振动,对于长时间和周期性工作的工业机器人这都不利于确保其精确、可靠地运行。 精密减速器的存在使伺服电机在一个合适的速度下运转,并精确地将转速降
到工业机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。与通用减速器相比,机器人关节减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。 相比于谐波减速器,RV减速器具有更高的刚度和回转精度。因此在关节型机器人中,一般将RV减速器放置在机座、大臂、肩部等重负载的位置;而将谐波减速器放置在小臂、腕部或手部;行星减速器一般用在直角坐标机器人上。 以上就是由四川志方科技有限公司为大家提供的关于精密减速器在工业机器人上的作用信息,如果你对此感兴趣,或者想要了解更多相关信息,建议咨询专业机构。
工业机器人常见五大应用领域及关键技术 去年全球工业机器人销量达到24万台,同比增长8%。其中,我国工业机器人市场销量超过6.6万台,继续保持全球第一大工业机器人市场的地位。但是,按机器人密度来看,即每万名员工对应的机器人保有量,我国不足30台,远低于全球约为50多台的平均水平。 前瞻产业研究院《2016-2021年中国工业机器人行业产销需求预测与转型升级分析报告》数据显示:2015年我国工业机器人产量为32996台,同比增长21.7%。2016年机器人产业将继续保持快速增长,今年一季度我国工业机器人产量为11497台,同比增长19.9%。此外,数据显示,2015年我国自主品牌工业机器人生产销售达22257台,同比增长31.3%。国产自主品牌得到了一定程度的发展,但与发达国家相比,仍有一定差距。 2016年未来全球工业机器人市场趋势包括:大国政策主导,促使工业与服务机器人市场增长;汽车工业仍为工业机器人主要用户;双臂协力型机器人为工业机器人市场新亮点。 一、什么是工业机器人 工业机器人是一种通过重复编程和自动控制,能够完成制造过程中某些操作任务的多功能、多自由度的机电一体化自动机械装备和系统,它结合制造主机或生产线,可以组成单机或多机自动化系统,在无人参与下,实现搬运、焊接、装配和喷涂等多种生产作业。 当前,工业机器人技术和产业迅速发展,在生产中应用日益广泛,已成为现代制造生产中重要的高度自动化装备。
二、工业机器人的特点 自20世纪60年代初第一代机器人在美国问世以来,工业机器人的研制和应用有了飞速的发展,但工业机器人最显著的特点归纳有以下几个。 1.可编程。生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统(FMS)中的一个重要组成部分。 2.拟人化。工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。 3.通用性。除了专门设计的专用的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性。比如,更换工业机器人手部末端操作器(手爪、工具等)便可执行不同的作业任务。 4.机电一体化。工业机器人技术涉及的学科相当广泛,但是归纳起来是机械学和微电子学的结合——机电一体化技术。第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都和微电子技术的应用,特别是计算机技术的应用密切相关。因此,机器人技术的发展必将带动其他技术的发展,机器人技术的发展和应用水平也可以验证一个国家科学技术和工业技术的发展和水平。 三、工业机器人常见的五大应用领域 1.机械加工应用(2%) 机械加工行业机器人应用量并不高,只占了2%,原因大概也是因为市面上有许多
1引言 齿轮传动是现代机械中应用最广的一种传动形式。它的主要优点是:①瞬时传动比恒定、工作平稳、传动准确可靠,可传递空间任意两轴之间的运动和动力;②适用的功率和速度范围广;③传动效率高,η=0.92-0.98;④工作可靠、使用寿命长;⑤外轮廓尺寸小、结构紧凑。由齿轮、轴、轴承及箱体组成的齿轮减速器,用于原动机和工作机或执行机构之间,起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。 国内的减速器多以齿轮传动、蜗杆传动为主,但普遍存在着功率与重量比小,或者传动比大而机械效率过低的问题。另外,材料品质和工艺水平上还有许多弱点,特别是大型的减速器问题更突出,使用寿命不长。国外的减速器,以德国、丹麦和日本处于领先地位,特别在材料和制造工艺方面占据优势,减速器工作可靠性好,使用寿命长。但其传动形式仍以定轴齿轮传动为主,体积和重量问题,也未解决好。 当今的减速器是向着大功率、大传动比、小体积、高机械效率以及使用寿命长的方向发展。减速器与电动机的连体结构,也是大力开拓的形式,并已生产多种结构形式和多种功率型号的产品。近十几年来,由于近代计算机技术与数控技术的发展,使得机械加工精度,加工效率大大提高,从而推动了机械传动产品的多样化,整机配套的模块化,标准化,以及造型设计艺术化,使产品更加精致,美观化。 在21世纪成套机械装备中,齿轮仍然是机械传动的基本部件。CNC机床和工艺技术的发展,推动了机械传动结构的飞速发展。在传动系统设计中的电子控制、液压传动、齿轮、带链的混合传动,将成为变速箱设计中优化传动组合的方向。在传动设计中的学科交叉,将成为新型传动产品发展的重要趋势。
2 传动装置总体设计 2.0设计任务书 1设计任务 设计带式输送机的传动系统,采用两级圆柱直齿齿轮减速器传动。 2 设计要求 (1)外形美观,结构合理,性能可靠,工艺性好; (2)多有图纸符合国家标准要求; (3)按毕业设计(论文)要求完成相关资料整理装订工作。 3 原始数据 (1)运输带工作拉力 F=4KN (2)运输带工作速度V=2.0m/s (3)输送带滚筒直径 D=450mm η (4)传动效率96 = .0 4工作条件 两班制工作,空载起动,载荷平稳,常温下连续(单向)运转,工作环境多尘,中小批量生产,使用期限10年,年工作300天。 2.1 确定传动方案
认识工业机器人 机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。而且,机器人应用情况是反映一个国家工业自动化水平的重要标志。本次任务的主要内容就是了解工业机器人的现状和发展趋势;通过现场参观,认识工业机器人相关企业;现场观摩或在技术人员的指导下操作ABB工业机器人,了解其基本组成。 一、工业机器人的定义及特点 1.工业机器人的定义 国际上对机器人的定义有很多。 美国机器人协会(RIA)将工业机器人定义为:“工业机器人是用来进行搬运材料、零部件、工具等可再编程的多功能机械手,或通过不同程序的调用来完成各种工作任务的特种装置。” 日本工业机器人协会(JIRA)将工业机器人定义为:“工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。” 在我国1989年的国际草案中,工业机器人被定义为:“一种自动定位控制,可重复编程、多功能的、多自由度的操作机。操作机被定义为:具有和人手臂相似的动作功能,可在空间抓取物体或进行其他操作的机械装置。” 国际标准化组织(ISO)曾于1984年将工业机器人定义为:“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程的操作来处理各种材料、零件、工具和专用装置,以执行各种任务。” 2.工业机器人的特点 (1)可编程
生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量、多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。 (2)拟人化 工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有计算机。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语音功能传感器等。 (3)通用性 除了专门设计的专用的工业机器人外,一般机器人在执行不同的作业任务时具有较好的通用性。例如,更换工业机器人手部末端执行器(手爪、工具等)便可执行不同的作业任务。 (4)机电一体化 第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是与计算机技术的应用密切相关。工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化及精细物流等先进制造技术,技术综合性强。 二、工业机器人的历史和发展趋势 1. 工业机器人的诞生 “机器人”(Robot)这一术语是1921年捷克著名剧作家、科幻文学家、童话寓言家卡雷尔·恰佩克首创的,它成了“机器人”的起源,此后一直沿用至今。不过,人类对于机器人的梦想却已延续数千年之久。如古希腊古罗马神话中冶炼之神用黄金打造的机械仆人、希腊神话《阿鲁哥探险船》中的青铜巨人泰洛斯、犹太传说中的泥土巨人、我国西周时代能歌善舞的木偶“倡者”和三国时期诸葛亮的“木牛流马”传说等。而到了现代,人类对于机器人的向往,从机器人频繁出现在科幻小说和电影中已不难看出,科技的进步让机器人不仅停留在科幻故事
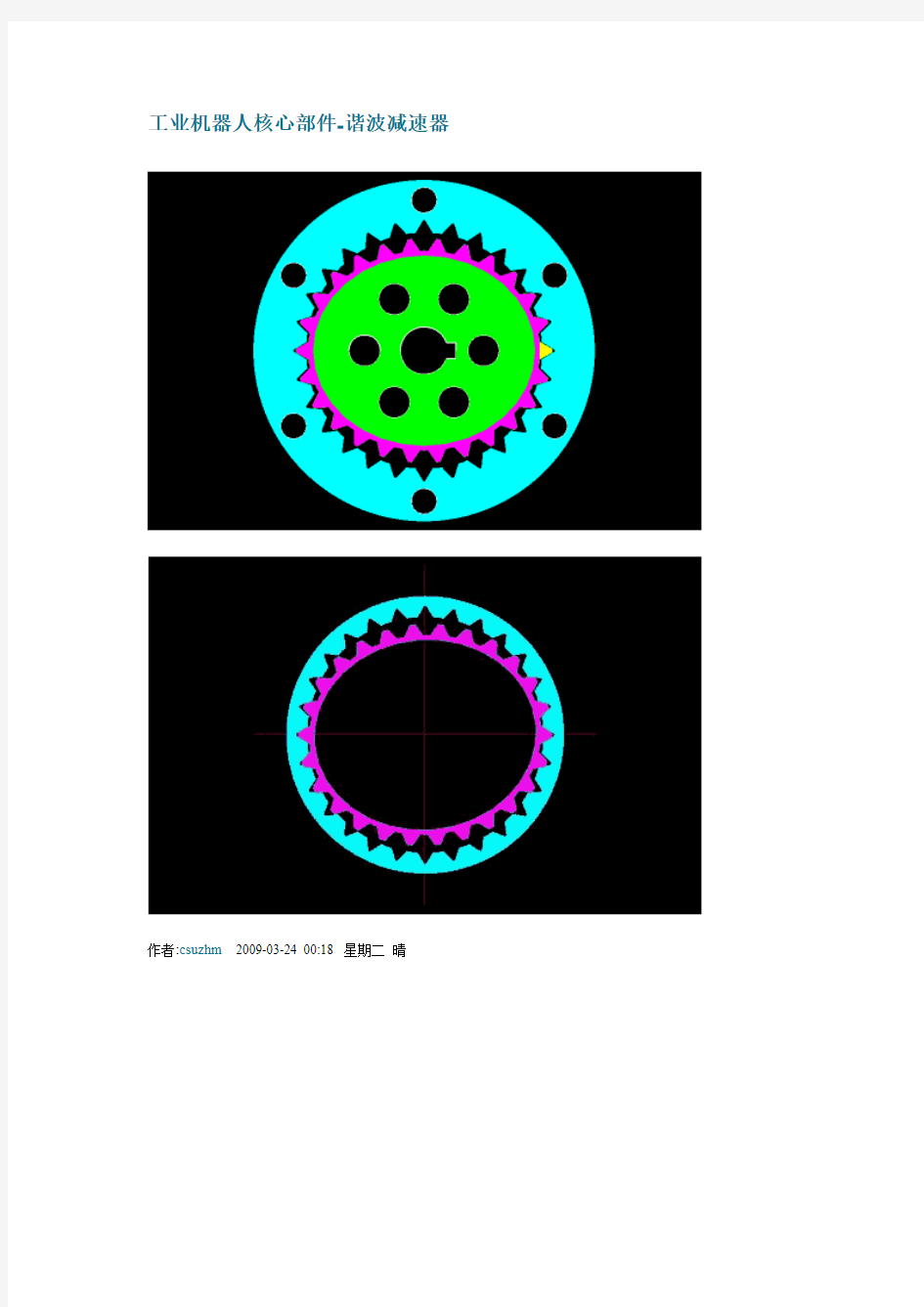
工业机器人核心部件-谐波减速器
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有: 1)RV减速机构; 2)谐波减速机械; 3)摆线针轮减速机构; 4)行星齿轮减速机械; 5)无侧隙减速机构; 6)蜗轮减速机构; 7)滚珠丝杠机构; 8)金属带/齿形减速机构; 9)球减速机构。 其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改): 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 (一)传动原理 它主要由三个基本构件组成: (1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮; (2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮; (3)波发生器H,它相当于行星架。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。 在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以 n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。 谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即 z2-z1=n 式中 z2、z2--分别为刚轮与柔轮的齿数。 当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为 i=-z1/(z2-z1) 双波传动中,z2-z1=2,柔轮齿数很多。上式负号表示柔轮的转向与波发生器的转向相反。由此可看出,谐波减速器可获得很大的传动比。 (二)特点 1.承载能力高谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数(重叠系数)比较多,因而单位面积载荷小,承载能力较其他传动形式高。 2.传动比大单级谐波齿轮传动的传动比,可达 i=70~500。 3.体积小、重量轻。 4.传动效率高、寿命长。 5.传动平稳、无冲击,无噪音,运动精度高。 6.由于柔轮承受较大的交变载荷,因而对柔轮材料的抗疲劳强度、加工和热处理要求较高,工艺复杂。 谐波减速器在国内于六七十年代才开始研制,到目前已有不少厂家专门生产,并形成系列化。广泛应用于电子、航天航空、机器人等行业,由于它的独特优点,在化工行业的应用也逐渐增多。
我国机器人减速器企业详细介绍分析 减速器在机械传动领域是连接动力源和执行机构之间的中间装置,通常它把电动机、内燃机等高速运转的动力通过输入轴上的小齿轮啮合输出轴上的大齿轮来达到减速的目的,并传递更大的转矩。目前成熟并标准化的减速器有:圆柱齿轮减速器、涡轮减速器、行星减速器、行星齿轮减速器、RV减速器、摆线针轮减速器和谐波减速器。 工业机器人是一种装备有记忆装置和末端执行装置的、能够完成各种移动或工艺来代替人类劳动的通用机器。通常在生产中能代替工人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业。它能够提升生产的效率和产品的质量,是企业补充和替代劳动力的有效方案。目前工业机器人发展特点是高速、精确、机身机构紧凑、多自由度和提高刚性,重点领域还要求重载或响应速度快。例如汽车整车生产的电焊机器人负载大部分在150-300Kg间,而电子领域的装配机器人则需要快速的响应流水线上的配件。减速器在机械传动领域是连接动力源和执行机构之间的中间装置,通常它把电动机、内燃机等高速运转的动力通过输入轴上的小齿轮啮合输出轴上的大齿轮来达到减速的目的,并传递更大的转矩。目前成熟并标准化的减速器有:圆柱齿轮减速器、涡轮减速器、行星减速器、行星齿轮减速器、RV减速器、摆线针轮减速器和谐波减速器。80-90年代以来,在新兴产业如航空航天、机器人和医疗器械等发展的需求下,需要结构简单紧凑、传递功率大、噪声低、传动平稳的高性能精密减速器,其中RV减速器和谐波减速器是精密减速器中重要的两种减速器。 近两年,在有了相对的沉淀之后,国产减速器企业无论是在技术上,还是在成本控制上,都取得了一定的突破。虽然市场依旧由国外减速器主导,但是国产减速器也在不断进步。下面,就让我们一起来看一下,国产减速器企业都有哪些吧! 谐波减速器 苏州绿的 公司从2003年开始从事机器人用精密谐波减速器研发,目前拥有40多项国家专利。
细解工业机器人的关键零部件 当前,工业机器人产业市场呈现爆炸式增长势头,而工业机器人产业的发展必将为其核心零配件应用提供众多机会。工业机器人除了本体以外,主要有三大核心零配件,控制器、伺服系统、减速器,它们占到工业机器人成本的70%左右。而随着人工智能浪潮的越演越烈,机器视觉系统也成了工业机器人不可或缺的一部分。 工业机器人的大脑:控制器 控制器是机器人的大脑,发布和传递动作指令。包括硬件和软件两部分:硬件就是工业控制板卡,软件部分主要是控制算法、二次开发等。目前国外主流机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发,各品牌机器人均有自己的控制系统与之匹配,国内企业控制器尚未形成市场竞争优势。 现有的工业机器人控制器封闭构造,带来开放性差、软件独立性差、容错性差、扩展性差、缺乏网络功能等缺点,已不能适应智能化和柔性化要求。开发标准化、开放化控制器是工业机器人控制器的一个发展方向,存在巨大发展空间。到2020年我国工业机器人控制器市场规模有望达到12亿元左右,未来五年复合增速约为27%。 工业机器人的眼睛:机器视觉系统 工业自动化的真正实现,需要高度智能化的工业机器人去替代人类的一部分工作,而显然,如果想让机器人去很好的替代人类工作的话,首先要做的就是让它们得能“看”到才行,这就要依赖机器视觉系统来完成。 机器视觉系统可以通过机器视觉产品即图像摄取装置,将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号,然后图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。到2021年,机器视觉全球市场价值预计将达285亿美元,
机械设计课程设计 : 班级: 学号: 指导教师: 成绩:
日期:2011 年6 月 目录 1. 设计目的 (2) 2. 设计方案 (3) 3. 电机选择 (5) 4. 装置运动动力参数计算 (7) 5.带传动设计 (9) 6.齿轮设计 (18) 7.轴类零件设计 (28) 8.轴承的寿命计算 (31) 9.键连接的校核 (32) 10.润滑及密封类型选择 (33) 11.减速器附件设计 (33) 12.心得体会 (34) 13.参考文献 (35)
1. 设计目的 机械设计课程是培养学生具有机械设计能力的技术基础课。课程设计则是机械设计课程的实践性教学环节,同时也是高等工科院校大多数专业学生第一次全面的设计能力训练,其目的是: (1)通过课程设计实践,树立正确的设计思想,增强创新意识,培养综合运用机械设计课程和其他先修课程的理论与实际知识去分析和解决机械设计问题的能力。 (2)学习机械设计的一般方法,掌握机械设计的一般规律。 (3)通过制定设计方案,合理选择传动机构和零件类型,正确计算零件工作能力,确定尺寸和掌握机械零件,以较全面的考虑制造工艺,使用和维护要求,之后进行结构设计,达到了解和掌握机械零件,机械传动装置或简单机械的设计过程和方法。 (4)学习进行机械设计基础技能的训练,例如:计算,绘图,查阅设计资料和手册,运用标准和规等。 2. 设计方案及要求 据所给题目:设计一带式输送机的传动装置(两级展开式圆柱直齿轮减速器)方案图如下:
1—输送带 2—电动机 3—V带传动 4—减速器 技术与条件说明: 1)传动装置的使用寿命预定为8年每年按350天计算,每天16小时计算; 2)工作情况:单向运输,载荷平稳,室工作,有粉尘,环境温度不超过35度; 3)电动机的电源为三相交流电,电压为380/220伏; 4)运动要求:输送带运动速度误差不超过%5;滚筒传动效率 0.96; 5)检修周期:半年小修,两年中修,四年大修。 设计要求 1)减速器装配图1; 2)零件图2(低速级齿轮,低速级轴);
浅谈对工业机器人的认识 人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据 。,工业机器人做为完成任务的机具,按用途包括以下几种:(a)搬运、上料机器人;(b)喷涞机器人;(c)焊接与切割机器人,点焊与弧焊;(d)装配机器人;(e)最后工序机器人,完成打毛剌、分类、检验、包装等工作。可见工业机器人的用途实为广泛。 工业机器人技术特点: (1)技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的最高体现。 (2)技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的全面延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。
(3)应用领域广泛工业机器人与自动化成套装备是生产过程的关键设备,可用于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、IC装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,应用领域非常广泛。 (4)技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,技术综合性强。 工业机器人,对我国的经济所做出的贡献是可想而知的。随着我国的建筑业、采矿业、铁路和公共建设、水力工程建设和工程机械、建筑机械等其他制造行业的规模扩大和技术升级也将对工业机器人产业起到推动作用。建筑工程机械的结构件多为焊接件,通过工业机器人焊接可提高焊接质量和效率,满足市场的需求。 我国工业机器人的发展趋势:根据2l世纪初我国国民经济对先进制造及自动化技术的需求,瞄准国际前沿高技术发展方向创新性地研究和开发工业机器人技术领域的基础技术、产品技术和系统技术。我国对未来工业机器人技术发展的重点有: 1、危险,恶劣环境作业机器人:主要有防暴、高压带电清扫、星球检测、油汽管道等机器人; 2、,医用机器人:主要有脑外科手术辅助机器人,遥控操作辅助正骨等; 3、仿生机器人:主要有移动机器人,网络遥控操作机器人等。其发展趋势是智能化、低成本、高可靠性和易于集成。
工业机器人核心部件-谐波减速器 晴星期二2009-03-24 00:18 csuzhm:作 者.
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构; 2)谐波减速机械; 3)摆线针轮减速机构; 4)行星齿轮减速机械; 5)无侧隙减速机构; 6)蜗轮减速机构; 7)滚珠丝杠机构; 8)金属带/齿形减速机构; 9)球减速机构。 其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改): 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 (一)传动原理 它主要由三个基本构件组成: (1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮; (2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮; (3)波发生器H,它相当于行星架。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。 波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由. 啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。 在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。 谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即 z2-z1=n 式中z2、z2--分别为刚轮与柔轮的齿数。 当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为
RV减速器与谐波减速器的调研报告 当我们在无限憧憬机器人的时候,我们缺很少知道在机器人的所有零部件中,有两样东西一直是我们国人无法跨越过去的障碍,那就是伺服电机和精密减速器。随着自动化和电子电器理论的日趋成熟,国人在伺服电机方面已经出了坚实的一步,虽然在目前国内的伺服电机75%仍然靠进口,但对于中小功率的伺服电机,中国不少企业,如深圳的英威腾、汇川科技、大连的安迪的产品已经在性能上基本满足中国企业的需求。可是对于精密减速器,特别是机器人关节上需要使用的RV减速器和谐波减速器,目前国内研究仍然停留在论文和数据库当中,翻遍所有关于生产这两种减速器的国产厂家,我们仍然难以找出哪怕一家产品可以在性能上满足国内机器人产业的需求。 直到今天,中国仍然不具备设计和制造这两种减速器的能力,“十二五”时期,国家“863”计划将其列入重点攻克的技术瓶颈。国内顶尖大学和科研机构几年公关也只有论文,没有实物。那么,我们与国外在精密减速器方面的差距到底在哪里?为什么在专利技术早已公开的今天,我们仍让难以跨越这道已经成型了近半个世纪的鸿沟? 为什么机器人要用RV减速器和谐波减速器? 我们常用的减速大致有下面几类:摆线减速器、硬齿面圆柱齿轮减速器、行星齿轮减速器、软齿面减速器。三环减速器、起重减速器。蜗杆减速器。轴装式硬齿面减速器,无极变速器。而RV减速器和谐波减速器与上述减速器的区别在于,RV减速器是行星减速器和摆线减速器的组成一个二级减速器,谐波减速器则是一种靠波发生器使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。这两种减速器相对与其他减速器而言,具有以下优势:(1)传动速比大,(2)承载能力高,(3)传动精度高,(4)传动效率高、运动平稳,(5)结构简单。零件数少、安装方便,(6)体积小、重量轻。传统的齿轮减速器体积大。重量重。减速比小、传动效率低,特别是在无法消除多级减速后的雷击误差,对于机器人在控制末端精度要求甚高的工况下,目前只有RV和谐波减速器可以胜任。 RV减速器和谐波减速器的发展史 RV减速器的诞生 德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆线行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称作摆线针轮行星齿轮传动。 RV传动是一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列有点。 1、1925年德国人劳伦兹·勃朗创造性地提出RV减速器原理 2、1931年劳伦兹·勃朗在德国慕尼黑创建了“赛古乐”股份有限公司,最先开始了摆线减速器的制造和销售。 3、1939年,日本住友公司和“赛古乐”公司签订了技术合作协议,并生产销售; 4、1944年,日本人帝人精机成立,这个未来的RV减速机霸主,在飞机制造、纺织机械、机床等多个行业硕果累累; 5、1950年-1960年,摆线磨床的出现,解决了摆线齿形精度不高的难题,使摆线传动得到了进一步的发展; 6、1956年,日本纳博克公司发售全球第一个自动门,在市场上崭露头角; 7、1980年左右,日本帝人精机提出RV传动理论,着手应用于机器人行业; 8、1986年,日本帝人精机RV减速器正式大规模生产,取得成功; 9、2003年,帝人精机和纳博克合并组成Nabtesco(纳博特斯克)公司,并取得快速发展,现在已成为RV减速机行业的领头羊,占据了60%以上的市场,特别在中/重符合机器人上,其RV减速器市场占有率高达90%. 谐波减速器的诞生 20世纪50年代中期,随着全球科学技术的发展,美国人马瑟在薄壳弹性变形理论基础上,应用金属的挠性和弹性力学原理发明出来一种新型谐波传动技术,谐波传动技术主要应用于航空航天、工业机器人、精密设备仪器、雷达通讯设备、印刷机械、纺织机械、半导体工业晶圆传送装置。印刷包装机械、医疗器械、金属成型机械、仪器仪表、光学制造仪器、核设施及空气动力实验研究等领域。 谐波传动这项新型技术的出现便引起了全国的重视,1970年引入日本,随之诞生了日本第一家整体运动的领军企业-日本HarmonicDriveSystemsInc.(简称HDSI)。日本HDSI公司生产的HarmonicDrive谐波减速器,具有轻量、小型、传动效率高、减速范围广、精度高等特点,被广泛应用于各种传动系统中,HDSI主要生产和销售各种精密减速装置,当之无愧为整体运动控制的领军企业。为了涵盖谐波减速器不能覆盖到的低减速比领域,HDSI产品还开发了精密行星齿轮减速器HarmonicPlanetary。独特的内齿图形变工艺,可使行星齿轮啮合得更紧、消除背隙,从而将传动误差控制在精密范围内。HDSI最初只是在其国内发展,与之有着长久合作关系的有安川电机、三菱电机及发那科等企业。 近年来,中国工业机器人产业进入新的历时机遇期,以ABB、KUKA、安川、发那科为代表的国际机器人企业纷纷大举进入中国,设立工厂,抢占市场份额。在中国,如手机制造、半导体、液晶生产机械等行业,对小型机器人的需求也是越来越旺盛,然而对于国