中国人民大学附属中学物理第十一章简单机械和功数轴上的距离与动点问题
专题练习(word版
一、初三物理第十一章简单机械和功易错压轴题提优(难)
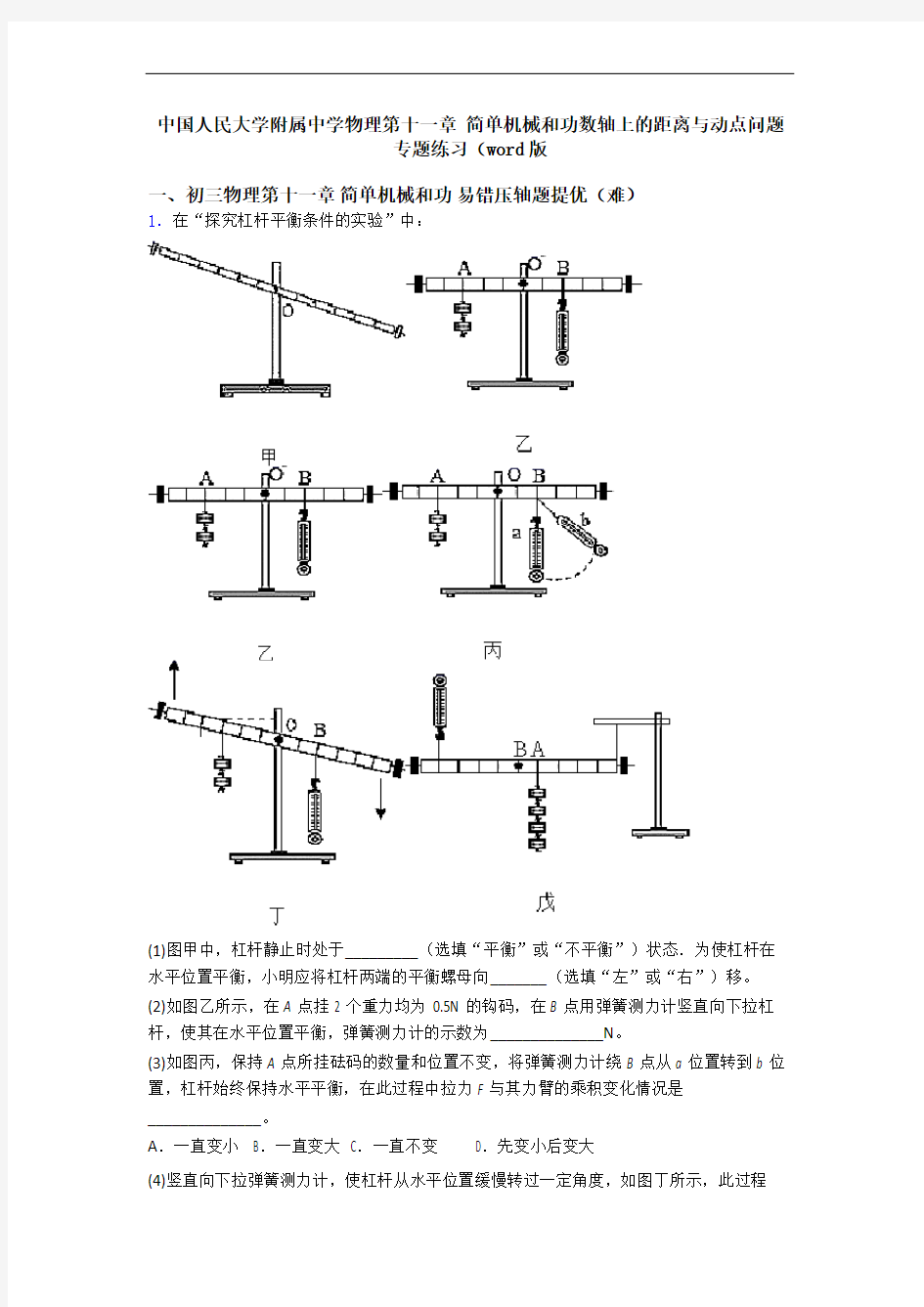
1.在“探究杠杆平衡条件的实验”中:
(1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。
(3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是
______________。
A.一直变小 B.一直变大 C.一直不变 D.先变小后变大
(4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程
中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”或“不变”)。
(5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。
(6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。
(7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填
“>”“=”或“<”)F,杠杆此时的机械效率η′___________η(选择“>”、“=”或“<”)。
【答案】平衡左 1.5 C 变小不变顺时针杠杆自重对杠杆平衡有影响
Gh
×100% > >
Fs
【解析】
【分析】
【详解】
(1)[1]杠杆处于静止状态或匀速转动状态都为杠杆的平衡状态;所以,图甲中实验前没挂钩码时,杠杆处于静止的平衡状态。
[2]由于杠杆左端上翘,调节时重心应向左移动,应将杠杆两端的平衡螺母向左移,使杠杆在水平位置平衡。
(2)[3]如图乙所示,在刻度线A处挂两个钩码,在刻度线B处用调好的弹簧测力计竖直向下拉杠杆,杠杆在水平位置时,每个钩码为G=0.5N,每小格为L,根据杠杆的平衡条件知道,即
2G×3L=F×2L
2×0.5N×3L=F×2L
解得F=1.5N
(3)[4]将测力计绕B点从a位置转动到b位置过程中,钩码的重力不变,其力臂OA不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件知道,拉力F与其力臂的乘积也是不变的。
故选C。
(4)[5][6]力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以拉力大小不变。
(5)[7]根据杠杆平衡条件知道,要使弹簧测力计读数减小,在阻力和阻力臂不变时,需要增大动力臂,当弹簧测力计与杠杆垂直时,动力臂最长,拉力最小,所以需要将弹簧测力计
顺时针转动。 (6)[8]利用如图戊所示装置进行探究,杠杆的重心没有通过支点,杠杆的自重对杠杆平衡有
影响。
(7)[9]由W W η=有总
知道,将总重为 G 的钩码挂在杠杆 A 处时,杠杆的机械效率 W Gh W Fs
η==有
总 [10]由图示知道,将钩码移动到B 点时,阻力和动力臂都不变,阻力臂增大,由1122
Fl F l =知道,动力将增大,即
F ′>F
[11]将钩码移至B 点,提升相同高度,有用功相同,弹簧测力计竖直移动的距离不同,B 点
时杠杆上上升的高度小些,做的额外功小些,所以机械效率变大,即
η′>η
2.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支
架,弹簧测力计,刻度尺,细线和相同的重0.5 N 重的钩码若干个。
(1)如图A 所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”
或”右”)调节,直到杠杆在水平位置平衡;
(2)在图B 中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______
(选填“左”或”右”)倾斜;
(3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支
点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他
做了如图C 的实验,已知杠杆上每个小格长度为5 cm ,每个钩码重0.5 N ,当弹簧测力计
斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×
动力臂______(选填“等于”或“不等于”)阻力×阻力臂。实验C______(选填“能”
或”不能”)说明甲同学结论是错误的。
【答案】右 右 等于 能
【解析】
【分析】
【详解】
(1)[1]图A 中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。
(2)[2]在图B 中,据杠杆的平衡条件得
3G?2F=2G?3L
在左右两边同时增加一个相同的钩码,则左右两边分别变成
4G?2F,3G?3L
而
4G?2F<3G?3L
所以杠杆向右倾斜。
(3)[3][4]由图C知,此时
4×0.5N×3×0.5cm=3N×1
2
×4×0.5cm
即:动力×动力臂=阻力×阻力臂。而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。
3.如图所示是小明和小红利用刻度均匀的杠杆探究“杠杆平衡条件”的实验装置。
(1)在实验前,杠杆静止在图甲所示的位置,此时杠杆处于_______(选填“平衡”或“不平衡”)状态;调节平衡螺母使杠杆在水平位置平衡的目的是消除杠杆自重对实验的影响,同时方便___________;
(2)杠杆平衡后,小明在左右两侧分别挂上如图乙所示的钩码,杠杆不能在水平位置平衡,在不增加钩码且不改变钩码悬挂点位置的前提下为了使杠杆重新在水平位置平衡,只需将____________即可;
(3)为获得更多组数据,他们取下右侧钩码,小明和小红分别设计了两种实验方案,小明的方案如图丙所示,小红的方案如图丁所示。你认为__________(“小明”或“小红”)的方案更合理,理由是___________;
(拓展)探究杠杆的平衡条件后,小明又利用杠杆测量了石块的密度,实验装置如图所示。
实验步骤如下:
①将石块悬挂在杠杆左侧,通过调节细线长度使石块缓慢浸没在下方裝满水的溢水杯中
(未触底),同时用质量忽略不计的薄塑料桶接住溢出的水;
②将薄塑料桶悬挂在杠杆右侧,调节塑料桶的悬挂位置,使杠杆在水平方向平衡,如图所
示;
③测量出AB 两悬挂点距支点O 的距离分别为10m 和15cm ,则石块密度为
___________kg/m 3。
【答案】平衡 测量力臂 左侧的钩码去掉一个 小明 排除测力计的重力对实验的影响
2.5×103
【解析】
【分析】
【详解】
(1)[1]杠杆静止时,无论杆身是否水平,都为杠杆的平衡状态。
[2]杠杆在水平位置平衡,其力臂和杆身重合,可以方便测量力臂的大小。
(2)[3]在乙图中,杠杆左右两侧所挂钩码的重力可分别视为动力和阻力,两侧钩码的悬挂点
可分别视为动力臂和阻力臂,根据杠杆的平衡条件1122Fl F l =可知,只需将左侧的钩码去
掉一个即可满足杠杆在水平位置平衡。
(3)[4][5]对比丙、丁两图可知,小明的实验方案更加理想;因为弹簧测力计本身受到重力,
小明的方案可以排除测力计的重力对实验的影响。
(3)①[6]设石块排开的水的重力为G 水,由阿基米德原理可知,石块受到的浮力
F G =浮水
水中的石块为平衡状态,故其对绳的拉力
F G F G G =-=-石石浮水
根据杠杆和平衡条件可得
F OA
G OB ?=?水
即
153102
G G OB cm G OA cm -===石水水 由上式整理可得
32
V g V g V g ρρρ-=石石水水水水 由于石块排开水的体积和石块自身体积相等,所以上式可简化为
32
ρρρ-=石水水 所以石块的密度
333355 1.010kg/m 2.510kg/m 22
ρρ==??=?石水
4.同学们在探究影响浮力大小的因素时,发现手中的弹簧测力计损坏了,聪明的小强同学
利用刻度均匀的杠杆和钩码(每只重0.5N )替代弹簧测力计顺利地完成了该实验。以下是
小强同学的实验操作,请你帮他完善该实验探究。
(1)将杠杆安装在支架上,静止时如图1所示,应将平衡螺母向______(选填“右”或
“左”)调节,使杠杆在水平位置平衡;
(2)如图2甲所示,将重2N 的物体G 挂在A 点,两只钩码挂在B 点时,杠杆在水平位置平
衡;
(3)将物体G 部分浸入水中(如图2乙所示),两只钩码移到C 点时,杠杆在水平位置平
衡;
(4)将物体G 浸没于水中(如图2丙所示),两只钩码移到D 点时,杠杆在水平位置平衡;
(5)将物体G 浸没于盐水中(如图2丁所示),两只钩码移到E 点时,杠杆在水平位置平
衡。
分析与论证:分析比较(2)、(3)、(4)可得:物体G 所受浮力大小与______有关;分析比较
(2)、(4)、(5)可得:物体G 所受浮力大小与有______关;由题中信息计算物体G 的体积
V =______m 3,盐水的密度ρ=盐水______kg/m 3。(331.010kg/m ρ=?水,g =10N/kg )
【答案】右 物体排开液体的体积 液体的密度 1.0×10-4 1.125×103
【解析】
【分析】
【详解】
[1]杠杆在如图1位置平衡后,要使杠杆在水平位置重新平衡,应将平衡螺母向右调节。
[2]步骤(2)、(3)、(4)是让物体未浸入、部分浸入和浸没于水中,而钩码逐渐靠近支点,说明
物体G 所受的浮力逐渐变大,所以可得物体G 所受的浮力大小与排开液体的体积有关。
[3]步骤(4)(5)是让物体G 分别浸没在水中和盐水中,所以比较的是浮力大小与液体密度的关
系。
[4]由步骤(4)及杠杆的平衡条件得
(G 物-F 浮)?4L =1N ?4L ,(2N-F 浮)?4L =1N ?4L
所以
F浮=1N
由阿基米德原理有,物体的体积
43
33
1N
10m
1.010kg/m10N/kg
F
V V
g
ρ
-
====
??
浮
物排
水
[5]由步骤(5)及杠杆的平衡条件得
(2N-F浮')?4L=1N?3.5L
所以
F浮'=1.125N
由阿基米德原理有,盐水的密度
33
43
1.125N
1.12510kg/m
10N/kg10m
F
gV
ρ
-
===?
?
浮
盐水
物
'
5.小明在探究杠杆的平衡条件的实验中,以杠杆中点为支点。
(1)小明在杠杆两侧挂上钩码,调节钩码的数量和位置直到杠杆水平平衡,如图甲所示,此时小明将两边钩码同时向远离支点方向移动相同的距离后,杠杆_____(选填“左”或“右”)端下沉;
(2)小明在得出杠杆平衡条件后,利用杠杆平衡条件解决问题:
①如图乙所示,有一根均匀铁棒BC,其长为L,O点为其重心,其所受重力300N;
OA=
4
L
,为了不使这根铁棒的B端下沉,所需外力F至少应为_____N;若F的方向不变,微微抬起这根铁棒的B端,所需外力F'至少应为_____N;
②如图丙所示,C物体静止在水平地面上时,对地面的压强为6×105Pa。现将C物体用细绳挂在轻质杠杆的A端,杠杆的B端悬挂D物体,当杠杆在水平位置平衡时,C物体对地面的压强为2×105Pa,已知:D物体的质量为2kg,OA :AB=1:4。要使C物体恰好被细绳拉离地面,则可以移动支点O的位置,使O'A :AB=______。
【答案】左 100 150 1:7
【解析】
【分析】
【详解】
(1)[1]设图甲中的一个钩码重力为G,杠杆一小格的长度为l,据杠杆的平衡条件有
3G?2l=2G?3l
小明将两边钩码同时远离支点移动nl距离后,杠杆左右两边变成
3G ?(2l +nl )=(3n +6)Gl ,2G ?(3l +nl )=(2n +6)Gl
而
(3n +6)Gl >(2n +6)Gl
所以杠杆左端下沉。
(2)①[2]据题意知,为了不使铁棒的B 端下沉,需用外力来保持平衡,此时铁棒的A 为杠杆
的支点,阻力臂为OA =4L ,动力臂为AB =34
L ,据杠杆平衡条件有 G 1?4L =F ?34
L 所以此时的外力
111300N 100N 33
F G ==?= [3]要将铁棒B 端稍微抬起,此时C 变成杠杆的支点,则
12
L L G F ?
=?' 所以此时的外力 111300N 150N 22
F G ==?=' ②[4]由题意知,D 物体的重力
G 2=mg =2kg×10N/kg=20N
挂上D 物体,杠杆在水平位置平衡时,设绳子对A 端的拉力为F 1,则有
F 1?OA =
G 2?OB
即
1220N 480N AB F G OA
=?=?= 悬挂D 物体前后,C 物体对地面压强变化
?p =p 1-p 2=6×105Pa-2×105Pa=4×105Pa
那么C 物体与地面的接触面积
425110m 10Pa
80N 24F S p -=
==??? 则C 物体的重力 G 3=F C =p 1S =6×105Pa×2×10-4m 2=120N
要使C 物体恰好被拉离地面,则A 端受到的拉力
F 2=
G 3=120N
那么
G 3?O 'A =G 2?O 'B
即
120N ?O 'A =20N ?O 'B
所以
O 'A :O 'B =1:6
那么
O 'A :AB =1:7
6.在做“探究杠杆的平衡条件”的实验中:
(1)如图甲所示,为使杠杆在______位置平衡,可以将左端的平衡螺母向______调;
(2)调节平衡后,在杠杆两侧挂不同数量的钩码,移动钩码位置,使杠杆在水平位置再次平
衡,并记录相关数据。改变钩码的数量及位置多次实验,小明得出杠杆的平衡条件
______。如图乙所示,A 、B 两点分别增加一个钩码,则杠杆______(选填“左端下沉”、
“右端下沉”或“仍保持平衡”);
(3)如图丙所示,若不在B 点挂钩码,改用弹簧测力计在B 点向下拉杠杆,弹簧测力计由竖
直方向逐渐向左转动,杠杆始终保持水平平衡,则弹簧测力计的示数将逐渐______(选填
“增大”或“减小”),原因是弹簧测力计拉力的力臂在______(选填“增大”或“减
小”)。
【答案】水平 左 动力×动力臂=阻力×阻力臂或F 1L 1=F 2L 2 右端下沉 增大 减小
【解析】
【分析】
【详解】
(1)[1][2]如图甲所示,杠杆右端下沉,左端上翘,应该将左端的平衡螺母向左调,使杠杆重
新在水平位置平衡。
(2)[3]如图乙所示,假设一个钩码重力为G ,横杆上一小格为L ,调节平衡后,在杠杆两侧
挂不同数量的钩码,移动钩码位置,使杠杆在水平位置再次平衡,并记录相关数据。得到
左边= F 2L 2=3G ×2L =6GL
右边= F 1L 1=2G ×3L =6GL
左边等于右边,改变钩码的数量及位置多次实验,左边依然等于右边,小明据此得出杠杆
的平衡条件:动力×动力臂=阻力×阻力臂或F 1L 1=F 2L 2
[4]如图乙所示,A 、B 两点分别增加一个钩码,则
428G L GL '=?=左边
339G L GL '=?=右边
各自增加一个钩码后,右边大于左边,所以杠杆右端下沉。
(3)[5][6]如图丙所示,A 点钩码数量不变,钩码对杠杆施加的拉力方向不变,现在将B 点的
弹簧测力计由竖直方向逐渐向左转动,则弹簧测力计拉力的力臂减小,为使杠杆始终保持
水平平衡,根据杠杆的平衡条件可知,则弹簧测力计拉力增大,即弹簧测力计的示数将逐
渐增大。
7.如图为测量滑轮组机械效率的实验装置,钩码总重6N 。
(1)实验时要竖直向上______拉动弹簧测力计,由图可知拉力大小为______N ,若钩码上升
的高度为8cm ,则弹簧测力计向上移动______cm ,该滑轮组的机械效率为_________;
(2)在弹簧测力计静止时进行读数,则他这样得出的机械效率与实际值相比_____;(选填
“偏小”、“偏大”或“相等”)
(3)若仅增加钩码的个数,该滑轮组的机械效率将________。(选填“增大”、“减小”或
“不变”)
【答案】匀速 2.4 24 83.3 % 偏大 增大
【解析】
【分析】
【详解】
(1)[1]在实验中,应竖直向上匀速拉动弹簧测力计,才能准确测出拉力的大小。
[2]由图可知,弹簧测力计的分度值为0.2N ,所以其为2.4N ,即拉力的大小为2.4N 。
[3]由图可知,滑轮组承重绳子的根数为3根,当钩码上升8cm ,则弹簧测力计向上移动的
距离为
8cm×3=24cm
[4]实验中,所做的有用功
W 有=Gh =6N×0.08m=0.48J 通过滑轮组所做的总功
W 总=Fs =2.4N×0.24m=0.576J
则机械效率
0.48J 83.3%0.576J
W W η===有总 (2)[5]实验中,若在静止时读弹簧测力计的示数,会造成拉力比实际的拉力小,因为静止时
绳子与滑轮间没有摩擦,那么求出的总功也会偏小,而有用功的大小不变,那么机械效率
会偏大。
(3)[6]实验中仅增大钩码的个数,那么有用功随之增大,而额外功不变,那么机械效率会增
大。
8.某实验小组进行测量滑轮组机械效率的实验,先用弹簧测力计测量钩码所受的重力G
(如图甲),再按图乙所示的连接方式组装好滑轮组,并分别记下钩码和弹簧测力计的起
始位置:
(1)如图乙中,为了测量绳子自由端的拉力F ,A 同学在缓慢匀速提升时读数,B 同学在弹簧
测力计静止时读数,然后把测得各个量数值,代入机械效率的公式,计算出机械效率的
值,这两位同学_______(选填“A ”或“B ”)操作是正确的;
(2)按照A 同学的测量方法,测出的拉力F 与钩码所受重力G 的大小关系为F ______(选填
“大于”、“小于”或“等于”)3
G ; (3)实验中要分别记下钩码和弹簧测力计的起始位置,是为了_________。
【答案】A
大于 测量钩码和弹簧测力计移动的距离
【解析】
【分析】
(1)在使用滑轮组时,滑轮组还要克服一些机械摩擦,所以要测量滑轮组的机械效率,需使
物体上升进行读数。
(2)使用滑轮组时,拉力不仅要克服物体的重力,还要克服动滑轮的重力及机械摩擦。
(3)要测滑轮组的机械效率,需测出G 、h 、F 、s ,根据公式100%Gh Fs
η=?计算。所以需要测量钩码和弹簧测力计移动的距离,从而计算有用功和总功。
【详解】
(1)[1]为了测量滑轮组提升物体时的机械效率,所以需在缓慢匀速提升时读数,则A
同学操作正确。
(2)[2]由图知,滑轮组由3段绳子承担物重,则3G F =
,但其成立的条件是不考虑机械自重和摩擦,若考虑的话拉力F 大于3
G 。 (3)[3]为了测量钩码和弹簧测力计移动的距离,从而计算有用功和总功,应分别记下钩码和
弹簧测力计的起始位置。
9.某实验小组利用图示装置研究杠杆的机械效率,实验的主要步骤如下:
①用轻绳悬挂杠杆一端的D点作为支点,在A点用轻绳悬挂总重为G的钩码,
在占点用轻绳竖直悬挂一个弹簧测力计,使杠杆保持水平;
②竖直向上拉动弹簧测力计缓慢匀速上升(保持0点位置不变),在此过程中弹
簧测力计的读数为F,利用刻度尺分别测出A、B两点上升的高度为h1、h2。
回答下列问题:
(1)杠杆机械效率的表达式为η=____________.(用已知或测量的物理量符号表示)
(2)本次实验中,若提升的钩码重一定,则影响杠杆机械效率的主要因素是:___________
(3)若只将钩码的悬挂点由A移至C,O、B位置不变,仍将钩码提升相同的高度,则杠杆的机械效率将_________(选填“变大”、“变小”或“不变”).
【答案】1
2
100%
Gh
Fh
杠杆的自重变大
【解析】
【分析】
【详解】
(1)有用功为W有=Gh1,总功W总=Fh2,则机械效率的表达式
η=
W
W
有
总
×100%=1
2
Gh
Fh×100%.
(2)有用功是提升钩码所做的功,额外功主要是克服杠杆重力做的功,影响机械效率的因素主要是有用功和总功所占的比例;提升的钩码重一定说明有用功一定,所以影响杠杆机械效率的主要因素是杠杆自身的重力.
(3)钩码的悬挂点在A点时,由杠杠的平衡条件得G?OA=F?OB;悬挂点移至C点时,由杠杠的平衡条件得G?OC=F?OB,经对比发现,由OA到OC力臂变大,所以拉力F也变大,杠杆提升的高度减小,额外功减小,因此杠杆的机械效率变大.
10.小明在探究“杠杆平衡条件”的实验中:
(1)小明实验前发现杠杆左端低右端高,要使它在水平位置平衡,应将杠杆右端的平衡螺
母向_______调节。小明调节杠杆在水平位置平衡的主要目的是___________。
(2)小明用弹簧测力计在B 点_________拉(如图甲),才可以在杠杆上直接读出动力臂。
(3)如图乙所示,某同学不改变拉力方向把杠杆由图乙的位置缓慢拉到图丙的位置时,弹
簧秤的示数将_________ 。(选填变大/变小/不变,设杠杆质地均匀,支点恰好在杠杆的中
心,并且不计支点处摩擦)
(4)小明继续研究杠杆的机械效率,他们用轻绳悬挂杠杆一端的O 点作为支点,在B 点
用轻绳悬挂总重为G 的钩码,在A 点用轻绳竖直悬挂一个弹簧测力计测拉力F ,装置如图
丁所示,使杠杆缓慢匀速上升, 用刻度尺分别测出A 、B 两点上升的高度为h 1、h 2;则:
①杠杆机械效率的表达式为η=________。(用测量的物理量符号表示)
②若只将测力计的悬挂点由A 移至C 点,O 、B 位置不变,仍将钩码提升相同的高度,则
杠杆的机械效率将_______(选填变大/变小/不变)。
【答案】右 消除杠杆自重对实验的影响 竖直向下 不变
21
Gh Fh 不变 【解析】
【详解】
(1)[1][2]杠杆左端低右端高,说明杠杆左端较重,要使它在水平位置平衡,应将杠杆右端的
平衡螺母向右调节;小明调节杠杆在水平位置平衡的主要目的是消除杠杆自重对实验的影
响;
(2)[3]为了在杠杆上直接读出动力臂,弹簧测力计的拉力方向应该垂直杠杆,而杠杆在水平
位置平衡,左端的重物拉力向下,那么右端的拉力应该是竖直向下;
(3)[4]某同学不改变拉力方向把杠杆由图乙的位置缓慢拉到图丙的位置过程中,杠杆也是平
衡的,动力臂与阻力臂的比值是不变的,而阻力是不变,根据杠杆的平衡条件可知弹簧测
力计的拉力大小是不变的;
(4)[5]由题意可知,杠杆的有用功是2W Gh =有,总功是1W Fh =总,那么杠杆机械效率是 21
W 100%100%W Gh Fh η=?=?有
总 [6]杠杆提升钩码时,对钩码做有用功,而克服杠杆自身重力做的功是额外功,可以得到关
系式
W W W =+总有额
假设杠杆重心升高的高度是h ,那么可得到
21Gh G h Fh +=杠
钩码的重力G 不变,2h 不变,G 杠不变,只将测力计的悬挂点由A 移至C 点,O 、B 位置
不变,仍将钩码提升相同的高度,杠杆上升的高度h 是不变的,那么可知2Gh G h +杠大小
不变,即1Fh 大小是不变的,根据杠杆机械效率21
100%Gh Fh η=
?可知,机械效率η是不变的。
11.探究杠杆的平衡条件.
实验次数动力F1/N动力臂l1/m阻力F2/N阻力臂l2/m 10.50.2 1.00.1
2 1.00.15 1.50.1
3 3.00.1 2.00.15
(1)小明用如图甲所示装置进行实验,杠杆两端的螺母作用是_________;
(2)小明进行实验并收集到了表中的数据,分析数据可知,杠杆的平衡条件是:
________;
(3)小明又用如图乙所示装置进行实验,弹簧测力计的读数应是_______N(一个钩码重0.5N);
(4)小明想到若铁架台不是在水平桌面上,而是在略微倾斜的桌面上是否影响实验呢?经小组分析不在水平桌面上_______(填“影响”或“不影响”)实验过程。
(5)如图丙所示,小红实验时在一平衡杠杆的两端放上不同数量的相同硬币,杠杆仍在水平位置平衡,她用刻度尺测出l1和l2,则2l1_______(选填“>”“<”或“=”)3l2;(6)探究了杠杆的平衡条件后,小红对天平上游码的质量进行了计算,她用刻度尺测出l1和l2(如图丁所示),则游码的质量为________g.
【答案】实验前,调节杠杆在水平位置平衡(或消除杠杆自重对实验的影响)F1l1=F2l22不影响 > 2.5l1/l2
【解析】
【详解】
(1)[1]杠杆两端的螺母的作用是:实验前,调节杠杆在水平位置平衡,消除杠杆自重对实验的影响;
(2)[2]由表格中数据,
0.5N×0.2m=1.0N×0.1m=0.1N?m;
1.0N×0.15m=1.5N×0.1m=0.15N?m;
3N×0.1m=2.0N×0.15m=0.3N?m;
可知杠杆的平衡条件为:
F1l1=F2l2;
(3)[3]设一格的长度为L,杠杆在水平位置平衡,弹簧测力计的拉力的力臂为1
2
×6L,
由F1l1=F2l2得,
0.5N ×3×4L =F
1×6L ×
12
, 解得:
F 1=2N ; (4)[4]实验过程中,若桌面略微倾斜,不影响调节杠杆在水平位置平衡,不影响实验过程。
(5)[5]设每个硬币的重量为G ,硬币的半径为r ,根据杠杆的平衡条件结合图丙可得:
2G (r +l 1)=3G (r+l 2),
展开可得:
2Gr +2Gl 1=3Gr +3Gl 2,
2Gl 1=Gr +3Gl 2,
所以:
2Gl 1>3Gl 2,
即:
2l 1>3l 2,
(6)[6]以天平的刀口为杠杆的支点,天平的左盘和右盘的质量分别为m 左和m 右,游码的质
量为m ,当游码位于零刻度线时,由杠杆的平衡条件得:
m 左g ×
12l 2+mg ×12l 1=m 右g ×12
l 2; 当游码位于最大值5克时,由杠杆的平衡条件得: (m 左+5)g ×
12 l 2=mg ×12 l 1+m 右g ×12 l 2②; 由②-①得,
5×
12 l 2=m l 1, 解得 :
m =21
2.5l l 。
12.在“测量滑轮组的机械效率”的实验中,小丽与同学们用同一滑轮组进行了三次实验
(如下图所示),实验数据记录如下表.
(1)实验中应沿竖直方向_______拉动弹簧测力计.
(2)表格中编号①处数据为______编号②处数据为______.
(3)第3次实验时,钩码上升的速度为0.1m/s,则拉力的功率为______W .
(4)分析数据可得结论:使用同一滑轮组,提升的物体越重,滑轮组的机械效率越_____(选填
“高”或“低”).
(5)若将此滑轮组换一种绕绳方法,不计绳重及摩擦,提升相同的物体时,滑轮组的机械效率
_____(选填“变大”“变小”或“不变”),理由是_____.
【答案】匀速 88.9% 2.2 0.66 高 不变 见解析
【解析】
【分析】
【详解】
第一空.实验中应沿竖直方向匀速拉动弹簧测力计,此时系统处于平衡状态,测力计示数
等于拉力大小,且测力计示数稳定便于读数;
第二空.第2次实验中滑轮组的机械效率为:
4N 0.1m 100%100%100%88.9%1.5N 0.3m
W Gh W Fs η?=?=?=?≈?有用
总; 第三空.由图丙知,测力计的分度值是0.2N ,测力计的示数是2.2N ;
第四空.由第3次实验数据知,s =0.30m,h =0.1m,所以s =3h ,所以拉力移动的速度为
v =3×0.1m/s=0.3m/s ;根据P Fv =得,拉力的功率为:
2.2N 0.3m/s 0.66W P Fv ==?=;
第五空.分析数据可知,随着钩码重的增加,同一滑轮组的机械效率不断增加,故可得结
论:使用同一滑轮组,提升的物体越重,滑轮组的机械效率越高;
第六空.换一种绕绳方法,不计绳重及摩擦,提升相同的物体时,滑轮组的机械效率不变;
第七空.不计摩擦及绳重时,克服动滑轮重做的功是额外功,换一种绕绳方法时,物重和
动滑轮重都不变,则有用功和总功的比不变,即根据
()=W G h G W W G G G G h η=
=+++有用物物物动
有用物动额外知,滑轮组的机械效率不变. 13.如图,为探究“杠杆的平衡条件”的实验.
(1)实验前,正确安装好杠杆后,调节______使杠杆在水平位置平衡,目的是_______.(2)杠杆平衡后,在图甲所示的A位置挂上两个钩码,可在B位置用弹簧测力计竖直向下拉,使杠杆_______,记录数据.
(3)将弹簧测力计作用在C点,需______(选填“竖直向上”、“竖直向下”)拉弹簧测力计使杠杆平衡,记录数据;若不是竖直拉弹簧测力计,其示数将_______(选填“变大” “不变”或"变小”).通过数据分析可得出杠杆的平衡条件。
(4)利用图乙所示装置迸行拓展实验,当用于探究杠杆平衡条件时,实验结论与杠杆平衡条件不相符,原因是______;当用于研究机械效率时,缓慢拉动弹簧测力计,使钩码升高h,测得杠杆机械效率为η1,将钩码移到B点,仍使钩码升高h测得的机械效率为η2,则η1______η2(选填“等于”或“不等于”).
【答案】平衡螺母消除杠杆重力对平衡产生的影响在水平位置平衡竖直向上变大杠杆自重对杠杆平衡产生影响不等于
【解析】
【详解】
第一空.实验时,正确安装好杠杆后,调节平衡螺母使杠杆在水平位置平衡;
第二空.当杠杆在水平位置平衡时,杠杆还没有施加动力和阻力,所以一定不是便于测量力臂,而杠杆的重心在支点的正上方,此时重力的力臂为零,可以消除杠杆重力对平衡产生的影响;
第三空.实验过程中,在图甲所示的A位置挂上两个钩码,可在B位置用弹簧测力计竖直向下拉,使杠杆在水平位置重新平衡,记录数据;
第四空.将弹簧测力计作用在C点,则此时动力和阻力在支点的同一侧,二力方向相反,杠杆才能平衡,所以需竖直向上拉弹簧测力计使杠杆平衡,记录数据;
第五空.若不是竖直拉弹簧测力计,此时动力臂将变小,而阻力和阻力臂都不变,根据杠杆平衡条件F1l1=F2l2知,拉力将变大,即测力计示数将变大,再通过数据分析可得出杠杆的平衡条件。
第六空.利用图乙所示装置迸行拓展实验,由图知,此时支点在杠杆的一端,杠杆的重心不在支点上,杠杆的重力对杠杆平衡产生了影响,导致拉力比由杠杆平衡条件计算出来的数值偏大,所以实验结论与杠杆平衡条件不相符,即原因是杠杆自重对杠杆平衡产生影响;
第七空.相同的钩码,两次钩码升高的高度相等,所以两次有用功相等;将钩码由A点移到B点,要升高相同的高度,拉力提升的高度更大,即将杠杆提升的高度增加,额外功增大,因为总功等于额外功与有用功之和,因此第二次弹簧测力计做的总功大于第一次做的
总功,根据
W
W
η=有用
总
知,两次机械效率不等,即η1不等于η2。
14.李华利用生活中常见物品巧妙地测出一石块的密度,实验过程如下:
A.取一根筷子,用细线将其悬挂,调节悬挂位置,直至筷子水平平衡,悬挂位置记为O 点,如图甲所示;
B.将矿泉水瓶剪成烧杯形状,倾斜固定放置,在瓶中装水至溢水口处,用细线系紧石块,将石块缓慢浸入水中,溢出的水全部装入轻质塑料袋中,如图乙所示;
C.取出石块,擦干水分;将装水的塑料袋和石块分别挂于筷子上O点两侧,移动悬挂位置使筷子仍水平平衡,用刻度尺分别测出O点到两悬挂点的距离l1和l2,如图丙所示。
(1)已知水的密度为ρ水,则石块密度ρ石=_____(用字母ρ水和所测得的物理量表示);(2)采用上述实验方法,筷子粗细不均匀对实验结果____(选填“有”或“无”)影响;(3)图乙所示步骤中,若瓶中的水未装至溢水口,实验结果将_____(选填“偏大”、“偏小”或“不变”)。
【答案】1
2
l
lρ水无偏大
【解析】
【详解】
(1)图丙中,根据杠杆的平衡条件F1l1=F2l2可得:G水l1=G石l2,由于G=mg=ρVg可得:ρ水V水l1=ρ石V石l2;石块体积等于它排出水的体积,所以,V石=V水,则:ρ水l1=ρ石l2,所以,ρ石
=1
2
l
lρ水;
(2)由于实验时调节悬挂位置,直至筷子水平平衡,此时重力的作用线通过支点,支点到重力的作用线的距离为零,则消除筷子自身重对杠杆平衡的影响,所以筷子粗细不均匀对实验结果无影响;
(3)若瓶中的水未装至溢水口,则溢出的水的体积小于实际排开的水的体积,则溢出的水
的重力小于排开的水的重力,当在图丙实验时,l1变大,根ρ石=1
2
l
lρ水可知ρ石偏大。15.从地面上搬起重物我们的常见做法是弯腰(如图甲)或人下蹲弯曲膝盖(如图乙)把
它搬起来,哪种方法好呢?下面就建立模型说明这个问题。把脊柱简化为杠杆如图丙所示,脊柱可绕骶骨(轴)O 转动,腰背部复杂肌肉的等效拉力F1 作用在A 点,其实际作用方向与脊柱夹角为12°且保持不变,搬箱子拉力F2作用在肩关节B 点,在B 点挂一重物代替箱子。用测力计沿F1方向拉,使模型静止,可测出腰背部复杂肌肉拉力的大小。接着,改变脊柱与水平面的夹角即可改变杠杆与水平面的夹角α,多次实验得出结论.
(1)所谓物理模型,是人们为了研究物理问题方便和探讨物理事物本身而对研究对象所作的一种简化描述,是以观察和实验为基础,采用理想化的办法所创造的,能再现事物本质和内在特性的一种简化模型。下列选项中没有用到物理模型的是____________。
A.光线 B.卢瑟福提出的原子结构 C.磁场 D.光滑平面
(2)在丙图中画出F2力臂L2.
(_____)
(3)当α角增大时,L2______(选填“变大”“不变”或“变小”),F1_______(选填“变大”“不变”或“变小”)。
(4)如果考虑到人上半身的重力,那么腰背部肌肉的实际拉力将比丙图中F1 要_______(选填“大”或“小”)。
(5)对比甲、乙两种姿势所对应丙图中的两种状态,由以下分析可得,________(选填“甲”或“乙”)图中的姿势比较正确.
【答案】D变小变小大乙
【解析】
【详解】
(1)所谓物理模型,是以观察和实验为基础,采用理想化的办法所创造的,能再现事物本质和内在特性的一种简化模型。
用带箭头的直线表示光线是建立的物理模型;根据卢瑟福提出的原子结构特点构建了原子核的结构模型;人们用带箭头的曲线表示磁场的方向及分布特征,是物理模型;光滑平面只是一种理想化的假设,不是物理模型,故选D。
(1)力臂是支点到力的作用线的距离,所以延长F2作用线,由支点向作用线画垂线,如
图L2是其力臂:
(2)当α角增大时,支点到阻力F2的距离变小,即力臂L2变小;
拉力F1的方向与脊柱夹角始终为12°,故动力臂不变,阻力不变,则杠杆平衡条件可知,动力F1变小;
(3)如果考虑到人上半身的重力,由于上半身的重力是阻力的一部分,即阻力更大,根据杠杆平衡条件可知:实际拉力也将变大;
(4)甲、乙两种姿势可知:甲姿势α角小,由(2)分析知,需要的动力F1更大,而乙姿势α角大,需要的动力F1小一些,所以在搬起物体时,用甲姿势腰背部复杂肌肉的等效拉力F1要使用较大的力,容易千万损伤,则乙姿势正确。
2020-2021学年度九年级物理上册课时练习:第11章简单机 械和功第2节滑轮 学校:___________姓名:___________班级:___________考号:___________ 一、单选题 1.使用如图所示的装置提升同一个物体,(不计滑轮重和摩擦)最省力的装置是A.B.C.D. 2.如图所示,吊篮的重力为400N,动滑轮总重力为100N,定滑轮总重力为50N,人的重力为600N,人在吊篮里拉着绳子不动时人需用力() A.218N B.220N C.210N D.236N 3.如图所示的各种情况中,用同样大小的力F将重物匀速提升,若不计摩擦及绳与滑轮的重力,物重最大的是() A.B.C.D. 4.要利用滑轮组匀速提升重为1200N的物体,而绳子能承受的最大拉力为300N (不计滑轮自身重和摩擦),则所用滑轮中至少使用 A.一个定滑轮一个动滑轮B.一个定滑轮、两个动滑轮 C.两个定滑轮一个动滑轮D.两个定滑轮、两个动滑轮 5.利用两个滑轮提升同一重物,滑轮重、绳重、摩擦力均不计,下图的几种组合中,最省力的组合是
A.B.C.D. 6.如图所示,分别用力F1、F2、F3匀速提起物体A,不考虑摩擦,三个力的大小关系是() A.F1<F2<F3B.F1=F2=F3C.F1>F2>F3D.F2>F1=F3 7.学校旗杆顶端装有定滑轮,这样做 A.既省力,也改变力的方向 B.省力,但不改变力的方向 C.不省力,但改变力的方向 D.既不省力,也不改变力的方向 8.如图所示,物体M放在水平桌面上.现通过一动滑轮(质量和摩擦均不计)在绳子自由端施加一拉力F,拉着M向左做匀速直线运动,此时弹簧测力计(质量可忽略)示数为10 N.若在M上加放一物块m,要保持M向左继续做匀速直线运动,需在绕过动滑轮绳子的自由端施加一拉力F′,则 A.M运动时受到向左的摩擦力 B.加放m前,M受到20 N的摩擦力 C.加放m前,M受到10 N的摩擦力 D.加放m后,力F′保持10 N不变 9.如图所示,物体A所受的重力为98 N,滑轮所受的重力为2 N,当整个装置静止时,弹簧测力计的读数是22 N,不计绳重及滑轮摩擦,物体B所受的重力是
F θ M 地球 N 人大附中朝阳学校 2019~2020 学年度第二学期高一年级阶段性练 习 物理(选考)试题 2020 年 4 月 15 日 第 I 卷(共 39 分请将答案填涂在答题纸上) 一 、选择 题 (本题包 括 13 小题, 每小题 3 分 ,共 3 9 分 。 每.选项符合题意。) 1.下列物理量中,属于矢量的是( ) A .动能 B .功 C .周期 D .向心加速度 2.在物理学史上,利用右图所示的装置首先精确测量引力常量的科学家是( ) A .第谷 B .牛顿 C .开普勒 D .卡文迪许 3.下列所述的运动过程均不计空气阻力,其中机械能守恒的是( ) A .小石块被水平抛出后在空中运动的过程 B .木箱沿粗糙斜面匀速下滑的过程 C .人乘电梯加速上升的过程 D .子弹射穿木块的过程 4.如图所示,一物块在与水平方向成 θ 角的恒力 F 作用下,沿水平面向右运动一段距离 x 。则在此过程中,力 F 对物块所做的功为( ) A .Fx B .Fx sin θ C .Fx cos θ D .Fx tan θ 5.质量 10g 、以 0.80km/s 飞行的子弹与质量 62kg 、以 10m/s 奔跑的运动员相比( ) A .运动员的动能较大 B .子弹的动能较大 C .二者的动能一样大 D .无法比较它们的动能 6.如图所示,以 10 m/s 的水平初速度抛出的物体,飞行一段时间后,垂直地撞在倾角为 θ=30°的斜面上,g 取 10 m/s 2 这段飞行所用的时间为( ) 7.1970 年 4 月 24 日,我国自行设计、制造的第一颗人造地球卫星“东方红一号”发射成功,开创了我国航天事业的新 纪元。为了纪念中国航天事业的成就,发扬中国航天精神,2016 年 3 月 8 日,国务院批复同意自 2016 年起,将每年 4 月 24 日设立为“中国航天日”。已知“东方红一号”的运行轨道为椭圆轨道,其近地点 M 和远地点 N 的高度分别为 439km 和 2384km ,则( ) A .卫星在 M 点的势能大于在 N 点的势能 B .卫星在 M 点的速度小于在 N 点的速度 C .卫星在 M 点的角速度大于在 N 点的角速度 D .卫星在 M 点的加速度小于在 N 点的加速度 考 生 须 知 1.本试卷 分为Ⅰ满分为 100 分。 2.第Ⅰ卷各题均须用 2B 铅笔按规定要求在“机读答题纸”对应区域上作答,题号要对应, 填涂要规范。 3.请将个人信息完整填写在密封线内。 4.客观题用手机登陆网页,对应输入选项(题号选项要对应);主观题拍照,上传照片(拍照时务 必 保
“第十一章 简单机械和功”知识复习 一.本章知识网络 定义: 公式: 有用功: + 额外功: 总功 滑轮组中克服摩擦力、绳重、动滑轮重所做的功为额外功 定义: 单位:J 功率: 1、公式:W=FS 2、做功的必要条件: 机械效率 功 省力杠杆: 费力杠杆: 等臂杠杆: 1、公式:F 1L 1=F 2L 2 2、杠杆的分类: 1、特点: 2、组合: 3、省力情况: S=nh(s:绳子自由端移动的距离,n: 吊起动滑轮绳子的股数, h:动滑轮一端移动的距离) F=(1/n )G (忽略 时) F=(1/n)(G 物+G 动)(忽略 时) 滑轮组: 滑轮 实质:省力杠杆 特点:不能改变施力方向,但可以省力。 动滑轮: 1、实质:等臂杠杆 2、特点:不能省力但能改变施力方向 定滑轮: 1、 杠杆的定义: 2、 杠杆的5要素: 3、 杠杆的平衡条件: 杠杆 简单机械: 1、 表示物体做功快慢的物理量。 2、 定义:单位时间所做的功 3、 单位:瓦特、简称:瓦,符号:W 4、 公式:P=W/t 1、 提升物体时克服物体重力所做的功为有用功 即W 有用=Gh 2、 水平拉物体时克服摩擦力所做的功是有用功 即:W 额外=fs
二、知识点 一、杠杆 1、定义:在物理学中,将一根在的作用下可绕一固定点转动的硬棒称做杠杆 (很多物体可以抽象为硬棒)。 支点O:杠杆绕着转动的点(要求会找支点)。 动力:使杠杆转动的力(要求会根据动力臂画出动力的示意图)。 把支点和动力作用点的连线作为力臂时,该力臂最长,与该力臂垂直的力就是最小的力。 阻力:阻碍杠杆转动的力(要求会根据阻力臂画出阻力的示意图)。 动力臂:(要求会画力臂)。 阻力臂:(要求会画力臂)。 2、杠杆的平衡条件 ⑴什么是杠杆的平衡:杠杆处于静止状态。 ⑵本实验要求杠杆在静止时进行研究的原因:可以。 ⑶杠杆的平衡条件: (虽然是力×距离,但并没有功的意义,因为力臂并不是沿力的方向移动的距离) 3、杠杆的分类 ⑴省力杠杆(即动力小于阻力):因为 < ,所以 > 。省力杠杆可以,但,即动力作用点移动的距离比阻力作用点大。 例:羊角锤、道钉撬、老虎钳、开瓶扳手、板车、抽水机手柄、手术剪刀、铁皮剪刀 ⑵费力杠杆(即动力大于阻力):因为 > ,所以 < 。费力杠杆可以,但,即动力作用点移动的距离比阻力作用点小。 例:火钳、钓鱼杆、筷子、镊子、理发剪刀、铁锹、笤帚、起重机吊臂、肱二头肌、缝纫机蹋板⑶等臂杠杆(即既不省力也不费力):因为 = ,所以=。等臂杠杆既不省距离也不费距离。 例:天平、定滑轮 二、滑轮: 1、定滑轮:使用时轴的位置固定不动。 ①特点:。 ②实质:(不计摩擦与绳重,F G)。 ③F移动的距离和G移动的距离。即s h ④应用:旗杆顶端的定滑轮。 2、动滑轮:使用时轴的位置随被拉物体一起移动。 ①特点:。 ②实质:。 (不计摩擦和绳重,F= G总) G F G F . . O O
九上物理第十一章简单机械和功 功 一、填空题 1.从“探究斜面”实验我们看出:利用斜面提升重物可以省_______,但不能省_______.利用其他机械也可以得到类似的结论:省力的机械费_______.省距离的机械费______. 2.探究斜面,每次在小车上放不同数量的砝码,沿斜面方向匀速拉动小车,分别测出拉力的大小F、小车通过的距离s、小车及车上砝码所受重力G、上升的高度h并记录下来.分析、比较实验数据,从中能得到的结论是_______与_______近似相等. 3.力与物体在力的方向上通过距离的乘积是一个有意义的物理量,在物理学中称这一乘积为_______,简称______. 4.对物体做功的两个必要条件:一是_________;二是______. 5.(2010.河池)如图所示,是某大楼内电梯的结构示意图, 钢链的一端固定在A点,然后绕过电梯厢下的滑轮,另一端连 接在电动控制装置上.若用拉力F将重为2×104N的电梯和乘客 从一楼匀速提升到15m高的六楼,则拉力F的大小是_______ N,拉力F所做的功是_______J(不计摩擦和钢链自重). 6.在水平桌面上,将重为20N的木块沿直线匀速向前推了5m,所用的推力为4N,撤去推力后,木块由于惯性又前进了1m,则推力所做的功是_______J,重力所做的功为_______J. 7.甲、乙两物体在水平力的作用下做匀速直线运动,若甲的质量是乙的2倍,甲所受的水平力是乙的3倍,甲的速度是乙的4倍,那么在相同的时间内,水平力对甲、乙两物体做功之比为_______. 8.如图所示,重为20N的物体从斜面的顶端A滑下,若AC=3m,AB=5m,则物体从A端滑到B端时,重力对物体所做的功为_______J,支持力对物体做的功为_______J. 9.某商场二楼到三楼的自动扶梯高度是4m,扶梯长6m,孙琪同学体重500N.自动扶梯把孙琪同学从二楼运送到三楼的过程中对她做功_______J. 10.如图,某人通过定滑轮拉住重为98N的物体,当人拉绳子从A点慢慢移动到B点时,此人克服物体的重力大约做了_______J的功. 11.教学大楼每层楼高为3m,小明提着一重为50N的箱子,沿楼梯从一楼登上三楼,再沿三楼水平走廊走了4m进入教室,从一楼到教室过程中小明对箱做的总功为____. 12.如图所示,在水平拉力F作用下,使重40N的物体A匀速移动5m,物体A受到地面的摩擦力为5N,不计滑轮、绳子的重力及摩擦,拉力F做的功_______. 二、选择题 13.关于物体是否做功的说法中正确的是( ) A.起重机吊着钢筋水平匀速移动一段距离,起重机对钢筋做了功 B.被脚踢出的足球在草地上滚动的过程中,脚对足球做了功 C.小刚从地上捡起篮球的过程中,小刚对篮球做了功 D.小丽背着书包站在路边等车,小丽对书包做了功 14.一个足球运动员用100N的力踢一个重为5N的足球,球离脚后在水平草地上向前滚动了30m.在球滚动的过程中,运动员对足球做的功为( )
人大附中高一年级物理《机械能及其守恒定律》单元练习 说明:本练习共三道大题,18 道小题,共 4 页;满分 100 分,考试时间 70 分钟。 一、本题共 12 小题,在每小题给出的选项中,至少有一个选项是符合题意的(每小 题4 分,共 48 分。每小题全选对的得 4 分,选对但不全的得 2 分,只要有选错的该小题不得分) 1. 在下列实例中,不计空气阻力,机械能不守恒的是() A .做斜抛运动的手榴弹B.沿竖直方向自由下落的物体 C .起重机将重物匀速吊起D.沿光滑竖直圆轨道运动的小球 2.当重力对物体做正功时,物体的() A .重力势能一定增加,动能一定减小B.重力势能一定减小,动能一定增 加 C .重力势能不一定减小,动能一定增加 D .重力势能一定减小,动能不一定 增加 3.质量为 m 的物体沿着光滑斜面由静止开始下滑,斜面倾角为θ,当它在竖直方 向下降的高度为h 时,重力的瞬时功率为() A . mg 2gh B.mg 2gh cos C. mg 2ghsin D.mg 2gh sin 4.质量不等,但有相同初动能的两个物体,在动摩擦因数相同的水平面上滑动至 停止,则下列说法正确的是()v0 A .质量大的滑行距离大 B .质量小的滑行距离大 C .质量小的滑行时间短 D .它们克服摩擦力所做的功一样大
5.质量为 m的物体置于水平面上,在水平恒力 F 的作用下由静止开始前进了s 的距离,撤去力 F 后,物体又前进了s 的距离后停止运动。则下列说法正确的是 ( ) A .物体受到的摩擦阻力大小为 F/2 B.物体受到的摩擦阻力大小为 F C .运动过程中物体的最大速度为Fs D .物体运动到位移中点时的速度最大m 6.质量为 m的小球从桌面上以速度v竖直向上抛出,桌面离地高度为h,小球能达到的最大离地高度为 H。若以桌面作为重力势能的零参考平面,如图所示, 不计空气阻力,那么下列说法中正确的是 ( ) v A. 小球抛出时的机械能为mgh 1 mv2 H 2 h B. 小球在最高点的机械能为mgH C.小球在最高点的机械能为 1 mv2 2 D.小球落地时的机械能为mg(H-h) 7.将一物体以速度 v 从地面竖直上抛,取地面为零势能面,当物体运动到某高度 时,它的动 能恰为此时重力势能的一半,不计空气阻力,则这个高度为() A. v2 B. v2 C. v 2 D. v 2 g 2g 3g 4g 8.如图所示,小球在竖直向下的力 F 作用下,将竖直轻弹簧压缩。将力 F 撤去,小球 将向上弹起并离开弹簧,直到速度为零时为止,则小球在上 升过程中 ①小球的动能先增大后减小②小球在离开弹簧时动能 最大 ③小球动能最大时弹性势能为零④小球动能减为零时,重力势能最大
简单机械和功知识点归纳 第一部分、杠杆和滑轮 一、杠杆 1、杠杆的定义:一根在力的作用下能绕着固定点转动的硬棒就是杠杆。杠杆可以是直的硬棒,如撬棒等;也可以是弯的,如压井的把儿。 2、杠杆的五要素: 支点O:杠杆绕着转动的点。 动力F1: 使杠杆转动的力。 阻力F2:阻碍杠杆转动的力。 动力臂L1:从支点到动力作用线的距离。 阻力臂L2:从支点到阻力作用线的距离。 3、杠杆平衡:杠杆在力的作用下保持静止或匀速转动,杠杆就处于平衡状态。 杠杆的平衡条件是:动力×动力臂=阻力×阻力臂: F1L1= F2L2 注意:杠杆的平衡不是单独由力或力臂决定的,而是由它们的乘积来决定的。 能用杠杆的平衡条件解释、设计、解决有关问题,能进行简单计算。 4、杠杆分类: (1)省力杠杆:L1>L2,F1<F2。其动力臂L1大于阻力臂L2,平衡时动力F1小于阻力F2,即用较小的动力就可以克服较大的阻力。但是实际工作是动力移动的距离却比阻力移动的距离大,即要费距离。如撬起重物的撬棒,开启瓶盖的起子、铡草用的铡刀等,都属于这一类杠杆。 (2)费力杠杆:L1<L2,F1>F2。 这类杠杆的特点是动力臂L1小于阻力臂L2,平衡时动力F1大于阻力F2,即要用较大的动力才能克服阻力完成工作,但它的优点是杠杆工作时,动力移动较小的距离就能使阻力移动较大的距离。使工作方便,也就是省了距离。如缝纫机踏板、挖土的铁锨、大扫帚、夹煤块的火钳,这些杠杆都是费力杠杆。 (3)等臂杠杆:L1=L2,F1=F2。 这类杠杆的动力臂L1等于阻力臂L2,平衡时动力F1等于阻力F2,工作时既不省力也不费力,如天平、定滑轮就是等臂杠杆。 列表如下: 杠杆种类构造特点 应用举例优点缺点 省力杠杆L1>L2 省力费距离钳子、起子 费力杠杆L1<L2 省距离费力钓鱼杆、理发剪刀 等臂杠杆L1=L2 改变力的方向天平、翘翘板 注意:没有既省力、又省距离的杠杆。 二、定滑轮、动滑轮、滑轮组 5、定滑轮定义:轴固定不动的滑轮叫做定滑轮。特点:使用定滑轮不省力,但可以改变力的方向。 6、动滑轮定义:轴和物体一起移动的滑轮叫做动滑轮。特点:使用动滑轮可以省一半力,但不改变力的方向,且多移动一倍的距离。 7、滑轮组:由定滑轮和动滑轮组合而成的。特点:使用滑轮组会省力,可能会改变用力方向,一定费距离。 8、使用滑轮组时,重物和动滑轮由几段绳子承担,作用在绳子末端的拉力就是重物和动滑轮总重的几分之一,若动滑轮重不计,则F=G/n。
第十一章简单机械和功专题练习(解析版) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。请回答下列问题: (1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______; (2)小红在实验中测得一组数据如下表,于是他立即得出了杠杆的平衡条件: “F1×L1=F2×L2”,你认为是否合理,并说明理由:______; F1/N L1/cm F2/N L2/cm 2634 (3)某次实验如图所示,杠杆平衡,则以下生活中相关杠杆的应用与此图中杠杆类型相同的是______(选填“托盘天平”、“核桃夹”或“筷子”); (4)在上图中,保持弹簧测力计的位置及拉力的方向和钩码的个数不变,钩码向左移动,若要保持杠杆平衡,则钩码到支点的距离不应超过______cm。 【答案】便于直接测量力臂不合理,只有一组实验数据,得到的结论具有偶然性核桃夹 10cm 【解析】 【分析】 【详解】 (1)[1]在探究杠杆的平衡条件时,为了便于直接测量力臂,我们将杠杆调至水平位置平衡。 (2)[2]在探究杠杆的平衡条件时,我们需要进行多次实验得到多组实验数据是结论具有普遍性,实验中由一组实验数据得到的结论具有偶然性。 (3)[3]如图所示,弹簧测力计对杠杆施加拉力的力臂大于钩码对杠杆施加拉力的力臂,是一个省力杠杆;而托盘天平是一个等臂杠杆,核桃夹是一个省力杠杆,筷子夹菜时相当于一个费力杠杆;所以与此图中杠杆类型相同的是核桃夹。 (4)[4]杠杆上相邻刻度线间的距离都等于2cm,每个钩码重均为0.5N,则图中钩码的总重力为 0.5N63N G=?= 弹簧测力计施加拉力的力臂 L=?= 2cm36cm 右 钩码向左移动,若要保持杠杆平衡,弹簧测力计量程为5N,由杠杆平衡条件可知,钩码对杠杆施加拉力的最大力臂
第十一章《简单机械和功》同步练习(苏科版初三上) (11) 纲要检测 自主评估 基础与巩固 1 .将重为5N 和15N 的甲、乙两物体分不挂在杠杆的左、右两端,假设杠杆的重力忽略不计,当杠杆平稳时,左、右两力臂长之比为 〔 〕 A .3:1. B .2:1. C .1:3. D .4:1. 2.一杆刻度准确的杆秤,假设其秤砣上粘上一块重物,那么用它秤东西时,其读数 〔 〕 A .将比实际质量大. B .与实际质量相同. C .将比实际质量小. D .大小难以确定. 3.下面的实例中,相当于费劲、省距离的杠杆是 〔 〕 A .独轮推车. B .动滑轮. C .人的前臂. D .老虎钳. 4.用图11-29所示的滑轮组,将重为10N 的物体匀速提升0.1m ,拉力F =6N , 在这一过程中,以下讲法正确的选项是 一点、二力、二臂与作图 杠杆的平稳条件________________ 杠杆 省力杠杆_________ 杠杆的应用 费劲杠杆_________ 等臂杠杆_________ 特点_________________________ 实质_________________________ 特点_________________________ 实质_________________________ 滑轮组 ______________________________ 轮轴 _________________ 定滑轮 滑轮 动滑轮 简单机械 做功的两个必要因素___________________________ 功 功的运算 __________ 功的单位 __________ 内容:_____________________________ 应用:斜面 定义:_____________________________ 机械效率 表达式:__________ 测滑轮组的机械效率:器材、原理、步骤 定义与物理意义_____________________ 功率 表达式 __________________ 单位与换算 _____________ 功的原理 功 F
九年级第十一章简单机械和功(培优篇)(Word版含解析) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小军利用如图所示器材测定滑轮组的机械效率,他记录的实验数据如下表。 次数物重G/N 绳自由端的 拉力F/N 钩码上升的 高度h/cm 绳自由端移 动的距离 s/cm 机械效率η/% 1 1.00.51030 2 2.00.951574.1 (1)根据记录表格中提供的信息,组装图中小军使用的滑轮组______; (2)根据给出的实验数据,计算出第一次的机械效率并填入表格中______;(结果保留三位 有效数字) (3)同一个滑轮组,在两次实验过程中机械效率不同,主要原因是______。 【答案】 66.7 两次提升的物重不同 【解析】 【分析】 【详解】 (1)[1]当钩码上升的高度为10cm时,绳自由端移动的距离为30cm,则绳子承担重物的段数 30cm 3 10cm s n h === 绳子的段数是奇数,从动滑轮开始绕起,如图所示
(2)[2]第一次的机械效率 1 1 11 1 1N0.1m 100%100%100%66.7% 0.5N0.3m W G h W F s η ? =?=?=?≈ ? 有1有1 总 (3)[3]实验中两次测得的机械效率使用的是同一个滑轮组,即绳重、摩擦、滑轮重是相同的,所以导致机械效率不同主要原因是两次提升的物重不同。 2.小华探究杠杆平衡条件时,使用的每个钩码的质量均为100g,杠杆上相邻刻线间的距离相等。请按要求完成下列问题: (1)将杠杆安装在支架上,发现杠杆右端下沉,此时应将杠杆右侧的平衡螺母向______调(选填“左”或“右”),使杠杆在水平位置平衡。 (2)将杠杆调节水平平衡后,在杠杆上的B点悬挂了3个钩码,如图所示。为使杠杆保持水平平衡状态,应该在A点悬挂 ________个钩码。 (3)若撤掉杠杆A点的钩码,为使杠杆在水平位置平衡,应该用弹簧测力计在杠杆______(选填“A”或“C”)处竖直向上拉,当杠杆水平平衡时,弹簧测力计的示数为 _______N。(g取10N/kg) 【答案】左 2 C 1.5 【解析】 【分析】 【详解】 (1)[1]杠杆右端下沉,左端上翘,哪边高,平衡螺母像哪边调,所以应调节杠杆右侧的平衡螺母向左。 (2)[2]一个钩码重力 0.1kg10N/kg1N G mg ==?= 假设杠杆一小格为L,A点挂n个钩码,根据杠杆平衡条件有 1N331N2 n L L ??=?? 解得n=2,所以应该在A点悬挂2个钩码。
简单机械和功—杠杆 1.在______的作用下,能绕一_________转动的________叫做杠杆.杠杆可以是直的,也可以是_______的. 2.下列说法中正确的是() A.杠杆都是直的硬棒B.力臂是力的作用点到支点的距离 C.力臂是支点到力的作用线的距离D.杠杆的动力臂总是大于阻力臂 3.如图所示的杠杆中,动力的力臂用L表示,图中所画力臂正确的是() 4.在棉产区,每年秋天拔去地里的棉杆是农民的一项繁重体力劳动。王刚 仿照钳子的结构改制成一种农具解决了这一问题。如图所示,使用时, 将小铲着地,用虎口夹住棉杆的下部,然后在套管上用力,棉杆就拔出 来了。该农具整体视为杠杆,则支点、动力作用点、阻力作用点对应下列位置正确的是()A.转轴—虎口—套管B.小铲—套管—虎口 C.小铲—虎口—套管D.虎口—转轴—套管 5.如图所示,用一根硬棒撬一个大石块,棒的上端A是动力作用点.请在图上 标出:(1)当动力方向向上时,杠杆的支点a;(2)当动力方向向下时,杠杆的 支点b. 6.如图所示,杠杆OA处于平衡状态,在图中分别画出力F 1和F 2 对支点0的力臂L 1 和L 2 。. 7.在下图中画出力F 1、F 2 的力臂l1、l2。 第11章简单机械和功—杠杆随堂练习题二 1.杠杆的平衡条件是_________(用文字表示),写成数学表达式为________. 2.一杠杆受到的动力和阻力分别是6N和30N,当杠杆平衡时,动力臂与阻力臂之比是______________.3.若作用在杠杆上的动力是40N,动力臂是阻力臂的3倍,那么杠杆平衡时,阻力的大小为___________N.4.如图所示,一均匀杠杆A处挂2个钩码,B处挂1个钩码,杠杆恰好平衡,若钩码质量均为50g,在A. B两处再各加一个钩码,那么:() A.杠杆仍平衡B.杠杆左边向下倾
九年级物理第十一章简单机械和功(篇)(Word版含解析) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.在“探究杠杆平衡条件的实验”中: (1)图甲中,杠杆静止时处于_________(选填“平衡”或“不平衡”)状态.为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_______(选填“左”或“右”)移。(2)如图乙所示,在A 点挂 2 个重力均为 0.5N 的钩码,在B 点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为______________N。 (3)如图丙,保持A 点所挂砝码的数量和位置不变,将弹簧测力计绕B 点从a 位置转到b 位置,杠杆始终保持水平平衡,在此过程中拉力F 与其力臂的乘积变化情况是 ______________。 A.一直变小 B.一直变大 C.一直不变 D.先变小后变大 (4)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,拉力的力臂_________,弹簧测力计的示数__________(均选填“变大”、“变小”
或“不变”)。 (5)若要使图丁状态下的弹簧测力计读数减小,可将弹簧测力计绕B 点 _____(选填“顺时针”或“逆时针”)方向转动一个小角度。 (6)小华用如图戊装置进行探究,发现总是无法得到教材上所列出的杠杆平衡条件,其原因是_____________________________________。 (7)小明用如图戊所示的实验装置研究“杠杆的机械效率”.实验时,将总重为G 的钩码挂在杠杆A 处,竖直向上匀速拉动弹簧测力计,钩码上升的高度为h,弹簧测力计的示数为F,其移动的距离为s,则杠杆的机械效率η=__________(用题中字母表示)。若将钩码移动到B 点,仍将它匀速提升h 的高度,则此时弹簧测力计的示数F'________(选填 “>”“=”或“<”)F,杠杆此时的机械效率η′___________η(选择“>”、“=”或“<”)。 【答案】平衡左 1.5 C 变小不变顺时针杠杆自重对杠杆平衡有影响 Gh ×100% > > Fs 【解析】 【分析】 【详解】 (1)[1]杠杆处于静止状态或匀速转动状态都为杠杆的平衡状态;所以,图甲中实验前没挂钩码时,杠杆处于静止的平衡状态。 [2]由于杠杆左端上翘,调节时重心应向左移动,应将杠杆两端的平衡螺母向左移,使杠杆在水平位置平衡。 (2)[3]如图乙所示,在刻度线A处挂两个钩码,在刻度线B处用调好的弹簧测力计竖直向下拉杠杆,杠杆在水平位置时,每个钩码为G=0.5N,每小格为L,根据杠杆的平衡条件知道,即 2G×3L=F×2L 2×0.5N×3L=F×2L 解得F=1.5N (3)[4]将测力计绕B点从a位置转动到b位置过程中,钩码的重力不变,其力臂OA不变,即阻力与阻力臂的乘积不变;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条件知道,拉力F与其力臂的乘积也是不变的。 故选C。 (4)[5][6]力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丁所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以拉力大小不变。 (5)[7]根据杠杆平衡条件知道,要使弹簧测力计读数减小,在阻力和阻力臂不变时,需要增大动力臂,当弹簧测力计与杠杆垂直时,动力臂最长,拉力最小,所以需要将弹簧测力计顺时针转动。
厦门市双十中学物理第十一章简单机械和功同步单元检测(Word版含答案) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支架,弹簧测力计,刻度尺,细线和相同的重0.5 N重的钩码若干个。 (1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”或”右”)调节,直到杠杆在水平位置平衡; (2)在图B中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______(选填“左”或”右”)倾斜; (3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他做了如图C的实验,已知杠杆上每个小格长度为5 cm,每个钩码重0.5 N,当弹簧测力计斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×动力臂______(选填“等于”或“不等于”)阻力×阻力臂。实验C______(选填“能”或”不能”)说明甲同学结论是错误的。 【答案】右右等于能 【解析】 【分析】 【详解】 (1)[1]图A中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。 (2)[2]在图B中,据杠杆的平衡条件得 3G?2F=2G?3L 在左右两边同时增加一个相同的钩码,则左右两边分别变成 4G?2F,3G?3L 而 4G?2F<3G?3L 所以杠杆向右倾斜。 (3)[3][4]由图C知,此时 4×0.5N×3×0.5cm=3N×1 2 ×4×0.5cm 即:动力×动力臂=阻力×阻力臂。而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。 2.小军利用如图所示器材测定滑轮组的机械效率,他记录的实验数据如下表。
九年级第十一章简单机械和功单元测试卷附答案 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小军利用如图所示器材测定滑轮组的机械效率,他记录的实验数据如下表。 次数物重G /N 绳自由端的 拉力F/N 钩码上升的 高度h/cm 绳自由端移 动的距离 s/cm 机械效率η/% 1 1.00.51030 2 2.00.951574.1 (1)根据记录表格中提供的信息,组装图中小军使用的滑轮组______; (2)根据给出的实验数据,计算出第一次的机械效率并填入表格中______;(结果保留三位 有效数字) (3)同一个滑轮组,在两次实验过程中机械效率不同,主要原因是______。 【答案】 66.7 两次提升的物重不同 【解析】 【分析】 【详解】 (1)[1]当钩码上升的高度为10cm时,绳自由端移动的距离为30cm,则绳子承担重物的段数 30cm 3 10cm s n h === 绳子的段数是奇数,从动滑轮开始绕起,如图所示
(2)[2] 第一次的机械效率 1 1 11 1 1N0.1m 100%100%100%66.7% 0.5N0.3m W G h W F s η ? =?=?=?≈ ? 有1有1 总 (3)[3]实验中两次测得的机械效率使用的是同一个滑轮组,即绳重、摩擦、滑轮重是相同的,所以导致机械效率不同主要原因是两次提升的物重不同。 2.图甲是某型号的抽水马桶水箱进水控制装置的示意图,浮子是有上底无下底的圆柱形容器,中间有圆柱形的孔(图乙是浮子的放大示意图),壁的厚度忽略不计,浮子通过圆孔套在直杆上,并与调节螺母紧密相连,手动上下移动调节螺母,可以使浮子的位置随之上下移动,轻质细杆AB可绕O点旋转,A端与直杆底端相连,B端装有塞子当水箱的进水孔进水,水面接触到浮子下端后,浮子内的空?开始被封闭压缩,随着水位继续上升,浮子上升带动直杆向上运动,当水位上升到一定高度,AB杆处于水平位置时,塞子压住进水孔,进水孔停止进水。 (1)为测出浮子上底面的面积,现有刻度尺、量筒和水,请完成实验: ①将浮子倒置后,用刻度尺测出浮子内的深度h; ②将浮子装满水,用_______________________; ③浮子上底面的面积表达式:S上=_________(用所测量物理量的符号表示)。 (2)若浮子上升的过程中内部被封闭的空气不泄露,用上述方法测得的浮子上底面的面积为10cm2,外界大气压为1.0×105Pa,浮子、直杆、细杆AB、塞子的重力及所受浮力均不计,忽略所有摩擦,当进水孔停?进水时,浮子内的?体压强为外界大气压强的1.2倍, OA=6cm,OB=4cm,塞子受到水的压力为___________N。 (3)科学研究表明,?定质量的?体,在温度不变时,其压强与体积成反比,当进水孔的水压过大时,塞子被冲开,水箱内的水位超过?定?度,会使水溢出,若通过移动调节螺母的方法保证?桶正常使用,应如何移动调节螺母:__________。 【答案】量筒测出浮子里面水的体积V V h 30 适当向下移动 【解析】 【分析】
第十一章简单机械和功达标检测(Word版含解析) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小苗利用刻度均匀的轻质杠杆进行“探究杜杆的平衡条件”实验,已知纡个钩码重 0.5N。 (1)实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向__________(选填“左”或“右”)调节,直到杠杆在水平位置半衡。 (2)在图甲中的A点悬挂4个钩码,要使杠杆仍保持水平位置平衡,需在B点悬挂_______个钩码。 (3)如图乙所示,取走悬挂在B点的钩码,改用弾簧测力计在C点竖直向上拉,仍使杠杆在水平位置平衡,测力计的拉力为__________N;若在C点改变弹簧测力计拉力的方向,使之斜向右上方,杠杆仍然在水平位置平衡,则测力计的读数将__________(选填“变 大”“变小”或“不变”)。 【答案】右 3 1.5 变大 【解析】 【分析】 【详解】 (1)[1]杠杆在使用前左端下沉,说明左侧力与力臂的乘积大,应将平衡螺母向右调节。 (2)[2]设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:F A L A=F B L B,得 4G×3L=F B×4L 解得 F B=3G 即需在B点处挂3个钩码。 (3)[3]取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向上的拉力,根据杠杆的平衡条件:F A L A=F C L C,得 4G×3L=F C×4L 解得 F C=3G=3×0.5N=1.5N [4]如改变弹簧测力计拉力的方向,使之斜向右上方,阻力和阻力臂不变,动力臂减小,动力要增大,所以弹簧测力计示数变大,才能使杠杆仍然水平平衡。 2.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。请回答下列问题: (1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______;
九年级物理上册第十一章简单机械和功同步单元检测(Word版含答案) 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.如图,小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆,支架,弹簧测力计,刻度尺,细线和相同的重0.5 N重的钩码若干个。 (1)如图A所示,实验前,杠杆左侧下沉,则应将左端的平衡螺母向______(选填“左”或”右”)调节,直到杠杆在水平位置平衡; (2)在图B中杠杆平衡了,若在杠杆左右两边同时增加一个相同的钩码,则杠杆向______(选填“左”或”右”)倾斜; (3)甲同学通过对一组数据分析后得出的结论是:动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离,与小组同学交流后,乙同学为了证明甲同学的结论是错误的,他做了如图C的实验,已知杠杆上每个小格长度为5 cm,每个钩码重0.5 N,当弹簧测力计斜向上拉(与水平方向成30°角)杠杆,使杠杆在水平位置平衡,此时乙同学发现,动力×动力臂______(选填“等于”或“不等于”)阻力×阻力臂。实验C______(选填“能”或”不能”)说明甲同学结论是错误的。 【答案】右右等于能 【解析】 【分析】 【详解】 (1)[1]图A中,杠杆左侧下沉,应向右调节平衡螺母,直到杠杆在水平位置平衡。 (2)[2]在图B中,据杠杆的平衡条件得 3G?2F=2G?3L 在左右两边同时增加一个相同的钩码,则左右两边分别变成 4G?2F,3G?3L 而 4G?2F<3G?3L 所以杠杆向右倾斜。 (3)[3][4]由图C知,此时 4×0.5N×3×0.5cm=3N×1 2 ×4×0.5cm 即:动力×动力臂=阻力×阻力臂。而此时,动力臂并不等于支点到动力作用点的距离,所以能证明甲同学的结论是错误的。 2.在探究”杠杆平衡条件”的实验中:
人大附中2019-2020学年高一下学期4月选考 物理试题 1.下列物理量中,属于矢量的是() A.动能B.功C.周期D.向心加速度2.在物理学史上,利用图所示的装置首先精确测量引力常量的科学家是() A.第谷B.牛顿C.开普勒D.卡文迪许3.下列所述的运动过程均不计空气阻力,其中机械能守恒的是() A.小石块被水平抛出后在空中运动的过程 B.木箱沿粗糙斜面匀速下滑的过程 C.人乘电梯加速上升的过程 D.子弹射穿木块的过程 4.如图所示,一物块在与水平方向成θ角的拉力F的作用下,沿水平面向右运动一段距离s.则在此过程中,拉力F对物块所做的功为() A.Fs B.FssinθC.Fs cosθD.Fs tanθ 5.质量10g、以0.80km/s飞行的子弹与质量62kg、以10m/s奔跑的运动员相比()A.运动员的动能较大B.子弹的动能较大 C.二者的动能一样大D.无法比较它们的动能 6.如图所示,以10 m/s 的水平初速度抛出的物体,飞行一段时间后,垂直地撞在倾角为θ=30°的斜面上,g 取10 m/s2,这段飞行所用的时间为() s B s C D.2s A. 3 7.1970 年4 月24 日,我国自行设计、制造的第一颗人造地球卫星“东方红一号”发
射成功,开创了我国航天事业的新纪元。为了纪念中国航天事业的成就,发扬中国航天精神,2016 年3 月8 日,国务院批复同意自2016 年起,将每年4 月24 日设立为“中国航天日”。已知“东方红一号”的运行轨道为椭圆轨道,其近地点M 和远地点N 的高度分别为439km 和2384km,则() A.卫星在M 点的势能大于在N 点的势能 B.卫星在M 点的速度小于在N 点的速度 C.卫星在M 点的角速度大于在N 点的角速度 D.卫星在M 点的加速度小于在N 点的加速度 8.在降落伞沿竖直方向匀速下降的过程中,遇到水平方向吹来的风,则降落伞()A.下落的时间变短 B.下落的时间变长 C.落地时的速度变小 D.落地时的速度变大 9.如图所示,在匀速转动的圆筒内壁上紧靠着一个物体与圆筒一起运动,物体相对筒壁静止,则() A.物体受到3个力的作用 B.物体所受向心力是物体所受的重力提供的 C.物体所受向心力是物体所受的弹力提供的 D.物体所受向心力是物体所受的静摩擦力提供的 10.小球P和Q用不可伸长的轻绳挂在天花板上,P球的质量大于Q球的质量,悬挂P 球的绳比悬挂Q球的绳短。将两球拉起,使两球均被水平拉直,如图所示。将两球由静止释放,在各自轨迹的最低点() A.P球的速度一定大于Q球的速度 B.P球的动能一定大于Q球的动能 C.P球所受绳的拉力一定大于Q球所受绳的拉力 D.P球的向心加速度一定大于Q球的向心加速度 11.如图所示,倾角为30°、长度为10m的光滑斜面,一质量为1.2kg的物体从斜面顶端由静止开始下滑,g取10m/s2,则() A.整个过程中重力做功120J B.整个过程中重力做功的平均功率是30W C.整个过程中合外力做功120J
九年级物理上册第十一章简单机械和功单元测试卷附答案 一、初三物理第十一章简单机械和功易错压轴题提优(难) 1.小红在探究杠杆的平衡条件时,找来一个量程为5N的弹簧测力计和若干个重均为0.5N 的钩码,实验前测得杠杆上相邻刻度线间的距离都等于2cm。请回答下列问题: (1)实验前,小红先将杠杆调至水平位置平衡,这样操作的目的是______; (2)小红在实验中测得一组数据如下表,于是他立即得出了杠杆的平衡条件: “F1×L1=F2×L2”,你认为是否合理,并说明理由:______; F1/N L1/cm F2/N L2/cm 2634 (3)某次实验如图所示,杠杆平衡,则以下生活中相关杠杆的应用与此图中杠杆类型相同的是______(选填“托盘天平”、“核桃夹”或“筷子”); (4)在上图中,保持弹簧测力计的位置及拉力的方向和钩码的个数不变,钩码向左移动,若要保持杠杆平衡,则钩码到支点的距离不应超过______cm。 【答案】便于直接测量力臂不合理,只有一组实验数据,得到的结论具有偶然性核桃夹 10cm 【解析】 【分析】 【详解】 (1)[1]在探究杠杆的平衡条件时,为了便于直接测量力臂,我们将杠杆调至水平位置平衡。 (2)[2]在探究杠杆的平衡条件时,我们需要进行多次实验得到多组实验数据是结论具有普遍性,实验中由一组实验数据得到的结论具有偶然性。 (3)[3]如图所示,弹簧测力计对杠杆施加拉力的力臂大于钩码对杠杆施加拉力的力臂,是一个省力杠杆;而托盘天平是一个等臂杠杆,核桃夹是一个省力杠杆,筷子夹菜时相当于一个费力杠杆;所以与此图中杠杆类型相同的是核桃夹。 (4)[4]杠杆上相邻刻度线间的距离都等于2cm,每个钩码重均为0.5N,则图中钩码的总重力为 0.5N63N G=?= 弹簧测力计施加拉力的力臂 L=?= 2cm36cm 右 钩码向左移动,若要保持杠杆平衡,弹簧测力计量程为5N,由杠杆平衡条件可知,钩码对杠杆施加拉力的最大力臂
(苏科版)2020-2021学年度九年级物理上册课时练习:第11章简单机械和功第5节机械效率 学校:___________姓名:___________班级:___________考号:___________ 一、单选题 1.甲乙两机械,甲的机械效率是70%、乙的机械效率是50%,下列说法中正确的是()A.使用甲机械做功省力 B.甲机械做功快 C.相同时间内,甲机械完成的功多 D.乙机械的额外功在总功中占的比例大 2.用规格相同的滑轮安装成甲、乙两个滑轮组提升重物,如图所示。已知 G1=150N,G2=200N,动滑轮重G动=50N,滑轮与轴的摩擦忽略不计。设甲的机械效率为η1,乙的机械效率为η2,则下列关系正确的是() A.F1<F2,η1<η2B.F1>F2,η1>η2C.F1>F2,η1<η2D.F1<F2,η1>η2 3.小明用如图所示的甲、乙两个滑轮组,分别在相同时间内将同一重物匀速提升相同高度,每个滑轮的重均相等,不计绳重及摩擦,针对这一现象,小明得出了4个结论:①F1做的功等于F2做的功;②甲滑轮组的机械效率等于乙滑轮组的机械效率;③使用乙滑轮组比甲滑轮组更加省力;④F1做功的功率等于F2做功的功率;其中正确的为() A.①、②、③B.②、③、④C.①、③、④ D.①、②、③、④ 4.一台电动机的额定电压是220V,其电阻是2Ω.正常工作时,通过的电流为5A,忽
略各种摩擦,则电动机正常工作时将电能转化为机械能的效率约为( ) A .100% B .95% C .90% D .80% 5.如图所示的滑轮组中,动滑轮重1N ,小强用6N 的拉力F 通过该滑轮组匀速拉起重10N 的物体,物体沿竖直方向上升0.4m .此过程中,额外功和机械效率分别是( ) A .0.4J 83.3% B .0.8J 91.7% C .0.8J 83.3% D .0.4J 91.7% 6.工人用如图所示的动滑轮,将重1000N 的物体在5s 内匀速竖直提升了1m,人对绳自由端的拉力F 为600N,不计绳重和摩擦.以下结论正确的是( ) A .动滑轮的有用功为600J B .动滑轮的重力为400N C .动滑轮的机械效率为83.3% D .拉力F 的功率为120W 7.某实验小组利用图示装置研究杠杆的机械效率.保持O 点位置不变,竖直向上拉动弹簧测力计使重为G 的钩码缓慢匀速上升,在此过程中弹簧测力计的读数为F ,利用刻度尺分别测出C 、B 两点上升的高度为h 1、h 2 . 则下列说法正确的是 A .杠杆机械效率的表达式为21 Fh Gh B .杠杆机械效率的表达式为12 Gh Fh C .在如图水平位置拉升时F×OB=G× OA