目录
0 前言 (2)
1 测区概况 (2)
1.1 地理位置 (2)
1.2 地形条件 (2)
1.3 人文现状 (2)
1.4 测区交通 (3)
1.5 测区气候 (4)
2 布网原则和所依据的技术规范 (4)
2.1 布网原则和基本技术规范 (4)
2.2 布网步骤 (6)
2.3 平面控制网布设技术规范 (6)
3 造标埋石 (7)
3.1 造标过程 (7)
3.2 标石的埋设 (8)
4 测量依据、原则 (9)
5 平面控制测量 (10)
5.1 导线精度要求 (10)
5.2 水平角观测 (10)
5.3 水平角观测要求 (11)
5.4 距离测量规定 (12)
5.5 内业计算中数字取位 (12)
5.6 使用的仪器 (13)
6 高程控制测量 (14)
6.1 三、四等水准测量 (14)
6.2 DS1自动安平水准仪 (18)
7 课程设计心得 (20)
控制测量课程设计
0 前言
课程设计的主要目的,是通过学生亲自动手,把课本上的知识转化为实际的动手能力,加深学生对课本知识的认识和理解,加强学生的动手能力和动手意识以及提高学生的设计能力。
本次课程设计是针对下学期对紫山进行控制测量实习而做的。本课程设计主要阐述测区基本情况、平面控制测量技术规范、高程控制测量技术规范,为下学期顺利地进行控制测量实习做好相应的知识储备和准备。
1 测区概况
紫山,又名紫金山、马服山,系太行山余脉,面积约20平方公里,主峰海拔498.4米,是邯郸县的至高点,亦称邯郸第一山。在邯郸人的心目中,紫山是一座圣洁的神山,同时又是中华马氏的祖源地。
1.1 地理位置
紫山位于邯郸市邯郸县三陵乡陈窑村北100米处,距邯郸市内(以市博物馆为终点)20公里处,东径114°17′---114°22′,北纬36°40′—36°44′之间。
1.2 地形条件
测区地处山区,位于紫山的东南角。山的北面,座座山包似“群岫堆螺”;山的南面,丘岗起伏绵延数十里。独特的地质、地貌和地理位置,造就紫山是一个适宜实习的好地方。
1.3 人文现状
紫山的南边是陈窖村,北边是紫泉村,总人口达2300多人,耕地面积达2430亩。但是由于近年大批农民涌入县城,使得县城人口集中,在各小街小巷也分布着很多居民,反而农
村人口较少。但由于农村地比较多,造成很多村只有十几户人家,比较荒凉。如果进行测量实习,吃、住会比较困难。
1.4 测区交通
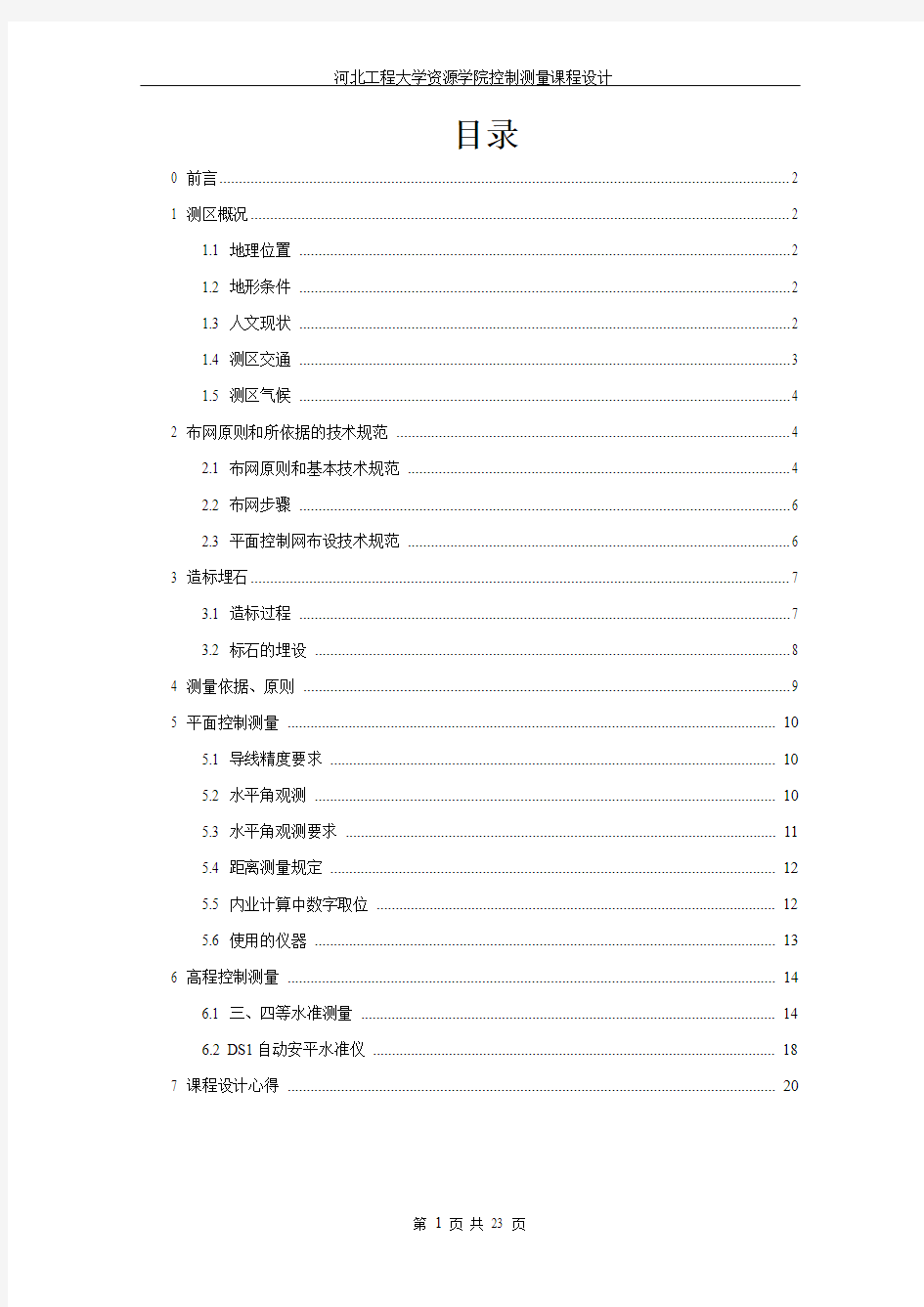
从邯郸市区出发沿着309国道,到达211省道与国道交汇处再沿着211省道北上1.4公里达到测区。测区地处山区与平原交接处,农村占很大比例,且大部分地区山路崎岖,通行不便。现附两张区位图:
图 1 紫山测区相对于市区的位置
图 2 测区相对于紫泉村和陈窖村的位置
1.5 测区气候
邯郸市位于河北省南部,属大陆性季风气候,年平均气温约为13℃,最低温度在1月,最高温度在7月,可达38℃。实习时间在开始于2014年二月末三月初,温度较低,可能有降雪,这给测量实习带来了一定的困难。
2 布网原则和所依据的技术规范
2.1 布网原则和基本技术规范
面向各种工程建设服务的工程控制网所控制的面积比国家大地测量要小(一般都小于2000Km2,本测区范围为5Km2左右),这就决定了它的布网原则既有和国家控制网相同之处,也有它自身的特点,它的布设一般也应考虑一下原则:
2.1.1 分级布网,逐级控制
对于布设紫山测区控制网,通常先布设精度要求最高的首级控制网,随后根据实际需要,
再加密若干级较低精度的控制网。本次实习是对工程测量的一个实践,而用于工程测量有其专用的控制网,往往分二级布设。第一级作总体控制,第二级直接为工程测量而布设;用于变形监测或其他专门用途的控制网,通常无需分级,直接布设成高精度的控制网即可。城市控制网或者工程GPS 网按相邻点的平均距离和精度划分为二、三、四等和一、二级,在布网时可以逐级布设、越级布设或布设同级全面网。
2.1.2 要有足够的精度
以工程测量控制网为例,一般要求最低一级控制网(四等网)的点位中误差能满足大比例尺1:500的测图要求。按图上±0.1mm 的绘制精度计算,这相当于地面上的点位精度为±(0.1×500)=±5cm 。对于国家控制网而言,尽管观测精度很高,但是由于边长比工程测量控制网长得多,待定点与起始点相距甚远,因而点位中误差远远大于工程测量控制网。
各等级城市或工程GPS 网的相邻点边长精度如下2-1式:
式中:σ------标准差,mm ; a------固定误差,mm ;
b------比例误差的系数,ppm ; d------相邻点间距离,km 。
2.1.3 要有足够的密度
无论是工程控制网或是专用控制网,都要求在测区内有足够多的控制点。众所周知,控制点的密度通常是用控制网的平均边长来表示的。《城市测量规范》中对于城市三角网平均边长及主要技术要求列于表2-1中。
表 2-1 边角组合网主要技术指标
等级
平均边长(km ) 测角中误差(″) 起始边长相对中误差
最弱边边长 相对中误差 二等
三等 四等
一级小三角 二级小三角 9
5 2 1 0.5
≤±1.0 ≤±1.8
≤±2.5
≤±5.0 ≤±10.0
≤1/300 000
≤1/200 000(首级) ≤1/120 000(加密) ≤1/120 000(首级) ≤1/80 000(加密) ≤1/40 000 ≤1/20 000
≤1/120 000 ≤1/80 000
≤1/45 000
≤1/20 000 ≤1/10 000
城市或工程GPS网的主要技术要求见表2-2,相邻点最小距离应为平均距离的1/2~1/3,最大距离应为平均距离的2~3倍。
表 2-2 城市GNSS平面控制网的主要技术指标
等级平均距离(km)a(mm)b(ppm)最弱边相对中误差
二等三等四等一级二级
9
5
2
1
<1
≤10
≤10
≤10
≤10
≤15
≤2
≤5
≤10
≤10
≤20
1/120 000
1/80 000
1/45 000
1/20 000
1/10 000
注:当边长小于200m时,边长中误差应小于20mm。
2.1.4 要有统一的规格
虽然工程控制网一般是由不同的工测部门独立施测的,但为了能够互相利用和协调,也应制定统一的规范,以便大家共同遵照执行。工程控制网的规范主要有《城市测量规范》、《工程测量规范》和《精密工程测量规范》等。1997年建设部颁发了行业标准《全球定位系统城市测量技术规程》,作为建立城市或工程GPS控制网的技术标准。
2.2 布网步骤
●在谷歌地球上展绘已知点;
●按上述对点位的基本要求,从已知点开始扩展;
●判断和检查点间的通视;
●利用平差易把谷歌地球上所选点的经纬度,进行高斯正算;
●估算控制网中各推算元素的精度;
●绘制误差椭圆;
●据测区的情况调查和图上设计结果,写出文字说明,并提交技术设计书。
2.3 平面控制网布设技术规范
以《城市测量规范》为例,它对控制网测设的主要技术要求都有具体的规定,其中三角网的主要技术要求见表2-1,电磁波测距导线的主要技术要求列于表2-3。
表2-3 电磁波测距导线测量法布设平面控制网主要技术指标
等级闭合环或附和导
线长度(km)
平均边长
(m)
测距中误差
(mm)
测角中误差
(″)
导线全长相对闭
合差
三等四等一级二级三级15
10
3.6
2.4
1.5
3 000
1 600
300
200
120
≤±18
≤±18
≤±15
≤±15
≤±15
≤±1.5
≤±2.5
≤±5
≤±8
≤±12
≤1/60 000
≤1/40 000
≤1/14 000
≤1/10 000
≤1/6 000
注:电磁波测距导线分为五个等级,其中三等、四等导线与三、四等三角网精度相当。
3 造标埋石
3.1 造标过程
测量觇标的作用是供观测照准和升高仪器之用,它的建造质量直接影响观测精度。另外每座觇标都要求保存一定的年限,以便布设低级网时使用,因而要求造得牢固、稳定端正。建造觇标是一项细致而繁重的工作,其实用技术应在实际作业中学习和掌握。下面就造标过程中应注意的问题,作一概略的介绍。
3.1.1 实地标定橹柱
通常采用透明纸标定坑位法,此法简单可靠,且不受通视条件的限制。
具体作法:取一张透明纸,在其中间部分任取一点O(如下图3),以O作为中心,每隔120°画方向线OA、OB、OC 这就代表三脚标的三个橹柱方向(如为四脚标则每隔90°画一条方向线)。考虑到橹柱的直径并保证视线距橹柱方向有一定的距离(国家规范中有规定),在三条方向线左右各划出10°的范围作为不通视区(图中的阴影部分)。
图3
首先在设计图上确定坑位方向。即将透明纸的中心与选点图上欲建标的三角点重合,转
动透明纸,使待测的三角点方向都落入通视区内,并选出最佳位置用量角器量出一个橹柱与某个能直接通视的邻点方向间的角度,此角度为56°30′。
实地标定坑位时,以该三角点定向。用经纬仪测出已知角(56°30′)即得橹柱的方向,再转120°、240°便得到橹柱、的方向。在标定的橹柱方向线上,量出三角点中心到橹柱坑中心的距离,就得到了橹柱基坑的位置。
3.1.2 挖基坑及浇灌坑底水平层
基坑深度约lm左右,底层应用混凝土浇灌抹平,并用水准仪操平,以保证基坑底面在同一水平面上。木质寻常标,可以不浇水平层,但要在基底填充石头砂子并夯实。
3.1.3 检查照准圆筒是否竖直及各方向是否通视
觇标竖起后应检查照准圆筒是否竖直,可用经纬仪在相隔90°的两个方向上进行。如不竖直,则要加以调整(为了调整的方便,标心柱先不要固定)。如标架不端正,则要调整基坑底的高度,圆筒位置校正完毕后,再用仪器检查各方向的通视情况,确认无问题后,再填土夯实,使橹柱固定。
3.1.4觇标的整饰和编号
上述工作全部完成后,最后整饰一下觇标的外观,并在橹柱的适当位置整齐的写上三角点点名、等级、编号及建造年月等。
3.2 标石的埋设
三角测量的标石中心是三角点的实际点位,通常所说的三角点坐标,就是指标石中心标志的坐标,所有三角测量的成果(坐标、距离、方位角)都是以标石中心为准的。因此,对于中心标石的任何损坏或位移,都将使三角测量成果失去作用或在很大程度上降低其精度。所以,中心标石埋设的质量,是衡量控制网质量的一项指标。
国家规范按三角网的等级及其地质条件将中心标石分成8种规格。
三、四等三角点的标石由两块组成(见下左图)。下面一块叫盘石,上面一块叫柱石,盘石和柱石一般用钢筋混凝土预制,然后运到实地埋设。预制时,应在柱石顶面印字注明埋设
单位及时间。标石也可用石料加工或用混凝土在现场浇制。
图 3 图 4
盘石和柱石中央埋有中心标志(见上右图4)。埋石时必须使盘石和柱石上的标志位于同一铅垂线上。埋设标石一般在造标工作完成后随即进行。埋设时,应使标石中心与觇标中心位于同一铅垂线上。
造标、埋石国家水准点标石的制作材料、规格和埋设要求,在《国家一、二等水准测量规范》(以下简称水准规范)中都有具体的规定和说明。关于工程测量中常用的普通水准标石是由柱石和盘石两部分组成,标石可用混凝土浇制或用天然岩石制成。水准标石上面嵌设有铜材或不锈钢金属标志。
埋设水准标石时,一定要将底部及周围的泥土夯实,标石埋设后,应绘制点之记,并办理托管手续。
4 测量依据、原则
●平面采用1980年西安坐标系,高程采用1975年国家高程基准。
●《全球定位系统(GPS)测量规范》(GB/T18314—2001)。
●《城市测量规范》(CJJ8—99)。
●《1:500、1:1000、1:2000地形图图式》。
●《三、四等水准测量规范》(GB12898-91)国家技术监督局颁布。
●《大比例尺地形图机助制图规范》(GB14912-94)国家技术监督局颁发。
●通过审批的本工程《技术设计书》。
5 平面控制测量
5.1 导线精度要求
导线控制网可布设成附合导线、闭合导线或导线网。各等级导线测量的主要技术要求应符合表5-1的规定。
表 5-1 导线测量的各项技术指标
等级测距相对
中误差
测角中误
差(″)
导线全长相
对闭合差
方位角闭
合差(″)
测回数
0.5″
级仪
器
1″
级仪
器
2″
级仪
器
6″
级仪
器
二等1/250000 1 1/100 000 ±2.0n 6 9 - - 三等1/150000 1.8 1/55000 ±3.6n 4 6 10 - 四等1/80000 2.5 1/40000 ±5n 3 4 6 - 一级1/40000 4 1/20000 ±8n- 2 2 - 二级1/15000 8 1/10000 ±16n- - 1 3 注:表中n为测站数,D为测距边长,以千米计。
导线相邻边长不宜相差过大,相邻边长之比不宜小于1:3。
5.2 水平角观测
采用测回观测法,具体测量方法如下:
I 安置仪器:在O点安置仪器,A、B设置目
标;
II 盘左(正镜)观测:
①瞄A,读数a左= 0°01′10″(假设值),
记入测回法观测手簿;
②顺时针转动照准部,瞄B,读数b左= 147°
12′30″(假设值),记入测回法观测手簿;
③计算上半测回的角值:
β左=b左- a左= 147°11′20″为上半测回值。
III 倒转望远镜,盘右(倒镜)观测:
①瞄B,读数b右=327°12′55″,记入测回法观测手簿;
②逆时针转动照准部,瞄A,读数a右= 180°01′50″,记入测回法观测手簿;
③计算下半测回角值:
β右= b右- a右= 147°11'05"为下半测回值。
IV 计算一测回的角值:
V 限差要求
①两个半测回水平角之间的差距,通常为40秒(根据测量等级而定);
②同一个方向所测的盘左和盘右的两个读数之间的差距(2C)和不同测回所测的2C互差。
5.3 水平角观测要求
●各测回间应均匀配置度盘,采用全站仪或电子经纬仪时可不受此限制。
●观测应在通视良好、成像清晰稳定时进行。
●观测过程中,气泡中心位置偏离值不得超过一格;四等以上的水平角观测,当观测方向
的垂直角超过±3o时,宜在测回间重新整置气泡位置。有垂直轴补偿器的仪器可不受此限制。
水平角观测误差超限时,应在原度盘位置上重测,并应符合下列规定:
①同方向测回间2c互差超限时,应重测超限方向,并联测零方向。
②下半测回归零差或零方向的2c互差超限时,应立即重测该测回。
③测回中重测的方向数超过方向总数的1/3时,该测回数据作废并重测。
④测站中重测的方向测回数超过总测回数的1/3时,该测站全部成果作废并重测。
水平角观测结束后,导线环(段)的测角中误差应按公式5-3式计算:
式中: m ——导线环(段)测角中误差(″); fβ——导线环(段)角度闭合差(″);
N ——导线环(段)个数; n ——导线环(段)测站数。
5.4 距离测量规定
距离测量的技术要求应符合表5-4的规定。
表 5-4 距离测量技术要求
等级使用测
距仪精
度等级
每边测回数
一测回读数较差限
值(mm)
测回间较差限值
(mm)往测返测
二等Ⅰ
4 4
2 3 Ⅱ 5 7
三等
Ⅰ 2 2 2 3
Ⅱ 4 4 5 7
四等Ⅰ
2 2
2 3 Ⅱ 5 7 Ⅲ 4 4 10 15
一级及以下Ⅰ
2 2
2 3 Ⅱ 5 7 Ⅲ10 15 Ⅳ 4 4 20 30
注:①一测回是指仪器照准目标一次、读数2~4次的过程。
②距离往返观测平距较差应小于2m D。
③测距边的斜距应进行气象改正和仪器常数改正。
5.5 内业计算中数字取位
内业计算中数字取位应符合表5-5的规定。
表 5-5 内业计算中数字取位要求
等级
观测方向值及
各项改正数(″)
边长观测值及各项
改正数(m)
边长与坐标
(m)
方位角(″)
二等0.01 0.0001 0.0001 0.01
三、四等,一
0.1 0.001 0.001 0.1
级
二级 1 0.001 0.001 1
5.6 使用的仪器
使用的仪器全站仪(测角2″,测边2mm+3ppm)
全站仪,即全站型电子测距仪(Electronic Total Station),是一种集光、机、电为一体的高技术测量仪器,是集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统。因其一次安置仪器就可完成该测站上全部测量工作,所以称之为全站仪。广泛用于地上大型建筑和地下隧道施工等精密工程测量或变形监测领域。
5.6.1 全站仪简介
全站仪是一种集光、机、电为一体的新型测角测距仪器,与光学经纬仪比较电子经纬仪将光学度盘换为光电扫描度盘,将人工光学测微读数代之以自动记录和显示读数,使测角操作简单化,且可避免读数误差的产生。电子经纬仪的自动记录、储存、计算功能,以及数据通讯功能,进一步提高了测量作业的自动化程度。
全站仪与光学经纬仪区别在于度盘读数及显示系统,电子经纬仪的水平度盘和竖直度盘及其读数装置是分别采用(编码盘)或两个相同的光栅度盘和读数传感器进行角度测量的。根据测角精度可分为0.5″,1″,2″,3″,5″,10″等几个等级。
5.6.2 全站仪使用方法
I 水平角测量
①按角度测量键,使全站仪处于角度测量模式,照准第一个目标A。
②设置A方向的水平度盘读数为0°00′00〃。
③照准第二个目标B,此时显示的水平度盘读数即为两方向间的水平夹角。
II 距离测量
①设置棱镜常数
测距前须将棱镜常数输入仪器中,仪器会自动对所测距离进行改正。
②设置大气改正值或气温、气压值
光在大气中的传播速度会随大气的温度和气压而变化,15℃和760mmHg是仪器设置的一个标准值,此时的大气改正为0ppm。实测时,可输入温度和气压值,全站仪会自动计算大气改正值(也可直接输入大气改正值),并对测距结果进行改正。
③量仪器高、棱镜高并输入全站仪。
④距离测量
照准目标棱镜中心,按测距键,距离测量开始,测距完成时显示斜距、平距、高差。
全站仪的测距模式有精测模式、跟踪模式、粗测模式三种。精测模式是最常用的测距模式,测量时间约 2.5S,最小显示单位1mm;跟踪模式,常用于跟踪移动目标或放样时连续测距,最小显示一般为1cm,每次测距时间约0.3S;粗测模式,测量时间约0.7S,最小显示单位1cm或1mm。在距离测量或坐标测量时,可按测距模式(MODE)键选择不同的测距模式。
应注意,有些型号的全站仪在距离测量时不能设定仪器高和棱镜高,显示的高差值是全站仪横轴中心与棱镜中心的高差。
III 坐标测量
①设定测站点的三维坐标。
②设定后视点的坐标或设定后视方向的水平度盘读数为其方位角。当设定后视点的坐标时,全站仪会自动计算后视方向的方位角,并设定后视方向的水平度盘读数为其方位角。
③设置棱镜常数。
④设置大气改正值或气温、气压值。
⑤量仪器高、棱镜高并输入全站仪。
⑥照准目标棱镜,按坐标测量键,全站仪开始测距并计算显示测点的三维坐标。
注:本次控制测量实习采用的是2″全站仪。
本次实习水平角观测值记录手簿见附表1。
6 高程控制测量
6.1 三、四等水准测量
I 观测方法
①三等水准测量采用中丝读数法进行往返测。当使用有光学测微器的水准仪和线条式因
瓦水准标尺观测时,也可进行单程双转点观测。
②四等水准测量采用中丝读数法进行单程观测。支线必须往返测或单程双转点观测。
II 设置测站要求
三、四等水准测量采用尺台作转点尺承。观测应在标尺分划线成像清晰稳定时进行,若成像欠佳,应酌情缩短视线长度。测站的视线长度、视线高度等按表6-1规定执行。
表 6-1
等级
视线长度前后视距差
(m)
每站的前后
视距累积差(m)
视线高度(m)仪器类型视距
三等DS3 ≤75
≤2.0 ≤5.0 三丝能读数DS1,DS05 ≤100
四等DS3 ≤100
≤3.0 ≤10.0 三丝能读数DS1, DS 05 ≤150
注:本次紫山控制测量实习采用的仪器是DS1自动安平水准仪。
III 测站观测程序和方法
①三等水准测量每测站照准标尺分划顺序为:
1)后视标尺黑面(基本分划);
2)前视标尺黑面(基本分划);
3)前视标尺红面(辅助分划);
4)后视标尺红面(辅助分划)。
②四等水准测量每测站照准标尺分划顺序为:
1)后视标尺黑面(基本分划);
2)后视标尺红面(辅助分划);
3)前视标尺黑面(基本分划);
4)前视标尺红面(辅助分划)。
③一测站的操作程序:
1)首先整置仪器竖轴至垂直位置(望远镜绕竖轴旋转时,水准气泡两端分离不大于1cm);2)远镜对准后视尺黑面,用倾斜螺旋导水准气泡准确居中,按视距丝和中丝精确读定标尺读数(四等观测可不读上、下丝读数,直接读距离);
3)照准前视尺黑面,按2)款操作;
4)照准前视尺红面,按2)款操作,此时只读中丝读数;
5)照准后视尺红面,按4)款操作。
使用单排分划的因瓦标尺观测时,对单排分划进行两次照准读数,代替基辅分划读数。
④自动安平水准仪的操作程序与气泡式水准仪相同。每测站观测前,首先将概略整平水准气泡导至中央,然后按规定顺序照准标尺进行读数。转镜水准仪的操作程序,应按规定顺序照准标尺,而将黑面和红面分划的观测分别在两个镜位(或摆位)进行。
⑤三、四等水准测量,采用单程双转点法观测时,在每一转点处,安置左右相距0.5m的两个尺台,相应于左右两条水准路线。每一测站按规定的方法和操作程序,首先完成右路线的观测,而后进行左路线的观测。
IV 间歇与检测
①观测间歇时,最好在水准点上结束。否则,应选择两个坚稳可靠、光滑突出、便于放置标尺的固定点,作为间歇点。间歇后,应进行检测,检测结果符合限差要求,即可由此起测。如无固定点可选择,则间歇前应对最后两测站的转点处打入带有帽钉的木桩作为间歇点。间歇后进行检测,比较任意两转点间歇前后所测高差,若符合限差要求,即可由此起测。否则,则须从前一水准点起测。
②检测成果应保留,但计算高差时不采用。
V 读数位数与测站观测限差
①读数取位按表6-2规定执行。
表6-2
等级
中丝读数法(mm) 光学测微法(mm)
视距丝中丝视距丝平分丝
三等 1 1 1 0.1 四等 1 1 1 1
②测站观测限差按表6-3规定执行。
表6-3
等级观测
方法
基、辅分划
(黑红面)
读数的差(mm)
基辅分划
(黑红面)
所测高差
的差(mm)
单程双转点法观
测时,左右路线
转点差(mm)
检测间歇点高
差的差(mm)
三等
中丝
读数法
2.0
3.0 —— 3.0
光学
测微法
1.0 1.5 1.5
四等
中丝
读数法
3.0 5.0
4.0
5.0
测站观测误差超限,在本站发现后可立即重测,若迁站后才发现,则应从水准点或间歇点(须经检测符合限差)起始,重新观测。
VI 观测中应遵守的事项
①观测时,须用白色测伞遮蔽阳光;迁站时,应罩以白色仪器罩。
②对具有倾斜螺旋的水准仪,观测前应测出倾斜螺旋的置平零点,并作标记,随着气温变化,应随时调整零点位置。对于自动安平水准仪的圆水准器,观测前须严格置平。
③在连续各测站上安置水准仪的三脚架时,应使其中两脚架与水准路线的方向平行,而第三脚轮换置于路线方向的左侧与右侧。
④除路线转弯处外,每一测站上仪器与前后标尺的三个位置,应接近一条直线。
⑤同一测站上观测时,一般不得两次调焦。仅当视线长度小于10m,且前后视距差小于1m时,可在观测前后标尺时调整焦距。
⑥每一测段的往测和返测,其站数均应为偶数。由往测转向返测时,两支标尺须互换位置,并应重新整置仪器。
⑦在高差甚大的地区,应尽可能使用因瓦水准尺按光学测微法实测。
VII 往返测高差不符值与环线闭合差的限差
表6-4
等级测段、路线往返
测高差不符值
(mm)
测段、路线的左
右路线高差不符
值(mm)
附合路线或
环线闭合差(mm)
检测已测测
段高差之差
(mm)
平原山区
三等±12K±8K±12L±15L±20R
四等±20K±14K±20L±25L±30R
注:K——路线或测段的长度,km;
L——附合路线(环线)长度,km;
R——检测测段长度,km。
山区指高程超过1000m或路线中最大高差超过400m的地区。
①检测已测测段高差之差的限差,对单程或双程检测均适用。
②水准环线由不同等级路线构成时,环线闭合差的限差,应按各等级路线长度分别计算,然后取其平方和的平方根为限差。
6.2 DS1自动安平水准仪
6.2.1 仪器简介
自动安平水准仪(automatic level)是指在一定的竖轴倾斜范围内,利用补偿器自动获取视线水平时水准标尺读数的水准仪。是用自动安平补偿器代替管状水准器,在仪器微倾时补偿器受重力作用而相对于望远镜筒移动,使视线水平时标尺上的正确读数通过补偿器后仍旧落在水平十字丝上。自动安平的补偿可通过悬吊卜字丝,调在焦镜筒至十字丝之间的光路中安置一个补偿器,和在常规水准仪的物镜前安装单独的补偿附件等3个途径实现。用此类水准仪观测时,当圆水准器气泡居中仪器放平之后,不需再经手工调整即可读得视线水平时的读数。它可简化操作手续,提高作业速度,以减少外界条件变化所引起的观测误差。
6.2.2 操作方法
I 粗略整平
粗略整平是借助圆水准器的气泡居中,使仪器竖轴大致铅直,从而视准轴粗略水平。如图6-2(a)所示,气泡未居中而位于a处;则先按箭头所指方向,用双手相对转动脚螺旋①和②,使气泡移动到b的位置(图6-2(b));再左手转动脚螺旋③,即可使气泡居中。在整平的过程中,气泡移动的方向与左手大拇指运动的方向一致。
(a) 两个脚螺旋转动方向 (b) 第三个脚螺旋转动方向
图6-2 概略整平方法
II 瞄准水准尺
①将望远镜对着明亮的背景,转动目镜螺旋,使十字丝清晰;
② 松开制动螺旋,转动望远镜,采用望远镜镜筒上面的照门和准星瞄准水准尺,然后拧紧制动螺旋;
③ 从望远镜中观察,转动物镜螺旋进行对光,使目标清晰,再转动微动螺旋,使竖丝对准水准尺;
④ 眼睛在目镜端上下微微移动,若十字丝与目标影响有相对移动,则应重新仔细地进行物镜对光,直到读数不变为止。 III 精平
眼睛通过位于目镜左方的符合气泡观察窗看水准管气泡,右手转动微倾螺旋,使气泡两端的像吻合,即表示水准仪的视准轴已精确水平。 IV 读数
观察十字丝的中丝在水准尺上的分划位置,读取读数。
6.2.3 闭合或附合水准路线测量
①选定一条闭合或附合水准路线,长度以安置4~6个测站为宜,确定起始点及水准路线的前进方向;
②在起始点和第一个待定点分别立水准尺,在距该两点大致等距处安置仪器,按照粗略整平、瞄准水准尺、精平与读数的操作流程,分别观测后视读数和前视读数,计算高差1h ,然后将仪器搬至第1和第2点的中间设站观测,得到2h ,依次推进测出3h 、4h 、…;
③根据已知点高程及各观测站的观测高差,计算水准路线的高差闭合差,并检查是否超限,如果超限,则应重新观测;如没有超限,则对闭合差进行分配,进而推算出各待测点的高程。
6.2.4 注意事项
①立尺时应站在水准尺后面,双手扶尺,使尺身保持竖直; ②前后视距可先由步数概量,使前、后视距大致相等; ③读取读数前,应仔细对光以消除视差;
④观测过程中不应进行粗平,若圆水准器气泡发生偏离,应整平仪器后重新观测;每次读数时都应进行精平;
⑤测量完毕后,应立刻检核,一旦误差超限,应立即重测。
水准测量记录手簿见附表2。
7 课程设计心得
这是我第一次接触课程设计,是一次将所学到的知识整合到设计书中的过程。在为期4天的设计中,我遇到了许多困难,不过经过我认真的研究和咨询张老师,都基本解决了。我知道,这次设计成果虽然有许多错误,但是我会在寒假期间认认真真地把控制测量全过程研究一遍,然后在紫山实习前把实习指导编写出来,认真地准备着下学期的实习。
17号楼 23号楼 16号楼12号楼 15号楼11号楼14号楼10号楼13号楼9号楼篮球场乒乓球场排球场 轮滑场 网球场 图书馆 C区 A区B区 花园 第一食堂 8号楼 7号楼 小 广 场 6号楼 5号楼车棚 西门 足 球 场 第五 教学 楼迎宾苑 小树林 荷 花 池 风 雨 操 场 大学生艺 术团活动 中心 大学生 活动 中心 商贸公司 后勤公 司 校医院 招待所 超市 大学生 超市 3号宿舍楼 第二食堂 水房 车棚 1号宿舍楼 第六食堂 回民 食堂 综合阅览室 学 府 食 苑 草地 第一行政办公楼 小广场 外国语学院 第二 阶梯 教室 第一 阶梯 教室 花 园 第一 第一 苗圃 办公区 第二教学办公楼 车 队 经 贸 商 店 家 属 区 第 三 食 堂4号楼 石家庄市第二中学 (分校) 旧 足 球 场 旧 篮 球 场 艺术学院 旅游学院 旧 篮 球 场 第四办公楼 第二教学楼 绿地 第一教学楼 第三教学办公楼 实验楼门球场 礼堂 家 属 区 家 属 区 秀林苑芳草地小市场 东门 正门 韶华路 华 青教楼 路春 光华路 图书馆升旗广场礼堂树林 荷 塘 路 桐 荫 路 塑 胶 操 场 后勤 公司 校医院 书 苑 路 2号宿舍楼 大学生 超市 第二食堂 水房 青教楼 师 林 路 1号宿舍楼 第六食堂 学 府 食 苑 草地 第一行政办公楼 ) 绿地 第一教学楼 升旗广场 晨 光 路 外国语学院 三 阶梯 教室 四 阶梯 教室 苗圃 第二行政办公楼 第三行政办公楼 门球场 树林 河北经贸大学地图(本部) 第四行政办公楼 旧图书馆 北 学 林 路 第三教学楼 招 待 所 19号 超 市 电 信 18号楼 麦 尔 琪20号楼 21号楼 22号楼 浴池 手机超市 江雪眼镜 水房
统计过程控制(SPC 课程培训测试题 部门:___________ 姓名:______________________ 分数:__________________ 一、名词解释: 1变差:过程的单个输出之间不可避免的差别;变差的原因可分为两类:普通原因和特殊原因。 3.1固有变差:仅由普通原因造成的过程变差,由? = R/d 2来估计。 3.2总变差:由普通原因和特殊原因共同造成的变差,用?S来估计。 2、特殊特性:可能影响安全性或法规的符合性、配合、功能、性能或产品后续生产过程 的产品特性或制造过程参数。 3、标准差:过程输出的分布宽度或从过程中统计抽样值(例如:子组均值)的分布宽度的 量度,用希腊字母或字母s(用于样本标准差)表示。 4、控制限:控制图上的一条线(或几条线),作为制定一个过程是否稳定的基础。如有超 出了控制极限变差存在,则证明过程受特殊因素的影响。控制限是通过过程数据 计算出来的,不要与工程的技术规范相混淆。 5、过程能力:一个稳定过程的固有变差(6? : R/d2 )的总范围。 6、C pk (稳定过程的能力指数):为一稳定过程【某一天、某一班次、某一批、某一机台 其组內的变差(R-bar/d2 or S-bar / C4 )】下的“能力指数”,计算时须同 时考虑过程数的趋势及该趋势接近于规格界限的程度。即:通常定义为CPU 或CPL中的最小值。 7、P pk(性能指数,即初期过程的性能指数):为试生产阶段一项类似于Cpk的能力指数, 某一产品长期监控下的“能力指数”;但本项指数的计算,是以新产品的初期过程 性能研究所得的数据为基础。即:通常定义为PPU或PPL中的最小值。 8 PPM(质量水准,即每百万零件不合格数):指一种根据实际的有缺陷材料来反映过程能力 的一种方法。PPM数据常用来优先制定纠正措施。
实习时间:2013年4月21日至25日 实习地点:主校区第二餐厅 组别:资源学院勘查3班第四组 指导教师:张晓楠 组长:李金波 组员:李强、甄正强、卢抗、弥中宇 组员分工: 选点与跑尺: 测量与读数: 记录与计算: 描点与绘图: 一实习目的与要求 工程测量实习是测量学必不可少的部分,我们学习不仅仅学习课本的理论知识,更要学习和培养我们的动手操作能力和对课本理论知识的深入理解总结,以及体会测量思想“从控制到碎部,从整体到局部,步步检核”等原则对工程测量的重要意义。在实际测量中我们要获得工作的初步经验和基本技能,进一步掌握测量仪器的操作方法,提高计算和绘图能力,对测绘小区域大比例尺地形图的全过程有一个全面的系统认识,会认识地形图。 学生通过本次实习应该达到以下要求: 1 掌握经纬仪,水准仪,视距尺,等测量仪器的操作方法;
2 掌握地形测图的基本方法,能够具有初步测绘小区域大比例尺地形图的工作能力; 3 能够根据给定的地形图在实际中寻找图上的点; 4在实习中增强独立工作能力和团队意识,为今后解决工作中的测量问题打下件事基础。 二实习任务及内容 小区域大比例尺地形图的测绘 1 测区:河北工程大学主校二餐 2 任务:通过五天的地形图测绘实习,测量c1、c2、c3、c4以及碎部点的数据,并根据得到的数据完成一幅比例尺1:500的图,图幅尺寸500mm*500mm 3 内容: (1)校正仪器(经纬仪、水准仪),工具及用品的准备(测量记录手簿、绘图铅笔、半圆仪、图板等) (2)按照是测绘更加方便、有效、快捷的原则,根据测区位置,在图板上布设控制点 控制测量的外业测量 (一)闭合导线控制测量外业观测 过程:1、踏勘选点:根据实习任务要求,从已知点控制点c1出发,逆时针沿闭合导线c1-c2-c3-c4-c1依次测量c1与c2的高差,c2与c3的高差,c3与c4的高差,c4与c1的高差,其间利用变更仪器高法检核,变更高度大于10cm。
过程控制期末试题及 其答案
1.控制系统对检测变送的基本要求是___准确___、__迅速__和可靠 2.从理论上讲,干扰通道存在纯滞后不影响系统的控制质量。 3.离心泵的控制方案有直流节流法、改变泵的转速n 改变旁路回流量。效 率最差的是改变旁路回流量。 4.随着控制通道的增益K o的增加,控制作用___增强_______,克服干扰能 力___最大______,最大偏差_____减小_____系统的余差减小 5.控制器的选择包括结构材质的选择、口径的选择、流量特性的选择和正 反作用的选择。 6.防积分饱和的措施有对控制器的输出限幅、限制控制器积分部分的输出 和积分切除法。 7.如果对象扰动通道增益K f增加,扰动作用__增强__,系统的余差__增大__,最 大偏差_增大___。 8.简单控制系统的组成,各部位的作用是什么? 解答: 简单控制系统由检测变送装置、控制器、执行器及被控对象组成。 检测变送装置的作用是检测被控变量的数值并将其转换为一种特定输出信号。 控制器的作用是接受检测装置送来的信号,与给定值相比较得出偏差,并按某种运算规律算出结果送往执行器。 执行器能自动地根据控制器送来的控制信号来改变操纵变量的数值,以达到控制被控变量的目的。 被控对象是指需要控制其工艺参数的生产设备或装置
9.气动执行器由__调节__机构和执行机构两部分组成,常用的辅助装置有 __阀门__定位器和手轮机构。 10.调节系统中调节器正反作用的确定依据是保证控制系统成为负反馈。 11.被控变量是指工艺要求以一定的精度保持__恒定 _或随某一参数的变化而 变化的参数。 12.反应对象特性的参数有放大倍数、时间常数、和纯滞后时间。 13.自动调节系统常用参数整定方法有哪些?常用的参数整定方法有!经验法*衰 减曲线法*临界比例度法*反应曲线法) 动态特性参数法,稳定边界法,衰减曲线法,经验法。 14.检测变送环节对控制系统的影响主要集中在检测元件的滞后和信号传递 的滞后问题上。 15.什么是对象数学模型,获取模型的方法有哪些? 答:对对象特性的数学描述就叫数学模型。 机理建模和实验建模系统辨识与参数估计。解析法)和(实验辨识法) 机理建模:由一般到特殊的推理演绎方法,对已知结构、参数的物理系统运用相应的物理定律或定理,根据对象或生产过程的内部机理,经过合理的分析简化而建立起描述系统各物理量动静态性能的数学模型。 实验建模步骤:1确定输入变量与输出变量信号;2测试;3对数据进行回归分析。 16.简述被控量与操纵量的选择原则。. 答:一、(1) 被控量的选择原则: ①必须尽可能选择表征生产过程的质量指标作为被控变量;
河北工程大学 本科毕业设计(论文)开题报告 题目:对献县凤翔园小区5,6号楼的施工测量 学生姓名: 专业:测绘工程 班级学号:120510210 指导老师: 开题时间: 2016年3 月22 日
一、选题的目的及意义: 首先,作为一个总结性环节,毕业设计是我们全面系统地掌握所学理论知识和专业技能并运用于解决实际问题的过程。通过这个环节,可以加深我们对所学基本理论知识的理解,培养我们综合分析和处理问题的能力以及设计创新精神。通过毕业设计的完成,使我们对四年所学的理论知识得到一次系统的总结。主要目的在于培养综合运用所学知识技能,理论联系实际,独立分析,解决实际问题的能力,使自己得到从事本专业工作和进行相关的基本训练。 近年来,高层建筑随着我国经济的发展而迅速发展,层数增多,高度加大,体 型日趋复杂.在施工测量中,无论对结构平面的竖向传递或是高程传递,其传递次数均大量增加。对施工测量提出了更高的要求,以保证达到结构施工精度的要求。施工测量是高层建筑施工的关键性工作,贯穿整个施工过程。施工测量的准确与否决定了高层建筑的整体垂直度和结构可靠性,因此在高层建筑施工中,施工测量尤为重要。 二、国内外研究现状: 近年来,高层建筑随着我国经济的发展而迅速发展,层数增多,高度加大,体型日趋复杂.在施工测量中,无论对结构平面的竖向传递或是高程传递,其传递次数均大量增加。对施工测量提出了更高的要求,以保证达到结构施工精度的要求。一)近十年建筑的特点:1、规模大,分期分段施工。2、结构复杂、层数多、基础深、机械化施工进度快、设备多样化、安装精度高。二)高层建筑测量的特点:1、由于建筑物层数多,高度高,结构竖向偏差直接影响工程受力情况,故施工测量中要求竖向投点转度高,所选用的仪器和测量方法要适合结构类型、施工方法和场地情况。2、由于建筑物结构复杂、设备和装修标准较高,特别是高速电梯的安装,对施工测量精度要求也高。一般在设计图纸时有说明,总的允许偏差值在施工过程中还产生误差,只能控制在总的偏差值之内。3、由于建筑平面、立面设计新颖又复杂多变,故要求开工前先制定施工测量方案、仪器配备、人员配备,方可施工。 高层建筑施工测量包括:平面控制网的测量,主轴线测设,结构轴线竖向投测,细部放样,高程控制网的建立和传递,沉降观测。
…………密…………封…………线…………内…………请…………不…………要…………答…………题………… 河北工程大学2009~2010学年第一学期期末考试试卷(B) 一、判断题(请阅读每道命题并判断其的对与错,将“√”“×”填在括号内。每题0.5分,共10分) 1.核心价值观是不随趋势和时尚的变化而变化的。() 2.信息收集是有成本的,信息成本是指信息系统的维护、升级、折旧成本以及系统运行和监督成本。() 3.明茨伯格通过研究发现,管理者往往扮演着人际角色、信息角色和决策角色这三类角色。() 4. 决策与计划时常是相互渗透,不可分割的。() 5.信息系统是指一种为管理者收集、处理、维持和分配信息的计算机系统。() 6.决策的原则是最优原则。() 7.企业组织结构是由企业战略决定的。() 8.决策就是管理者识别并解决问题的过程。() 9.计划由明确性程度可分为具体性计划和指导性计划。() 10.组织层次的数量直接决定了管理幅度的大小。() 11.决策的依据是信息。() 12.当组织已经进行前馈控制,不需要再进行反馈控制。() 13.企业通常包括经营决策层、专业管理层、作业管理层三个基本层次。() 14.一般,组织会在营销部门实行集权化管理,而在财务部门实行分权化管理。() 15.《疯狂的赛车》拍摄剧组是典型的“网络组织”结构。() 16.在双因素理论中,令员工产生不满意的因素被称为激励因素。() 17.自适应控制的控制标准值是组织在过去时刻已达到的状态的函数。() 18.在编制计划的过程中,首先要做的是要认清现在,即组织所处的当今环境。() 19.韦伯、法约尔、甘特都是组织管理理论的代表人物。() 20.“诚工”“诚贾”是中国传统管理思想之一。() 二、选择题(每一题至少有一个选项是正确的。请将你认为正确的选项填在括号内。每个2分,共30分) 1、信息系统包含()等部分 A 输入 B 处理 C 输出 D 反馈 2、当管理者的直接下属人数为3时,管理者需要处理的关系数量为() A 44 B 18 C 6 D 36 3、控制根据时机、对象和目的的不同可分为() A 自适应控制 B 程序控制 C 同期控制 D 追踪控制 E 反馈控制
过程控制系统试卷C卷 一、填空题(每空1.5分)(本题33分) 1、过程控制系统一般由控制器、执行器、被控过程和测量变送等环组成。 2、过程控制系统由工程仪表和被控过程两部分组成。 3、压力检测的类型有三种,分别为:弹性式压力检测、应变式压力检测、压阻式压力检测。 4、气动执行结构主要有薄膜式和活塞式两大类。 5、根据使用的能源不同,调节阀可分为气动调节阀、电动调节阀和液动调节阀三大类。 6、过程数学模型的求取方法一般有机理建模、试验建模和混合建模。 7、积分作用的优点是可消除稳态误差(余差),但引入积分作用会使系统稳定性下降。 8、在工业生产中常见的比值控制系统可分为单闭环比值控制、双闭 环比值控制和变比值控制三种。 9、造成积分饱和现象的内因是控制器包含积分控制作用,外因是控制器长 期存在偏差。 二、名词解释题(每小题5分)(本题15分) 1、过程控制:指根据工业生产过程的特点,采用测量仪表、执行机构和计算机等自动化工具,应用控制理论,设计工业生产过程控制系统,实现工业生产过程自动化。 2、串级控制系统:值采用两个控制器串联工作,主控制器的输出作为副控制器的设定值,由副控制器的输入去操纵调节阀,从而对住被控变量具有更好的控制效果。 3、现场总线:是指将现场设备与工业控制单元、现场操作站等互联而成的计算机网络,具有全数字化、分散、双向传输和多分枝的特点,是工业控制网络向现场级发展的产物。 三、简答题(每小题8分)(本题32分) 1、什么是PID,它有哪三个参数,各有什么作用?怎样控制? 答:PID是比例-积分-微分的简称。其三个参数及作用分别为:(1)比例参数KC,作用是加快调节,减小稳态误差。(2)积分参数Ki,作用是减小稳态误差,提高无差度(3)微分参数Kd,作用是能遇见偏差变化趋势,产生超前控制作用,减少超调量,减少调节时间。 2、前馈与反馈的区别有哪些? 答:(1)控制依据:反馈控制的本质是“基于偏差来消除偏差”,前馈控制是“基于扰动消除扰动对被控量的影响”。
1摄影测量与遥感:从非接触成像和其他传感器系统,通过记录、测量、分析与表达等处理,获得地球及其环境和其他物体可靠信息的工艺、科学与技术。 2摄影测量的特点:(1)无需解除物体本身获得被摄物体信息. (2)由二维影响重建三维目标. (3)面采集数据形式. (4)同时提取物体的几何与物理特性 4.摄影测量的技术手段有模拟法、解析法与数字法;摄影测量也经历了模拟摄影测量、解析摄影测量与数字摄影测量三个发展阶段 1空中三角测量:利用航摄像片与所摄目标之间的空间几何关系,根据少量像片控制点,计算待求点的平面位置、高程和像片外方位元素的测量方法。 2像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜即像片有倾斜,地面有起伏时,便会导致地面点在航摄像片上构像相对于在理想情况下的构像,产生了位置的差异,这一差异称为像点位移。 3摄影基线:航线方向相邻两个摄影站点间的空间距离。 4航向重叠:同一条航线上,相邻两张像片应有一定范围的影像重叠,称为航向重叠。 5旁向重叠:相邻航线相邻两像片的重叠度 6同名核线:同一核面与左右影像相交形成的两条核线,其中核面指物方点与摄影基线所确定的平面。 7像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y0 8像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。 9相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型。即确定一个立体像对两像片的相对位置。 10绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数。 13同名像点:同名光线在左右相片上的构像 填空 1、4D产品是指 DEM、DLG、DRG、DOM。 2、摄影测量按用途可分为地形摄影测量、非地形摄影测量。 4、模拟摄影测量是利用光学/机械投影方法实现摄影过程的反转。 5、解析摄影测量以电子计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式来研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学。 6、像点坐标的系统误差改正主要包括底片变形改正,摄影机物镜畸变差改正,大气折光改正和地球曲率改正。 7、共线方程表达的是像点、投影中心与地面点之间关系。 8、立体摄影测量基础是共面条件方程。 9、把一条航线的航摄像片根据地物影像拼接起来,各张像片的主点连线不在一条直线上,而呈现为弯弯曲曲的折线,称航线弯曲。 10、航摄像片为量测像片,有光学框标和机械框标。 11、地图是地面的正射投影,像片是地面的中心投影。 12、在像空间坐标系中,像点的z坐标值都为-f。 13、一张像片的外方位元素包括:三个直线元素(Xs、Ys、Zs ):描述摄影中心的空间坐标值;三个角元素(?、ω、κ) ) :描述像片的空间姿态。 14、相对定向的理论基础、目的、标准是两像片上同名像点的投影光线对对相交。 15、双像解析摄影测量的任务是利用解析计算方法处理立体像对,获取地面点的三维空间信息。 16、在摄影测量中,一个立体像对的同名像点在各自的像平面坐标系的x、y坐标之差,分别称为左右视差、上下视差。 17、解析法相对定向的理论基础是同名光线对对相交于核面内。 18、解析绝对定向需要量测 2 个平高和 1 个高程以上的控制点,一般是在模型四个角布设四个控制点。 19、解析空中三角测量按数学模型分为航带法、独立模型法、光束法。
附件1:河北经贸大学2012-2013学年度三好学生名单 会计学院 彭丽楠刘琪陈健利朱艳安格非杜梦雨高展翔张伟肖张芳芳张梦迪李日成刘梦佳田亚蒙张钰莹范冰川王杰方思雨王天雪陈田园吴英杰仇晓璐孙建荣徐丹阳宋媛媛刘慈张琦苏燕惠康雪晶郭晓玲李佳慧田青朵赵英云范同冉苏艳玲任云云门晓婷刘于王艺婷肖铭铭孙伟刘冬雪郝晨晓宁朝阳李春梅李烁芳陈明兴程培璐柴金月齐宁王翠双于文学刘艳青张立云马晓恬窦志芳尹屹朱丽楠杨媛李慧芳陈敬敬刘伟王梦娇杨会敏邱甜陈朋肖贺佛霞闫健坤张玮林李冰辉吴智伶贾梦露李肖朋田建祝博雅张强宁瑞玲幽明越姜博媛芦飞张蕾孙严毕亚楠李蒙于洋赵江涛吕保收赵丹黄丁丁郑一兵尹哲张萍萍康立周月琴张振丽郝盟盟王倩倩苏芳栗海星于梦菲刘海霞安朋欣郄思思黄卉敏刘佳兰王鑫伟李艳艳张晓欣宋曼于泳雪李净王丽楠颜林静康苗黄京霞董亚涛滕翠红梁晓亭宋倩滑国赏孟晓洋张亚咪高丽佳聂思文刘璐骆慧马佑伟王映宏马燕楠倪广雪马欢邵名童赵晓芳何妍谢令敏马瑞瑶付超聂敬思王欣刘芳秀王星星陈娅彤韩亚楠苏海燕康霄霞潘怡宋丹丹何莹杨凤娇姚萱梁晓燕袁美玉任美静张圣銮周文秀孙丽静张维婷陈颖刘静孟博力宁心怡李玉可张克青高小平赵紫蕾宁钰璇刘欣柳张雅楠赵芹彭田王坤封乐张雪颖宋博李炯 数学与统计学学院 常星星周园园琚江舟孙雪飞杜路肖荆海璐金晓云王晓颖李倩王凤娇李培志冯佳陈彩高翰林孙红霞郑冰冰王玉卓潘茜王晓萌操玉娇关智宇陈雨琪宫东真张亚明卓英楠李兰青赵慧王梦楠王倩宫雅茹李雪梅孙兆蔷杨硕秦利利于慧王丽红李含悦张影孙颖董佳佳尹登博齐威李瑶王哲高雅硕刘丽高雪靳琦琦任佳伟宋美慧 法学院 籍薇崔雪晴秦红吴璐璐陈聪汪洁琼庞海龙张璐李银娇刘璐贾丹边凌飞宋婷婷李春柳金秋李乃晨张永顺李慧娅李星辉张琪魏敬盼贾汉文陈丹丹李菲张曼菲韩文倩赵旭蒋丹邢梦媛马宝蓉韩旭胡蔚侯晓梅林晨阳尹娜娜秦叶张红霄王洁王俊兰张虹宇卢秋如聂小兰许岩梁飞闫帅岗王若邻宗琮秦莎王冰玉李德陶江润王海燕王震赵雨惠 艺术学院 侯建平石丽媛刘雪振唐爱红褚众刘飞韩佳晓徐菁李娇侯晓蕾岳琳王艳姚澈李佳罗娜孟鸽李倩江丽君孟自强张倩史苗苗许晖郎珊珊杨静甄林凡刘林玉张琴高鹏飞崔文奇范小帅路金山马秋晨王硕牛璐尚佳伟卢博文张丽苹贺娇娇王晓军孙友文耿哲任智胜李凤玲邢红霞杨梦豪李欢欢唐玉璟陈禹竹李浩萍秦伟
过程控制期末试题库 (适用于沈阳建筑大学自动化专业期末考试) 一、填空题(本题共计10分,包括3小题,10个填空,每空1分) 1.一般一个简单控制系统由(检测/变送)装置、(被控对象)、(调节)器和(执行)机构组成。 2.过程控制系统常用的参数整定方法有:(经验法)、(衰减曲线法)、(稳定边界法/临界比例度法)和(响应曲线法)。 3.在PID调节器中,调节器的Kc越大,表示调节作用(越强),Ti值越大,表示积分作用(减弱),Td值越大表示微分作用(增强)。 4.常见的过程计算机控制系统分为下列几种典型形式:(操作指导控制系统)、直接数字控制系统、(监督计算机控制系统)、(集散控制系统)和现场总线控制系统。 5.在闭环控制系统中,根据设定值的不同形式,又可分为定值控制系统,随动控制系统和程序控制系统。 1)定值控制系统 特点:设定值是(固定不变); 作用:保证在(扰动)作用下使被控变量始终保持在设定值上。 2)随动控制系统 特点:设定值是一个(变化量); 作用:保证在各种条件下系统的输出(及时跟踪设定值变化)。 3)程序控制系统 特点:设定值是一个(按一定时间程序变化的时间函数); 作用:保证在各种条件下系统的输出(按规定的程序自动变化)。 6.热电偶温度计的基本组成部分部分是(热电偶)、(测量仪表)、(连接热电偶)和(测量仪表的导线)。 7.串级控制系统能迅速克服进入(副)回路的扰动,改善(主)控制器的广义对象特性,容许(副)回路内各环节的特性在一定的范围内变动而不影响整个系 统的控制品质。 8.定值控制系统是按(偏差)进行控制的,而前馈控制是按(扰动)进行控制的;前者是(闭)环控制,后者是(开)环控制。 二、选择题(本题共计10分,包括5小题,每题2分) 1.由于微分调节规律有超前作用,因此调节器加入微分作用主要是用来(C):
一、名词解释 1.断链:指的是因局部改线或分段测量等原因造成的桩号不相连接的现象。 2.一井定向:通过一个立井向井下传递坐标及高程。 3.井筒中心线:通过井筒中心的铅垂线。 4.方向附合导线:用陀螺经纬仪测定支导线的起始和最末边的方位角时,则这种导线叫作方向附合导线。 5.贯通测量:采用两个或多个相向或同向掘进的工作面,同时掘进同一巷道,使其按照设计要求在预定地点正确接通而进行的测量工作。 1.导坑:导坑是为修筑隧道在断面上最先开挖的小坑道。 2.贯通误差:在隧道工程中,两个相向开挖的工作面的施工中线往往因测量误差,产生的上下或左右错开现象。 3.近井点:在布设矿区控制网时,在每个井口附近设立的将地而的坐标系统传递到井下去的控制点。 4.给中线:将图纸上设计好的巷道标设到实地,指导掘进方向和位置,边掘边标,不断向前推进。 5.联系测量:通过平峒、斜井及竖井将地面的平面坐标系统及高程系统传递到地下,使地面与地下建立统一的坐标系统的工作。 6.井筒十字中线:通过井筒中心且互相垂直的两条方向线。 二、简答题 1.与地面导线测量相比,地下工程中的地下导线测量具有哪些特点? 答:(1)由于受坑道的限制,其形状通常形成延伸状。地下导线不能一次布设完成,而是随着坑道的开挖而逐渐向前延伸。 (2)导线点有时设于坑道顶板,需采用点下对中。 (3)随着坑道的开挖,先敷设边长较短、精度较低的施工导线,指示坑道的掘进。而后敷设高等级导线对低等级导线进行检查校正。 (4)地下工作环境较差,对导线测量干扰较大。 2.井下经纬仪导线钢尺量边需要加入哪几项改正? 答:尺长改正、温度改正、拉力改正、垂曲改正、倾斜边长化算成水平变长的改正、将导线边长化算到海平面的改正、导线边长化归高斯投影面的改正。 3.简述复测法观测一个复测的测角过程? 答:测量的步骤如下: (1)设预测角度ABC(图2-12)再测站C上安装平时对中经纬仪后将度盘对在0°附近;(2)用复侧纽将读盘和照部锁紧,旋转照准部瞄准后视点A,读起始数a; (3)松开复测钮(即放开了度盘),顺时针方向旋转照准部B,瞄准前视点并取检验读数b1;(4)算出检验角并倒转望远镜; (5)扣紧复测钮,照准后视点A; (6)松开复测钮,顺时针方向旋转照准部瞄准前视点B,取最终读数b。 4.简述两井定向的作业过程。 答:在两井筒中各挂一根垂球线,在地面上测定两垂球线的坐标,并计算其连线的坐标方位角。然后在井下巷道中,用经纬仪导线将两垂球线进行连测,取一假定坐标系统来确定井下两垂球线连线的假定方位角,然后将其与地面上确定的坐标方位角相比较,其差值便是井下假定坐标系统和地面坐标系统的方位差,这样便可确定井下导线在地面坐标系统中的坐标方位角。
河北工程大学2009~2010学年第一学期期末考试试 卷(B) 一、判断题 (请阅读每道命题并判断其的对与错,将“√”“×”填在括号内。每题0.5分,共10分) 1.核心价值观是不随趋势和时尚的变化而变化 的。() 2.信息收集是有成本的,信息成本是指信息系统的维护、升级、折旧成本以及系统运行和监督成本。() 3.明茨伯格通过研究发现,管理者往往扮演着人际角色、信息角色和决策角色这三类角色。() 4. 决策与计划时常是相互渗透,不可分割 的。 () 5.信息系统是指一种为管理者收集、处理、维持和分配信息的计算机系 统。() 6.决策的原则是最优原 则。 ()
7.企业组织结构是由企业战略决定 的。 () 8.决策就是管理者识别并解决问题的过 程。 () 9.计划由明确性程度可分为具体性计划和指导性计 划。() 10.组织层次的数量直接决定了管理幅度的大 小。() 11.决策的依据是信 息。 () 12.当组织已经进行前馈控制,不需要再进行反馈控 制。() 13.企业通常包括经营决策层、专业管理层、作业管理层三个基本层 次。() 14.一般,组织会在营销部门实行集权化管理,而在财务部门实行分权化管理。() 15.《疯狂的赛车》拍摄剧组是典型的“网络组织”结 构。()
16.在双因素理论中,令员工产生不满意的因素被称为激励因 素。() 17.自适应控制的控制标准值是组织在过去时刻已达到的状态的函 数。() 18.在编制计划的过程中,首先要做的是要认清现在,即组织所处的当今环境。() 19.韦伯、法约尔、甘特都是组织管理理论的代表人 物。() 20.“诚工”“诚贾”是中国传统管理思想之 一。 () 二、选择题 (每一题至少有一个选项是正确的。请将你认为正确的选项填在括号内。每个2分,共30分) 1、信息系统包含()等部分 A 输入 B 处理 C 输出 D 反馈 2、当管理者的直接下属人数为3时,管理者需要处理的关系数量为 () A 44 B 18 C 6 D 36 3、控制根据时机、对象和目的的不同可分为() A 自适应控制 B 程序控制 C 同期控制 D 追踪控制 E 反馈控制
三:简答题32分 1.什么是PID,它有哪三个参数,各有什么作用?怎样控制? 答: PID是比例-积分-微分的简称。其三个参数及作用分别为: (1)比例参数KC,作用是加快调节,减小稳态误差。 (2)积分参数Ki,作用是减小稳态误差,提高无差度 (3)微分参数Kd,作用是能遇见偏差变化趋势,产生超前控制作用,减少超调量,减少调节时间。 2.正反方向判断气开气关,如何选择?P84 答:所谓起开式,是指当气体的压力信号增大时,阀门开大;气关式则相反,压力增大时,阀门关小。气动调节阀气开气关形式的选择,主要从工艺生产的安全来考虑的。详见例题3-5 气开气关调节阀的选择主要是从生产安全角度和工艺要求考虑的,当信号压力中断时应避免损坏设备和伤害操作人员。如阀门处于开的位置时危害性小,则应选气关式反之选用气开式。 3.控制器正反方向判断 P133 答:所谓作用方向,就是指输入作用后,输出的变化方向。当输入增加时,输出也增加,则成该环节为“正环节”,反之,当输入增加时,输出减少,则称“反作用”。具体步骤 (1),判断被控对象的正/反作用那个方向,主要由工艺机理确定。 (2)确定执行器的正/反作用方向由安全工艺条件决定。 (3)确定广义对象的正/反作用方向 (4)确定执行器的正/反作用方向 4.串级系统方框图P176及特点是什么? 答:特点(1)减小了被控对象的等效时间常数;(2)提高了系统工作频率;(3)对负载变化有一定的自适应能力。 5.前馈反馈的区别有哪些? 答:(1)控制依据:反馈控制的本质是“基于偏差来消除偏差”,前馈控制是“基于扰动消除扰动对被控量的影响”。 (2)控制作用发生时间方面:反馈控制器的动作总是落后于扰动作用的发生,是一种“不及时”的控制;扰动发生后,前馈控制器及时动作。
第五章力法 一、基本内容及学习要求 本章内容包括:力法的基本概念,超静定次数的确定和力法的典型方程,力法计算超静定刚架,超静定结构的位移计算和最后内力图校核,对称性的利用以及单跨超静定梁的杆端内力等。 重点是力法的基本原理。 作为解算超静定结构的基本方法之一,力法十分重要。通过本章的学习应达到: (1)掌握力法的基本原理。对基本结构的作用和选取、力法典型方程的建立及其物理意义、方程系数和自由项的含义有清楚的理解。 (2)熟练掌握荷载作用下用力法计算超静定刚架的方法和步骤。 (3)掌握利用对称性简化计算的方法。 (4)掌握超静定结构的位移计算及最后内力图的校核方法。 二、学习指导 (一)超静定结构的两个特征 教材§5—1指出:超静定结构的静力特征是具有多余约束力(简称多余力),即仅凭静力平衡条件无法求出结构的全部反力和内力;其几何组成特征是几何不变且具有多余约束。 这两个特征存在密切的内在联系。由于约束和约束力 的对应关系,多余约束和多余力的数量相等,它的存在使 超静定结构独立未知量的数目大于独立平衡方程的数目。 图5.1所示结构为具有一个多余约束的超静定刚架,总计 4个支座反力仅能列出3个独立平衡方程,说明存在一个未
知的多余力,只用静力平衡方程不可能求出全部支座反力,也无法确定各截面内力。 超静定结构的静力特征由其几何组成决定。为解算超静定结构必须先确定和求出多余力,这就要求除静力平衡方程外还需补充求解多余力的方程。补充方程的数目等于多余力的个数,即具有n个多余力的n次超静定结构须补充n个方程方可求解。 (二)荷载作用下的力法典型方程 教材第三版§5—2(第四版§5—1)以一端固定一端铰支的单跨超静定梁为例,阐述了力法的基本原理和计算方法。即以多余力为基本未知量,把求解荷载作用下的超静定结构(称为原结构)转化为对静定基本结构的计算。转化的条件是基本结构在原荷载和所有多余力的共同作用下,沿各多余力方向的位移应与原结构的相应位移一致。据此建立力法方程并求出多余力,此后的计算即与静定结构无异。 力法解算超静定结构的关键,是根据基本结构在去掉多余约束处的位移条件,建立力法方程以求解多余力。反映位移条件的力法方程本质是变形协调方程(几何方程),方程本身及其系数和自由项都有明确的物理意义。下面以简例再加说明。图5.2a所示一次超静定梁取图5.2b所示基本体系时,其力法方程为 δ11X1+△1P=0
1.控制系统对检测变送的基本要求是___准确___、__迅速__和可靠 2.从理论上讲,干扰通道存在纯滞后不影响系统的控制质量。 3.离心泵的控制方案有直流节流法、改变泵的转速n 改变旁路回流量。效 率最差的是改变旁路回流量。 4.随着控制通道的增益K o的增加,控制作用___增强_______,克服干扰能力- ___最大______,最大偏差_____减小_____系统的余差减小 5.控制器的选择包括结构材质的选择、口径的选择、流量特性的选择和 正反作用的选择。 6.防积分饱和的措施有对控制器的输出限幅、限制控制器积分部分的输出 和积分切除法。 7.如果对象扰动通道增益K f增加,扰动作用__增强__,系统的余差__增大__,最 大偏差_增大___。 8.简单控制系统的组成,各部位的作用是什么? 解答: 简单控制系统由检测变送装置、控制器、执行器及被控对象组成。 检测变送装置的作用是检测被控变量的数值并将其转换为一种特定输出信号。 控制器的作用是接受检测装置送来的信号,与给定值相比较得出偏差,并按某种运算规律算出结果送往执行器。 执行器能自动地根据控制器送来的控制信号来改变操纵变量的数值,以达到控制被控变量的目的。 被控对象是指需要控制其工艺参数的生产设备或装置 9.气动执行器由__调节__机构和执行机构两部分组成,常用的辅助装置有 __阀门__定位器和手轮机构。 10.调节系统中调节器正反作用的确定依据是保证控制系统成为负反馈。 11.被控变量是指工艺要求以一定的精度保持__恒定 _或随某一参数的变化而 变化的参数。 12.反应对象特性的参数有放大倍数、时间常数、和纯滞后时间。 13.自动调节系统常用参数整定方法有哪些?常用的参数整定方法有!经验法*衰 减曲线法*临界比例度法*反应曲线法) 动态特性参数法,稳定边界法,衰减曲线法,经验法。 14.检测变送环节对控制系统的影响主要集中在检测元件的滞后和信号传递 的滞后问题上。 15.什么是对象数学模型,获取模型的方法有哪些? 答:对对象特性的数学描述就叫数学模型。 机理建模和实验建模系统辨识与参数估计。解析法)和(实验辨识法) 机理建模:由一般到特殊的推理演绎方法,对已知结构、参数的物理系统运用相应的物理定律或定理,根据对象或生产过程的内部机理,经过合理的分析简化而建立起描述系统各物理量动静态性能的数学模型。 实验建模步骤:1确定输入变量与输出变量信号;2测试;3对数据进行回归分析。 16.简述被控量与操纵量的选择原则。.
一、选择 1、法约尔所提出的管理的十四项原则不包括()。 A权力与责任 B 统一指挥 C 统一协调 D 等级链 E 集权与分权 2、()被称为是“科学管理之父”。 A亚当斯密 B 罗伯特欧文 C 泰罗 D 法约尔 3、可以使管理幅度增加的因素是()。 A下属的工作内容和性质相近 B 主管人员处于较高层次 C 下属的能力较差 D 组织所面临的环境变化较快 E 下属空间分布分散 4、下列方法中,主要应用于对国际经营环境的对比分析的是()。 A冷热分析法 B 等级尺度法 C 多因素平价法 5、组织文化的三个层次结构中,最直观、人们最易感知的部分是()。 A精神层 B 制度层 C 物质层 6、在各个控制类型中,()的控制标准Z值有某一目标函数的最大值或最小值构成。A程序控制 B 跟踪控制 C 自适应控制 D 最佳控制 7、下列不属于激励过程理论的()。 A强化理论 B 成就需要论 C 期望理论 D 公平理论 8、关于领导者必须具备的素质,不正确的是()。 A有部下或追随者 B 拥有影响追随者的能力或力量 C 具有明确的目的 D 没有上级 9、组织文化的特性不包括()。 A民族性 B 多样性 C 整体性 D 绝对性 10、下列情况下,宜采用内部提升的是()。 A高层次管理人员的选拔 B 外部环境剧烈变化时 C 处于成熟期的企业11、不属于人际关系学说主要观点的是()。 A企业的职工是社会人B生产效率取决于工人的工作态度及与他人的关系 C 企业中实际存在着一种非正式组织 D 人的行为都是由一定的动机引起的 12、下列关于头脑风暴法的说法,不正确的是()。 A相关专家或人员各自发表自己的意见,对别人的建议不作评论 B 所发表的建议必须深思熟虑 C 鼓励独立思考,奇思妙想 D 可以补充完善已有的建议 13、下列关于财务计划、人事计划与业务计划的关系描述不正确的是()。 A业务计划与人事计划是为财务计划服务的 B 财务计划研究如何从资本的提供和利用上促进业务活动的有效进行 C 人事计划分析如何为业务规模的维持或扩大提供人力资源的保证 14、根据价值链分析法,下列属于辅助活动的是()。 A内部后勤 B 技术开发 C 生产作业 D 服务
河北工程大学管理学 试卷g
河北工程大学 ~ 学年第学期期末考试试卷 一、填空题(每空0.5分,共15分) 1. 被称为“人事管理之父”。 2.明茨伯格研究发现管理者扮演着十种角色,这十种角色可以被归入三类:、和。 3.目标管理的基本过程、、、、。 4.从决策的重要性来看,可以分为:、和。 5.按照计划内容的表现形式分类,计划可分为:、、、、 、、、。 6.组织中的职权分为:、和。 7.路径-目标理论提出了两类情境变量作为领导行为-结果关系的中间变量,即和 。 8.根据控制的时机、对象和目的的不同,可分为:、和。 9.领导权力运用方式,可以将领导风格分为两类:和。 二、选择题(每个2分,共20分) 1、法约尔所提出的管理的十四项原则不包括() A 能力与工作相适应 B 统一指挥 C 集权与分权 D 等级链与跳板 2、韦伯认为理想的行政组织的权力基础应是() A 超凡权力 B 传统权力 C 理性-合法权力 D 三者的结合
3、可以使管理幅度增加的因素是() A 下属的工作内容和性质相近 B 主管人员处于较高层次 C 下属的能力较差 D 组织所面临的环境变化较快 4、在管理方格理论中将9.9型管理方式称为() A 乡村俱乐部型管理 B 中庸之道型管理 C 任务型管理 D 团队型管理 5、根据波士顿矩阵,相对市场占有率高、销售增长率低的产品,属于() A 金牛产品 B 瘦狗产品 C 明星产品 D 问题产品 6、不属于人际关系学说的观点是() A 工人是社会人 B 管理者的权威来自下级的认可 C 企业中存在非正式组织 D 生产效率取决于工人的工作态度及与他人的关系 7、按照明茨伯格的观点,管理者在人际关系方面要扮演的角色之一为() A 企业家 B 谈判者 C 发言人 D 联络者 8、根据价值链分析法,下列属于辅助活动的是()。 A 内部后勤 B 技术开发 C 生产作业 D 服务 9、根据马斯洛的理论,人的第三层次的需求为() A 安全需求 B 社会需求 C 自尊需求 D 成就需求 10、下列哪个特点不是滚动计划法的优点() A 计划更切合实际 B 长、中、短计划相互衔接 C 有利于考核 D 加强了计划的弹性 三、简答题(每题6分,共30分) 1、简述泰罗的科学管理理论。
赵朴英简介 赵朴英,女,汉族,1955年出生, 南开大学世界经济硕士研究生,河北经 贸大学法学院副院长,法学教授,国际 法硕士生导师。社会兼职:中国法学会 国际经济法研究会理事;河北省WTO 法研究会秘书长;石家庄仲裁委员会仲 裁员;石家庄市中级人民法院专家咨询员;河北北华律师事务所律师。科研成果:承担省级以上课题2项、省教育厅课题1项、省法学会课题1项;撰写著作、教材3部;发表论文20余篇;获得省级科研奖励1项。 梁洪杰简介 梁洪杰,河南柘城人,北京大学国 际法硕士,对外经济贸易大学国际法博 士,师从于沈四宝先生。河北经贸大学 法学院副院长,法学教授,国际法硕士 生导师。兼任河北省人民政府法律顾 问、省政协委员;河北省WTO法研究会 副会长、河北省经济法研究会副会长、中国法学会WTO法研究会理事、国际消费法协会(IACL)理事、石家庄市中级法院咨询专家等多项社会职务。著有《当代国际经济法理论与实务》等著作7部;在《法学家》、《Consumer Law Journal》等国内外学术刊物上发表学术论文70余篇;承担国家留学基金委、中国法学会、省社科规划等课题11项。
段卫华简介 段卫华,河南许昌人,河北经贸 大学法学院教授,国际法学硕士生导 师。1985年毕业于中国政法大学,获 法学学士学位,1999年获中国人民大 学法学硕士学位。主要研究领域:国 际民商事法律适用法,国际民事诉讼 法,国际商事仲裁法。主讲国际私法、 经济法通论等本科和研究生课程。著有《自然资源物权法律制度研究》等著作,在《光明日报》、《河北法学》、《现代财经论坛》等报刊杂志上发表学术论文20余篇,主持和参与省级课题4项,主持横向课题2项。河北三和时代律师事务所兼职律师,沧州仲裁委员会仲裁员。 宋忠胜简介 宋忠胜,男,1971年11月出生,河北省沧州东光县人, 中国社会科学院法学硕士。近五年发表论文十三篇,主 持省部级课题五项,厅局级课题两项。主讲研究生课程 《国际民商事判例研究》、本科生课程《国际法》。近五 年获十大教学标兵一次、学生喜爱的教师两次、教学优 秀奖两次。
三:简答题 32分 1.什么是PID,它有哪三个参数,各有什么作用?怎样控制? 答: PID是比例-积分-微分的简称。其三个参数及作用分别为: (1)比例参数KC,作用是加快调节,减小稳态误差。 (2)积分参数Ki,作用是减小稳态误差,提高无差度 (3)微分参数Kd,作用是能遇见偏差变化趋势,产生超前控制作用,减少超调量,减少调节时间。 2.正反方向判断气开气关,如何选择? P84 答:所谓起开式,是指当气体的压力信号增大时,阀门开大;气关式则相反,压力增大时,阀门关小。气动调节阀气开气关形式的选择,主要从工艺生产的安全来考虑的。详见例题3-5 气开气关调节阀的选择主要是从生产安全角度和工艺要求考虑的,当信号压力中断时应避免损坏设备和伤害操作人员。如阀门处于开的位置时危害性小,则应选气关式反之选用气开式。 3.控制器正反方向判断 P133 答:所谓作用方向,就是指输入作用后,输出的变化方向。当输入增加时,输出也增加,则成该环节为“正环节”,反之,当输入增加时,输出减少,则称“反作用”。具体步骤 (1),判断被控对象的正/反作用那个方向,主要由工艺机理确定。 (2)确定执行器的正/反作用方向由安全工艺条件决定。 (3)确定广义对象的正/反作用方向 (4)确定执行器的正/反作用方向 4.串级系统方框图 P176及特点是什么? 答:特点(1)减小了被控对象的等效时间常数;(2)提高了系统工作频率;(3)对负载变化有一定的自适应能力。 5.前馈反馈的区别有哪些? 答:(1)控制依据:反馈控制的本质是“基于偏差来消除偏差”,前馈控制是“基于扰动消除扰动对被控量的影响”。 (2)控制作用发生时间方面:反馈控制器的动作总是落后于扰动作用的发生,是一种“不及时”的控制;扰动发生后,前馈控制器及时动作。
《测量学》课程期末考试知识点 (一)第一章 绪论 1、测量学研究的对象和任务是什么?测量学、地物、地貌、地形、测定、测设的定义? 测量学的研究对象:研究地球的形状与大小,确定地球表面各种物体的形状大小,空间位置的科学。 测量学的主要任务:测定与测设。 测量学:研究地球表面局部地区内测绘工作的基本原理、计算、方法和应用的学科,测量学将地表物体分为地物和地貌。 地物:地面上的天然或人工形成的物体,它包括湖泊、河流、海洋、房屋、道路、桥梁等。 地貌:地表高低起伏的形态,它包括山地、丘陵和平原等。 地形:地物和地貌的总称。 测定:使用测量仪器和工具,通过测量与计算将地物和地貌的位置按一定比例尺。规定的符号缩小绘制成地形图,供科学研究和工程建设规划设计使用。 测设:将在地形图上设计出的建筑物和构造物的位置在湿地标定出来,作为施工的依据。 2、水准面、大地水准面、铅垂线、参考椭球面和法线的定义是什么? 水准面:假象静止不动的水面延伸穿过陆地,包围整个地球,形成一个封闭的曲面。 大地水准面:与平均海水面相吻合的水准面。 铅垂线:物体重心与地球重心的连线称为铅垂线。 参考椭球面:旋转椭球又称参考椭球,其表面称为参考椭球面。 法线:由地表任一点向参考椭球面所作垂线。 3、外业测量工作的基准面和基准线是什么? 基准面:水准面 基准线:铅垂线 4、测量中点位的表示方法是什么? 地理坐标系、直角坐标系(高斯坐标、假定坐标) 5、确定地面点相对位置的三个基本几何要素是什么? 水平角(方向)、距离、高差 6、简述测量平面直角坐标系统与数学坐标系统的不同之处?为什么这样规定? X 与y 轴的位置互换,第一象限位置相同,二→三→四象限顺时针编号。在数学上使用三角函数在高斯平面直角坐标中照常使用。 7、高斯平面直角坐标是怎样建立的? 将中央子午线东西各一定经差范围内的地区投影到椭球柱面上,再将该横椭球柱面沿过南、北极点的母校切开展平,便构成了高斯直角坐标系。 8、北京某点的大地精度为116°20′,试计算它所在的6°带和3°带的带号,相应的中央子午线经度是多少? ①6°:N=Int ((L+3)/6 +0.5) Lo=6N-3 Lo 为中央子午经度 ②3°:n=Int((L/3)+0.5) Lo=3n 9、绝对高程和相对高程的定义,两点间的高程如何计算? 决定高程:地面点到大地水准面的铅垂距离称为改点的绝对高程或海拔,简称高程。 相对高程:在局部地区,当无法知道绝对高程时,也可假定一个水准面作为高程的起算面,地面点到假定水准面的垂直距离,称为假定高程或相对高程。 A B A B AB H H H H h '-'=-= 10、简述测量工作的基本原则。 从整体到局部,先控制后碎部。