一、pc机上的串口通信编程过程如下:
1.建立项目
打开VC++6.0,建立一个基于对话框的MFC应用程序SCommTest(与我源代码一致,等会你会方便一点);
2.在项目中插入MSComm控件
选择Project菜单下Add To Project子菜单中的Components and Controls…选项,在弹出的对话框中双击Registered ActiveX Controls项(稍等一会,这个过程较慢),则所有注册过的ActiveX控件出现在列表框中。选择Microsoft Communications Control, version 6.0,,单击Insert按钮将它插入到我们的Project中来,接受缺省的选项。(如果你在控件列表中看不到Microsoft Communications Control, version 6.0,那可能是你在安装VC6时没有把ActiveX一项选上,重新安装VC6,选上ActiveX 就可以了),
这时在ClassView视窗中就可以看到CMSComm类了,(注意:此类在ClassWizard中看不到,重构clw文件也一样),并且在控件工具栏Controls中出现了电话图标(如图1所示),现在要做的是用鼠标将此图标拖到对话框中,程序运行后,这个图标是看不到的。
3.利用ClassWizard定义CMSComm类控制对象
打开ClassWizard->Member Viariables选项卡,选择CSCommTestDlg类,为IDC_MSCOMM1添加控制变量:m_ctrlComm,这时你可以看一看,在对话框头文件中自动加入了
//{{AFX_INCLUDES() #include "mscomm.h" //}}AFX_INCLUDES (这时运行程序,如果有错,那就再从头开始)。
4.在对话框中添加控件
向主对话框中添加两个编辑框,一个用于接收显示数据ID为IDC_EDIT_RXDATA,另一个用于输入发
送数据,ID为IDC_EDIT_TXDATA,再添加一个按钮,功能是按一次就把发送编辑框中的内容发送一次,将其ID设为IDC_BUTTON_MANUALSEND。别忘记了将接收编辑框的Properties->Styles中把Miltiline和Vertical Scroll属性选上,发送编辑框若你想输入多行文字,也可选上Miltiline。
再打开ClassWizard->Member Viariables选项卡,选择CSCommTestDlg类,为
IDC_EDIT_RXDATA添加CString变量m_strRXData,为IDC_EDIT_TXDATA添加CString变量m_strTXData。说明:m_strRXData和m_strTXData分别用来放入接收和发送的字符数据。
5.添加串口事件消息处理函数OnComm()
打开ClassWizard->Message Maps,选择类CSCommTestDlg,选择IDC_MSCOMM1,双击消息OnComm,将弹出的对话框中将函数名改为OnComm,(好记而已)OK。
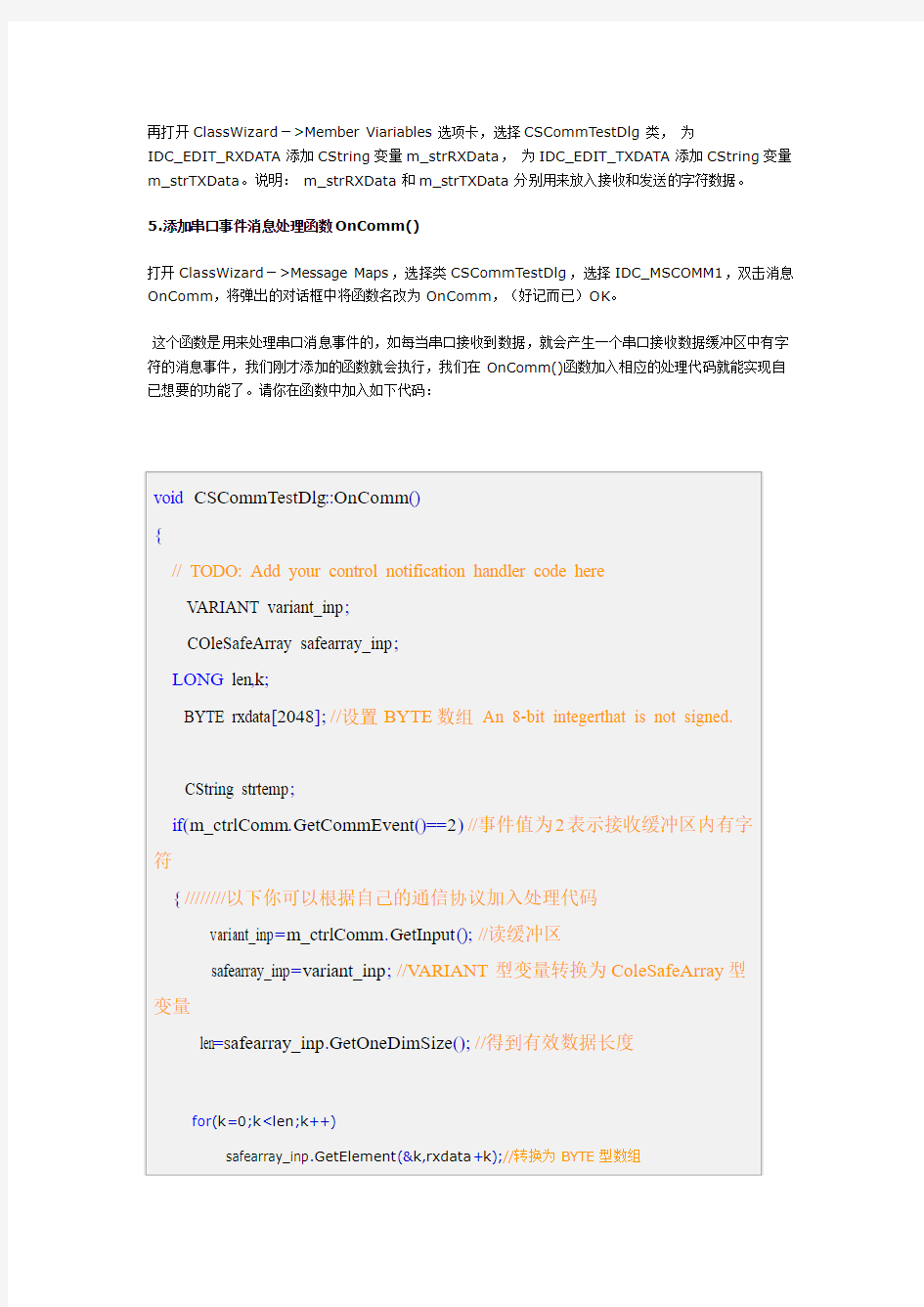
这个函数是用来处理串口消息事件的,如每当串口接收到数据,就会产生一个串口接收数据缓冲区中有字符的消息事件,我们刚才添加的函数就会执行,我们在OnComm()函数加入相应的处理代码就能实现自已想要的功能了。请你在函数中加入如下代码:
到目前为止还不能在接收编辑框中看到数据,因为我们还没有打开串口,但运行程序不应该有任何错误,不然,你肯定哪儿没看仔细,因为我是打开VC6对照着做一步写一行的,运行试试。没错吧?那么做下一步:
6.打开串口和设置串口参数
你可以在你需要的时候打开串口,例如在程序中做一个开始按钮,在该按钮的处理函数中打开串口。现在我们在主对话框的CSCommTestDlg::OnInitDialog()打开串口,加入如下代码:
现在你可以试试程序了,将串口线接好后(不会接?去看看我写的串口接线基本方法),打开串口调试助手,并将串口设在com2,选上自动发送,也可以等会手动发送。再执行你编写的程序,接收框里应该有数据显示了。
7.发送数据
先为发送按钮添加一个单击消息即BN_CLICKED处理函数,打开ClassWizard->Message Maps,选择类CSCommTestDlg,选择IDC_BUTTON_MANUALSEND,双击BN_CLICKED添加OnButtonManualsend()函数,并在函数中添加如下代码:
二、单片机89C51串口通信的C语言程序:
每当pc机通过串口向单片机发送一非0数据,单片机就通过串口向pc机发送数字0~9
//数码管控制端
sbit ds = P1^0;
//字型码锁存器74ls373的控制端LE
sbit ctrl373 = P3^7;
//要显示的数据
unsigned int dsData = 0;
//发送标志:标示是否向pc机发送数据
bit send= 0;
//数码管显示函数
void display(unsigned int Data)
{
ctrl373 = 1;
ds = 1;
P2 = ds_code[Data];
ds = 0;
ctrl373 = 0;
}
//串口中断函数
void serialPort() interrupt 4
{
//循环的向pc机发送0~9
if(TI == 1 &&send== 1)//发送数据{
//清除发送中断申请标志
TI = 0;
send= 0;
dsData++;
if(dsData > 9)
{
dsData = 0;
}
//以ASCII方式发送数据
SBUF = dsData + 48;
}
if(RI == 1)//接收数据
{
//清除接收中断申请标志
RI = 0;
//接收到得数据为ASCII码形式,需做减8处理
//若从pc机接收到一非0数据,就将send置1,向pc机发送1字节数据
send= SBUF - 48;
}
}
void main()
{
EA = 1;//打开总中断
ES = 1;//打开串口中断
SCON = 0x52;//串口工作方式1,允许接收,无校验,可发送数据TMOD = 0x20;//定时器1工作方式2
TH1 = 0xf3;
TL1 = 0xf3;//定时器1计数初值243,即串口波特率为2400bit/s
实验结果:
《专业综合实习报告》 专业:电子信息工程 年级:2013级 指导教师: 学生:
目录 一:实验项目名称 二:前言 三:项目内容及要求 四:串口通信原理 五:设计思路 5.1虚拟串口的设置 5.2下位机电路和程序设计 5.3串口通信仿真 六:电路原理框图 七:相关硬件及配套软件 7.1 AT89C51器件简介 7.2 COMPIN简介 7.3 MAX232器件简介 7.4友善串口调试助手 7.5 虚拟串口软件Virtual Serial Port Driver 6.9八:程序设计 九:proteus仿真调试 十:总结 十一:参考文献 一:实验项目名称:
基于51单片机的单片机与PC机通信 二:前言 在国内外,以PC机作为上位机,单片机作为下位机的控制系统中,PC机通常以软件界面进行人机交互,以串行通信方式与单片机进行积极交互,而单片机系统根据被控对象配置相应的前向,后向信息通道,工作时作为主控机测对象,作为被控机接受PC机监督,指挥,定期或受命向上位机提供对象及本身的工作状态信息。 目前,随着集成电路集成度的增加,电子计算机向微型化和超微型化方向发展,微型计算机已成为导弹,智能机器人,人类宇宙和太空和太空奥妙复杂系统不可缺少的智能部件。在一些工业控制中,经常需要以多台单片机作为下位机执行对被控对象的直接控制,以一台PC机为上位机完成复杂的数据处理,组成一种以集中管理、分散控制为特点的集散控制系统。 为了提高系统管理的先进性和安全性,计算机工业自动控制和监测系统越来越多地采用集总分算系统。较为常见的形式是由一台做管理用的上位主计算机(主机)和一台直接参与控制检测的下位机(单片机)构成的主从式系统,主机和从机之间以通讯的方式来协调工作。主机的作用一是要向从机发送各种命令及参数:二是要及时收集、整理和分析从机发回的数据,供进一步的决策和报表。从机被动地接受、执行主机发来的命令,并且根据主机的要求向主机回传相应烦人实时数据,报告其运行状态。 用串行总线技术可以使系统的硬件设计大大简化、系统的体积减小、可靠性提高。同时,系统的更改和扩充极为容易。MCS-51系列单片机,由于内部带有一个可用于异步通讯的全双工的穿行通讯接口,阴齿可以很方便的构成一个主从式系统。 串口是计算机上一种非常通用的设备通讯协议,大多数计算机包容两个基于RS232的串口。串口同时也是仪器仪表设备通过用的通讯协议,很多GPIB兼容的设备也带有RS-232口。同时串口通讯协议也可以用于获取远程采集设备数据。所以,深入的理解学习和研究串口通信相关知识是非常必要的。此次毕业设计选题为“PC机与MCS-51单片机的串口通讯”,使用51单片机来实现一个主从式
51串口通信程序(带详细注释) #include#include //后面有一个比较函数#define uchar unsigned char#define uint unsigned intbit UART_Flag=0; //定义串口接收标志位 uchar str[50]; //定义一数组uchar length=0; //数组长度从0 开始void init() //初 始化uart{ TMOD=0X20; //定时器1 定时器方式工作模式2,可自动重载的8 位计数器常把定时/计数器1 以模式2 作为串行口波特率发生器 SCON=0X50; //选择工作模式1 使能接收,允许发送,允许接收 EA=1; //开总中断 ES=1; //打开串口中断ET1=0; //打开定时器中断 PCON=0X80; //8 位自动重载,波特率加倍 TH1=0XFF; //用22.1184 mhz 波特率 TL1=0XFF;TR1=1; //打开中时器 }void UART_Putch(uchar dat) //输出一个字符{SBUF=dat; //把数据送给sbuf 缓 存器中 while(TI!=1);//发送标志位TI 如果发送了为1,没发送为0,没发送等待,到 了退出循环 TI=0; //到了,TI 清为0 }void init1() interrupt 4 //uart 中断,4 为串口中断{ if(RI==1) //收到数据{ uchar m=SBUF; //m 为计算机发送给串口的数据,例,open //总体思想是,计算 机通知串口,我要发数据了RI=0; //收到清0 if(m==) //判断m 这位数据有无{ UART_Putch(); //回车UART_Putch(); // 换行str[length]=; //数据最后位加0 标 志位表示发完了数据UART_Flag=1; // 传完标志位} else if(m==) { } else if(m==)//b表退格//下面几句表删锄{ UART_Putch();
Qt编写串口通信程序图文详解 (说明:我们的编程环境是windows xp下,在Qt Creator中进行,如果在Linux下或直接用源码编写,程序稍有不同,请自己改动。) 在Qt中并没有特定的串口控制类,现在大部分人使用的是第三方写的qextserialport类,我们这里也是使用的该类。我们可以去 https://www.doczj.com/doc/7613337815.html,/projects/qextserialport/files/ 进行下载,也可以去下载我上传到网上的: https://www.doczj.com/doc/7613337815.html,/bbs/read.php?tid=22847 下载到的文件为:qextserialport-1.2win-alpha.zip 其内容如下图: 我们在windows下只需要使用其中的6个文件: qextserialbase.cpp和qextserialbase.h,qextserialport.cpp和qextserialport.h,win_qextseri alport.cpp和win_qextserialport.h 如果在Linux下只需将win_qextserialport.cpp和win_qextserialport.h 换为posix_qextserialpo rt.cpp和posix_qextserialport.h即可。 第一部分: 下面我们将讲述编程的详细过程,这里我们先给出完整的程序,然后到第二部分再进行逐句分析。 1.打开Qt Creator,新建Qt4 Gui Application,工程名设置为mycom,其他使用默认选项。(注意:建立的工程路径不能有中文。) 2.将上面所说的6个文件复制到工程文件夹下,如下图。
#include
case RAA: if (ch==0xaa) gRecState=RLEN; else if (ch==0x55) gRecState=RAA; else gRecState=R55; break; case RLEN: gRecLen=ch; gRecCount=0; gRecState=RDATA; break; case RDATA: RecBuf[gRecCount]=ch; gRecCount++; if (gRecCount>=gRecLen) { gRecState=RCH; } break; case RCH: temp=0; for(i=0;i 8.用C语言或汇编语言实现串口通信(PC和单片机间) 上位机和下位机的主从工作方式为工业控制及自动控制系统所采用。由于PC 机分析能力强、处理速度更快及单片机使用灵活方便等特点,所以一般都将PC 机作为上位机,单片机作为下位机,二者通过RS-232或者RS-485接收、发送数据和传送指令。单片机可单独处理数据和控制任务,同时也将数据传送给PC机,由PC机对这些数据进行处理或显示 1 硬件电路的设计 MCS-51单片机有一个全双工的串行通讯口UART,利用其RXD和TXD与外界进行通信,其内部有2个物理上完全独立的接收、发送缓冲器SBUF,可同时发送和接收数据。所以单片机和PC机之间可以方便地进行串口通讯。单片机串口有3条引线:TXD(发送数据),RXD(接收数据)和GND(信号地)。因此在通信距离较短时可采用零MODEM方式,简单三连线结构。IBM-PC机有两个标准的RS-232串行口,其电平采用的是EIA电平,而MCS-51单片机的串行通信是由TXD(发送数据)和RXD(接收数据)来进行全双工通信的,它们的电平是TTL电平;为了PC机与MCS-51 机之间能可靠地进行串行通信,需要用电平转换芯片,可以采用MAXIM公司生产的专用芯片MAX232进行转换。电路如图1所示。硬件连接时,可从MAX232中的2路发送器和接收器中任选一路,只要注意发送与接收的引脚对应关系即可。接口电路如图3.5所示。 总体设计按照整体设计思路方案绘制原理图如下所示: 2 系统软件设计 软件设计分上位机软件设计和下位机软件设计。这两部分虽然在不同的机器上编写和运行,但它们要做的工作是对应的:一个发送,另一个接收。为了保证数据通信的可靠性,要制定通信协议,然后各自根据协议分别编制程序。现约定通信协议如下:PC机和单片机都可以发送和接收。上位机和下位机均采用查询方式发送控字符和数据、中断方式接收控制字符和数据。采用RS-232串口异步通信, 1上位PC机与下位单片机异步串行通信的通信协议 51单片机串口通信,232通信,485通信,程序代码1:232通信 #include while(1) { if(flag==1) { ES=0; for(i=0;i<6;i++) { SBUF=table[i]; while(!TI); TI=0; } SBUF=a; while(!TI); TI=0; ES=1; flag=0; } } } void ser() interrupt 4 { RI=0; a=SBUF; flag=1; } 代码2:485通信 #include } void main() { init_1602(); init(); while(1) { if(flag==1) { display(0,a); } } } void ser() interrupt 4 { RI=0; a=SBUF; flag=1; } Love is not a maybe thing. You know when you love someone. Java的串口通信程序 首先需要到到sun主页下载串口通信的包,因为一般的jrd中不含有这个包的,有点补丁的意思。(CSDN上也有)。解压缩,为了使Java Communications API能够正确的与Windows系统交互,需要几个小的技巧。下面是三个很重要的文件,你可以从Sun的网站上下载得到 comm.jar win32com.dll https://www.doczj.com/doc/7613337815.html,m.properties 对于JVM来说,要正确的识别串口,将这几个文件放在系统中合适的位置使很重要的。 comm..jar应该放在以下目录中 %JAVA_HOME%/lib %JAVA_HOME%/jre/lib/ext win32com.dll应该放在以下目录中 %windir%system32 https://www.doczj.com/doc/7613337815.html,.properties应该放在以下目录中 %JAVA_HOME%/lib %JAVA_HOME%/jre/lib 你可以通过编译和运行Sun的例程来验证串口是否可以使用了。 JBuilder中安装安装Java Communication API (以下在JBuilder 2006中测试通过) 如果你使用JBuilder,那么还需要为JBuilder配置API。 一般来说,根据你的JBuilder配置,你也许需要将win32com.dll和 https://www.doczj.com/doc/7613337815.html,.properties安装到相应的目录中,可以参照上述的目录。例如,如果你使用JBuilder附带的JVM的话,你也许需要将win32com.dll和 https://www.doczj.com/doc/7613337815.html,.properties放到C:\Borland\JBuilder2006\jdk1.5的相应位置。 #include } void usart_init() //串口初始化 { INIT_OSC(); //InitPort(); INTCON=0 ; // 关闭所有的中断 TRISC6=0 ;//TX脚输出 TRISC7=1 ;//RX脚输入 RC6=1; RC7=1; //SPBRG=51;//波特率9600,6M时钟 SPBRG=51;//波特率9600,8M时钟 BRGH=1; //高速波特率 SYNC=0; SPEN=1; //异步串口工作方式 TXEN=1; //USART工作于发送器方式 TXIE=0; //发送不需要中断处理 RCIE=1; //接收需要中断处理 CREN=1; //激活接收器 PEIE = 1; GIE = 1; } void putch(unsigned char byte) //发送一个字节的数据{unsigned int t=0; TXREG = byte; for(t=0;t<50000;t++) { if(TRMT==1) { asm("nop"); break; } } } void main() //将上位机发送的数据通过串口显示{ 51 单片机的串口,是个全双工的串口,发送数据的同时,还可以接收数据。 当串行发送完毕后,将在标志位TI 置1,同样,当收到了数据后,也会在RI 置1。无 论RI 或TI 出现了1,只要串口中断处于开放状态,单片机都会进入串口中断处理程序。在中断程序中,要区分出来究竟是发送引起的中断,还是接收引起的中断,然后分别进行处理。 看到过一些书籍和文章,在串口收、发数据的处理方法上,很多人都有不妥之处。 接收数据时,基本上都是使用“中断方式”,这是正确合理的。 即:每当收到一个新数据,就在中断函数中,把RI 清零,并用一个变量,通知主函数, 收到了新数据。 发送数据时,很多的程序都是使用的“查询方式”,就是执行while(TI ==0); 这样的语句来 等待发送完毕。 这时,处理不好的话,就可能带来问题。 看了一些网友编写的程序,发现有如下几条容易出错: 1.有人在发送数据之前,先关闭了串口中断!等待发送完毕后,再打开串口中断。 这样,在发送数据的等待期间内,如果收到了数据,将不能进入中断函数,也就不会保存的这个新收到的数据。 这种处理方法,就会遗漏收到的数据。 2.有人在发送数据之前,并没有关闭串口中断,当TI = 1 时,是可以进入中断程序的。 但是,却在中断函数中,将TI 清零! 这样,在主函数中的while(TI ==0);,将永远等不到发送结束的标志。 3.还有人在中断程序中,并没有区分中断的来源,反而让发送引起的中断,执行了接收 中断的程序。 对此,做而论道发表自己常用的方法: 接收数据时,使用“中断方式”,清除RI 后,用一个变量通知主函数,收到新数据。 发送数据时,也用“中断方式”,清除TI 后,用另一个变量通知主函数,数据发送完毕。 这样一来,收、发两者基本一致,编写程序也很规范、易懂。 更重要的是,主函数中,不用在那儿死等发送完毕,可以有更多的时间查看其它的标志。 实例: 求一个PC 与单片机串口通信的程序,要求如下: 1、如果在电脑上发送以$开始的字符串,则将整个字符串原样返回(字符串长度不是固定的)。 #include 一、程序代码 #include TI = 0; } T_counter = 0; } uart_receive(void) interrupt 4 { if(RI) { RI = 0; indata[R_counter] = SBUF; R_counter++; if(R_counter>=4) { R_counter = 0; flag = 1; } } } void system_initial(void) { P1M1 = 0x00; P1M0 = 0xff; P1 = 0xff; //初始化为全部关闭 temp3 = 0x3f;//初始化temp3的值与六路输出的初始值保持一致 temp = 0xf0; R_counter = 0; T_counter = 0; } void initial_comm(void) { SCON = 0x50; //设定串行口工作方式:mode 1 ; 8-bit UART,enable ucvr TMOD = 0x21; //TIMER 1;mode 2 ;8-Bit Reload PCON = 0x80; //波特率不加倍SMOD = 1 TH1 = 0xfa; //baud: 9600;fosc = 11.0596 IE = 0x90; // enable serial interrupt TR1 = 1; // timer 1 RI = 0; TI = 0; ES = 1; EA = 1; } 在工业控制中,工控机(一般都基于Windows平台)经常需要与智能仪表通过串口进行通信。串口通信方便易行,应用广泛。 一般情况下,工控机和各智能仪表通过RS485总线进行通信。RS485的通信方式是半双工的,只能由作为主节点的工控PC机依次轮询网络上的各智能控制单元子节点。每次通信都是由PC机通过串口向智能控制单元发布命令,智能控制单元在接收到正确的命令后作出应答。 在Win32下,可以使用两种编程方式实现串口通信,其一是使用ActiveX 控件,这种方法程序简单,但欠灵活。其二是调用Windows的API函数,这种方法可以清楚地掌握串口通信的机制,并且自由灵活。本文我们只介绍API串口通信部分。 串口的操作可以有两种操作方式:同步操作方式和重叠操作方式(又称为异步操作方式)。同步操作时,API函数会阻塞直到操作完成以后才能返回(在多线程方式中,虽然不会阻塞主线程,但是仍然会阻塞监听线程);而重叠操作方式,API函数会立即返回,操作在后台进行,避免线程的阻塞。 无论那种操作方式,一般都通过四个步骤来完成: (1)打开串口 (2)配置串口 (3)读写串口 (4)关闭串口 (1)打开串口 Win32系统把文件的概念进行了扩展。无论是文件、通信设备、命名管道、邮件槽、磁盘、还是控制台,都是用API函数CreateFile来打开或创建的。该函数的原型为: HANDLE CreateFile( LPCTSTR lpFileName, DWORD dwDesiredAccess, DWORD dwShareMode, LPSECURITY_ATTRIBUTES lpSecurityAttributes, DWORD dwCreationDistribution, DWORD dwFlagsAndAttributes, HANDLE hTemplateFile); ?lpFileName:将要打开的串口逻辑名,如“COM1”; ?dwDesiredAccess:指定串口访问的类型,可以是读取、写入或二者并列; ?dwShareMode:指定共享属性,由于串口不能共享,该参数必须置为0; ?lpSecurityAttributes:引用安全性属性结构,缺省值为NULL; ?dwCreationDistribution:创建标志,对串口操作该参数必须置为OPEN_EXISTING; ?dwFlagsAndAttributes:属性描述,用于指定该串口是否进行异步操作,该值为FILE_FLAG_OVERLAPPED,表示使用异步的I/O;该值为0,表示同 步I/O操作; ?hTemplateFile:对串口而言该参数必须置为NULL; //****************************************************************// // DHT 使用范例 //单片机 AT89S5 或 STC89C5 RC // 功能 串口发送温湿度数据波特率 9600 //硬件连接 P .0口为通讯口连接DHT ,DHT 地电源和地连接单片机地 电源和地 单片机串口加MAX 3 连接电脑 // 公司 济南联诚创发科技有限公司 //****************************************************************// #include 51串口通信协议(新型篇) C51编程:这是网友牛毅编的一个C51串口通讯程序! //PC读MCU指令结构:(中断方式,ASCII码表示) //帧:帧头标志|帧类型|器件地址|启始地址|长度n|效验和|帧尾标志 //值: 'n' 'y'| 'r' | 0x01 | x | x | x |0x13 0x10 //字节数: 2 | 1 | 1 | 1 | 1 | 1 | 2 //求和: ///////////////////////////////////////////////////////////////////// //公司名称:*** //模块名:protocol.c //创建者:牛毅 //修改者: //功能描述:中断方式:本程序为mcu的串口通讯提供(贞结构)函数接口,包括具体协议部分 //其他说明:只提供对A T89c51具体硬件的可靠访问接口 //版本:1.0 //信息:QQ 75011221 ///////////////////////////////////////////////////////////////////// #include 单片机与pc串口通信程序及电路图 单片机与pc串口通信程序及电路图 #include #define BUFFERLEGTH 10 //----------------------------------------------------------------- void UART_init(); //串口初始化函数 void COM_send(void); //串口发送函数 char str[20]; char j; //------------------------------------------------------------------- void main(void) { unsigned char i; UART_init(); j=0; //初始化串口 for(i = 0;i }; while(1); } //------------------------------------------------------------- //-------------------------------------------------------------------------------------------------- // 函数名称:UART_init()串口初始化函数 // 函数功能:在系统时钟为11.059MHZ时,设定串口波特率为9600bit/s // 串口接收中断允许,发送中断禁止 //-------------------------------------------------------------------------------------------------- void UART_init() { //初始化串行口和波特率发生器 串口通信测试方法 1 关于串口通信的一些知识: RS-232C是目前最常用的串行接口标准,用来实现计算机和计算机之间、计算机和外设之间的数据通信。 在PC机系统中都装有异步通信适配器,利用它可以实现异步串行通信。而且MCS-51单片机本身具有一个全双工的串行接口,因此只要配以电平转换的驱动电路、隔离电路就可以组成一个简单可行的通信接口。 由于MCS-51单片机的输入和输出电平为TTL电平,而PC机配置的是RS-232C 标准串行接口,二者电气规范不一致,因此要完成PC机与单片机的数据通信,必须进行电平转换。 注明:3)RS-232C上传送的数字量采用负逻辑,且与地对称 逻辑1:-3 ~-15V 逻辑0:+3~+15V 所以与单片机连接时常常需要加入电平转换芯片: 2 实现串口通信的三个步骤: (1)硬件连接 51单片机有一个全双工的串行通讯口,所以单片机和计算机之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如计算机的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换。我们采用了三线制连接串口,也就是说和计算机的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。 使用MAX232串口通信电路图(9孔串口接头) (2)串行通信程序设计 ①通信协议的使用 通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种 约定,通信双方才能明白对方的意图,以进行下一步动作。假定我们需要在PC 机与单片机之间进行通信,在设计过程中,有如下约定: 串口通信协议程序 主机程序: /* 主机主要处理 : 主—>从 1.给从机发送命令 2.给从机发送数据 3.命令从机向主机发送数据 从—>主由中断程序处理根据从机发送过来的请求类型 0.请求主机发送命令(包括主到从的1,2命令) 1.请求主机接收数据 2,3保留 */ #include void delay(unsigned int i) { while(i--); } void init_uart(void) { TMOD=0x20; //定时器方式2--8位reload模式 TH1=0xfd; TL1=0xfd; PCON=0; //波特率不加倍 SCON=0xf0; //方式三 TB8=1; //发送地址时第九位为1 SM2=1; //接收到第九位为1时才能接收数据 TR1=1; //要在设置scon后开定时 ES=1; //开中断 EA=1; } //发送命令 void uart_send_cmd(uchar addr,uchar cmd)//uchar *date) { while(signal==0); //检查总线是否被占 signal=0; //占用总线 EA=0;//关中断 do { 主机程序: /* 主机主要处理: 主—>从 1.给从机发送命令 2.给从机发送数据 3.命令从机向主机发送数据 从—>主由中断程序处理根据从机发送过来的请求类型 0.请求主机发送命令(包括主到从的1,2命令) 1.请求主机接收数据 2,3保留 */ #include TR1=1; //要在设置scon后开定时 ES=1; //开中断 EA=1; } //发送命令 void uart_send_cmd(uchar addr,uchar cmd)//uchar *date) { while(signal==0); //检查总线是否被占 signal=0; //占用总线 EA=0;//关中断 do { do { SBUF=addr; //发送从机地址 while(TI!=1); TI=0; } while(RI!=1); //一直等待从机响应 //while循环里可加入出错处理temp_addr=SBUF; RI=0; } while(temp_addr!=addr); //一直等到从机回应的地址相同 //while循环里可加入出错处理 TB8=0; //发送数据第9位为0 // SM2=0; // 接收到第九位为1时才置位RI //每次一个数据 SBUF=cmd; while(TI!=1); TI=0; TB8=1; // SM2=1; RI=0; TI=0; //不处理期间发生的中断 EA=1; signal=1; //释放总线 }汇编语言实现串口通信(PC和单片机间)教学文案
51单片机串口通信,232通信,485通信,程序
Java串口通信程序(程序及注释) 可编译运行
PIC16f串口通信程序
单片机串口通信的发送与接收(可编辑修改word版)
51单片机usart通信程序(有CRC校验)
单片机串口通信C程序及应用实例
VC++串口通信编程
【最新编排】基于51单片机的DHT11串口通讯
51串口通信协议(新型篇)
单片机与pc串口通信程序及电路图
串口通信测试方法
串口通信协议程序
串口通信协议程序
相关主题
文本预览