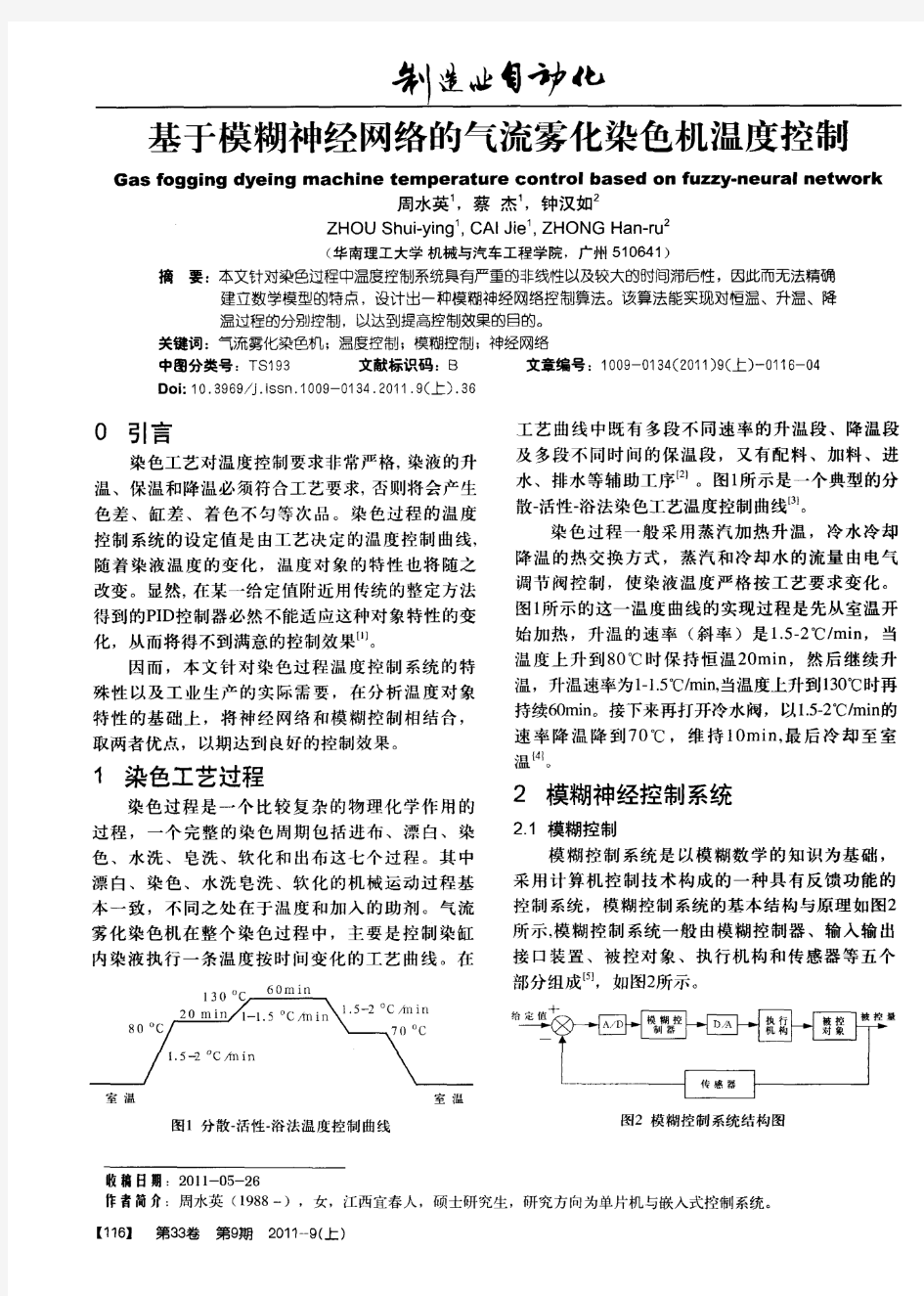
前馈神经网络 前馈神经网络的结构一般包含输入层、输出层、及隐含层,隐含层可以是一层或多层。各神经元只接收前一层的输出作为自己的输入,并且将其输出给下一层,整个网络中没有反馈。每一个神经元都可以有任意多个输入,但只允许有一个输出。图1选择只含一个隐含层的前馈神经网络。其原理框图如图1所示。 图中,只有前向输出,各层神经元之间的连接用权值表示。设输入层有M 个输入信号,其中任一输入信号用i ()M i ,2,1 =表示;隐含层有N 个神经元,任一隐含层神经元用j ()N j ,2,1 =表示;输入层与隐含层间的连接权值为()n w ij , ()N j M i ,2,1;,2,1 ==;隐含层与输出层的连接权值为()n w j 。假定隐含层神 经元的输入为()n u j ,输出为()n v j ;输出层神经元的输入为()n o ,网络总输出为 ()n x ~。则此神经网络的状态方程可表示为: ()()()∑+-==M i ij j i n y n w n u 11 ()()[] ()()?? ? ???∑+-===M i ij j j i n y n w f n u f n v 11 ()()()∑==N j j j n v n w n o 1 ()()[]()()?? ????==∑=N j j j n v n w f n o f n x 1~ 图1 三层前馈神经网络结构图 输入层 隐含层 输出层 (y n (1y n -(1y n M -+
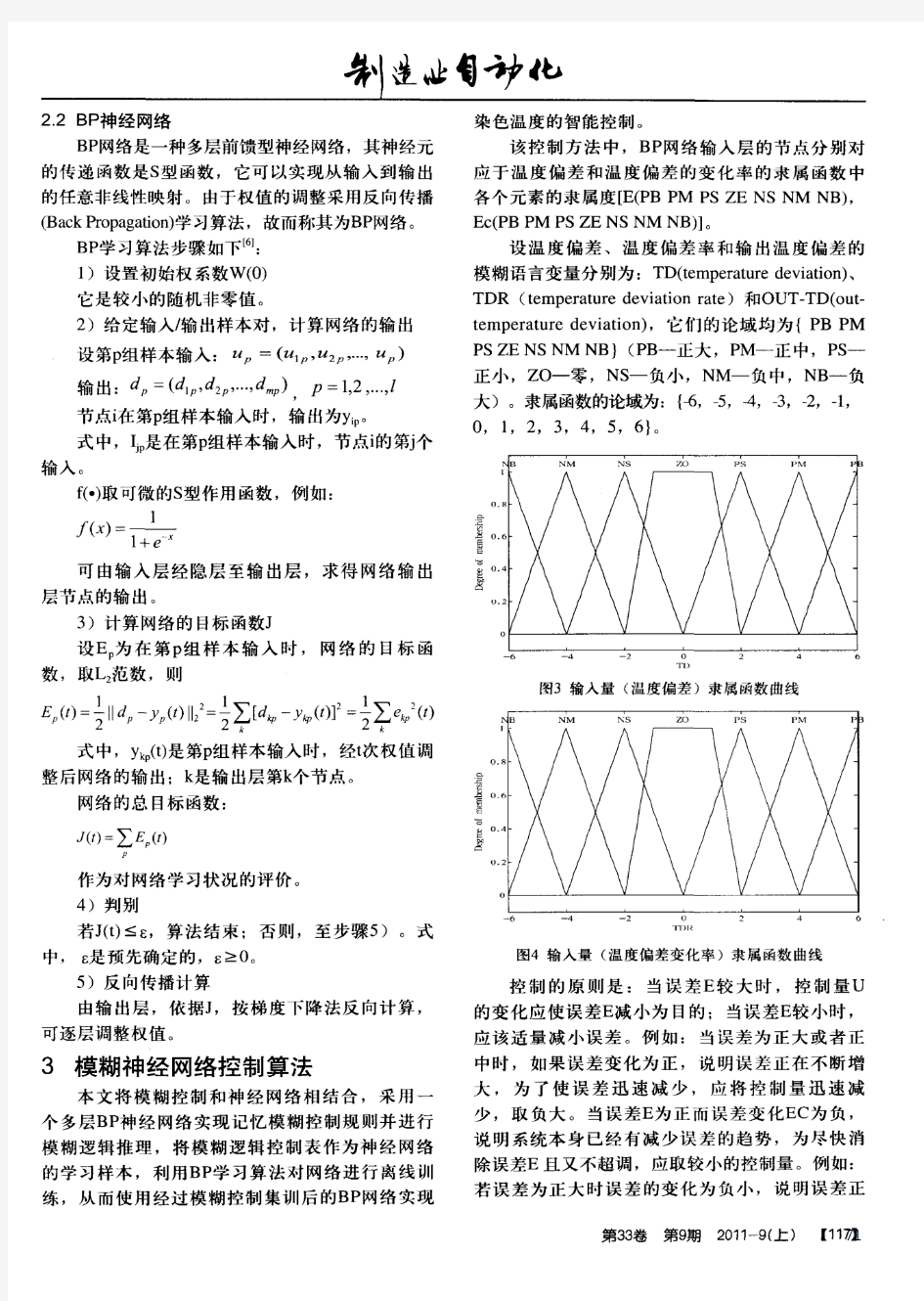
式中,()?f 表示隐含层、输出层的输入和输出之间的传递函数,也称为激励函数。 定义代价函数为瞬时均方误差: ()()()()[] ()()()2 12 2~?? ? ????? ????????-=-==∑=N j j j n v n w f n d n x n d n e n J 式中,()n d 为训练信号。 递归神经网络 对角递归神经网络 图2为典型的对角递归神经网络,它具有三层结构,分别为输入层,隐层和输出层,在隐层的权值叠加中,引入了输入的前一时刻的输出作为反馈控制信号。选用这种网络的优点是结构简单,易于实现,可以直观的体现反馈神经网络的结构模式和工作方式。 设输入层与隐层间的连接权值为()n w h ij ()k j m i ,2,1;,,1,0==,隐层与输 出层之间的权值为()n w o j ,递归层的权值为()n w d j 。设输入层的输入为()i n y -, 隐层的输入为()n u j ,输出为()n I j ,输出层的输入为()n v ,输出层的输出为()n x ~,则对角递归神经网络的状态方程为 ()()()()()10-+-=∑=n I n w i n y n w n u j d j m i h ij j 输入层 输出层 隐层 图2 对角递归神经网络的结构 ()y n ()1y n - ()1y n m -+ ()y n m - mj d
模糊神经网络技术研究的现状及展望 摘要:本文对模糊神经网络技术研究的现状进行了综述,首先介绍了模糊控制技术和神经网络技术的发展,然后结合各自的特点讨论了模糊神经网络协作体的产生以及优越性,接着对模糊神经网络的常见算法、结构确定、规则的提取等进行了阐述,指出了目前模糊神经网络的研究发展中还存在的一些问题,并对模糊神经网络的发展进行了展望。 关键字:模糊控制;神经网络;模糊神经网络 引言 系统的复杂性与所要求的精确性之间存在尖锐的矛盾。为此,通过模拟人类学习和自适应能力,人们提出了智能控制的思想。控制理论专家Austrom(1991)在IFAC大会上指出:模糊逻辑控制、神经网络与专家控制是三种典型的智能控制方法。通常专家系统建立在专家经验上,并非建立在工业过程所产生的操作数据上,且一般复杂系统所具有的不精确性、不确定性就算领域专家也很难把握,这使建立专家系统非常困难。而模糊逻辑和神经网络作为两种典型的智能控制方法,各有优缺点。模糊逻辑与神经网络的融合——模糊神经网络由于吸取了模糊逻辑和神经网络的优点,避免了两者的缺点,已成为当今智能控制研究的热点之一了。 1 模糊神经网络的提出 模糊集理论由美国著名控制论专家L.A.Zadeh于1965年创立[1]。1974年,英国著名学者E.H.Mamdani将模糊逻辑和模糊语言用于工业控制,提出了模糊控制论。至今,模糊控制已成功应用在被控对象缺乏精确数学描述及系统时滞、非线性严重的场合。 人工神经网络理论萌芽于上世纪40年代并于80年代中后期重掀热潮,其基本思想是从仿生学的角度对人脑的神经系统进行功能化模拟。人工神经网络可实现联想记忆,分类和优化计算等功能,在解决高度非线性和严重不确定系统的控制问题方面,显示了巨大的优势和潜力模糊控制系统与神经网络系统具有整体功能的等效性[2],两者都是无模型的估计器,都不需要建立任何的数学模型,只需要根据输入的采样数据去估计其需要的决策:神经网络根据学习算法,而模糊控制系统则根据专家提出的一些语言规则来进行推理决策。实际上,两者具有相同的正规数学特性,且共享同一状态空间[3]。 另一方面,模糊控制系统与神经网络系统具有各自特性的互补性[。神经网络系统完成的是从输入到输出的“黑箱式”非线性映射,但不具备像模糊控制那样的因果规律以及模糊逻辑推理的将强的知识表达能力。将两者结合,后者正好弥补前者的这点不足,而神经网络的强大自学习能力则可避免模糊控制规则和隶属函数的主观性,从而提高模糊控制的置信度。因此,模糊逻辑和神经网络虽然有着本质上的不同,但由于两者都是用于处理不确定性问题,不精确性问题,两者又有着天然的联系。Hornik和White(1989)证明了神经网络的函数映射能力[4];Kosko(1992)证明了可加性模糊系统的模糊逼近定理(FAT,Fuzzy Approximation Theorem)[5];Wang和Mendel(1992)、Buckley和Hayashi(1993)、Dubots和Grabish(1993)、Watkins(1994)证明了各种可加性和非可加性模糊系统的模糊逼近定理[6]。这说明模糊逻辑和神经网络有着密切联系,正是由于这类理论上的共性,才使模糊逻辑和神经网络的结合成为可能。 2 模糊神经网络的学习算法 各种类型的模糊神经网络学习算法的共同方面是结构学习和参数学习两部分。结构学习是指按照一定的性能要求确定模糊系统的推理规则的条数,每条规则的前提和结论的隶属度函数以及由清晰化得到具体的规则数。参数学习是指进一步细化各隶属函数的参数以及模糊规则的其他参数,以使系统达到最优。结构学习主要是从输入输出数据中提取规则或由输入空间模糊划分获得规则,主要有启发式搜索、模糊网格法、树形划分法、基于模糊聚类的学习算
基于神经网络的专家系统 摘要:人工神经网络与专家系统,作为人工智能应用的两大分支,在实际应用中都有许多成功的范例,但作为单个系统来讲,二者都存在很大的局限性。主要是专家系统知识获取的“瓶颈问题”和神经网络知识表达的“黑箱结构”。为解决这个问题,本文提出将专家系统与神经网络技术集成,达到优势互补的目的。利用神经网络优良的自组织、自学习和自适应能力来解决令家系统知识获取的困难,同时用专家系统良好的解释机能来弥补神经网络中知识表达的缺陷。论文提出了基于神经网络专家系统的结构模型,知识表示方式以及推理机制等。 关键词:专家系统;神经网络;系统集成; 0 引言 专家系统(Expert System)是一种设计用来对人类专家的问题求解能力建模的计算机程序。专家系统是一个智能计算机程序,其内部含有大量的某个领域专家水平的知识和经验,能够利用人类专家的知识和解决问题的方法来处理该领域问题。一个专家系统应具有以下三个基本特征:启发性——不仅能使用逻辑性知识还能使用启发性知识;透明性——能向用户解释它们的推理过程,还能回答用户的一些问题;灵活性——系统中的知识应便于修改和扩充;推理性——系统中的知识必然是一个漫长的测试,修改和完善过程。专家系统是基于知识的系统。它由如图1所示的5个基本的部分组成[1,2,3]。 知识库存储从专家那里得到的特定领域的知识,这些知识包括逻辑性的知识和启发性知识两类。数据库用于存放专家系统运行过程中所需要和产生的信息。推理机的作用是按照一定的控制策略,根据用户提出的问题和输入的有关数据或信息,按专家的意图选择利用知识库的知识,并进行推理,以得到问题的解答,它是专家系统的核心部分。人机接口部分的功能是解释系统的结论,回答用户的问题,它是连接用户与专家系统之间的桥梁。知识的获取是为修改知识库原有的知识和扩充知识提供的手段。 1 传统专家系统存在的问题 传统专家系统是基于知识的处理的系统,将领域知识整理后形式化为一系列系统所能接受并能存储的形式,利用其进行推理实现问题的求解。尽管与人类专家相比,专家系统具有很大的优越性。但是,随着专家系统应用的日益广泛及所处理问题的难度和复杂度的不断扩大和提高,专家系统在某些方面已不能满足是实际工作中的需求,具体体现在以下一个方面[1,2]:(1)知识获取的“瓶颈”问题。(2)知识获取的“窄台阶”。(3)缺乏联想功能、推理能力弱。(4)智能水平低、更谈不上创造性的知识。(5)系统层次少。(6)实用性差。 2 神经网络与传统专家系统的集成 神经网络是基于输入\输出的一种直觉性反射,适用于进行浅层次的经验推理,其特点是通过数值计算实现推理;专家系统是基于知识匹配的逻辑推理,是深层次的符号推理。将两者科学的结合形成神经网络专家系统,可以取长补短。根据侧重点的不同,神经网络与专家系统的集成有三种模式[2]:(1)神经网络支持专家系统。以传统的专家系统为主,以神经网络的有关技术为辅。 (2)专家系统支持神经网络。以神经网络的有关技术为核心,建立相应领域的专家系统,采用专家系统的相关技术完成解释等方面的工作。 (3)协同式的神经网络专家系统。针对大的复杂问题,将其分解为若干子问题,针对每个子问题的特点,选择用神经网络或专家系统加以实现,在神经网络和专家系统之间建立一种耦合关系。
关于学习神经网络监督(学习)控制的一点心得 神经网络控制是一种基本上不依赖于精确数学模型的先进控制方法,比较适用于那些具有不确定性或高度非线性的控制对象,并具有较强的适应和学习能力。[1] 人工神经元网络是在生物神经元模型基础上发展而来的。生物神经元模型的基本组成单元是单个的神经元,它有着接受、传导信息的功能。其中最重要的一点是生物神经元能接受多个神经元传递的信息,并能将其往下传递给多个神经元。根据其特点抽象出的最典型的人工神经元模型如下图所示: 从图中易知其数学模型为: ∑∑===-=n i i ji j n i i ji j x w f x w f y 01)()(θ ,( 100-==j j w x ,θ) 式中,j θ是阈值, ji w 是连接权系数;f (·)为输出变换函数。 人工神经网络是由多个人工神经元组成,每个神经元有多个输入连接通路,但只有一个单一的输出,但是它可以连接到很多其他的神经元。经过多个神经元的串、并连接,就可以构成神经网络。依据神经元的图形模型和数学模型可以知道神经网络具有如下性质: 1) 对于每个节点有一个状态变量j x ; 2) 节点i 到节点 j 有一个连接权系数ji w ; 3) 对于每一个节点有一个阈值j θ; 4) 对于每个节点定义一个变换函数f j [x i ,w ji ,j θ( i ≠j )]。[1] 单个神经元的输出乘以连接权系数即是下一个神经元的输入。对于一个神经网络,当确定了各节点的输出变换函数后,连接权值将作为变量,神经网络的学习功能旨在通过调整连接权值以达到给定输入下得到目标输出的目的,但实际情况只能是接近目标输出。 神经网络的学习基本方式如下:通过给定的输入得到实际输出值,然后记录到目标输出与实际输出的差值,想减小综合差值的方向调整连接权值,这样依次进行下去,最后得到一组最优的连接权集合。当神经网络的节点越多,其能识别的模式也越多,但训练的运算量也相应的增加,这就对训练样本的选择提出更高的要求。 神经元网络监督控制系统的基本系统框图如下:
神经网络预测控制综述 摘要:近年来,神经网络预测控制在工业过程控制中不仅得到广泛的应用,而且其理论研究也取得了很大进展。对当前各种神经刚络预测控制方法的现状及其工业应用进行了较深入地分析,并对其存在的问题和今后可能的发展趋势作了进一步探讨。 关键词:神经网络;预测控制:非线性系统;工业过程控制 Abstract: In recent years, neural network predictive control has not only been widely used in industrial process control, but also has made great progress in theoretical research. The current status of various neural network prediction control methods and their industrial applications are analyzed in depth, and the existing question and possible future development trends are further discussed. Keywords: neural network; predictive control: nonlinear system; industrial process control
20世纪70年代以来,人们从工业过程的特点出发,寻找对模型精度要去不高而同样能实现高质量控制性能的方法,预测控制就是在这种背景下发展起的[1]。预测控制技术最初山Richalet和Cutler提出[2],具有多步预测、滚动优化、反馈校正等机理,因此能够克服过程模型的不确定性,体现出优良的控制性能,在工业过程控制中取得了成功的应用。如Shell公司、Honeywell公司、Centum 公司,都在它们的分布式控制系统DCS上装备了商业化的预测控制软件包.并广泛地将其应用于石油、化工、冶金等工业过程中[3]。但是,预测函数控制是以被控对象的基函数的输出响应可以叠加为前提的,因而只适用于线性动态系统控制。对于实际中大量的复杂的非线性工业过程。不能取得理想的控制效果。而神经网络具有分布存储、并行处理、联想记忆、自组织和自学习等功能,以神经元组成的神经网络可以逼近任意的:线性系统。使控制系统具有智能化、鲁棒性和适应性,能处理高维数、非线性、干扰强、难建模的复杂工业过程。因此,将神经网络应用于预测控制,既是实际应用的需要,同时也为预测控制理论的发展开辟了广阔的前景。本文对基于神经网络的预测控制的研究现状进行总结,并展望未来的发展趋势。 l神经网络预测控制的基本算法的发展[4] 实际中的控制对象都带有一定的菲线性,大多数具有弱非线性的对象可用线性化模型近似,并应用已有的线性控制理论的研究成果来获得较好的控制效果。而对具有强非线性的系统的控制则一直是控制界研究的热点和难点。 就预测控制的基本原理而言,只要从被控对象能够抽取出满足要求的预测模型,它便可以应用于任何类型的系统,包括线性和非线性系统。 由于神经网络理论在求解非线性方面的巨大优势,很快被应用于非线性预测控制中。其主要设计思想是:利用一个或多个神经刚络,对非线性系统的过程信息进行前向多步预测,然后通过优化一个含有这些预测信息的多步优化目标函数,获得非线性预测控制律。在实际应用与理论研究中形成了许多不同的算法。如神经网络的内模控制、神经网络的增量型模型算法控制等,近来一些学者对有约束神经网络的预测控制也作了相应的研究。文献[5]设计了多层前馈神经网络,使控制律离线求解。文献[6]采用两个网络进行预测,但结构复杂,距离实际应用还有一定的距离,文献[7]利用递阶遗传算法,经训练得出离线神经网络模型.经多步预测得出对象的预测模型,给出了具有时延的非线性系统的优化预测控制。将神经网络用于GPC的研究成果有利用Tank.Hopfield网络处理GPC矩阵求逆的算法,基于神经网络误差修正的GPC算法、利用小脑模型进行提前计算的GPC 算法、基于GPC的对角递归神经网络控制方法以及用神经网络处理约束情形的预
摘要 现代化的建设需要信息技术的支持,专家系统是一种智能化的信息技术,它的应用改变了过去社会各领域生产基层领导者决策的盲目性和主观性,缓解了我国各领域技术推广人员不足的矛盾,促进了社会的持续发展。但传统专家系统只能处理显性的表面的知识,存在推理能力弱,智能水平低等缺点,所以本文引入了神经网络技术来克服传统专家系统的不足,来试图解决专家系统中存在的关系复杂、边界模糊等难于用规则或数学模型严格描述的问题。本文采用神经网络进行大部分的知识获取及推理功能,将网络输出结果转换成专家系统推理机能接受的形式,由专家系统的推理机得到问题的最后结果。最后,根据论文中的理论建造了棉铃虫害预测的专家系统,能够准确预测棉铃虫的发病程度,并能给用户提出防治建议及措施。有力地说明了本论文中所建造的专家系统在一定程度上解决了传统专家系统在知识获取上的“瓶颈”问题,实现了神经网络的并行推理,神经网络在专家系统中的应用具有较好的发展前景。 关键词神经网络专家系统推理机面向对象知识获取
Abstract Modern construction needs the support of IT, expert system is the IT of a kind of intelligence, its application has changed past social each field production subjectivity and the blindness of grass-roots leader decision-making, have alleviated the contradiction that each field technical popularization of our country has insufficient people, the continued development that has promoted society. But traditional expert system can only handle the surface of dominance knowledge, existence has weak inference ability, intelligent level is low, so this paper has led into artificial neural network technology to surmount the deficiency of traditional expert system, attempt the relation that solution has in expert system complex, boundary is fuzzy etc. are hard to describe strictly with regular or mathematics model. This paper carries out the most of knowledge with neural network to get and infer function , changes network output as a result into expert system, inference function the form of accepting , the inference machine from expert system gets the final result of problem. Finally, have built the expert system of the cotton bell forecast of insect pest according to the theory in this thesis, can accurate forecast cotton bell insect become sick degree, and can make prevention suggestion and measure to user. Have proved on certain degree the expert system built using this tool have solved traditional expert system in knowledge the problem of " bottleneck " that gotten , the parallel inference that has realized neural network, Neural network in expert system application has the better prospect for development. Key words Neural network Expert system Reasoning engine Object-orientation Knowledge acquisition
clear all; close all; xite=0.50; alfa=0.05; w2=rand(6,1); w2_1=w2;w2_2=w2; w1=rand(2,6); w1_1=w1;w1_2=w1; dw1=0*w1; x=[0,0]'; u_1=0; y_1=0; I=[0,0,0,0,0,0]'; Iout=[0,0,0,0,0,0]'; FI=[0,0,0,0,0,0]'; ts=0.001; for k=1:1:1000 time(k)=k*ts; u(k)=0.50*sin(3*2*pi*k*ts); a(k)=1.2*(1-0.8*exp(-0.1*k)); y(k)=a(k)*y_1/(1+y_1^2)+u_1; for j=1:1:6 I(j)=x'*w1(:,j); Iout(j)=1/(1+exp(-I(j))); end yn(k)=w2'*Iout; e(k)=y(k)-yn(k); w2=w2_1+(xite*e(k))*Iout+alfa*(w2_1-w2_2); for j=1:1:6 FI(j)=exp(-I(j))/(1+exp(-I(j)))^2; end
for i=1:1:2 for j=1:1:6 dw1(i,j)=e(k)*xite*FI(j)*w2(j)*x(i); end end w1=w1_1+dw1+alfa*(w1_1-w1_2); x(1)=u(k); x(2)=y(k); w1_2=w1_1;w1_1=w1; w2_2=w2_1;w2_1=w2; u_1=u(k); y_1=y(k); end figure(1); plot(time,y,'r',time,yn,'b'); xlabel('times');ylabel('y and yn'); grid on ts=0.1; for k=1:1:200 time(k)=k*ts; u(k)=1; a(k)=1.2*(1-0.8*exp(-0.1*k)); y(k)=a(k)*y_1/(1+y_1^2)+u_1; for j=1:1:6 I(j)=x'*w1(:,j); Iout(j)=1/(1+exp(-I(j))); end yn(k)=w2'*Iout; e(k)=y(k)-yn(k); w2=w2_1+(xite*e(k))*Iout+alfa*(w2_1-w2_2); for j=1:1:6 FI(j)=exp(-I(j))/(1+exp(-I(j)))^2; end for i=1:1:2
模糊神经网络的基本原理与应用概述 摘要:模糊神经网络(FNN)是将人工神经网络与模糊逻辑系统相结合的一种具有强大的自学习和自整定功能的网络,是智能控制理论研究领域中一个十分活跃的分支,因此模糊神经网络控制的研究具有重要的意义。本文旨在分析模糊神经网络的基本原理及相关应用。 关键字:模糊神经网络,模糊控制,神经网络控制,BP算法。 Abstract:A fuzzy neural network is a neural network and fuzzy logic system with the combination of a powerful. The self-learning and self-tuning function of the network, is a very intelligent control theory research in the field of active branches. So the fuzzy neural network control research has the vital significance. The purpose of this paper is to analysis the basic principle of fuzzy neural networks and related applications. Key Words: Fuzzy Neural Network, Fuzzy Control, Neural Network Control, BP Algorithm.
1人工神经网络的基本原理与应用概述 人工神经网络的概念 人工神经网络(Artificial Neural Network,简称ANN)是由大量神经元通过极其丰富和完善的联接而构成的自适应非线性动态系统,它使用大量简单的相连的人工神经元来模仿生物神经网络的能力,从外界环境或其它神经元获得信息,同时加以简单的运算,将结果输出到外界或其它人工神经元。神经网络在输入信息的影响下进入一定状态,由于神经元之间相互联系以及神经元本身的动力学特性,这种外界刺激的兴奋模式会自动地迅速演变成新的平衡状态,这样具有特定结构的神经网络就可定义出一类模式变换即实现一种映射关系。由于人工神经元在网络中不同的联接方式,就形成了不同的人工神经网络模式,其中误差反向传播网络(Back-Propagation Network,简称BP网络)是目前人工神经网络模式中最具代表性,应用得最广泛的一种模型【1,2】。 人工神经网络研究的发展简史 人工神经网络的研究己有近半个世纪的历史但它的发展并不是一帆风顺的,神经网络的研究大体上可分为以下五个阶段[3]。 (1) 孕育期(1956年之前):1943年Mcculloch与Pitts共同合作发表了“A logical calculus of ideas immanent in Nervous Activity”一文,提出了神经元数学模型(即MP模型)。1949年Hebb提出Hebb学习法则,对神经网络的发展做出了重大贡献。可以说,MP模型与学习规则为神经科学与电脑科学之间架起了沟通的桥梁,也为后来人工神经网络的迅速发展奠定了坚实的基础。 (2)诞生期(1957年一1968年):1960年Widrow提出了自适应线性元件模型,Rossenbaltt在1957年提出了第一种人工神经网络模式一感知机模式,由二元值神经元组成,该模式的产生激起了人工神经网络研究的又一次新高潮。(3)挫折期(1969年一1981年):1969年Minsky等人写的《感知机》一书以数学方法证明了当时的人工神经网络模式的学习能力受到很大限制。之后,人工神经网络的研究一直处于低潮。
比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题 一、专家系统(Expert System) 1,什么是专家系统? 在日常生活中大家所认知的“专家”一般都拥有某一特定领域的大量专业知识,以及丰富的实际经验。在解决问题时,专家们通常拥有一套独特的思维方式,能较圆满地解决一类困难问题,或向用户提出一些建设性的建议等。 专家系统一般定义为一个具有智能特点的计算机程序。 它的智能化主要表现为能够在特定的领域内模仿人类专家思维来求解复杂问题。因此,专家系统必须包含领域专家的大量知识,拥有类似人类专家思维的推理能力,并能用这些知识来解决实际问题。 专家系统的基本结构如图1所示,其中箭头方向为数据流动的方向。 图1 专家系统的基本组成 专家系统通常由知识库和推理机两个主要组成要素。 知识库存放着作为专家经验的判断性知识,例如表达建议、 推断、 命令、 策略的产生式规则等, 用于某种结论的推理、 问题的求解,以及对于推理、 求解知识的各种控制知识。 知识库中还包括另一类叙述性知识, 也称作数据,用于说明问题的状态,有关的事实和概念,当前的条件以及常识等。
专家系统的问题求解过程是通过知识库中的知识来模拟专家的思维方式的,因此,知识库是专家系统质量是否优越的关键所在,即知识库中知识的质量和数量决定着专家系统的质量水平。一般来说,专家系统中的知识库与专家系统程序是相互独立的,用户可以通过改变、完善知识库中的知识内容来提高专家系统的性能。 推理机实际上是一个运用知识库中提供的两类知识,基于木某种通用的问题求解模型,进行自动推理、 求解问题的计算机软件系统。 它包括一个解释程序, 用于决定如何使用判断性知识推导新的知识, 还包括一个调度程序, 用于决定判断性知识的使用次序。 推理机的具体构造取决于问题领域的特点,及专家系统中知识表示和组织的方法。 推理机针对当前问题的条件或已知信息,反复匹配知识库中的规则,获得新的结论,以得到问题求解结果。在这里,推理方式可以有正向和反向推理两种。正向推理是从前件匹配到结论,反向推理则先假设一个结论成立,看它的条件有没有得到满足。由此可见,推理机就如同专家解决问题的思维方式,知识库就是通过推理机来实现其价值的。 人机界面是系统与用户进行交流时的界面。通过该界面,用户输入基本信息、回答系统提出的相关问题,并输出推理结果及相关的解释等。 综合数据库专门用于存储推理过程中所需的原始数据、中间结果和最终结论,往往是作为暂时的存储区。解释器能够根据用户的提问,对结论、求解过程做出说明,因而使专家系统更具有人情味。 知识获取是专家系统知识库是否优越的关键,也是专家系统设计的“瓶颈”问题,通过知识获取,可以扩充和修改知识库中的内容,也可以实现自动学习功能。 2,专家系统的特点 在功能上, 专家系统是一种知识信息处理系统, 而不是数值信息计算系统。在结构上, 专家系统的两个主要组成部分 – 知识库和推理机是独立构造、分离组织, 但又相互作用的。在性能上, 专家系统具有启发性, 它能够运用专家的经验知识对不确定的或不精确的问题进行启发式推理, 运用排除多余步骤或减少不必要计算的思维捷径和策略;专家系统具有透明性, 它能够向用户显示为得出某一结论而形成的推理链, 运用有关推理的知识(元知识)检查导出结论的精度、一致性和合理性, 甚至提出一些证据来解释或证明它的推理;专家系统具有灵活性, 它能够通过知识库的扩充和更新提高求解专门问题的水平或适应环境对象的某些变化,通过与系统用户的交互使自身的性能得到评价和监护。 3,专家系统适合解决的实际问题 专家系统是人工智能的一个应用,但由于其重要性及相关应用系统之迅速发展,它已是信息系统的一种特定类型。专家系统一词系由以知识为基础的专家系统(knowledge-based expert system)而来,此种系统应用计算机中储存的人类知识,解决一般需要用到专家才能处理的问题,它能模仿人类专家解决特定问题时的推理过程,因而可供非专家们用来增进问题解决的能力,同时专家们也可把它视为具备专业知识的助理。由于在人类社会中,专家资源确实相当稀少,有了专家系统,则可使此珍贵的专家知识获得普遍的应用。 专家系统技术广泛应用在工程、科学、医药、军事、商业等方面,而且成果相当丰硕,甚至在某些应用领域,还超过人类专家的智能与判断。其功能应用领
摘要:本文讨论了基于李雅普诺夫方法分析神经网络控制系统的稳定性。首先,文章指出神经网络系统的动态可以由视为线性微分包含(LDI)的一类非线性系统表示。其次,对于这类非线性系统的稳定条件是推导并利用单神经系统和反馈神经网络控制系统的稳定性分析。此外,用图形方式显示非线性系统参数位置的这种参数区域表示方法(PR)提出了通过引入新的顶点和最小值的概念。从这些概念上可以推导出一个能有效地找到李雅普诺夫函数的重要理论。单个神经的神经系统的稳定性标准时由参数区域来决定的。最后,分析了包括神经网络设备和神经网络控制器为代表的神经网络控制系统的稳定性。 1.介绍 最近,已经有很多关于神经网络的自适应控制的研究,例如:在机器人领域,川户提出了一种使用的学习控制系统,控制系统的一项关键指标就是他的稳定性,然而分析像基于神经网络的控制系统这样的非线性系统的稳定性是非常难的。 Nguyen和Widrow 设计了一种在电脑上模拟卡车拖车的神经网络控制器。这个设计主要分为两大部分。第一部分是通过神经网络来学习设备的动态,这一部分被称为“仿真器”。第二部分是通过最小化的性能函数来计算出神经网络网络控制器的参数(权值)。但是,他们没有分析神经网络控制系统的稳定性。一项稳定性分析标准工具讲有利于神经网络控制应用到许多实际问题中。 最近,这类可被视为线性微分包含(LDI)的非线性系统的稳定条件已经被作者推导出来,再引用的[7][8]中讨论了。其中一项保证LDI稳定的充分条件与李雅普诺夫稳定性定理是相一致的。本文应用LDI的稳定条件和Nguyen与Widrow的方法来分析神经网络系统的稳定性。文中选取了一种代表神经网络状态的方法。此外,我们表明包含由近似于神经网络设备和神经网络控制器组成的神经网络反馈控制系统也可以分析神经网络是否能稳定。这意味着,本文提出的稳定条件可以分析神经网络反馈控制系统。本文的构成如下:第二节展示了一种文中的神经网络系统。第三节给出了LDI的稳定条件。第四节提出了一个以图形方式显示LDI参数的参数区域表示方法(PR)并推导出一个有效导出李雅普诺夫函数的重要定理。第五节阐述了神经网络系统的LDI表示方法。第六节介绍了用PR方法表示单神经系统和神经网络反馈系统的稳定标准。 2.神经控制系统 假设一个神经网络函数是 x(k + I) =P( x ( k )u, (k)), 他的神经网络反馈控制系统的函数是:x(k + 1) = P(x(k),u(k)) 和 u(k) = C(x(k)),其中x(k)是实属范围内的状态向量,u(k)是实属范围内的输入向量。P和C分别表示神经网络设备和神经网络控制器的非线性传递函数。如图1,显示了一个单一的神经网络系统和神经网络反馈控制系统。假设每个神经元的输出函数f ( u )都是可微分的,在k > 0的情况下,我们可以得到:f ( 0 ) = 0, f(v)∈[-k,k],对于所有的v都成立 此外,假设所有的传递权重都已经被学习方法所确定了,例如反向传播神经网络在神经网络控制稳定性分析之前。在一个单一的神经网络系统中,因为我们分析神经网络系统的动态平衡稳定性,所以设定. u(k) = 0。