TPMS 设计的关键技术思考与电路实现
唐志辉,李洪超,陈振伟
(东莞理工学院城市学院计算机与信息科学系,广东东莞 523106)
摘要:探讨了直接式胎压监控系统(TP M S )设计的关键技术,设计了一种基于智能传感器SP12及低功耗、收发一体的射频芯片nRF905的TP M S,详细地介绍了系统的电路结构,重点分析了其功耗、测量精度、可靠性等主要性能指标。经试验测试表明,测量精度、功耗达到实际应用要求,可靠性高。
关键词:TPMS ;智能传感器;电路设计;低功耗
中图分类号:TP277;U463.34 文献标识码:B 文章编号:1006-0006(2010)05-0027-03
Key Technol o gy Cons i d erati o n and C ircuit I m p l e ment ati o n of TPMS
TANG Zhi -hui ,LI H ong-chao ,C HEN Zhen-w ei
(D epart m ent o f Compu ter and Infor m a tion Sc i ence ,C ity Co ll ege of D ongguan U niversity of T echno logy ,D ongguan 523106,Ch i na)
Abstr ac:t T he tex t d i scussed t he key techno l ogy o f T P M S(T ire Pressure M onito ri ng Syste m ),and A kind o f d irect
T P M S w as prov i ded .The T P M S w as based on the i nte lli gent sensor SP12and the l ow power consu m pti on I C nRF905i n wh i ch rece i ver and trans m itter were i ntegrated .T he text i ntroduced the deta iled c ircu it ,and focused on the analysis of m ain perfor m ances such as po w er consu m pti on ,m easure m ent prec isi on ,re liab ility etc .A cco rd i ng to the testi ng ,t he system s m ain perfor m ances can m eet actua l de m ands ,and have the character i stic of high re li ability .
Key wor ds :TP M S ;Inte lli gent sensor ;C ircuit desi gn ;Low powe r consu mption
环保、节能、安全是当今汽车发展的热点问题。汽车轮胎压力监测系统(T ire P ressureM on i tori ng Syste m 简称TP M S )是汽车安全和故障诊断系统中主要的汽车安全报警设备。TP M S 是一种能够实时记录、保存和显示行驶过程中的汽车轮胎压力、温度等状态信息,并当压力、温度等状态偏离标准值时,系统将发出声光报警信号的汽车电子装备系统。该系统的使用可有效提高驾驶安全性与轮胎使用寿命。TP M S 作为预防爆胎的理想工具已被世界上大部分汽车制造商所接受。美国运输部和美国国家高速公路安全管理局制定了相关政策,规定从2003年11月起新出厂的轻型汽车将逐步引入轮胎压力监视系统,欧洲和日本也处于建议安装阶段。目前中国胎压监测系统市场还处于产品完善和市场起步阶段,据有关报告预计,到2010年,我国TP M S 市场将爆发,规模有望超过300万套。在这样的市场需求背景下,开发研究低成本、低功耗、可靠性好的TP M S 无疑具有十分重要的现实意义和经济意义。
1 直接式TPMS 结构及关键技术
1.1 系统结构
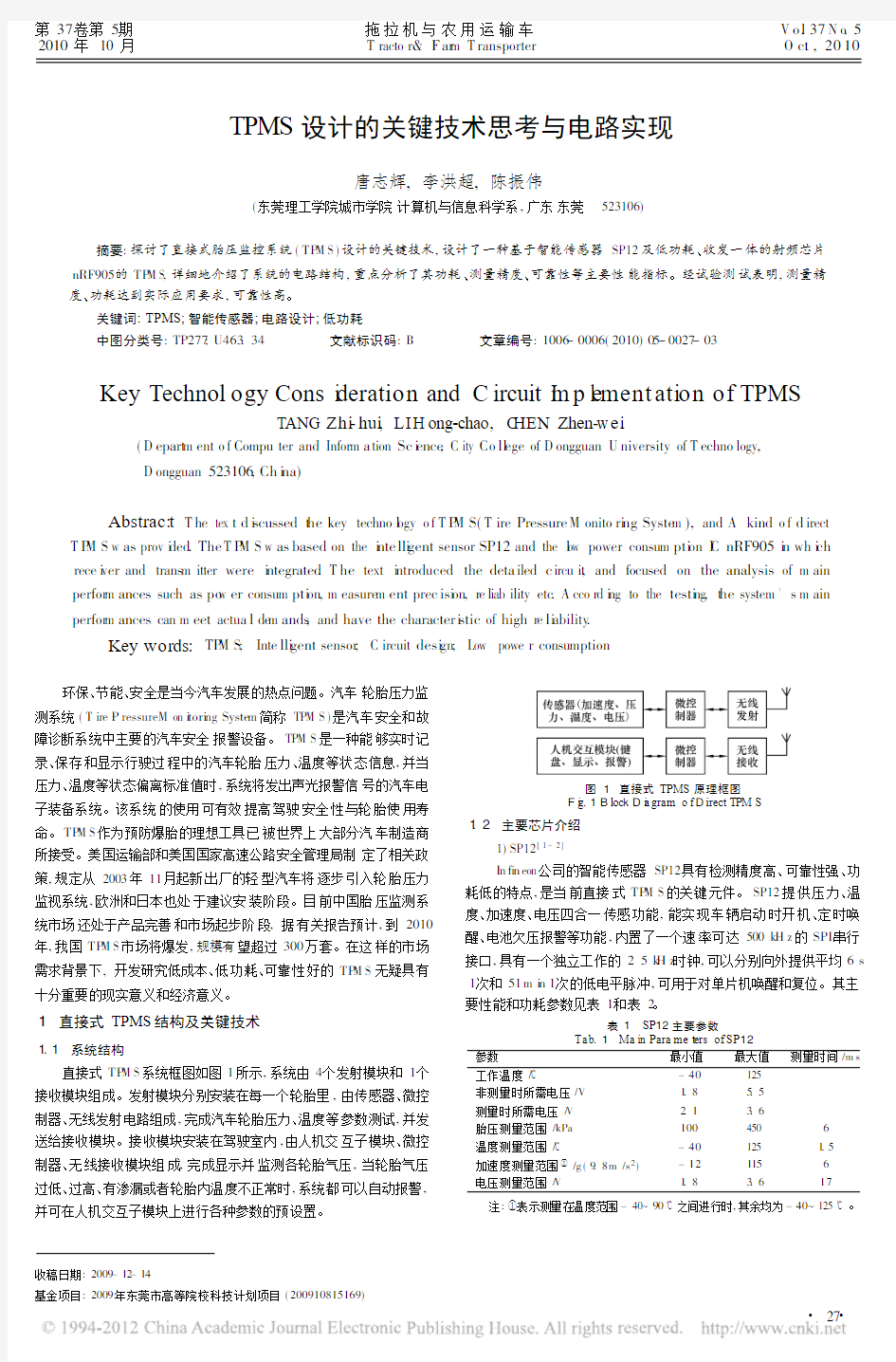
直接式TP M S 系统框图如图1所示,系统由4个发射模块和1个接收模块组成。发射模块分别安装在每一个轮胎里,由传感器、微控制器、无线发射电路组成,完成汽车轮胎压力、温度等参数测试,并发送给接收模块。接收模块安装在驾驶室内,由人机交互子模块、微控制器、无线接收模块组成,完成显示并监测各轮胎气压,当轮胎气压过低、过高、有渗漏或者轮胎内温度不正常时,系统都可以自动报警,
并可在人机交互子模块上进行各种参数的预设置。
图1 直接式TPMS 原理框图F i g .1B lock D i a gra m o f D irect TPM S
1.2 主要芯片介绍
1)SP12[1-2]
In fi n eon 公司的智能传感器SP12具有检测精度高、可靠性强、功耗低的特点,是当前直接式TP M S 的关键元件。SP12提供压力、温度、加速度、电压四合一传感功能,能实现车辆启动时开机、定时唤醒、电池欠压报警等功能,内置了一个速率可达500kH z 的SPI 串行接口,具有一个独立工作的2.5k H z 时钟,可以分别向外提供平均6s 1次和51m i n 1次的低电平脉冲,可用于对单片机唤醒和复位。其主要性能和功耗参数见表1和表2。
表1 SP12主要参数
Ta b .1 Ma in Para me t ers of SP12
参数
最小值最大值
测量时间/m s
工作温度/
-40125
非测量时所需电压/V 1.85.5测量时所需电压/V 2.13.6胎压测量范围/kPa 100
4506温度测量范围/ -401251.5
加速度测量范围 /g (9.8m
/s 2)
-121156电压测量范围/V
1.8
3.6
17
注: 表示测量在温度范围-40~90 之间进行时,其余均为-40~125 。
收稿日期:2009-12-14
基金项目:2009年东莞市高等院校科技计划项目(200910815169)
第37卷第5期 拖拉机与农用运输车 V o.l 37N o .52010年10月 T racto r&F ar m T ransporter O ct .,2010
表2 SP12功耗参数
Tab .2Pa r a m eters f o r SP12Po we rC onsu mp ti o n
参 数典型值测量胎压电流/mA 0.6测量温度电流/mA 2测量电压电流/mA 0.17测量加速度电流/mA 1数字部分工作电流/mA 0.6待机电流/ A 2.3 注: 测试条件为V DD =3V,T =90 。
综合以上两表,假设工作电压为V DD =3V ,T =90 ,可以得到测量一次胎压、温度、电压、加速度的电流消耗分别为:P p =4mAm s ,P T =4mAm s ,P V =4mAm s ,P A =4mAm s 。
2)nRF905[3]
nRF905采用SOC (片上系统)方法设计,是业界体积最小、功耗最低、外围元件最少的低成本射频芯片之一。工作在433/868/915M H z 的IS M 频段,工作电压为1.9~3.6V ,温度范围为-40~+85 ,最大发射功率为10dBm 。其采用高斯频移键控GFSK,最大数据传输100kbps 。其有4种工作模式:掉电模式、待机模式、接收模式以及发射模式。硬件实现了数据的曼彻斯特编码、解码以及CRC 校验等功能,简化了软件的开发难度。其功能参数见表3。
表3 n RF905功耗参数
Ta b .3Para me t ers f or n R F905Powe rC onsu mp ti o n
参 数数 据输出功率为+10dB m 时工作电流/mA 30接收模式时工作电流/mA 12.5待机模式时工作电流/ A 12.5掉电模式时工作电流/ A 2.5 注: 参见nRF905有关资料。
3)P89LPC938
P89LPC938是微功耗、高性能、单片封装的M CU,同一时钟频率下,其执行速度是普通80C51的6倍,支持空闲和两种不同的掉电节电模式,典型的掉电电流为1 A,是增强型UART 。其具有波特率发生器、间隔检测、帧错误检测和自动地址检测功能,支持400kH z 字节方式I2C 通信端口和SPI 通信端口;片上集成有晶振电路和复位电路,最小系统简单,接通电源即可工作。其主要参数见表4。1.3 关键技术研究及方案的选择
1)信源的编码方式 其采用曼彻斯特编码,实现方式简单,且具有良好的抗干扰性能和自同步能力。
表4 P89L PC938主要参数表
Tab .4M a i n Para m et e r s o f P89L PC 938
参 数最小值最大值
工作温度/ -55125工作电压/V
2.4
3.6每个I/O 管脚的输出电流/mA 20最大总I/O 电流/mA
100内部RC 振荡器频率/MH z 7.1897.557内部看门狗振荡器频率/k H z 320
520振荡器频率/MH z 12低功耗选择频率/M H z
8
注: 参见P 89LPC938有关资料。
2)射频调制方式 通常情况下,为达到相同的误码率,ASK 在信噪比要求上比FSK 要高出3dB 左右,因此,采用FSK 抗干扰性好。
3)天线 考虑金属轮毂和轮胎金属丝网的屏蔽,以及车轮高速行驶时天线不断变换方向、角度的影响,目前应用于TP M S 发射器的天线主要有螺旋天线和PCB 环形天线。两者相比PCB 环形天线在体积与成本上占优势。
4)轮胎定位 输入识别码式定位技术是将识别码通过按键输入到中央控制模块保存。 低频唤醒式技术利用低频信号的近场效应,由中央控制模块依次对各轮胎发送低频唤醒信号,被唤醒的轮胎监测模块将本模块的识别码发送给中央控制模块,自动完成轮胎定位。两者相比输入识别码式成本低、可靠性好。
2 硬件电路设计
笔者设计的直接式TP M S 采用界面输入式完成轮胎的重新定位。发射模块工作寿命为4~6年。系统动态显示4个轮胎压力与温度值,当某个轮胎的压力、温度状况出现异常时,产生声、光报警,用户可以根据实际情况自行设置合理的压力、温度报警阈值。通信频率为430~900M H z ;最大发射功率为10dBm;压力测量范围为100~450kPa ,测量精度约为 8kPa ;温度测量范围为-40~+125 ,测量精度约为 3 ;接收灵敏度为-80dBm 。2.1 发射模块
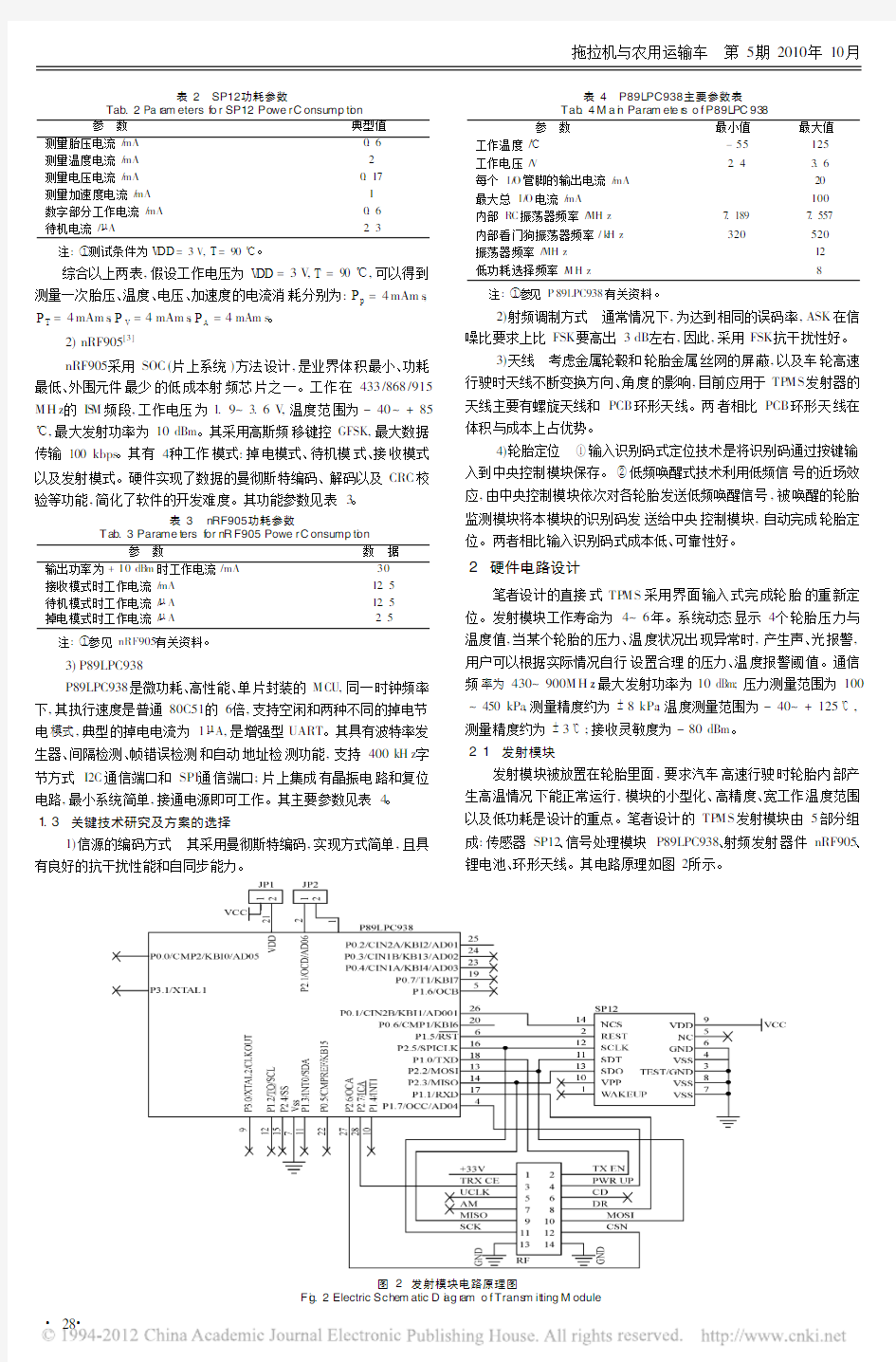
发射模块被放置在轮胎里面,要求汽车高速行驶时轮胎内部产生高温情况下能正常运行,模块的小型化、高精度、宽工作温度范围以及低功耗是设计的重点。笔者设计的TP M S 发射模块由5部分组成:传感器SP12、信号处理模块P89LPC938、射频发射器件nRF905、锂电池、环形天线。其电路原理如图2
所示。
图2 发射模块电路原理图
Fi g .2Electric Sch e m atic D i a g r a m o f Trans m it ting M odule
拖拉机与农用运输车 第5期2010年10月
nRF905外围电路包括外部参考时钟VCO 电路、天线和接口驱动电路,以及与单片机的接口电路,详细电路图见参考文献[1]中的图11。系统采用具有T 型匹配网络的差分环形天线,匹配网络元件参数及详细电路图见参考文献[1]图11。电池选用锂亚电池。
发射模块的工作过程如下:P89LPC938通过SPI 总线向SP12发送测量命令,同时将上一个命令得到的数据发回给P89LPC938;
P89LPC 938对加速度进行判断,看是否需发送数据,若不需则让所有器件进入睡眠状态,若要发送则通过SP I 总线将数据发给nRF905,并控制nRF905将数据发送出去,数据发送完成后,使系统进入睡眠状态。2.2 接收模块
接收模块由RF 模块nRF905、单片机AT89S52、键盘、LCD,以及报警模块ISD4004和电源模块7805组成,其电路原理如图3
所示。
图3 接收模块电路原理图
F i g .3Elect ric Sch e m atic D i a gra m o f Rece i v i n g M odule
由于接收模块在体积、速度等方面要求可低于发射模块,单片机选用AT89S52,其优点是内核稳定性好、价格低、开发设备多;缺点是速度较慢,但对于本设计其速度已足够。AT89S52同样具有低功耗特点,支持2种节电模式,空闲模式下CPU 停止工作,允许RAM 、定时器/计数器、串口、中断继续工作。掉电保护方式下,单片机停止一切工作。
LCD 的显示分辨率为128 64,内置8192个16 16点汉字,和128个16 8点ASC 字符集,具有4位/8位并行、2线或3线串行多种接口方式。
语音模块采用ISD4004,其芯片的设计是基于所有操作必须由微控制器控制,操作命令可通过串行通信接口(SPI 或M icrow ire)送入。其具有声音质量好、可在断电情况下保存100年(典型值)、反复录音达10万次,并可为系统扩张预留空间的特点。
接收模块的工作过程如下:当空中有符合nRF905的频率和编码的电磁波时,nRF905进入接收模式,将接收的信号跟自身的地址进行比对,若符合则进行CRC 校验;当所有条件都符合时,nRF905就
会通知单片机,单片机通过SPI 总线将nRF905的数据读出,单片机将接收到的信号跟自身储存的4个I D 进行比对,若与任何一个都不符合即丢弃数据,若与某个相同即将气压、温度等数据存入对应的轮胎。正常情况下,对4个轮胎的数据进行轮流显示,在显示某个轮胎的数据时同时对所有轮胎的安全情况进行判断,以保证报警的及时性;若发现某个轮胎有危险,立即显示该轮胎I D 号并发出警报。键盘为人机交互的输入设备,用于设置各种参数,如轮胎换位、定位后的新ID 号、不同情况下的安全气压、安全温度等。
3 测试分析
3.1 低功耗分析方法
根据参考文献[4]59~60页的分析方法,用1个500mA H 的电池;电池的使用寿命为4~6年。3.2 可靠性、测量精度测试
由于条件所限,在室验室内进行了以下试验。发送信号的中心
(下转第32页)
唐志辉等:TPM S 设计的关键技术思考与电路实现
比应大些,这样可以减少节流损失,以改善启动性能。此因素应与通道倾角结合考虑,通道不宜过长,否则会增加流动阻力,不利于气体从涡流室中流出。
表4 正交设计方差分析结果(完全随机模型)
Tab.4Result o fO rt h ogon a l Design Va riance Analysi s
变异来源平方和自由度均方F值显著水平
第1列214.03811214.038170.166060.07564
第2列3.7812513.781251.2395710.46588
第3列20.67245120.672456.7768530.23348
第4列47.14205147.1420515.454130.15858
第5列619.87211619.8721203.20680.04459
第6列176.53211176.532157.870820.08321
误差3.0504513.05045
总和1085.088
注:1.8处理2水平5因素;
2.原车P e=41.78k W,g e=280.14g/(k W h),4#设计比原车节油8.3%。
因素C离差平方和为47.14205,自由度为1,均方为47.14205, F值15.45413,显著性为0.15858。由此认为适当地增大主燃烧室进气侧的容积,会让更多的新鲜空气集中在此区域,使其加热程度降低,密度增大,实现主燃烧室进排气门两侧气体较理想的均匀混合。由二元分析可知,因素C与因素A的交互作用明显,且在C因素36 64水平下对节油影响较大。
因素D离差平方和为619.8721,自由度为1,均方为619.8721, F值为203.2068,显著性为0.04459。由此认为ZS15S15与ZS4S15两种喷嘴中前者节油效果明显。由于采用碰撞挡块并不改善燃油喷出的雾化颗粒大小,仅改善喷出油粒的飞溅面积,增大其与空气的混合程度,因此,增加挡块后ZS15S15节油效果明显。
因素E离差平方和为176.5321,自由度为1,均方为176.5321, F值为57.87082,显著性为0.08321。由此认为油束经碰撞后产生的喷雾质量要比无碰撞油束和空气的接触面积大许多;其喷雾锥角明显增大,油束贯穿度减小;油滴劣化程度基本不变。所有这些可以显著地降低发动机的燃油消耗率g
e
,并可以减少其烟度排放,故因素D对节油影响明显。
原方案与正交试验法优化方案A
1
B2C2D2E1经济性及排放性能的对比见表5、表6。
6 结论
从上面分析可知,因素A、D、E对涡流室柴油机的燃油消耗率均
表5 标定工况时经济性对比
Tab.5Econo my Co m p a rison a t R at ed Op e r a ti o n C on d ition
g
e
/[g (k W h)-1]
原车
12221
下降值/% 280.14256.538.3
表6 标定工况时排放性能对比
Ta b.6Em iss i o n Perf or mance Co m parison at R at ed Operation C on d ition
烟度/Rb
原车A
1
B2C2D2E1
烟度下降值/Rb
6.34.81.5
有显著影响。其对燃油消耗率影响程度顺序为D、A、E。
对原4115TA
1
柴油机的主燃烧室进、排气门凹坑的不对称容积比、通道倾角、通道截面比、喷油嘴角度、碰撞挡块角度5个方面参数的调整,以及试验结果的研究分析可知:涡流室顶部凹坑不对称容积比和通道倾角对燃油消耗率(热效率)的影响大于涡流室容积比和通道截面积比对燃油消耗率的影响;同时其还提高了进气流量,改善了燃烧室中的空气和燃油的混合质量,进而也提高空气利用率。采用主副燃烧室结构参数的优化组合及增加碰撞挡块方案,比原机在标定工况下燃油消耗率降低8.3%,炭烟排放下降了1.5Rb。
参考文献:
[1] 倪向东,梅卫江,马本学.涡流室燃烧系统结构参数的实验优化[J].拖
拉机与农用运输车,2007,34(3):73-75.
[2] 孟昭昕,陶克苏.用正交模拟法优化非直喷燃烧系统参数匹配[J].内燃
机工程,2005(8):63-64.
[3] 邓名华,徐智,蒋勇,等.涡流室柴油机燃烧系统参数对性能作用规律的
研究[J].江苏理工大学学报,2001(1):24-27.
[4] 黄荣华,刘永长.涡流室式柴油机燃烧室连接通道流量系数的研究[J].
内燃机学报,1995,13(3):205-216.
[5] 姚春德.燃油撞击对柴油机混合气形成及其燃烧过程的影响研究[J].
内燃机学报,2001(2):123-127.
[6] 朱广圣.柴油机涡流室联接通道结构参数对其空气流动特性影响的研究
[J].内燃机工程,1998(3):52-57
(编辑 刘红云)作者简介:倪向东(1974-),上海崇明人,副教授,硕士,主要研究方向为内燃机节能改造、机械设计及理论。
(上接第29页)
频率为433.9M H z,测试条件为V DD=3.56V,由锂亚电池供电。
1)将1个轮胎模块放在距监视器模块约6m的距离发射时,数据接收正常,没有出现漏帧、错帧的现象。当轮胎模块经过移动并且距监视器模块的距离超过10m时,漏帧和错帧率不超过1%。
2)4个轮胎模块同时启动(每个轮胎模块情况同上一试验),由于发射数据碰撞引起的漏帧不超过5帧,也就是说,在4个轮胎模块都进入发射的情况下,各轮胎模块只要连续发送5次就可以保证监视器模块能够接收到。
3)将轮胎模块放在密封瓶内,分别改变其压力与温度,即压力从150kPa增加至272kPa,温度从11 增加至51 。此时压力与温度测量结果表明,压力测量精度约为 8kPa,温度测量精度约为
3 。
4 结论
提出了一种基于智能传感器SP12及低功耗、收发一体的射频芯片nRF905的TP M S电路设计方案。上述测试结果表明,系统的测量精度、功耗达到实际应用要求,可靠性高,成本低,具有市场推广价值。
参考文献:
[1] 英恒科技(中国)有限公司.14-P i n数字式压力传感器[EB/OL].(2004
-06-15)[2009-11-25].htt p://www.i ntron-tec h.co m/do wnfil e/Infi neo n/ SP12_i nt ron.pd.f
[2] 单春贤,韩钧,胡苏杭,等.轮胎压力监测系统的开发及发展趋势[J].拖
拉机与农用运输车,2006,33(5):91-93.
[3] 秦拯,胡建国,刘志贤.汽车胎压智能监测系统研究与实现[J].微计算
机信息,2008,24(3):230-232.
[4] 魏柠柠.TP M S汽车胎压监测系统的关键技术研究和工程实现[D].浙
江:浙江大学信息学院,2006.
(编辑 郭聚臣)
作者简介:唐志辉(1967-),女,湖南省邵阳市人,讲师,硕士;李洪超(1965-),男,广东省梅州市人,高级工程师,博士;陈振伟(1983-),江西省南昌市人,讲师,硕士。
拖拉机与农用运输车 第5期2010年10月
施工技术方案申报表 (承包[2007]技案 06 号) 合同名称:洞头县黄岙二期围涂工程促淤堤工程合同编号:HAWK/C-01 承包人:中国水电十三局温州洞头县黄岙二期围涂工程促淤堤工程项目部 本表一式 4 份, 设代机构各1份。
洞头县黄岙二期围涂工程促淤堤工程临时码头设计方案 编写:工程技术部 审查: 批准: 中国水电十三局温州洞头县 黄岙二期围涂工程促淤堤工程项目部 二○○七年六月十五日
临时码头设计方案 根据我方上报的施工总平面布置的规划,在昌泰造船厂旁的原码头处修建具有二个200m3开底驳泊位的临时码头一座和具有二个200m3平板驳泊位的临时码头一座,作为本工程碎石、抛石、土工布、排水板等施工材料的中转码头。该码头距离营盘基乌槽坑料场约700m,至促淤堤0+000桩号堤头水上距离约2.5km。 另新建8m宽从乌槽坑料场坡脚环岛公路到码头长度约700m的施工专用道路,以便碎石毛料及抛石料的运输。 经过现场实地测量,结合工程的开工日期和施工强度,经研究论证,临时码头采用以下形式: 1、开底驳泊位修建两个,每个泊位长50米,泊位高程按小潮位可以组织生产设计,小潮位平均高程1.38m ,码头底部标高-1.8m,船舶满载后吃水深度2.8m,可以满足使用要求。为能充分利用潮水工作时间,两个泊位采用不等高设计,1#泊位顶面高程4.0米,2#泊位顶面高程5.5米。具体设计如下: (1)码头外侧挡墙采用M7.5号浆砌块石。软基处挡墙基础采用抛石挤淤处理,抛石面用碎石找平,上部浇筑钢筋混凝土基础,混凝土强度C20,钢筋采用双向Φ16@200,厚度30厘米;岩基处挡墙基础,在基面清理后,用C20混凝土座浆,上面砌筑块石挡墙。1#泊位挡墙顶宽1.5米,外侧采用直立式,内侧坡比在1:0.3左右,1#泊位挡墙底宽3米。2#泊位挡墙顶宽2米,外侧采用直立式,内侧坡比在1:0.3左右,挡墙底宽4米。 (2)浆砌块石挡墙内侧回填石渣料,回填料要压实,压实度不小于0.7。 (3)码头顶面采用C20混凝土地坪,厚度20厘米。为了满足装船需要,1#、2#泊位在中间位置修建12米宽的悬挑平台,悬挑平台采用钢结构,悬挑
第一章概述 1、1 直流―直流变换的分类 直流—直流变换器(DC-DC)就是一种将直流基础电源转变为其她电压种类的直流变换装置。目前通信设备的直流基础电源电压规定为?48V,由于在通信系统中仍存在?24V(通信设备)及+12V、+5V(集成电路)的工作电源,因此,有必要将?48V基础电源通过直流—直流变换器变换到相应电压种类的直流电源,以供实际使用。D C/DC变换就是将固定的直流电压变换成可变的直流电压,也称为直流斩波。主要有 (1)Buck电路——降压斩波,其输出平均电压小于输入电压,极性相同。 (2)Boost电路——升压斩波,其输出平均电压大于输入电压,极性相同。 (3)Buck-Boost电路——降压―升压斩波,其输出平均电压大于或小于输入电压,极性相反,电感传输。 (4)Cuk电路——降压或升压斩波,其输出平均电压大于或小于输入电压,极性相反,电容传输。 此外还有Sepic、Zeta电路。 1、2 直流—直流变换器的发展 当今软开关技术的发展使得DC/DC发生了质的飞跃,美国VICOR公司(美国怀格公司,国际知名的电源模块生产厂家)设计制造的多种ECI软开关DC/DC变换器,其最大输出功率有300W、600W、800W等,相应的功率密度为(6、2、10、17)W/cm3,效率为(80~90)%。日本NEMIC—LAMBDA(联美兰达,日本的开关电源厂商、2012年兰达被TDK收购,名称也改为TDK-LAMBDA)公司最新推出的一种采用软开关技术的高频开关电源模块RM系列,其开关频率为(200~300)kHz,功率密度已达到27W/cm3,采用同步整流器(MOSFET代替肖特基二极管),使整个电路效率提高到90%。
IPM自举电路设计过程中的关键问题研究 摘要:介绍了IPM自举电路的基本拓扑结构和原理,并在理论分析的基础上,研究和探讨了自举电阻、自举二极管和自举电容的选型方法,重点对自举电容初始充电展开研究,提出了一种简单实用的初始充电方法,在实际项目应用中取得良好的充电效果。实验结果表明,这种初始充电方法简单、实用、安全可靠,解决了初始充电可能导致IPM上下管直通的问题。关键词:自举电路;自举电容;自举电阻;自举二极管;初始充电 通常IPM模块应有四路独立电源供电,下桥臂三个IGBT控制电路共用一个独立电源,上桥臂三个IGBT控制电路用三个独立电源。对于小功率IPM,可以由自举电路将其他三路电压进行自举而得到三个独立电源[1]。IPM模块通过将功率器件、驱动电路和保护电路高度集成在一块很小封装基板上,使得功率模块应用单一电源供电成为可能。为了简化设计,驱动电路已普遍采用单一控制电源方案。使用单一电源,必须满足两个要求:一是保证控制电源能够为上桥臂功率器件提供正确的门极偏置电压;二是保证直流母线上的高压不致串到控制电源电路而烧坏元器件。通常使用自举电路法来实现IPM模块的单一电源供电。实现自举有两个关键问题:一是自举电容的初始充电;二是自举电容充完电后,当下臂关断后上臂并未立即导通,而在从下臂关断到上臂导通期间,电容会放电,因此必须保证少量放电后电容电压仍有驱动能力。如果以上两个问题未能处理好,将导致即使PWM波形正常,IPM也不能工作,因为自举电压不足以驱动上臂导通。本文介绍了IPM自举电路的基本拓扑结构和原理,并重点研究了自举电容初始充电问题,通过在控制程序中执行简单的初始充电语句,很好地解决了上述关键问题,并在项目中取得良好的充电效果。1 IPM模块自举电路基本拓扑结构和原理电压自举,就是利用电路自身产生比输入电压更高的电压。基于电容储能的电压自举电路通常是利用电容对电荷的存储作用来实现电荷的转移,从而实现电压的提升。电压自举电路利用电荷转移的方式进行工作,通过存储电容,把电荷从输入转移到输出,提供负载所需要的电流。图1给出了双倍压电压自举电路的基本原理。 假设所有开关均为理想开关,电容为理想电容。当开关S1和S3闭合时,电源VCC给电容C充电使其电压达到VCC。然后开关S1和S3断开,S2闭合,直接接到电容C的低压端,此时电容C上仍然保持有前一个相位存储的电荷VCC×C。由于在S2闭合时,电容C上的电荷量不能突变,因此有:(V0-VCC)×C=VCC×C,即V0=2VCC。在没有直流负载的情况下,通过图1所示的电路,在理想情况下,输出可达到输入电压的两倍。2 自举电路设计中的关键问题研究本项目的IPM型号选用IGCM20F60GA[2]。图2是IPM自举电路原理图。由图2可知,自举元件一端接电路的输入部分,另一端接到同相位的输出电路部分,借输入、输出的同相变化,把自己抬举起来,即自举元件引入的是正极性的反馈。 对原理图中第一路自举电路进行分析[3-4]。IPM模块自举电路仅由自举电阻R62、自举二极管D9和自举电容E1组成,因此简单可靠。其电路基本工作过程为:当VS因为下桥臂功率器件导通被拉低到接近地电位GND时,控制电源VCC会通过R62和D9给自举电容E1充电。当上桥臂导通,VS上升到直流母线电压后,自举二极管D9反向截止,从而将直流母线电压与VCC隔离,以防止直流母线侧的高压串到控制电源低压侧而烧坏元器件。此时E1放电,给上桥臂功率器件的门极提供驱动电压。当VS再次被拉低时,E1将再次通过VCC充电以补充上桥臂导通期间E1上损失的电压。这种自举供电方式就是利用VS端的电平在高低电平之间不停地摆动来实现的。,自举电路给E1充电,E1的电压基于上桥臂输出晶体管源极电压上下浮动。由于运行过程中反复地对自举电容进行充放电,因此必须选择适当的参数,保证
数字电路时序分析 1数字电路时序分析 前面介绍了对器件之间的互连系统进行建模所需要的知识,包括对信号完整性的详细分析并估算了由于非理想因素引起的时序变化。但是要正确设计一个数字系统还需要使系统中器件之间可以互相通信,涉及到的内容主要是设计正确的时序,保证器件的时钟/锁存信号与数据信号之间保证正确的时序关系,满足接收端要求的最小建立和保持时间,使得数据可以被正确的锁存。 在本章中将会介绍共用时钟总线(common-clock)和源同步总线(source synchronous)的基本的时序方程。设计者可以利用时序方程来跟踪分析影响系统性能的有时序要求的器件,设置设计目标,计算最大的总线频率和时序裕量。 1.1. 共用时钟定时(common-clock timing) 在共用时钟总线中,总线上的驱动端和接收端共享同一个时钟。图8.1为一个共用时钟总线的例子,是处理器与外围芯片之间的总线接口,由处理器向外围芯片发送数据。图中还示出了位于每一个输入输出单元(I/O cell)的内部锁存器。完成一次数据传输需要两个时钟脉冲,一个用于将数据锁存到驱动端触发器,另一个用于将数据锁存到接收端触发器。整个数据传输过程分为以下几个步骤: 图8.1 共用时钟总线示意图 a.处理器内核产生驱动端触发器的有效输入D p。
b.系统时钟(clk in)的边沿1由时钟缓冲器输出并沿着传输线传播到处理器用于将驱动端触发器的输入(D p)锁存到输出(Q p)。 c.信号Q p沿着传输线传播到接收端触发器的输入(D c),并由第二个时钟边沿锁存。这样有效数据就在外围信号的内核产生了。 基于前面对数据传输过程的分析,可以得到一些基本的结论。首先,电路和传输线的延时必须小于时钟周期,这是因为信号每次从一个器件传播到另一个器件需要两个时钟周期:第一个周期——驱动端触发器将数据锁存到输出(Qp),第二个周期——接收端触发器将输入数据锁存到芯片内核。由电路和PCB走线引起的总延时必须小于一个时钟周期,这一结论限制了共用时钟总线的最高理论工作频率,因此设计一个共用时钟总线时必须考虑每部分的延时,满足接收端的建立和保持时间(建立和保持时间是为了保证能够正确地锁存数据,数据应该在时钟边沿来到之前和之后必须保持稳定的最小时间,这两个条件必须满足)。 1.1.1.共用时钟总线的时序方程 图8.2的时序图用于推导共用时钟总线的时序方程,每个箭头都表示系统中的一个延时,并在图8.1中已表示出来。实线表示的定时回路(timing loop)可用于推导建立时间时序裕量的计算公式,虚线表示的定时回路可用于推导保持时间时序裕量的计算公式。下面会介绍如何使用定时回路来得到时序方程。 图8.2 共用时钟总线的时序图 时延分为三个部分:T co、飞行时间(flight time)和时钟抖动。T co为时钟有效到数据输出有效的时间;飞行时间(T flt)是指PCB上传输线的延时;时钟抖动
同步时序电路的设计步骤 同步时序电路的设计步骤 同步时序电路的分析是根据给定的时序逻辑电路,求出能反映该电路功能的状态图。状态图清楚地表明了电路在不同的输入、输出原状态时,在时钟作用下次态状态的变化情况。同步时序电路的设计的设计是分析的反过程,其是根据给定的状态图或通过对设计要求的分析得到的状态图,设计出同步时序电路的过程。 这里主要讨论给定状态图的情况下的同步时序电路的设计,对于具体的要求得到状态图的过程一般是一个较复杂的问题,这是暂不讲。根据已知状态图设计同步时序电路的过程一般分为以下几步: 1.确定触发器的个数。首先根据状态的个数来确定所需要触发器的个数,如给定的状态个数为n,由应满足 n≤2K,K为实现这来状态所需要的触发器的个数。(实际使用时可能给定的状态中存在冗余项,这时一般还须对状态进行化简。) 2.列出状态转移真值表。根据状态列出状态转移真值表,也称状态表、状态转移表。 3.触发器选型。选择合适的触发器,通常可选的触发器有:JK-FF,D-FF,T-FF,一般使用较广的为JK-FF。根据状态图和给出的触发器的型号写出其输入方程,通常在写输入方程时须对其进行化简,以使电路更简单。 4.求出输出方程。根据状态表,求出输出逻辑函数Z的输出方程,还过有些电路没有独立的输出,这一步就省了。 5.画出逻辑图。根据输入方程、输出方程画出逻辑电路图。 6.讨论设计的电路能否自启动。在设计的电路中可能出现一些无关的状态,这些状态能否经过若干个时钟脉冲后进行有效的状态。 同步时序电路设计举例 例按下图状态图设计同步时序电路。 1.根据状态数确定触发器的数目:由状态图可以看出,其每个状态由两个状态,故可用两个触发器。其变量可 用Q 1,Q 表示; 2.根据状态图列出状态表:状态表的自变量为输入变量x和触发器当前状态Q 1 n,Q n,而应变量为触发器的次态 Q 1n+1Q n+1、及输出z,列表时将自变量的所有组合全部列出来,其中当Q 1 n Q n=01的状态为不出现,其输出可看作任意 项处理。
目录 前言 (3) 第1章设计资料………………………………………………… 4………………………………………………………… 1.1地理位置4…………………………………………………………1.2营运资料4…………………………………………………..…4 1.2.1 货运任务……………………………………………………..1.2.2 4 设计船型 …………………………………………………..……..自然资料1.35 ………………………………..……………..……..…..5 1.3.1 气象……………………………………………………..…..5 1.3.2 水 文 (5) 1.3.3 河势 (5) 1.3.4 工程地质条件 (5) 1.3.5 设计荷载…………………..……………………....……..5 1.3.6 地震基本烈度..………………………………………....……..1.3.7 设计标准及规范5 ..…..………………………………………..1.4材料供应及施工条件5 …………………………………………………..……..5 1.4.1材料供应………………………………..……………..……..5 1.4.2 施工条
件 (5) 设计任务及要求 1.5 (5) 设计任务 1.5.1 (5) 1.5.2 基本要求 1 第2章码头规模确定及总平面布置 (6) ………………………………………...…………...码头的营运资料2.16 …………………………………...………………..……...6 运量 2.1.1..........................................................6 2.1.2设计船型基本尺度.. (6) 2.2出港、回港设计 (6) 2.2.1设计原则……………………………………...…………...6 码头泊位数确定 2.2.2 (7) 2.2.3方案…………………………………...………….........码头总平面布置2.37 …………………………………...…………...7 码头前沿线的确定 2.3.1 (7) 2.3.2. 码头设计水深的确定 ....................................................8 2.3.3.码头设计低水位的确定....................................................8 2.3.4. 设计河底高程的确定.. (8)
uck 电路的设计与仿真 1、Buck 电路设计: 设计一降压变换器,输入电压为 20V ,输出电压5V ,要求纹波电压为输出 电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的 电感、电容。比较说明不同开关频率下,无源器件的选择。 解:(1)工作频率为10kHz 时, A.主开关管可使用MOSFET ,开关频率为10kHz ; B 输入20V ,输出5V ,可确定占空比 Dc=25% ; C.根据如下公式选择电感 这个值是电感电流连续与否的临界值,L>L c 则电感电流连续,实际电感值 可选为1.1~1.2倍的临界电感,可选择为4 10?H ; D.根据纹波的要求和如下公式计算电容值 C=^^T s2 J =4.17 10 牛 8L^U 。 8 沃 4.5 沃 10 X0.0055 1 0000 (2)工作频率为50kHz 时, A.主开关管可使用MOSFET ,开关频率为50kHz ; B 输入20V ,输出5V ,可确定占空比 Dc=25% ; C.根据如下公式选择电感 . (1—DJR T (1 —0.25)汇10,. 1 L c (1 _DJR T 2 s (1-0.25)1° 亠 2 10000 = 3.75 10* H 5 (1-0.25) 0.75 10, H 50000 这个值是电感电流连续与否的临界值, L>Lc 则电感电流连续,实际电感值
L c T s 2
可选为1.2倍的临界电感,可选择为0.9 10" H ; D.根据纹波的要求和如下公式计算电容值 分析:在其他条件不变的情况下,若开关频率提高 n 倍,则电感值减小为 1/n ,电容值也减小到1/n 。从上面推导中也得出这个结论 2、Buck 电路仿真: 利用sim power systems 中的模块建立所设计降压变换器的仿真电路。输 入电压为20V 的直流电压源,开关管选 MOSFET 模块(参数默认),用Pulse Gen erator 模块产生脉冲驱动开关管 建模: 分别做两种开关频率下的仿真 工作频率为10kHz 时 U o (1-D c ) 8L U o T s 2 5 (1-0.25) 1 8 0.9 10J 0.005 5 500002 = 0.833 10*F matlab20120510 ?
时序电路的基本分析与设计方法
时序逻辑电路 时序逻辑电路——电路任何一个时刻的输出状态不但取决于当时的输入信号,还与电路的原状态有关。时序电路中必须含有具有记忆能力的存储器件。 时序电路的逻辑功能可用逻辑表示式、状态表、卡诺图、状态图、时序图和逻辑图6种方式表示,这些表示方法在本质上是相同的,能够互相转换。 一、时序电路的基本分析和设计方法 (一)分析步骤 1.根据给定的时序电路图写出下列各逻辑方程式: (1)各触发器的时钟方程。(2)时序电路的输出方程。(3)各触发器的驱动方程。 2.将驱动方程代入相应触发器的特性方程,求得各触发器的次态方程,也就是时序逻辑电路的状态方程。 3.根据状态方程和输出方程,列出该时序电路的状态表,画出状态图或时序图。 4.根据电路的状态表或状态图说明给定时序逻辑电路的逻辑功能。【例1】分析时序电路
(1)时钟方程:CP CP CP CP ===012 输出方程:n n Q Q Y 21= 驱动方程:?? ? ??======n n n n n n Q K Q J Q K Q J Q K Q J 202001011212 (2)求状态方程 JK 触发器的特性方程:n n n Q K Q J Q +=+1 将各触发器的驱动方程代入,即得电路的状态方程: ?? ???=+=+==+=+==+=+=+++n n n n n n n n n n n n n n n n n n n n n n n n Q Q Q Q Q Q K Q J Q Q Q Q Q Q Q K Q J Q Q Q Q Q Q Q K Q J Q 202020000100101011111112121222212 (3)计算、列状态表 n n n n n n n n Q Q Y Q Q Q Q Q Q 2 12 100 1 1112=?????===+++ (4)画状态图及时序图
题目:Buck 电路的设计与仿真 1、Buck 电路设计: 设计一降压变换器,输入电压为20V ,输出电压5V ,要求纹波电压为输出电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的电感、电容。比较说明不同开关频率下,无源器件的选择。 解:(1)工作频率为10kHz 时, A.主开关管可使用MOSFET ,开关频率为10kHz ; B.输入20V ,输出5V ,可确定占空比Dc=25%; C.根据如下公式选择电感 H T R D L s c c 41075.310000 1210)25.01(2)1(-?=??-=-= 这个值是电感电流连续与否的临界值,L>c L 则电感电流连续,实际电感值可选为1.2倍的临界电感,可选择为H 4105.4-?; D.根据纹波的要求和如下公式计算电容值 =?-=2008)1(s c T U L D U C 2410000 15005.0105.48)25.01(5?????-?-=F 41017.4-? (2)工作频率为50kHz 时, A.主开关管可使用MOSFET ,开关频率为50kHz ; B.输入20V ,输出5V ,可确定占空比Dc=25%; C.根据如下公式选择电感 H T R D L s c c 41075.050000 1210)25.01(2)1(-?=??-=-= 这个值是电感电流连续与否的临界值,L>Lc 则电感电流连续,实际电感值可选为1.2倍的临界电感,可选择为H 4109.0-?; D.根据纹波的要求和如下公式计算电容值 =?-=2008)1(s c T U L D U C 2450000 15005.0109.08)25.01(5?????-?-=F 410833.0-? 分析: 在其他条件不变的情况下,若开关频率提高n 倍,则电感值减小为1/n ,电容值也减小到1/n 。从上面推导中也得出这个结论。 2、Buck 电路仿真: 利用simpowersystems 中的模块建立所设计降压变换器的仿真电路。输入电压为20V 的直流电压源,开关管选MOSFET 模块(参数默认),用Pulse Generator 模块产生脉冲驱动开关管。分别做两种开关频率下的仿真。 (一)开关频率为10Hz 时; (1)使用理论计算的占空比,记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。 由第一步理论计算得占空比Dc=25%; 实验仿真模型如下所示(稳态直流电压值为4.299V ):
自举电路在电路设计中的应用 朱丽华 (福建信息职业技术学院福州, 350003) 摘要:在电路的设计中,常利用自举电容构成的自举电路来改善电路的某些性能指标,如利用自举提高射随器的输入阻抗、利用自举提高电路增益及扩大电路的动态范围等。本 文就自举电路的工作原理及典型应用作一介绍。 关键词:自举;自举电容;自举电路 在电路的设计中,常利用自举电容构成自举电路来改善电路的某些性能指标,如利用自举电路提高射随器的输入阻抗,利用自举电路提高放大器增益或扩大电路的动态范围等等。现就自举电路的工作原理及典型应用作一介绍。 一、自举电路的工作原理 自举电路的本质是利用电容两端电压瞬间不能突变的特点来改变电路中某一点的瞬时电位。图1是一射极跟随器电路,在偏置电路中加入电阻R3的目的在于提高输入电阻,因为输入电阻为 Ri = [R3+(R1//R2)]//[r be+(1+β)(R4//R L)] 只要将R3值取大,就可以使输入电阻增大。 但是R3取值是不能任意选大的,R3太大将使静态工作点偏离要求,因此,这种偏置方式虽然可以提高输入阻抗,但效能是有限的。 若在该电路中加一电容C3时(如图2所示),只要电容C3的容量足够大,则可认为B点的电压变化与输出端电压变化相同,R 两端的电压变化为-,此时流过R3的电流为 =(-)/ R 3=(-)/ R3 由于电路的跟随着变化而变化,即≈,所以流过R3的电流极小,说明R3此时对交流 呈现出极高的阻抗(比R3的实际阻值要大得多),这就使射极跟随器的输入阻抗得到极大提高。这种利用电容一端电位的提高来控制另一端电位的方法称为“自举”,所以称电容C3为自举电容。自举从本质上说是一种特殊形式的正反馈。 二、应用实例 1.利用自举电路提高射极跟随器的输入电阻 射随器具有输入阻抗高、输出阻抗低的特点,所以在电子线路中的应用是极为广泛的。图3是一典型射极跟随器电路,由于基极采用的是固定偏置电路,所以无法保证工点的稳定。如果将它改为如图4所示
实验九Moore型同步时序逻辑电路的分析与设计 22920132203686 薛清文周2下午实验 一.实验目的: 1.同步时序逻辑电路的分析与设计方法 2.D,JK触发器的特性机器检测方法。 2.掌握时序逻辑电路的测试方法。 3.了解时序电路自启动设计方法。 4.了解同步时序电路状态编码对电路优化作用。 二.实验原理: 二、 1.Moore同步时序逻辑电路的分析方法: 时序逻辑电路的分析,按照电路图(逻辑图),选择芯片,根据芯片管脚,在逻辑图上标明管脚号;搭接电路后,根据电路要求输入时钟信号(单脉冲信号或连续脉冲信号),求出电路的状态转换图或时序图(工作波形),从中分析出电路的功能。 2.Moore同步时序逻辑电路的设计方法: (1)分析题意,求出状态转换图。 (2)状态分析化简:确定等价状态,电路中的等价状态可合并为一个状态。(3)重新确定电路状态数N,求出触发器数n,触发器数按下列公式求:2n-1 唐山湾国际旅游岛大清河渔港码头 规划方案 2014年06月 第一章概述 0 工程概况 0 码头位子现状 0 第二章工程设计方案 0 设计船型 0 设计水位 0 设计高程 0 码头前沿底高程 0 码头前沿高程 0 码头水域 (1) 总平面布置 (1) 码头结构 (1) 进出港道路 (1) 第三章投资估算 (1) 主要工程量 (1) 投资估算 (2) 第四章方案比选 (4) 工程设计方案对比见下表: (4) 第五章问题与建议 (4) 主要问题与建议 (4) 第一章概述 工程概况 拟建的大清河渔港位于大清河河口右岸,三岛规划湖心岛西侧,地理坐标为北纬39°10′27″,东经118°51′19″。项目临近现有三座渔港(碱厂渔港,新渔村渔港,三贝明珠)。 码头位子现状 拟建码头位于大清河河口湖心岛西侧凹岸处,码头后方为养殖池。现状码头规模较小且码头结构破损较为严重。 第二章工程设计方案 设计船型 根据现有的船型资料,考虑近年来渔业生产的变化及渔船发展趋势,确定110kw机帆渔船为主要设计代表船型,兼考虑300HP渔政船。 设计水位(85国家高程系) 设计高水位: 设计低水位: 极端高水位: 极端低水位: 设计高程 码头前沿底高程 根据《渔港总体设计规范》(SC/T9010-2000)第条,码头前沿水深按下方式计算: (1)110kw渔船泊位码头前沿底高程 H=T+h+△h 式中:H——码头前沿水深 T——设计代表船型满载艉吃水,取 H——富裕水深,取 △h——备淤深度,取 经计算码头前沿水深H= 码头前沿底高程=设计低水位-码头前沿水深(H)=,取 码头前沿高程 根据《渔港总体设计规范》(SC/T9010-2000)第条,码头前沿高程计算如下:基本标准: H p =h s +h o =+(~)=~ 式中:H p 码头前沿高程,m H s 设计高水位, h o 超高,m,取~ 第一章概述 1.1 直流―直流变换的分类 直流—直流变换器(DC-DC)是一种将直流基础电源转变为其他电压种类的直流变换装置。目前通信设备的直流基础电源电压规定为?48V,由于在通信系统中仍存在?24V(通信设备)及+12V、+5V(集成电路)的工作电源,因此,有必要将?48V基础电源通过直流—直流变换器变换到相应电压种类的直流电源,以供实际使用。D C/DC变换是将固定的直流电压变换成可变的直流电压,也称为直流斩波。主要有 (1)Buck电路——降压斩波,其输出平均电压小于输入电压,极性相同。 (2)Boost电路——升压斩波,其输出平均电压大于输入电压,极性相同。 (3)Buck-Boost电路——降压―升压斩波,其输出平均电压大于或小于输入电压,极性相反,电感传输。 (4)Cuk电路——降压或升压斩波,其输出平均电压大于或小于输入电压,极性相反,电容传输。 此外还有Sepic、Zeta电路。 1.2 直流—直流变换器的发展 当今软开关技术的发展使得DC/DC发生了质的飞跃,美国VICOR公司(美国怀格公司,国际知名的电源模块生产厂家)设计制造的多种ECI软开关DC/DC变换器,其最大输出功率有300W、600W、800W等,相应的功率密度为(6.2、10、17)W/cm3,效率为(80~90)%。日本NEMIC—LAMBDA(联美兰达,日本的开关电源厂商.2012年兰达被TDK收购,名称也改为TDK-LAMBDA)公司最新推出的一种采用软开关技术的高频开关电源模块RM系列,其开关频率为(200~300)kHz,功率密度已达到27W/cm3,采用同步整流器(MOSFET代替肖特基二极管),使整个电路效率提高到90%。 实验二 时序逻辑电路的设计 一、实验目的: 1、 掌握时序逻辑电路的分析方法。 2、 掌握VHDL 设计常用时序逻辑电路的方法。 3、 掌握时序逻辑电路的测试方法。 4、 掌握层次电路设计方法。 5、 理解时序逻辑电路的特点。 二、实验的硬件要求: 1、 EDA/SOPC 实验箱。 2、 计算机。 三、实验原理 1、时序逻辑电路的定义 数字逻辑电路可分为两类:组合逻辑电路和时序逻辑电路。组合逻辑电路中不包含记忆单元(触发器、锁存器等),主要由逻辑门电路构成,电路在任何时刻的输出只和当前时刻的输入有关,而与以前的输入无关。时序电路则是指包含了记忆单元的逻辑电路,其输出不仅跟当前电路的输入有关,还和输入信号作用前电路的状态有关。 2、同步时序逻辑电路的设计方法 同步时序逻辑电路的设计是分析的逆过程,其任务是根据实际逻辑问题的要求,设计出能实现给定逻辑功能的电路。同步时序电路的设计过程: (1)根据给定的逻辑功能建立原始状态图和原始状态表。 ①明确电路的输入条件和相应的输出要求,分别确定输入变量和输出变量的数目和符号; ②找出所有可能的状态和状态转换之间的关系; ③根据原始状态图建立原始状态表; (2)状态化简---求出最简状态图。 合并等价状态,消去多余状态的过程称为状态化简。 等价状态:在相同的输入下有相同的输出,并转换到同一个次态去的两个状态称为等价状态。 (3)状态编码(状态分配)。 给每个状态赋以二进制代码的过程。 根据状态数确定触发器的个数,n n M 221-≤∠(M 为状态数;n 为触发器的个数)。 (4)选择触发器的类型。 (5)求出电路的激励方程和输出方程。 (6)画出逻辑图并检查自启动能力。 3、时序逻辑电路的特点及设计时的注意事项 ①时序逻辑电路与组合逻辑电路相比,输出会延时一个时钟周期。 ②时序逻辑电路一般容易消除“毛刺”。 ③用VHDL 描述时序逻辑电路时,一般只需将时钟信号和异步控制(如异步复位)信号作为敏感信号。 第十六单元时序逻辑电路 (8学时——第49~56学时) 主要容:时序逻辑电路的分析与设计 教学重点:时序逻辑电路的分析与设计方法 教学难点:时序逻辑电路的设计 教学方法:启发式教学、探究式教学 教学手段:实验、理论、实际应用相结合 第一部分知识点 一、时序电路概述 时序电路的状态及输出是与时间顺序有关的,由组合电路和存储电路(多为触发器)组成,1、特点 任意时刻的输出,不仅与该时刻的输入有关、还与电路原来的状态有关。 2、分类 按逻辑功能分为计数器、寄存器等,按触发器工作分为同步电路和异步电路,按电路输出信号特性分为Mealy型(输出与输入及电路现态有关)和Moore型(输出仅与电路现态有关)电路。 二、时序电路的分析 1、分析步骤 (1)写出电路的时钟方程(各触发器的CP表达式)、输出方程(各输出端表达式)及驱动方程(各触发器的触发信号表达式)。 (2)求出电路的状态方程(各触发器的状态表达式) (3)计算得出电路工作状态表 (4)画状态图及时序图 (5)分析电路功能 2、分析举例 分析时序电路 (1)时钟方程CP0=CP1=CP2=CP 输出方程n n n Q Q Q Y 1 2 = 驱动方程n Q J 2 =、n Q K 2 =,n Q J 1 =、n Q K 1 =,n Q J 1 2 =、n Q K 1 2 =(2)状态方程 将J、K代入JK触发器特征方程n n n Q K Q J Q+ = +1得各触发器状态方程: n n Q Q 2 1 = +、n n Q Q 1 1 = +、n n Q Q 1 1 2 = + (3)计算得到状态表 现态次态输出 n Q 2 n Q 1 n Q 1 2 | n Q+1 1 + n Q1 + n Q Y 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 1 0 0 0 0 1 0 1 0 0 1 1 0 1 1 1 1 1 1 1 (4)画状态图及时序图 (5)逻辑功能 这是一个有六个工作状态的同步工作电路,属Moore型电路。 (6)有效态和无效态 太仓国际集装箱码头有限公司发展对策 方案设计 团队成员:XXX:思路的整合,后期的美化,以及未来发展模式的讲解。 XXX:报告主体部分撰写,以及港口现状的介绍。 XXX:材料的梳理,数据的整合。 XXX:材料的收集 XXX:数据的收集 摘要:自1992年建港以来,太仓港历创佳绩。为此,我们从其地理位置,腹地,货源,竞争对手,航线状况等方面进行了纯理论的深入分析。其中,我们对太仓国际集装箱码头有限公司进行了码头设施,陆路交通系统介绍,以及我们一致认为,将在未来建成的“沪通铁路”必然会促进以太仓港为中心的多式联运的发展。还有我们认为该公司的管理水平是比较先进的,主要理由它是一家中外合资企业,在管理理念方面,他必然继承西方的管理血统。但我们坚持认为如果公司适当的采取一些奖励机制的话,公司的职工将更加有干劲。从而能使这样一个强大的内河港口变得更加的繁荣。 关键词:太仓港目前状况存在问题未来发展 引言 太仓是江苏经济最繁荣的县级市之一,在这样的大繁荣背后,必然存在一个个十分强大的产业。作为一代港城,其港口的发展可想而知! 为此我们小组决定将太仓港的太仓国际集装箱码头有限公司作为我们此次调查和研究的对象。确定了研究对象后,我们分工合作,争取能完成一份比较完美的调查报告。在此期间我们参考了《中国港口年鉴》系列丛书上的数据,同时我们还查阅了“中国统计网”,“江苏水运管理局官网”和“苏州日报官网”。因此,我可以肯定说,我们的报告中所出现的所有的数据在我们的现在 的认知下都是具有真实性与时效性的,为此我十分感谢我的组员们论文撰写的前期所做的努力! 在论文的撰写中我们参考了“交通运输部水运研究院”的就港口发展方面的理论成果,以充实自己的理论。同时为了我们的论文显得更加的有血有肉,我们还是使用了图,表等让人一目了然的数据表现方法,让阅读论文的人能更加清晰的看出我们的研究对象——太仓国际集装箱码头有限公司的发展及业务现状。在谈及该公司的未来发展时,我小组成员一致认为2012年底发改委审批通过的“沪通铁路”的建设,必然会对太仓港的发展起到的质的影响。 此篇港口发展方案,覆盖面较广其中包括了太仓港的地理位置、腹地、竞争对手、航线状况、以及发展对策及措施。所以,在论文中难免会出现一些偏左或偏右的想法,希望读者理解。另外,我们的报告只是未进行科学调查的纯理论研究报告,可能最后的研究成果会与太仓国际集装箱码头有限公司的实际情况有所偏差。因此,我们真心的希望从事相关研究的朋友能给予指导。 XXX 2013年3月 Buck电路设计与仿真 姓名:朱龙胜 班级:电气1102 学号:11291065 日期:2014年5月10日 指导老师:郭希铮 北京交通大学 计算机仿真技术作业四 题目:Buck 电路的设计与仿真 1、Buck 电路设计: 设计一降压变换器,输入电压为20V ,输出电压5V ,要求纹波电压为输出电压的0.5%,负载电阻10欧姆,求工作频率分别为10kHz 和50kHz 时所需的电感、电容。比较说明不同开关频率下,无源器件的选择。 2、Buck 电路理论计算: 由以下公式计算: 20.252.0.5A (1) 3.5% 8() 4.2o d o o o s o s d o LB OB V D V V I R V T D V LC DT V V I I L = == =?-==-== 1.占空比: 负载电流: 纹波电压: 电流连续条件: 得到下列计算结果 3、Buck 电路仿真: 利用simpowersystems 中的模块建立所设计降压变换器的仿真电路。输入电压为20V 的直流电压源,开关管选MOSFET 模块(参数默认),用Pulse Generator 模块产生脉冲驱动开关管。分别做两种开关频率下的仿真。 (1)使用理论计算的占空比(D=0.25),记录直流电压波形,计算稳态直流电压值,计算稳态直流纹波电压,并与理论公式比较,验证设计指标。 4、仿真过程:: A .建立模型: 建立仿真模型如下如所示 : B. 记录数据: 仿真算法选择ode23tb,最大步长为0.1s ,占空比D=0.25进行仿真,记录数据如下表所 C .仿真过程: 当f s =10KHz,L=0.375mH C=500μF, 占空比D=0.25,电流连续的临界状态时,记录稳态直流电压值V o =4.736V ,稳态直流电压理论值5V 计算稳态直流纹波电压的理论值 2(1D)0.025V 8s o o T V V CL -?==,通过图中得到直流纹波电压为0.0267V 当fs=10KHz,L=0.375mH, C=500μF,占空比D=0.25,电流连续的临界状态时, 由(1)o S L V D T I L -?= ,得电感电流波动理论值是1A ,由图像得到电感电流波动值是 1A ,与理论计算相符合 BUCK 电路闭环PID 控制系统 的MATLAB 仿真 一、课题简介 BUCK 电路是一种降压斩波器,降压变换器输出电压平均值Uo 总是小于输入电压U i 。通常电感中的电流是否连续,取决于开关频率、滤波电感L 和电容C 的数值。 简单的BUCK 电路输出的电压不稳定,会受到负载和外部的干扰,当加入PID 控制器,实现闭环控制。可通过采样环节得到PWM 调制波,再与基准电压进行比较,通过PID 控制器得到反馈信号,与三角波进行比较,得到调制后的开关波形,将其作为开关信号,从而实现BUCK 电路闭环PID 控制系统。 二、BUCK 变换器主电路参数设计 2.1设计及内容及要求 1、 输入直流电压(VIN):15V 2、 输出电压(VO):5V 3、 输出电流(IN):10A 4、 输出电压纹波峰-峰值 Vpp ≤50mV 5、 锯齿波幅值Um=1.5V 6、开关频率(fs):100kHz 7、采样网络传函H(s)=0.3 8、BUCK 主电路二极管的通态压降VD=0.5V ,电感中的电阻压降 VL=0.1V ,开关管导通压降 VON=0.5V,滤波电容C 与电解电容 RC 的乘积为 F *Ωμ75 2.2主电路设计 根据以上的对课题的分析设计主电路如下: 图2-1 主电路图 1、滤波电容的设计 因为输出纹波电压只与电容的容量以及ESR 有关, rr rr C L N 0.2V V R i I == ? (1) 电解电容生产厂商很少给出ESR ,但C 与R C 的乘积趋于常数,约为50~80μ*ΩF [3]。在本课题中取为75μΩ*F ,由式(1)可得R C =25mΩ,C =3000μF 。 2、滤波电感设计 开关管闭合与导通状态的基尔霍夫电压方程分别如式(2)、(3)所示: IN O L ON L ON /V V V V L i T ---=?(2) O L D L OFF /V V V L i T ++=? (3) off 1/on s T T f += (4) 由上得: L in o L D on V V V V L T i ---=? (5) 假设二极管的通态压降V D =0.5V ,电感中的电阻压降V L =0.1V ,开关管导通压降V ON =0.5V 。利用ON OFF S 1T T f +=,可得T ON =3.73μS ,将此值回代式(5),可得L =17.5μH 时序逻辑电路分析例题 1、分析下图时序逻辑电路。 解: 1、列出驱动方程:111==K J 1//122Q A AQ K J +== 2、列出状态方程: 将驱动方程代入JK 触发器的特性方程Q K JQ Q //*+=得: /1*1Q Q = 212/1//21//2/1*2Q AQ Q Q A Q Q A Q AQ Q +++= 3、列出输出方程: 21//2/1Q Q A Q AQ Y += 4、列出状态转换表: (1)当A=1时: 根据:/1*1Q Q =;21/2/1*2Q Q Q Q Q +=;/2/1Q Q Y =得: (2)当A=0时: 根据:/1*1Q Q =;2/1/21*2 Q Q Q Q Q +=;21Q Q Y =得 : 5、画状态转换图: 6、说明电路实现的逻辑功能: 此电路就是一个可逆4进制(二位二进制)计数器,CLK 就是计数脉冲输入端,A 就是加减控制端,Y 就是进位与借位输出端。当控制输入端A 为低电平0时,对输入的脉冲进行加法计数,计满4个脉冲,Y 输出端输出一个高电平进位信号。当控制输入端A 为高电平1时,对输入的脉冲进行减法计数,计满4个脉冲,Y 输出端输出一个高电平借位信号。 2、如图所示时序逻辑电路,试写出驱动方程、状态方程,画出状态图,说明该电路的功能。 解:驱动方程 ?? ?=⊕=1010K Q X J n ???=⊕=11 1K Q X J n 状态方程 ()()n n n n n n n n n n n n n n Q XQ Q Q X Q Q X Q Q Q X Q Q X Q Q X Q 0 1 1 1 1 010110 11+=⊕=+=⊕=++ 1J 1K C1 1J 1K C1 1 Q 0 Q CP X Z =1 =1 =1 & FF 1 FF 0 1 1渔港码头规划方案
multisimbuck电路仿真设计
实验二 时序逻辑电路的设计[1]
单元15-时序逻辑电路
太仓港-方案设计
Buck电路设计与MATLAB仿真
BUCK电路闭环控制系统的MATLAB仿真
时序逻辑电路分析举例
相关主题
文本预览